1. Introduction
Optimization is the process of determining the decision variables of a function to minimize or maximize its values. Most of the real world problems [
1,
2,
3] include nonlinear constraints, non-convex, complicated, and a large number of solution spaces. Therefore, solving such problems with a large number of variables and constraints is very tedious and complex. There are many local optimum solutions that do not guarantee the best overall solution using classical numerical methods.
To overcome such problems, metaheuristic optimization algorithms have been introduced which are capable of solving such complex problems during the course of iterations. Recently, immense interest has been focused on the development of metaheuristic algorithms owing to their flexibility and simplicity by nature.
Metaheuristics are broadly classified into two categories [
4] such as single solution and population based algorithms. Single solution based algorithms are those in which a solution is randomly generated and improved until the optimum result is obtained, whereas population based algorithms are those in which a set of solutions are randomly generated in a given search space and solution values are updated during iterations until the best solution is generated.
However, single solution based algorithms may trap into local optima which may prevent us to find global optimum as it reforms only one solution, which is randomly generated for a given problem. On the other hand, population based algorithms have an inherent ability to escape local optima [
5]. Due to this, nowadays, population based algorithms have gained the attention of multitudinous researchers.
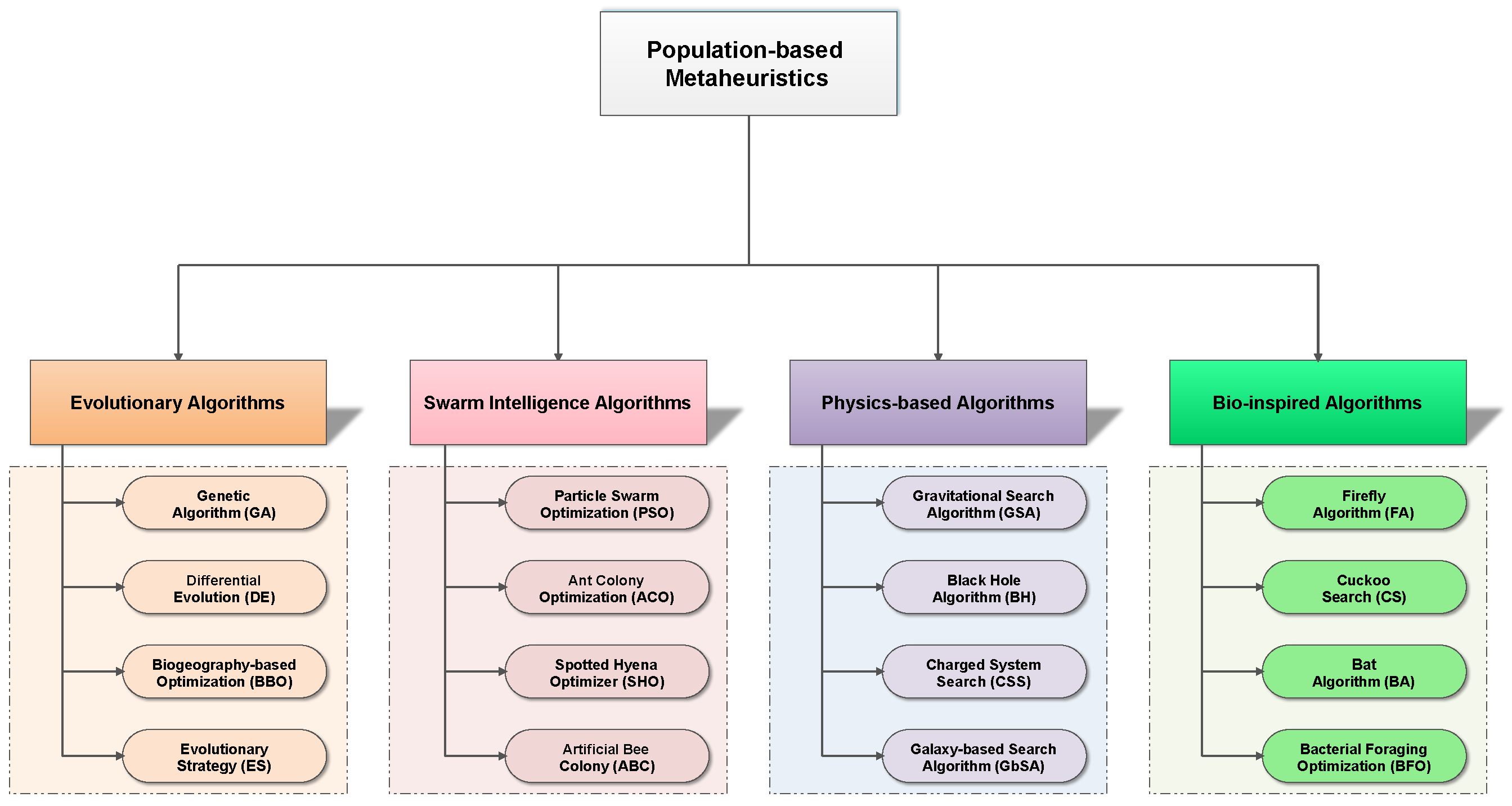
The categorization of population based algorithms is done on the basis of theory of evolutionary algorithms, physics laws based algorithms, swarm intelligence of particles, and biological behavior of bio-inspired algorithms (see
Figure 1). Evolutionary algorithms are inspired by the evolutionary processes such as reproduction, mutation, recombination, and selection. These algorithms are based on the survival fitness of candidate in a population (i.e., a set of solutions) for a given environment. The physics law based algorithms are inspired by physical processes according to some physics rules such as gravitational force, electromagnetic force, inertia force, heating and cooling of materials. Swarm intelligence based algorithms are inspired by the collective intelligence of swarms.
Some of the most popular evolutionary algorithms are Genetic Algorithms (GA) [
6], Evolution Strategy (ES) [
7], Differential Evolution (DE) [
8], and Biogeography-Based Optimizer (BBO) [
9].
A well-known algorithm of swarm intelligence technique is Particle Swarm Optimization (PSO) [
10,
11]. PSO is inspired by the social behavior of fish schooling or bird flocking. Each particle can move around the search space and update its current position with respect to the global best solution. However,
Table 1 shows the other popular optimization based techniques.
