
Adaptive Control for Multi-Shaft with Web Materials Linkage Systems

 ,
,  ,
,  ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
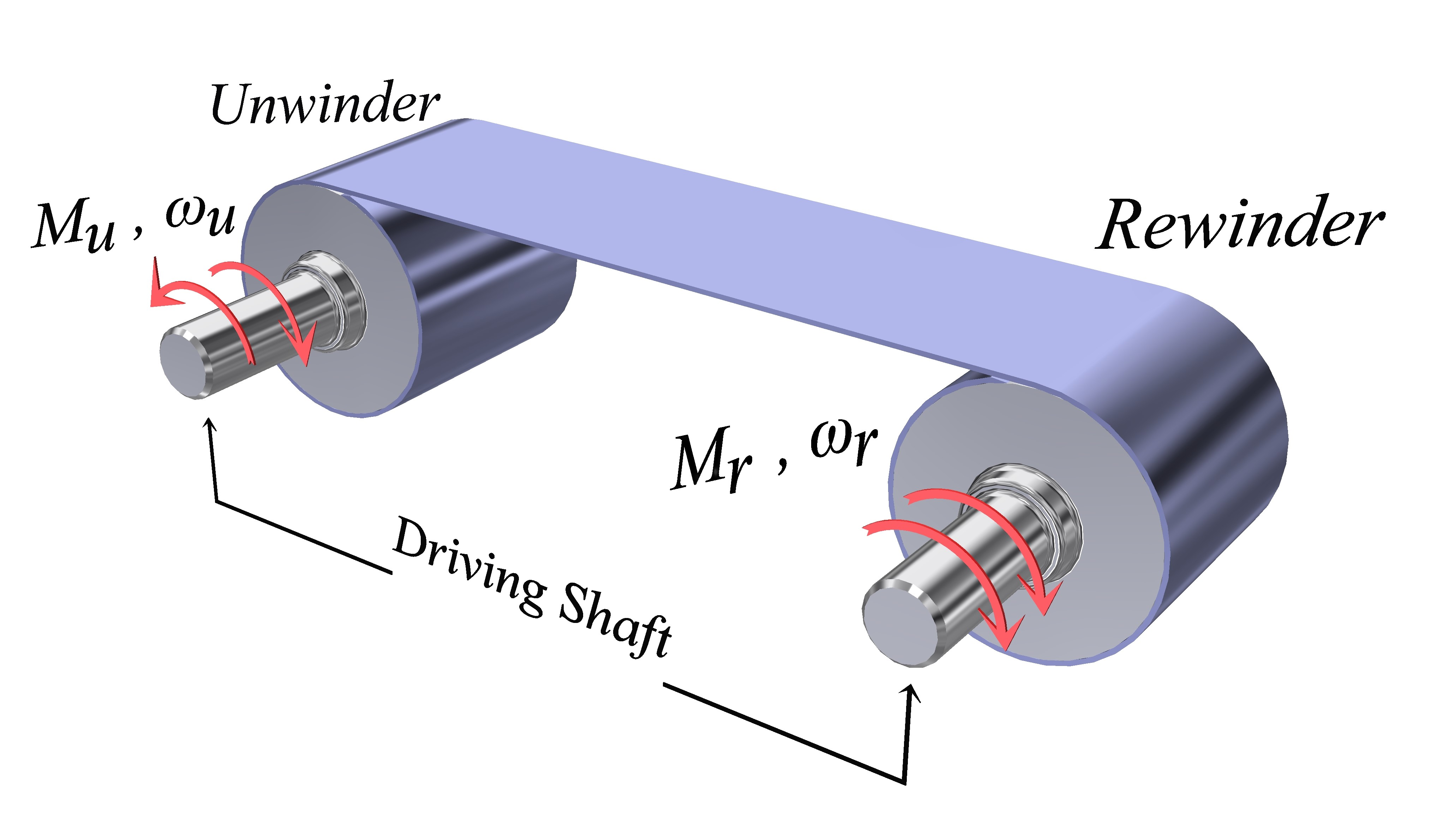
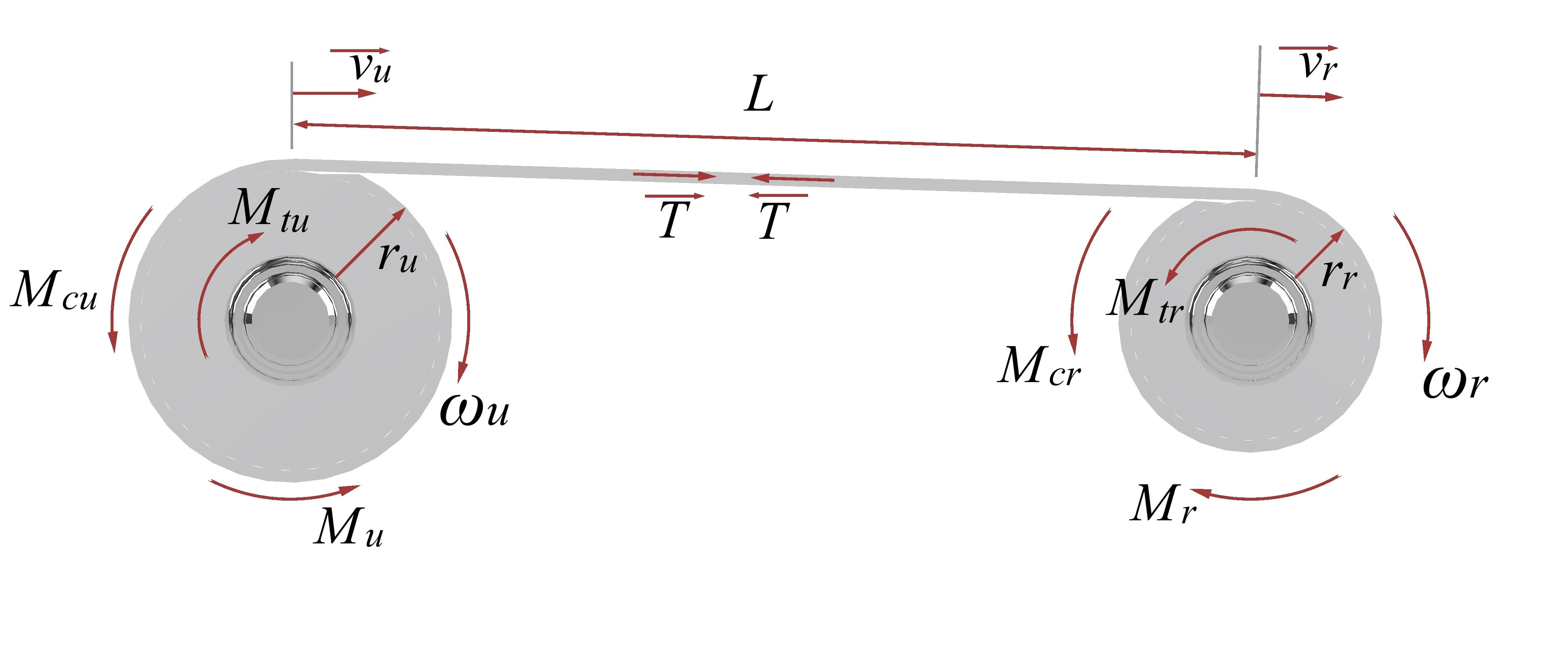
2. Roll-to-Roll Nonlinear System Model
2.1. Web Dynamic
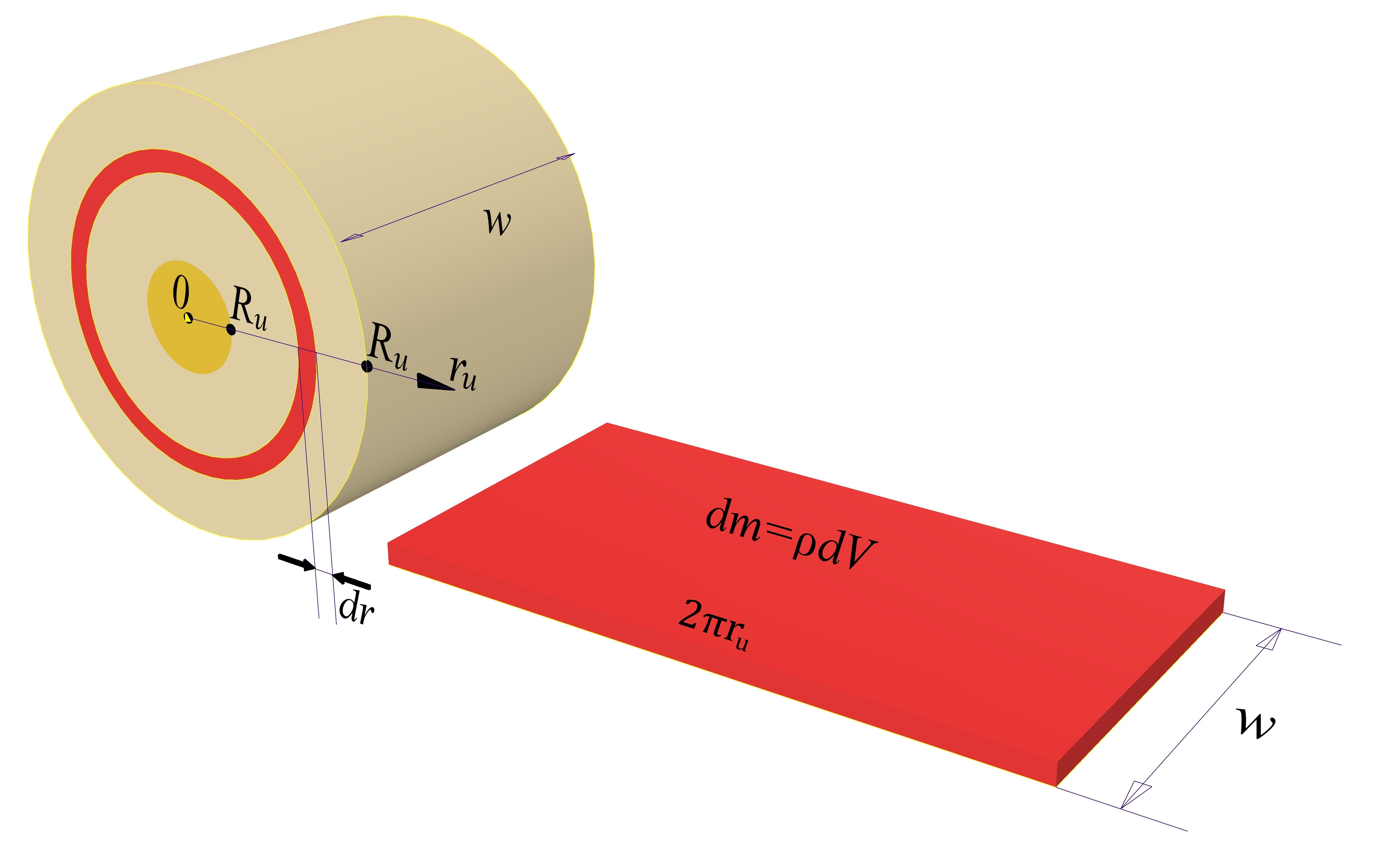
2.2. Dynamics of Rolls
2.2.1. Unwinder
2.2.2. Rewinder
2.3. Model of Single-Span Roll-to-Roll Web System
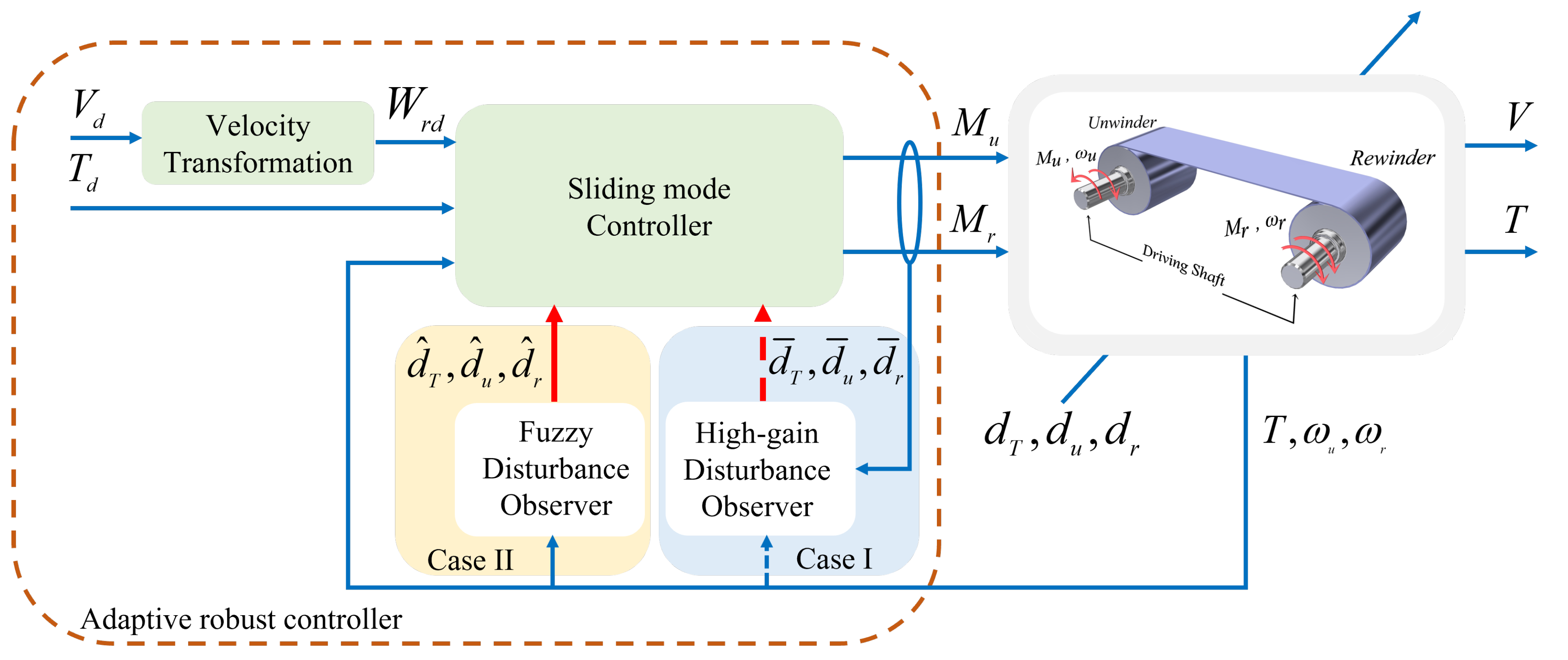
3. Sliding Mode Control Design
4. Adaptive Control Design
4.1. High-Gain Disturbance Observer Design
4.2. Fuzzy Disturbance Observer
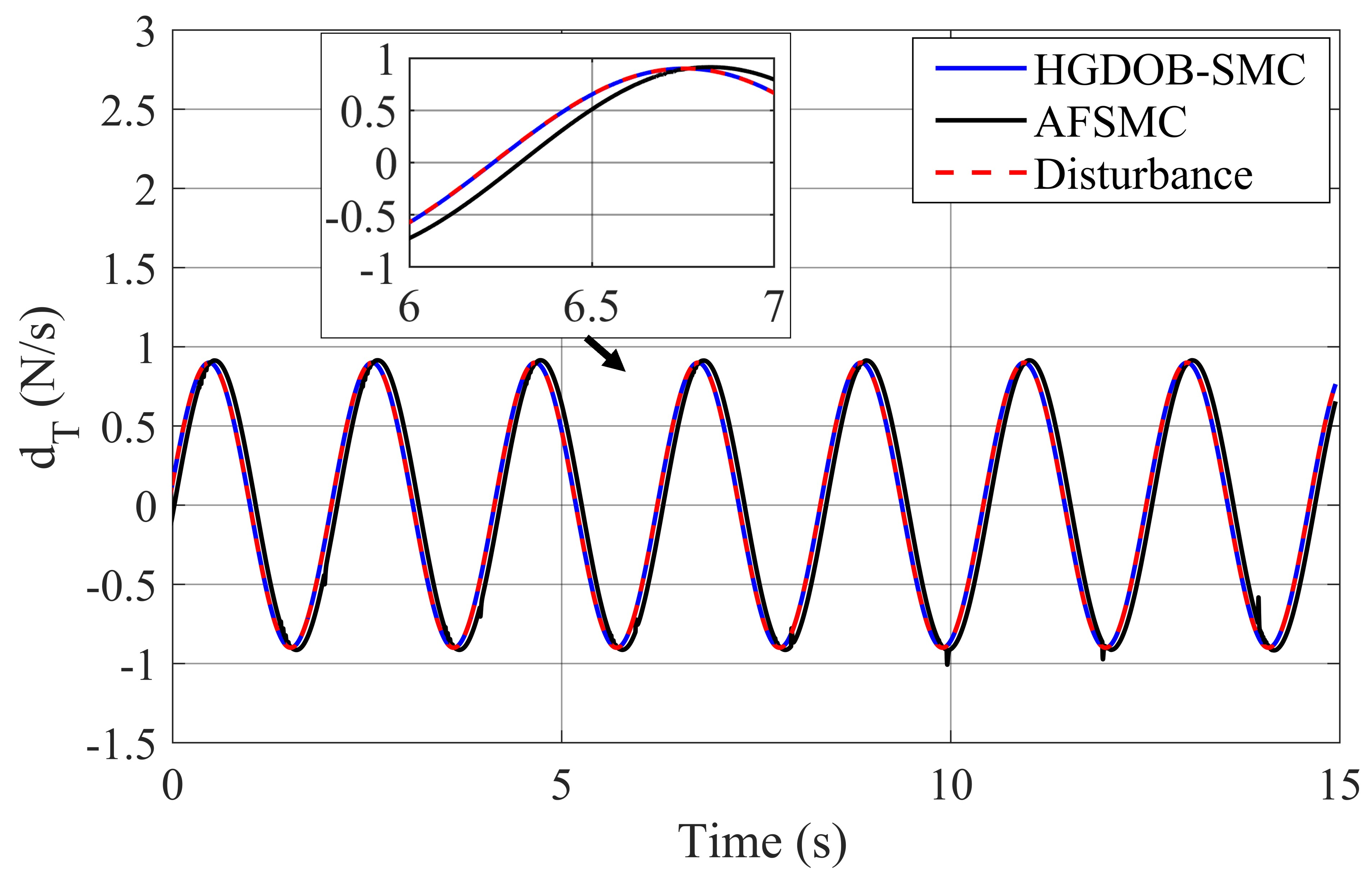
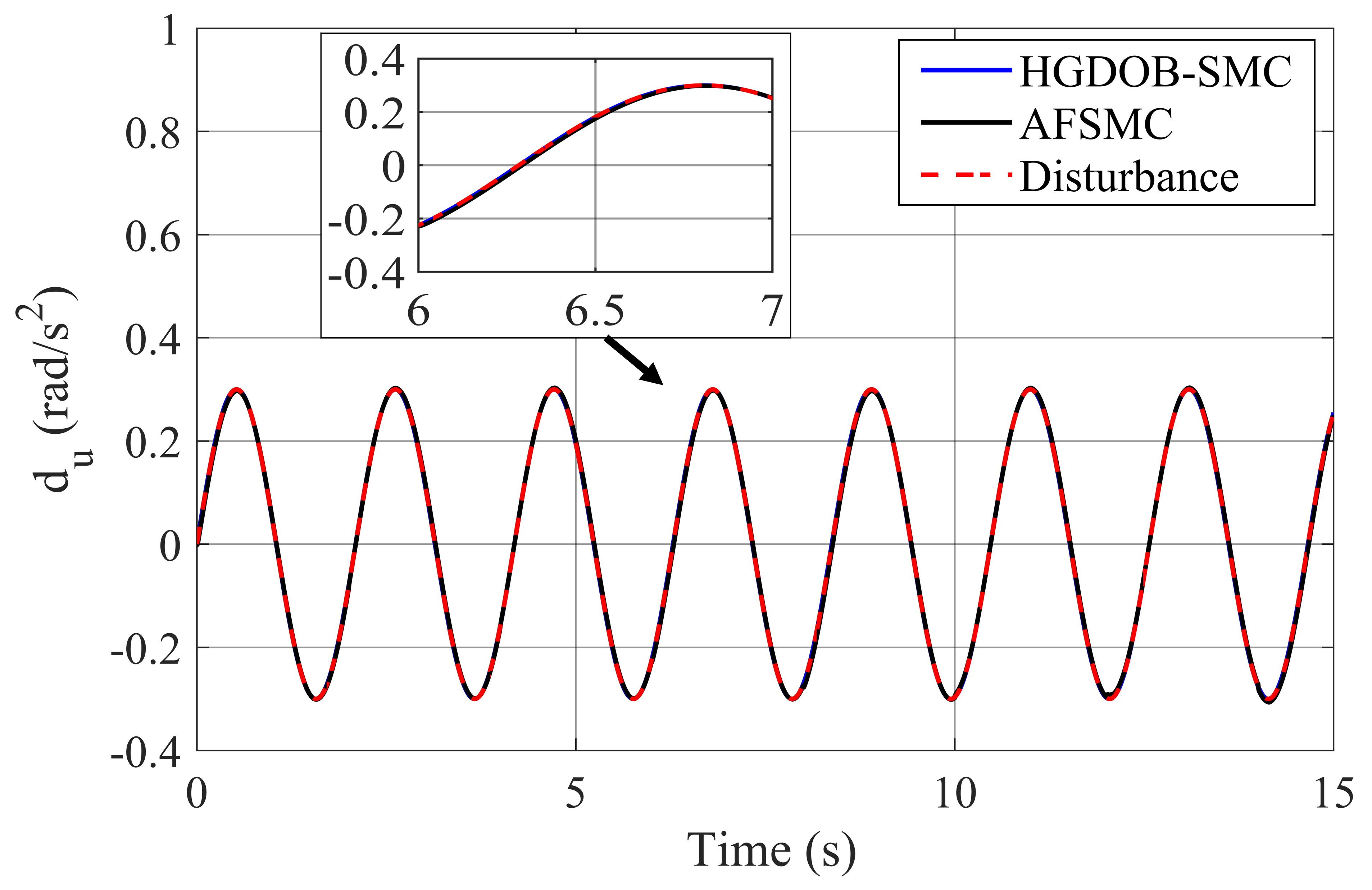
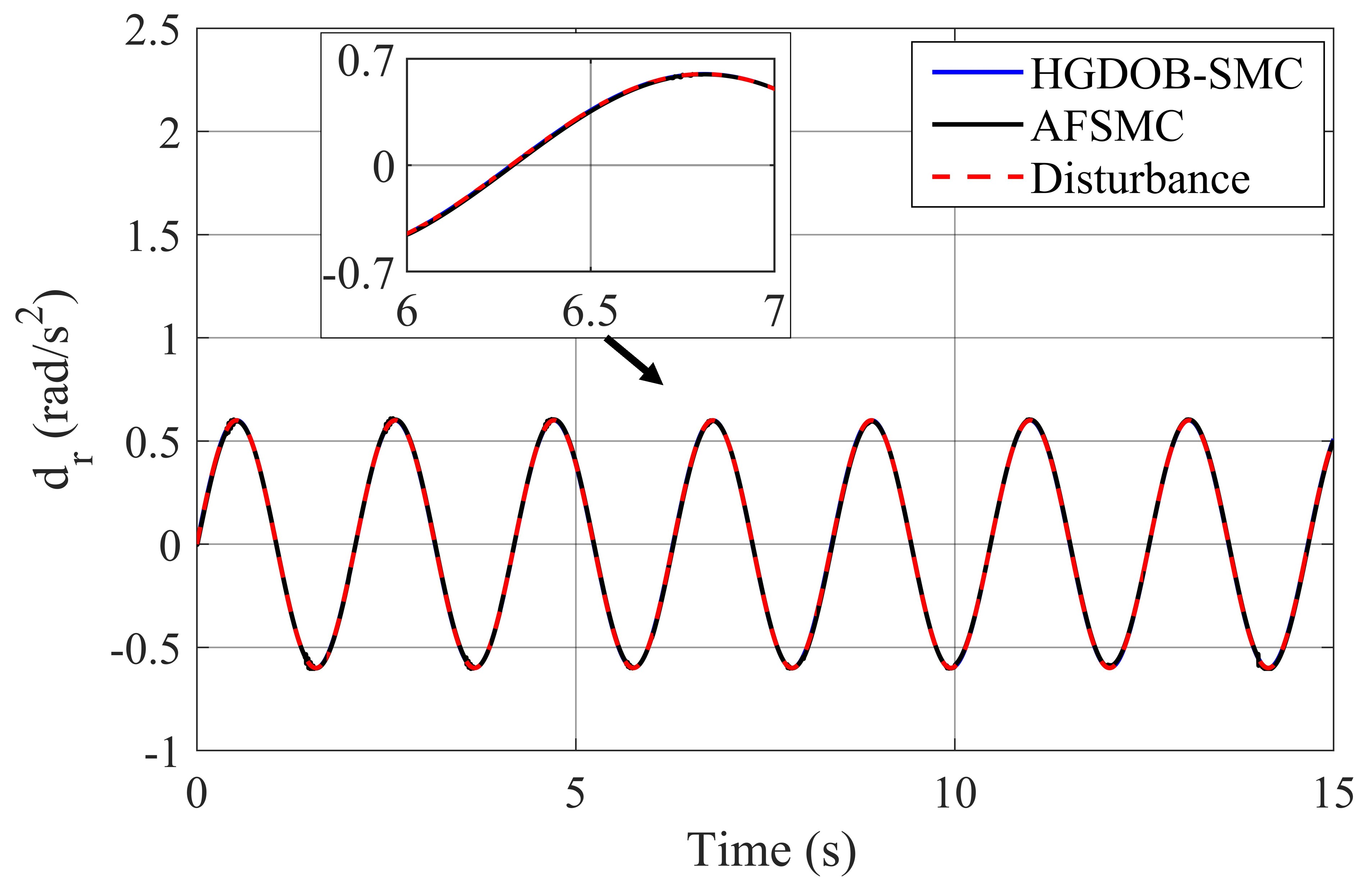
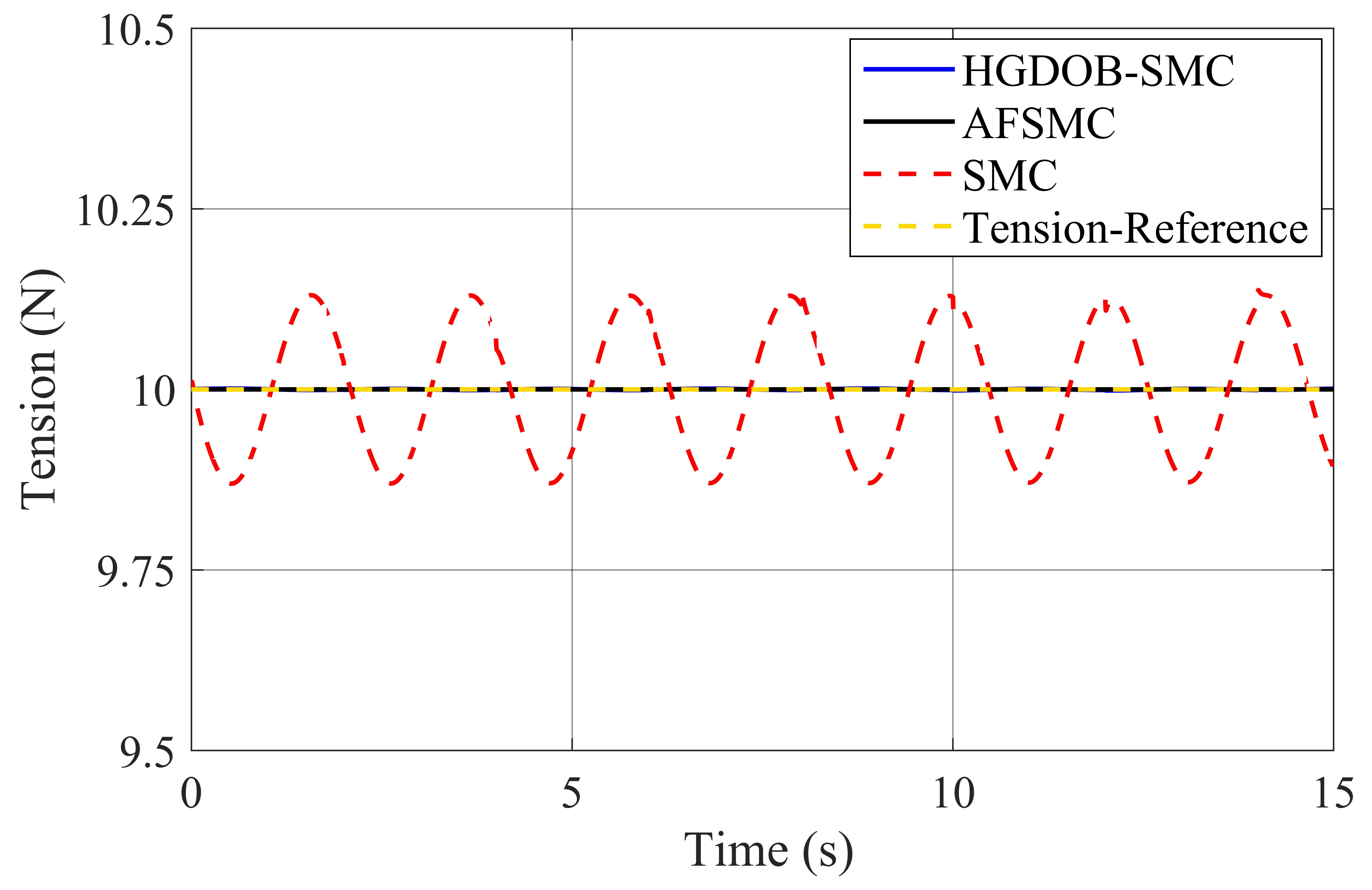
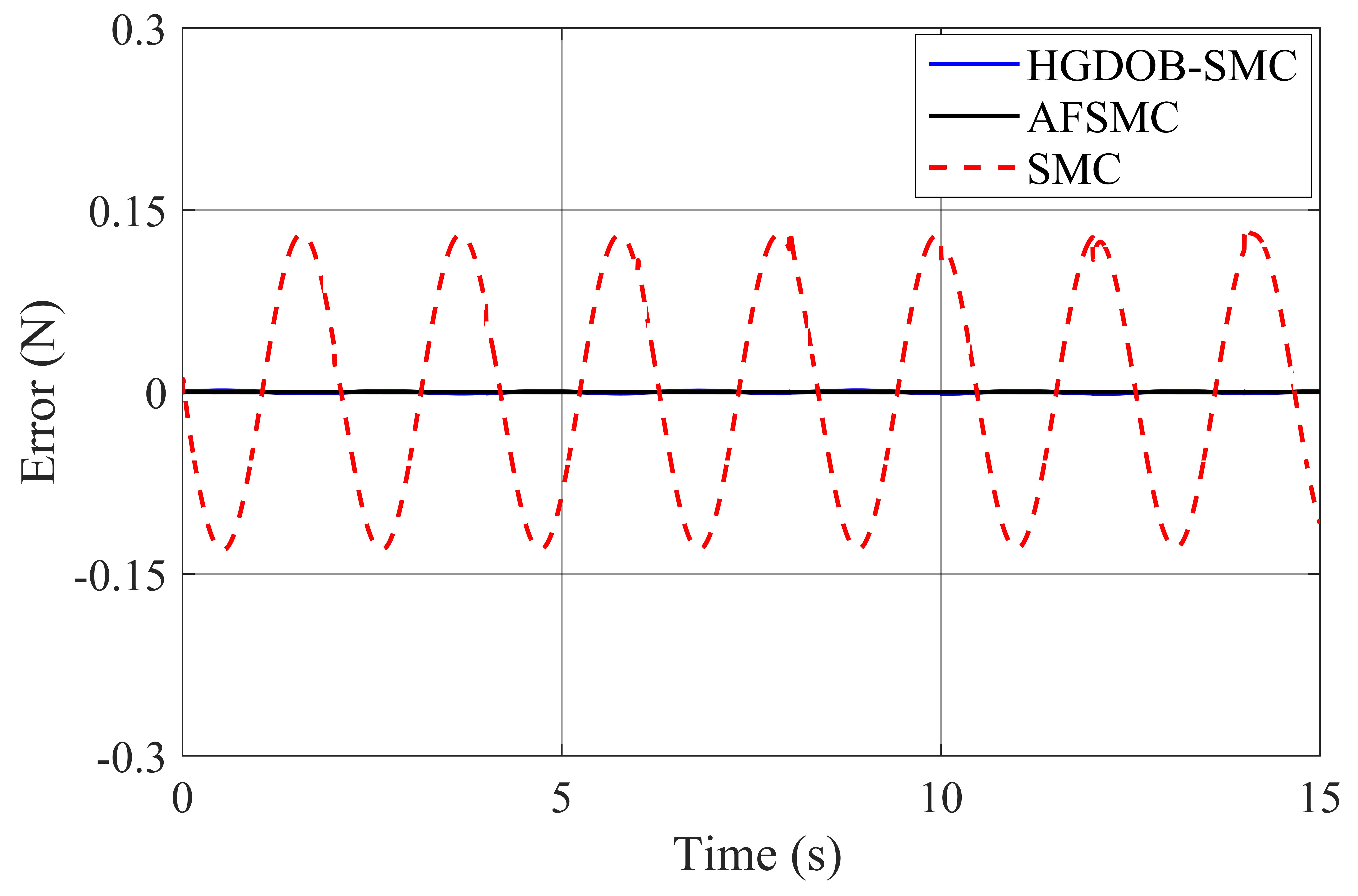
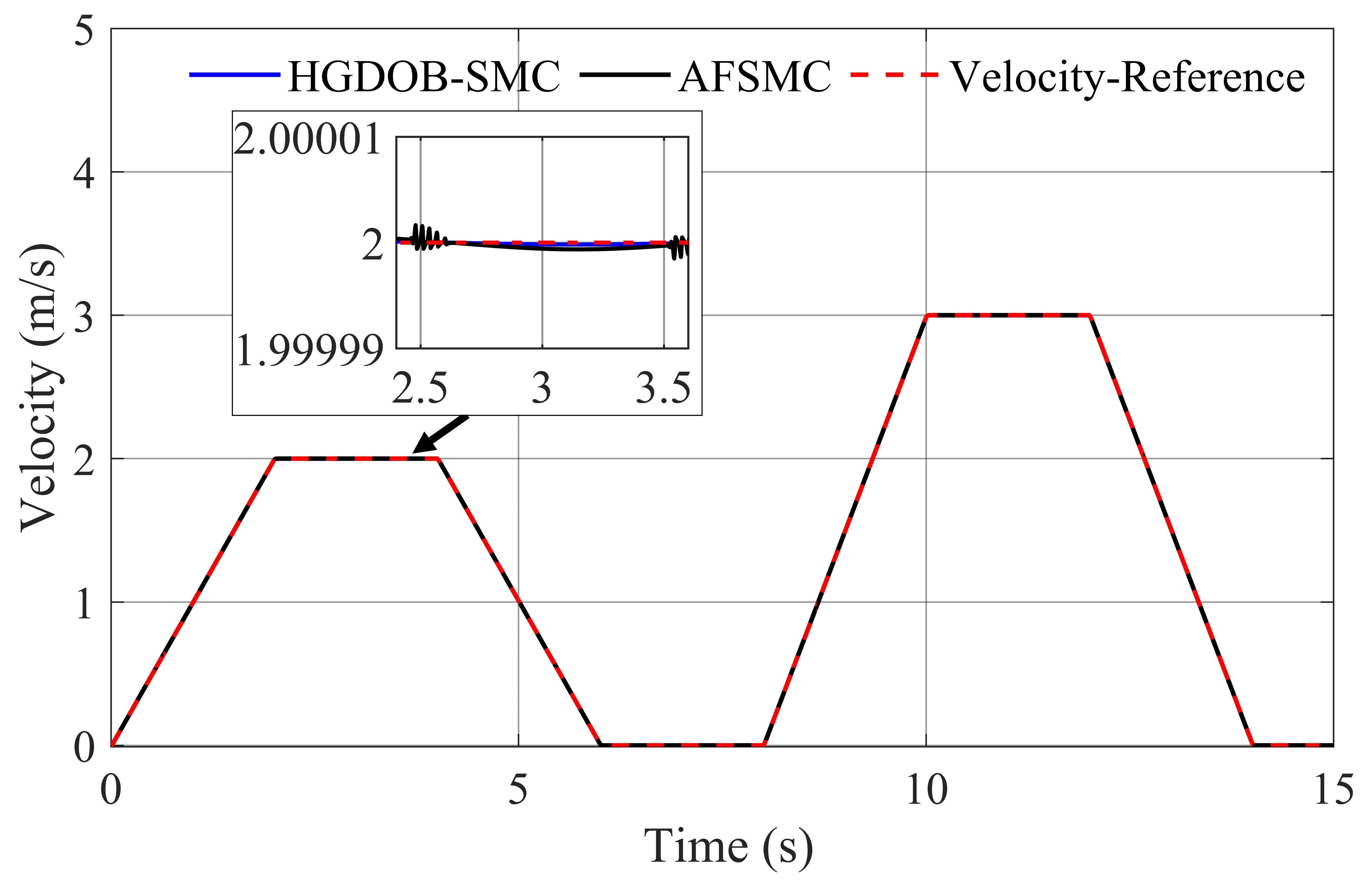
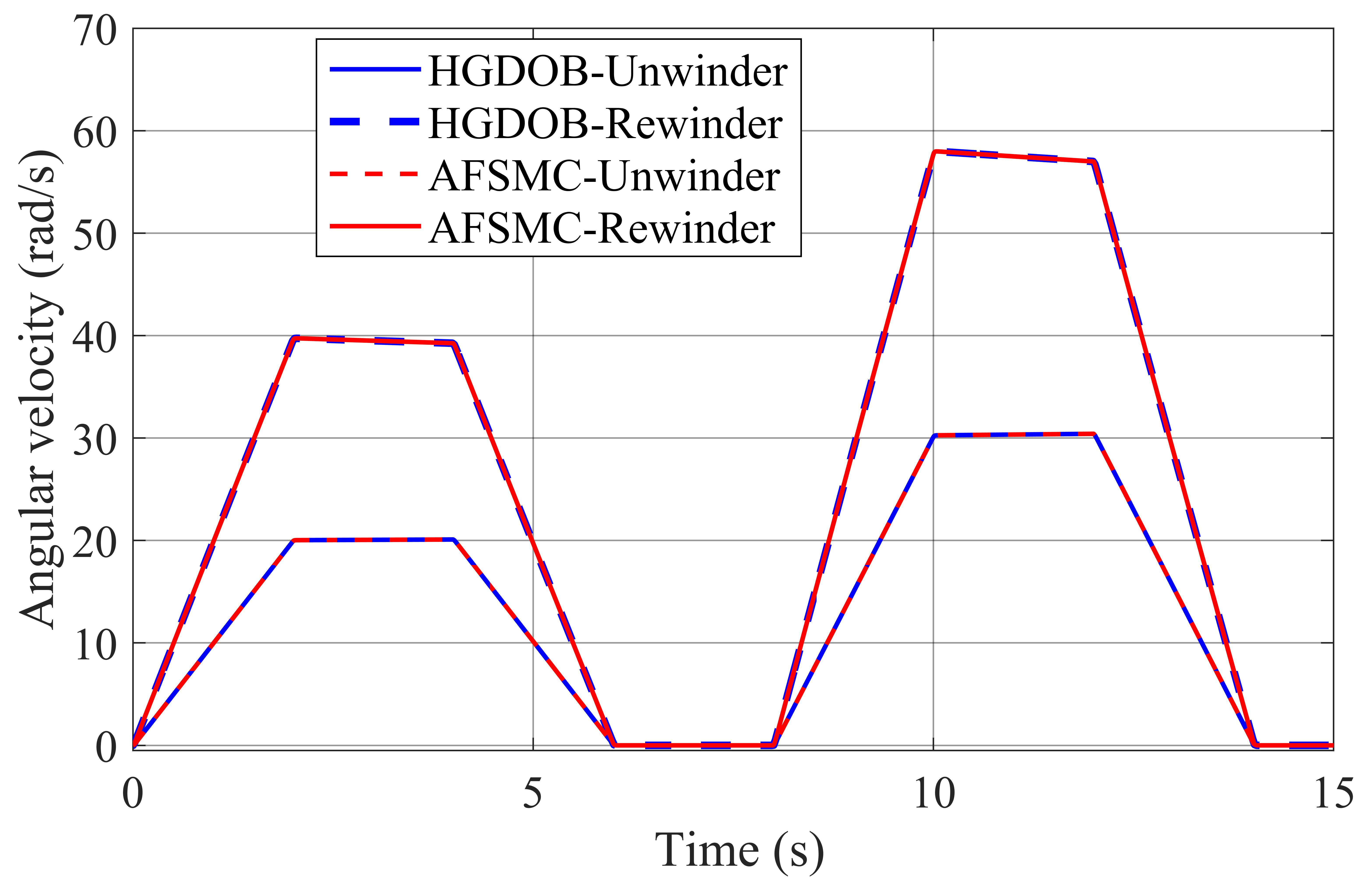
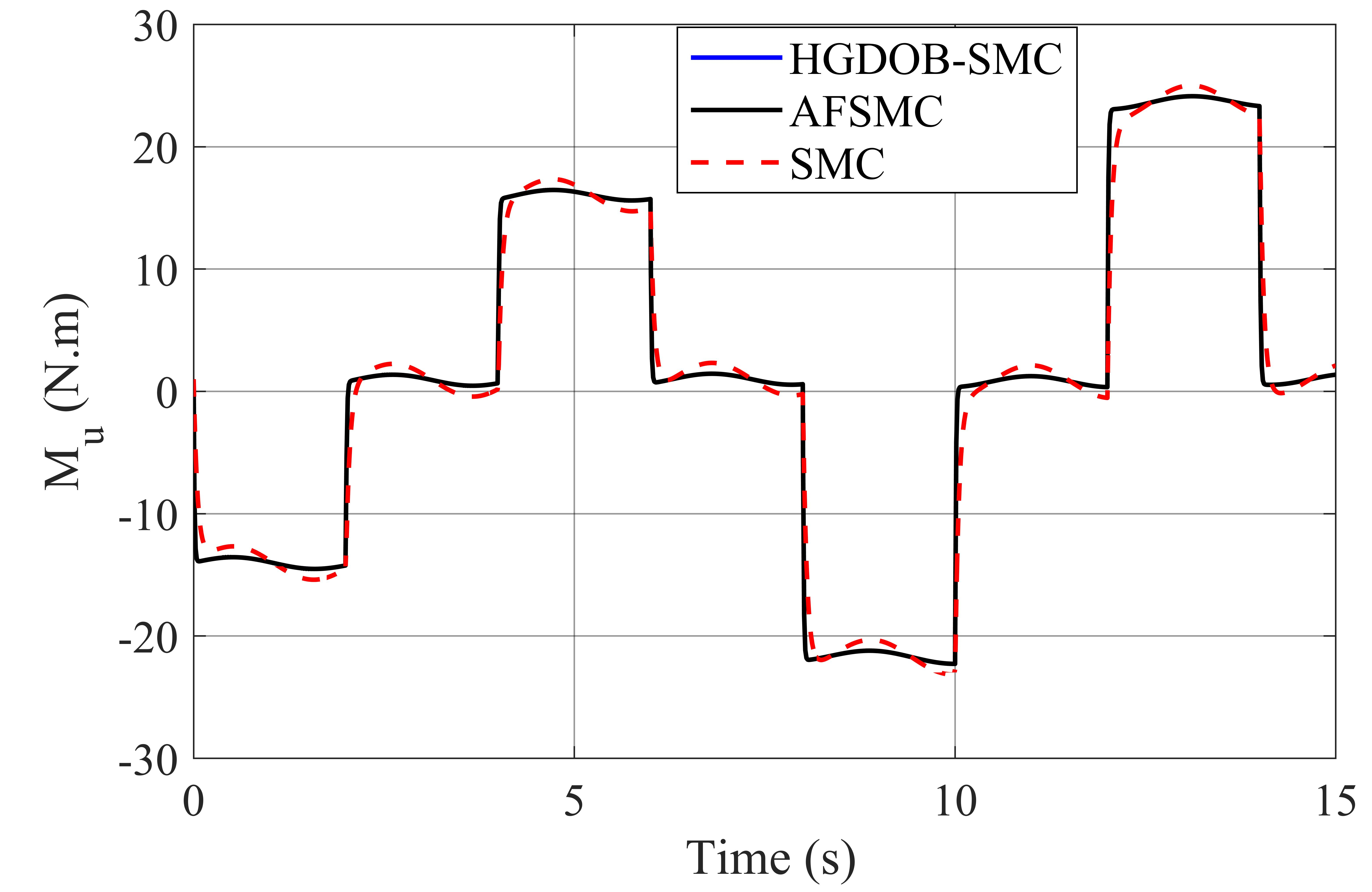
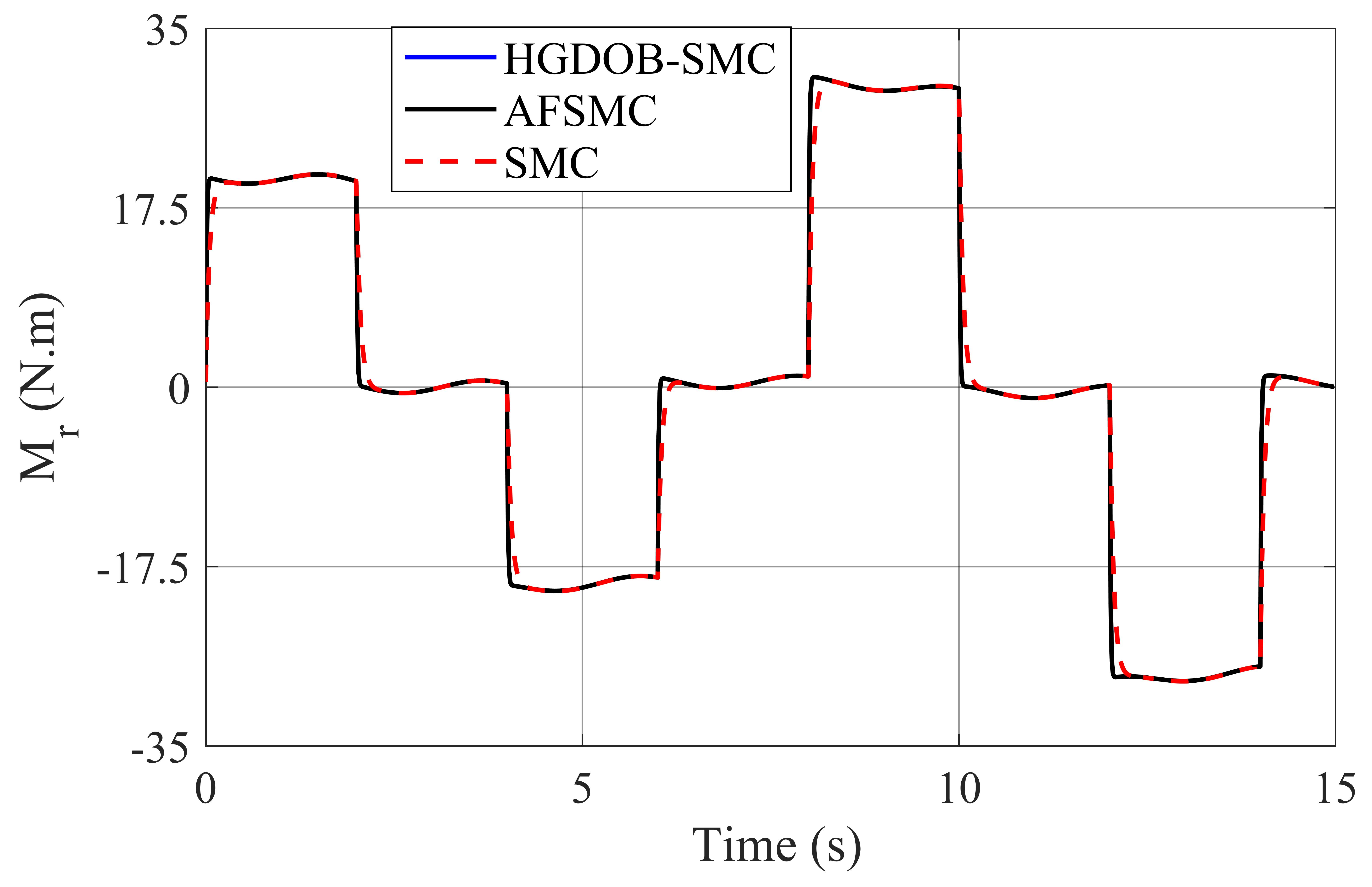
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Roisum, D.R.; Guzman, G.; Shams Es-haghi, S. Web Handling and Winding. In Roll-to-Roll Manufacturing: Process Elements and Recent Advances; John Wiley & Sons: Hoboken, NJ, USA, 2018; pp. 147–170. [Google Scholar]
