
Mechanical Chaotic Duffing System with Magnetic Springs

 , , , , and
, , , , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. General Considerations
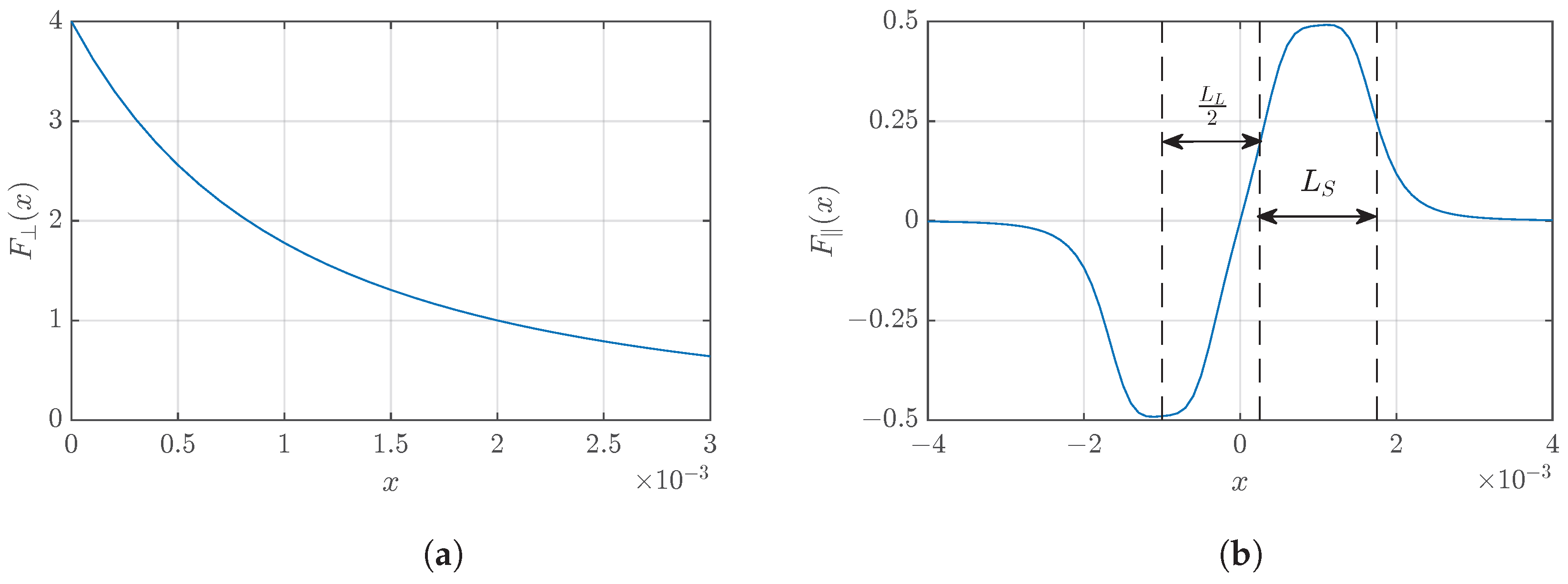
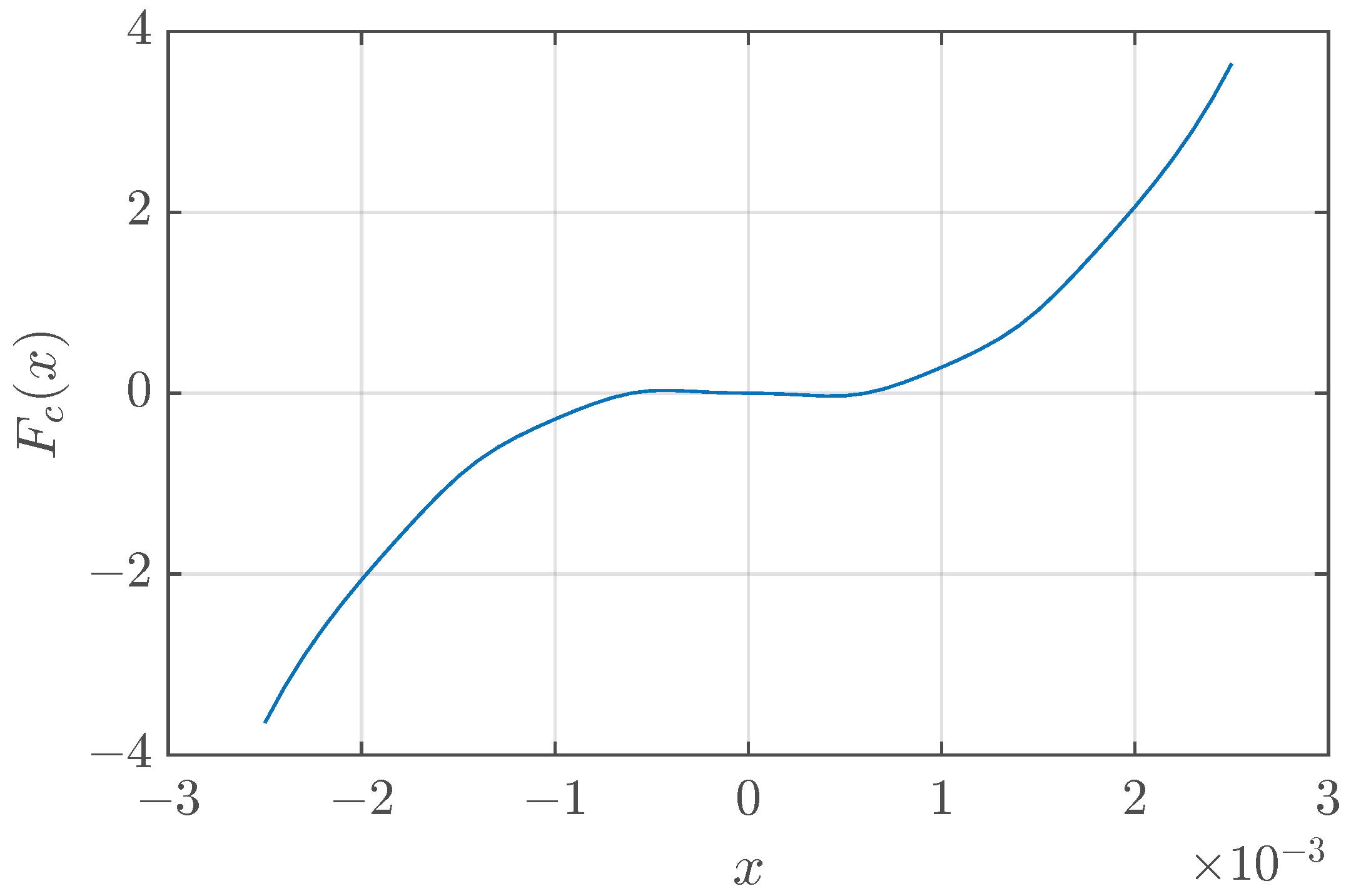
2.2. Choice of Nonlinear Springs
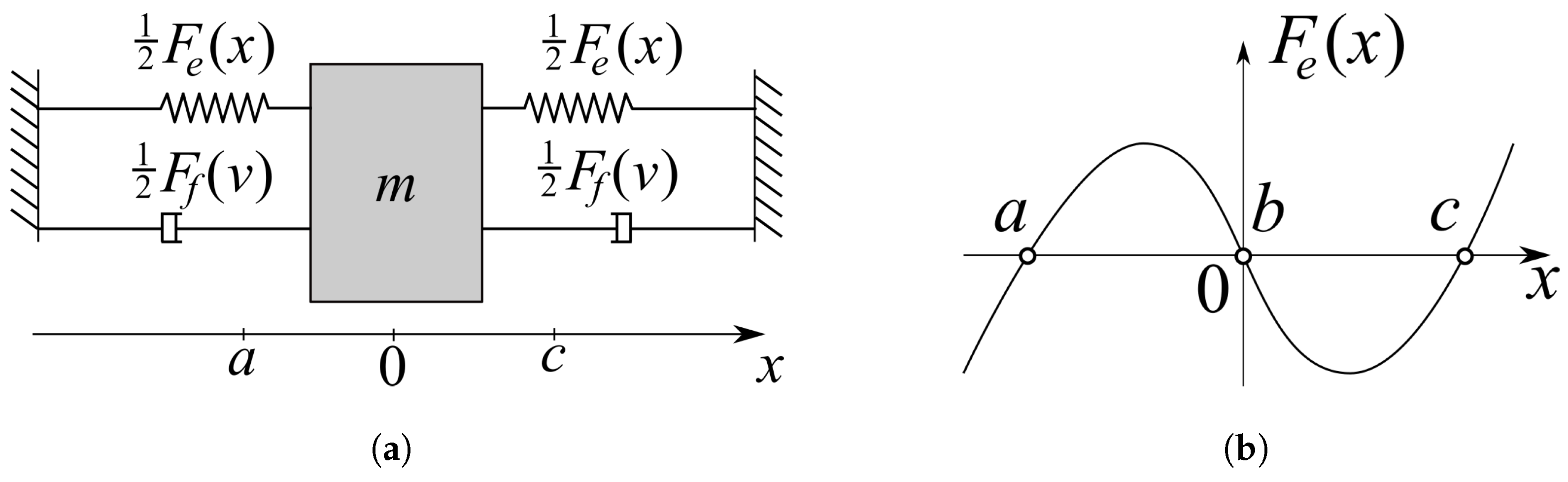
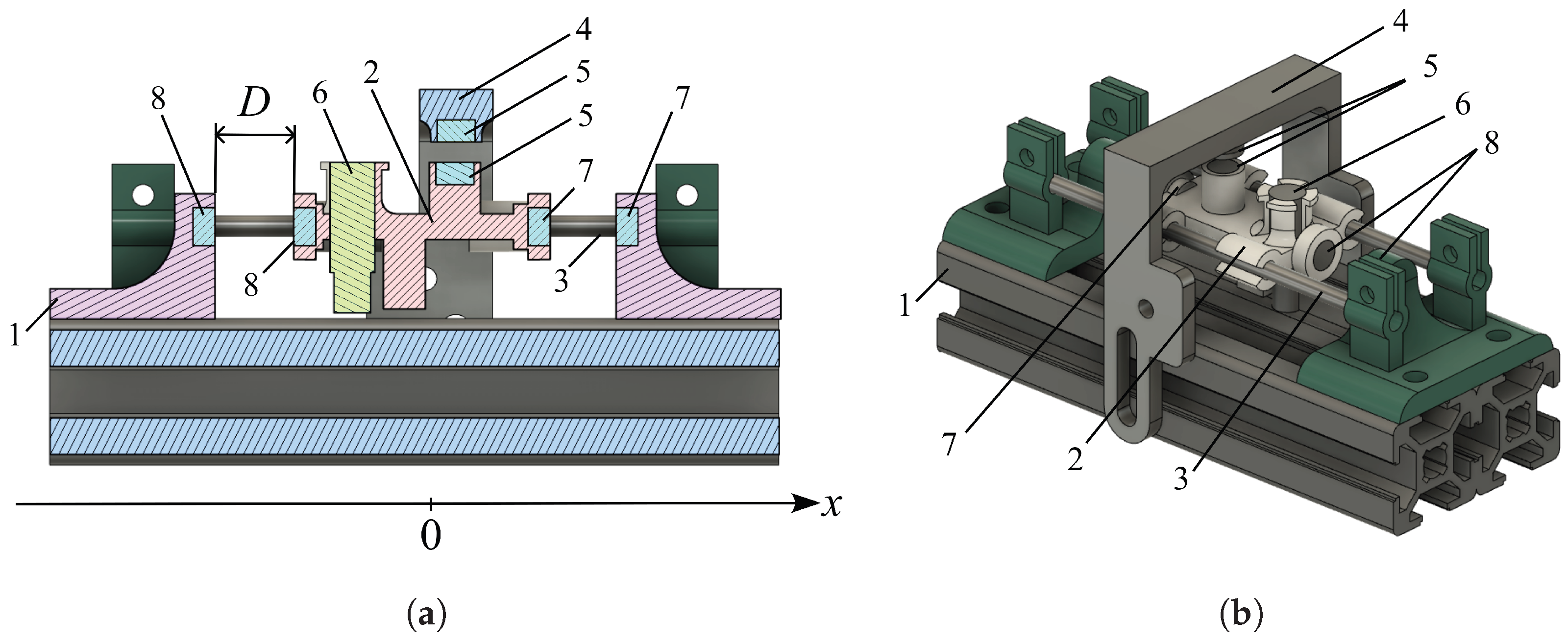
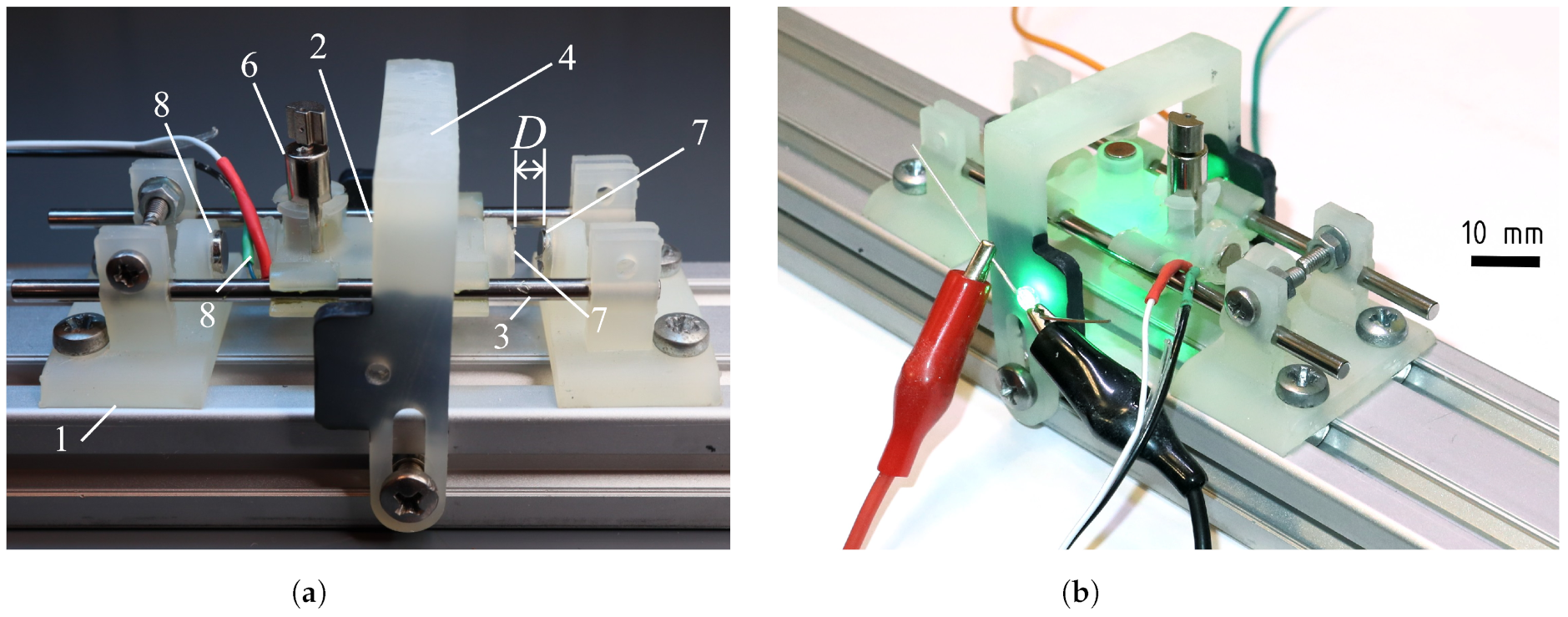
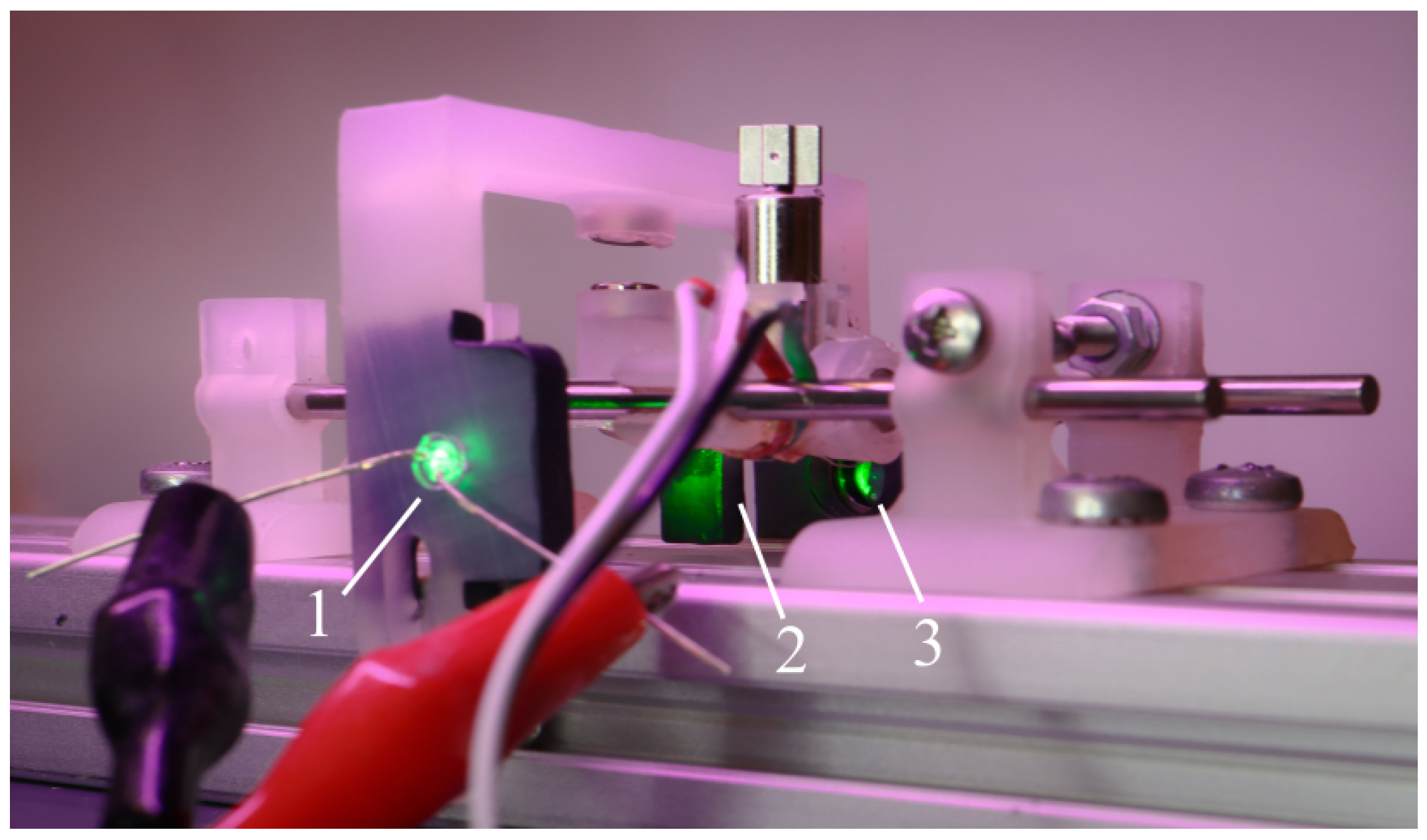
2.3. Design of the Mechanical Oscillator
2.4. Equation of Nonlinear Friction
2.5. Equations of a System Excited by a Vibration Motor
3. Results
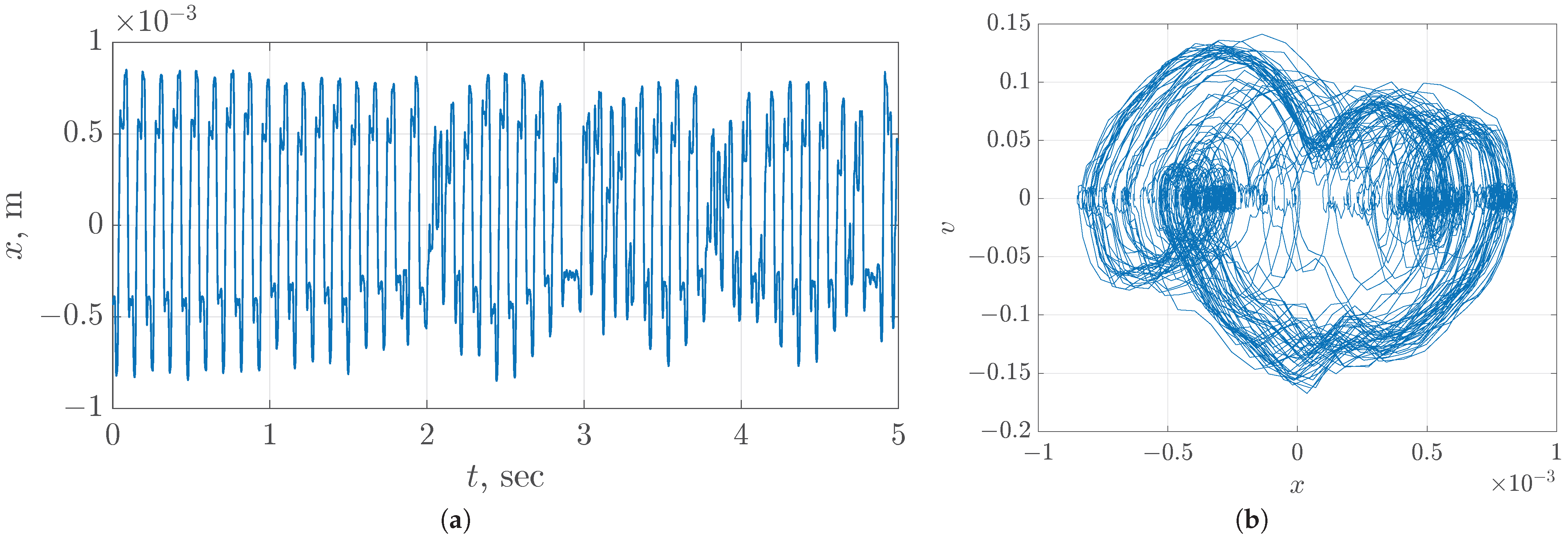
3.1. Numerical Analysis
3.2. Experimental Results
4. Discussion
4.1. Correspondence between Model and Experiment
4.2. Possible Applications and Improvements
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- d’Humieres, D.; Beasley, M.; Huberman, B.; Libchaber, A. Chaotic states and routes to chaos in the forced pendulum. Phys. Rev. A 1982, 26, 3483. [Google Scholar] [CrossRef]
- Richter, P.H.; Scholz, H.J. Chaos in classical mechanics: The double pendulum. In Stochastic Phenomena and Chaotic Behaviour in Complex Systems; Springer: Berlin/Heidelberg, Germany, 1984; pp. 86–97. [Google Scholar]