Every optimization algorithm needs to address the exploration and exploitation of a search space [
30] and maintains a good balance between exploration and exploitation. The exploration phase investigates the different promising regions in a search space, whereas exploitation searches the close global optimal solutions around the promising regions [
31,
32]. Therefore, to acquire the close optimal solutions, fine-tuning of these two phases is required. Despite the significant number of recently developed optimization algorithms, the question that arises is why do we need to develop more optimization techniques. The answer lies in a No Free Lunch (NFL) theorem [
33]. According to this theorem, the performance of one optimization algorithm for a specific set of problems does not guarantee solving other optimization problems because of their different nature. The NFL theorem allows researchers to propose some novel optimization algorithms for solving the problems in various fields [
34,
35,
36].
This paper presents the recently developed bio-inspired metaheuristic algorithm named the Spotted Hyena Optimizer (SHO) for optimizing constrained problems. As its name implies, SHO mimics the social behaviors of spotted hyenas in nature. The performance of the SHO algorithm is evaluated on designs of optical buffer and airfoil problems. The results reveal that the performance of SHO is more competitive than the existing algorithms.
The rest of this paper is structured as follows:
Section 2 presents the fundamental concepts of a recently developed optimization algorithm.
Section 3 presents the constrained handling approach. The two real-life constrained industrial optimization problems and their comparison are presented in
Section 4 and
Section 5, respectively. Finally, the conclusions are discussed in
Section 6.
3. Constraint Handling
Constraint handling is one of the biggest challenges in solving optimization problems using metaheuristic techniques. There are five constraint handling techniques [
40]: penalty functions, hybrid methods, separation of objective functions and constraints, repair algorithms, and special operators. Among these techniques, the penalty functions are simple and easy to implement. There are numerous penalty functions such as static, annealing, adaptive, co-evolutionary, and death penalty. These approaches convert constraint problems into unconstraint problems by adding some penalty values. In this paper, a static penalty approach is employed to handle constraints in optimization problems:
where
is the modified objective function,
and
are positive penalty values,
and
are constraint functions, and
and
are positive constants. The values of
and
are 1 and 2, respectively. This approach assigns the penalty value for each infeasible solution. In the death penalty approach, a large value is assigned to the objective function of infeasible solution. Therefore, the static penalty function is employed which helps the search agents to move towards the feasible search space of the problem.
