
Review of Key Technologies of Rotary-Wing Mars UAVs for Mars Exploration


Abstract
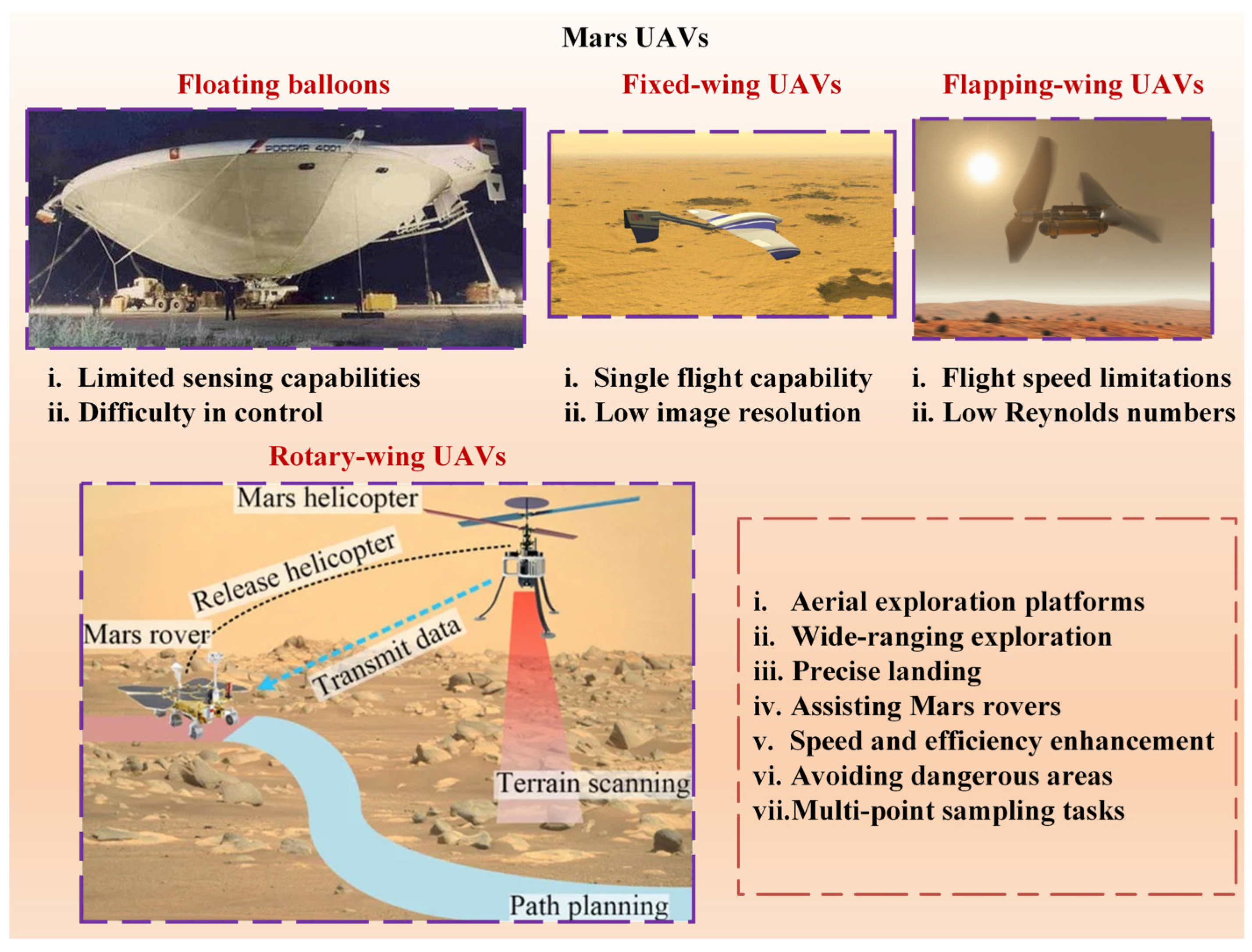
:1. Introduction
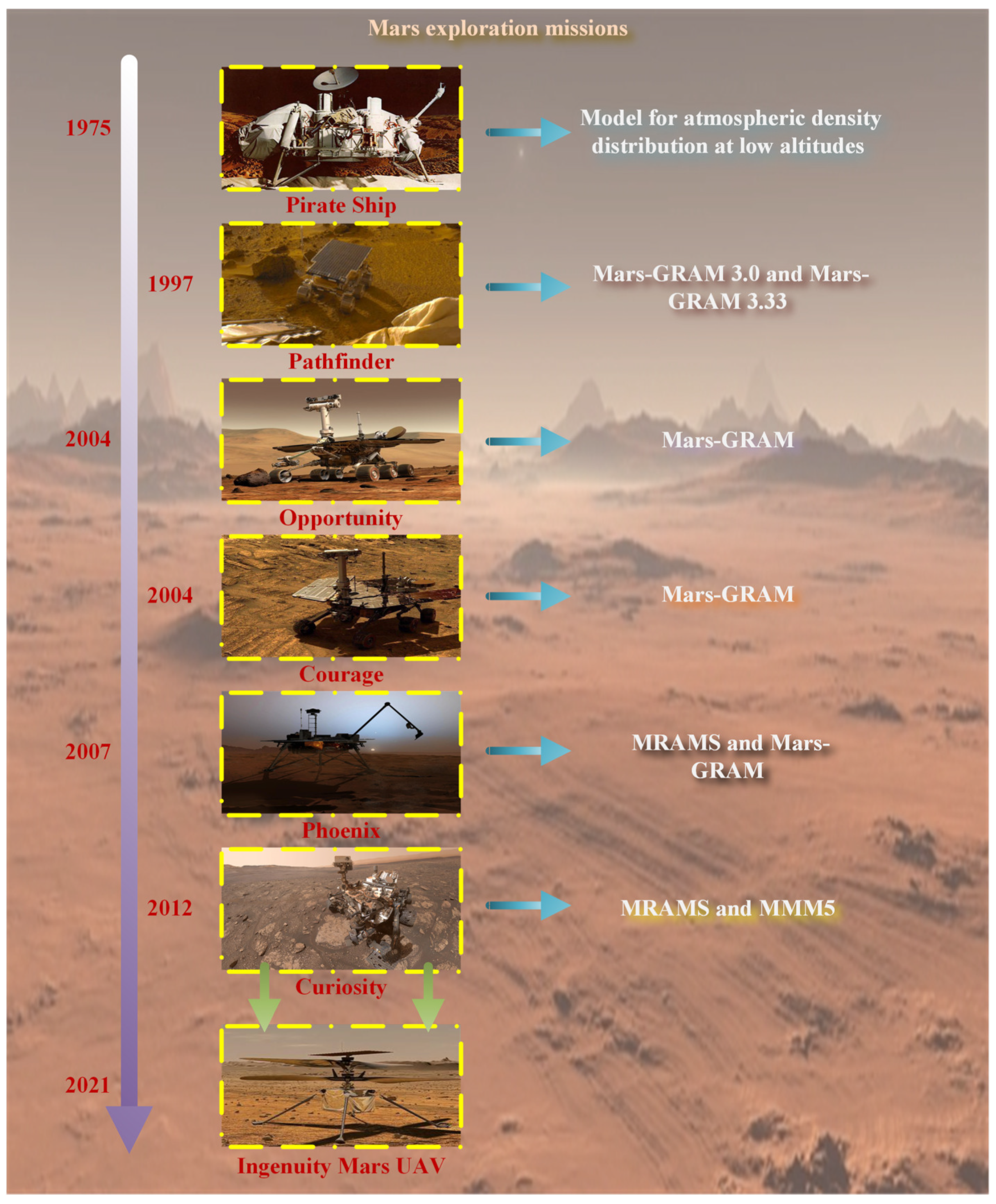
2. Mars Near-Surface Atmospheric Environment
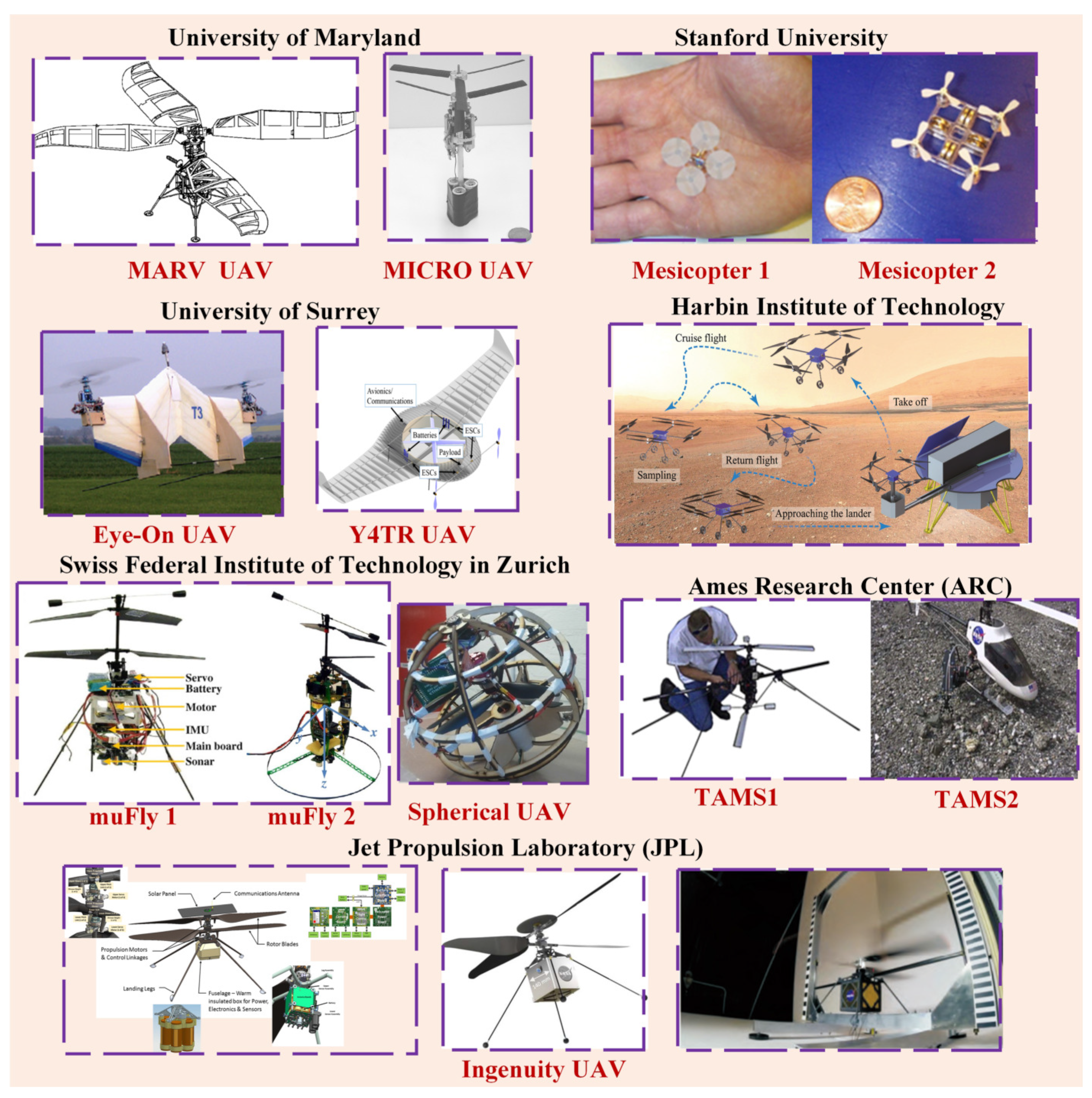
3. Development of Rotary-Wing Mars UAVs
3.1. The University of Maryland
3.2. Stanford University
3.3. University of Surrey
3.4. Harbin Institute of Technology
3.5. Swiss Federal Institute of Technology in Zurich
3.6. The Ames Research Center
3.7. The Jet Propulsion Laboratory
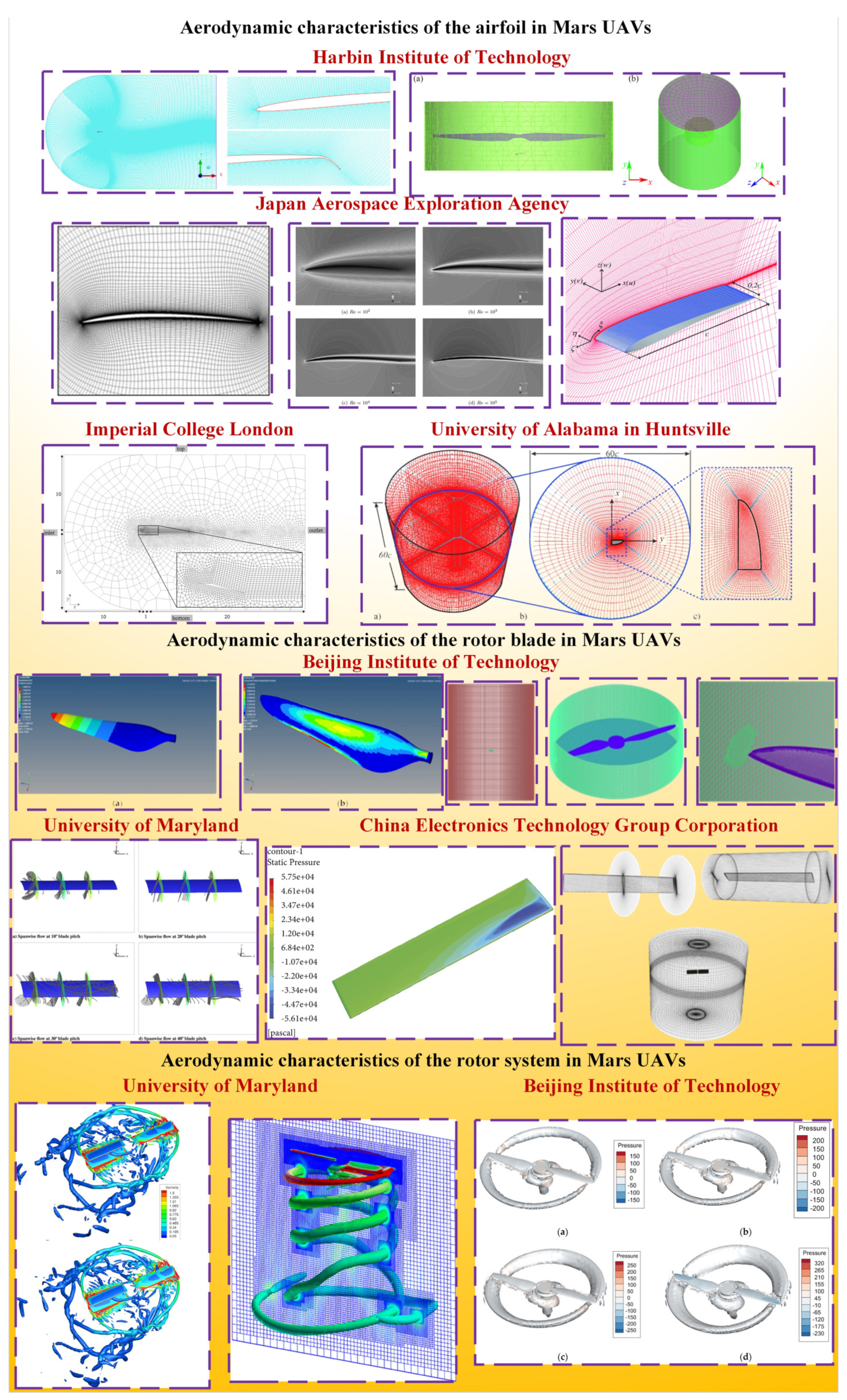
4. Progress in Aerodynamic Characteristics of Mars UAV Rotor System
4.1. Research on Aerodynamic Characteristics of Rotor System
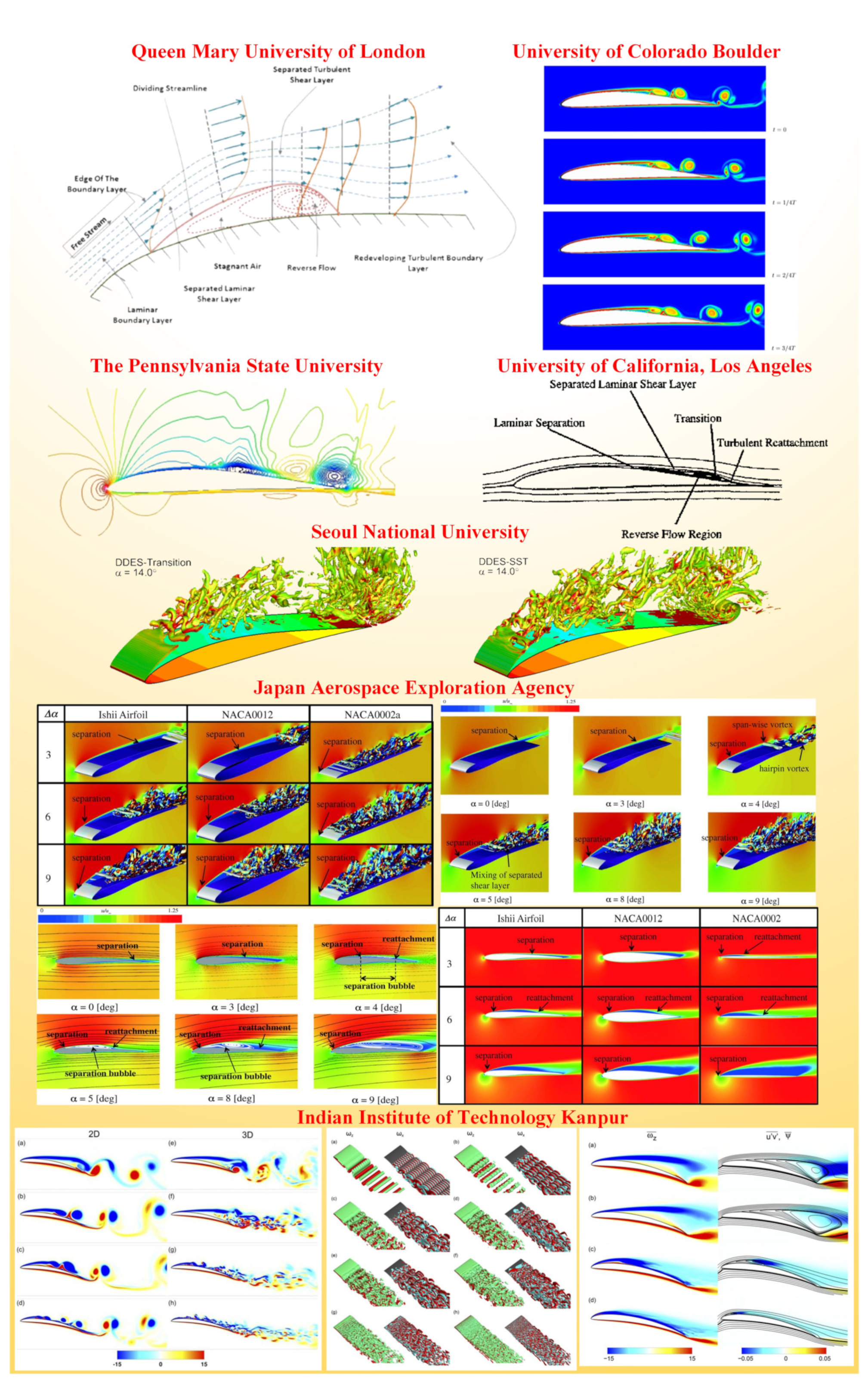
4.2. Research on Rotor Surface Boundary Layer Separation Phenomenon
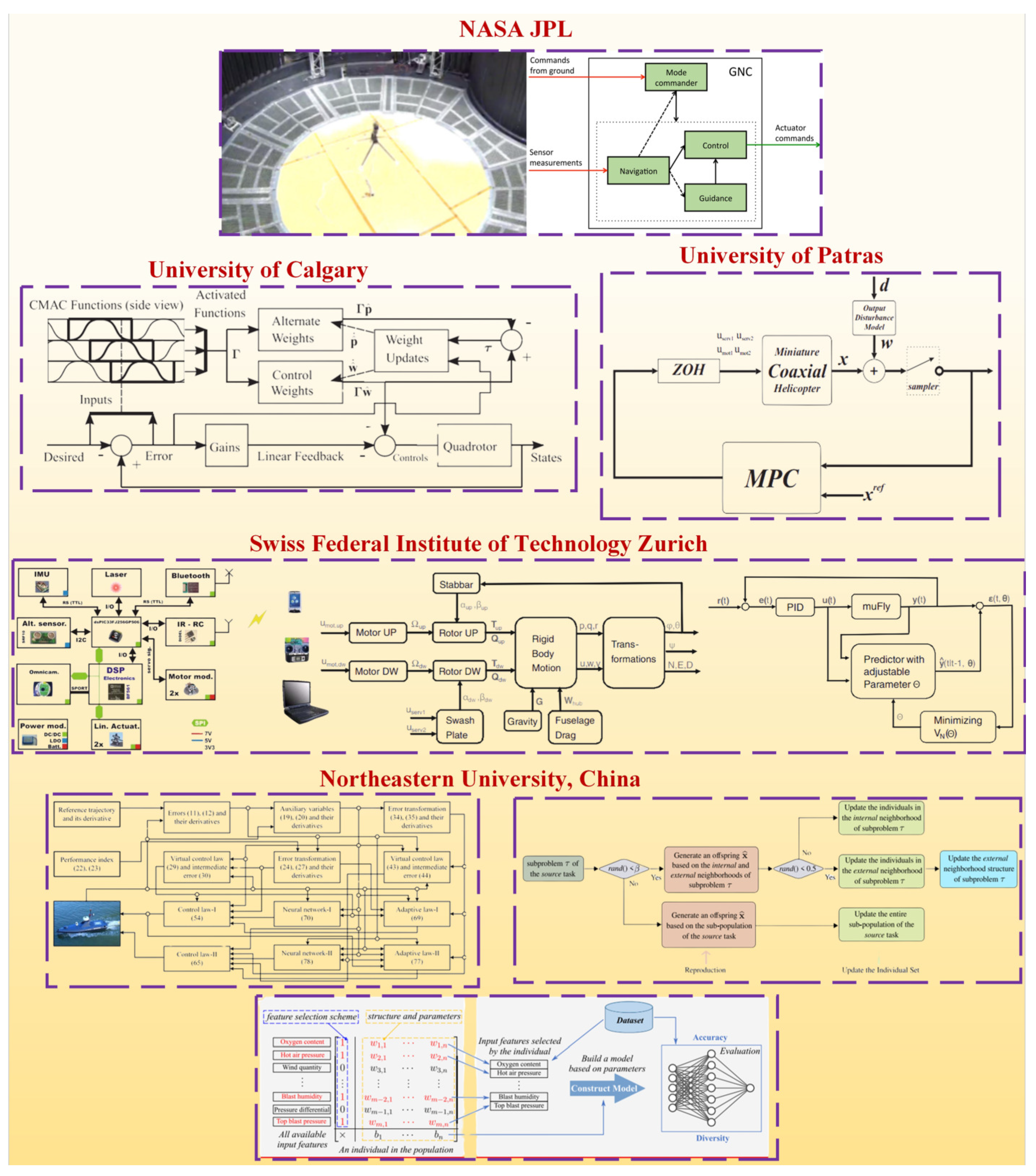
5. Research on Control Methods of Rotary-Wing Mars UAVs
6. Experiments on Hover Performance in Rotary-Wing Mars UAVs
6.1. Mars Atmospheric Environment Simulation Setups
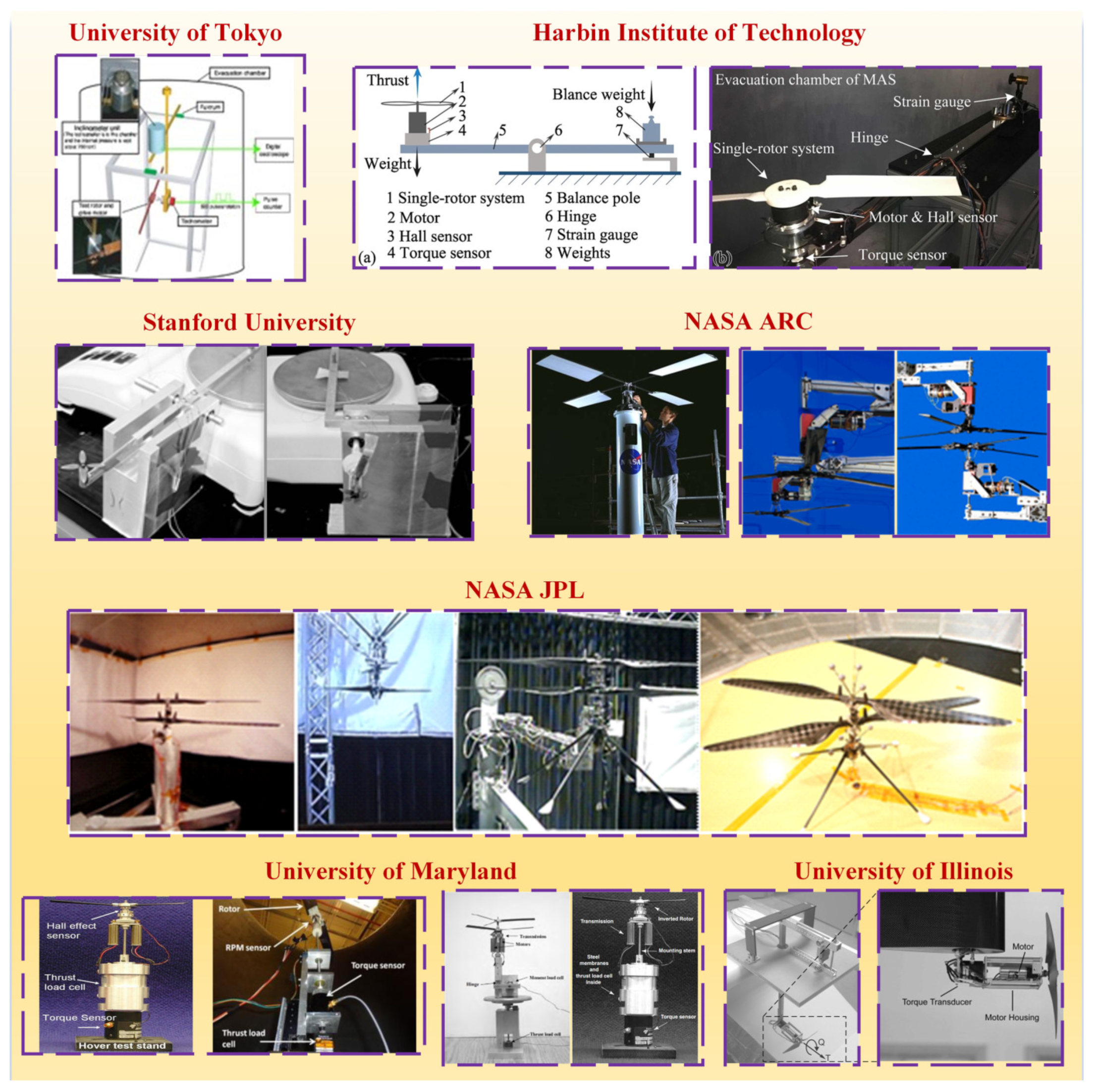
6.2. Experimental Setup for Hover Test of Rotary-Wing Mars UAVs
6.3. Experiments on Hover Test of Rotary-Wing Mars UAVs
7. Conclusions and Future Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, C.; Zhang, R.; Yu, D.; Dong, G.; Liu, J.; Geng, Y.; Sun, Z.; Yan, W.; Ren, X.; Su, Y.; et al. China’s Mars exploration mission and science investigation. Space Sci. Rev. 2021, 217, 57. [Google Scholar] [CrossRef]
- Zou, Y.; Zhu, Y.; Bai, Y.; Wang, L.; Jia, Y.; Shen, W.; Fan, Y.; Liu, Y.; Wang, C.; Zhang, A.; et al. Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission. Adv. Space Res. 2021, 67, 812–823. [Google Scholar] [CrossRef]
- Ye, P.J.; Peng, J. Deep space exploration and its prospect in China. Eng. Sci. 2006, 8, 13–18. [Google Scholar]
- Wright, M.; Edquist, K.; Tang, C.; Hollis, B.; Krasa, P.; Campbell, C. A review of aerothermal modeling for Mars entry missions. In Proceedings of the 48th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010; p. 443. [Google Scholar]
- Reynier, P. Survey of aerodynamics and aerothermodynamics efforts carried out in the frame of Mars exploration projects. Prog. Aerosp. Sci. 2014, 70, 1–27. [Google Scholar] [CrossRef]
- Ouyang, Z.; Xiao, F. Major scientific issues involved in Mars exploration. Spacecr. Environ. Eng. 2011, 28, 205–217. [Google Scholar]
- Wan, W.; Wang, C.; Li, C.; Wei, Y. China’s first mission to Mars. Nat. Astron. 2020, 4, 721. [Google Scholar] [CrossRef]
