Extraction of Structural System Designs from Topologies via Morphological Analysis and Artificial Intelligence


Abstract
:1. Introduction
1.1. Literature Review
1.2. Contribution of This Research
2. Methodology
2.1. Topology Optimization
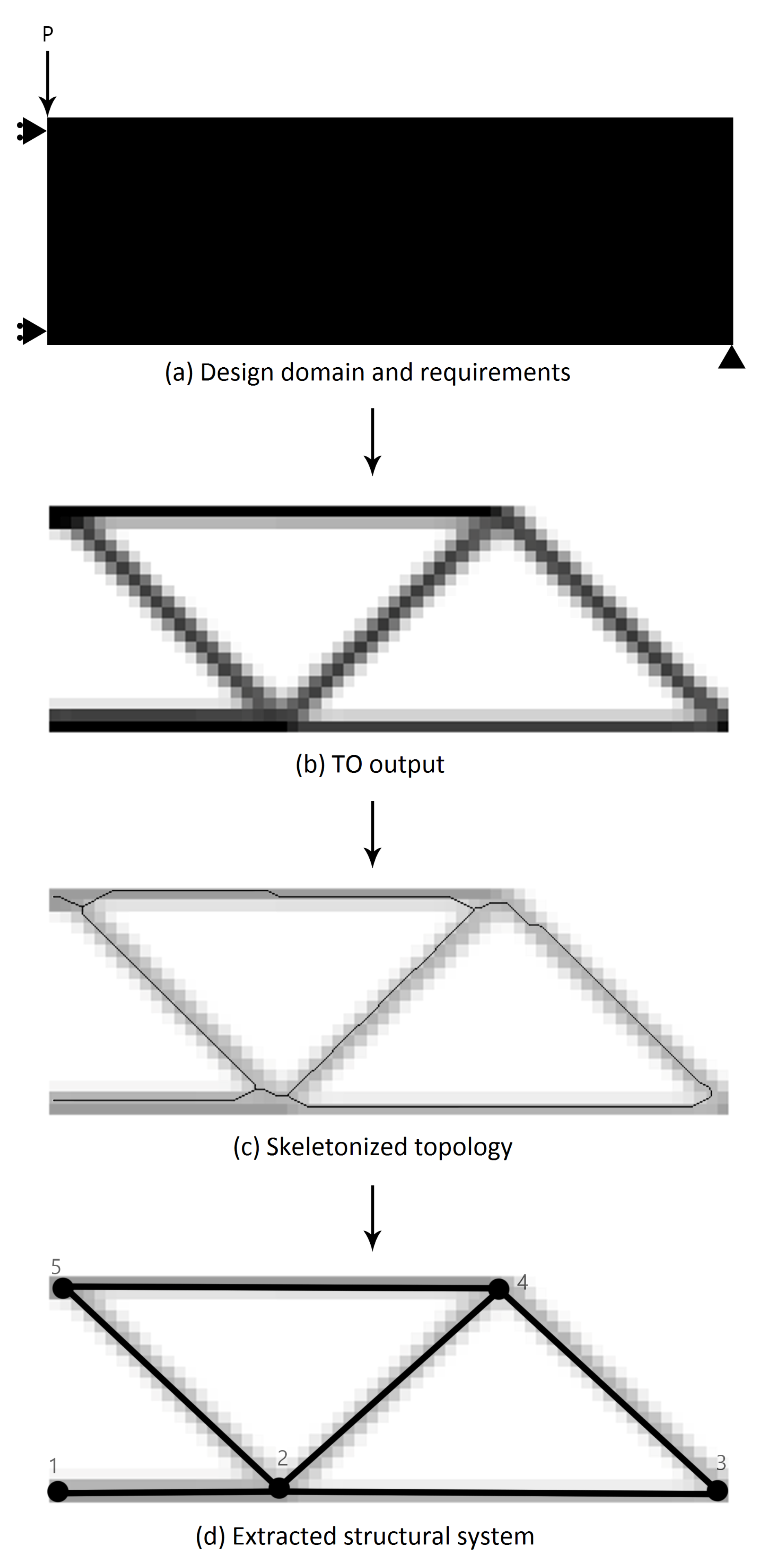
2.2. Node-Element Extraction from Topologies
2.2.1. Topology Skeletonization
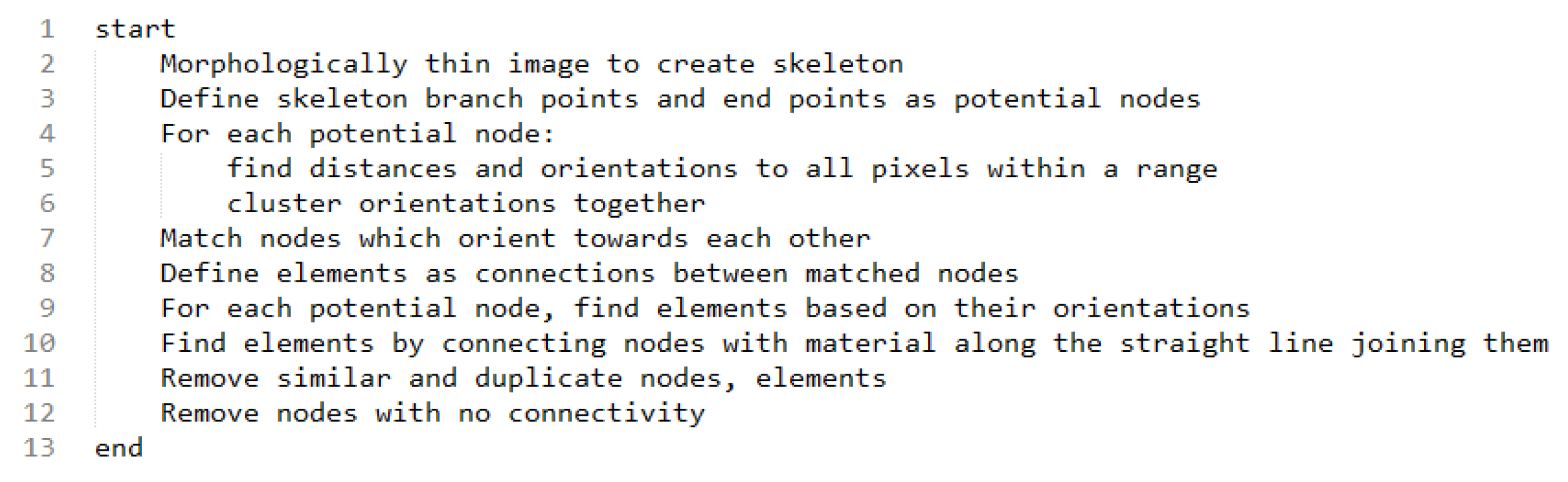
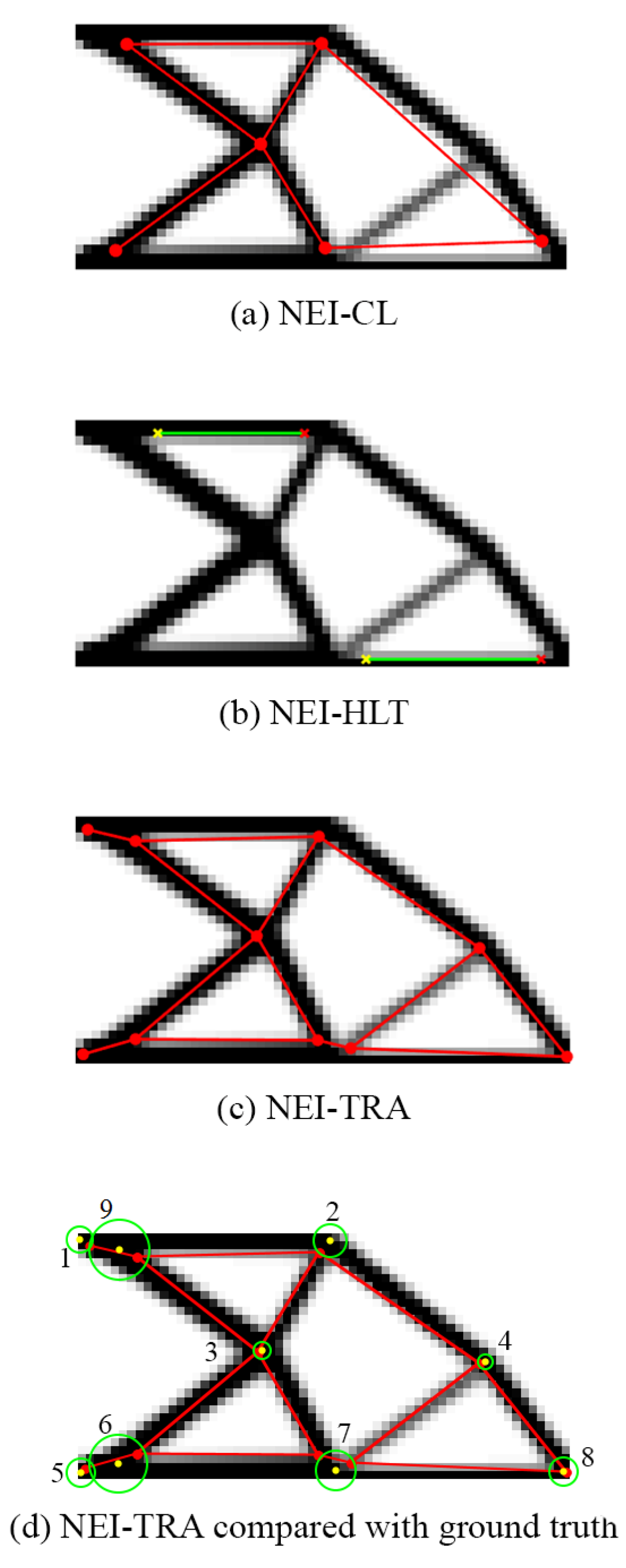
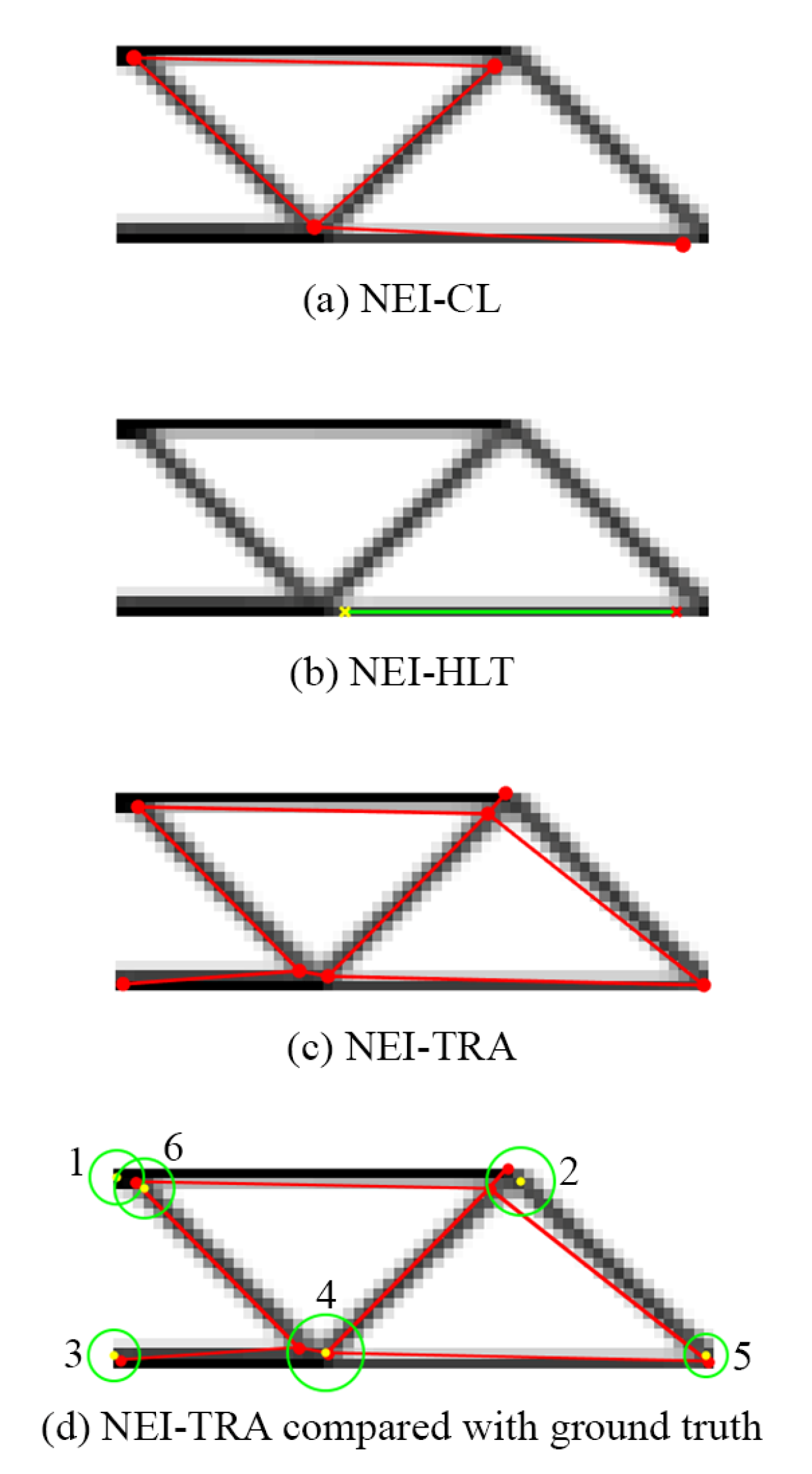
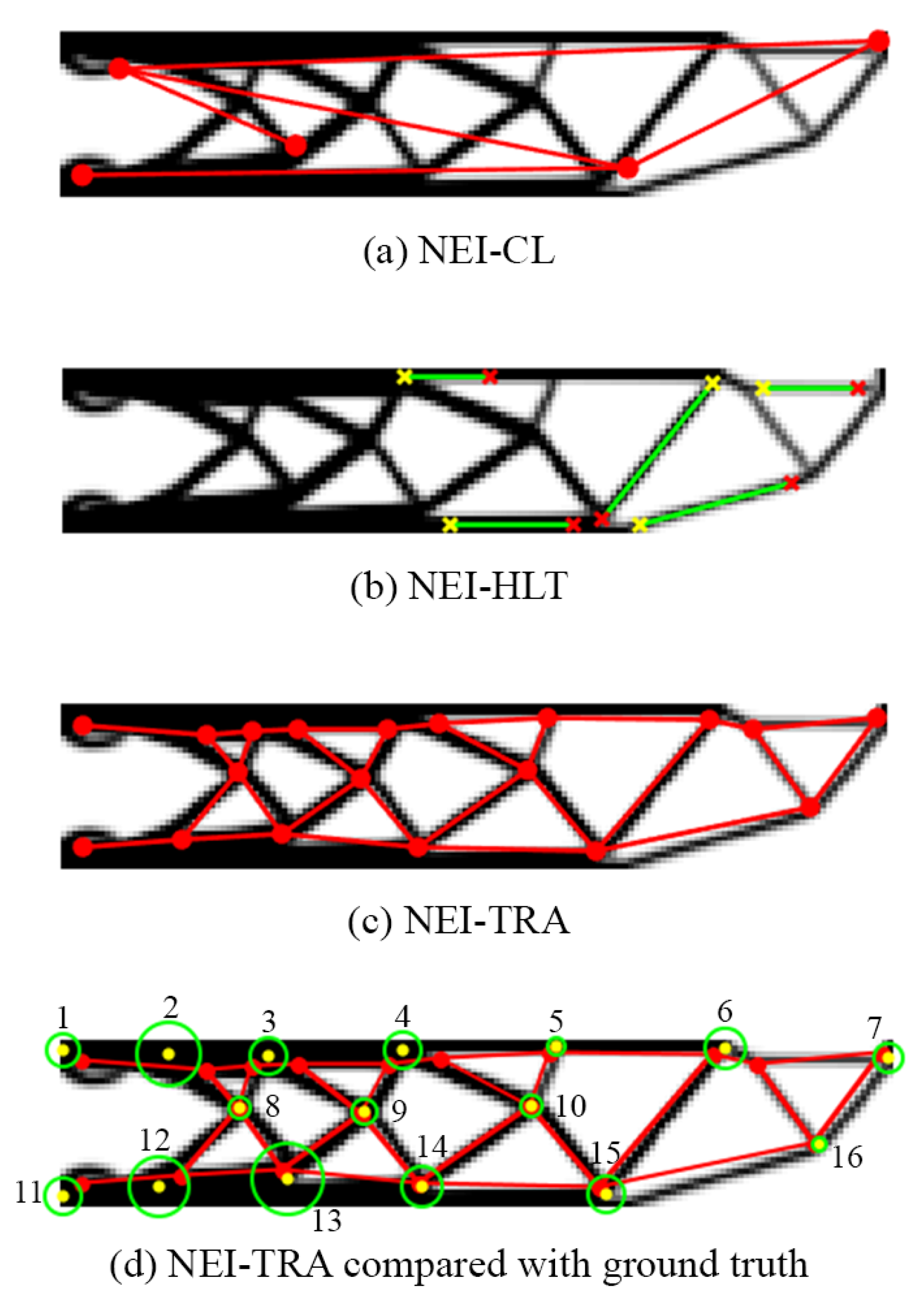
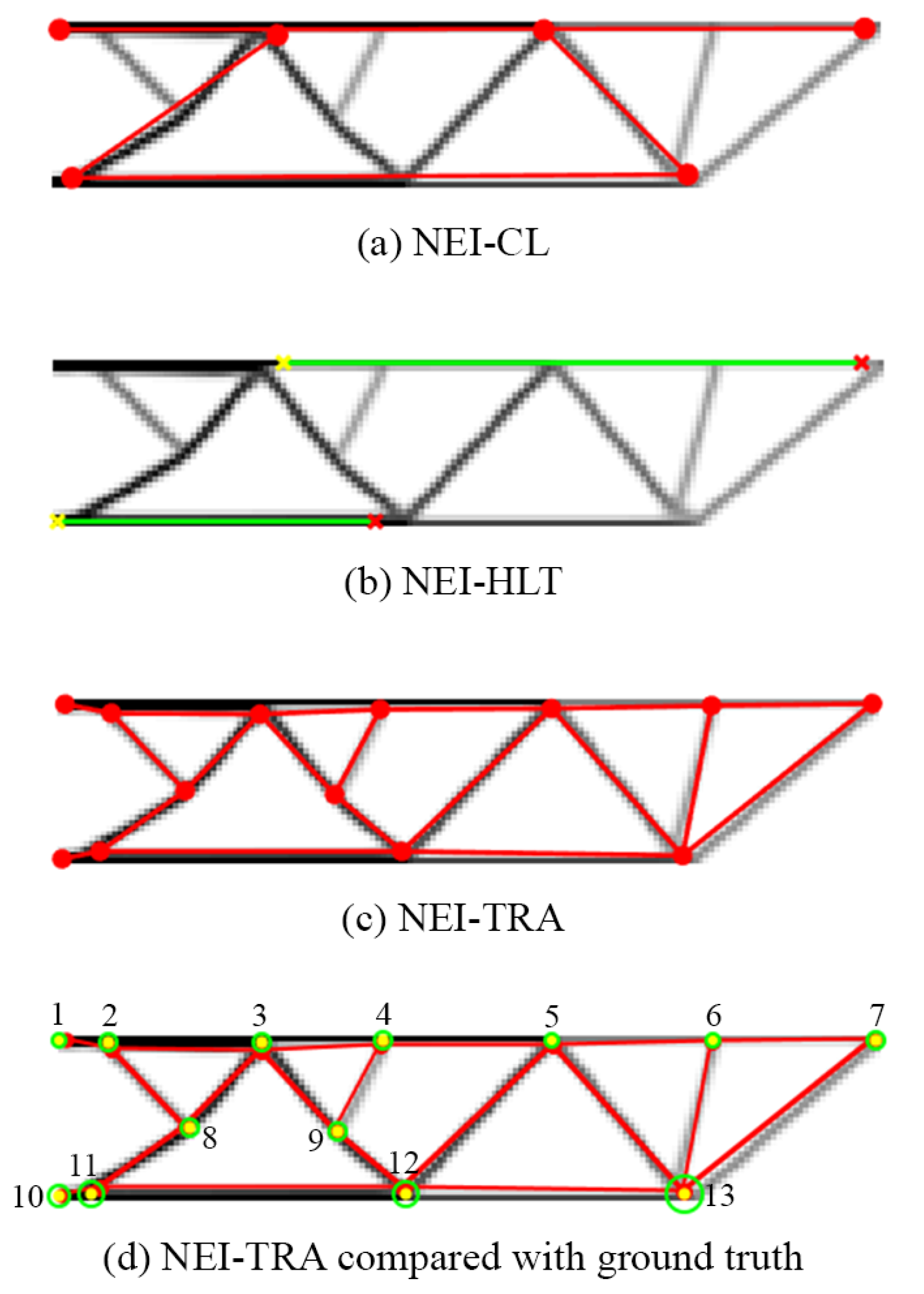
2.2.2. NEI-CL: Directional Clustering Algorithm Variant
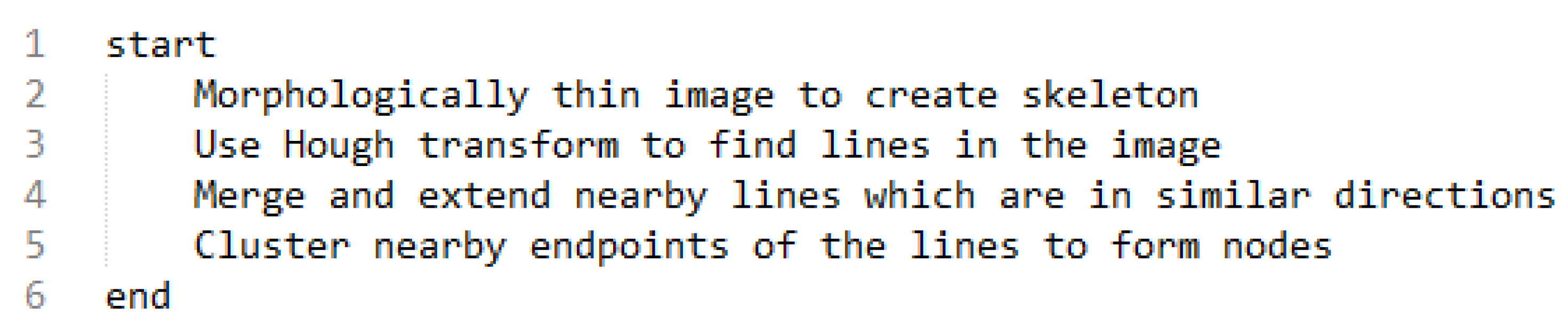
2.2.3. NEI-HLT: Hough Line Transform Based Algorithm Variant
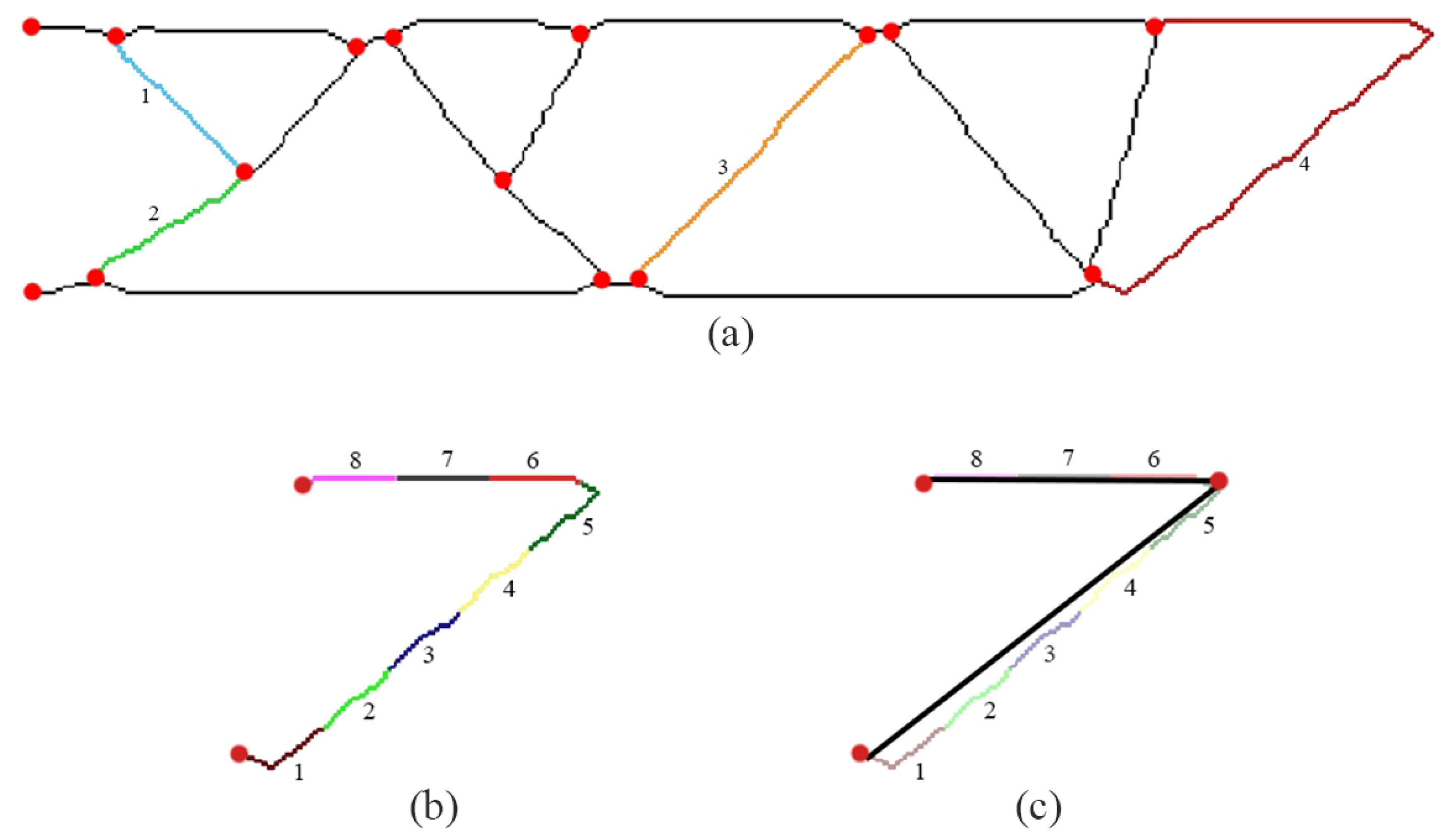
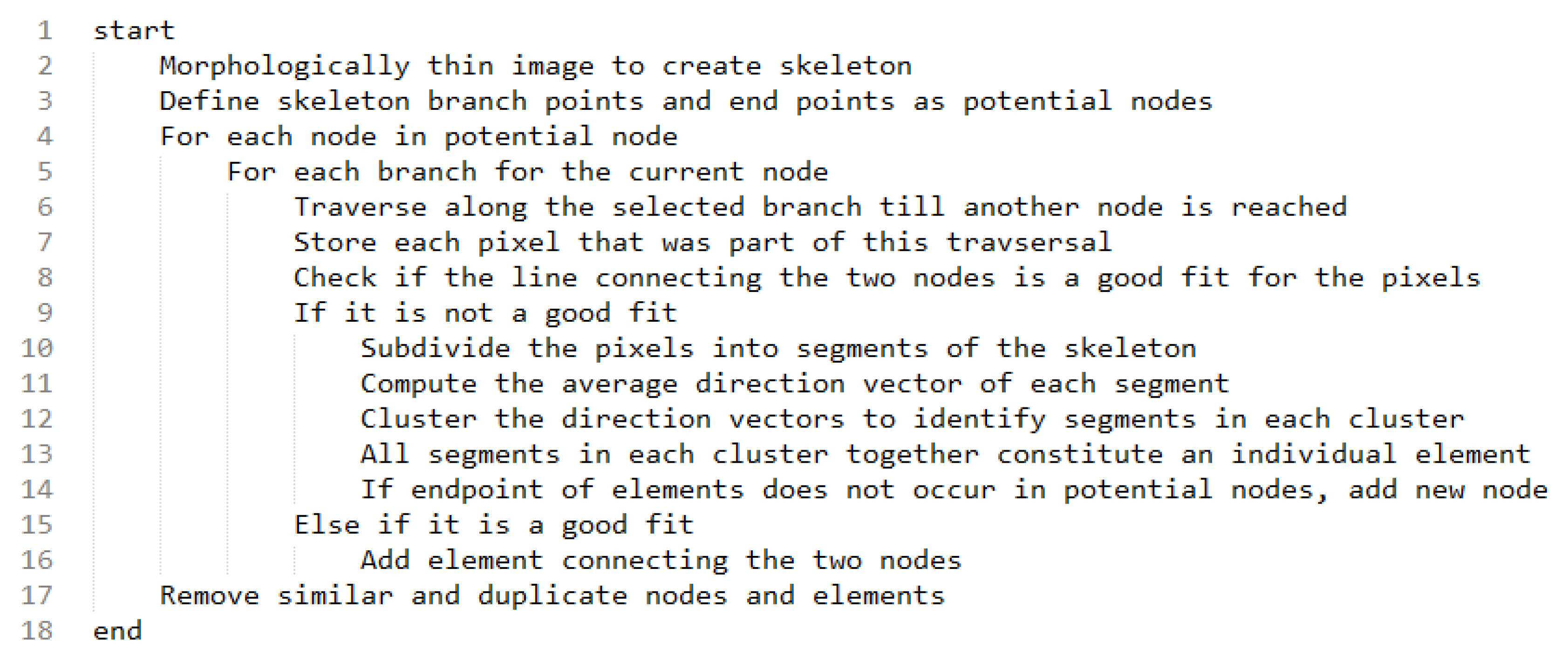
2.2.4. NEI-TRA: Node to Node Traversal Algorithm Variant
3. Experiments and Results
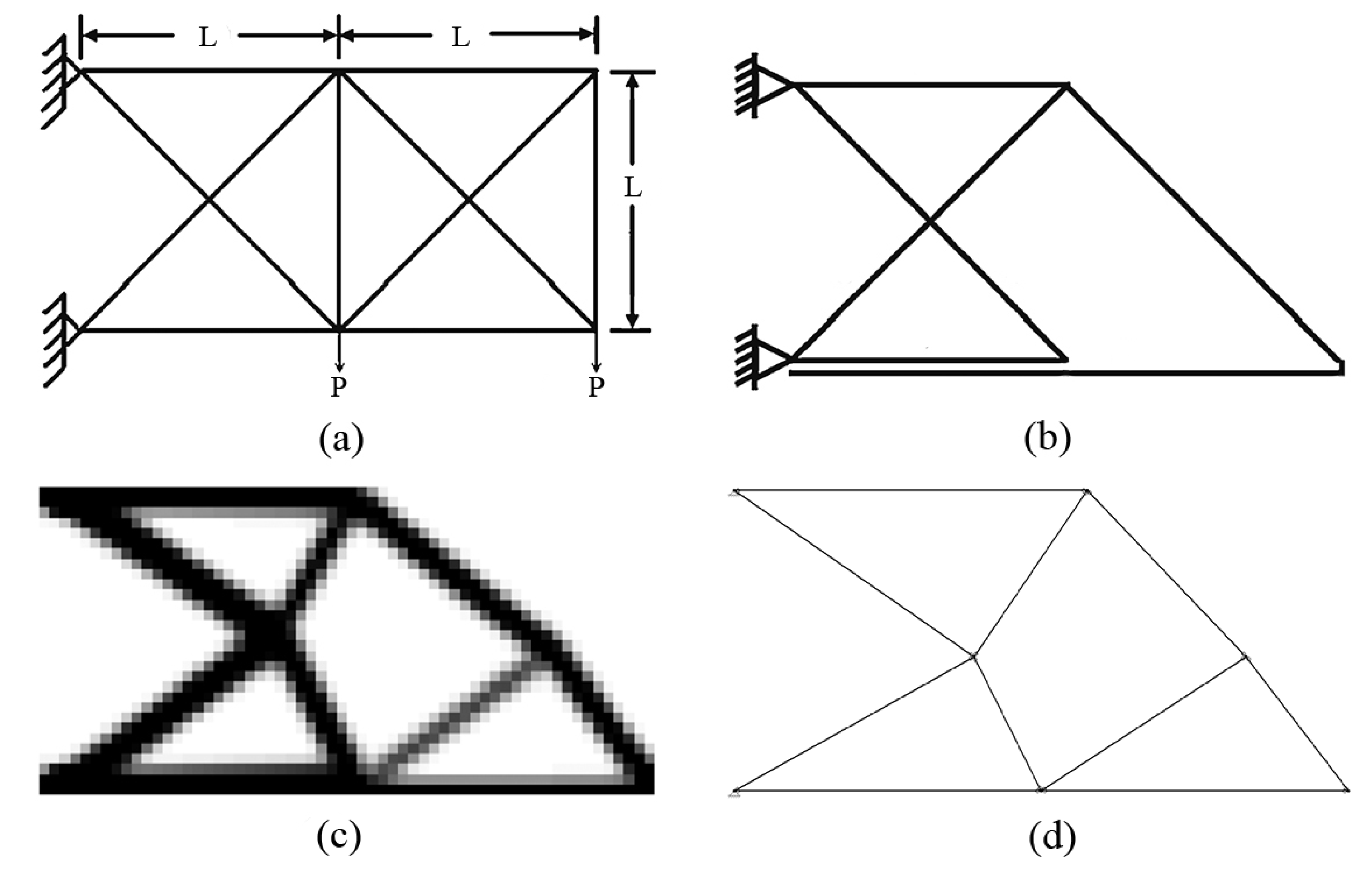
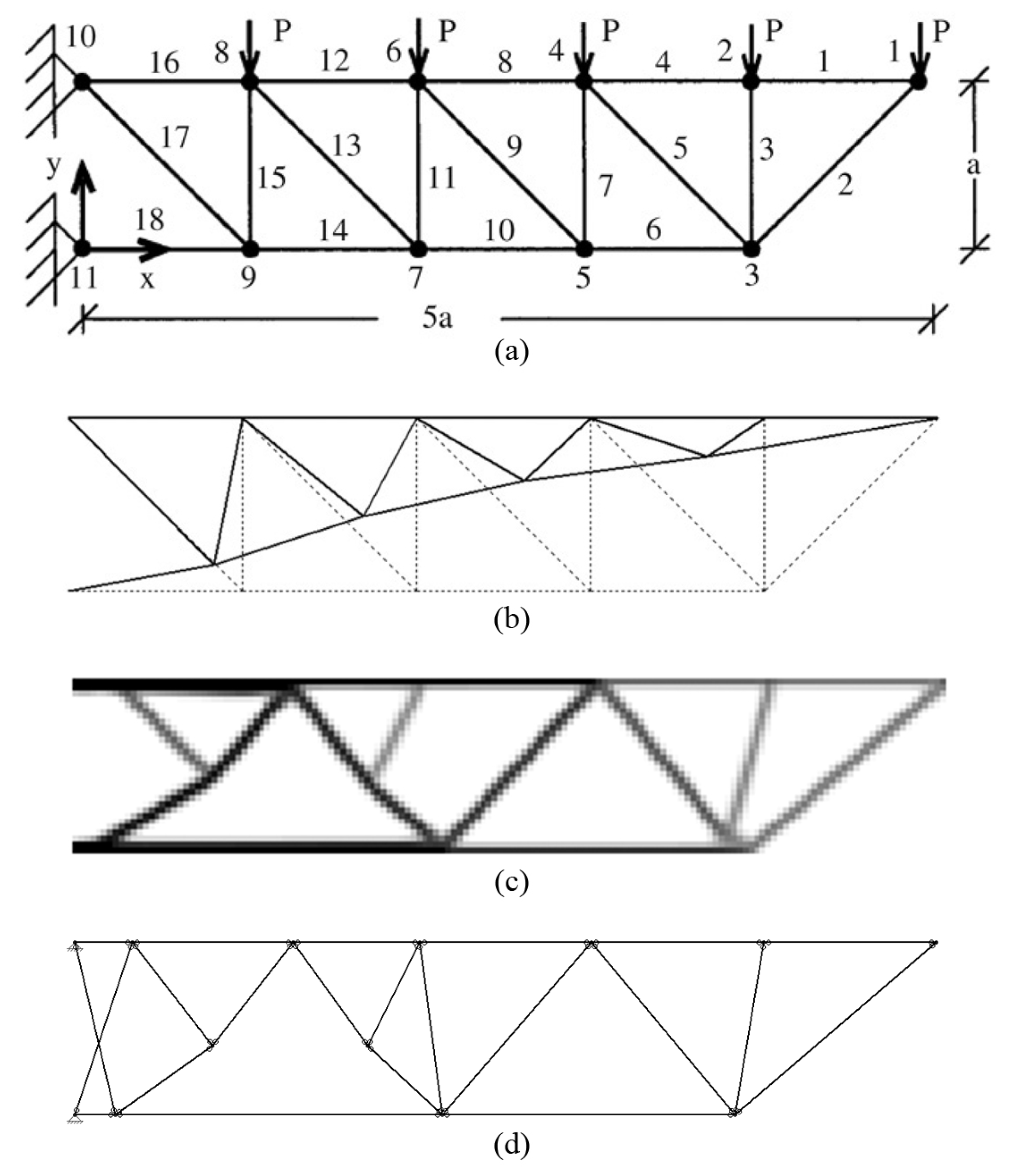
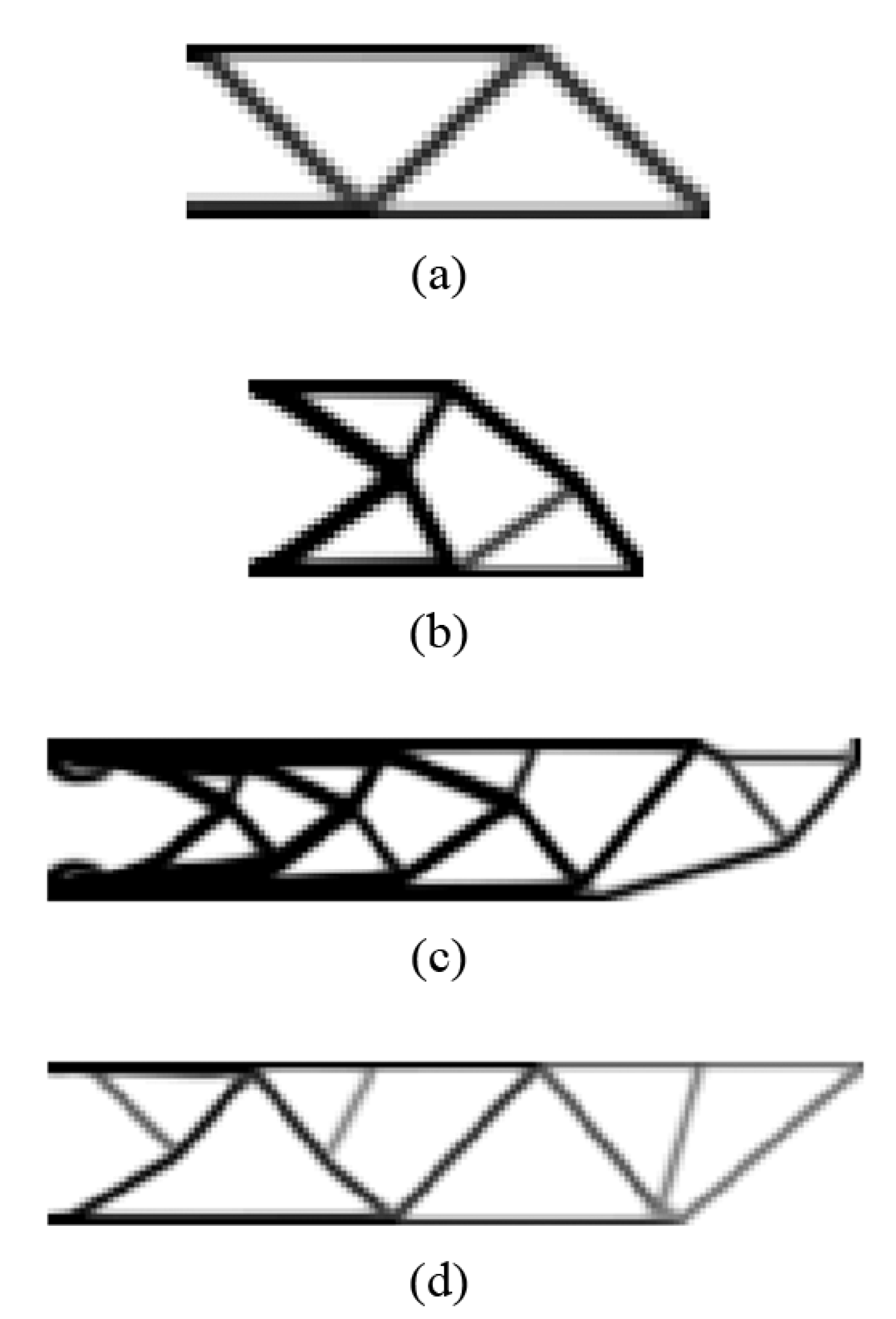
3.1. Preliminary Analysis: Extracting Structural Systems from Topologies
3.1.1. Metrics
3.1.2. Results
3.2. Extraction Algorithm Analysis
3.2.1. Metrics
3.2.2. Results
3.2.3. Summary
3.3. Sensitivity Analysis
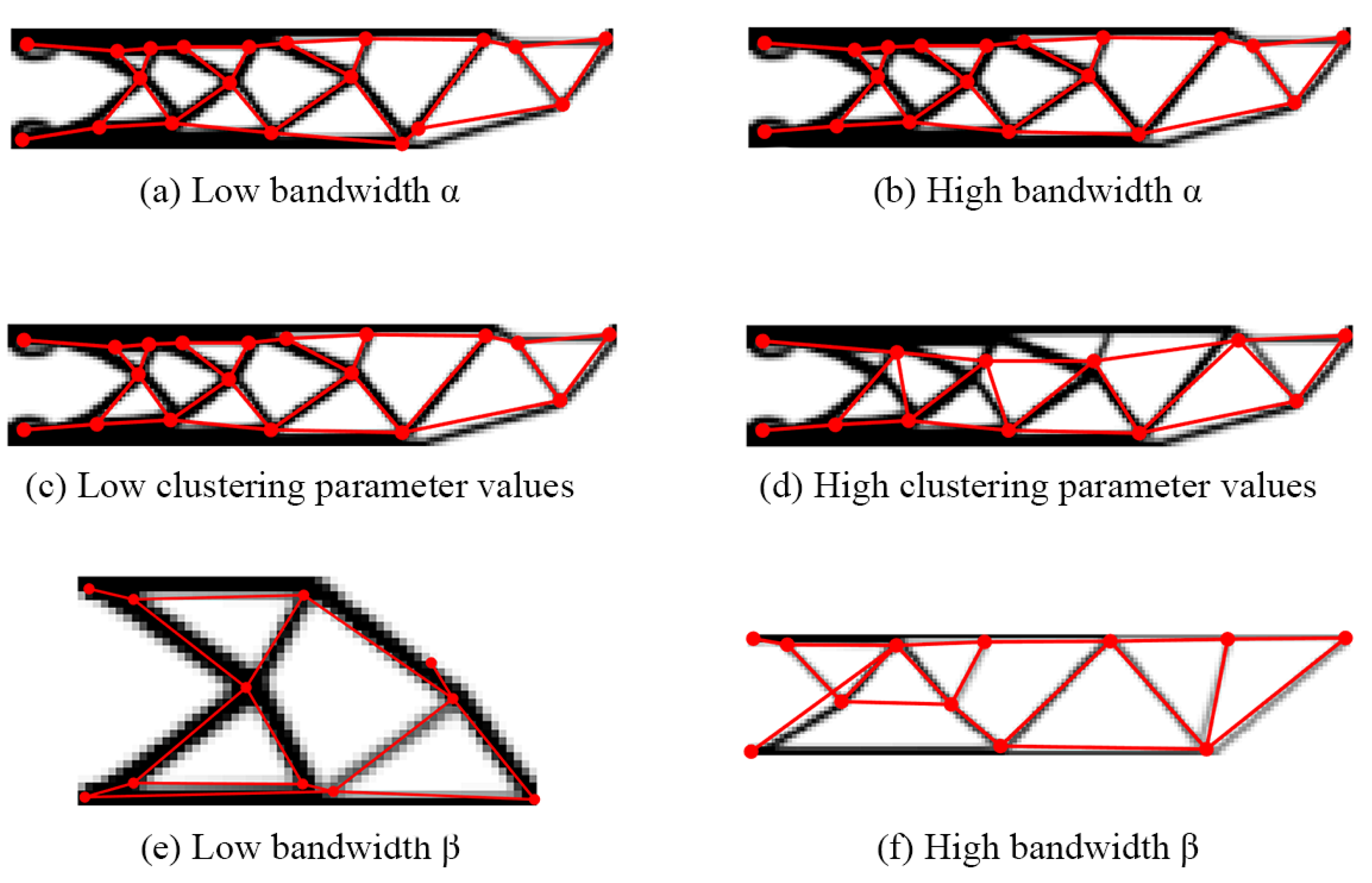
3.3.1. Impact of Bandwidth Parameter α