Experimental Setup
The parameter settings of metaheuristic algorithms are tabulated in
Table 2. The parameter values of these algorithms are set as they are recommended in their original papers. The experimentation has been done with the Matlab R2014a (8.3.0.532) version in the environment of Microsoft Windows 8.1 using 64 bit Core i-5 processor with 2.40 GHz and 4 GB main memory.
4. Optical Buffer Design Problem
The optical buffer permits the optical CPUs to measure different optical packets by slowing down the group velocity of light. This whole process is executed using the most popular device known as the Photonic Crystal Waveguide (PCW). Generally, PCWs have a lattice-shaped structure with a line defect and holes with different radii that yield the characteristics of slow light. In this subsection, the structure of PCW called a Bragg Slot Photonic Crystal Wave guide (BSPCW) is optimized to achieve these characteristics by the SHO algorithm.
The performance of slow light devices is compared using Delay Bandwidth Product (DBP) and Normalized DBP (NDBP) metrics that are formulated by Equation (
12) [
41]:
where
and
indicate the delay and bandwidth of slow light device, respectively,
where
is the average of group index,
is the bandwidth, and
is the central frequency of light wave. However, NDBP has a relation with group index (
) as:
where
is the dispersion,
v defines the wave vector,
C indicates the velocity of light, and
is responsible for changing in the bandwidth range. The average of
is calculated as follows:
since
has a constant value with maximum fluctuation of ±10% [
42]. The detailed information about PCWs can be found in [
43]. The mathematical formulation of this problem is described in Equation (
16):
There are five constraints defined in this problem for the SHO algorithm. The algorithm is iterated for 30 times and the obtained results are tabulated in
Table 3. The results reveal the substantial improvements of 99% and 10% in bandwidth using the SHO approach in comparison to the results reported by Wu et al. [
44] and GWO [
28], respectively. The similar behavior has been observed in the NDBP. The improvements achieved in NDBP are 90% and 14% as compared with Wu et al. [
44] and GWO [
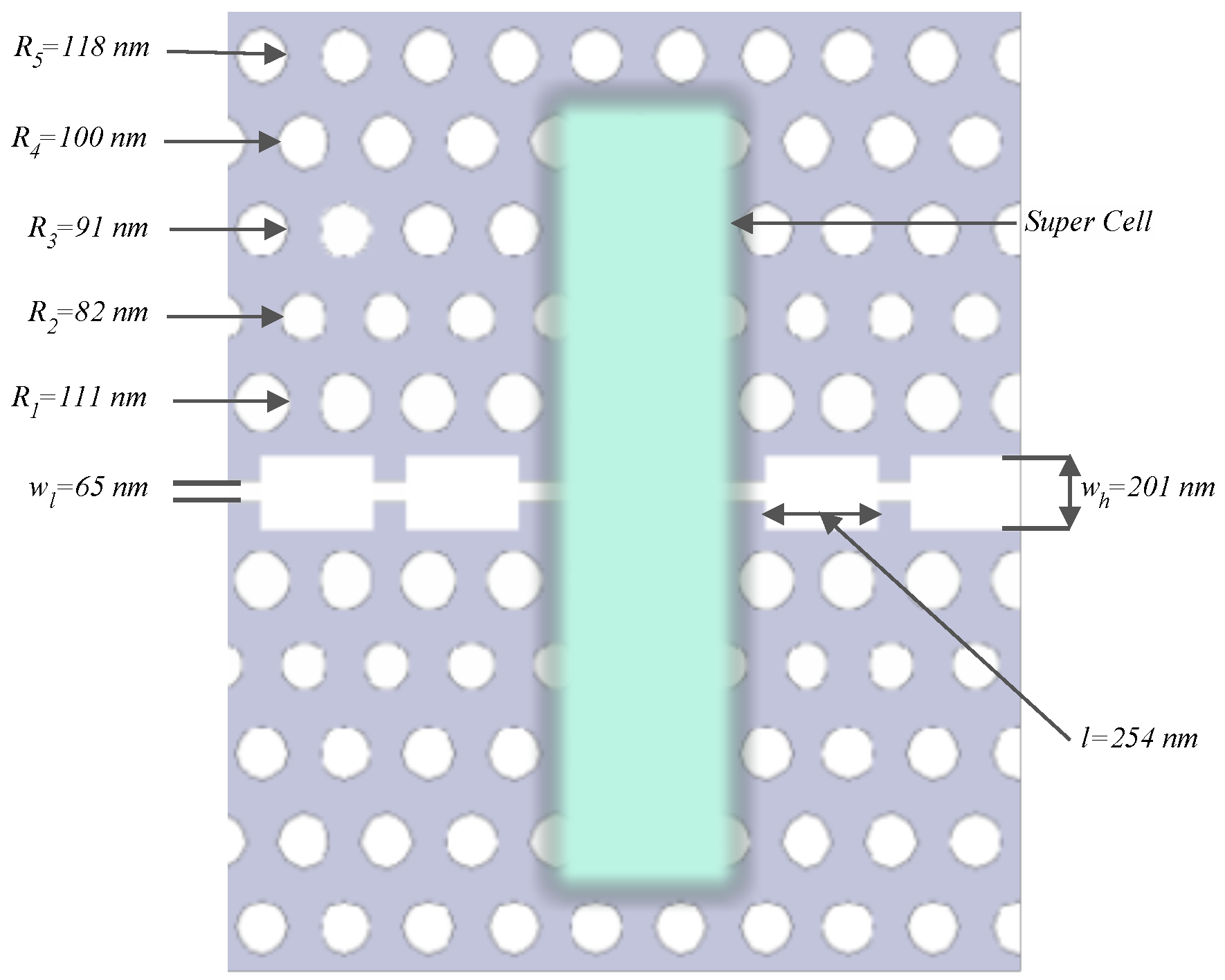