- Hall, J.; Pauken, M.; Kerzhanovich, V.; Walsh, G.; Fairbrother, D.; Shreves, C.; Lachenmeier, T. Flight test results for aerially deployed Mars balloons. In Proceedings of the AIAA Balloon Systems Conference, Virtual, 21–24 May 2007; p. 2626. [Google Scholar]
- Braun, R.D.; Wright, H.S.; Croom, M.A.; Levine, J.S.; Spencer, D.A. Design of the ARES Mars airplane and mission architecture. J. Spacecr. Rocket. 2006, 43, 1026–1034. [Google Scholar] [CrossRef]
- Young, L.A.; Aiken, E.W.; Derby, M.; Johnson, J.; Navarrete, J.; Klem, J.; Demblewski, R.; Andrews, J.; Torres, R. Engineering Studies into Vertical Lift Planetary Aerial Vehicles; Technical Report; National Aeronautics and Space Administration Moffett Field CA Rotorcraft: Santa Clara County, CA, USA, 2002.
- Bar-Cohen, Y.; Colozza, A.; Badescu, M.; Sherrit, S.; Bao, X. Biomimetic flying swarm of entomopters for Mars extreme terrain science investigations. Concepts Approaches Mars Explor. 2012, 1679, 4075. [Google Scholar]
- Shi, J.; Zhang, Z.; Liu, Z.; Wang, Y. An analysis of results of the Martian environment exploration. Prog. Geophys. 1997, 12, 98–108. [Google Scholar]
- Cheng, X.; Li, J.; Wang, Q. Aerodynamic force characteristics of Mars entry vehicles. J. Astronaut. 2010, 31, 967–972. [Google Scholar]
- Patel, A.; Karlsson, S.; Lindqvist, B.; Kanellakis, C.; Agha-Mohammadi, A.A.; Nikolakopoulos, G. Towards energy efficient autonomous exploration of Mars lava tube with a Martian coaxial quadrotor. Adv. Space Res. 2023, 71, 3837–3854. [Google Scholar] [CrossRef]
- Witze, A. Mars helicopter kicks up dust cloud—and unexpected science. Nature 2021, 594, 484. [Google Scholar] [CrossRef]
- Folsom, L.; Ono, M.; Otsu, K.; Park, H. Scalable information-theoretic path planning for a rover-helicopter team in uncertain environments. Int. J. Adv. Robot. Syst. 2021, 18, 1729881421999587. [Google Scholar] [CrossRef]
- Withrow, S.; Johnson, W.; Young, L.A.; Cummings, H.; Balaram, J.; Tzanetos, T. An advanced Mars helicopter design. In Proceedings of the ASCEND 2020, Virtual, 16–18 November 2020; p. 4028. [Google Scholar]
- Geminale, A.; Formisano, V.; Sindoni, G. Mapping methane in Martian atmosphere with PFS-MEX data. Planet. Space Sci. 2011, 59, 137–148. [Google Scholar] [CrossRef]
- Ouyang, Z.; Xiao, F. The Mars and its environment. Spacecr. Environ. Eng. 2012, 29, 591–601. [Google Scholar]
- Sharp, R.P. Mars: Troughed terrain. J. Geophys. Res. 1973, 78, 4063–4072. [Google Scholar] [CrossRef]
- Kass, D.; Kleinböhl, A.; McCleese, D.; Schofield, J.; Smith, M. Interannual similarity in the Martian atmosphere during the dust storm season. Geophys. Res. Lett. 2016, 43, 6111–6118. [Google Scholar] [CrossRef]