3.3.2. Impact of the Three Clustering Parameters
3.3.3. Impact of Bandwidth Parameter β
4. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| TO | Topology Optimization |
| EA | Evolutionary Algorithms |
| SIMP | Solid Isotropic Material with Penalization |
| NEI-CL | Node Element identification via Clustering |
| NEI-HLT | Node Element identification via Hough Line Transform |
| NEI-TRA | Node Element identification via Node to Node Traversal |
References
- Rajan, S.D. Sizing, Shape, and Topology Design Optimization of Trusses Using Genetic Algorithm. J. Struct. Eng. 1995, 121, 1480–1487. [Google Scholar] [CrossRef]
- Ho-Huu, V.; Vo-Duy, T.; Luu-Van, T.; Le-Anh, L.; Nguyen-Thoi, T. Optimal design of truss structures with frequency constraints using improved differential evolution algorithm based on an adaptive mutation scheme. Autom. Constr. 2016, 68, 81–94. [Google Scholar] [CrossRef]
- Kicinger, R.; Arciszewski, T.; DeJong, K. Evolutionary Design of Steel Structures in Tall Buildings. J. Comput. Civ. Eng. 2005, 19, 223–238. [Google Scholar] [CrossRef]
- Xu, T.; Zuo, W.; Xu, T.; Song, G.; Li, R. An adaptive reanalysis method for genetic algorithm with application to fast truss optimization. Acta Mech. Sin. 2009, 26, 225–234. [Google Scholar] [CrossRef]