- Lin, R.; Ewins, D. Chaotic vibration of mechanical systems with backlash. Mech. Syst. Signal Process. 1993, 7, 257–272. [Google Scholar] [CrossRef]
- Li, D.; Xiang, J. Chaotic motions of an airfoil with cubic nonlinearity in subsonic flow. J. Aircr. 2008, 45, 1457–1460. [Google Scholar]
- Abdelkefi, A.; Vasconcellos, R.; Marques, F.D.; Hajj, M.R. Bifurcation analysis of an aeroelastic system with concentrated nonlinearities. Nonlinear Dyn. 2012, 69, 57–70. [Google Scholar] [CrossRef]
- Golouje, Y.N.; Abtahi, S.M. Chaotic dynamics of the vertical model in vehicles and chaos control of active suspension system via the fuzzy fast terminal sliding mode control. J. Mech. Sci. Technol. 2021, 35, 31–43. [Google Scholar] [CrossRef]
- Xue, Q.; Leung, H.; Wang, R.; Liu, B.; Huang, L.; Guo, S. The chaotic dynamics of drilling. Nonlinear Dyn. 2016, 83, 2003–2018. [Google Scholar] [CrossRef]
- Abro, K.A.; Atangana, A. Numerical and mathematical analysis of induction motor by means of AB–fractal–fractional differentiation actuated by drilling system. Numer. Methods Part. Differ. Equ. 2022, 38, 293–307. [Google Scholar] [CrossRef]
- Demirkol, A.S.; Tavas, V.; Ozoguz, S.; Toker, A. High frequency chaos oscillators with applications. In Proceedings of the 2007 18th European Conference on Circuit Theory and Design, Sevilla, Spain, 27–30 August 2007; pp. 1026–1029. [Google Scholar]
