2.1. Problems and Requirements
According to the Nanosatellite and CubeSat database [
24], 3163 out of 3627 nanosatellites are CubeSat satellites with the U design shape, and 41% of these satellites are designed in 3U size, as summarized in
Figure 2 [
24].
The problems for a gripper design and operation in berthing tasks with CubeSat satellites (in short CubeSats) can be summarized as follows:
Geometry-based grasping of CubeSats;
Keeping the CubeSat after grasping;
Minimization of mass and inertial characteristics of the gripper;
Lightweight and low-cost solution for terrestrial testing.
In previous works [
25,
26], geometry-based grasping is planned along CubeSats’ diagonal ribs by using L-shaped fingertips. In general, CubeSats are not designed with docking or berthing ports, but their shape and dimensions are standardized. A gripper design can be based on its geometry so that a standard grasping can be planned for these types of satellites.
After grasping, a CubeSat should be firmly kept by the gripper and not slip out from its fingertips while being transferred to the berthing port. The grasping force in this case should be large enough to keep the CubeSat and to avoid its slip, but small enough to not damage it. The berthing operation outlined in [
25,
26], also considers keeping multiple satellites on the base station and using one manipulator only. Therefore, berthing ports based on CubeSats’ geometry are required to be on the base station. Around half of CubeSats use foldable structures such as solar panels or antennas. Unfolded elements of CubeSat can prevent it from being grasped or entering in the berthing port.
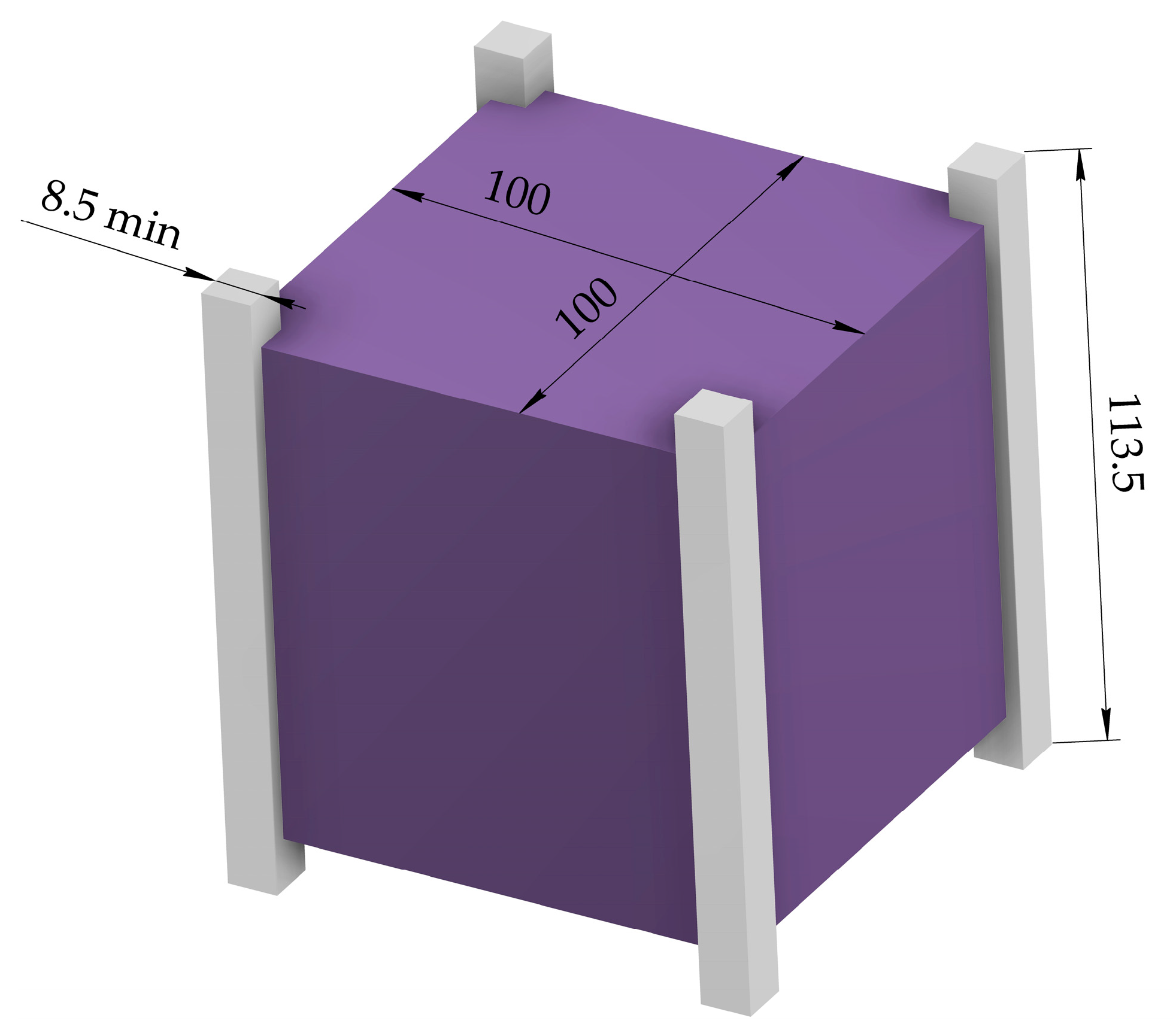
CubeSats’ body dimensions do not exceed 36 centimeters in size and 24 kg in mass [