- Tejani, G.G.; Savsani, V.J.; Bureerat, S.; Patel, V.K. Topology and Size Optimization of Trusses with Static and Dynamic Bounds by Modified Symbiotic Organisms Search. J. Comput. Civ. Eng. 2017, 32, 04017085. [Google Scholar] [CrossRef]
- Rajeev, S.; Krishnamoorthy, C. Discrete Optimization of Structures Using Genetic Algorithms. J. Struct. Eng. 1992, 118, 1233–1250. [Google Scholar] [CrossRef]
- Hajela, P.; Lee, E. Genetic algorithms in truss topological optimization. Int. J. Solids Struct. 1995, 32, 3341–3357. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Yang, X.S.; Alavi, A.H. Mixed variable structural optimization using Firefly Algorithm. Comput. Struct. 2011, 89, 2325–2336. [Google Scholar] [CrossRef]
- Hasancebi, O.; Azad, S.K. Adaptive dimensional search: A new metaheuristic algorithm for discrete truss sizing optimization. Comput. Struct. 2015, 154, 1–16. [Google Scholar] [CrossRef]
- Wu, C.Y.; Tseng, K.Y. Truss structure optimization using adaptive multi-population differential evolution. Struct. Multidiscip. Optim. 2010, 42, 575–590. [Google Scholar] [CrossRef]
- Goncalves, M.S.; Lopez, R.H.; Miguel, L.F. Search group algorithm: A new metaheuristic method for the optimization of truss structures. Comput. Struct. 2015, 153, 165–184. [Google Scholar] [CrossRef]