- Karimov, T.; Druzhina, O.; Karimov, A.; Tutueva, A.; Ostrovskii, V.; Rybin, V.; Butusov, D. Single-coil metal detector based on spiking chaotic oscillator. Nonlinear Dyn. 2021, 107, 1295–1312. [Google Scholar] [CrossRef]
- Minati, L.; Tokgöz, K.K.; Ito, H. Distributed sensing via the ensemble spectra of uncoupled electronic chaotic oscillators. Chaos Solitons Fractals 2022, 155, 111749. [Google Scholar] [CrossRef]
- Karimov, T.; Druzhina, O.; Vatnik, V.; Ivanova, E.; Kulagin, M.; Ponomareva, V.; Voroshilova, A.; Rybin, V. Sensitivity Optimization and Experimental Study of the Long-Range Metal Detector Based on Chaotic Duffing Oscillator. Sensors 2022, 22, 5212. [Google Scholar] [CrossRef]
- Sahin, M.; Cam Taskiran, Z.; Guler, H.; Hamamci, S. Simulation and implementation of memristive chaotic system and its application for communication systems. Sens. Actuators A Phys. 2019, 290, 107–118. [Google Scholar] [CrossRef]
- Dmitriev, A.; Efremova, E.; Itskov, V.; Petrosyan, M.; Ryzhov, A.; Turkanov, I. Direct Chaotic Ultra-Wideband Wireless Communications in the Very High Frequency and Ultra High Frequency Radio Bands. J. Commun. Technol. Electron. 2022, 67, 1013–1021. [Google Scholar] [CrossRef]