- Krebs, F.; Tromholt, T.; Jørgensen, M. Upscaling of polymer solar cell fabrication using full roll-to-roll processing. Nanoscale 2010, 2, 873–886. [Google Scholar] [CrossRef]
- Chang, K.M.; Weng, C.P. Modeling and Control for a Coating Machine. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 2001, 44, 656–661. [Google Scholar] [CrossRef] [Green Version]
- Koç, H.; Knittel, D.; De Mathelin, M.; Abba, G. Modeling and robust control of winding systems for elastic webs. IEEE Trans. Control Syst. Technol. 2002, 10, 197–208. [Google Scholar] [CrossRef]
- Branca, C.; Pagilla, P.R.; Reid, K.N. Governing equations for web tension and web velocity in the presence of nonideal rollers. J. Dyn. Syst. Meas. Control Trans. ASME 2013, 135, 011018. [Google Scholar] [CrossRef]
- Shin, H.K. Distributed Control of Tension in Multi-Span Web Transport Systems. Ph.D. Thesis, Oklahoma State University, Stillwater, OK, USA, 1991. [Google Scholar]
- Choi, K.H.; Tran, T.T.; Kim, D.S. Back-stepping controller based web tension control for roll-to-roll web printed electronics system. J. Adv. Mech. Des. Syst. Manuf. 2011, 5, 7–21. [Google Scholar] [CrossRef] [Green Version]
- Bouchiba, B.; Hazzab, A.; Glaoui, H.; Fellah, M.K.; Bousserhane, I.; Sicard, P. Decentralized PI Controller for Multimotors Web Winding System. J. Autom. Mob. Robot. Intell. Syst. 2012, 6, 32–36. [Google Scholar]
- Zhang, G.; Furusho, J. Speed control of two-inertia system by PI/PID control. IEEE Trans. Ind. Electron. 2000, 47, 603–609. [Google Scholar] [CrossRef]
- Raul, P.R.; Pagilla, P.R. Design and implementation of adaptive PI control schemes for web tension control in roll-to-roll (R2R) manufacturing. ISA Trans. 2015, 56, 276–287. [Google Scholar] [CrossRef]
- Tong, T.L.; Duong, M.D.; Nguyen, D.H.; Nguyen, T.L. Web Tension Observer Based Control for Single-Span Roll to Roll Systems. In Advances in Engineering Research and Application; Sattler, K.U., Nguyen, D.C., Vu, N.P., Long, B.T., Puta, H., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 874–882. [Google Scholar]