21]. For such small satellites, both the manipulator and the gripper can be designed with suitable mass and dimensions and make the base station for maintaining CubeSats cost-efficient. Manipulators such as Canadarm2 [
4] with Dextre or ERA [
6], with their size, mass, and complexity, are overengineered for this task. Focusing on the berthing can help minimize the mass and inertia characteristics of the gripper. A folding gripper structure is one of the ways to reduce volume in the launcher spacecraft. To reduce development costs, a prototype for preliminary testing of grasping mechanics can be designed using low-cost materials and manufacturing techniques such as 3D-printing.
2.2. Grasping Analysis
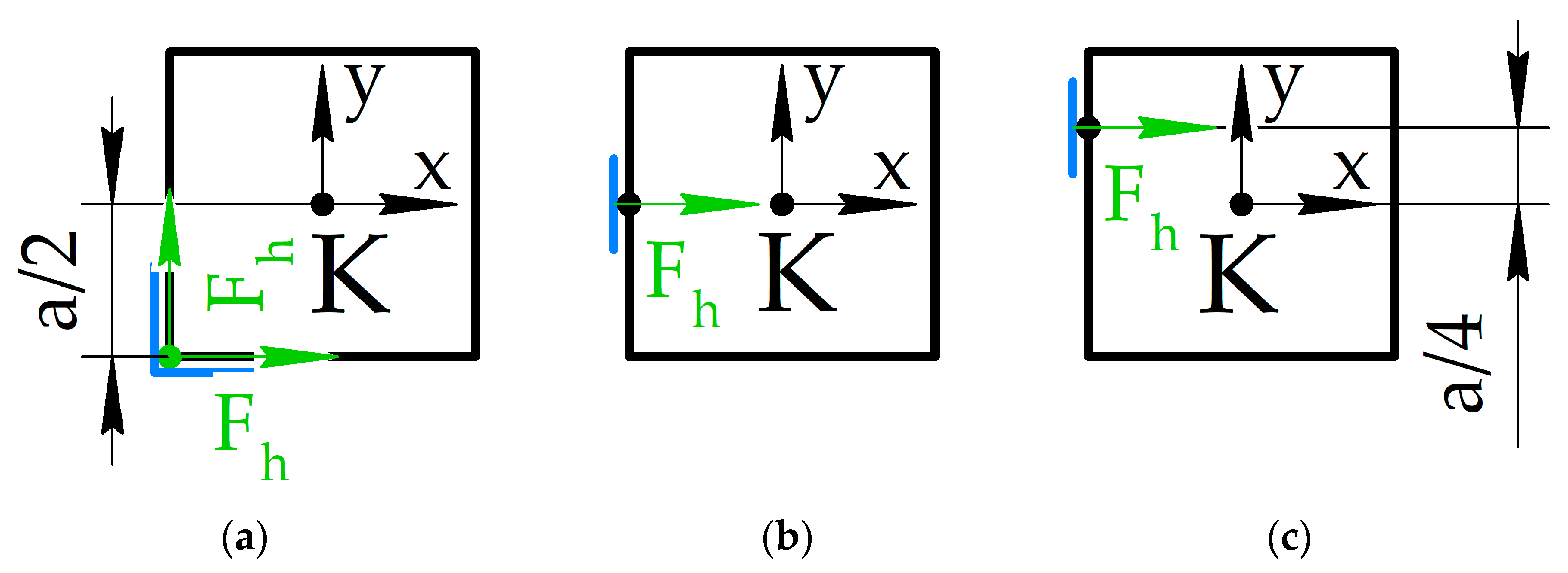
To find a suitable gripper configuration, a typical static planar task is presented in
Figure 2 in different ways of contact between the grasped body and the gripper fingertip. A square-shaped CubeSat is considered as a grasped body in the presented berthing task. The mass center K with the coordinate system Kxy is placed in the center of the square with the side equal to a. It is assumed that a CubeSat is in contact with fingertips with forces F
h from the grasping surface. Three types of contact can be considered in this task as summarized in
Figure 3. The first is an L-shaped fingertip presented in
Figure 3a in which contacts with the grasped body are in its corner. The grasping forces F
h to act from the contact point along the sides of the grasped body. The planar fingertip grasping by the middle of the side of the body is presented in
Figure 3b with the force F
h. The planar fingertip contact by the edge of the side of the body with the force F
h is shown in
Figure 3c.
