
CFD Investigation for Sonar Dome with Bulbous Bow Effect

Abstract
:1. Introduction
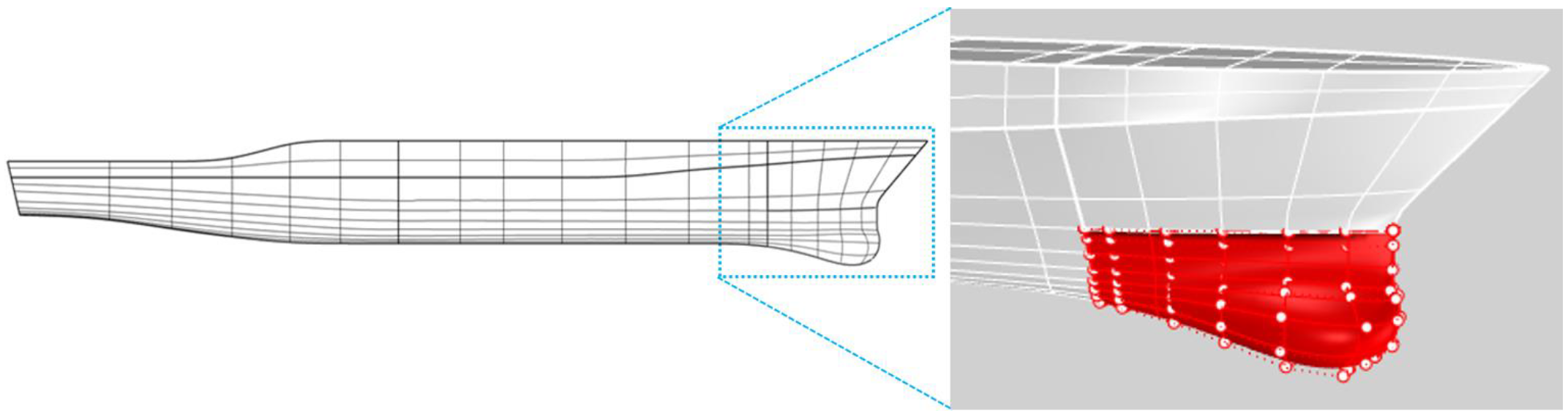
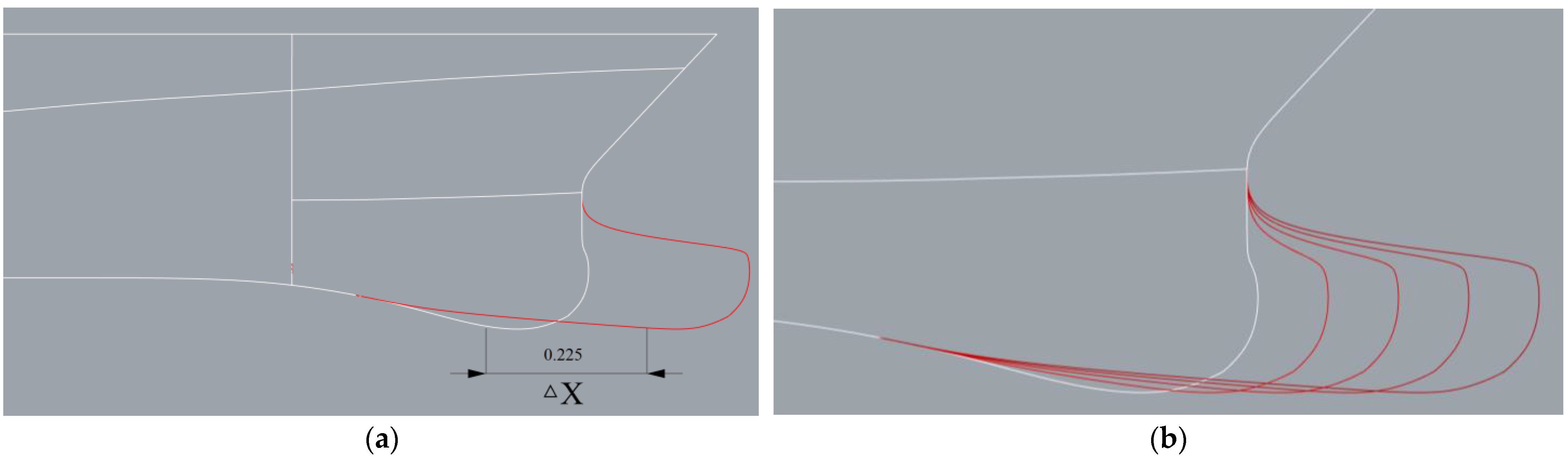
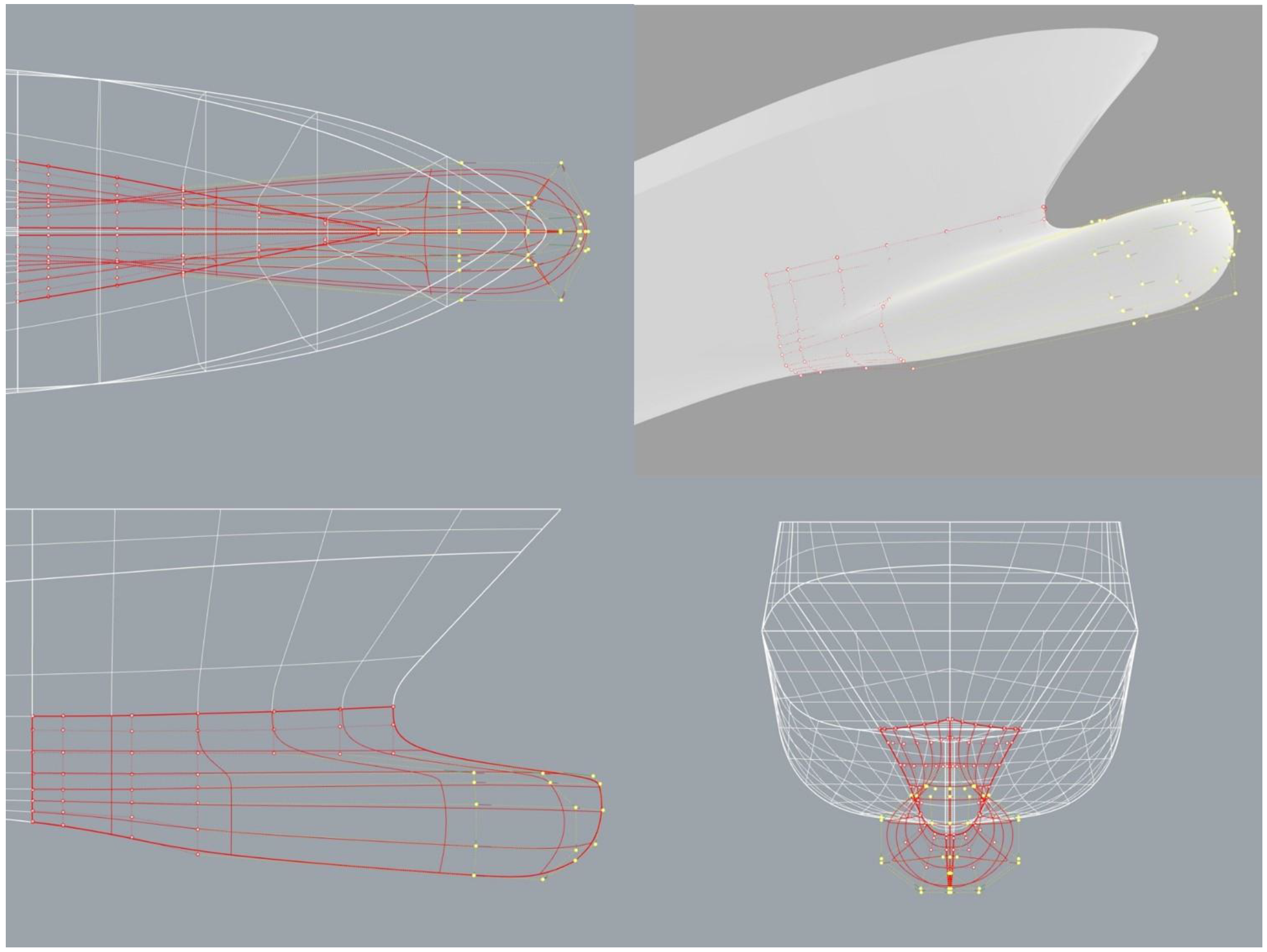
2. Geometry and Test Conditions
3. CFD Methods
3.1. Numerical Methods and Models
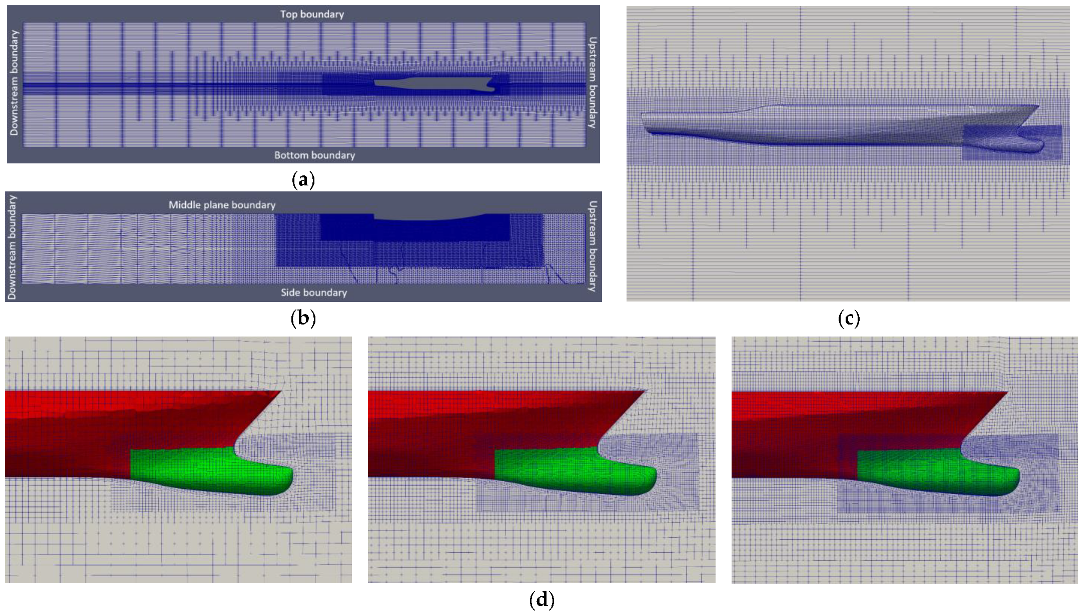
3.2. Computational Domain and Grid Topology
3.3. Verification and Validation (V&V) Method
3.3.1. Verification
3.3.2. Validation
3.4. Boundary Conditions
3.4.1. Upstream, Side, and Bottom Boundary
3.4.2. Top Boundary
3.4.3. Downstream Boundary
3.4.4. Solid Surface Boundary
4. Results