- Thi, L.T.; Tung, L.N.; Thanh, C.D.; Quang, D.N.; Van, Q.N. Tension Regulation of Roll-to-roll Systems with Flexible Couplings. In Proceedings of the International Conference on System Science and Engineering (ICSSE) Tension, Dong Hoi, Vietnam, 20–21 July 2019; pp. 441–444. [Google Scholar]
- Wang, F.; Zou, Q.; Zong, Q. Robust adaptive backstepping control for an uncertain nonlinear system with input constraint based on Lyapunov redesign. Int. J. Control Autom. Syst. 2017, 15, 212–225. [Google Scholar] [CrossRef]
- Kim, H.H.; Kim, S.J.; Yoon, S.M.; Choi, Y.J.; Lee, M.C. Sliding mode control with sliding perturbation observer-based strategy for reducing scratch formation in hot rolling process. Appl. Sci. 2021, 11, 5526. [Google Scholar] [CrossRef]
- Jin, Z.; Zhang, W.; Liu, S.; Gu, M. Command-filtered backstepping integral sliding mode control with prescribed performance for ship roll stabilization. Appl. Sci. 2019, 9, 4288. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Mei, X.; Ma, L.; You, H.; Li, Z. Active disturbance rejection decoupling controller design for roll-to-roll printing machines. In Proceedings of the 2013 IEEE 3rd International Conference on Information Science and Technology, ICIST 2013, Yangzhou, China, 23–25 March 2013; pp. 111–116. [Google Scholar]
- Hou, Y.; Gao, Z.; Jiang, F.; Boulter, B.T. Active disturbance rejection control for web tension regulation. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No.01CH37228), Orlando, FL, USA, 4–7 December 2001; Volume 5, pp. 4974–4979. [Google Scholar]
- Thi, L.T.; Manh, C.N.; Nguyen, T.L. A Control Approach to Web Speed and Tension Regulation of Web Transport Systems Based on Dynamic Surface Control. J. Control Autom. Electr. Syst. 2021, 32, 573–581. [Google Scholar] [CrossRef]
- Boss, C.J.; Srivastava, V. A High-Gain Observer Approach to Robust Trajectory Estimation and Tracking for a Multi-Rotor UAV. arXiv 2021, arXiv:2103.13429. [Google Scholar]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-Gain Disturbance Observer-Based Backstepping Control with Output Tracking Error Constraint for Electro-Hydraulic Systems. IEEE Trans. Control Syst. Technol. 2014, 23, 787–795. [Google Scholar] [CrossRef]