These types of contact can be used in different combinations and are applied to the different corners and sides of the grasped body. According to [
17], static equilibrium can be ensured with only two contact points. The sum of forces and moments acting on the body is equal to zero, which is a representation of the equilibrium condition.
To balance the forces, two similar fingertips should act to the opposite sides of the grasped body. For example, two L-shaped fingertips from
Figure 3a should act on the opposite corners of the grasped body, as shown in
Figure 4a. The same condition is applied for the fingertips in
Figure 3b,c, which is given in
Figure 4b,c, respectively.
Different combinations give unbalanced forces or moments acting on the grasped body. The static equilibrium conditions for three means of contact for fingertips from
Figure 4a–c, named FT3a, FT3b, and FT3c, respectively, can be expressed as follows.
In Equations (1)–(3), the grasping forces Fhx and Fhy keep the grasped body inside, i.e., between the two fingertips. This configuration is useful also because the ribs of the body are considered rigid, and it is possible to apply large Fh to ensure that the object retains its grasping configurations.
On the other hand, grasping configurations with fingertip contacts on the cube sites, as in
Figure 4b,c are not always possible because of sensors or solar panels installed on CubeSat’s surfaces.
In this work, a mathematical model is proposed for a task formulation considering the space environment, i.e., the low gravity and typical slow motion in space systems; therefore, dynamic and inertia effects are not considered; only the static equilibrium formulation is worked out. Future work will address the related stability issues that might be observed during operation with a complete dynamic model.