- Fellah, R.; Azzaz, M.S.; Tanougast, C.; Kaibou, R. Design of a simple and low cost chaotic signal generation circuit for UWB applications. Eur. Phys. J. Spec. Top. 2021, 230, 3439–3447. [Google Scholar] [CrossRef]
- Addabbo, T.; Fort, A.; Mugnaini, M.; Petra, N.; Takaloo, H.; Vignoli, V. Self-tunable chaotic true random bit generator in current-mode CMOS circuit with nonlinear distortion analysis. Int. J. Circuit Theory Appl. 2019, 47, 1877–1892. [Google Scholar] [CrossRef]
- Zhang, H.; Li, X.; Chuai, R.; Zhang, Y. Chaotic Micromixer Based on 3D Horseshoe Transformation. Micromachines 2019, 10, 398. [Google Scholar] [CrossRef] [Green Version]
- Barceló, J.; de Paúl, I.; Bota, S.; Segura, J.; Verd, J. Chaotic signal generation in the MHz range with a monolithic CMOS-MEMS microbeam resonator. In Proceedings of the 2019 IEEE 32nd International Conference on Micro Electro Mechanical Systems (MEMS), Seoul, Republic of Korea, 27–31 January 2019; pp. 1037–1040. [Google Scholar]
- Zheng, T.; Yang, W.; Sun, J.; Xiong, X.; Li, Z.; Zou, X. Parameters optimization method for the time-delayed reservoir computing with a nonlinear duffing mechanical oscillator. Sci. Rep. 2021, 11, 997. [Google Scholar] [CrossRef]
