
An Improved Extended Kalman Filter for Radar Tracking of Satellite Trajectories



Abstract
:1. Introduction
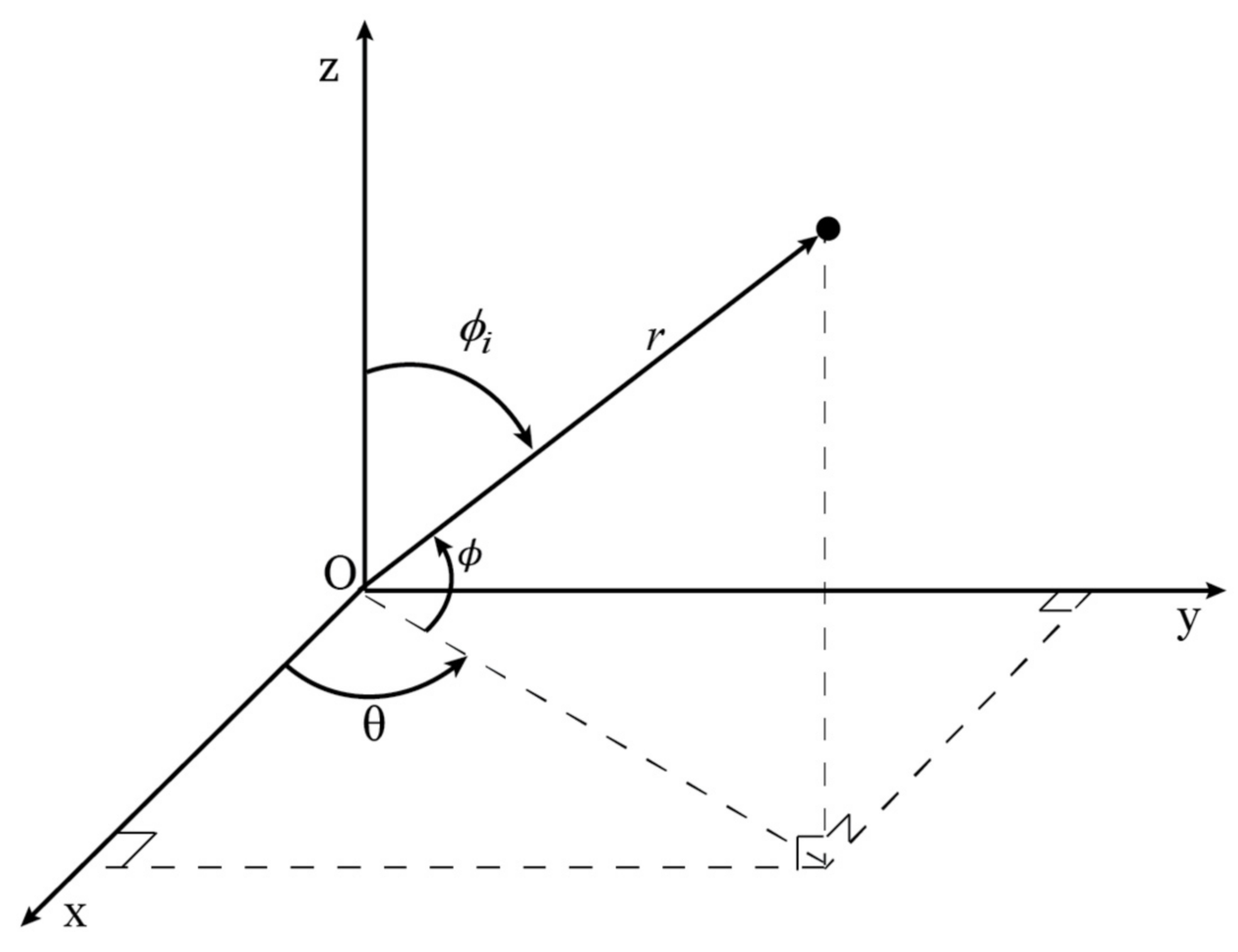
2. Problem Statement
3. Nonlinear Kalman Filters
- Modeling errors because the algorithm assumes models that are only an approximation.
- Incorrect a priori statistics, for example, the a priori covariance matrix.
- Incorrect initial conditions.
- Disturbances that are so large that the linearization becomes inadequate to describe the system accurately enough.
- Errors in computation.