- Dong, C.; Lee, Y.; Ma, Y.; Lingam, M.; Bougher, S.; Luhmann, J.; Curry, S.; Toth, G.; Nagy, A.; Tenishev, V.; et al. Modeling Martian atmospheric losses over time: Implications for exoplanetary climate evolution and habitability. Astrophys. J. Lett. 2018, 859, L14. [Google Scholar] [CrossRef]
- Hall, D.W.; Parks, R.W. On the development of airborne science platforms for Martian exploration. In Proceedings of the Foundation of the Mars Society, Boulder, CO, USA, 3–16 August 1998. [Google Scholar]
- Forget, F.; Wordsworth, R.; Millour, E.; Madeleine, J.B.; Kerber, L.; Leconte, J.; Marcq, E.; Haberle, R.M. 3D modelling of the early martian climate under a denser CO2 atmosphere: Temperatures and CO2 ice clouds. Icarus 2013, 222, 81–99. [Google Scholar] [CrossRef]
- Kminek, G.; Rummel, J.; Cockell, C.; Atlas, R.; Barlow, N.; Beaty, D.; Boynton, W.; Carr, M.; Clifford, S.; Conley, C.; et al. Report of the COSPAR Mars special regions colloquium. Adv. Space Res. 2010, 46, 811–829. [Google Scholar] [CrossRef]
- Justh, H.; Justus, C.; Ramey, H. Mars-GRAM 2010: Improving the precision of Mars-GRAM. In Proceedings of the Fourth International Workshop on the Mars Atmosphere: Modelling and Observations, Paris, France, 8–11 February 2011. [Google Scholar]
- Justus, C.; Duvall, A.; Keller, V.W. Validation of Mars global reference atmospheric model (Mars-GRAM 2001) and planned new features. Adv. Space Res. 2006, 38, 2633–2638. [Google Scholar] [CrossRef]
- Millour, E.; Forget, F.; Spiga, A.; Navarro, T.; Madeleine, J.B.; Montabone, L.; Pottier, A.; Lefevre, F.; Montmessin, F.; Chaufray, J.Y.; et al. The Mars climate database (MCD version 5.2). In Proceedings of the European Planetary Science Congress, Nantes, France, 27 September–2 October 2015; Volume 10, pp. 2015–2438. [Google Scholar]
- Justus, C.; James, B.; Bougher, S.; Bridger, A.; Haberle, R.; Murphy, J.; Engel, S. Mars-GRAM 2000: A Mars atmospheric model for engineering applications. Adv. Space Res. 2002, 29, 193–202. [Google Scholar] [CrossRef]
- Dutta, S.; Karlgaard, C.D.; Kass, D.; Mischna, M.; Villar III, G.G. Postflight Analysis of Atmospheric Properties from Mars 2020 Entry, Descent, and Landing. J. Spacecr. Rocket. 2023, 60, 1022–1033. [Google Scholar] [CrossRef]
- Yanes, N.J. Ultraviolet Radiation of Hypervelocity Stagnation Flows and Shock/Boundary-Layer Interactions; California Institute of Technology: Pasadena, CA, USA, 2020. [Google Scholar]
