

Investigations on Using Intelligent Learning Techniques for Anomaly Detection and Diagnosis in Sensors Signals in Li-Ion Battery—Case Study

 ,
, 
Abstract
:1. Introduction
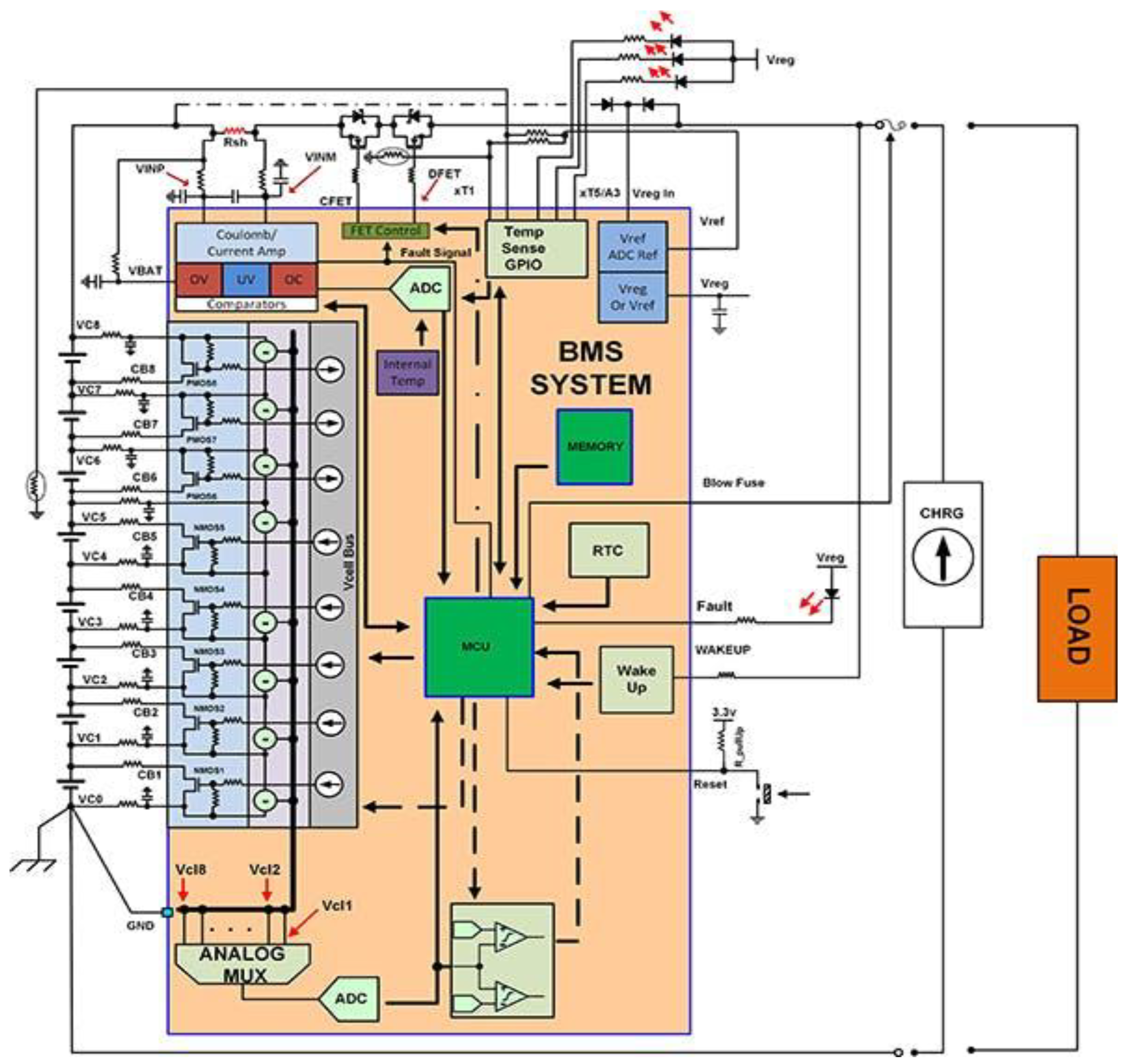
1.1. Preliminaries—Data Acquisition Equipment and BMS Architectures
1.2. Traditional Model-Based and Deep Learning Data-Driven-Based Models Estimation Techniques—Literature Review
2. Materials and Methods