28] approaches, respectively. The optimized super cell is shown in
Figure 3. It shows that the optimized structure has a very good bandwidth without band mixing. The results demonstrate that the SHO algorithm proved its merit for solving the optical buffer optimization problem.
5. Airfoil Design Problem
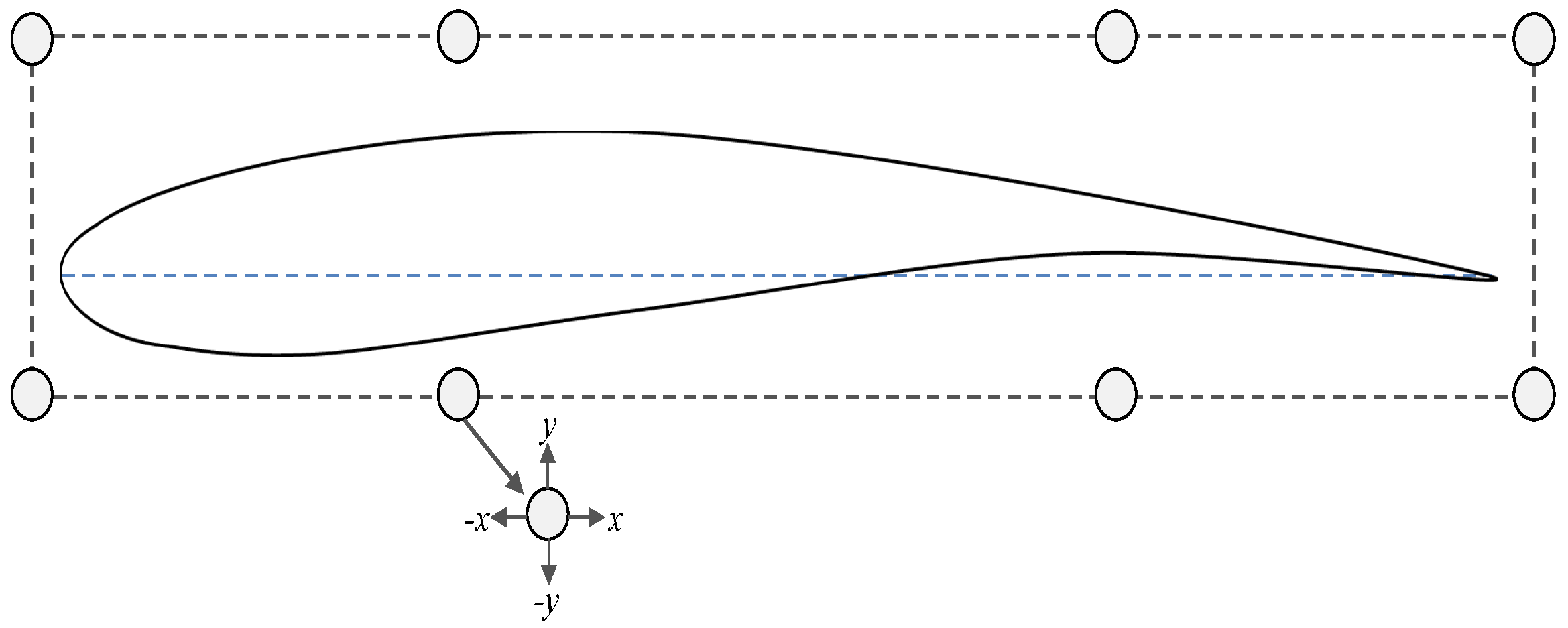
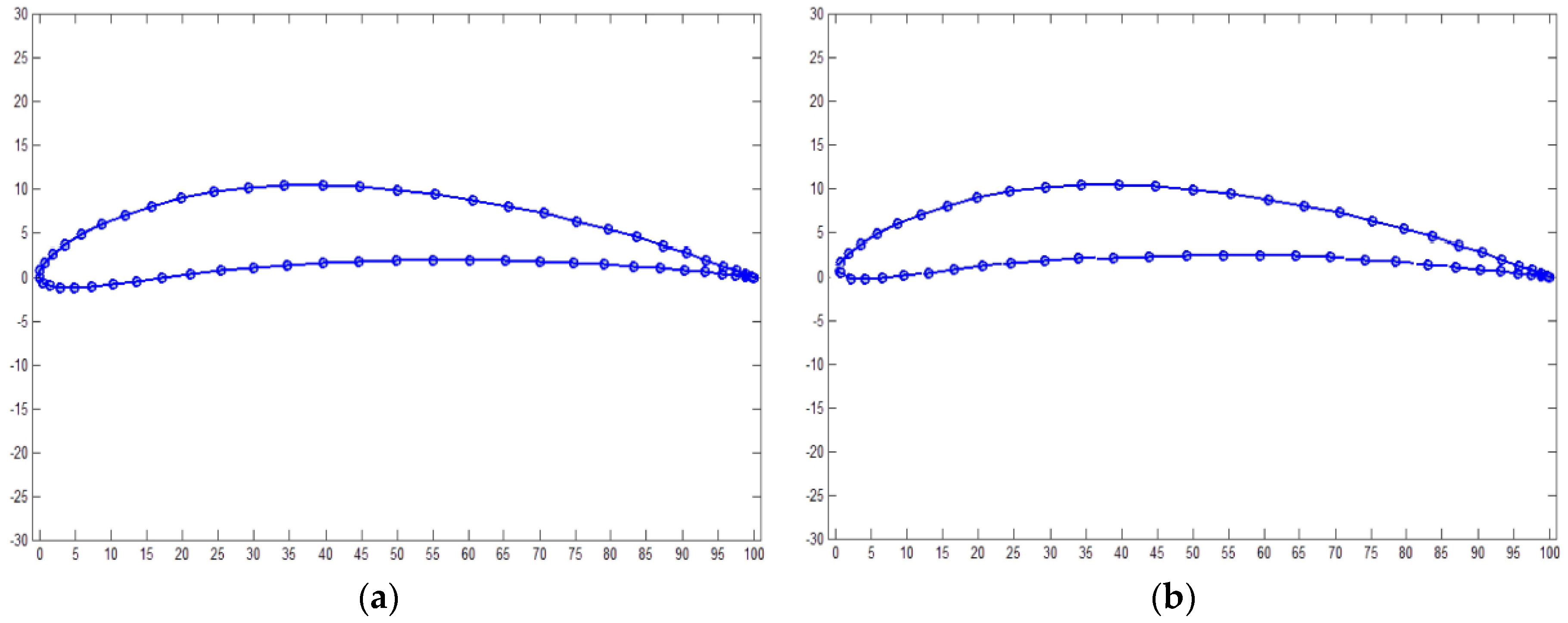
There are two objectives in the airfoil design problem: lift and drag. It has been observed that lifting causes a plane to fly, whereas drag decreases the speed of a plane. Both of these objectives are very important on different occasions. In this section, only the drag is considered to minimize the force and consequently defines the best shape of the wing. The B-spline is utilized to define the shape of an airfoil as shown in
Figure 4. There are eight controlling parameters along with
x-axis and
y-axis directions. The problem formulation of airfoil design is defined by Equation (
17):
where
,
,
is the drag, and set of many constraints
which includes maximum thickness, minimum thickness, and so on. The penalty function is utilized, which is proportional to the level of violation.