3.1. Extended Kalman Filter
- Initialization:
- Time update equations—Prediction Step:
- Measurement update equations—Correction Step:
3.2. Improved Extended Kalman Filter
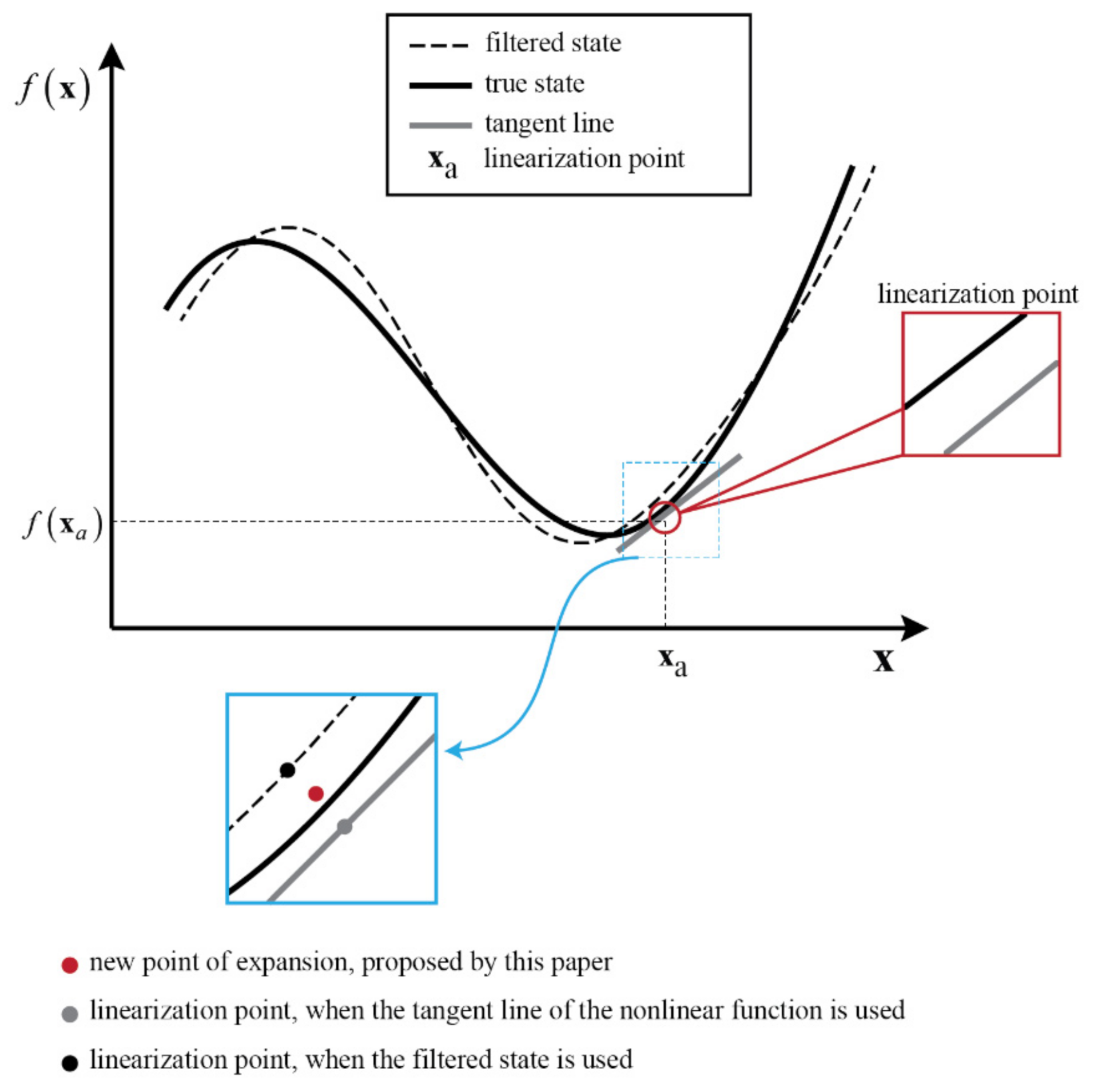
3.2.1. Jacobian Matrix Expansion Point