4.1. V&V Analysis
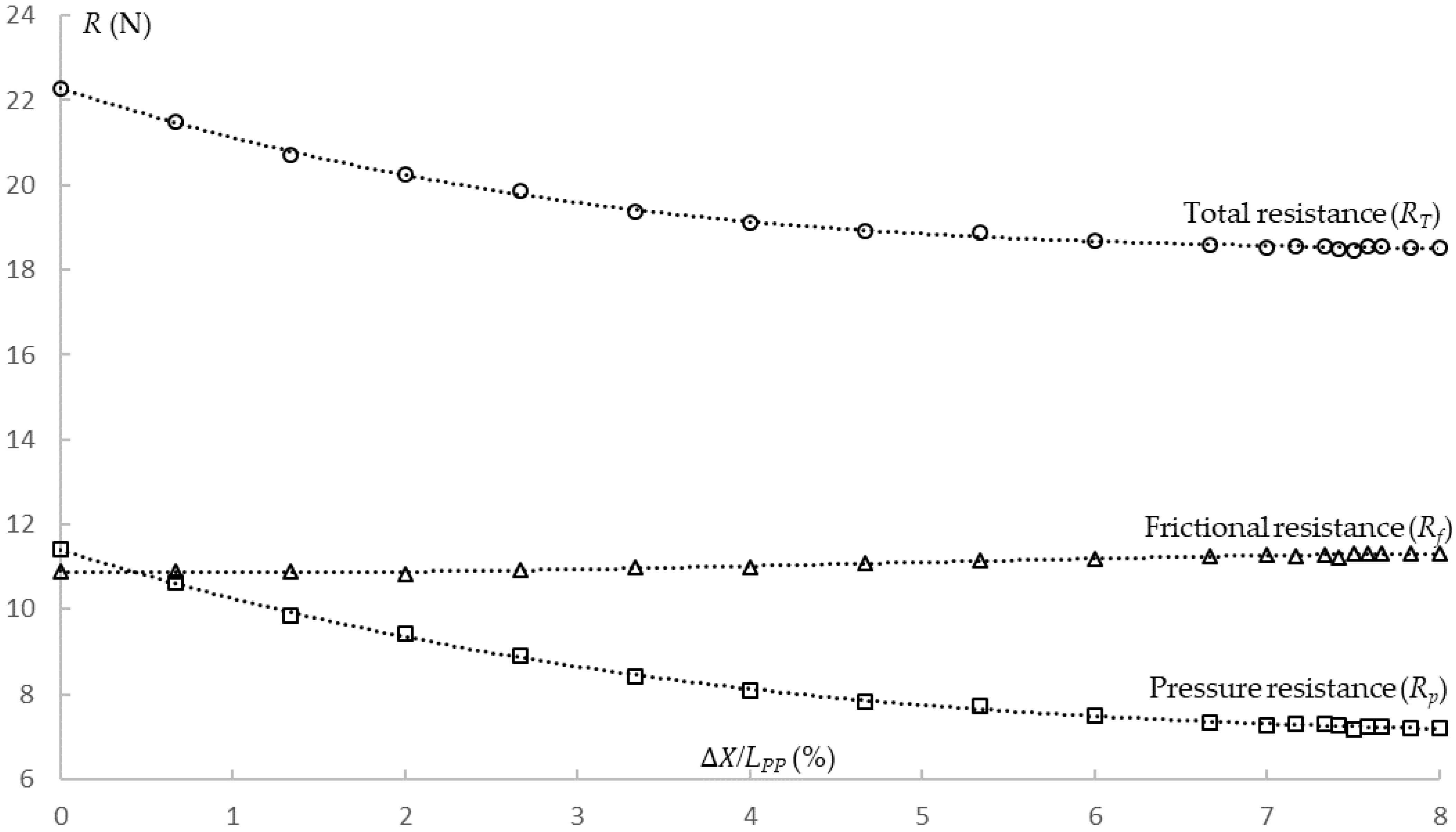
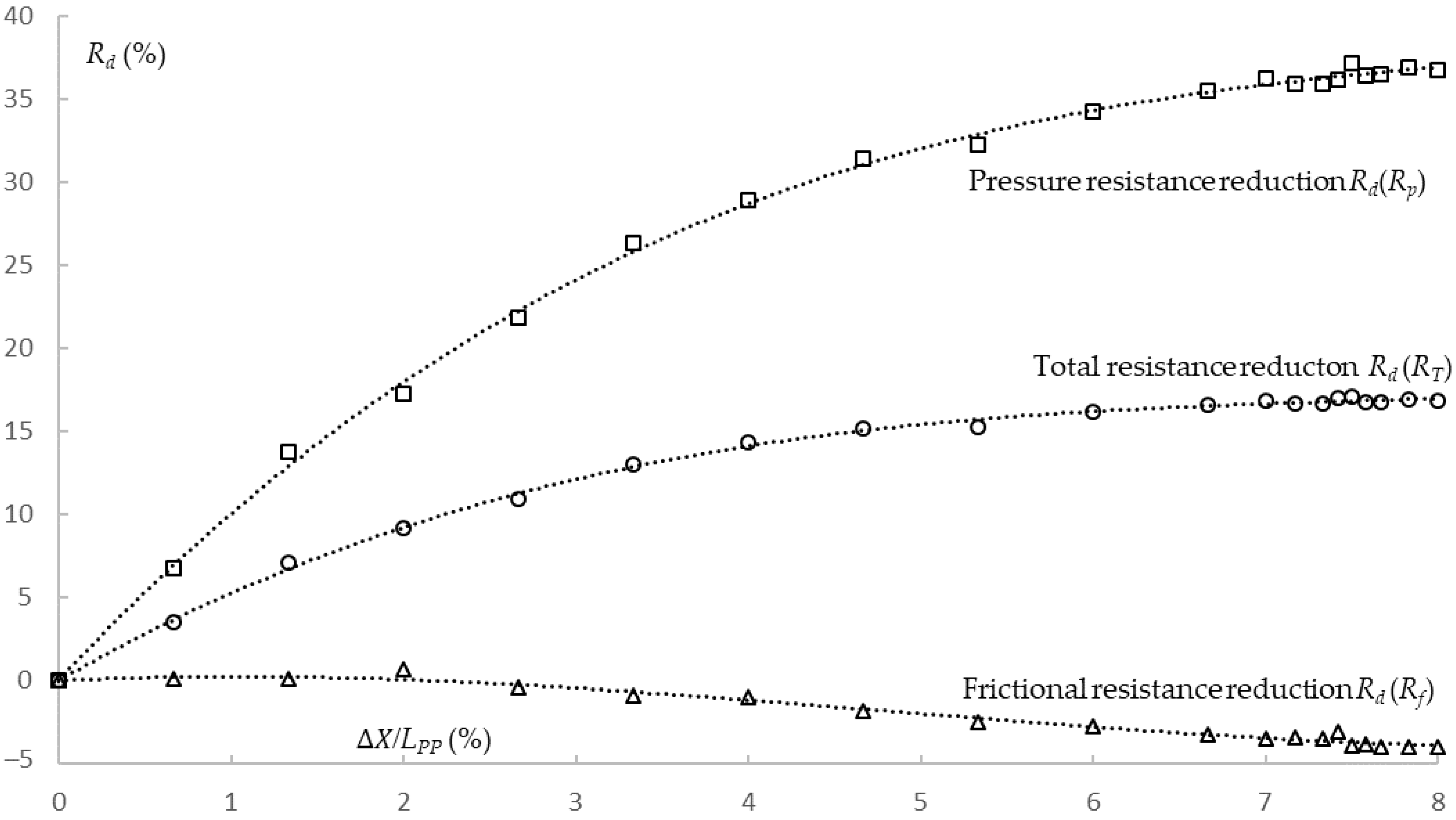
4.2. Resistance for Different Sonar Dome Length
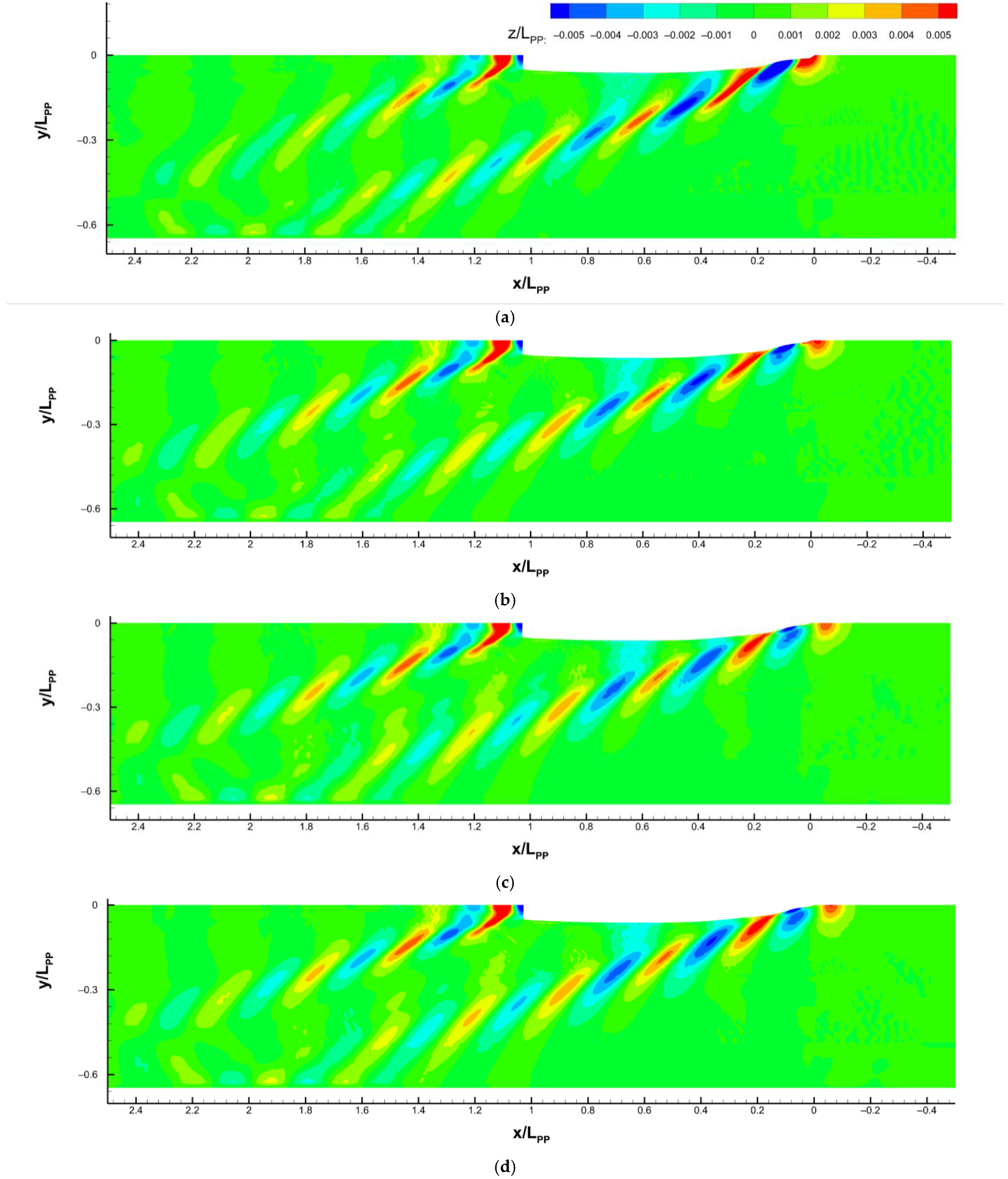
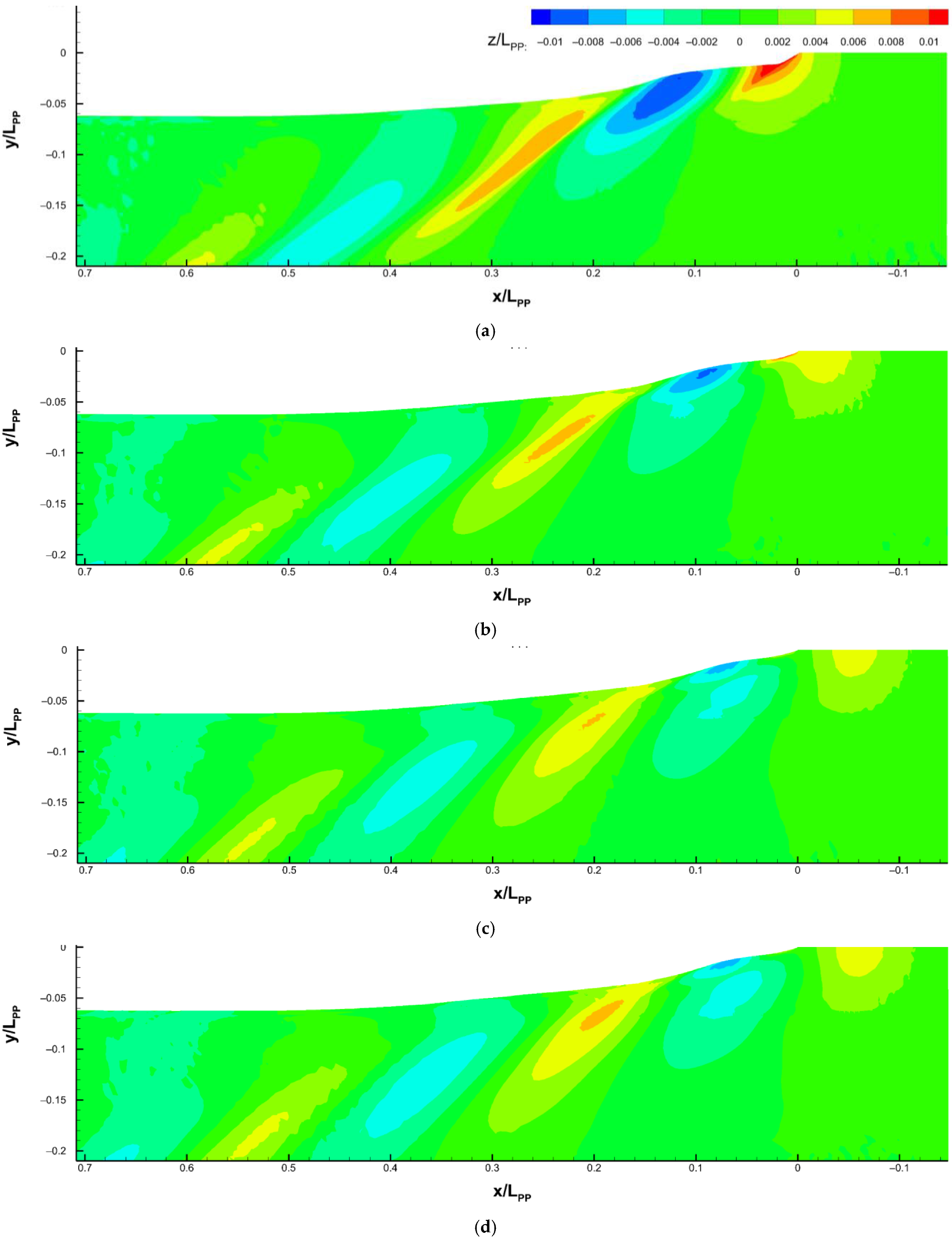
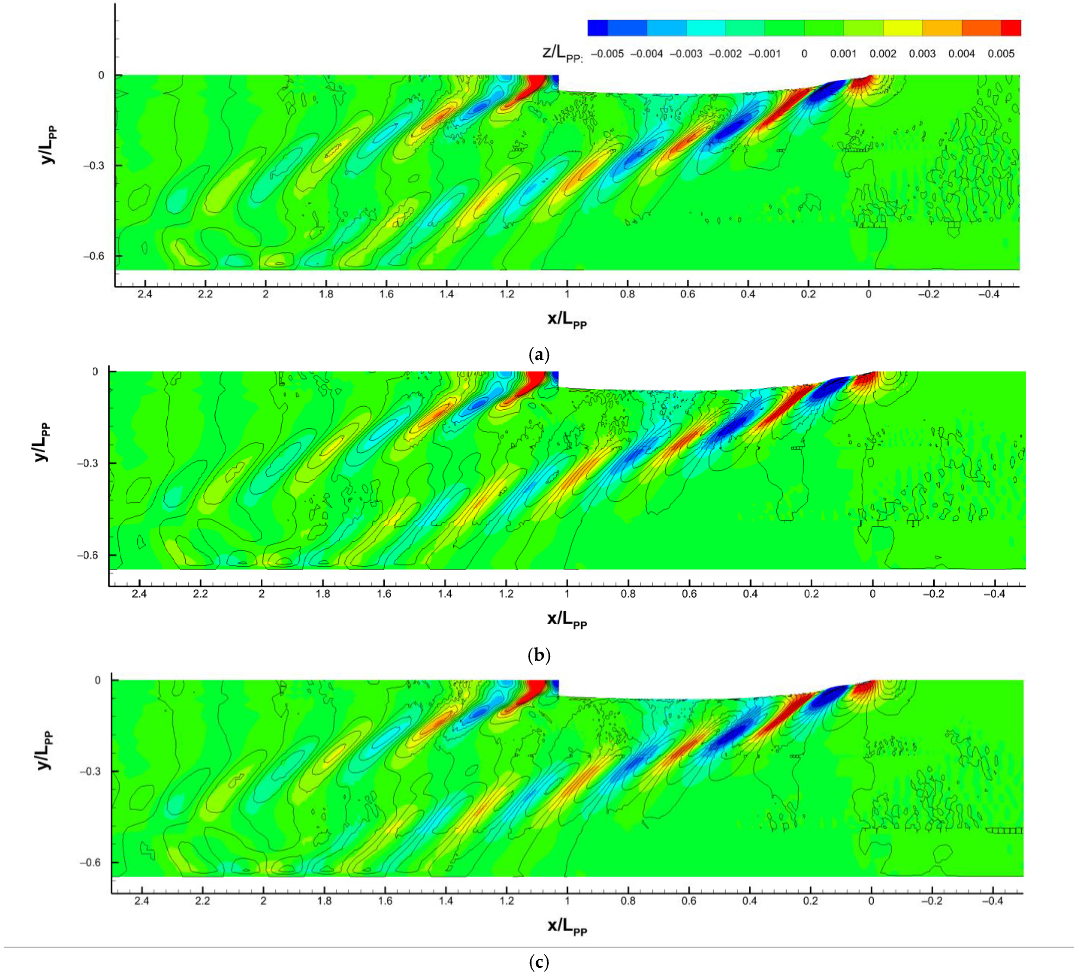
4.3. Ship-Making Wave Pattern
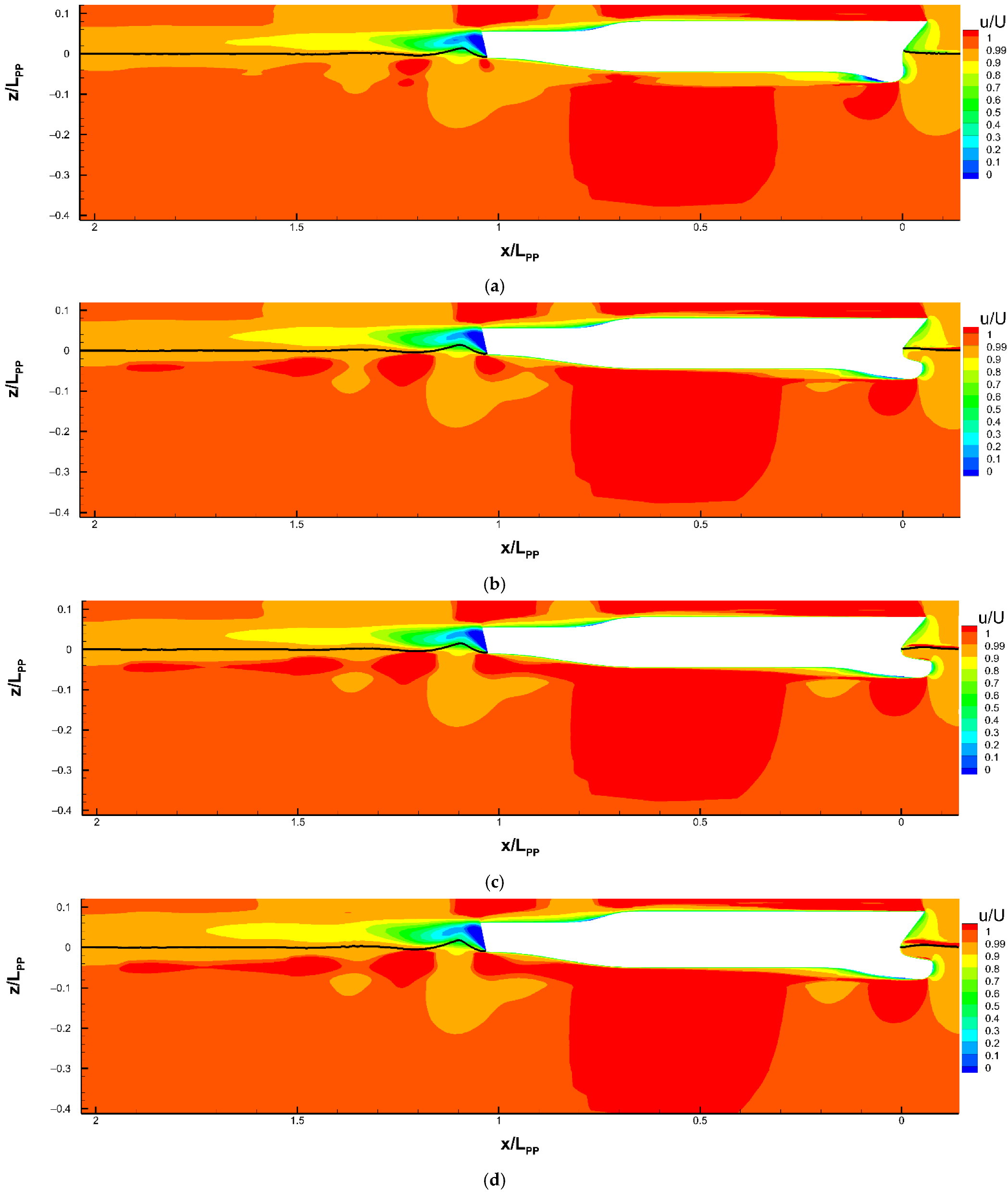
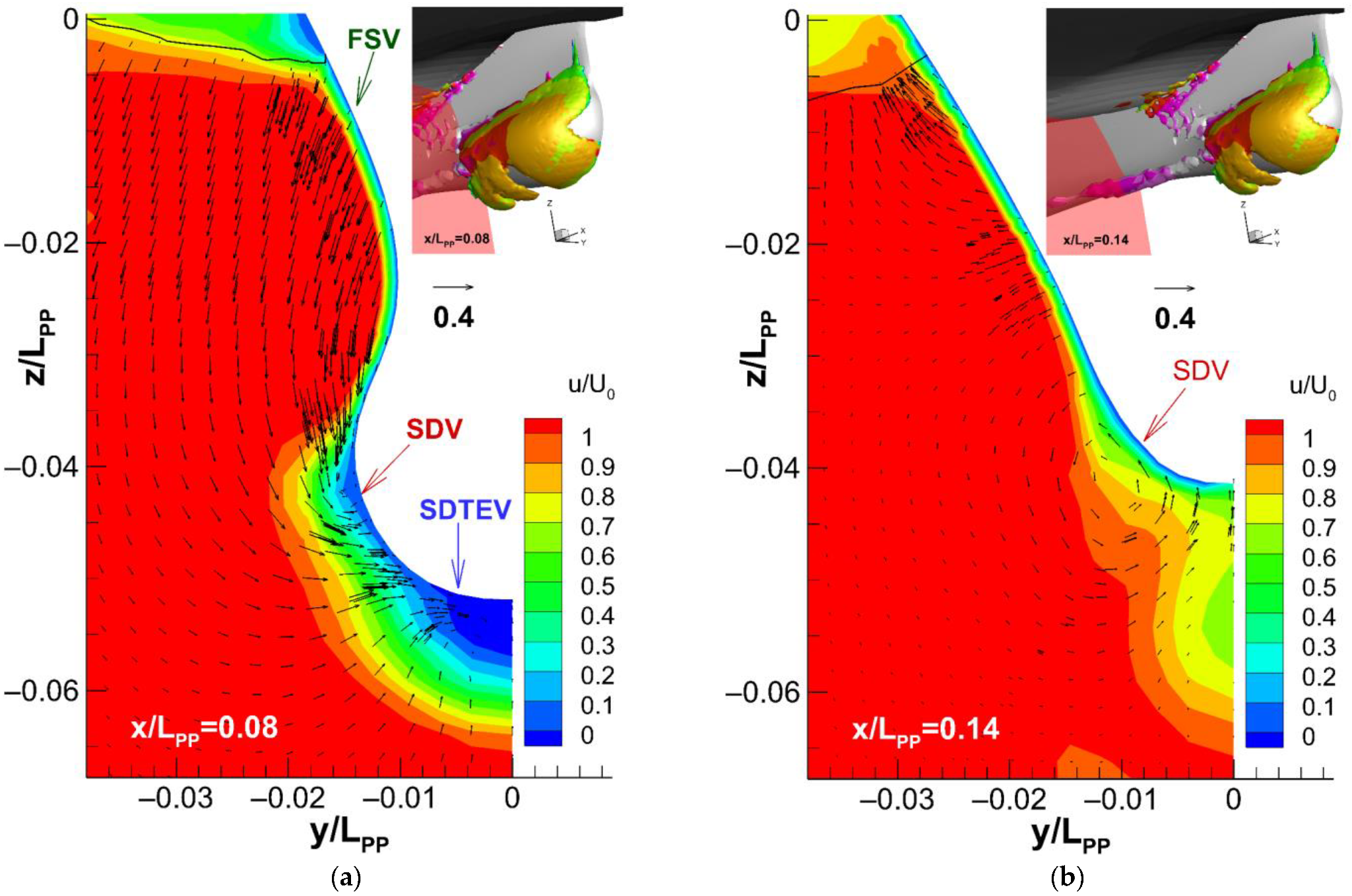
4.4. Velocity Field around Ship’s Hull and Sonar Dome
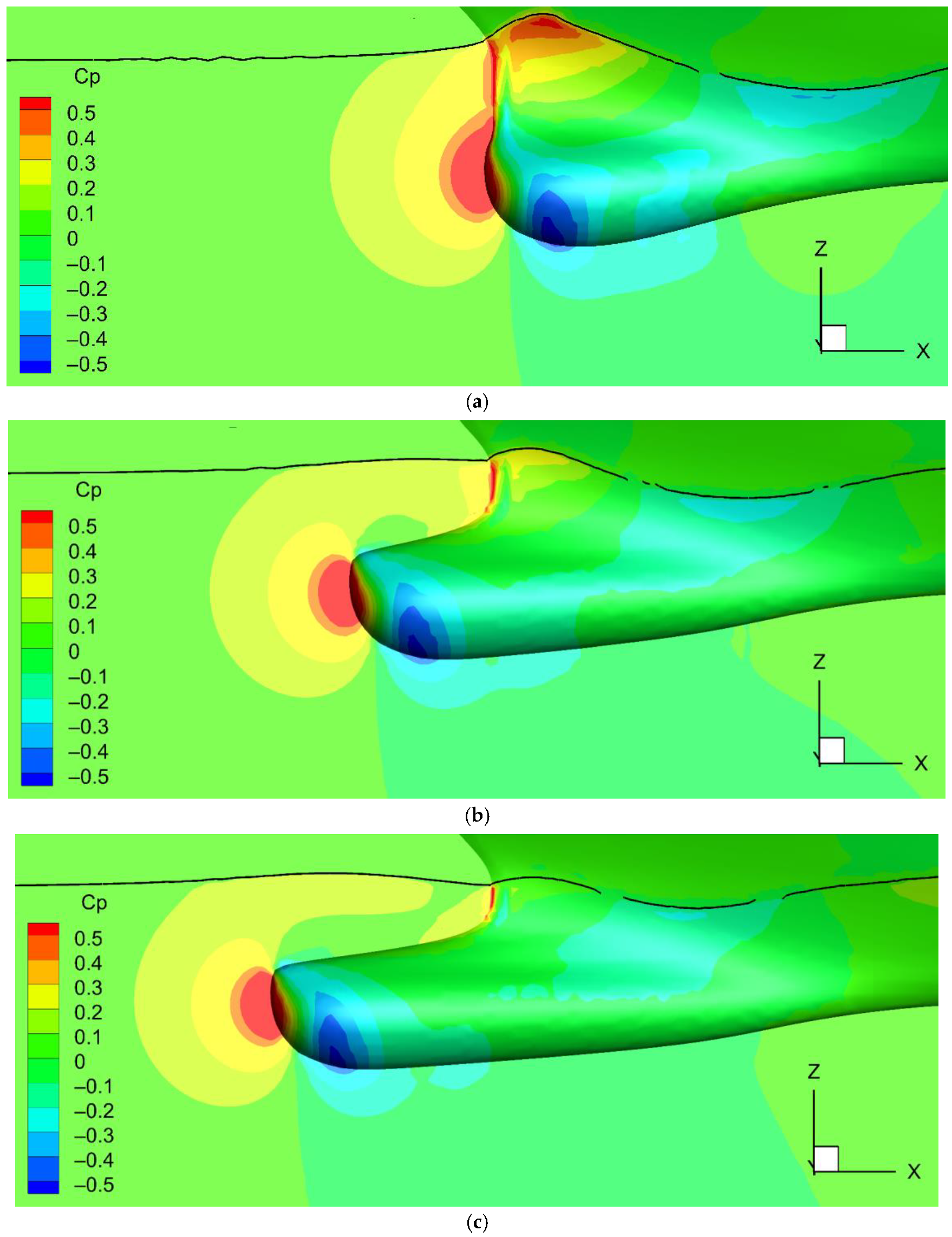
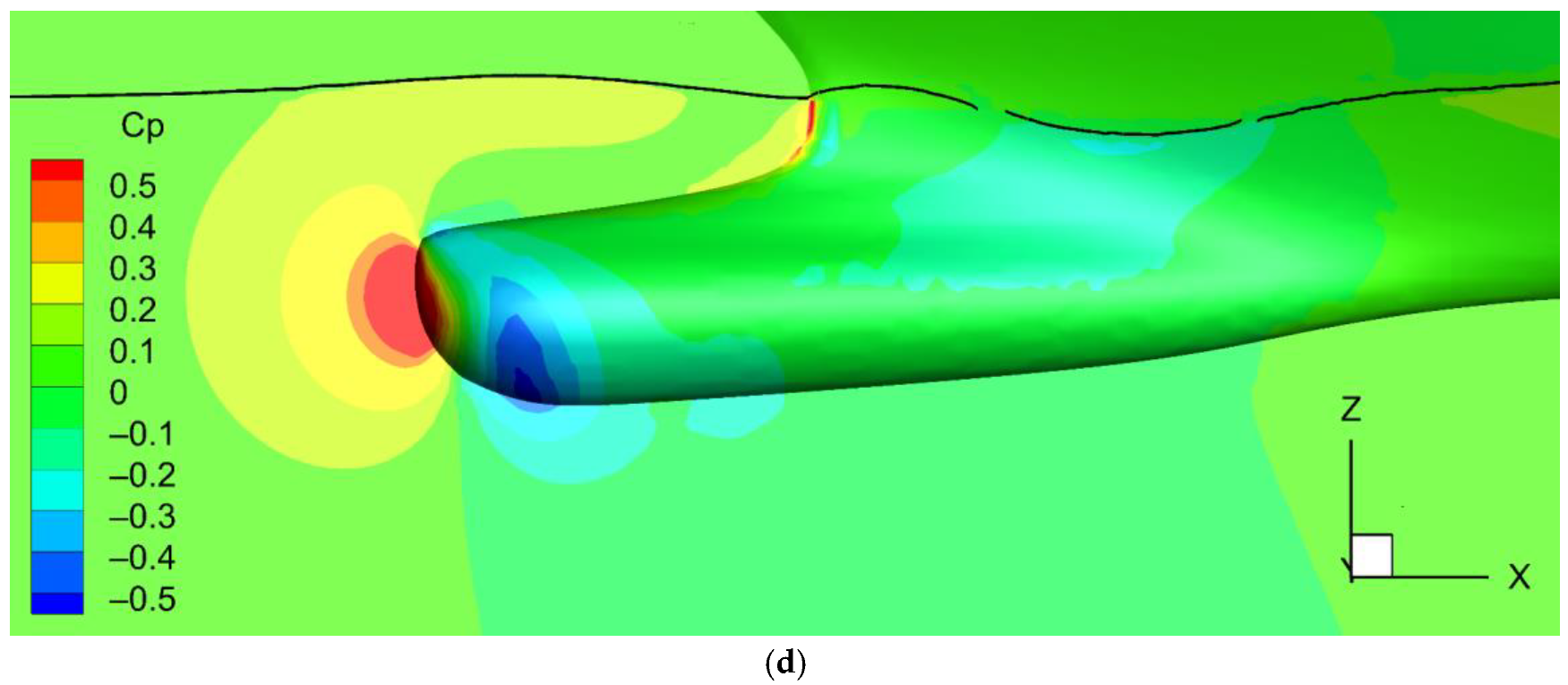
4.5. Pressure Distribution around Ship’s Bow
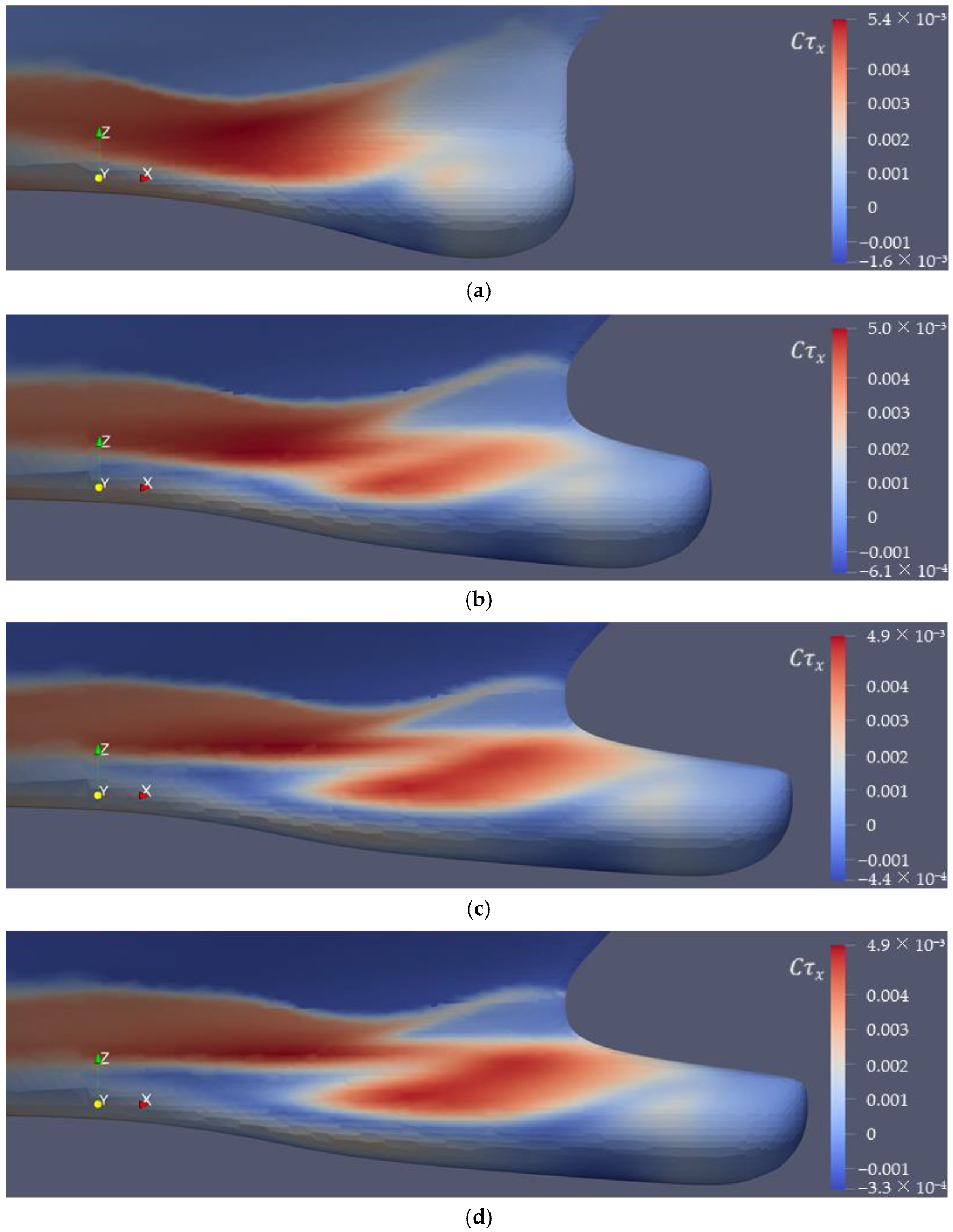