- Rafkin, S.; Michaels, T. The Mars regional atmospheric modeling system (MRAMS): Current status and future directions. Atmosphere 2019, 10, 747. [Google Scholar] [CrossRef]
- Pla-García, J.; Rafkin, S.C.; Martinez, G.; Vicente-Retortillo, Á.; Newman, C.; Savijärvi, H.; de la Torre, M.; Rodriguez-Manfredi, J.; Gómez, F.; Molina, A.; et al. Meteorological predictions for Mars 2020 Perseverance Rover landing site at Jezero crater. Space Sci. Rev. 2020, 216, 148. [Google Scholar] [CrossRef]
- Rhew, R.; Guynn, M.; Yetter, J.; Levine, J.; Young, L. Planetary flight vehicles (PFV): Technology development plans for new robotic explorers. In Proceedings of the Infotech@ Aerospace, Isabela, Puerto Rico, 28 September 2005; p. 7132. [Google Scholar]
- Karpovich, E.; Gueraiche, D. A Solar Wing-Tail Martian Science UAV: Design Space Exploration. Russ. Aeronaut. 2023, 66, 1–8. [Google Scholar] [CrossRef]
- Datta, A.; Chopra, I.; Bao, J.; Gamard, O.; Griffiths, D.; Liu, L.; Pugliese, G.; Roget, B.; Sitamaran, J. The Martian Autonomous Rotary-Wing Vehicle (MARV); Alfred Gessow Rotorcraft Center, Department of Aerospace Engineering, University of Maryland: College Park, MA, USA, 2000; Volume 1. [Google Scholar]
- Bohorquez, F.; Samuel, P.; Sirohi, J.; Pines, D.; Rudd, L.; Perel, R. Design, analysis and hover performance of a rotary wing micro air vehicle. J. Am. Helicopter Soc. 2003, 48, 80–90. [Google Scholar] [CrossRef]
- Datta, A.; Roget, B.; Griffiths, D.; Pugliese, G.; Sitaraman, J.; Bao, J.; Liu, L.; Gamard, O. Design of a Martian autonomous rotary-wing vehicle. J. Aircr. 2003, 40, 461–472. [Google Scholar] [CrossRef]
- Shrestha, R.; Benedict, M.; Hrishikeshavan, V.; Chopra, I. Hover performance of a small-scale helicopter rotor for flying on Mars. J. Aircr. 2016, 53, 1160–1167. [Google Scholar] [CrossRef]
- Kroo, I.; Prinz, F.; Shantz, M.; Kunz, P.; Fay, G.; Cheng, S.; Fabian, T.; Partridge, C. The mesicopter: A miniature rotorcraft concept phase ii interim report. Stanf. Univ. 2000. [Google Scholar]
- Song, H. A Hybrid Martian VTOL UAV: Design, Dynamics and Control; University of Surrey: Surrey, UK, 2008. [Google Scholar]
- Forshaw, J.L.; Lappas, V.J. Architecture and systems design of a reusable Martian twin rotor tailsitter. Acta Astronaut. 2012, 80, 166–180. [Google Scholar] [CrossRef]
- Collins, N.S. System Design and Nonlinear State-Dependent Riccati Equation Control of an Autonomous Y-4 Tilt-Rotor Aerobot for Martian Exploration; University of Surrey: Surrey, UK, 2016. [Google Scholar]
