
Testing Scale Models of Hydro-Reactor Profiled Ducts That Create Notable Net Head to Promote Hydroelectric Power from Currents



Abstract
:1. Introduction
2. Materials and Methods
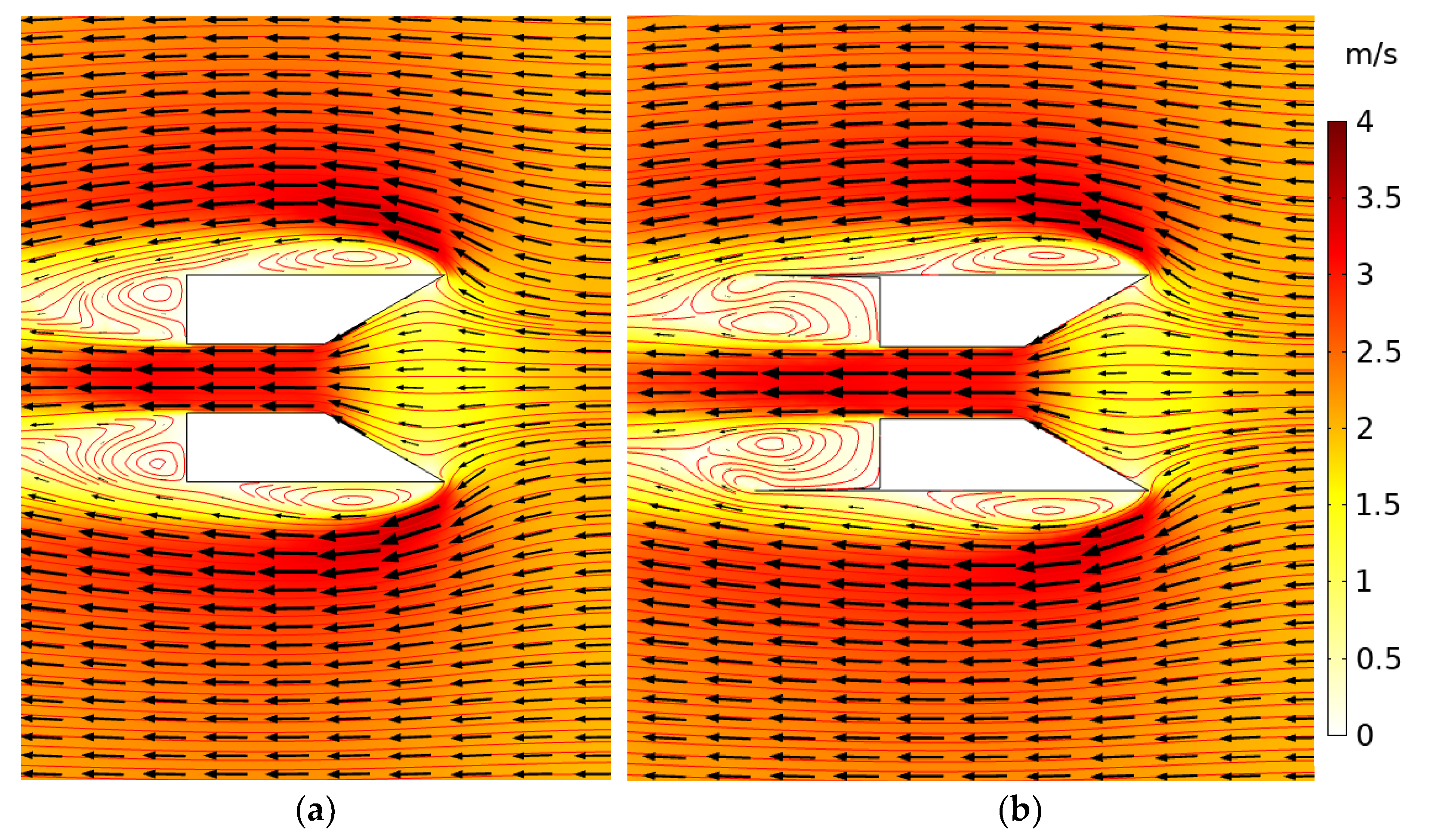
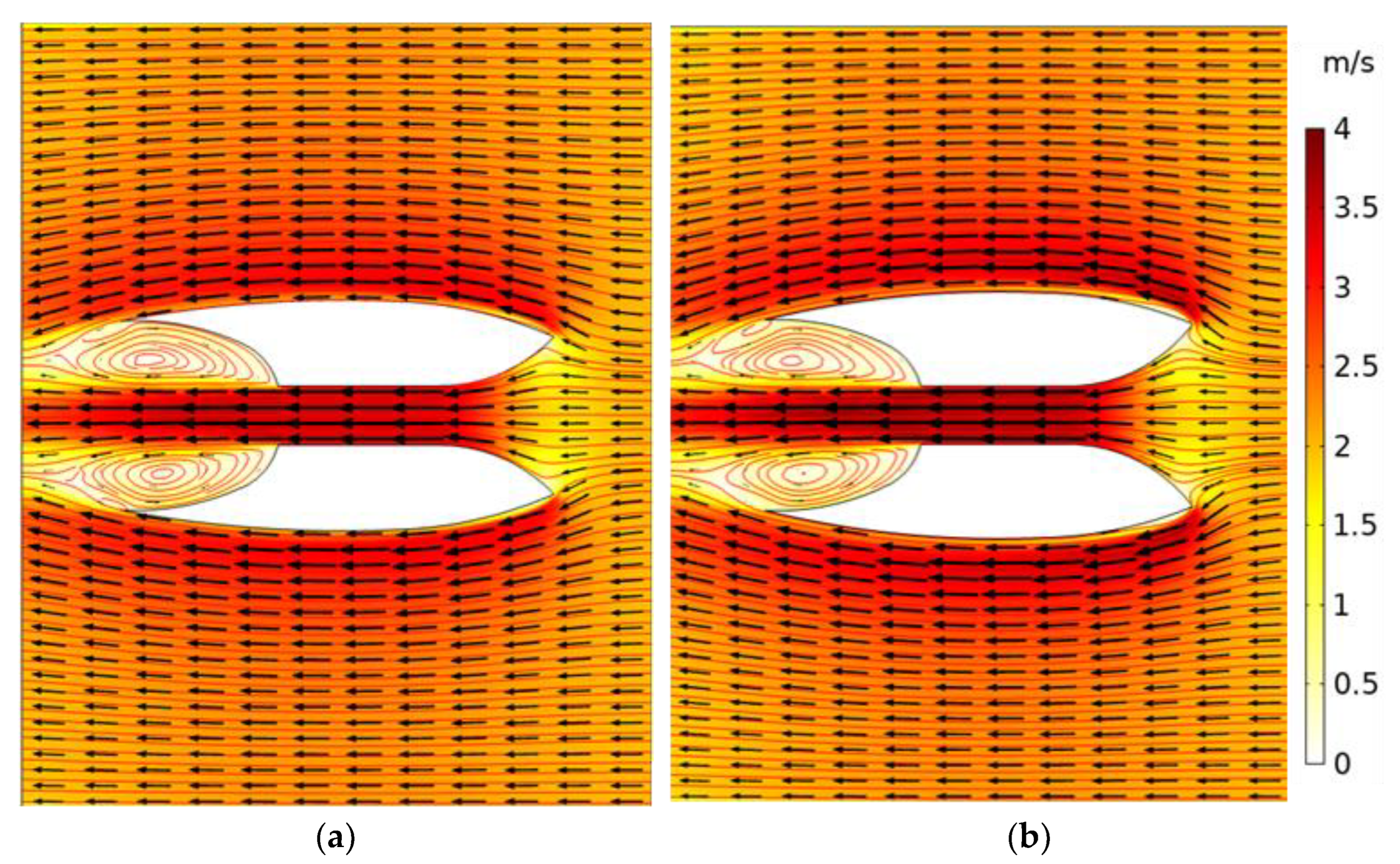
2.1. Fluid Dynamics Modelling
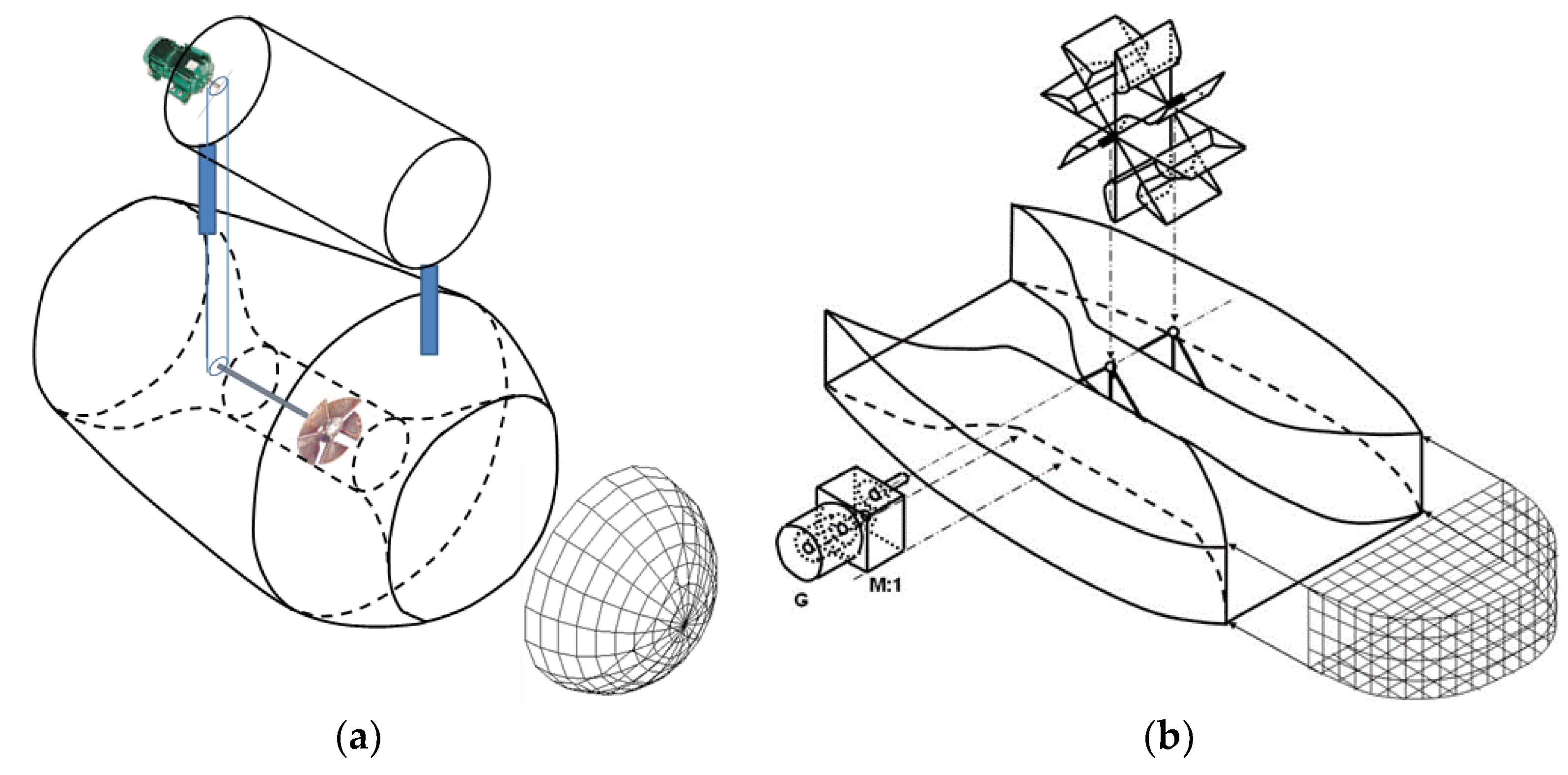
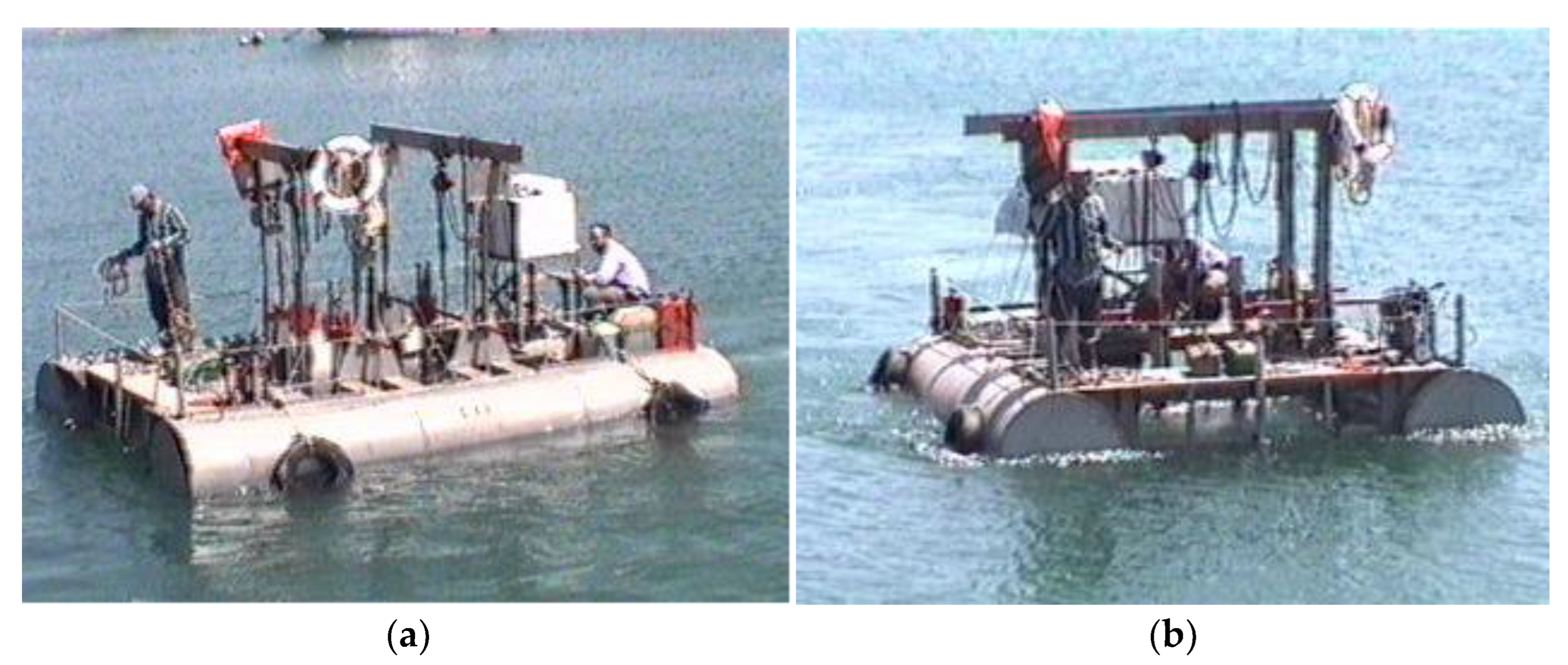
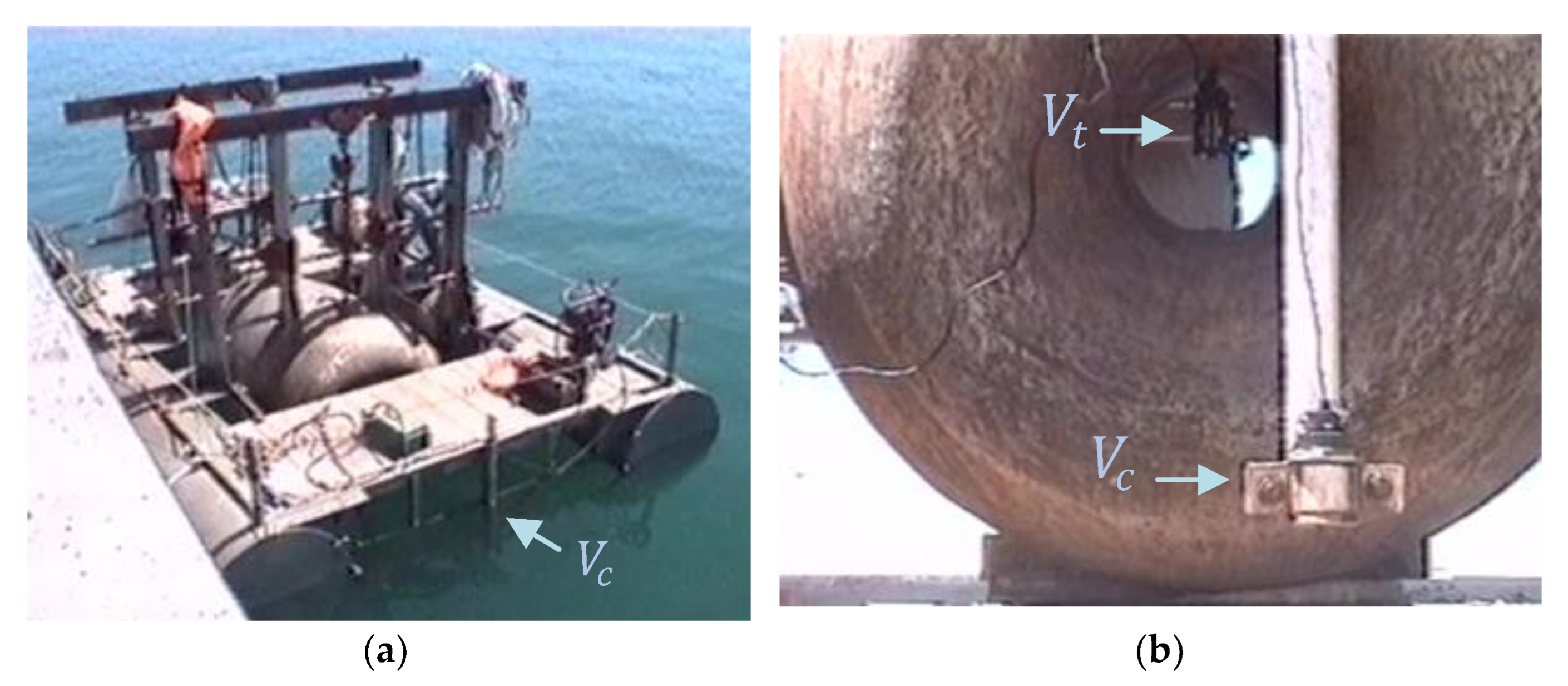
2.2. Methodology Used to Test Scale Models
3. Results
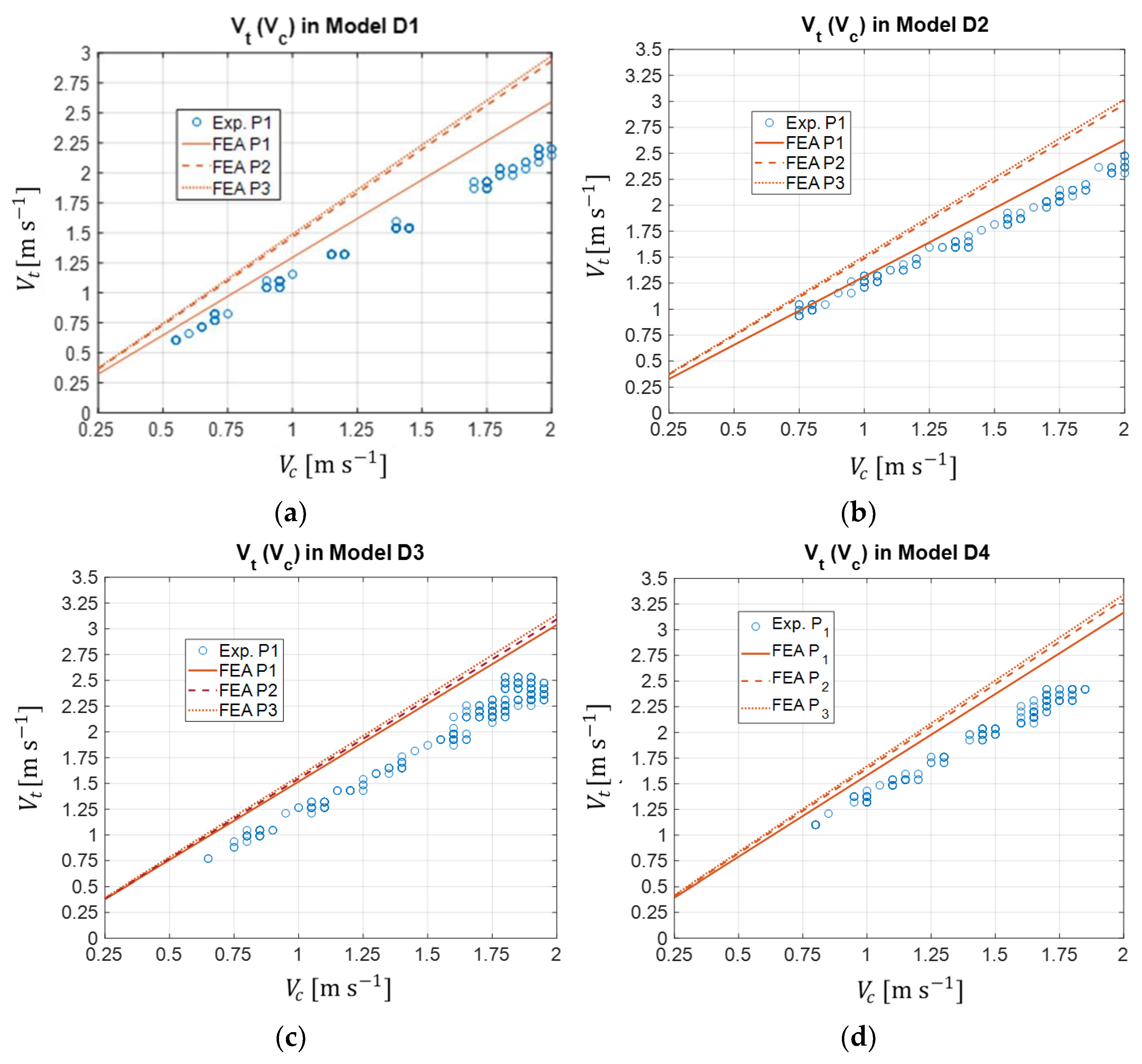
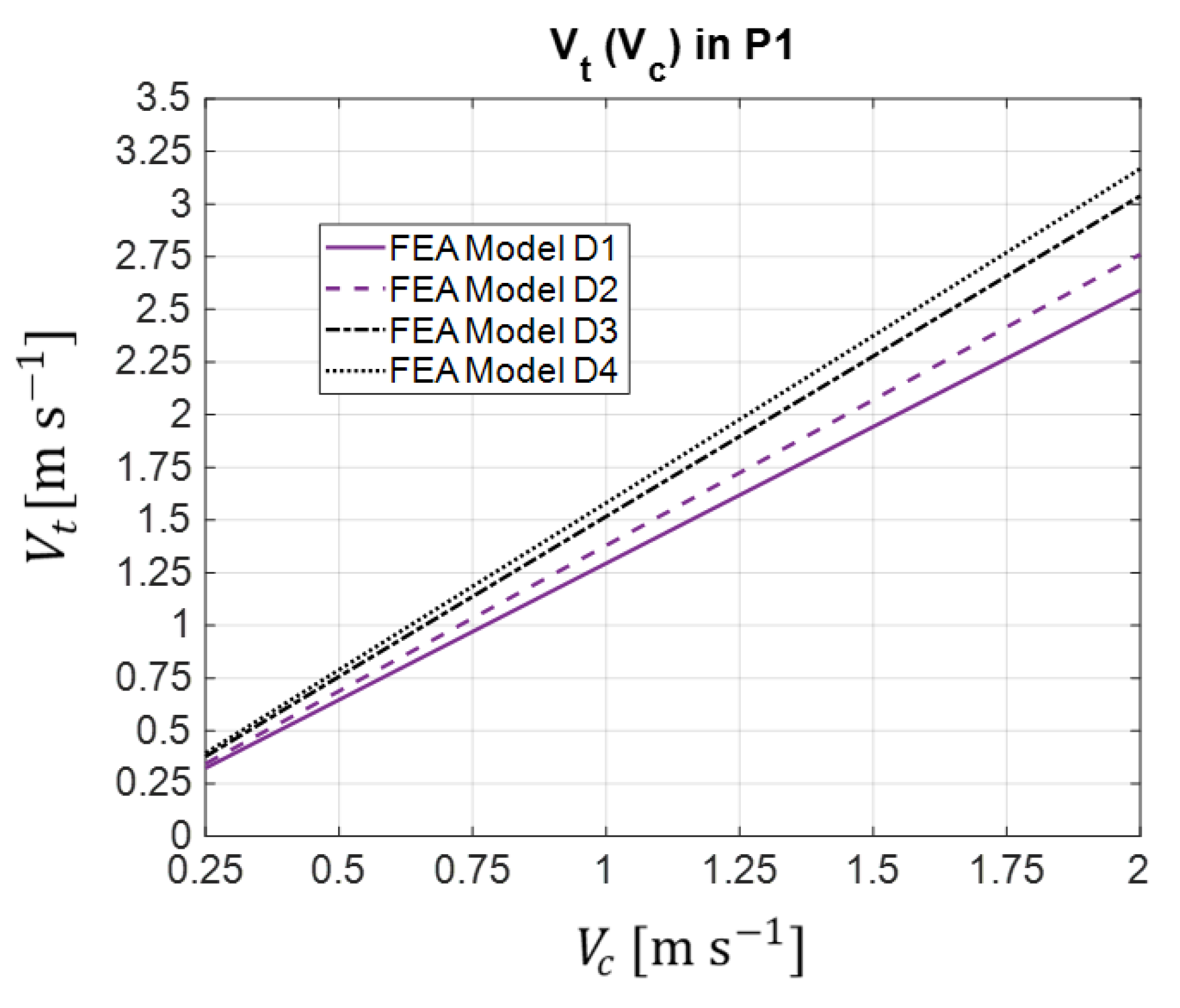
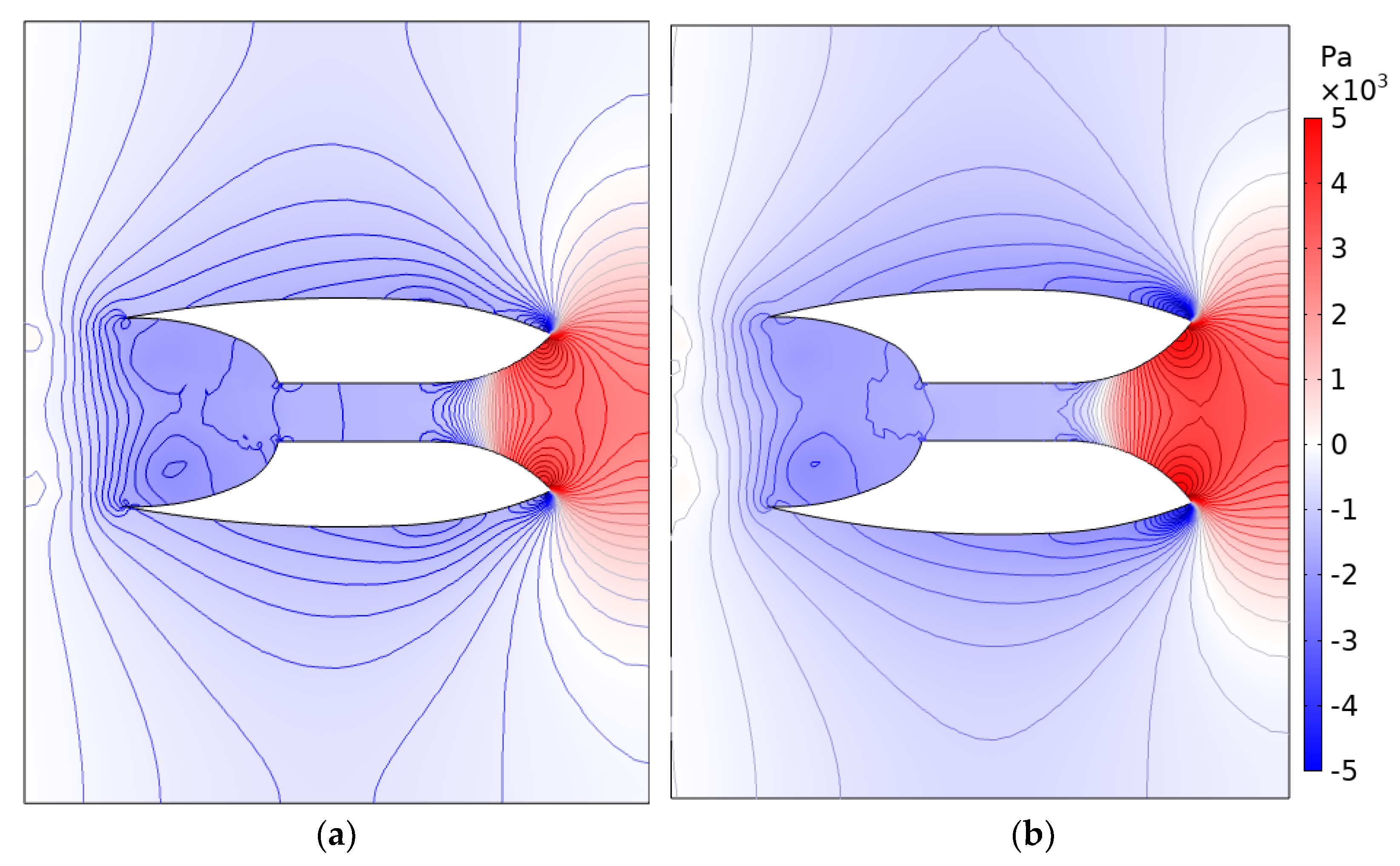
3.1. Results in the Free-Flow Condition
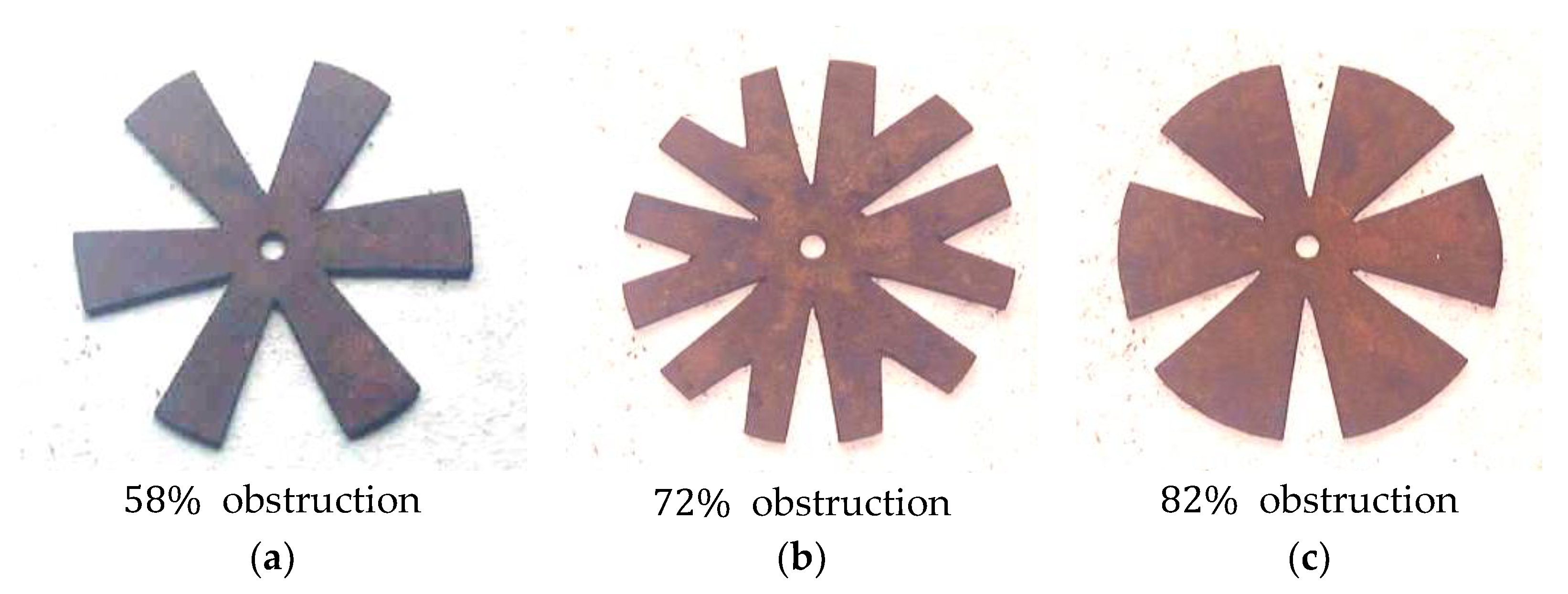
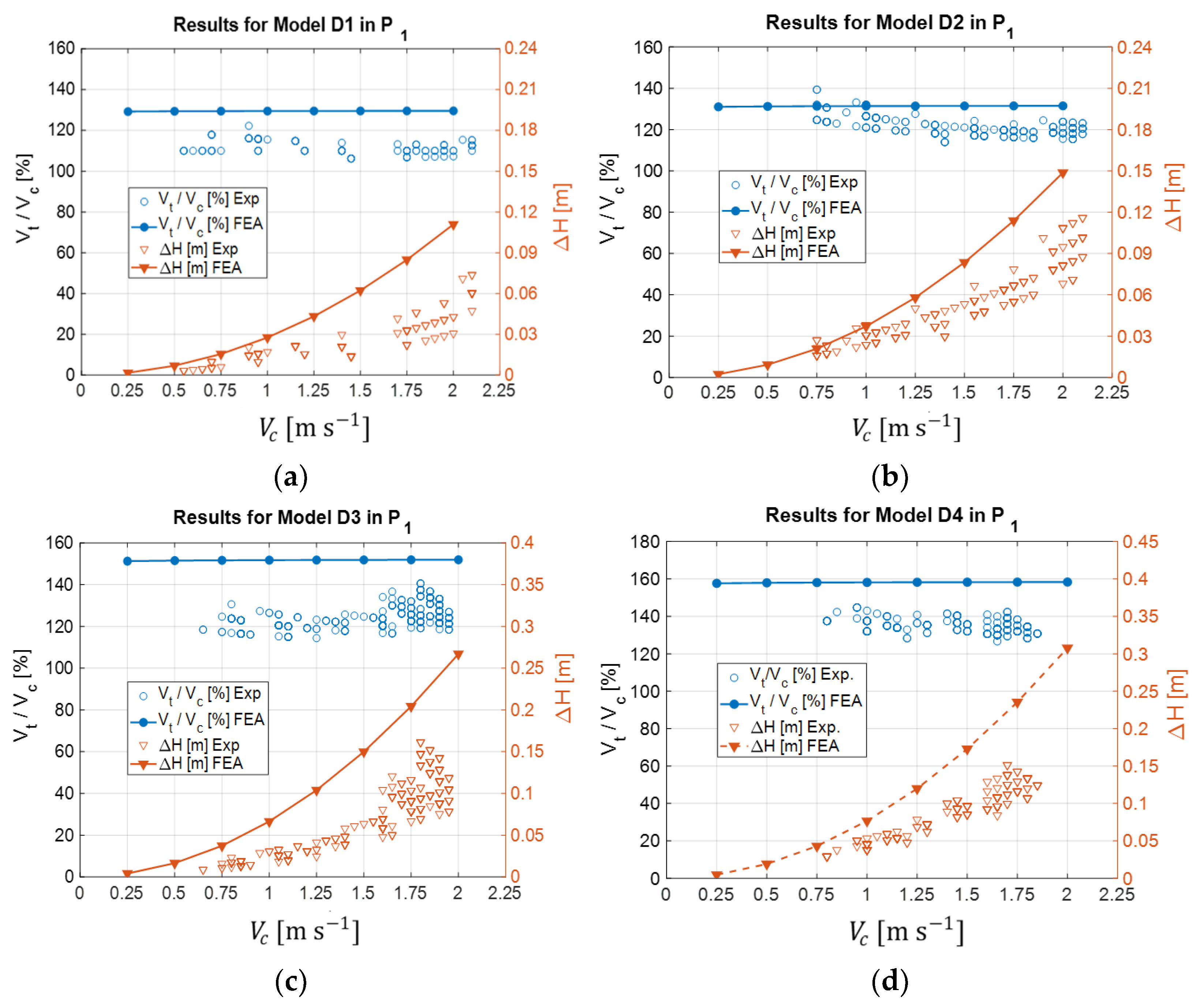
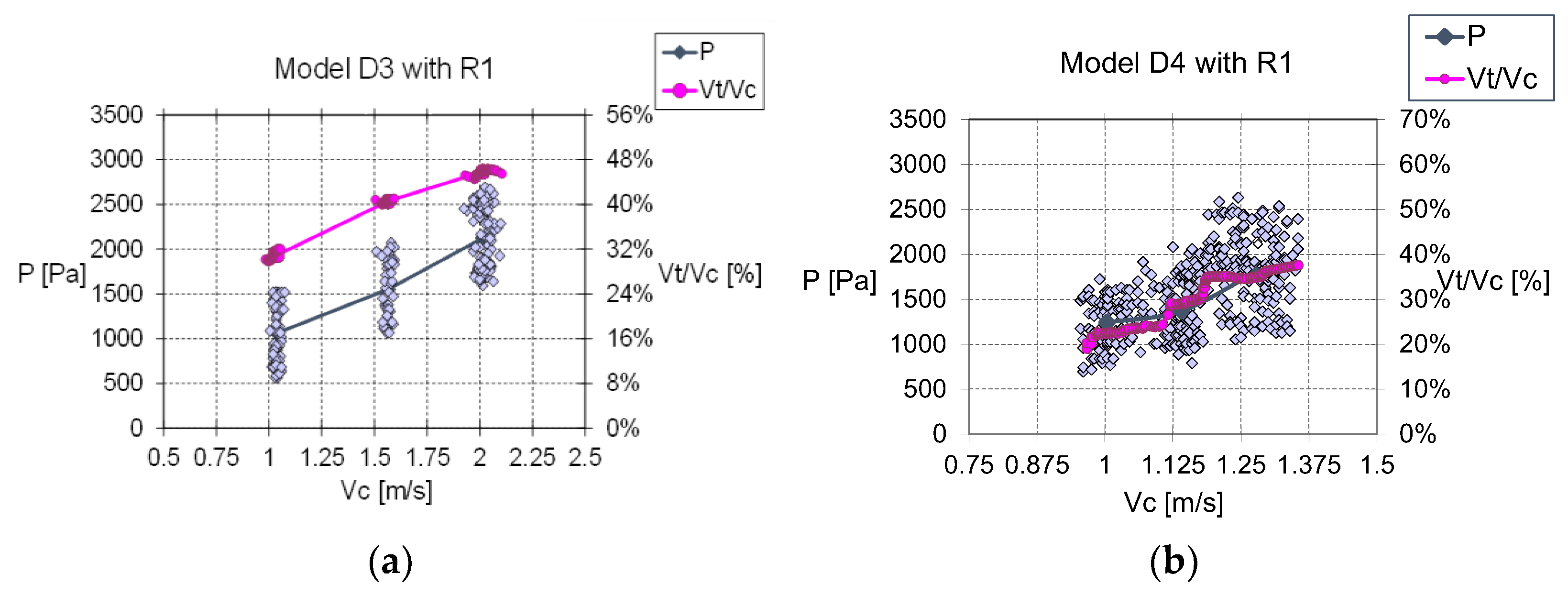
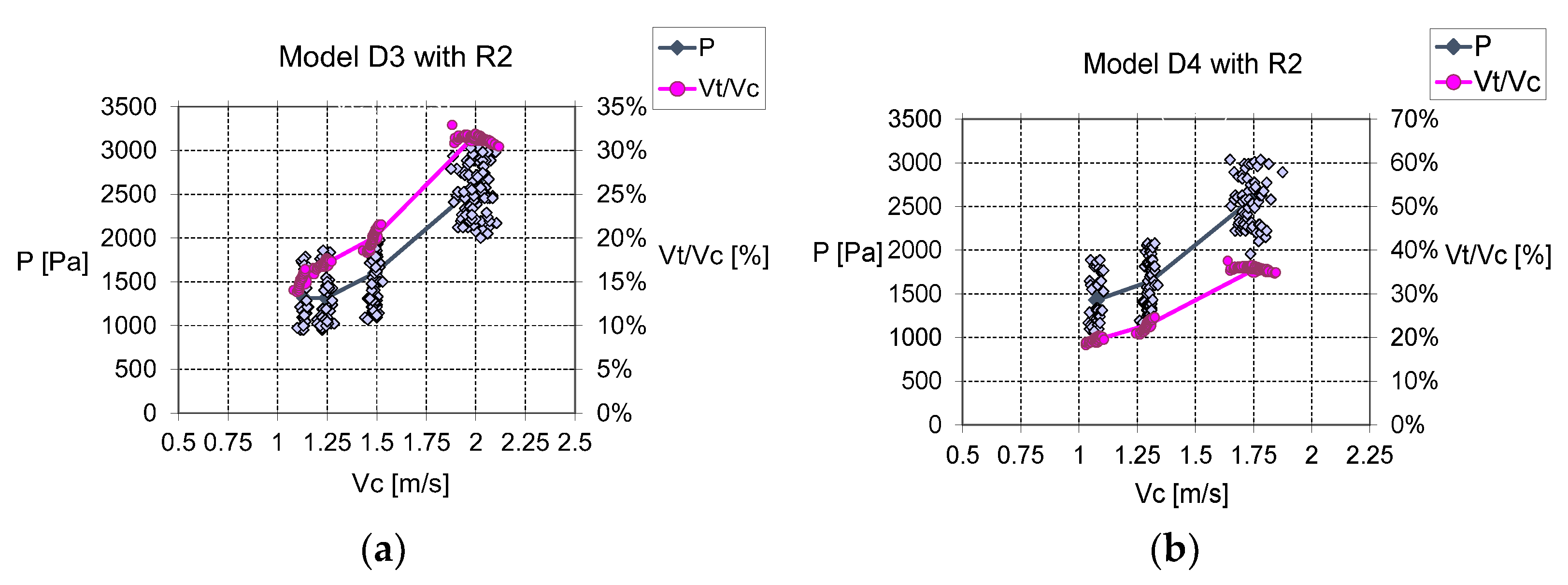
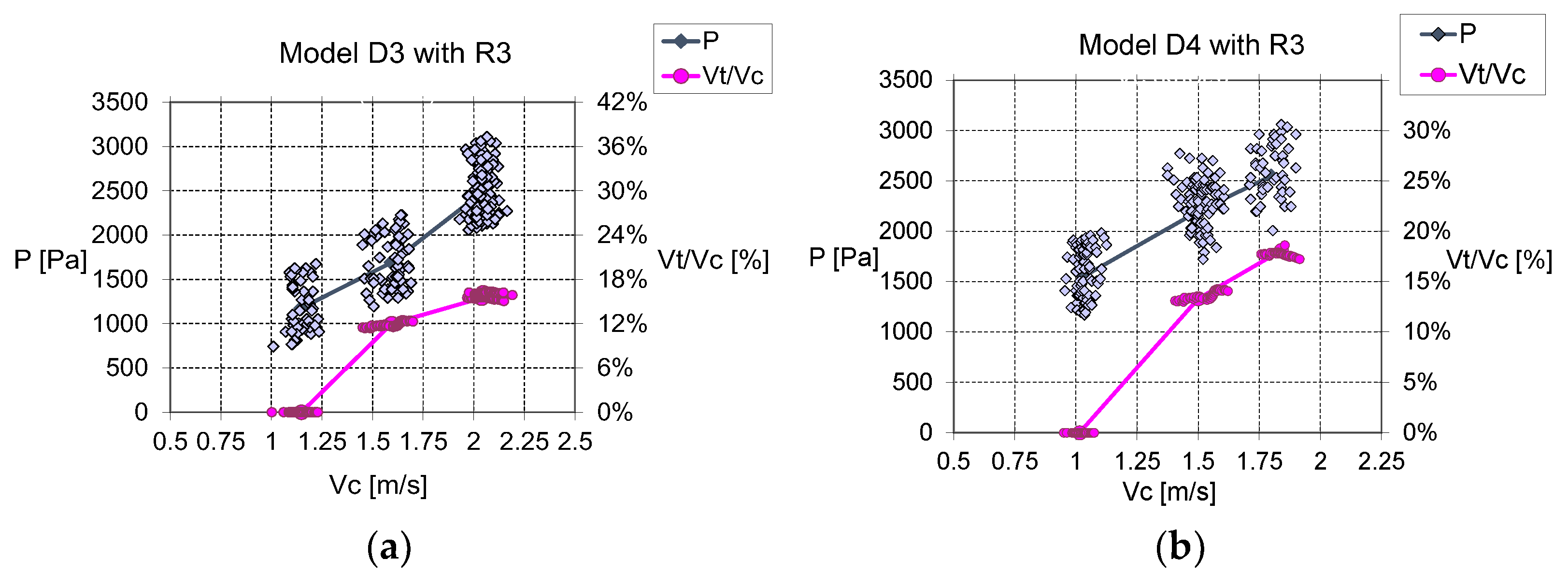
3.2. Results with Mechanical Resistances
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bowley, W.W. Underwater Power Generator. U.S. Patent 4,383,182A, 10 May 1983. [Google Scholar]