4.6. Distribution of Wall Shear Stress on Ship’s Bow
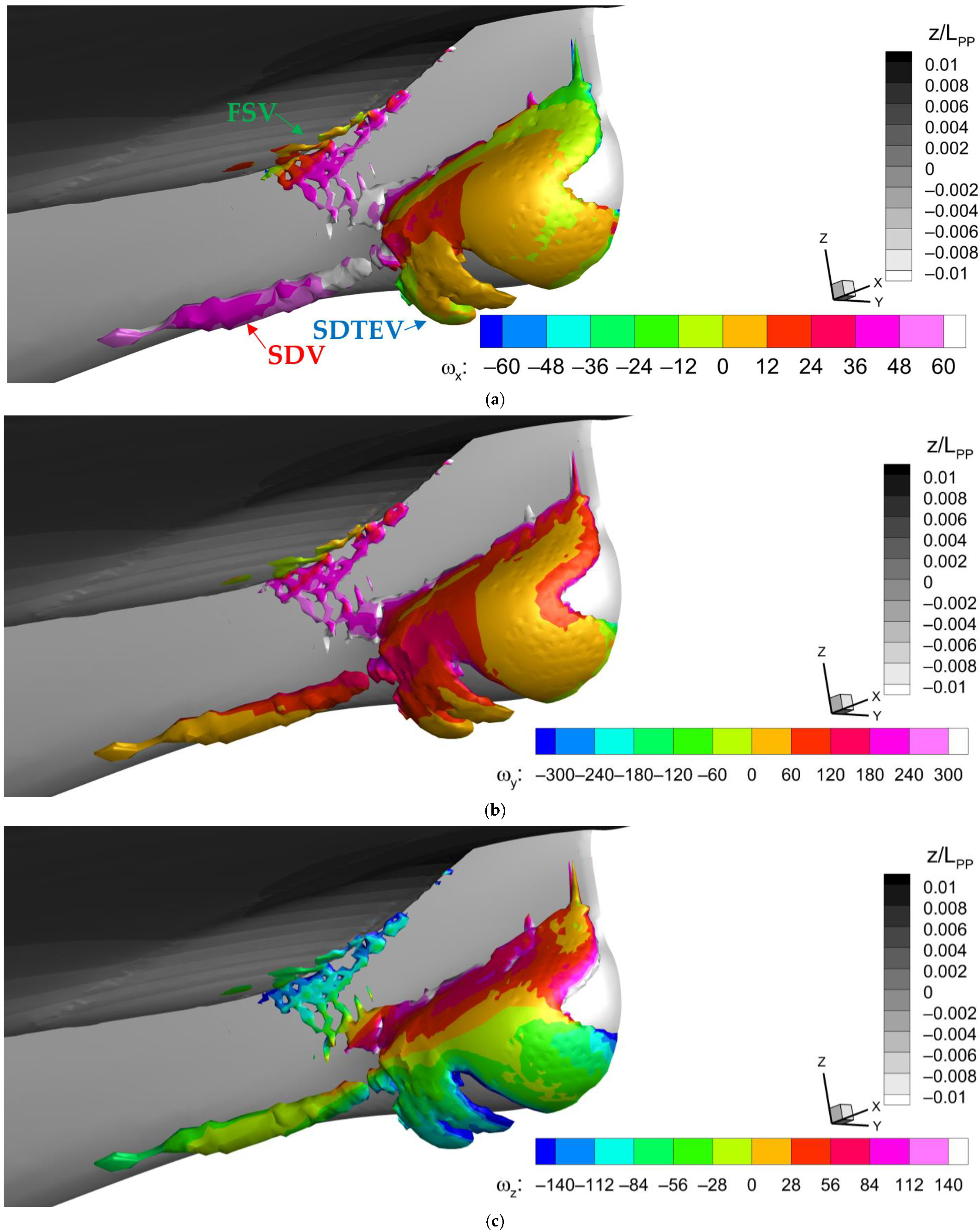
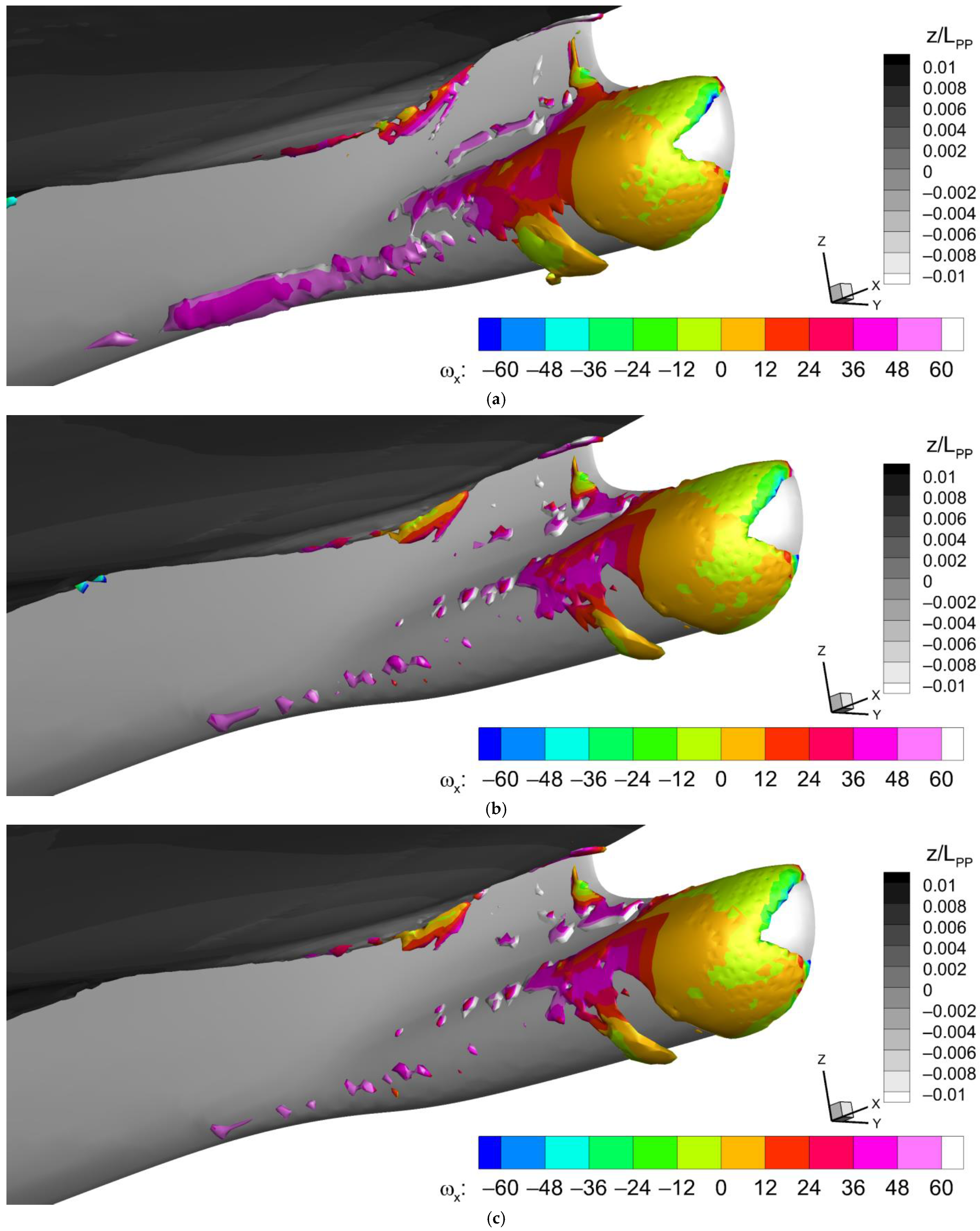
4.7. Vortical Structures around Sonar Dome
5. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Molland, A.F.; Turnock, S.R.; Hudson, D.A. Ship Resistance and Propulsion, 1st ed.; Cambridge University Press: New York, NY, USA, 2017; pp. 323–327. [Google Scholar]
- Wigley, W.C.S. The theory of the bulbous bow and its practical application. Trans. North East Coast Inst. Eng. Shipbuild. 1936, 52, 1935–1936. [Google Scholar]