- Zhao, P.; Zhao, Z.; Chen, S.; Quan, Q.; Li, H.; Bai, D.; Deng, Z. Design of experimental setups for evaluating hover performance of a Martian coaxial rotorcraft. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 1427–1432. [Google Scholar]
- Zhao, P.; Quan, Q.; Chen, S.; Yang, T.; Bai, D.; Tang, D.; Deng, Z. Geometry shape selection of NACA airfoils for Mars rotorcraft. Acta Astronaut. 2019, 157, 300–309. [Google Scholar] [CrossRef]
- Tang, D.; Tang, B.; Shen, W.; Zhu, K.; Quan, Q.; Deng, Z. On genetic algorithm and artificial neural network combined optimization for a Mars rotorcraft blade. Acta Astronaut. 2023, 203, 78–87. [Google Scholar] [CrossRef]
- Zhao, P.; Quan, Q.; Chen, S.; Tang, D.; Deng, Z. Experimental investigation on hover performance of a single-rotor system for Mars helicopter. Aerosp. Sci. Technol. 2019, 86, 582–591. [Google Scholar] [CrossRef]
- Zhu, K.; Quan, Q.; Wang, K.; Tang, D.; Tang, B.; Dong, Y.; Wu, Q.; Deng, Z. Conceptual design and aerodynamic analysis of a Mars octocopter for sample collection. Acta Astronaut. 2023, 207, 10–23. [Google Scholar] [CrossRef]
- Zhu, K.; Tang, D.; Quan, Q.; Lv, Y.; Shen, W.; Deng, Z. Modeling and experimental study on orientation dynamics of a Mars rotorcraft with swashplate mechanism. Aerosp. Sci. Technol. 2023, 138, 108311. [Google Scholar] [CrossRef]
- Wu, Q.; Tang, D.; Quan, Q.; Zhu, K.; Wu, Y.; Deng, Z. A directly coil-actuated cyclic pitch control based rotor: Design, modeling, and analysis. Aerosp. Sci. Technol. 2023, 140, 108423. [Google Scholar] [CrossRef]
- Schafroth, D.; Bermes, C.; Bouabdallah, S.; Siegwart, R. Modeling, system identification and robust control of a coaxial micro helicopter. Control Eng. Pract. 2010, 18, 700–711. [Google Scholar] [CrossRef]
- Bermes, C.; Bouabdallah, S.; Schafroth, D.; Siegwart, R. Design of the autonomous micro helicopter muFly. Mechatronics 2011, 21, 765–775. [Google Scholar] [CrossRef]
- Malandrakis, K.; Dixon, R.; Savvaris, A.; Tsourdos, A. Design and development of a novel spherical UAV. IFAC-PapersOnLine 2016, 49, 320–325. [Google Scholar] [CrossRef]
- Young, L.A.; Aiken, E.W. Vertical Lift Planetary Aerial Vehicles: Three Planetary Bodies and Four Conceptual Design Cases; Technical Report; National Aeronautics and Space Administration Moffett Field CA Rotorcraft: Santa Clara County, CA, USA, 2001.
- Young, L.A.; Aiken, E.; Derby, M.; Demblewski, R.; Navarrete, J. Experimental Investigation and Demonstration of Rotary-Wing Technologies for Flight in the Atmosphere of Mars; Technical Report; National Aeronautics and Space Administration Moffett Field CA Rotorcraft: Santa Clara County, CA, USA, 2002.