- Epureanu, B.I. Chaotic Vibration-Based Damage Detection in Fluid-Structural Systems; Springer: Dordrecht, The Netherlands, 2003; pp. 43–58. [Google Scholar]
- Zhang, M.; Wang, C.; Yan, C.; Li, H. Design and Dynamic Analysis of a Four-Degree-of-Freedom Chaotic Vibrating Screen. Shock Vib. 2021, 2021, 8830428. [Google Scholar] [CrossRef]
- Duffing, G. Erzwungene Schwingungen Bei Veränderlicher Eigenfrequenz und Ihre Technische Bedeutung; Number 41-42; Vieweg: Braunschweig, Germany, 1918. [Google Scholar]
- Shaw, S.W.; Rand, R.H. The transition to chaos in a simple mechanical system. Int. J. Non-Linear Mech. 1989, 24, 41–56. [Google Scholar] [CrossRef]
- Berger, J.; Nunes, G., Jr. A mechanical Duffing oscillator for the undergraduate laboratory. Am. J. Phys. 1997, 65, 841–846. [Google Scholar] [CrossRef]
- Margielewicz, J.; Gąska, D.; Litak, G.; Wolszczak, P.; Zhou, S. Energy Harvesting in a System with a Two-Stage Flexible Cantilever Beam. Sensors 2022, 22, 7399. [Google Scholar] [CrossRef]
- Brunetti, M.; Mitura, A.; Romeo, F.; Warminski, J. Nonlinear dynamics of bistable composite cantilever shells: An experimental and modelling study. J. Sound Vib. 2022, 526, 116779. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Q.; Yan, B.; Luo, Y.; Zhang, X. A Stewart isolator with high-static-low-dynamic stiffness struts based on negative stiffness magnetic springs. J. Sound Vib. 2018, 422, 390–408. [Google Scholar] [CrossRef]