- Pitts, T.H. Submerged Ocean Current Electrical Generator and Method for Hydrogen Production. U.S. Patent 4,850,190A, 25 July 1989. [Google Scholar]
- Fraenkel, P.L. Hydraulic Speed-Increasing Transmission for Water Current Powered Turbine. U.S. Patent 7,530,224B2, 12 May 2009. [Google Scholar]
- Dehlsen, J.G.P. Floating Tower Frame for Ocean Current Turbine System. U.S. Patent 9,334,849B2, 10 May 2016. [Google Scholar]
- Dehlsen, J.G.P. Floating, Yawing Spar Current/Tidal Turbine. U.S. Patent 9,506,451B2, 29 November 2016. [Google Scholar]
- Laín, S.; Contreras, L.T.; López, O.D. Hydrodynamic Characterisation of a Garman-Type Hydrokinetic Turbine. Fluids 2021, 6, 186. [Google Scholar] [CrossRef]
- Haining, M.L. Ocean Current Power Generator. U.S. Patent 5,440,176A, 8 August 1995. [Google Scholar]
- Ramsey, D.A. Suction-Augmented Hydropower Turbine. U.S. Patent 9,097,233B1, 4 August 2005. [Google Scholar]
- Guinard, P. Turbine Device for Generating Electricity from Ocean Currents. U.S. Patent D748,576S1, 2 February 2016. [Google Scholar]
- Stothers, R.; Grillos, E. Flow Enhancement for Underwater Turbine. U.S. Patent 7,874,788 B2, 25 January 2011. [Google Scholar]
- Kehr, Y.-Z. Ocean Current Power Generating Apparatus Using Dual-Duct with Boundary Layer Control Effect. U.S. Patent 9,488,155 B2, 8 November 2016. [Google Scholar]
- Sireli, E.M.; Platon, M.C.; Raychev, M.A. Unidirectional Hydro Turbine with Enhanced Duct, Blades and Generator. U.S. Patent 9,000,604B2, 7 April 2015. [Google Scholar]
- Davis, B.V.; Grillos, E.; Allison, S. Underwater Ducted Turbine. U.S. Patent 2,009,0243,300A1, 1 October 2009. [Google Scholar]
- Picanço, H.P.; Kleber Ferreira de Lima, A.; Dias do Rio Vaz DA, T.; Lins, E.F.; Pinheiro Vaz, J.R. Cavitation Inception on Hydrokinetic Turbine Blades Shrouded by Diffuser. Sustainability 2022, 14, 7067. [Google Scholar] [CrossRef]