- Kahre, M.; Haberle, R.; Wilson, R.; Urata, R.; Steakley, K.; Brecht, A.; Bertrand, T.; Kling, A.; Batterson, C.; Hartwick, V.; et al. The NASA Ames legacy Mars global climate model: Radiation code error correction and new baseline water cycle simulation. Icarus 2023, 400, 115561. [Google Scholar] [CrossRef]
- Young, L.A.; Aiken, E.; Lee, P.; Briggs, G. Mars rotorcraft: Possibilities, limitations, and implications for human/robotic exploration. In Proceedings of the 2005 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2005; pp. 300–318. [Google Scholar]
- Braun, R.D.; Wright, H.S.; Croom, M.A.; Levine, J.S.; Spencer, D.A. The Mars airplane: A credible science platform. In Proceedings of the 2004 IEEE Aerospace Conference Proceedings (IEEE Cat. No. 04TH8720), Big Sky, MT, USA, 6–13 March 2004; Volume 1. [Google Scholar]
- D’Urso, S.J.; Tsai, K.; Chadha, P.; Hilton, H.H. A Systems Engineering Approach to the Conceptual Design of a Martian UAV. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 5 January 2016; p. 0214. [Google Scholar]
- Veismann, M.; Raffel, J.; Leipold, M.; Wanner, J.; Tosi, L.P.; Izraelevitz, J.; Devost, M.; Young, L.; Touma, T.; Shah, P.; et al. Study of Rotor-Jetpack-Wind Aerodynamic Interaction for Mid-Air Helicopter Delivery on Mars. In Proceedings of the 2023 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2023; pp. 1–16. [Google Scholar]
- Mannam, N.P.; Duba, P.K.; Sharma, D. Future of Planetary Exploration: Bioinspired Drones for Low Density Martian Atmosphere. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023; p. 1421. [Google Scholar]
- Chi, C.; Lumba, R.; Su Jung, Y.; Datta, A. Aeromechanical Analysis of a Next-Generation Mars Hexacopter Rotor. J. Aircr. 2022, 59, 1463–1477. [Google Scholar] [CrossRef]
- Balaram, B.; Canham, T.; Duncan, C.; Grip, H.F.; Johnson, W.; Maki, J.; Quon, A.; Stern, R.; Zhu, D. Mars helicopter technology demonstrator. In Proceedings of the 2018 AIAA Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 0023. [Google Scholar]
- Bayard, D.S.; Conway, D.T.; Brockers, R.; Delaune, J.H.; Matthies, L.H.; Grip, H.F.; Merewether, G.B.; Brown, T.L.; San Martin, A.M. Vision-based navigation for the NASA Mars helicopter. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1411. [Google Scholar]
- Balaram, J.; Aung, M.; Golombek, M.P. The ingenuity helicopter on the perseverance rover. Space Sci. Rev. 2021, 217, 56. [Google Scholar] [CrossRef]
- Anderson, J.L.; Karras, J.T.; Cacan, M.; Kubiak, G.; Pyrzak, G.; Dor, H.; Pipenberg, B. Ingenuity, One Year of Flying on Mars. In Proceedings of the 2023 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2023; pp. 1–18. [Google Scholar]
- Mars Drone Design by Rzeszow Takes First Place in International Space Competition. 2021. Available online: https://study.gov.pl/ (accessed on 6 October 2021).
- Escobar, D.; Chopra, I.; Datta, A. High-fidelity aeromechanical analysis of coaxial Mars helicopter. J. Aircr. 2021, 58, 609–623. [Google Scholar] [CrossRef]
- Zhou, C.; Xu, A.; Wang, F.; Chen, M.; Li, W.; Yin, R. Performance optimization of helicopter rotor in hover based on CFD simulation. Math. Probl. Eng. 2022, 2022, 3146658. [Google Scholar] [CrossRef]
- Pohly, J.A.; Kang, C.k.; Landrum, D.B.; Bluman, J.E.; Aono, H. Data-driven CFD scaling of bioinspired Mars flight vehicles for hover. Acta Astronaut. 2021, 180, 545–559. [Google Scholar] [CrossRef]
- Caros, L.; Buxton, O.; Vincent, P. Optimization of Triangular Airfoils for Martian Helicopters Using Direct Numerical Simulations. AIAA J. 2023, 61, 4935–4945. [Google Scholar] [CrossRef]
- Oyama, A.; Fujii, K. Airfoil design optimization for airplane for Mars exploration. In Proceedings of the J-55, the Third China-Japan-Korea Joint Symposium on Optimization of Structual and Mechanical Systems, CJK-OSM3, Kanazawa, Japan, 30 October–2 November 2004. [Google Scholar]
- Takaki, R. Aerodynamic characteristics of NACA4402 in low Reynolds number flows. Jpn. Soc. Aeronaut. Space Sci. 2006, 54, 367–373. [Google Scholar]
- Sunada, S.; Sakaguchi, A.; Kawachi, K. Airfoil Section Characteristics at a Low Reynolds Number; ASME: New York, NY, USA, 1997. [Google Scholar]
- Gavrilets, V.; Mettler, B.; Feron, E. Nonlinear model for a small-size acrobatic helicopter. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit 2001, Montreal, ON, Canada, 6–9 August 2001. [Google Scholar]
- Selig, M.S.; McGranahan, B.D. Wind tunnel aerodynamic tests of six airfoils for use on small wind turbines. J. Sol. Energy Eng. 2004, 126, 986–1001. [Google Scholar] [CrossRef]
- Lin, J.M.; Pauley, L.L. Low-Reynolds-number separation on an airfoil. AIAA J. 1996, 34, 1570–1577. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, B.; Zhang, H.; Xiang, C.; Fan, W.; Zhao, Z. Analysis of Aerodynamic Characteristics of Propeller Systems Based on Martian Atmospheric Environment. Drones 2023, 7, 397. [Google Scholar] [CrossRef]
- Zhao, P.; Gao, X.; Zhao, B.; Liu, H.; Wu, J.; Deng, Z. Machine Learning Assisted Prediction of Airfoil Lift-to-Drag Characteristics for Mars Helicopter. Aerospace 2023, 10, 614. [Google Scholar] [CrossRef]
- Anyoji, M.; Nonomura, T.; Aono, H.; Oyama, A.; Fujii, K.; Nagai, H.; Asai, K. Computational and experimental analysis of a high-performance airfoil under low-Reynolds-number flow condition. J. Aircr. 2014, 51, 1864–1872. [Google Scholar] [CrossRef]
- Spedding, G.; McArthur, J. Span efficiencies of wings at low Reynolds numbers. J. Aircr. 2010, 47, 120–128. [Google Scholar] [CrossRef]
- Jenett, B.; Calisch, S.; Cellucci, D.; Cramer, N.; Gershenfeld, N.; Swei, S.; Cheung, K.C. Digital morphing wing: Active wing shaping concept using composite lattice-based cellular structures. Soft Robot. 2017, 4, 33–48. [Google Scholar] [CrossRef]
- Desert, T.; Moschetta, J.M.; Bézard, H. Numerical and experimental investigation of an airfoil design for a Martian micro rotorcraft. Int. J. Micro Air Veh. 2018, 10, 262–272. [Google Scholar] [CrossRef]
- Kumar, V.; Paraschivoiu, M.; Paraschivoiu, I. Low Reynolds number vertical axis wind turbine for Mars. Wind Eng. 2010, 34, 461–476. [Google Scholar] [CrossRef]
- Nagata, T.; Noguchi, A.; Kusama, K.; Nonomura, T.; Komuro, A.; Ando, A.; Asai, K. Experimental investigation on compressible flow over a circular cylinder at Reynolds number of between 1000 and 5000. J. Fluid Mech. 2020, 893, A13. [Google Scholar] [CrossRef]
- Traub, L.W.; Coffman, C. Efficient low-Reynolds-number airfoils. J. Aircr. 2019, 56, 1987–2003. [Google Scholar] [CrossRef]
- Samuthira Pandi, J.S.; Mittal, S. Wake transitions and laminar separation bubble in the flow past an Eppler 61 airfoil. Phys. Fluids 2019, 31, 114102. [Google Scholar] [CrossRef]
- Huang, G.; Dai, Y.; Yang, C.; Wu, Y.; Xia, Y. Effect of dielectric barrier discharge plasma actuator on the dynamic moment behavior of pitching airfoil at low Reynolds number. Phys. Fluids 2021, 33, 043603. [Google Scholar] [CrossRef]
- Giguere, P.; Selig, M.S. Low Reynolds number airfoils for small horizontal axis wind turbines. Wind Eng. 1997, 42, 367–380. [Google Scholar]
- McGhee, R.J. Experimental Results for the Eppler 387 Airfoil at Low Reynolds Numbers in the Langley Low-Turbulence Pressure Tunnel; National Aeronautics and Space Administration: Washington, DC, USA, 1988; Volume 4062.
- Cole, G.M.; Mueller, T.J. Experimental Measurements of the Laminar Separation Bubble on an Eppler 387 Airfoil at Low Reynolds Numbers; Technical Report; National Aeronautics and Space Administration: Washington, DC, USA, 1990.