where
is a constant and
defines the violation size on the
jth constraint in the set
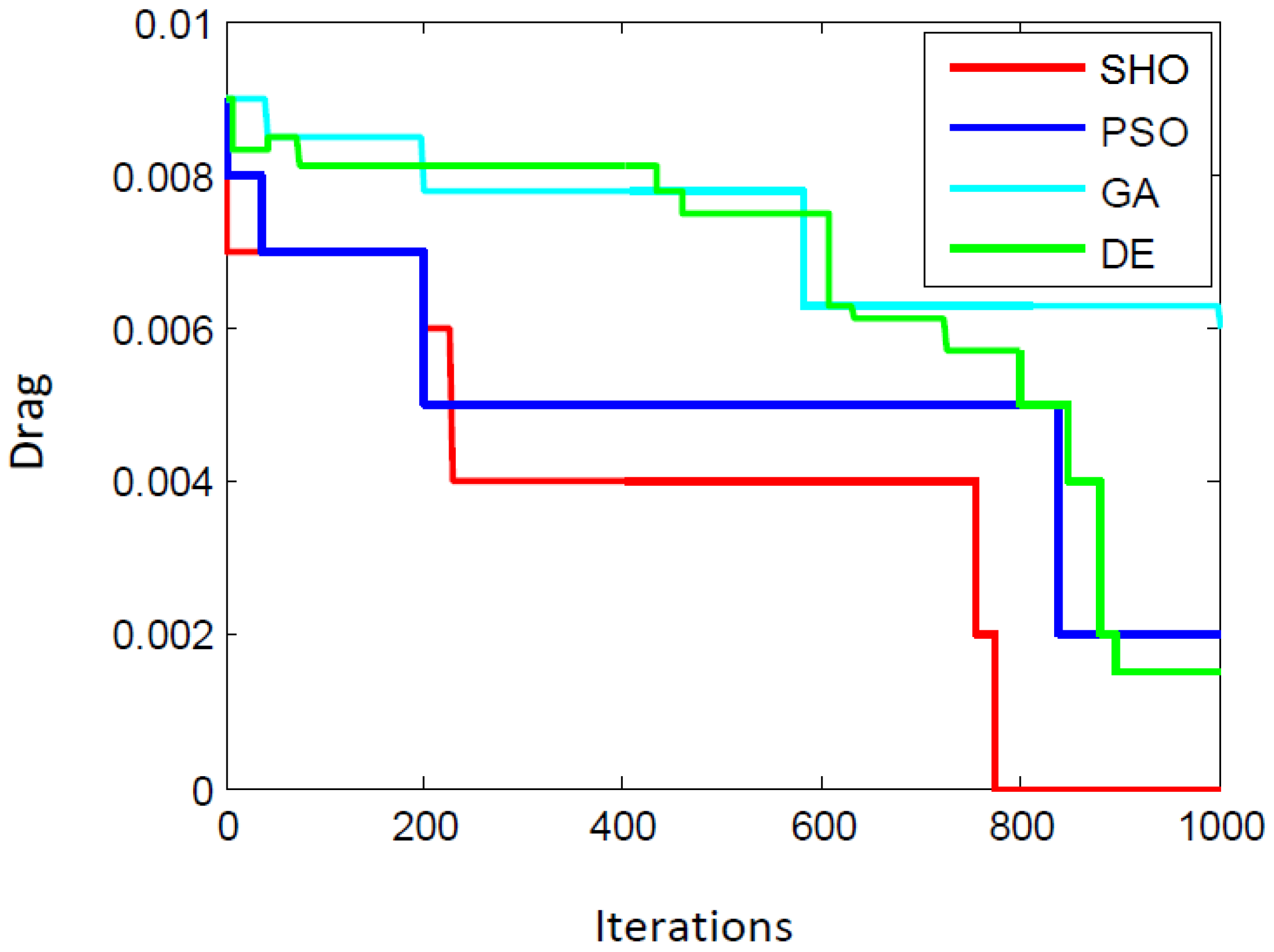
. After performing 1000 iterations and 30 independent runs, the best results and convergence curves are obtained as shown in
Figure 5 and
Figure 6, respectively.