- Apte, A.A.; Joshi, V.A.; Walambe, R.A.; Godbole, A.A. Speed Control of PMSM Using Disturbance Observer. IFAC-PapersOnLine 2016, 49, 308–313. [Google Scholar] [CrossRef]
- Lan, Y.H.; Zhou, L. Backstepping Control with Disturbance Observer for Permanent Magnet Synchronous Motor. J. Control Sci. Eng. 2018, 2018, 4938389. [Google Scholar] [CrossRef]
- Dong, X.; Ke, L.; Cheng, L.; Zhang, H. Improved Backstepping Control with Nonlinear Disturbance Observer for the Speed Control of Permanent Magnet Synchronous Motor. J. Electr. Eng. Technol. 2019, 14, 275–285. [Google Scholar]
- Bessa, W.M.; Barrêto, R.S.S. Adaptive fuzzy sliding mode control of uncertain nonlinear systems. Controle Autom. 2010, 21, 117–126. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Dong, J. Disturbance-observer-based adaptive fuzzy control for nonlinear state constrained systems with input saturation and input delay. Fuzzy Sets Syst. 2020, 392, 77–92. [Google Scholar] [CrossRef]
- Wei, W.; Xia, S.; Pang, J.; Chen, Y. Fuzzy Disturbance Observer-based Adaptive Backstepping Sliding Mode Control of Manipulators. In Proceedings of the 9th IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, CYBER 2019, Suzhou, China, 29 July–2 August 2019; pp. 1224–1229. [Google Scholar]
- Nguyen, A.T.; Dequidt, A.; Nguyen, V.A.; Vermeiren, L.; Dambrine, M. Fuzzy descriptor tracking control with guaranteed error-bound for robot manipulators. Trans. Inst. Meas. Control 2021, 43, 1404–1415. [Google Scholar] [CrossRef]
- Manh, C.N.; Manh, T.N.; Thi Kim, D.H.; Van, Q.N.; Nguyen, T.L. An adaptive neural network-based controller for car driving simulators. Int. J. Control 2021, 1–33. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems; Pearson Education, Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Le, D.T.; Nguyen, D.T.; Le, N.D.; Nguyen, T.L. Traction control based on wheel slip tracking of a quarter-vehicle model with high-gain observers. Int. J. Dyn. Control 2021, 1–8. [Google Scholar] [CrossRef]
- Sontag, E.; Agrachev, A.; Morse, A.; Sussmann, H.; Utkin, V. Input to State Stability: Basic Concepts and Results. In Nonlinear and Optimal Control Theory; Springer: Berlin/Heidelberg, Germany, 1970; Volume 1932, pp. 163–220. [Google Scholar]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, V.T.; Le, D.T.; Nguyen-Thi, V.