- Steele, B.N.; Pearce, G.B. Experimental determination of the distribution of skin friction on a model of a high speed liner. Trans. R. Inst. Nav. Arch. 1968, 110, 79–100. [Google Scholar]
- Shearer, J.R.; Steele, B.N. Some aspects of the resistance of full form ships. Trans. R. Inst. Nav. Arch. 1970, 112, 465–486. [Google Scholar]
- Ferguson, A.M.; Dand, I.W. Hull and bulbous bow interaction. Trans. R. Inst. Nav. Arch. 1970, 112, 421–441. [Google Scholar]
- BSRA. Methodical series experiments on single-screw ocean-going merchant ship forms. Extended and revised overall analysis. BSRA Rep. NS 333 1971, 89, 85–95. [Google Scholar]
- Moor, D.I. Resistance and propulsion properties of some modern single screw tanker and bulk carrier forms. Trans. R. Inst. Nav. Arch. 1975, 117, 201–204. [Google Scholar]
- Kracht, A.M. Design of bulbous bows. Trans. Soc. Nav. Arch. Mar. Eng. 1978, 86, 197–217. [Google Scholar]
- Hoyle, J.W.; Cheng, B.H.; Hays, B. A Bulbous Bow Design Methodology for High-Speed Ships. Soc. Nav. Arch. Mar. Eng.-Trans. 1986, 94, Preprint No. 1. [Google Scholar]
- Castro, R.A.; Azpíroz, J.J.A.; Fernández, M.M. El Proyecto Basico del Buque Mercante, 2nd ed.; Fondo Editorial de Ingeniería Naval: Madrid, Spain, 1997; pp. 1–655. (In Spanish) [Google Scholar]