- Bendsoe, M.P. Optimal shape design as a material distribution problem. Struct. Multidiscip. Optim. 1989, 1, 193–202. [Google Scholar] [CrossRef]
- Zhou, M.; Rozvany, G.I.N. The COC algorithm, Part II: Topological, geometrical and generalized shape optimization. Comput. Methods Appl. Mech. Eng. 1991, 89, 309–336. [Google Scholar] [CrossRef]
- Stolpe, M.; Svanberg, K. An alternative interpolation scheme for minimum compliance topology optimization. Struct. Multidiscip. Optim. 2001, 22, 116–124. [Google Scholar] [CrossRef]
- Bruns, T.E. A reevaluation of the SIMP method with filtering and an alternative formulation for solid–void topology optimization. Struct. Multidiscip. Optim. 2005, 30, 428–436. [Google Scholar] [CrossRef]
- Bendsoe, M.P.; Sigmund, O. Topology Optimization: Theory, Methods, and Applications; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Deaton, J.D.; Grandhi, R.V. A survey of structural and multidisciplinary continuum topology optimization: Post 2000. Struct. Multidiscip. Optim. 2013, 49, 1–38. [Google Scholar] [CrossRef]
- Sigmund, O.; Maute, K. Topology optimization approaches. Struct. Multidiscip. Optim. 2013, 48, 1031–1055. [Google Scholar] [CrossRef]
- Pereira, J.T.; Fancello, E.A.; Barcellos, C.S. Topology optimization of continuum structures with material failure constraints. Struct. Multidiscip. Optim. 2004, 26, 50–66. [Google Scholar] [CrossRef]