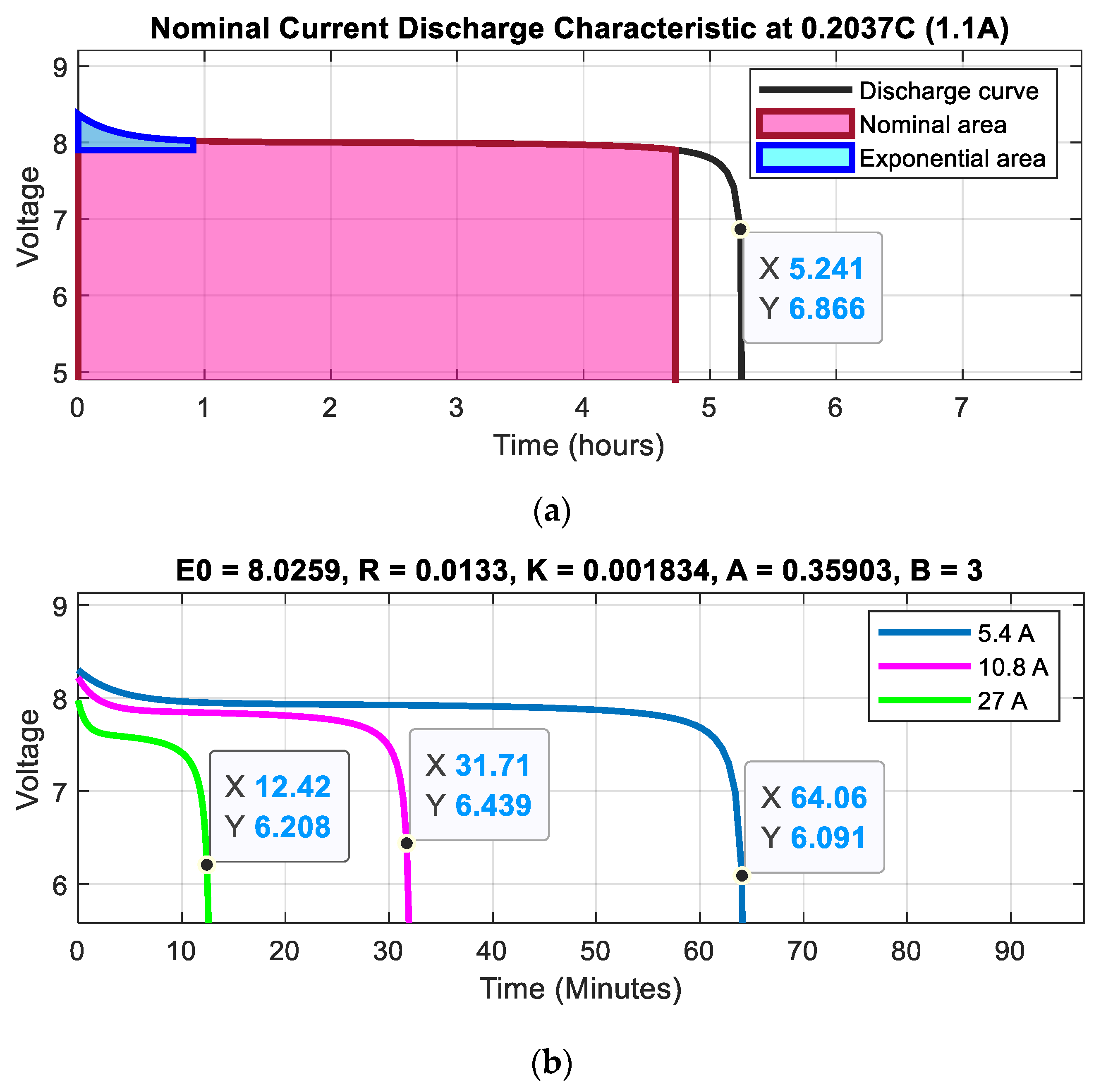
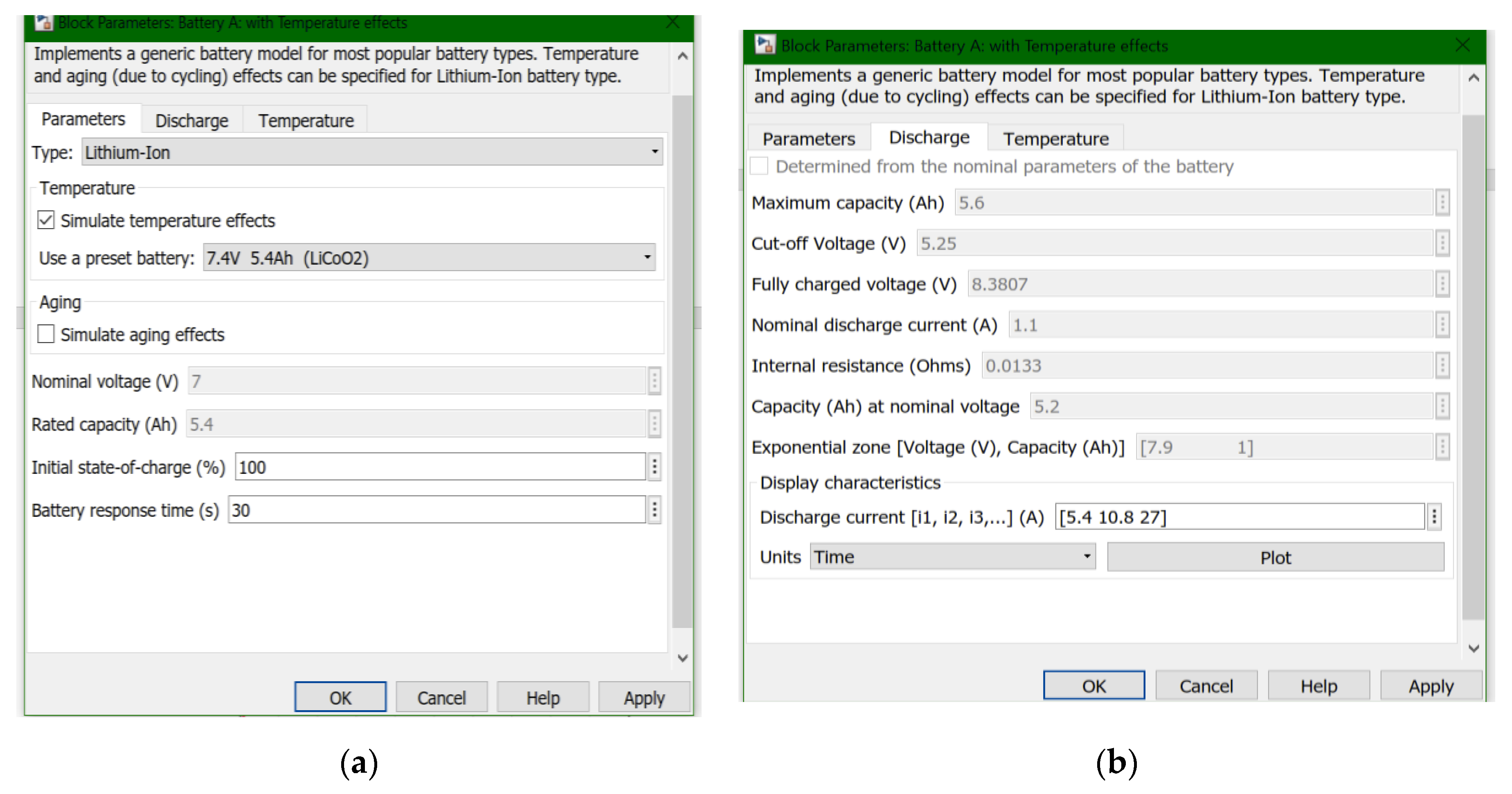
2.1. Li-Ion Model Selection and Simulink Simscape Block Setup
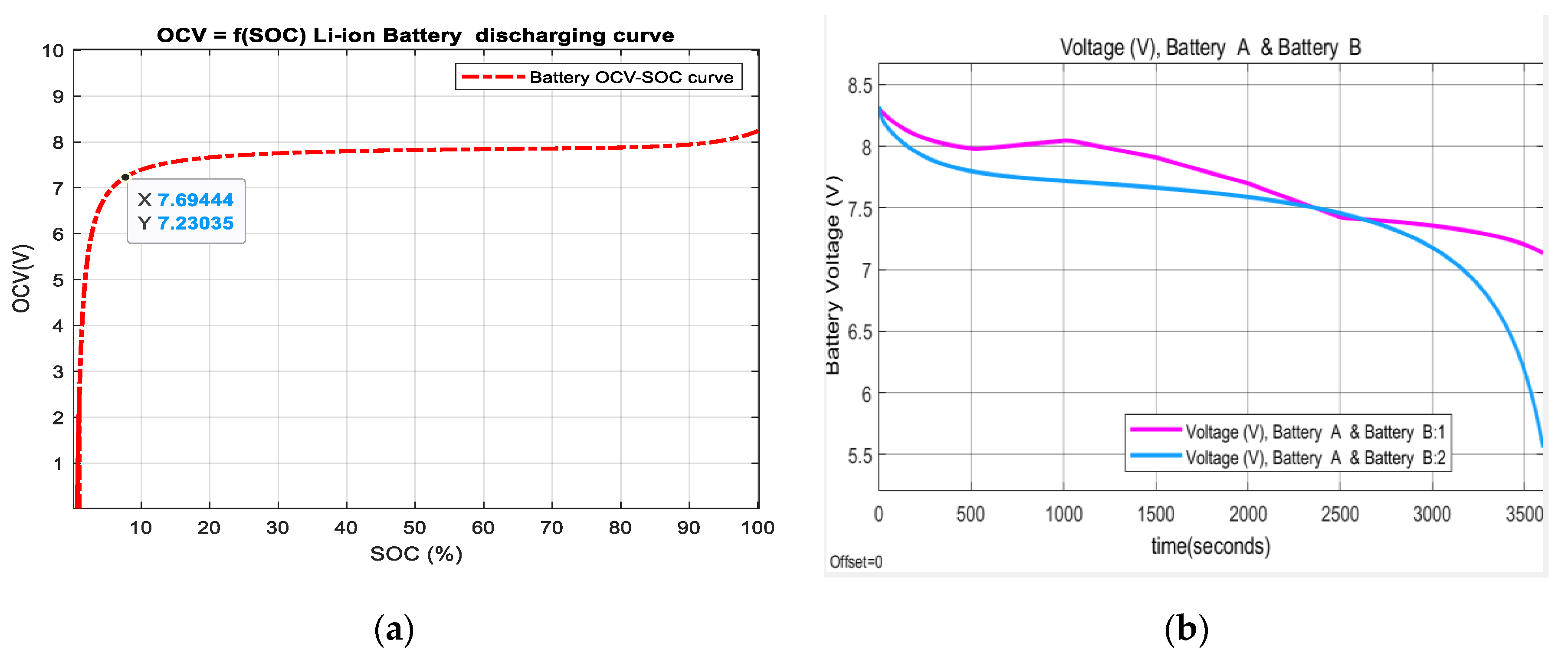
2.1.1. Li-Ion Cobalt Battery Type Model Performance with and without Temperature Effects
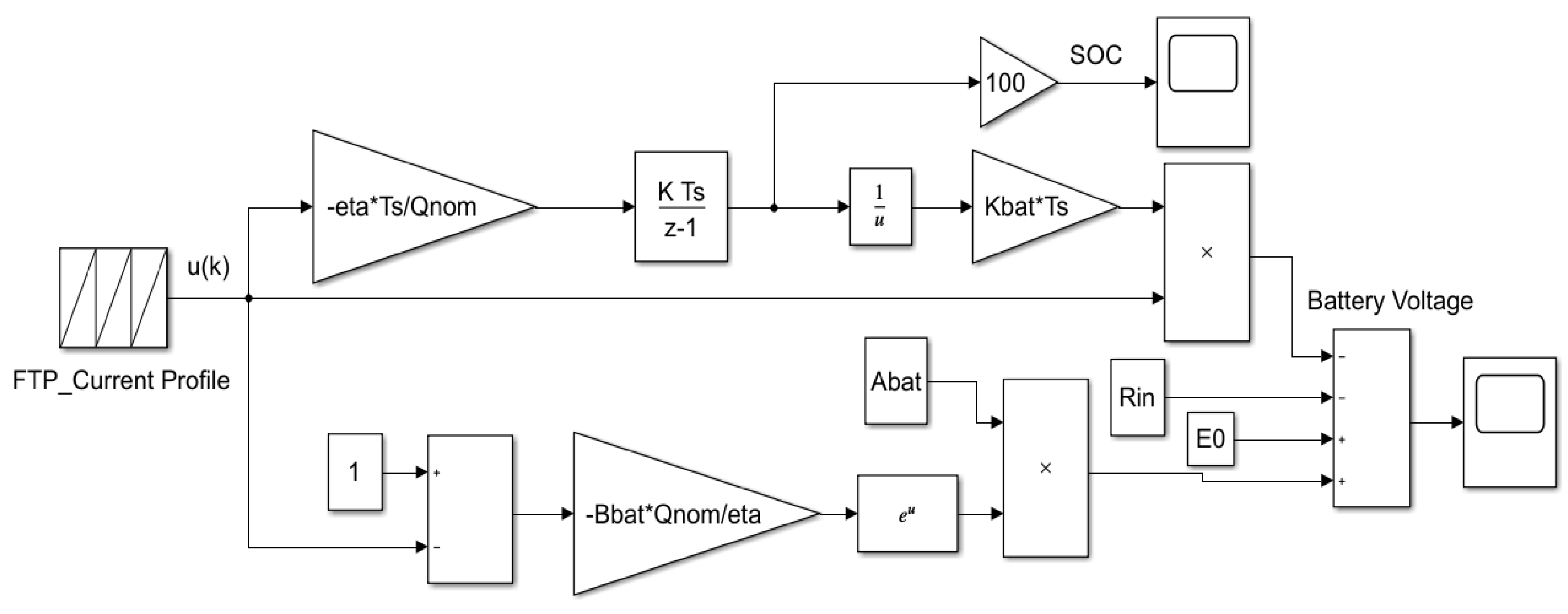
2.1.2. Li-Ion Cobalt Type Battery -Analytical Model
2.2. Anomaly Detection and Diagnosis Techniques for Li-Ion Battery—Additive Bias Faults within Voltage and Current Measurement Sensors