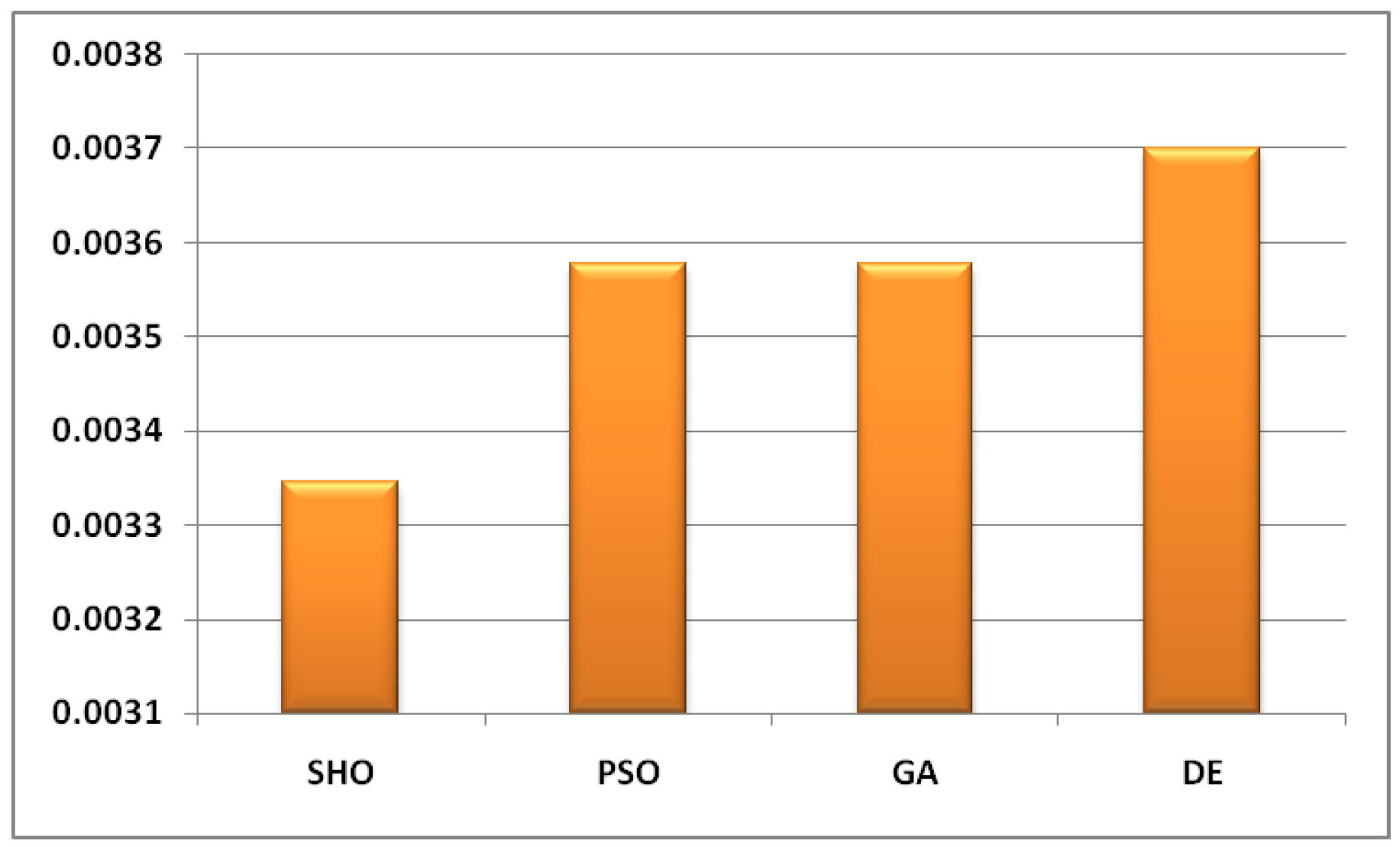
Figure 6 demonstrates that the SHO algorithm performs better than other competitor approaches and improves the airfoil shape to minimize the drag. The standard deviation of this problem obtained by various approaches is shown in
Figure 7.
Table 4 shows the parameters value for the airfoil design problem. The optimum drag force value of SHO as well as other approaches is shown in
Table 5. The results show that the SHO algorithm is able to minimize the drag force value using low computational efforts.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