- Bruggi, M.; Duysinx, P. Topology optimization for minimum weight with compliance and stress constraints. Struct. Multidiscip. Optim. 2012, 46, 369–384. [Google Scholar] [CrossRef]
- Kreissl, S.; Pingen, G.; Maute, K. Topology optimization for unsteady flow. Int. J. Numer. Methods Eng. 2011, 87, 1229–1253. [Google Scholar] [CrossRef]
- Zhou, S.; Li, Q. Computational design of multi-phase microstructural materials for extremal conductivity. Comput. Mater. Sci. 2008, 43, 549–564. [Google Scholar] [CrossRef]
- Wang, Q.; Lu, Z.; Zhou, C. New Topology Optimization Method for Wing Leading-Edge Ribs. J. Aircr. 2011, 48, 1741–1748. [Google Scholar]
- Zhu, J.H.; Zhang, W.H.; Xia, L. Topology Optimization in Aircraft and Aerospace Structures Design. Arch. Comput. Methods Eng. 2016, 23, 595–622. [Google Scholar] [CrossRef]
- Xie, Y.M.; Steven, G.P. A simple evolutionary procedure for structural optimization. Comput. Struct. 1993, 49, 885–896. [Google Scholar] [CrossRef]
- Rozvany, G.I.N. A critical review of established methods of structural topology optimization. Struct. Multidiscip. Optim. 2008, 37, 217–237. [Google Scholar] [CrossRef]