3.2.2. A Priori Covariance Matrix
3.2.3. Improved Extended Kalman Filter Algorithm
- Initialization:
- Time update equations—Prediction Step:
- Measurement update equations—Correction Step:
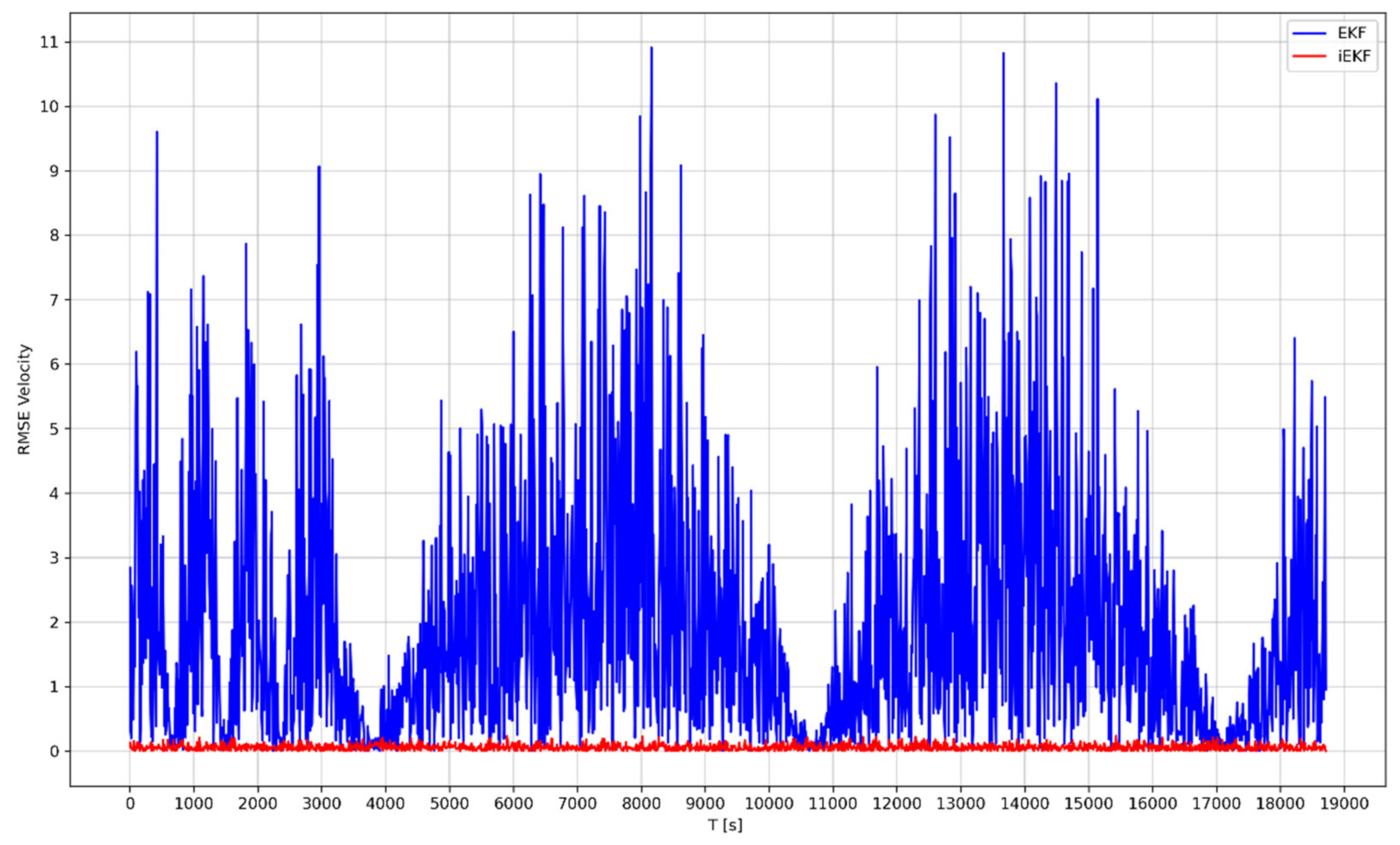
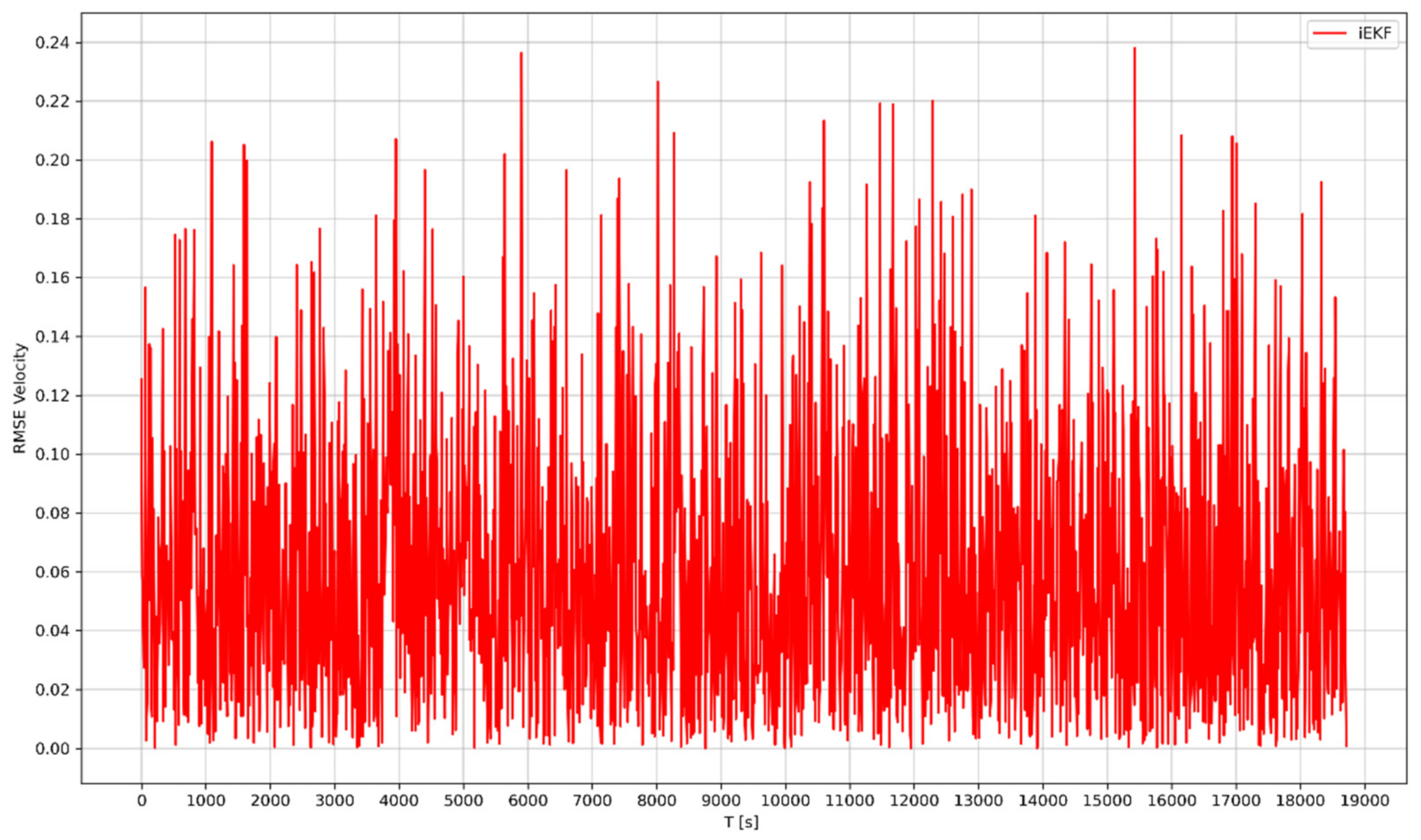