- Zahedi Nejad, A.; Rad, M.; Khayat, M. Conceptual duct shape design for horizontal-axis hydrokinetic turbines. Sci. Iran. Trans. B Mech. Eng. 2016, 23, 2113–2124. [Google Scholar] [CrossRef]
- Kumar, D.; Sarkar, S. Numerical investigation of hydraulic load and stress induced in Savonius hydrokinetic turbine with the effects of augmentation techniques through fluid-structure interaction analysis. Energy 2016, 116, 609–618. [Google Scholar] [CrossRef]
- Mosbahi, M.; Ayadi, A.; Chouaibi, Y.; Driss, Z.; Tucciarelli, T. Performance study of a Helical Savonius hydrokinetic turbine with a new deflector system design. Energy Convers. Manag. 2019, 194, 55–74. [Google Scholar] [CrossRef]
- Nag, A.K.; ·Sarkar, S. Experimental and numerical study on the performance and flow pattern of different Savonius hydrokinetic turbines with varying duct angle. J. Ocean. Eng. Mar. Energy 2019, 6, 31–53. [Google Scholar] [CrossRef]
- Tunio, I.A.; Shah, M.A.; Hussain, T.; Harijan, K.; Mirjat, N.H.; Memon, A.H. Investigation of duct augmented system effect on the overall performance of straight blade Darrieus hydrokinetic turbine. Renew. Energy 2020, 153, 143–154. [Google Scholar] [CrossRef]
- Kirke, B.K. Tests on ducted and bare helical and straight blade Darrieus hydrokinetic turbines. Renew. Energy 2011, 36, 3013–3022. [Google Scholar] [CrossRef]
- Arsénio, A.J. Hidroreactor Destinado ao Aproveitamento da Energia Cinética da Água em Locais onde as Correntes Sejam Significativas para Produção de Energia Elétrica. Portugal Patent No. 102,088, 12 December 1997. [Google Scholar]
- Arsénio, A.J. Run-of-River Submerged Water Turbine. European Patent No. 0924,426B1, 4 August 2004. [Google Scholar]
- Arsénio, A.J. Hydroreactor to Take Advantage of the Kinetic Energy from the Water in Places Where the Streams Are Meaningful for the Production Electric Power. U.S. Patent 6,013,955A, 11 January 2000. [Google Scholar]