- Bendsoe, M.P.; Kikuchi, N. Generating optimal topologies in structural design using a homogenization method. Comput. Methods Appl. Mech. Eng. 1988, 71, 197–224. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough Transformation to Detect Lines and Curves in Pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing; Pearson: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Witten, I.; Frank, E.; Hall, M. Data Mining: Practical Machine Learning Tools and Techniques, 3rd ed.; Morgan Kaufmann: Burlington, MA, USA, 2011. [Google Scholar]
- Perez, R.E.; Behdinan, K. Particle swarm approach for structural design optimization. Comput. Struct. 2007, 85, 1579–1588. [Google Scholar] [CrossRef]
- Kaveh, A.; Kalatjari, V. Size/geometry optimization of trusses by the force method and genetic algorithm. Z. Angew. Math. Mech. 2004, 84, 347–357. [Google Scholar] [CrossRef]
- Rahami, H.; Kaveh, A.; Gholipour, Y. Sizing, geometry and topology optimization of trusses via force method and genetic algorithm. Eng. Struct. 2008, 30, 2360–2369. [Google Scholar] [CrossRef]
- Sigmund, O. A 99 line topology optimization code written in Matlab. Struct. Multidiscip. Optim. 2001, 21, 120–127. [Google Scholar] [CrossRef]
- RISA. RISA2D; RISA-2D Educational; RISA: Foothill Ranch, CA, USA, 2017. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metrics | Perez and Behdinan (2007) | Xu et al. (2009) | Wu and Tseng (2010) * | Wu and Tseng (2010) ** | TO System |