- Sa, J.H.; Park, S.H.; Kim, C.J.; Park, J.K. Low-Reynolds number flow computation for eppler 387 wing using hybrid DES/transition model. J. Mech. Sci. Technol. 2015, 29, 1837–1847. [Google Scholar] [CrossRef]
- SAHIN, M.; HALL, J.; MOHSENI, K.; HILLEWAERT, K. Direct numerical simulation of separated low-Reynolds number flows around an Eppler 387 airfoil. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NE, USA, 7–10 January 2008; p. 422. [Google Scholar]
- Ricci, R.; Montelpare, S. A quantitative IR thermographic method to study the laminar separation bubble phenomenon. Int. J. Therm. Sci. 2005, 44, 709–719. [Google Scholar] [CrossRef]
- Tatineni, M.; Zhong, X. Numerical simulation of unsteady low-Reynolds-number separated flows over airfoils. AIAA J. 2000, 38, 1295–1298. [Google Scholar] [CrossRef]
- Grip, H.F.; Johnson, W.; Malpica, C.; Scharf, D.P.; Mandić, M.; Young, L.; Allan, B.; Mettler, B.; Martin, M.S.; Lam, J. Modeling and identification of hover flight dynamics for NASA’s Mars helicopter. J. Guid. Control Dyn. 2020, 43, 179–194. [Google Scholar] [CrossRef]
- Lorenz, R.D.; Maurice, S.; Chide, B.; Mimoun, D.; Stott, A.; Murdoch, N.; Giller, M.; Jacob, X.; Wiens, R.C.; Montmessin, F.; et al. The sounds of a helicopter on Mars. Planet. Space Sci. 2023, 230, 105684. [Google Scholar] [CrossRef]
- Ruiz, M.C.; D’Ambrosio, D. Aerodynamic optimization and analysis of quadrotor blades operating in the Martian atmosphere. Aerosp. Sci. Technol. 2023, 132, 108047. [Google Scholar] [CrossRef]
- Liu, J.; Li, D.; Zuo, Z.; Liu, C.; Wang, H. Aerodynamic performance of a characteristic airfoil at low-Reynolds number and transonic flow under Mars sand-containing environment. Phys. Fluids 2023, 35, 076120. [Google Scholar] [CrossRef]
- Lemmon, M.T.; Lorenz, R.D.; Rabinovitch, J.; Newman, C.; Williams, N.R.; Sullivan, R.; Golombek, M.P.; Bell III, J.F.; Maki, J.N.; Vicente-Retortillo, A. Lifting and Transport of Martian Dust by the Ingenuity Helicopter Rotor Downwash as Observed by High-Speed Imaging From the Perseverance Rover. J. Geophys. Res. Planets 2022, 127, e2022JE007605. [Google Scholar] [CrossRef]
- Tomashevich, S.; Belyavskyi, A. Passification based simple adaptive control of quadrotor. IFAC-PapersOnLine 2016, 49, 281–286. [Google Scholar] [CrossRef]
- Zheng, E.; Xiong, J. Quad-rotor unmanned helicopter control via novel robust terminal sliding mode controller and under-actuated system sliding mode controller. Optik 2014, 125, 2817–2825. [Google Scholar] [CrossRef]
- Nicol, C.; Macnab, C.; Ramirez-Serrano, A. Robust adaptive control of a quadrotor helicopter. Mechatronics 2011, 21, 927–938. [Google Scholar] [CrossRef]
- Zhang, J.X.; Chai, T. Global Prescribed Performance Control of Unknown Strict-Feedback Systems with Quantized References. IEEE Trans. Syst. Man, Cybern. Syst. 2023, 53, 6257–6267. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, T.; Chai, T. Neural network control of underactuated surface vehicles with prescribed trajectory tracking performance. IEEE Trans. Neural Netw. Learn. Syst. 2022; early access. [Google Scholar] [CrossRef] [PubMed]
- Schafroth, D.; Bouabdallah, S.; Bermes, C.; Siegwart, R. From the test benches to the first prototype of the muFly micro helicopter. J. Intell. Robot. Syst. 2009, 54, 245–260. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Model Predictive Attitude–Altitude Control for a Miniature Coaxial Helicopter. IFAC Proc. Vol. 2010, 43, 139–144. [Google Scholar] [CrossRef]
- Schafroth, D.; Bermes, C.; Bouabdallah, S.; Siegwart, R. Modeling and system identification of the mufly micro helicopter. In Proceedings of the 2nd International Symposium on UAVs, Reno, NE, USA, 8–10 June 2009; Springer: Berlin/Heidelberg, Germany, 2010; pp. 27–47. [Google Scholar]
- Chen, C.; Chen, B.M.; Lee, T. Special issue on development of autonomous unmanned aerial vehicles. Mechatronics 2011, 21, 763–764. [Google Scholar] [CrossRef]
- Bouabdallah, S.; Bermes, C.; Grzonka, S.; Gimkiewicz, C.; Brenzikofer, A.; Hahn, R.; Schafroth, D.; Grisetti, G.; Burgard, W.; Siegwart, R. Towards palm-size autonomous helicopters. J. Intell. Robot. Syst. 2011, 61, 445–471. [Google Scholar] [CrossRef]
- Wang, X.; Dong, Z.; Tang, L.; Zhang, Q. Multiobjective multitask optimization-neighborhood as a bridge for knowledge transfer. IEEE Trans. Evol. Comput. 2022, 27, 155–169. [Google Scholar] [CrossRef]
- Wang, X.; Hu, T.; Tang, L. A multiobjective evolutionary nonlinear ensemble learning with evolutionary feature selection for silicon prediction in blast furnace. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 2080–2093. [Google Scholar] [CrossRef] [PubMed]
- Grip, H.F.; Conway, D.; Lam, J.; Williams, N.; Golombek, M.P.; Brockers, R.; Mischna, M.; Cacan, M.R. Flying a helicopter on Mars: How ingenuity’s flights were planned, executed, and analyzed. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–17. [Google Scholar]
- Maurette, M. Mars rover autonomous navigation. Auton. Robot. 2003, 14, 199–208. [Google Scholar] [CrossRef]
- Kostavelis, I.; Nalpantidis, L.; Boukas, E.; Rodrigalvarez, M.A.; Stamoulias, I.; Lentaris, G.; Diamantopoulos, D.; Siozios, K.; Soudris, D.; Gasteratos, A. Spartan: Developing a vision system for future autonomous space exploration robots. J. Field Robot. 2014, 31, 107–140. [Google Scholar] [CrossRef]
- Gerdes, L.; Azkarate, M.; Sánchez-Ibáñez, J.R.; Joudrier, L.; Perez-del Pulgar, C.J. Efficient autonomous navigation for planetary rovers with limited resources. J. Field Robot. 2020, 37, 1153–1170. [Google Scholar] [CrossRef]
- Wilcox, B.H.; Gennery, D.B.; Mishkin, A.H.; Cooper, B.K.; Lawton, T.B.; Lay, N.K.; Katzmann, S.P. A vision system for a mars rover. In Proceedings of the Mobile Robots II, Cambridge, CA, USA, 2–6 November 1987; Volume 852, pp. 172–179. [Google Scholar]
- Veismann, M.; Dougherty, C.; Rabinovitch, J.; Quon, A.; Gharib, M. Low-density multi-fan wind tunnel design and testing for the Ingenuity Mars Helicopter. Exp. Fluids 2021, 62, 193. [Google Scholar] [CrossRef]
- Sunada, S.; Yasuda, T.; Yasuda, K.; Kawachi, K. Comparison of wing characteristics at an ultralow Reynolds number. J. Aircr. 2002, 39, 331–338. [Google Scholar] [CrossRef]
- Lukow, S.; Hassanalian, M. Thrust Analysis of A Martian-Based Fixed-Wing Drone in Cruise and Loitering Flight Phases. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15 & 19–21 January 2021; p. 0929. [Google Scholar]
- Benedict, M.; Winslow, J.; Hasnain, Z.; Chopra, I. Experimental investigation of micro air vehicle scale helicopter rotor in hover. Int. J. Micro Air Veh. 2015, 7, 231–255. [Google Scholar] [CrossRef]
- Dull, C.; Wagner, L.; Young, L.; Johnson, W. Hover and forward flight performance modeling of the Ingenuity Mars Helicopter. In Proceedings of the Aeromechanics for Advanced Vertical Flight Technical Meeting, Transformative Vertical Flight 2022, San Jose, CA, USA, 25–27 January 2022. [Google Scholar]
- Koning, W.J.; Johnson, W.; Grip, H.F. Improved Mars helicopter aerodynamic rotor model for comprehensive analyses. AIAA J. 2019, 57, 3969–3979. [Google Scholar] [CrossRef]
- Kunz, P.J. Aerodynamics and Design for Ultra-Low Reynolds Number Flight; Stanford University: Stanford, CA, USA, 2003. [Google Scholar]
- Tsuzuki, N.; Sato, S.; Abe, T. Conceptual design and feasibility for a miniature Mars exploration rotorcraft. In Proceedings of the International Congress of the Aeronautical Sciences, Yokohama, Japan, 29 August–3 September 2004. [Google Scholar]
- McClean, J.; Merrison, J.; Iversen, J.; Azimian, M.; Wiegmann, A.; Pike, W.; Hecht, M.; Team, M.S. Filtration of simulated Martian atmosphere for in-situ oxygen production. Planet. Space Sci. 2020, 191, 104975. [Google Scholar] [CrossRef]