- Mrak, B.; Lenaerts, B.; Driesen, W.; Desmet, W. Optimal magnetic spring for compliant actuation—Validated torque density benchmark. Actuators 2019, 8, 18. [Google Scholar] [CrossRef] [Green Version]
- Poltschak, F.; Ebetshuber, P. Design of integrated magnetic springs for linear oscillatory actuators. IEEE Trans. Ind. Appl. 2018, 54, 2185–2192. [Google Scholar] [CrossRef]
- Qiu, D.; Seguy, S.; Paredes, M. A novel design of cubic stiffness for a Nonlinear Energy Sink (NES) based on conical spring. In Advances on Mechanics, Design Engineering and Manufacturing; Springer: Berlin/Heidelberg, Germany, 2017; pp. 565–573. [Google Scholar]
- Rivlin, B.; Elata, D. Design of nonlinear springs for attaining a linear response in gap-closing electrostatic actuators. Int. J. Solids Struct. 2012, 49, 3816–3822. [Google Scholar] [CrossRef] [Green Version]
- Schomburg, W.K.; Reinertz, O.; Sackmann, J.; Schmitz, K. Equations for the approximate calculation of forces between cuboid magnets. J. Magn. Magn. Mater. 2020, 506, 166694. [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Ostrovskii, V.Y.; Tutueva, A.V.; Rybin, V.G.; Karimov, A.I.; Butusov, D.N. Continuation analysis of memristor-based modified Chua’s circuit. In Proceedings of the 2020 International Conference Nonlinearity, Information and Robotics (NIR), Innopolis, Russia, 3–6 December 2020; pp. 1–5. [Google Scholar]
- Karimov, T.I.; Druzhina, O.S.; Karimov, A.I.; Kolev, G.Y.; Butusov, D.N. Comparison of Bifurcation Diagrams for Numerical and Analog Chaotic Systems. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), Moscow, Russia, 26–29 January 2021; pp. 124–128. [Google Scholar]
- Karimov, A.; Rybin, V.; Kopets, E.; Karimov, T.; Nepomuceno, E.; Butusov, D. Identifying empirical equations of chaotic circuit from data. Nonlinear Dyn. 2022, 1–16. [Google Scholar] [CrossRef]
- Minati, L.; Gambuzza, L.; Thio, W.; Sprott, J.; Frasca, M. A chaotic circuit based on a physical memristor. Chaos Solitons Fractals 2020, 138, 109990. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Frequency of vibromotor rotation, f | 64 | Hz |
| Radius of the vibration head, R | 2.9 | m |
| Height of the vibration head, H | 4.5 | m |
| Density of steel, | 7700 | kg/m |
| Mass of the carriage, m | 6.57 | kg |
| Dynamic friction force, | 0.03 | N |
| Static friction force, | 0.05 | N |
| Velocity tolerance, | 0.02 | m/s |