2.2.1. Joint State and Parameter EKF Estimation for Fault Detection and Diagnosis of Anomalies in LIB’s Sensors
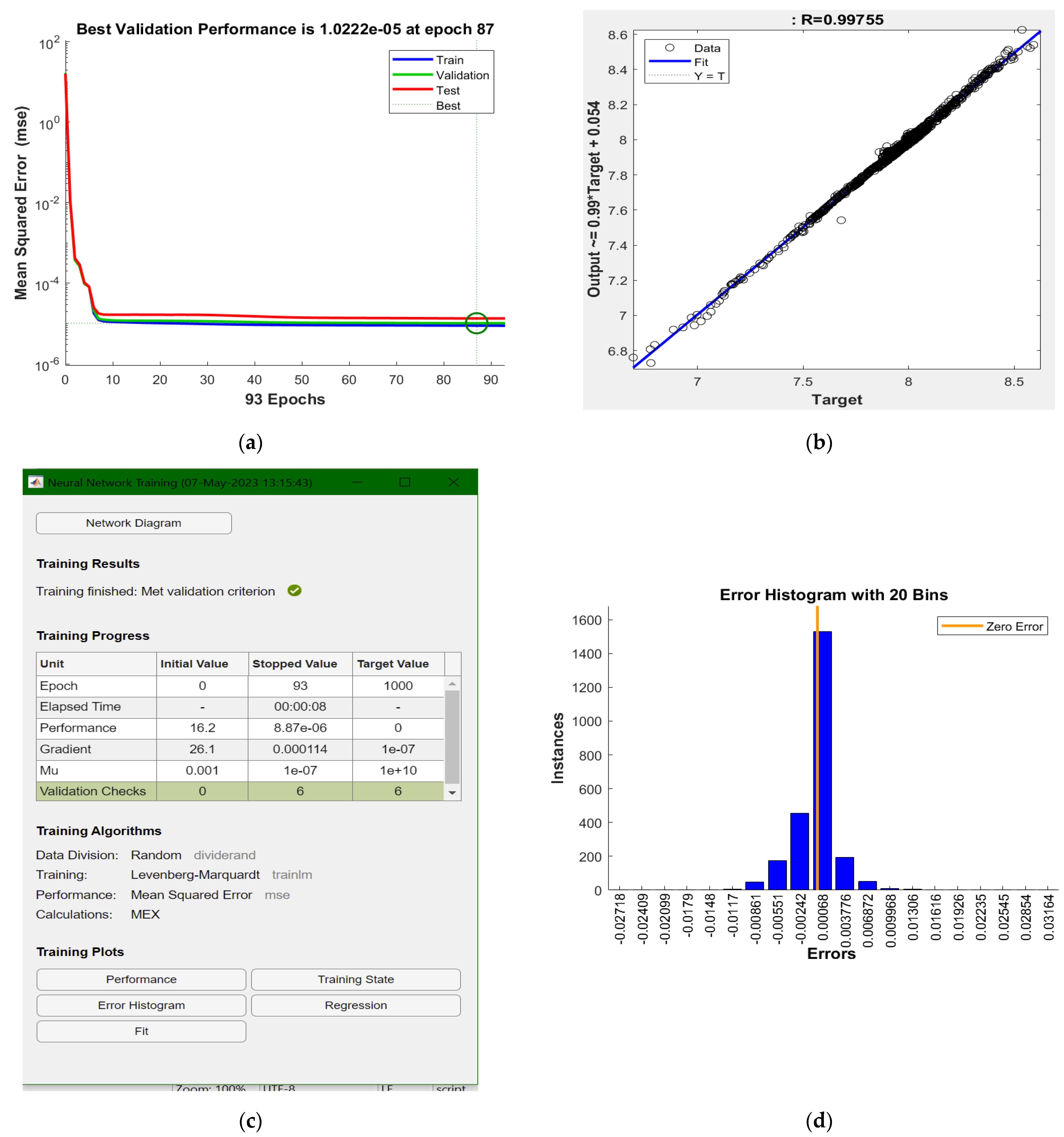
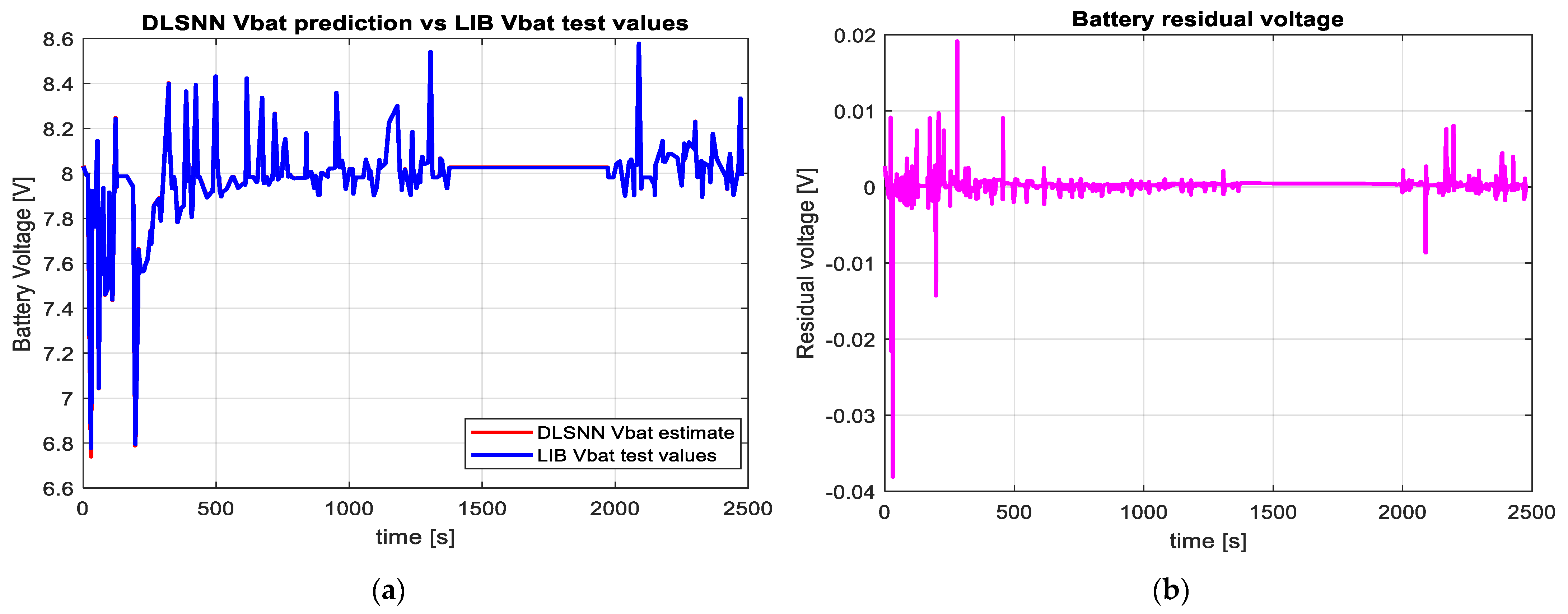
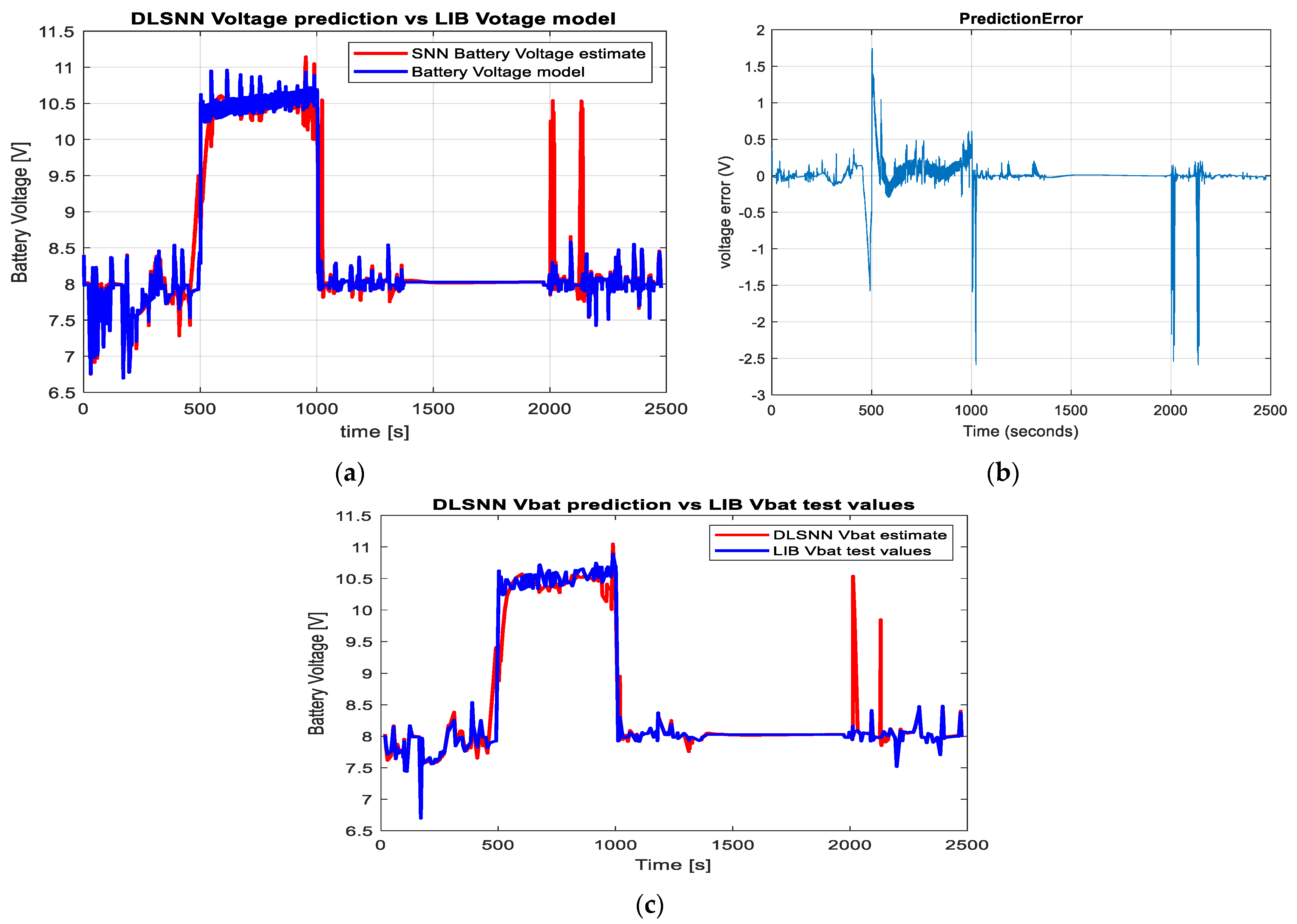
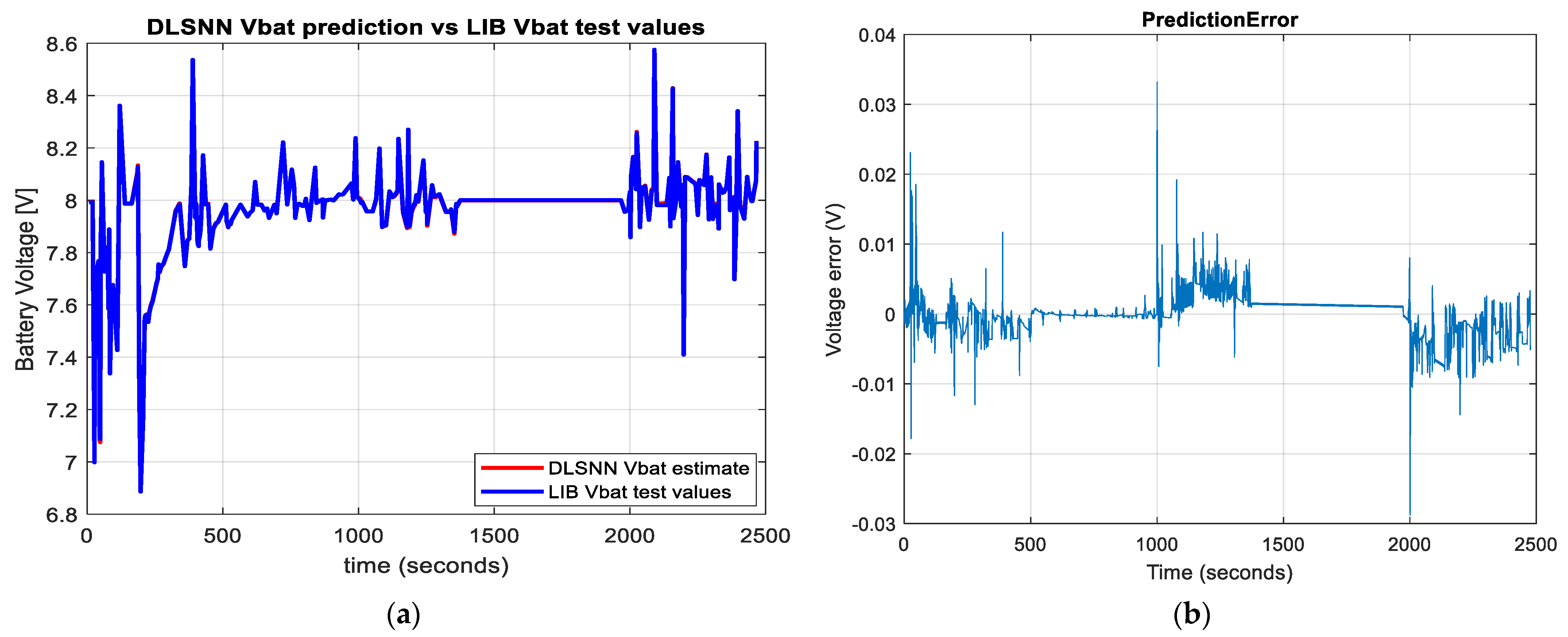
2.2.2. Data-Driven-Based Deep Learning Shallow Neural Network for Anomaly Prediction into Sensors’ Measurement Dataset