- Arsénio, A.J. Catamaran with Profiled Floats Supporting a Low Head Water Wheel, Serving Also as Bridge. European Patent No. 1,731,757B1, 26 January 2011. [Google Scholar]
- Todeschini, G. Review of Tidal Lagoon Technology and Opportunities for Integration within the UK Energy System. Inventions 2017, 2, 14. [Google Scholar] [CrossRef]
- Spurk, J.H.; Aksel, N. Fluid Mechanics, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 978-3-540-73536-6. [Google Scholar]
- Munson, B.R.; Young, D.F.; Okiishi, T.H.; Huebsch, W.W. Fundamentals of Fluid Mechanics, 6th ed.; Wiley: Hoboken, NJ, USA, 2009; ISBN 978-0470-26284-9. [Google Scholar]
- Available online: https://www.engineeringtoolbox.com/water-density-specific-weight-d_595.html (accessed on 12 December 2022).
- Available online: https://www.engineeringtoolbox.com/absolute-dynamic-viscosity-water-d_575.html (accessed on 12 December 2022).
- De Bertodano, M.L.; Lahey, R.T.; Jones, C., Jr. Development of a k-ε Model for Bubbly Two-Phase Flow. Trans. Am. Soc. Mech. Eng. 1994, 116, 128–134. [Google Scholar] [CrossRef]