The solution for planar grasping from previous work [
26] is based on the concept of grasping by diagonals, as shown in
Figure 5a. The limitations of the proposed grasping method are explained in the following. The grasping zone is limited by the l borders of the fingertips. The central line connecting their corners is identified by a bisector of an angle between the fingertips’ sides. For convenience, the coordinate system is set along one of the diagonals of the grasped body. The deviation h and the angle α are used to identify the grasping zone. A body can be grasped if two of its counter diagonals are inside in the grasping zone. The deviation h is measured as the difference between the gripper center and the grasped body center along the h vertical axis. The angle α is measured as the angle between two lines, one of which connects the corners of the fingertips, the other is a diagonal of a grasped body. Four points in
Figure 5b represent maximum deviations for feasible grasps, namely, two of them for linear deviation, and two others are for angular deviation. For a square-shaped grasped body with its side equal to a, the diagonal is equal to
. The width of a grasping zone with the fingertip corner side equal to l is equal to
, where l < a. The linear deviation h corresponds to half of this width in both directions, so the maximum deviations h*
s and −h*
s are equal
and
, respectively. When rotating the grasped body around the center, its counter-diagonals touch borders of the grasping zone, and a right triangle can be drawn with a hypotenuse equal to a diagonal of the grasped body, and the shortest side of a triangle is equal to the width of the grasping zone. The ratio between the width of the grasping zone and the diagonal of the grasped body is equal to the sine of an angular deviation; therefore, the maximum angular deviation α can be represented as arcsine of this ratio given by
Likewise in Equation (10), it holds .
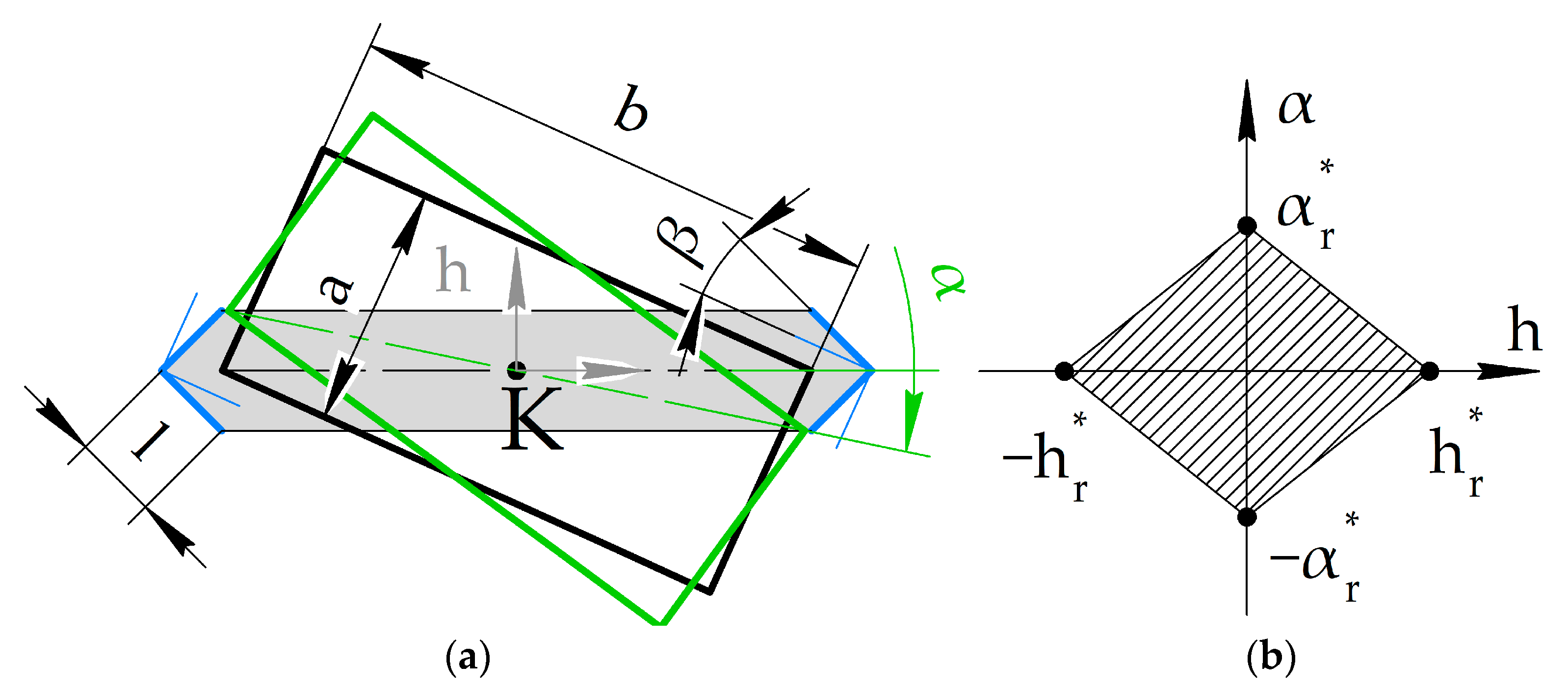
The same method can be used to explain the linear and angular deviations for rectangular-shaped grasped bodies with sides equal to a and b, as shown in
Figure 6a. The h-axis is placed perpendicularly to one of the diagonals of the grasped body. The diagonal d for the grasped body can be found via the Pythagorean theorem, as
. Maximal linear deviation for the rectangular grasped body h*
r in
Figure 6b remains the same as in the previous case for a square-shaped body, i.e.,
. Angular deviation α*
r can be presented as a ratio between the grasping zone width and the grasped body diagonal, as
For a square-shaped grasped body, diagonals are orthogonal to each other and at 45 degrees to both corresponding sides. Both fingertips are parallel to the sides of the grasped body, and the central line of the grasping zone is coplanar to the diagonal d of the grasped body. However, for the rectangular shaped body, as in