4. Simulations and Discussions
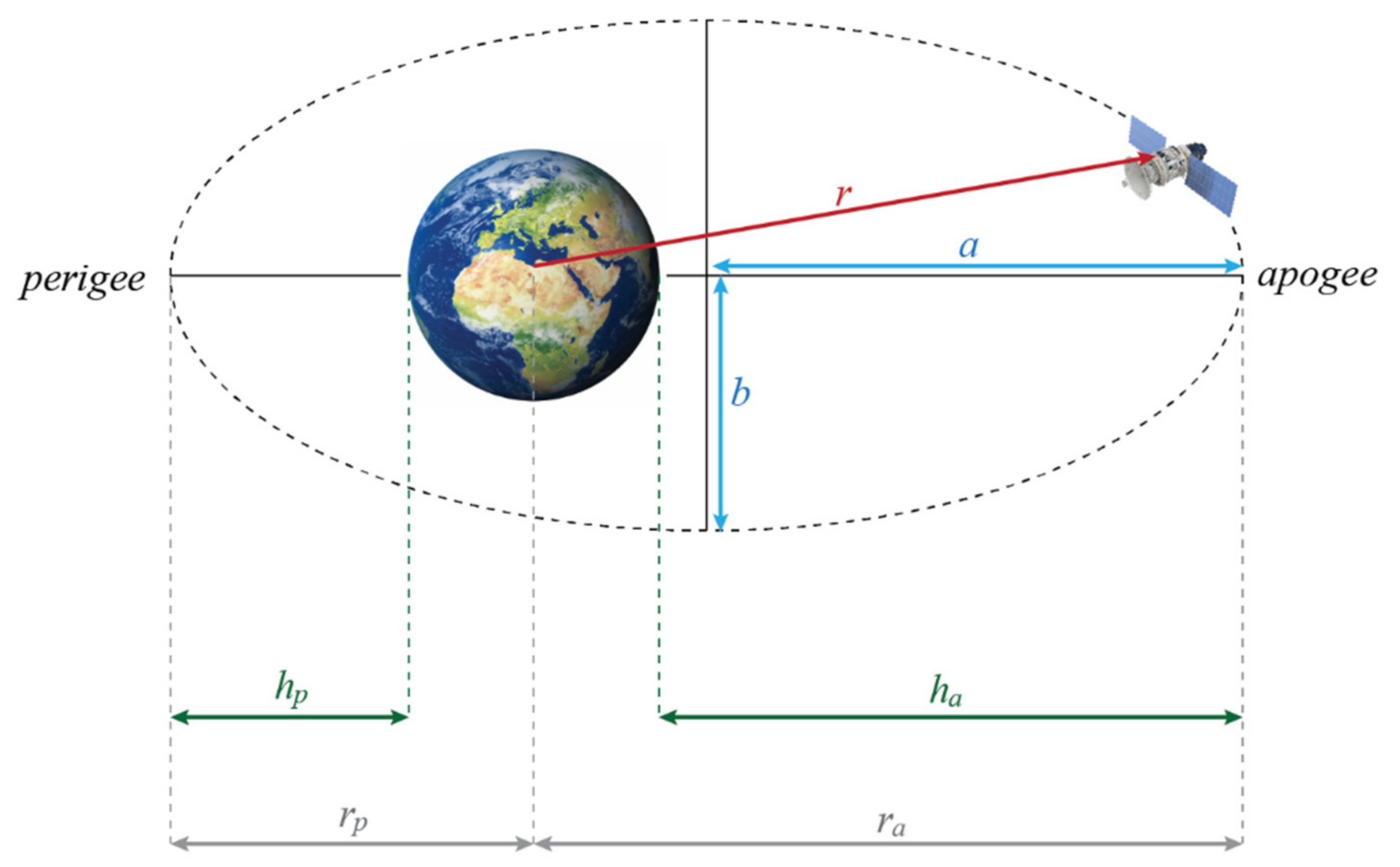
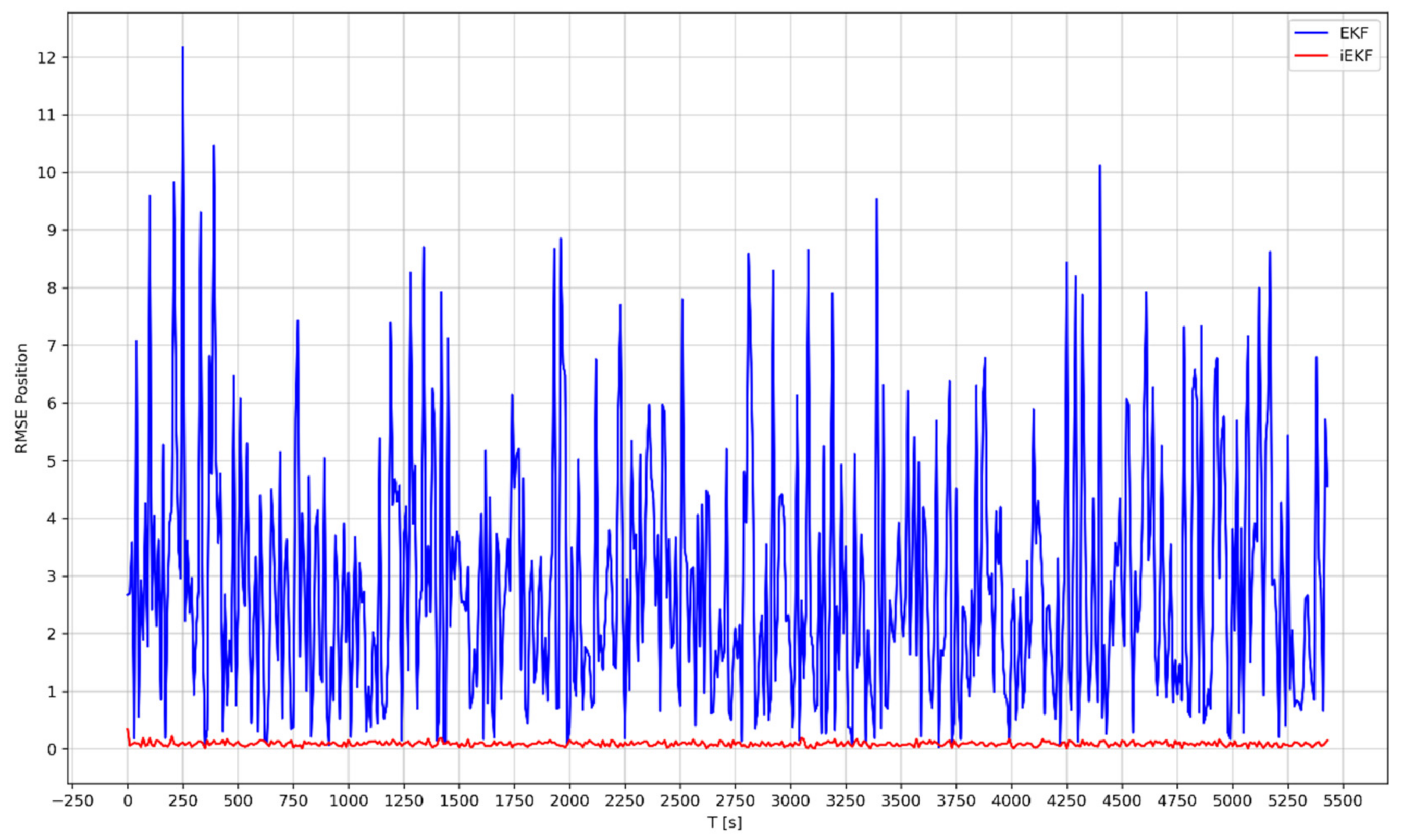