- António, J.; dos Santos Costa, A. Testing Scale Models of Hydroreactor Stream Accelerators—Experimental Results. In Proceedings of the 10th International Conference, Energy & Society, Lisbon, Portugal, 3–6 May 2004; ISBN ISBN 97288930000. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Duct Model | D4 | D3 | ||||||
|---|---|---|---|---|---|---|---|---|
| Resistance | Free-Flow | R1 | R2 | R3 | Free-Flow | R1 | R2 | R3 |
| 2.1 | 0.63 | 0.45 | 0.195 | 1.95 | 0.615 | 0.375 | 0.18 | |
| [%] | 140 | 42 | 30 | 13 | 130 | 41 | 25 | 12 |
| 0 | 1998 | 2053 | 2104 | 0 | 1603 | 1654 | 1705 | |
| - | 328 | 278 | 256 | - | 324 | 286 | 279 | |
| 0.110 | 0.110 | 0.105 | 0.102 | 0.079 | 0.068 | 0.063 | 0.061 | |
| 160 | 114.3 | 109.1 | 106 | 106.7 | 71.7 | 65.5 | 63.4 | |
| - | 30% | 27% | 26% | - | 49% | 46% | 47% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
dos Santos Costa, A.J.A.; dos Santos Costa, L.A. Testing Scale Models of Hydro-Reactor Profiled Ducts That Create Notable Net Head to Promote Hydroelectric Power from Currents. Inventions 2023, 8, 45. https://doi.org/10.3390/inventions8010045
dos Santos Costa AJA, dos Santos Costa LA. Testing Scale Models of Hydro-Reactor Profiled Ducts That Create Notable Net Head to Promote Hydroelectric Power from Currents. Inventions. 2023; 8(1):45. https://doi.org/10.3390/inventions8010045
Chicago/Turabian Styledos Santos Costa, António J. Arsénio, and Luís Arsénio dos Santos Costa. 2023. "Testing Scale Models of Hydro-Reactor Profiled Ducts That Create Notable Net Head to Promote Hydroelectric Power from Currents" Inventions 8, no. 1: 45. https://doi.org/10.3390/inventions8010045
APA Styledos Santos Costa, A. J. A., & dos Santos Costa, L. A. (2023). Testing Scale Models of Hydro-Reactor Profiled Ducts That Create Notable Net Head to Promote Hydroelectric Power from Currents. Inventions, 8(1), 45. https://doi.org/10.3390/inventions8010045