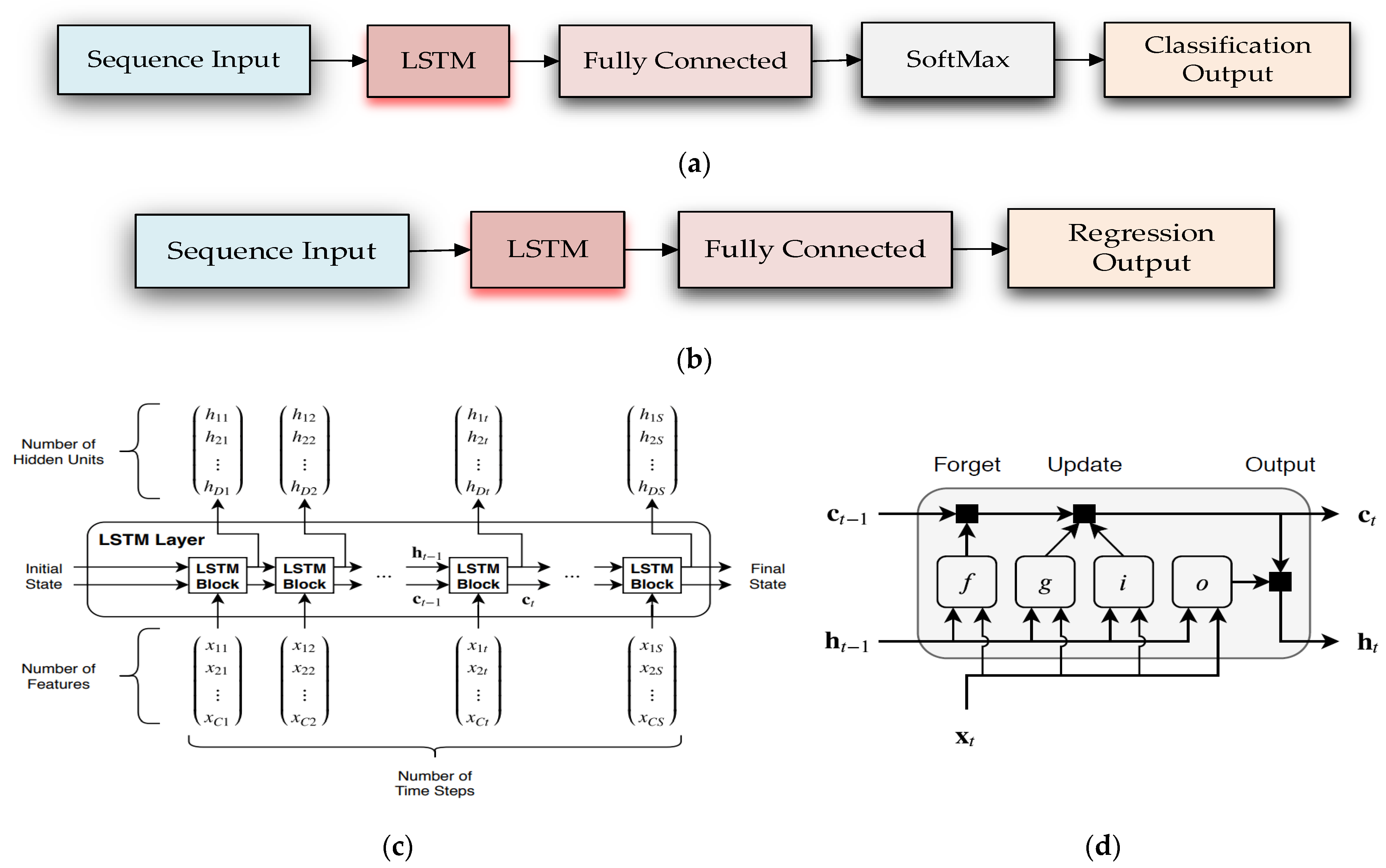
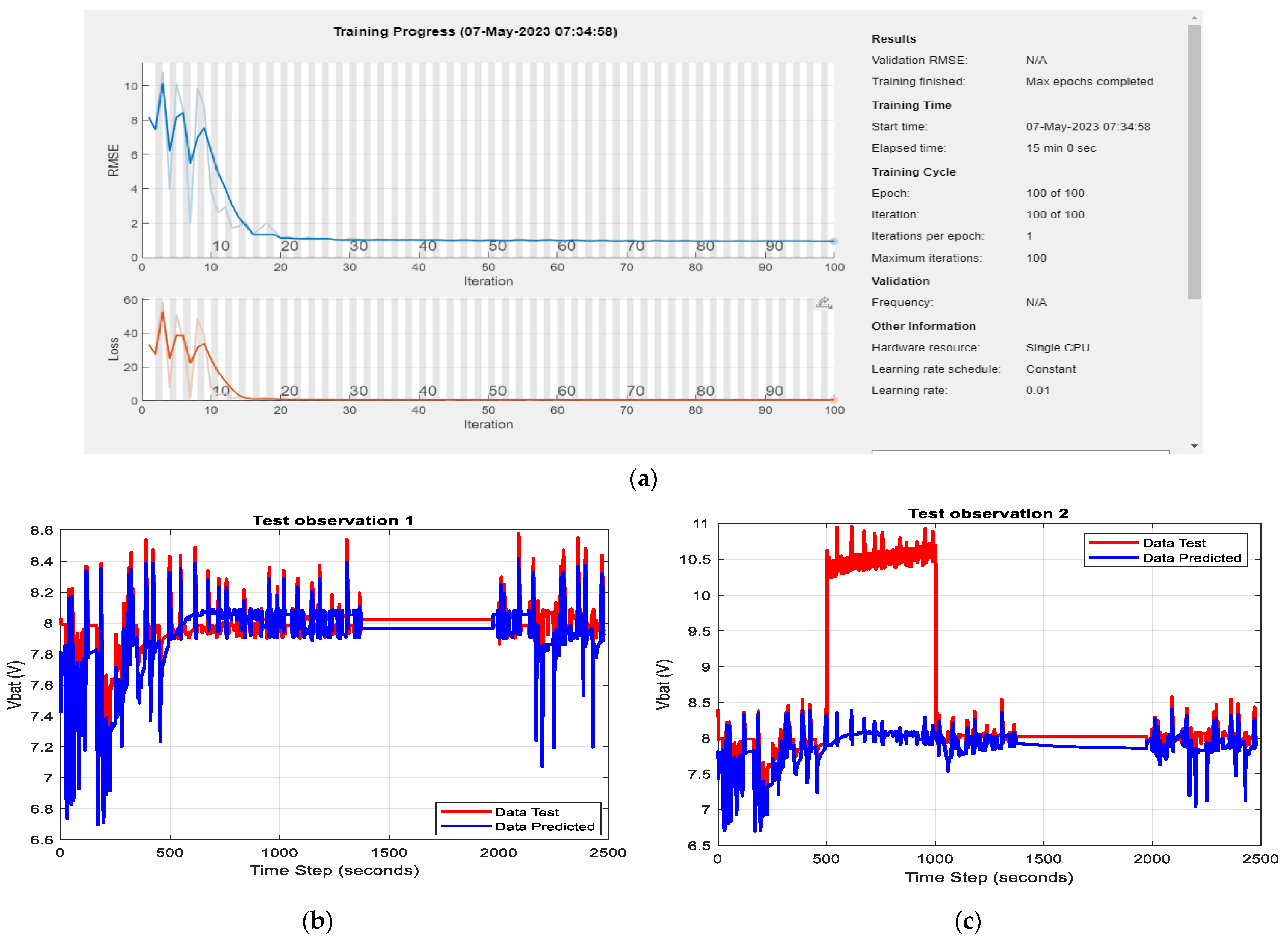
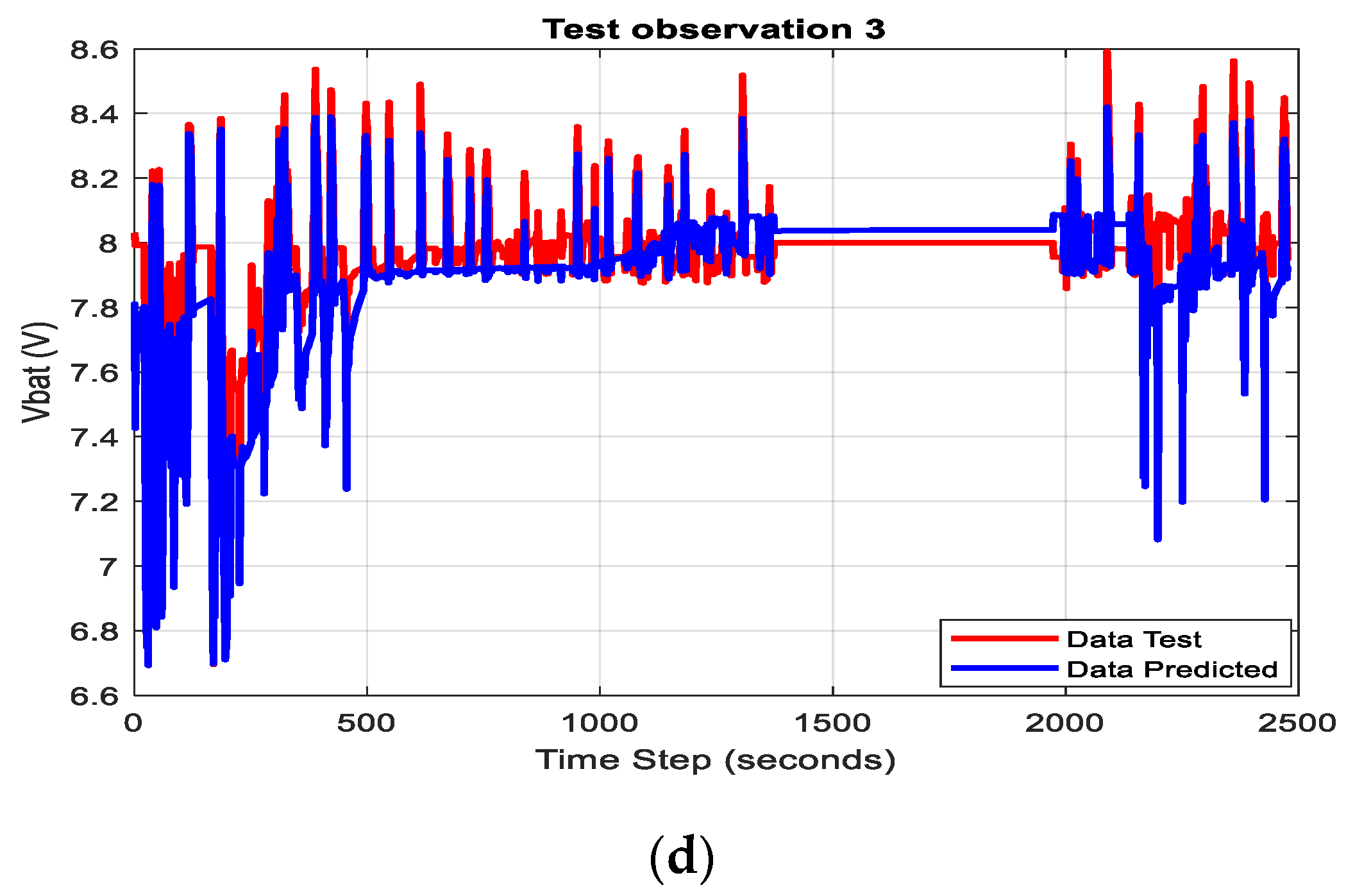
2.2.3. LSTM Li-Ion Battery SOC Estimation and Fault Detection using LSTM Deep Learning Neural Network
- Input gate (i) controls the level of cell state update
- Forget gate (f) controls the level of cell state reset (forget)
- Cell candidate (g) adds information to the cell state.