|---|---|---|---|---|---|
| Weight (kgs) | 2278.94 | 2303.45 | 2295.38 | 2145.80 | 2323.07 |
| Deflection (cm) | 5.11 | 5.08 | 5.05 | 5.08 | 5.21 |
| Maximum Stress (MPa) | 172.51 | 140.65 | 172.37 | 128.93 | 57.98 |
| Average Stress (MPa) | 56.54 | 49.64 | 56.54 | 74.26 | 49.78 |
| Metrics | Kaveh and Kalatjari (2004) | Rahami et al. (2008) | TO System (Frame) | TO System (Truss) * |
|---|---|---|---|---|
| Weight (kgs) | 2062.89 | 2055.09 | 2098.73 | 2192.09 |
| Deflection (cm) | 46.33 | 51.18 | 28.37 | 22.94 |
| Maximum Stress (MPa) | 137.41 | 137.90 | 123.14 | 135.21 |
| Average Stress (MPa) | 75.01 | 79.57 | 59.43 | 62.88 |
| Structure | Number of Nodes Identified | Number of Elements Identified | ||||||
|---|---|---|---|---|---|---|---|---|
| GT | NEI-CL | NEI-HLT | NEI-TRA | GT | NEI-CL | NEI-HLT | NEI-TRA | |
| TO1 | 7 | 6 | 4 | 10 | 10 | 7 | 2 | 13 |
| TO2 | 6 | 4 | 2 | 7 | 7 | 4 | 1 | 8 |
| TO3 | 16 | 5 | 7 | 19 | 26 | 5 | 5 | 29 |
| TO4 | 13 | 6 | 4 | 13 | 19 | 6 | 2 | 19 |
| Node # | Ground Truth Coordinates | Distance from Ground Truth | Variance in Ground Truth |
|---|---|---|---|
| 1 | (74.8, 165) | 12.1 | 2.68 |
| 2 | (130, 167) | 22.2 | 5.46 |
| 3 | (182, 168) | 7.28 | 3.13 |