-A.; Nguyen, D.H.; Tong, T.L.; Nguyen, D.D.; Nguyen, T.L. Adaptive Control for Multi-Shaft with Web Materials Linkage Systems. Inventions 2021, 6, 76. https://doi.org/10.3390/inventions6040076
Dang VT, Le DT, Nguyen-Thi V-A, Nguyen DH, Tong TL, Nguyen DD, Nguyen TL. Adaptive Control for Multi-Shaft with Web Materials Linkage Systems. Inventions. 2021; 6(4):76. https://doi.org/10.3390/inventions6040076
Chicago/Turabian StyleDang, Van Trong, Duc Thinh Le, Van-Anh Nguyen-Thi, Danh Huy Nguyen, Thi Ly Tong, Duy Dinh Nguyen, and Tung Lam Nguyen. 2021. "Adaptive Control for Multi-Shaft with Web Materials Linkage Systems" Inventions 6, no. 4: 76. https://doi.org/10.3390/inventions6040076
APA StyleDang, V. T., Le, D. T., Nguyen-Thi, V. -A., Nguyen, D. H., Tong, T. L., Nguyen, D. D., & Nguyen, T. L. (2021). Adaptive Control for Multi-Shaft with Web Materials Linkage Systems. Inventions, 6(4), 76. https://doi.org/10.3390/inventions6040076