- Output gate (o) controls the level of cell state added to the hidden state.
- Input gate:
- Forget gate:
- Cell candidate:
- Output gate:
- Step 1.
- Load dataset input-output measurements (healthy-subscript h, faulty: subscript fv for voltage fault, fc for current fault, and for dataset test to asses the classification accuracy is used the subscript new)Vbat = [Yh Yfv Yh_new Yfc] is battery terminal voltage sequence: healthy-voltage fault-new healthy dataset-current faultSOC = [SOCh SOCfv SOC_new SOCfc] for the battery SOC sequence with the same meaning as for Vbat
- Step 2.
- Create Cell Array for XTrain and YTrain with combinations of Vbat and SOC,Condition Code: 0-Healthy, 1-Fault Voltage,2-Fault Current; 3-False alarm.XTrain = {[Yh,SOCh]’; [Yfv,SOCfv]’; [Yh_new,SOCh_new]’; [Yfc,SOCfc]’; [Yh,SOCfc]’} is training input sequenceYTrain = categorical{[‘0′,’1′,’2′,’3′]} denotes the output training sequence for anomaly classification (diagnosis)
- Step 3.
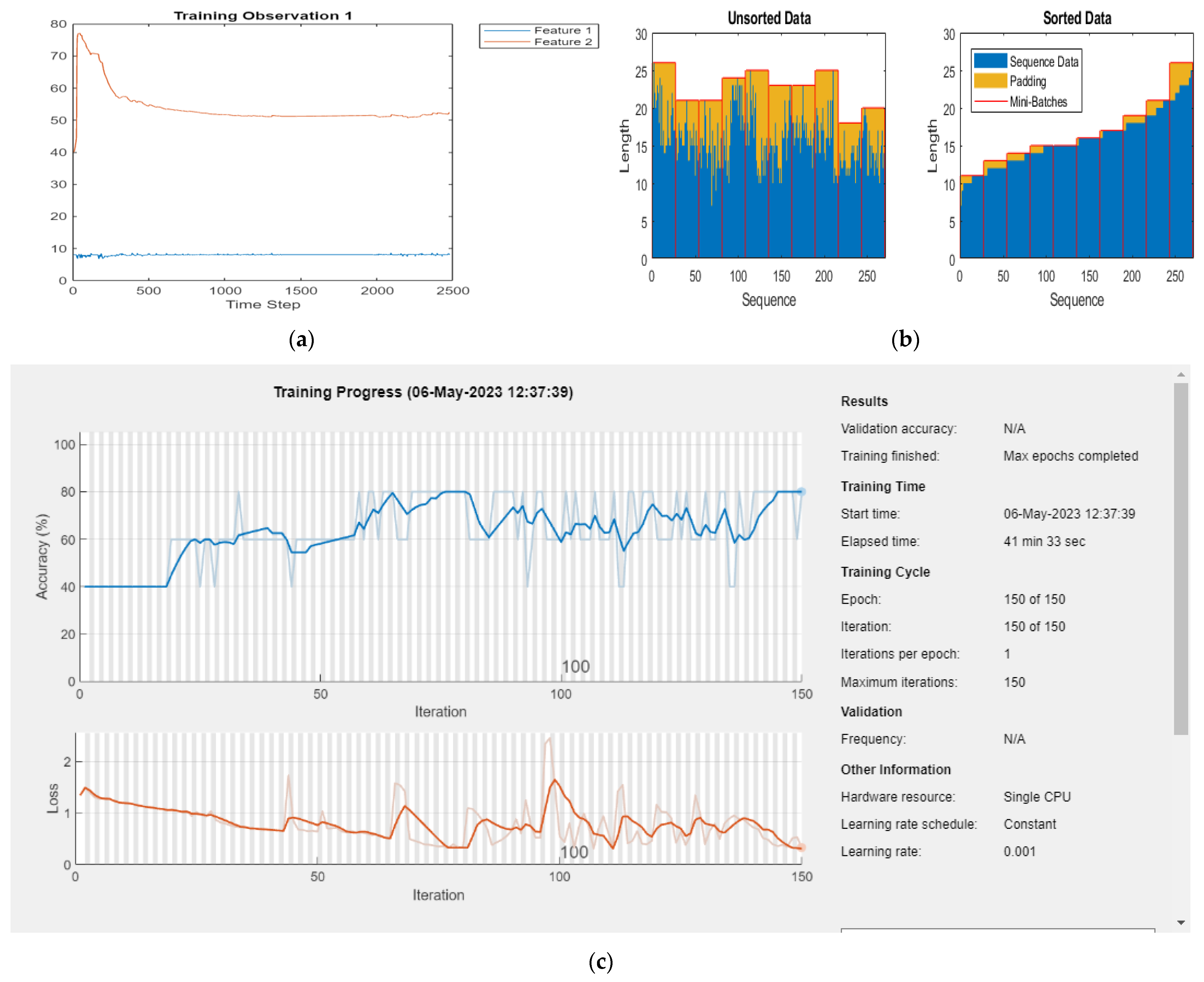
- Visualize the first time series in a plot. Each line corresponds to a feature.
- Step 4.
- Prepare the dataset for padding: During training, by default, the software splits the training data into mini-batches and pads the sequences so that they have the same length. However, too much padding can have a negative impact on the network performance.
- Step 5.
- Choose a mini-batch size of 50 to divide the training data evenly and reduce the amount of padding in the mini-batches.
- Step 6.
- Define the LSTM neural network architecture:
- Step 6.1.
- Specify the input size to be sequences of size 2 (the dimension of the input data: 4 features, each of dimension 2 × 2477)).
- Step 6.2.
- Specify a bidirectional LSTM layer with 250 hidden units, and output to the “last” element of the sequence.
- Step 6.3.
- Specify four classes by including a fully connected layer of size 4 (number of features), followed by a SoftMax layer and the classification layer.
- Step 6.4.
- Specify the options:
- Step 6.4.1.
- Specify solver to be “adam”
- Step 6.4.2.
- Setup the gradient threshold to be 0.5
- Step 6.4.3.
- Setup the maximum number of epochs to be 150.
- Step 6.4.4.
- Specify the sequence length to be “longest” (for the same length)
- Step 7.
- LSTM Training data phasenet = trainNetwork (XTrain, YTrainn, Layers, options)
- Step 8.
- LSTM data Test: test the LSTM with a never seen data input sequence.XTest = {[Yh, SOCh_new]’}YTest = categorical {[‘0′]}
- Step 9.
- LSTM Classification of the test data:YPred = classify (net, XTest), …MinibatchSize = minibatchSize,SequenceLength = “longest”
- Step 10.