| Linear friction coefficient, | 0.01 | N s/m |
| Effective distance between magnets (7) and (8), | 2 | m |
| Force at close contact for magnets (7) and (8), | 4 | N |
| Distance between magnets at zero position, D | 0.0025 | m |
| Maximum force between magnets (5) | 0.5 | N |
| Width of the peak at half maximum, | 2 | m |
| Distance between peaks, | 2 | m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karimov, A.; Rybin, V.; Dautov, A.; Karimov, T.; Bobrova, Y.; Butusov, D. Mechanical Chaotic Duffing System with Magnetic Springs. Inventions 2023, 8, 19. https://doi.org/10.3390/inventions8010019
Karimov A, Rybin V, Dautov A, Karimov T, Bobrova Y, Butusov D. Mechanical Chaotic Duffing System with Magnetic Springs. Inventions. 2023; 8(1):19. https://doi.org/10.3390/inventions8010019
Chicago/Turabian StyleKarimov, Artur, Vyacheslav Rybin, Albert Dautov, Timur Karimov, Yulia Bobrova, and Denis Butusov. 2023. "Mechanical Chaotic Duffing System with Magnetic Springs" Inventions 8, no. 1: 19. https://doi.org/10.3390/inventions8010019
APA StyleKarimov, A., Rybin, V., Dautov, A., Karimov, T., Bobrova, Y., & Butusov, D. (2023). Mechanical Chaotic Duffing System with Magnetic Springs. Inventions, 8(1), 19. https://doi.org/10.3390/inventions8010019