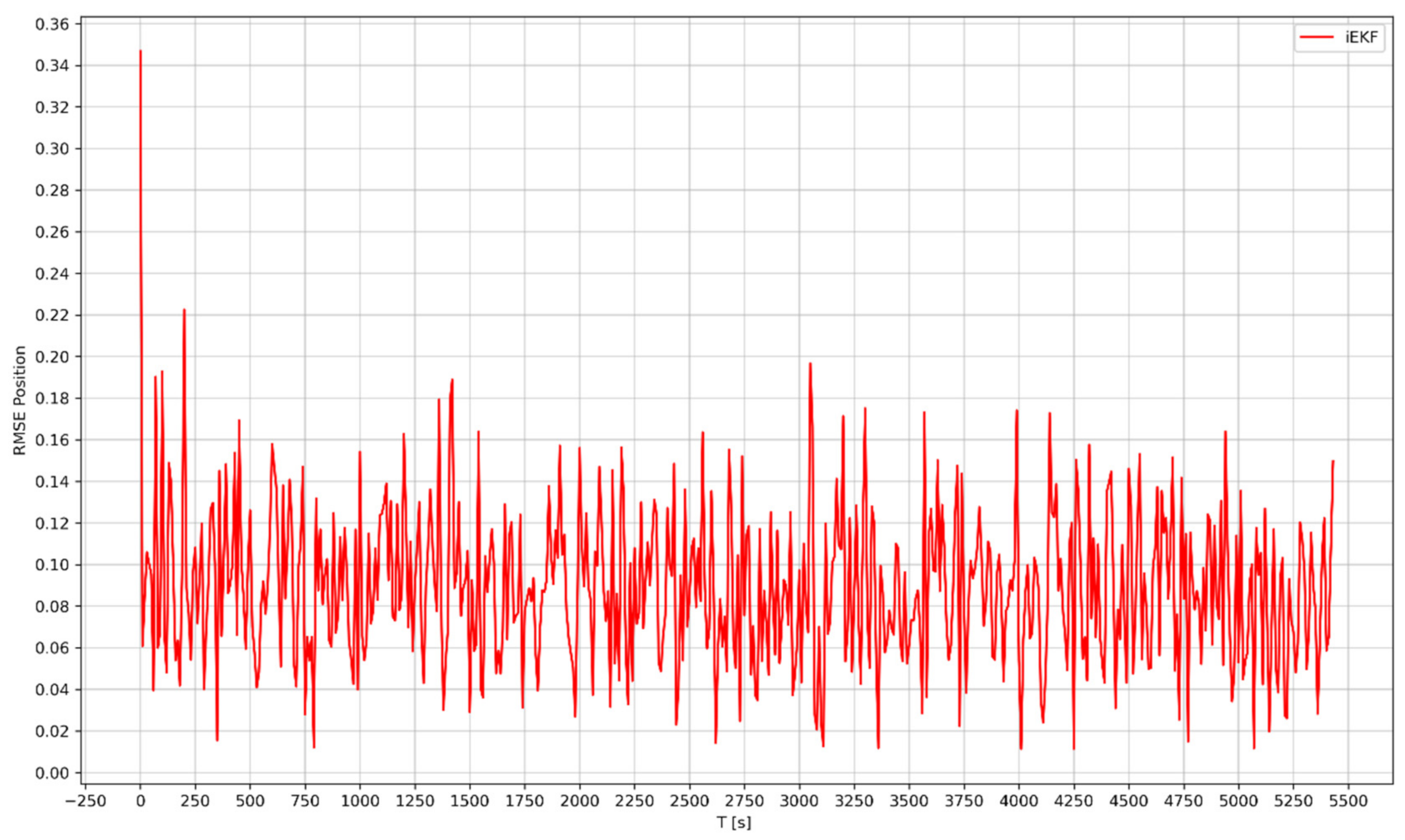
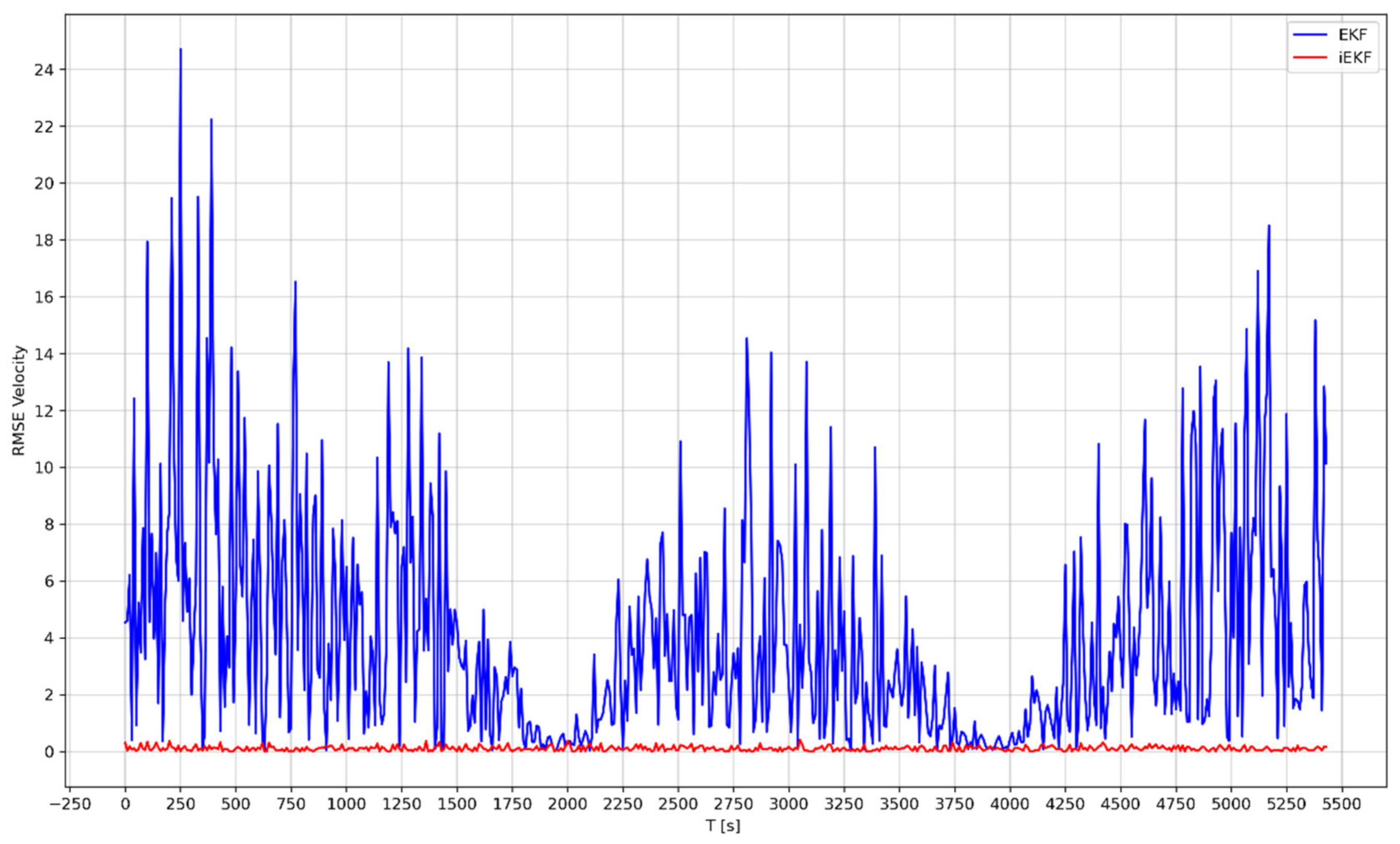
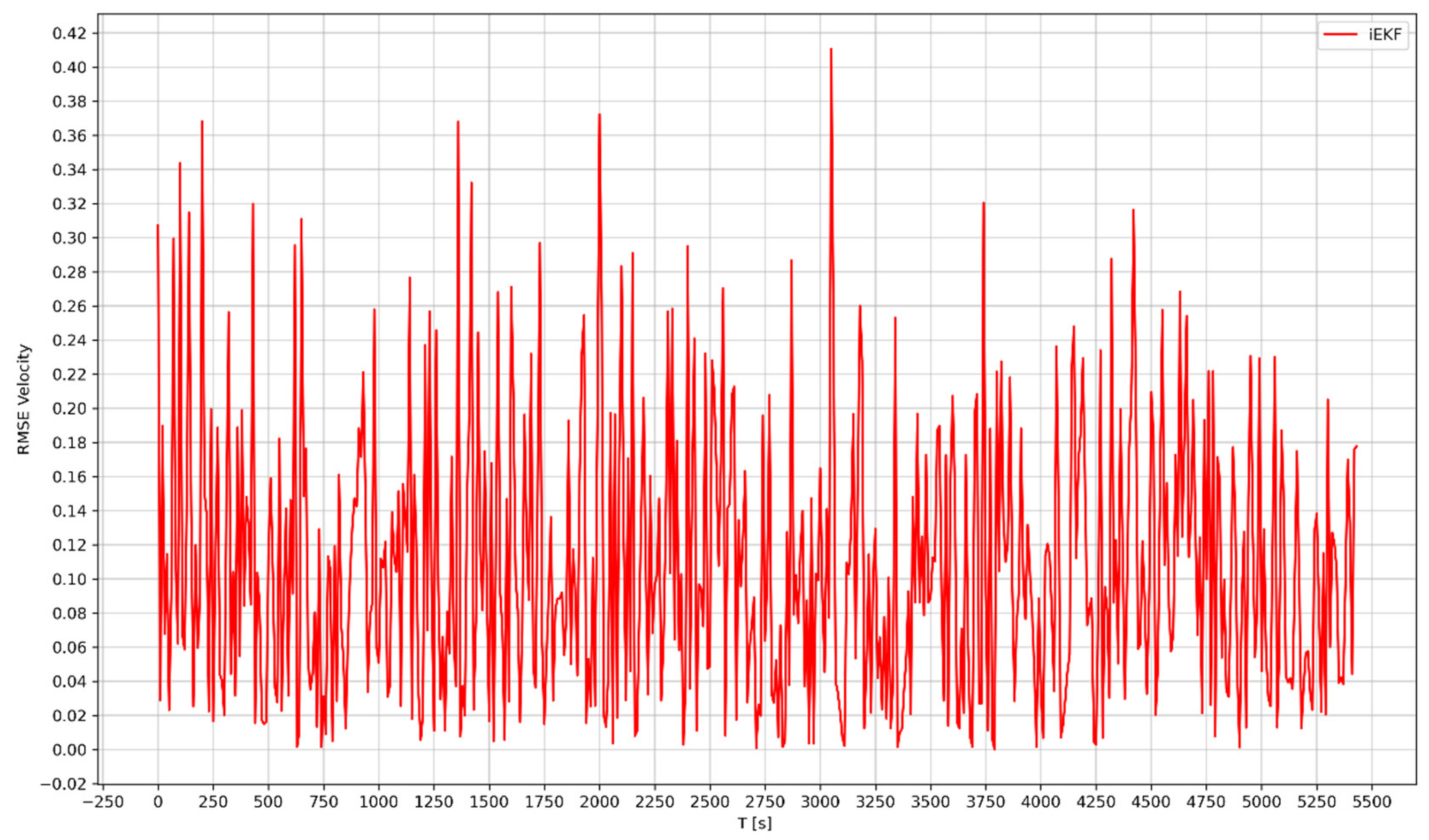