- Calculate the classification accuracy of the predictions:acc = sum (YPred==YTest/numel (YTest))
- XTestnew = [Yh_new, SOCh]’;
- YPred = classify (net, XTest1)’,…
- MiniBatchSize =miniBatchSize,…
- SequenceLength = (“longest”);
- acc = sum (YPred –Ytest/numel (Ytest)
- YPred = 0;
- acc = 1;
3. Results
3.1. Li-Ion Cobalt Battery Type -Statistics Performance Evaluation
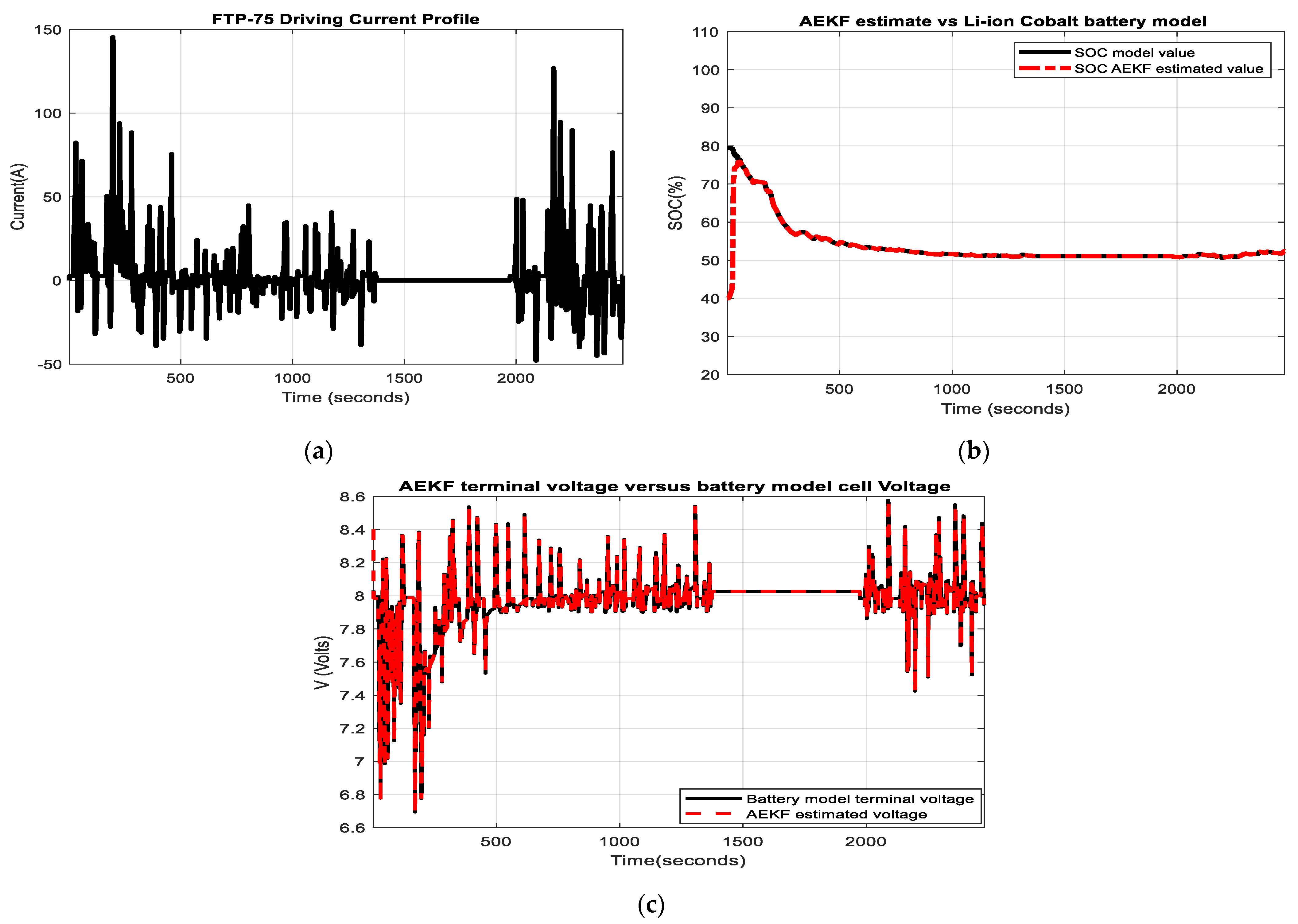
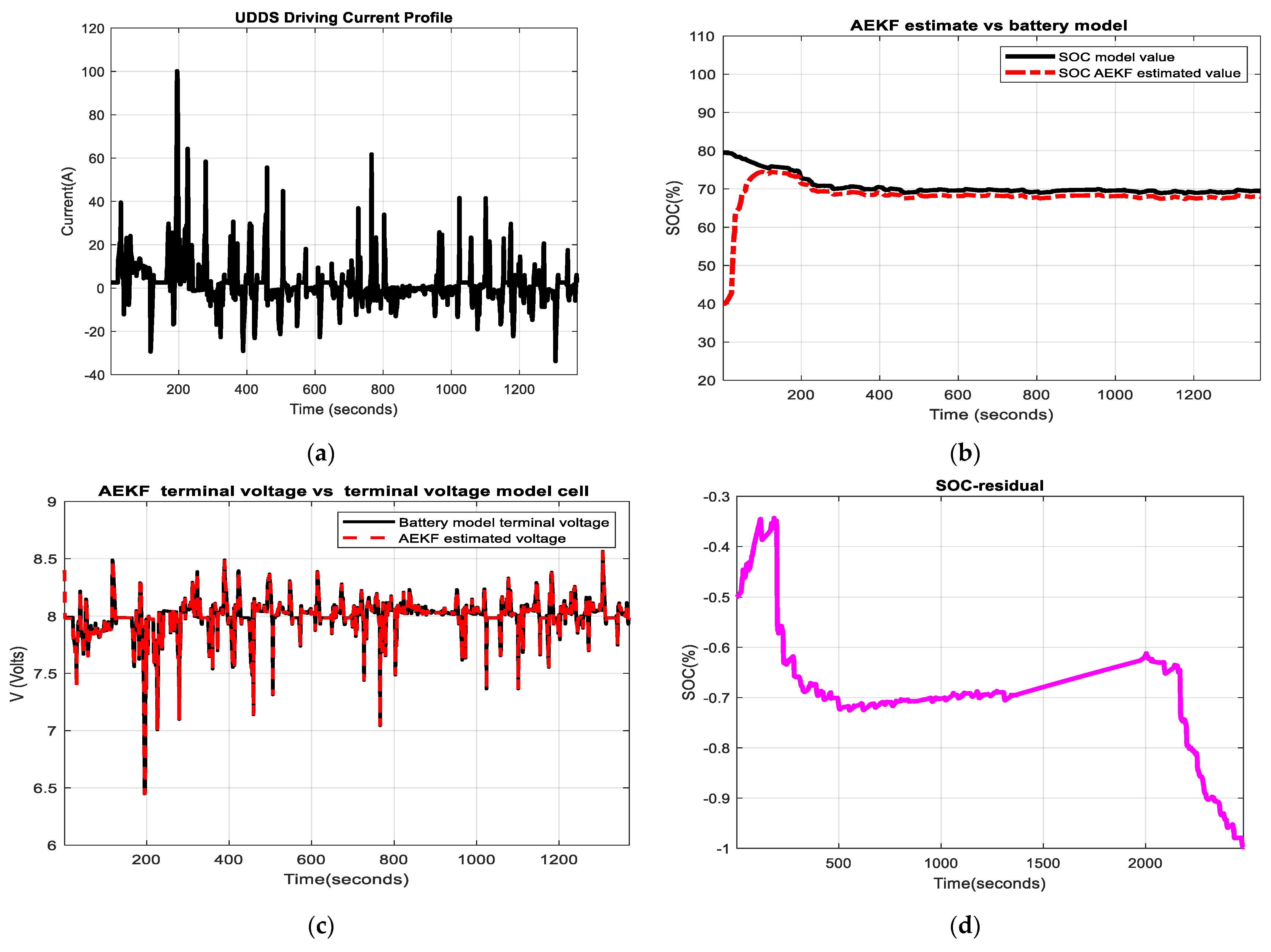
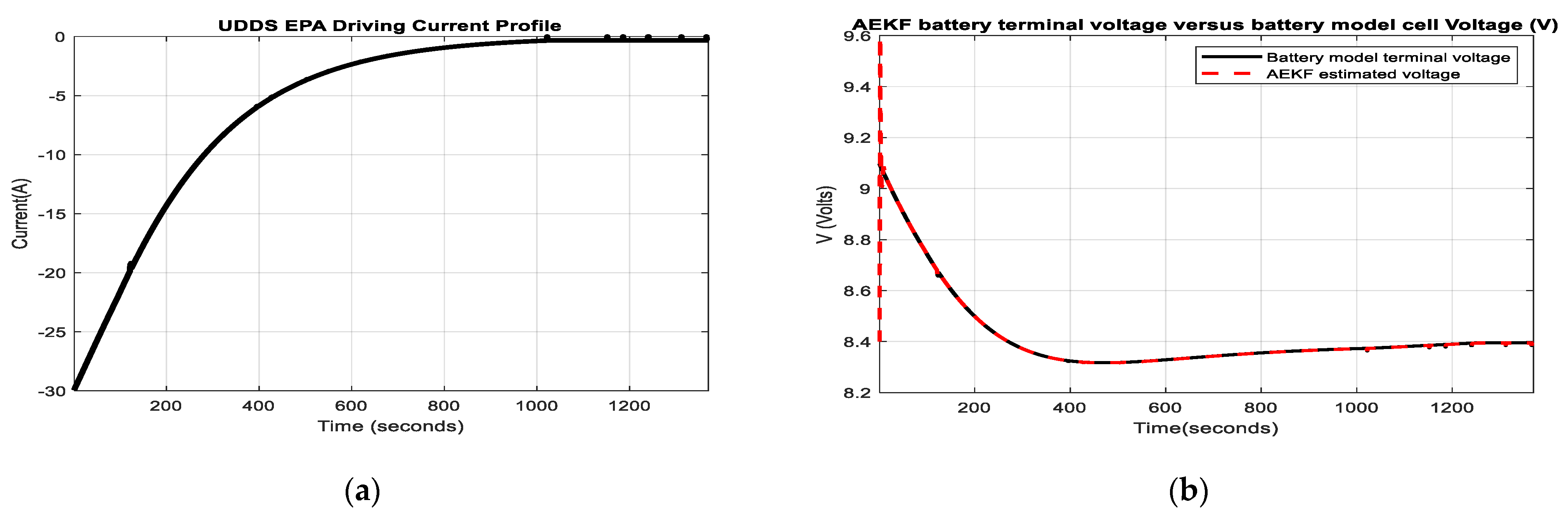
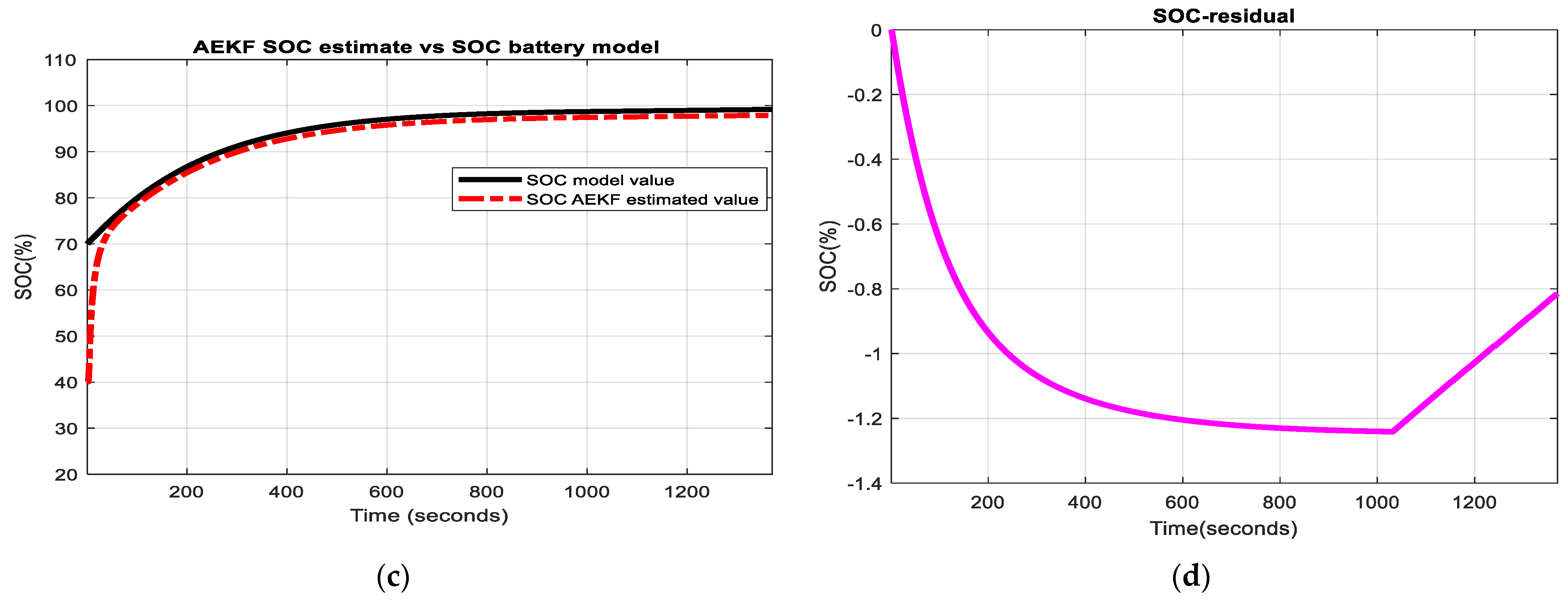
Li-Ion Cobalt Battery Generic Model- AEKF SOC Estimator Simulation Results
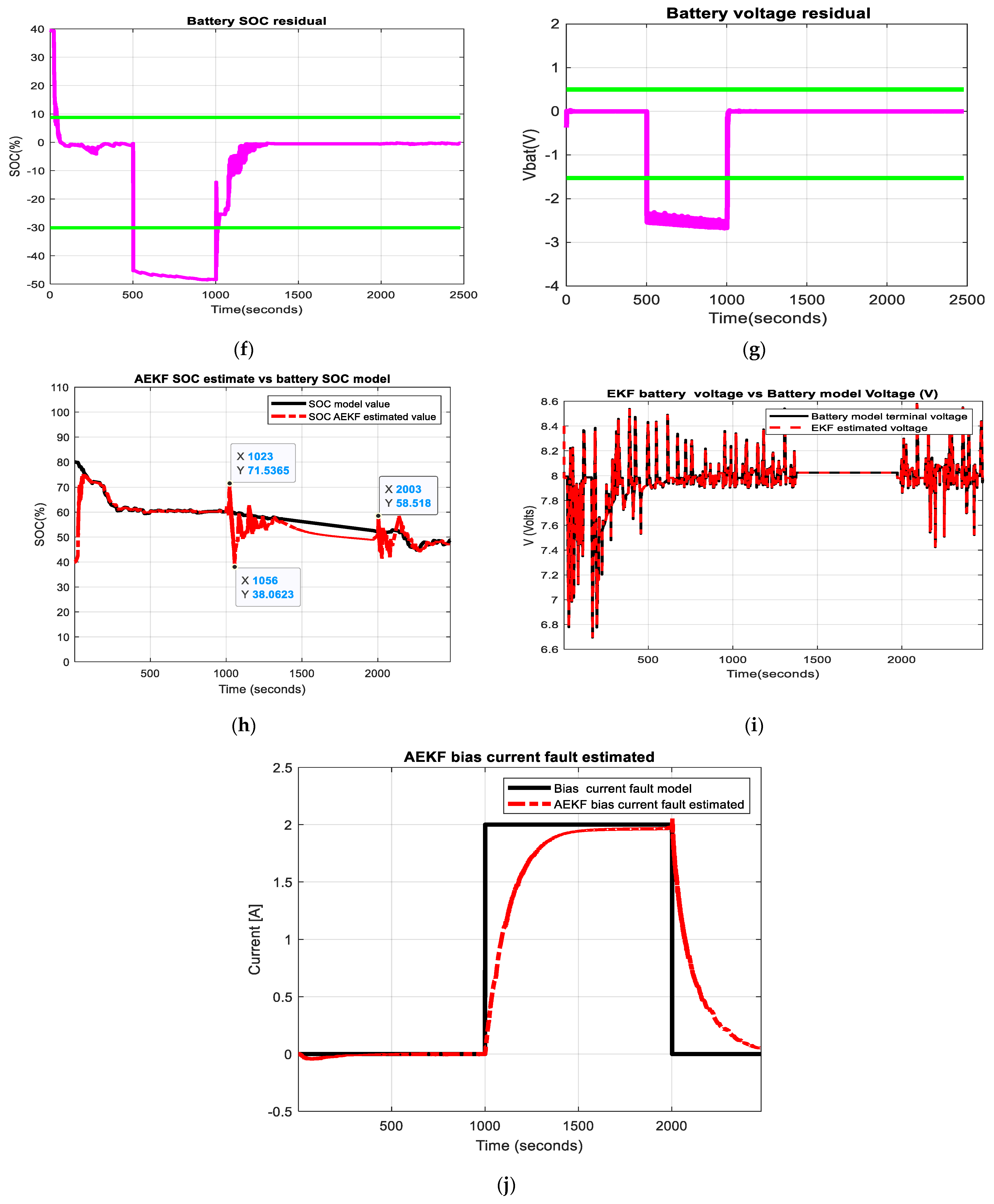
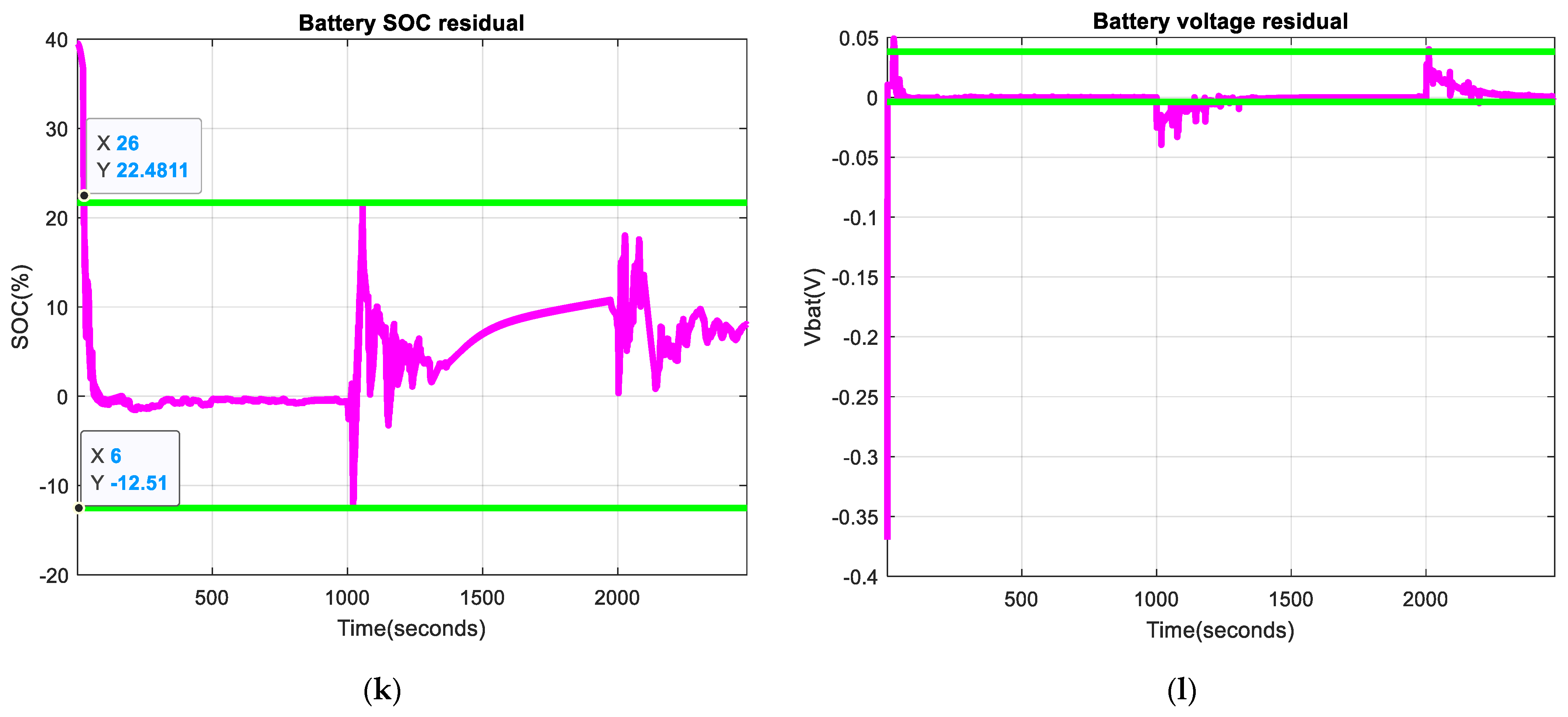
3.2. MATLAB Simulation Results for Joint Parameter and State Estimation EKF for Fault Detection and Isolation
3.3. DLSNN MATLAB Simulation Results
3.4. The LSTM Anomaly Classification-MATLAB Simulation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Becker, P.D. Alternative Energy; Christine Nasso, Greenhaven Press: Farmington Hills, MI, USA, 2010; 132p. [Google Scholar]
- García-Olivares, A.; Solé, J.; Osychenko, O. Transportation in a 100% renewable energy system. Energy Convers. Manag. 2018, 158, 266–285. [Google Scholar] [CrossRef]
- Young, K.; Wang, C.; Wang, L.Y.; Strunz, K. Electric vehicle battery technologies. In Electric Vehicle Integration into Modern Power Networks, 1st ed.; Garcia-Valle, R., Jap, L., Eds.; Springer: New York, NY, USA, 2013; Chapter 2; pp. 15–26. [Google Scholar] [CrossRef]
- Conserve Energy Future. Available online: https://www.conserve-energy-future.com/advantages-and-disadvantages-of-electric-cars.php (accessed on 19 November 2022).