Figure 6, the diagonal divides the right angle between its sides into two nonequal angles. To comply with this diagonal, the fingertips should be able to rotate at angle β. As mentioned above, the angle between a central line and each side of a fingertip is equal to 45 degrees. The angle γ between the diagonal of the rectangular grasped body and their sides a and b can be computed as the arctangent function between its sides, or
. The angle β is a difference between 45 degrees and this function, as
CubeSats 1U–3U and 12U correspond to this last case of study. For grasping rectangular shaped CubeSats 6U, the fingertips should be adaptive and rotate by angle β. Using Equations (10)–(12), numerical results for linear h and angular α deviations can be computed as listed in
Table 1 for the L-shaped fingertips with a side equal to 25 mm.
2.3. Gripper Kinematic Scheme
For the grasping configurations in
Figure 5 and
Figure 6, a novel gripper design is proposed to grasp different types of CubeSat from 1U to 12U. In previous works [
25,
26], the conceptual design has been presented as based on a double slider-crank mechanism, as shown in
Figure 7 with the two configurations opened and closed. In the opened configurations, the distance between fingertips corners d
max is set to be 5% larger than the diagonal of the largest CubeSat 12U for a compact design, or 336.0 mm. For the closed configurations, the distance d
min is set 1% lower than the diagonal of the smallest CubeSat 1U, or 140.0 mm, to ensure grasping. In
Figure 7, a general configuration of a mechanism is presented with the distance d/2 from the center of the mechanism to the one of the fingertips. For the gripper design, a distance p equal to 25 mm is set between the fingertip corner C
1 or C
2 and the crank end B
1 and B
2, respectively. In the opened configuration, the distance l
0 is the lengths sum of two cranks OA
1 and A
1B
1 for the first finger or OA
2 and A
2B
2 for the second finger. In the closed position, the mechanism becomes the right triangle, where the crank A
1B
1 with the length l
2 is the hypotenuse, and the crank OA
1 is one of the catheti. The distance l
0 becomes another cathetus of the right triangle in the closed configuration. Length l
0 is equal to d/2 minus h, and it is known in opened and closed configurations of the gripper. Then lengths l
1 and l
2 of cranks can be found by solving the geometry of the mechanism configuration given by
The length l1 calculated by Equation (13) is equal to 64.4 mm, and the length l2 is equal to 78.6 mm. These lengths are used as crank lengths in the CAD design of the gripper prototype.
The singularities of the slider-crank mechanism, corresponding to its fully extended or retracted configurations, are here avoided by operating the mechanism in its singularity-free range. This is physically ensured by dimensioning the slider to physically constrain its motion range.