| 4 | (252, 165) | 8.97 | 2.88 |
| 7 | (505, 169) | 3.61 | 2.41 |
| 10 | (319, 194) | 0.83 | 1.81 |
| 11 | (74.8, 241) | 11.7 | 3.07 |
| 12 | (125, 236) | 13.1 | 5.01 |
| 13 | (192, 232) | 4.6 | 5.96 |
| Structure | Mean Coordinate Distance from Ground Truth | Standard Deviation in Ground Truth |
|---|---|---|
| TO1 | 9.64 | 4.82 |
| TO2 | 9.93 | 6.85 |
| TO3 | 6.78 | 3.00 |
| TO4 | 2.59 | 1.51 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jootoo, A.; Lattanzi, D. Extraction of Structural System Designs from Topologies via Morphological Analysis and Artificial Intelligence. Designs 2018, 2, 8. https://doi.org/10.3390/designs2010008
Jootoo A, Lattanzi D. Extraction of Structural System Designs from Topologies via Morphological Analysis and Artificial Intelligence. Designs. 2018; 2(1):8. https://doi.org/10.3390/designs2010008
Chicago/Turabian StyleJootoo, Achyuthan, and David Lattanzi. 2018. "Extraction of Structural System Designs from Topologies via Morphological Analysis and Artificial Intelligence" Designs 2, no. 1: 8. https://doi.org/10.3390/designs2010008
APA StyleJootoo, A., & Lattanzi, D. (2018). Extraction of Structural System Designs from Topologies via Morphological Analysis and Artificial Intelligence. Designs, 2(1), 8. https://doi.org/10.3390/designs2010008