- Gao, Z.; Chin, C.S.; Chiew, J.H.K.; Jia, J.; Zhang, C. Design and Implementation of a Smart Lithium-Ion Battery System with Real-Time Fault Diagnosis Capability for Electric Vehicles. Energies 2017, 10, 1503. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, K.; Liu, K.; Lin, X.; Dey, S.; Onori, S. Advanced Fault Diagnosis for Lithium-Ion Battery Systems. TechRxiv 2020, preprint. [Google Scholar] [CrossRef]
- Xia, B.; Zheng, W.; Zhang, R.; Lao, Z.; Sun, Z. A Novel Observer for Lithium-Ion Battery State of Charge Estimation in Electric Vehicles Based on a Second-Order Equivalent Circuit Model. Energies 2017, 10, 1150. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Wu, J.; Chen, Z. A novel method for lithium-ion battery state of energy and state of power estimation based on multi-time-scale filter. Appl. Energy 2018, 216, 452–461. [Google Scholar] [CrossRef]
- Luo, L.; Zhang, C.; Tian, Y.; Liu, H. State-of-Health Estimate for the Lithium-Ion Battery Based on Constant Voltage Current Entropy and Charging Duration. World Electr. Veh. J. 2022, 13, 148. [Google Scholar] [CrossRef]
- Tudoroiu, R.-E.; Zaheeruddin, M.; Tudoroiu, N.; Radu, S.-M. SOC Estimation of a Rechargeable Li-Ion Battery Used in Fuel-Cell Hybrid Electric Vehicles—Comparative Study of Accuracy and Robustness Performance Based on Statistical Criteria. Part I: Equivalent Models. Batteries 2020, 6, 42. [Google Scholar] [CrossRef]
- Tudoroiu, N.; Zaheeruddin, M.; Tudoroiu, R.-E. Real Time Design and Implementation of State of Charge Estimators for a Rechargeable Li-ion Cobalt Battery with Applicability in HEVs/EVs-A comparative Study. Energies 2020, 13, 2749. [Google Scholar] [CrossRef]
- Sensata Technologies. Lithium Balance Battery Management Systems. Available online: https://lithiumbalance.com/applications (accessed on 19 November 2022).
- Alvarez, J.M.; Sachenbacher, M.; Ostermeier, D.; Stadlbauer, H.J.; Hummitzsch, U.; Alexeev, A. Analysis of the State of the Art on BMS; Everlasting D6.1 Report; Lion Smart GmbH: Munchen, Germany, 2017. [Google Scholar]
- Roderick, R. A Look inside Battery-Management Systems Electronic Design. 2015. Available online: http://electronicdesign.com/power/look-inside-battery-management-systems (accessed on 20 November 2022).
- Jung, S.; Jeong, H. Extended Kalman Filter-Based State of Charge and State of Power Estimation Algorithm for Unmanned Aerial Vehicle Li-Po Battery Packs. Energies 2017, 10, 1237. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, L. Research on the Thermal Characteristics of an 18650 Lithium-Ion Battery Based on an Electrochemical–Thermal Flow Coupling Model. World Electr. Veh. J. 2021, 12, 250. [Google Scholar] [CrossRef]
- Zhao, Y.; Zou, B.; Li, C.; Ding, Y. Active cooling-based battery thermal management using composite phase materials. In Proceedings of the 10th International Conference on Applied Energy (ICAE2018), Hong Kong, China, 22–25 August 2018; Volume 158, pp. 4933–4940. [Google Scholar] [CrossRef]
- Huria, T.; Ceraolo, M.; Gazzarri, J.; Jackey, R. High Fidelity Electrical Model with Thermal Dependence for Characterization and Simulation of High-Power Lithium Battery Cells. In Proceedings of the IEEE International Electric Vehicle Conference, Greenville, SC, USA, 8 April 2012. [Google Scholar] [CrossRef]
- Baronti, F.; Fantechi, G.; Fanucci, L.; Leonardi, E.; Roncella, R.; Saletti, R.; Saponara, S. State-of-Charge Estimation Enhancing of Lithium batteries through a Temperature–Dependent Cell Model. In Proceedings of the 2011 International Conference on Applied Electronics, Pilsen, Czech Republic, 7–8 September 2011; pp. 1–5. [Google Scholar]
- Nugroho, A.; Rijanto, E.; Wijaya, F.D.; Nugroho, P. Battery state of charge estimation by using a combination of Coulomb Counting and dynamic model with adjusted gain. In Proceedings of the 2015 International Conference on Sustainable Energy Engineering and Application (ICSEEA), Bandung, Indonesia, 5–7 October 2015; pp. 54–58. [Google Scholar] [CrossRef]
- Yuan, S.; Wu, H.; Yin, C. State of Charge Estimation Using the Extended Kalman Filter for Battery Management Systems Based on the ARX Battery Model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. A New Extension of the Kalman Filter to Nonlinear Systems. In Proceedings of the 11th International Symposium on Aerospace/Defence Sensing, Simulation and Controls, Orlando, FL, USA, 21–25 April 1997. [Google Scholar]
- Van der Merwe, R.; Wan, E.A. The square-root unscented Kalman filter for state and parameter-estimation. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing, Salt Lake City, UT, USA, 7–11 May 2001. [Google Scholar] [CrossRef]
- Jiani, D.; Youyi, W.; Changyun, W. Li-ion battery SOC estimation using particle filter based on an equivalent circuit model. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; pp. 580–585. [Google Scholar] [CrossRef]
- Aung, H.; Low, K.-S.; Soon, J.J. State-of-Charge Estimation Using Particle Swarm Optimization with Inverse Barrier Constraint in a Nanosatellite. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, T.; Wang, M.; Xiao, Q.; Wang, X. The SOC Estimation of Power Li-Ion Battery Based on ANFIS Model. Smart Grid Renew. Energy 2012, 3, 51–55. [Google Scholar] [CrossRef]
- Tudoroiu, R.-E.; Zaheeruddin, M.; Tudoroiu, N.; Radu, S.M. Smart Mobility—Recent Advances, New Perspectives and Applications; Sarwat, A., Khalid, A., Jalal, A.H., Eds.; Intech: Vienna, Austria, 2022; pp. 1–31. [Google Scholar] [CrossRef]
- Álvarez Antón, J.C.; García Nieto, P.J.; Blanco Viejo, C.; Vilán, J.A. Support Vector Machines Used to Estimate the Battery State of Charge. IEEE Trans. Power Electron. 2013, 28, 5919–5926. [Google Scholar] [CrossRef]
- Tudoroiu, N.; Zaheeruddin, M.; Tudoroiu, R.-E.; Radu, S.M. Wavelet Theory; Somayeh Mohammady; Intech: Vienna, Austria, 2020; pp. 1–37. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, K.; Liu, K.; Lin, X.; Dey, S.; Onori, S. Advanced Fault Diagnosis for Lithium-Ion Battery Systems: A Review of Fault Mechanisms, Fault Features, and Diagnosis Procedures. IEEE Ind. Electron. Mag. 2020, 14, 65–91. [Google Scholar] [CrossRef]
- Dey, S.; Mohon, S.; Pisu, P.; Ayalew, B. Sensor Fault Detection, Isolation, and Estimation in Lithium-Ion Batteries. IEEE Trans. Control Syst. Technol. 2016, 24, 2141–2149. [Google Scholar] [CrossRef]
- MathWorks Documentation. Fault Detection Using a Kalman Filter. 2023. Available online: https://www.mathworks.com/help/predmaint/ug/Fault-Detection-Using-an-Extended-Kalman-Filter.html (accessed on 28 April 2023).
- MathWorks MATLAB Version R2023a Online Documentation. Fit Data with a Shallow Neural Network. Available online: https://www.mathworks.com/help/deeplearning/gs/fit-data-with-a-neural-network.html (accessed on 29 March 2023).
- Tudoroiu, N.; Zaheeruddin, M.; Tudoroiu, R.-E.; Radu, M.S.; Chammas, H. Intelligent Deep Learning Estimators of a Lithium-Ion Battery State of Charge Design and MATLAB Implementation—A Case Study. Vehicles 2023, 5, 535–564. [Google Scholar] [CrossRef]
- MathWorks Documentation. Identify Condition Indicators for Predictive Maintenance Algorithm Design. 2023. Available online: https://www.mathworks.com/help/predmaint/gs/identify-condition-indicators-for-predictive-maintenance-algorithm-design.html (accessed on 28 April 2023).
- MathWorks Documentation. Long-Short Term Memory (LSTM). 2023. Available online: https://www.mathworks.com/discovery/lstm.html (accessed on 30 April 2023).
- MathWorks Documentation. Sequence Classification Using Deep Learning. Available online: https://www.mathworks.com/help/deeplearning/ug/classify-sequence-data-using-lstm-networks.html (accessed on 1 May 2023).
- MathWorks Documentation. Long Short-Term Memory Neural Networks. 2023. Available online: https://www.mathworks.com/help/deeplearning/ug/long-short-term-memory-networks.html (accessed on 1 May 2023).
- MathWorks Documentation. Sequence-to-one Regression Using Deep Learning. 2023. Available online: https://www.mathworks.com/help/deeplearning/ug/sequence-to-one-regression-using-deep-learning.html (accessed on 4 May 2023).
- MathWorks Documentation. Sequence-to-sequence regression Using Deep Learning. 2023. Available online: https://www.mathworks.com/help/deeplearning/ug/sequence-to-sequence-regression-using-deep-learning.html (accessed on 4 May 2023).



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Baseline | RMSE | MSE | MAE | Std |
|---|---|---|---|---|
| Model SOC vs. SOC AEKF | 0.063 | 1.06 × 10−6 | 0.001 | 0.044 (AEKF) |
| Vbat | SOC | Code | State |
|---|---|---|---|
| Healthy | Healthy | 0 | H |
| Faulty | Faulty | 1 | |
| Faulty | Healthy | 2 | |
| Healthy | Faulty | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tudoroiu, N.; Zaheeruddin, M.; Tudoroiu, R.-E.; Radu, M.S.; Chammas, H. Investigations on Using Intelligent Learning Techniques for Anomaly Detection and Diagnosis in Sensors Signals in Li-Ion Battery—Case Study. Inventions 2023, 8, 74. https://doi.org/10.3390/inventions8030074
Tudoroiu N, Zaheeruddin M, Tudoroiu R-E, Radu MS, Chammas H. Investigations on Using Intelligent Learning Techniques for Anomaly Detection and Diagnosis in Sensors Signals in Li-Ion Battery—Case Study. Inventions. 2023; 8(3):74. https://doi.org/10.3390/inventions8030074
Chicago/Turabian StyleTudoroiu, Nicolae, Mohammed Zaheeruddin, Roxana-Elena Tudoroiu, Mihai Sorin Radu, and Hana Chammas. 2023. "Investigations on Using Intelligent Learning Techniques for Anomaly Detection and Diagnosis in Sensors Signals in Li-Ion Battery—Case Study" Inventions 8, no. 3: 74. https://doi.org/10.3390/inventions8030074
APA StyleTudoroiu, N., Zaheeruddin, M., Tudoroiu, R.-E., Radu, M. S., & Chammas, H. (2023). Investigations on Using Intelligent Learning Techniques for Anomaly Detection and Diagnosis in Sensors Signals in Li-Ion Battery—Case Study. Inventions, 8(3), 74. https://doi.org/10.3390/inventions8030074