- McClean, J.; Merrison, J.; Iversen, J.; Madsen, M.; Araghi, K.; Meyen, F.; Pike, W.; Rapp, D.; Sanders, G.; Smith, P.; et al. Testing the Mars 2020 oxygen in-situ resource utilization experiment (MOXIE) HEPA filter and scroll pump in simulated Mars conditions. In Proceedings of the 48th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 20–24 March 2017. [Google Scholar]
- Phillips III, J.R.; Pollard, J.R.; Johansen, M.R.; Mackey, P.J.; Clements, J.S.; Calle, C.I. Martian atmospheric dust mitigation for ISRU intakes via electrostatic precipitation. In Earth and Space 2016: Engineering for Extreme Environments; American Society of Civil Engineers: Reston, VA, USA, 2016; pp. 530–538. [Google Scholar]
- Bohorquez, F.; Rankins, F.; Baeder, J.; Pines, D. Hover performance of rotor blades at low reynolds numbers for rotary wing micro air vehicles. An experimental and CFD study. In Proceedings of the 21st AIAA Applied Aerodynamics Conference, Orlando, FL, USA, 23–26 June 2003; p. 3930. [Google Scholar]
- Bohorquez, F. Rotor Hover Performance and System Design of an Efficient Coaxial Rotary Wing Micro Air Vehicle; University of Maryland: College Park, MA, USA, 2007. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environmental Parameter | Mars | Earth | Proportion |
|---|---|---|---|
| Gravitational acceleration (m/s) | 3.72 | 9.78 | 0.38 |
| Average surface air pressure (Pa) (m/s) | 640 | 101,300 | 0.0075 |
| Surface atmospheric density (kg/m) | 0.0167 | 1.22 | 0.014 |
| Average surface temperature (K) | 210 | 288 | 0.73 |
| Specific gas constant (J/g·K) | 0.189 | 0.287 | 0.67 |
| Sound velocity (m/s) | 227 | 320 | 0.72 |
| Dynamic viscosity (kg/m·s) | 1.289 × 10 | 1.789 × 10 | 0.72 |
| Atmospheric composition | 95% CO, 2.7% N, 1.6% Ar, 0.03% HO | 78% N, 21% O, 1% Ar | – |
| Detector Name | Atmospheric Model |
|---|---|
| The Pirate Ship | Model for atmospheric density distribution at low altitudes (150 km) |
| Pathfinder | Mars-GRAM 3.0 and Mars-GRAM 3.33 |
| Scott and Amundsen | Mars-GRAM 3.7 |
| Opportunity | Mars-GRAM |
| Courage | Mars-GRAM |
| Phoenix | MRAMS and Mars-GRAM |
| Curiosity | MRAMS and MMM5 |
| UAV Name | Institution | Wingspan | Total Mass | Propulsion System | Power Source | Endurance | Year |
|---|---|---|---|---|---|---|---|
| MICOR | Maryland | 15.24 cm | 103 g | Battery driven | LiMnO cells | 5 min | 2001 |
| MARV | Maryland | 4.266 m | 50 kg | BLDC motor | PEM fuel cells | 39 min | 2003 |
| Mesicopter 1 | Stanford | – | 3 g | – | – | – | 2000 |
| Mesicopter 2 | Stanford | – | 15 g | – | – | – | 2000 |
| Eye-On | Surrey | 1.4 m | 15 kg | Twin rotor | LiPo cells | 38 min | 2012 |
| Y4TR | Surrey | 1.0 m | 25 kg | – | – | 60 min | 2016 |
| muFly 1 | ETH Zurich | 15.0 cm | 95.84 g | BLDC motors | LiPo cells | – | 2010 |
| muFly 2 | ETH Zurich | 15.0 cm | 80.31 g | BLDC motors | LiPo cells | – | 2011 |
| Spherical UAV | ETH Zurich | 22.6 cm | 0.59 kg | Contra-rotating motor | 1300 mAh cell | – | 2016 |
| TAMS 1 | ARC | 0.982 m | 3.5 kg | – | – | 6 min | 2002 |
| TAMS 2 | ARC | 1.250 m | 4.6 kg | – | – | 6 min | 2002 |
| Ingenuity | JPL | 1.2 m | 1.8 kg | BLDC motor | Li-Ion cells | 2 min | 2021 |
| Institution | Dimensionality | Blade Diameter | Aerodynamic Parameters | Year |
|---|---|---|---|---|
| Imperial College London | 2D (triangular airfoils) | – | 2023 | |
| JAXA | 2D (NACA4402) | – | 2006 | |
| Maryland | 3D | 0.4674 m | 2021 | |
| UAH | 3D (rectangular wing shape) | 0.48 m | 2021 | |
| CETC | 3D (NACA0012) | 2.286 m | , | 2022 |
| BIT | 3D (clf5605) | 1.21m | 2023 | |
| HIT | 2D & 3D (NACA airfoils) | 0.90 m | , | 2023 |
| Institution | Airfoil | Reynolds Number | Separation Edge | Year |
|---|---|---|---|---|
| Queen Mary College | – | – | Leading | 1969 |
| Penn State University | Eppler 387 | 100,000 | leading & trailing | 1996 |
| University of California | Eppler 387, APEX airfoils | 100,000–200,000 | Leading | 1997 |
| University of Colorado | Eppler 387 | Eppler 387 | Leading | 2008 |
| JAXA | Ishii airfoils, NACA0002, NACA0012 | 24,000 | Leading and trailing | 2014 |
| Seoul National University | Eppler 387 | 100,000 | Leading and trailing | 2015 |
| IIT Kanpur | Eppler 61 | 100–87,000 | Leading and trailing | 2019 |
| Institution | Control Method | Year |
|---|---|---|
| ETH Zurich | Attitude and altitude control | 2008 |
| University of Patras | Predictive attitude–altitude control | 2008 |
| University of Calgary | Direct approximate-adaptive control | 2011 |
| China Jiliang University | Robust terminal sliding mode control | 2014 |
| ITMO University | Passification based simple adaptive | 2016 |
| California Institute of Technology | Collective and cyclic control | 2018 |
| European Space Agency | Trajectory control | 2020 |
| Space Science Institute | Telemetry and navigation camera images to control | 2022 |
| Johns Hopkins Applied Physics Laboratory | Collective and cyclic control | 2023 |
| Harbin Institute of Technology | Group injection control | 2023 |
| Tsinghua University | Global prescribed performance control | 2023 |
| Tsinghua University | Neural network control | 2023 |
| Institution | Vacuum Device | Rotor Structure | Blade Number | Reynolds Number | Mach Number | Year |
|---|---|---|---|---|---|---|
| Tokyo | Large vacuum vessel | Single rotor | 2 | 2000–8000 | <0.13 | 2004 |
| Stanford | – | Single rotor | 4 | 1000–10,000 | <0.30 | 2003 |
| Illinois | – | Single rotor | 2 | – | 0.13–0.26 | 2011 |
| Maryland | Large vacuum vessel | Single rotor | 2 | 15,000–30,000 | 0.10–0.60 | 2007 |
| Maryland | Large vacuum vessel | Coaxial rotor | 3 | <5000 | 0.30–0.42 | 2016 |
| ARC | NASA vacuum chamber | Single rotor | 3, 4 | 37,000–54,000 | 0.50–0.65 | 2002 |
| JPL | NASA vacuum chamber | Coaxial rotor | 2 | <10,000 | <0.60 | 2018 |
| Key Technology | Technical Challenges |
|---|---|
| Mars near-surface atmospheric environment | ✓ Complex Martian atmospheric conditions ✓ Lack of genuine Martian atmospheric data ✓ Accurate atmospheric models ✓ International collaboration |
| Proof-of-concept prototype | ✓ Feasibility validation ✓ Maximum flight thrust ✓ Flight range ✓ Endurance |
| Aerodynamic characteristics of rotor system | ✓ Airfoil lift–drag characteristics analysis ✓ Rotor system thrust and power ✓ Rotor system structure ✓ Boundary layer separation phenomenon |
| Flight control method | ✓ Uncertainty in atmospheric conditions ✓ Communication latency ✓ Autonomy and intelligent control ✓ Navigation and obstacle avoidance |
| Ground simulation experiment | ✓ Mars atmospheric environment simulation ✓ Rotor system testing setup ✓ Experimental plan ✓ Feasibility analysis |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, P.; Li, R.; Wu, P.; Liu, H.; Gao, X.; Deng, Z. Review of Key Technologies of Rotary-Wing Mars UAVs for Mars Exploration. Inventions 2023, 8, 151. https://doi.org/10.3390/inventions8060151
Zhao P, Li R, Wu P, Liu H, Gao X, Deng Z. Review of Key Technologies of Rotary-Wing Mars UAVs for Mars Exploration. Inventions. 2023; 8(6):151. https://doi.org/10.3390/inventions8060151
Chicago/Turabian StyleZhao, Pengyue, Ruihan Li, Peng Wu, Huan Liu, Xifeng Gao, and Zongquan Deng. 2023. "Review of Key Technologies of Rotary-Wing Mars UAVs for Mars Exploration" Inventions 8, no. 6: 151. https://doi.org/10.3390/inventions8060151
APA StyleZhao, P., Li, R., Wu, P., Liu, H., Gao, X., & Deng, Z. (2023). Review of Key Technologies of Rotary-Wing Mars UAVs for Mars Exploration. Inventions, 8(6), 151. https://doi.org/10.3390/inventions8060151