- Park, A.S.; Lee, Y.G.; Kim, D.D.; Yu, J.W.; Ha, Y.J.; Jin, S.H. A study on the resistance reduction of G/T 190ton class main vessel in Korean large purse seiner fishing system. J. Soc. Nav. Arch. Korea 2012, 49, 367–375. (In Korean) [Google Scholar] [CrossRef] [Green Version]
- Holtrop, J. A statistical re-analysis of resistance and propulsion data. Int. Shipbuild. Prog. 1984, 31, 272–276. [Google Scholar]
- Watson, D.G.M. Practical Ship Design; Elsevier Science: Oxford, UK, 1998. [Google Scholar]
- Liao, P.; Song, W.; Du, P.; Feng, F.; Zhang, Y. Aerodynamic Intelligent Topology Design (AITD)-A Future Technology for Exploring the New Concept Configuration of Aircraft. Aerospace 2023, 10, 46. [Google Scholar] [CrossRef]
- Liao, P.; Song, W.; Du, P.; Zhao, H. Multi-fidelity convolutional neural network surrogate model for aerodynamic optimization based on transfer learning. Phys. Fluids 2021, 33, 127121. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, W.; Wan, D. Hull form optimization based on calm-water wave drag with or without generating bulbous bow. Appl. Ocean Res. 2021, 116, 102861. [Google Scholar] [CrossRef]
- SEA-Japan, No. 303. Available online: https://www.jsea.or.jp/wp_2022/wp-content/uploads/2015/06/Sea303.pdf (accessed on 1 February 2004).