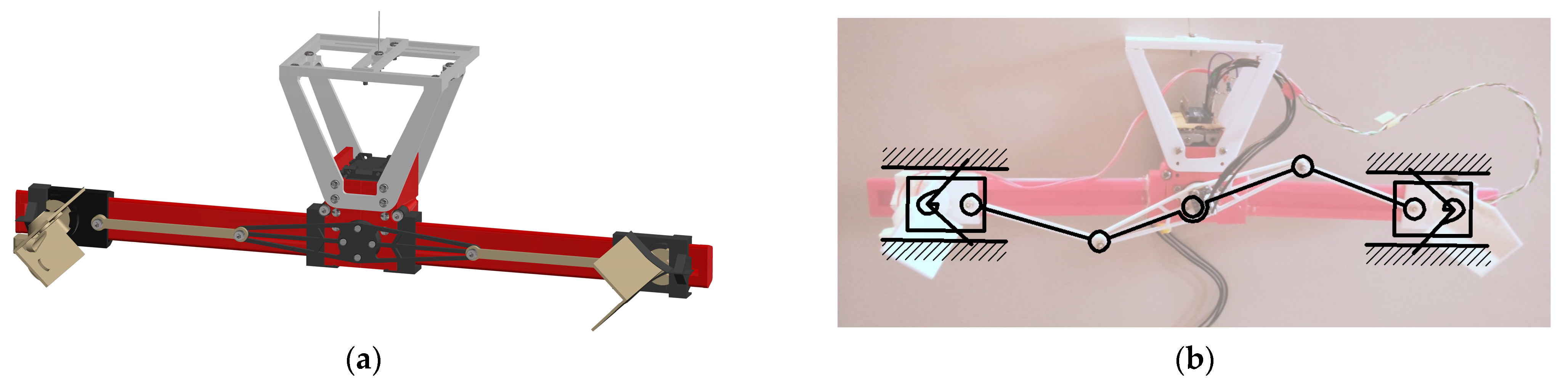
2.4. Gripper CAD Design
The CAD design of the built prototype is presented in
Figure 8a. A simplified gripper model from [
26] has been redesigned for 3D printing and testing as a lab prototype, as shown in
Figure 8b, with all the components that are manufactured in PLA. For the input actuation, a servomotor Dynamixel AX-12A [
27] has been chosen. The model of this motor is covered by two parts, which protect the motor from external conditions and are used as basis for other parts. Two rails—180 mm long and 20 mm maximum width—are used for translational movement of the fingers. The rails have a trapezoidal profile and a place for ball bearings to keep the fingers. They are inserted into the pockets that are adjusted to the enclosures of the motor. The pockets are designed to fold the gripper rails and keep them unfolded when the gripper is in use. The fingers consist of three parts, such as the car, the fingertip, and the cap with flexible elements. The car is 40 mm long, its profile repeats the profile of the rail with the gap 0.2 mm, and it has sockets for six ball bearings from each side. It has a hole for the crank and a socket for the fingertip. This socket is designed with a restrictor that limits the free rotation of the fingertip by 21.16 degrees clockwise and counterclockwise. The L-shaped fingertips are designed on a cylindrical platform with a diameter of 20 mm. The 25 mm wide and 70 mm long sides of the fingertip are placed 90 degrees with respect to each other. The central crank is double the length l
1, or 128.8 mm, and the lengths of two other cranks are equal to l
2, or 78.6 mm.
For laboratory testing, an adjustable support has been designed. When sensors are installed on fingertips, the center of the mass can slightly move from the initial position. The platform allows the device to hang and manually center the gripper along two axes in 70 × 43 mm range.
2.5. Testing Design and Modes
The lab gripper prototype is made from the CAD model from
Figure 7. The parts are printed in PLA material with 20% grid infill. The tolerances between the moving parts are 0.2 mm. Flexible elements are taken off to reduce resistance and friction for better adjustment of a fingertip during contact with the grasped body. The final mass of the printed prototype with the installed Arduino board is 215 grams.