- Hirota, K.; Matsumoto, K.; Takagishi, K.; Orihara, H.; Yoshida, H. Verification of ax-bow effect based on full scale measurement. J. Kansai Soc. Nav. Arch. Jpn. 2004, 241, 33–40. (In Japanese) [Google Scholar]
- Sadat-Hosseini, H.; Wu, P.C.; Carrica, P.M.; Kim, H.; Toda, Y.; Stern, F. CFD verification and validation of added resistance and motions of KVLCC2 with fixed and free surge in short and long head waves. Ocean Eng. 2013, 59, 240–273. [Google Scholar] [CrossRef]
- Yang, K.K.; Kim, Y. Numerical analysis of added resistance on blunt ships with different bow shapes in short waves. J. Mar. Sci. Technol. 2017, 22, 245–258. [Google Scholar] [CrossRef] [Green Version]
- Le, T.-K.; He, N.V.; Hien, N.V.; Bui, N.-T. Effects of a Bulbous Bow Shape on Added Resistance Acting on the Hull of a Ship in Regular Head Wave. J. Mar. Sci. Eng. 2021, 9, 559. [Google Scholar] [CrossRef]
- Cusanelli, D.S.; Karafiath, G. Combined Bulbous Bow and Sonar Dome for a Vessel. U.S. Patent No. US 52,80,761, 25 January 1994. [Google Scholar]
- Cusanelli, D.S.; Karafiath, G. Hydrodynamic Energy Savings Enhancements for DDG 51 Class Ships. In Proceedings of the ASNE (American Society of Naval Engineers) Day, Crystal City, Arlington, VA, USA, 9–10 February 2012. [Google Scholar]
- Sharma, R.; Sha, O.P. Hydrodynamic Design of Integrated Bulbous Bowl sonar Dome for Naval Ships. Def. Sci. J. 2005, 55, 21–36. [Google Scholar] [CrossRef] [Green Version]
- Kandasamy, M.; Wu, P.C.; Zalek, S.; Karr, D.; Bartlett, S.; Nguyen, L.; Stern, F. CFD based hydrodynamic optimization and structural analysis of the hybrid ship hull. Trans. Soc. Nav. Arch. Mar. Eng. 2014, 122, 92–123. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of Fluid Method for the Dynamics of Free Boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Rusche, H. Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase Fractions. Ph.D. Thesis, Imperial College London, London, UK, December 2002. [Google Scholar]
- Graveleau, M. Pore-Scale Simulation of Mass Transfer across Immiscible Interfaces. Master’s Thesis, Stanford University, Stanford, CA, USA, June 2016. [Google Scholar]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. In Proceedings of the 4th International Symposium on Turbulence, Heat and Mass Transfer, Antalya, Turkey, 12–17 October 2003. [Google Scholar]
- OpenFOAM User Guide. Available online: https://www.openfoam.com/documentation/guides/latest/doc/guide-turbulence-ras-k-omega-sst.html (accessed on 5 March 2023).
- Holzmann, T. The numerical algorithms: SIMPLE, PISO and PIMPLE. In Mathematics, Numerics, Derivations and OpenFOAM®; Holzmann CFD: Loeben, Germany, 2006; pp. 93–121. [Google Scholar]
- ITTC-Quality Manual 7.5-03-01-01, CFD General. Uncertainty Analysis in CFD Verification and Validation Methodology and Procedures. ITTC Recommended Procedures and Guidelines. Available online: https://ittc.info/media/4184/75-03-01-01.pdf (accessed on 31 January 2023).
- Liu, F. A thorough description of how wall functions are implemented in OpenFOAM. In Proceedings of the CFD with OpenSource Software, Chalmers University of Technology, Gothenburg, Sweden, 22 January 2017. [Google Scholar]
- OpenFOAM User Guide. Available online: https://www.openfoam.com/documentation/guides/latest/doc/guide-bcs-wall-turbulence-nutkRoughWallFunction.html (accessed on 31 January 2023).
- Kelvin, L. On the waves produced by a single impulse in water of any depth. Proc. R. Soc. Lond. 1887, 42, 80–83. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics, 1st ed.; The MIT Press: Cambridge, MA, USA, 1977; pp. 237–320. [Google Scholar]
- Jeong, J.; Hussain, F. On the identification of a vortex. J. Fluid Mech. 1995, 285, 69–94. [Google Scholar] [CrossRef]
- Bhushan, S.; Xing, T.; Visonneau, M.; Wackers, J.; Deng, G.; Stern, F.; Larsson, L. Post workshop computations and analysis for KVLCC2 and 5415. In Numerical Ship Hydrodynamics, 1st ed.; Larsson, L., Stern, F., Visonneau, M., Eds.; Springer: Dordrecht, The Netherlands, 2014; pp. 286–318. [Google Scholar]
- Bhushan, S.; Carrica, P.; Yang, J.; Stern, F. Scalability studies and large grid computations for surface combatant using CFDShip-Iowa. Int. J. High Perform. Comput. Appl. 2011, 25, 466–487. [Google Scholar] [CrossRef]
- Tahara, Y.; Norisada, K.; Yamane, M.; Takai, T. Development and demonstration of CAD/CFD/optimizer integrated simulation-based design framework by using high-fidelity viscous free-surface RANS equation solver. J. Jpn. Soc. Nav. Archit. Ocean Eng. 2008, 7, 171–184. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship’s Particulars | Test Conditions | ||
|---|---|---|---|
| L = LPP (m) | 3 | U0 (m/s) | 1.248 |
| BWL (m) | 0.39 | Fn | 0.23 |
| t (m) | 0.115 | Rn | 4.307 × 106 |
| CB | 0.52 | T (°C) | 26.2 |
| AW (m2) | 1.335 | ρ (kg/m3) | 996.7 |
| (m3) | 0.06856 | (m2/s) | 8.663 × 10−4 |
| Term | Symbol | Method | Order |
|---|---|---|---|
| Time | Implicit Euler with local time stepping | 1st | |
| Gradient | Central difference | 1st | |
| Divergence | Upwind method | 2nd | |
| Laplacian | Linear interpolation | 1st | |
| Gradient in normal direction n on surface | Explicit with non-orthogonal correction | 2nd |
| Fine Grid (S1) | Medium Grid (S2) | Coarse Grid (S3) | |
|---|---|---|---|
| F0 | 4,258,466 | 1,441,917 | 457,872 |
| F0.225 | 4,254,563 | 1,441,124 | 457,871 |
| Grid difference | 0.0917% | 0.0550% | 0.0002% |
| Sonar Dome | S1 (N) | S2 (N) | S3 (N) | RG | D | UG | |||
|---|---|---|---|---|---|---|---|---|---|
| F0 | R | 21.937 | 22.289 | 22.829 | 0.653 < 1 → verified | 22.01 | 1.61 | 0.614 | 3.77%D > 0.33% → validated |
| E%D | 0.33% | −1.27% | −3.72% | ||||||
| average y+ | 154.7 | 159.1 | 162.3 | ||||||
| F0.225 | R | 18.061 | 18.468 | 19.162 | 0.586 < 1 → verified | - | 2.25 | 0.770 | 3.99%S1 (validated) |
| average y+ | 163.9 | 164.5 | 168.9 |
| Geometry | /LPP (%) | RT (N) | Rp (N) | Rf (N) |
|---|---|---|---|---|
| F0 | 0 | 22.289 | 11.398 | 10.891 |
| F0.02 | 0.667 | 21.501 | 10.623 | 10.878 |
| F0.04 | 1.333 | 20.713 | 9.833 | 10.881 |
| F0.06 | 2.000 | 20.248 | 9.428 | 10.820 |
| F0.08 | 2.667 | 19.846 | 8.910 | 10.937 |
| F0.10 | 3.333 | 19.387 | 8.397 | 10.990 |
| F0.12 | 4.000 | 19.099 | 8.100 | 10.999 |
| F0.14 | 4.667 | 18.904 | 7.820 | 11.084 |
| F0.16 | 5.333 | 18.885 | 7.724 | 11.161 |
| F0.18 | 6.000 | 18.677 | 7.491 | 11.186 |
| F0.20 | 6.667 | 18.594 | 7.350 | 11.244 |
| F0.21 | 7.000 | 18.530 | 7.261 | 11.269 |
| F0.215 | 7.167 | 18.568 | 7.306 | 11.262 |
| F0.22 | 7.333 | 18.570 | 7.304 | 11.266 |
| F0.2225 | 7.417 | 18.493 | 7.270 | 11.223 |
| F0.225 | 7.500 | 18.468 | 7.157 | 11.312 |
| F0.2275 | 7.583 | 18.555 | 7.250 | 11.305 |
| F0.23 | 7.667 | 18.553 | 7.233 | 11.320 |
| F0.235 | 7.833 | 18.517 | 7.190 | 11.327 |
| F0.24 | 8.000 | 18.535 | 7.213 | 11.322 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, P.-C.; Chen, J.-Y.; Wu, C.-I.; Lin, J.-T. CFD Investigation for Sonar Dome with Bulbous Bow Effect. Inventions 2023, 8, 58. https://doi.org/10.3390/inventions8020058
Wu P-C, Chen J-Y, Wu C-I, Lin J-T. CFD Investigation for Sonar Dome with Bulbous Bow Effect. Inventions. 2023; 8(2):58. https://doi.org/10.3390/inventions8020058
Chicago/Turabian StyleWu, Ping-Chen, Jiun-Yu Chen, Chen-I Wu, and Jiun-Ting Lin. 2023. "CFD Investigation for Sonar Dome with Bulbous Bow Effect" Inventions 8, no. 2: 58. https://doi.org/10.3390/inventions8020058
APA StyleWu, P. -C., Chen, J. -Y., Wu, C. -I., & Lin, J. -T. (2023). CFD Investigation for Sonar Dome with Bulbous Bow Effect. Inventions, 8(2), 58. https://doi.org/10.3390/inventions8020058