In
Figure 9, the grasped body is a cardboard box 210 mm × 210 mm × 50 mm, which is close to the dimensions of CubeSat 12U. The larger surface 210 mm × 210 mm is placed parallel to the gripper mechanism. The distance between the central gripper link and the surface of the gripped body is set to 40 mm. The mass of the box is 160 g.
The Dynamixel AX-12A motor of a gripper is powered by an external 11.1 V power supply and controlled by the U2D2 computer interface. The motor is controlled by the software Dynamixel Wizard 2.0. It allows the device to control the speed, torque, limit rotation angles, and obtain real-time data, such as current usage and present position. Grasping is performed by movements of the motor, which are manually controlled by the Dynamixel Wizard 2.0 software.
To measure impact during grasping operation, two inertial measurement unit (IMU) sensors BMI160 and two force sensor resistors FSR-400 are installed on the gripper. FSR-400 [
28] can measure the forces from 0.2 N to 20 N with a sensing circular area of 5.6 mm diameter. BMI160 [
29] is the inertial measurement unit sensor (IMU), consisting of a gyroscope and a 3-axis accelerometer. The gyroscope can measure up to 2000 deg/s, and the accelerometer range is up to 16 g. The sensor BMI160 is installed on the module GY-BMI160 to communicate with the Arduino board.
Two force sensors are positioned in one fingertip. The first force sensor is placed on the fingertip inner surface at 20 mm from the top of the fingertip and 10 mm from its long side. The second force sensor is placed on the inner surfaces of the fingertip on the same distance from its top. The central IMU sensor is placed on the center of the central frame link of the gripper driving mechanism. Another IMU is placed on the outer side of the fingertip at 8 mm from the bottom rib of the fingertip. The experimental set up is shown in
Figure 8b and
Figure 9a with the sensored prototype shown in
Figure 9b.
Two force sensors are placed at the fingertip and measure the contact forces when grasping. One force sensor is set between the sides of the fingertip. The ribs of the carton box are with the 1 mm radius, and a small platform is designed to transmit contact forces from this rib to the sensor. Another fingertip is on one side of the fingertip; the coordinates of its center are 20 mm from its top and 15 mm from the edge. If the grasping is successful, the surface of the box touches it and a contact is registered. Another contact platform on the side of the fingertip is used to transmit distributed forces to the small surface of a force sensor.
Force sensor resistors, which are named FSR in
Figure 9, are used to register the existence of a contact but not for the precise measurements. However, sensor calibration has been conducted using reference weights and the Arduino board. The datasheet [
28] shows nonlinear resistance or conductance. The sensor was connected to an analog pin of Arduino with 10K Ohm resistor, and the data were acquired as a signal from 0 to 1023. The function of the form y = k
1/(x + k
2) + k
3, where k
1 = −1000, k
2 = −1023, and k
3 = −0.97 are the empirical coefficients, was applied to the acquired data to convert them into Newtons.
Arduino Nano Every is used to acquire the data from the IMU and force sensors. It is installed on the gripper below the support platform. I2C connection is used to acquire the data from the IMU sensors; three components of angular velocities and three components of linear acceleration are taken from each sensor. Two components of force data are taken from the force sensor resistors. The frequency of acquiring data for 14 components in total is 15 Hz, with the 115,200 baud rate set on the Arduino board.
The test is planned in grasping a CubeSat-like object of representative shape and size, holding it for a period of time, and releasing it. At the beginning, the gripper is opened at 160 degrees. To grasp the object, the gripper is closed at 138 degrees and keeps this position to hold it. The commands of grasping and releasing are given by a user using Dynamixel Wizard 2.0 software. The full operation time takes about 8.5 s, similar to a berthing operation with a CubeSat in space, and this time can be considered enough to observe the successful operation and behavior of the system, including gripper oscillations together with the grasped body.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}