4.1. Case 1: Satellite Orbit Estimation
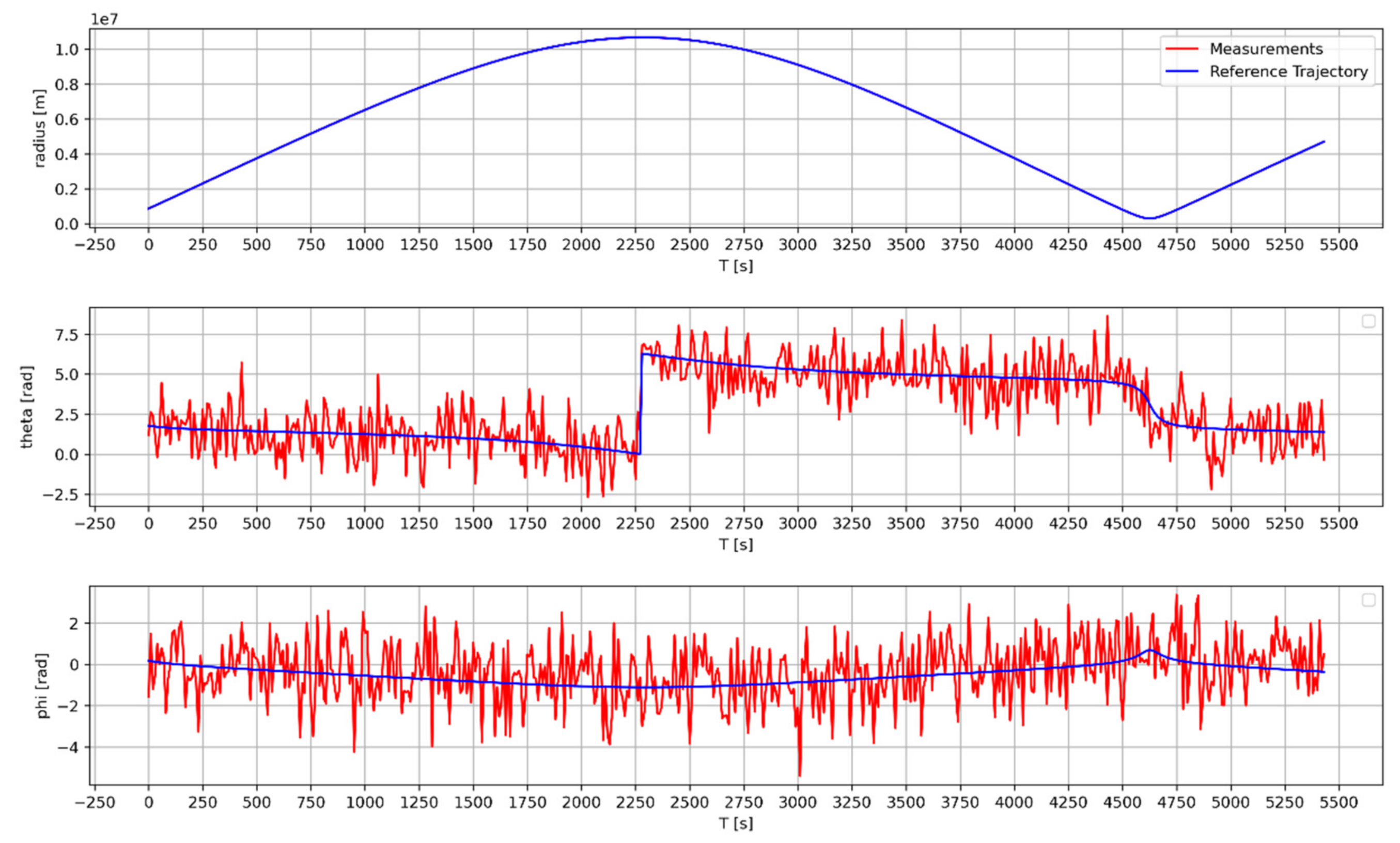
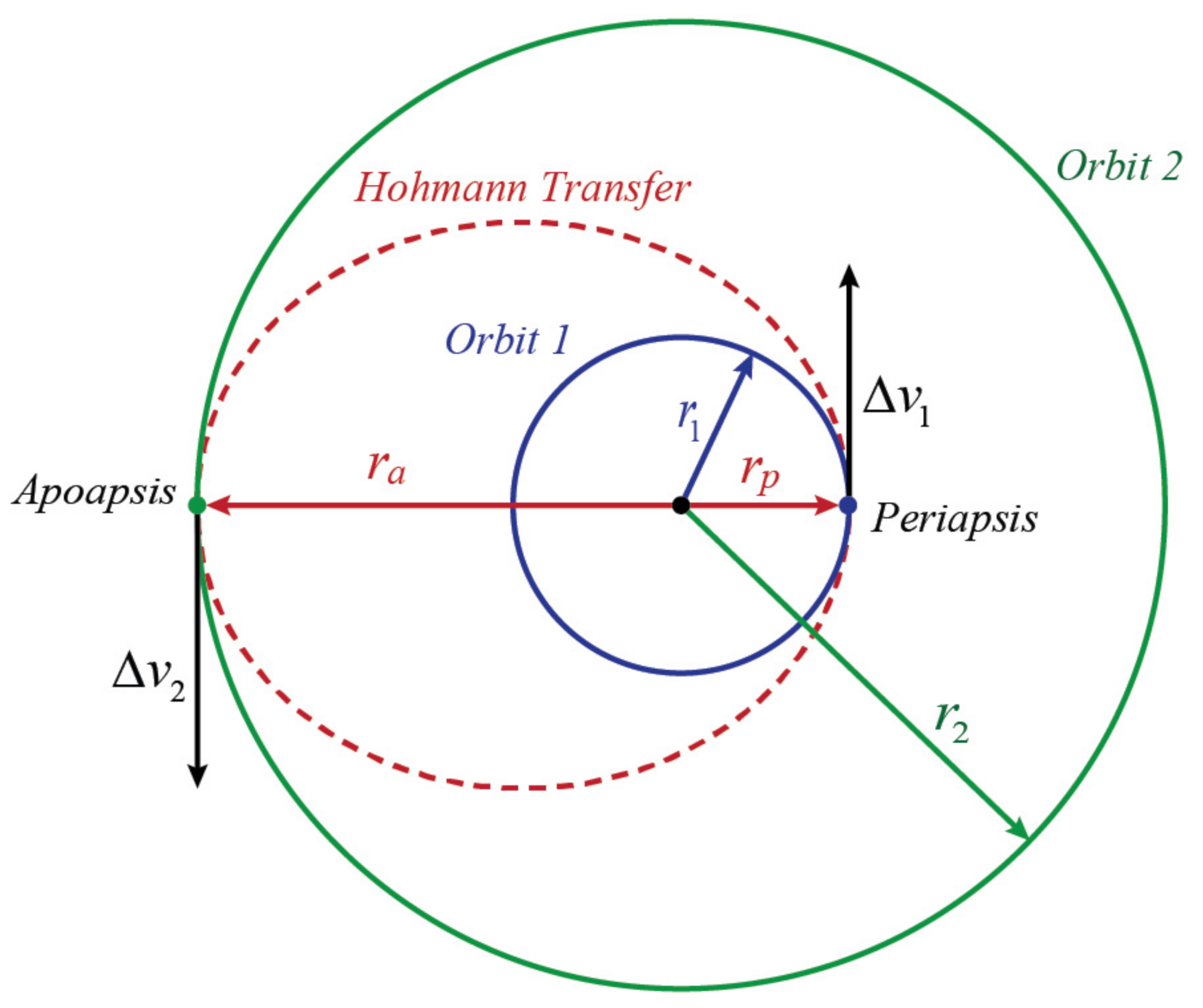
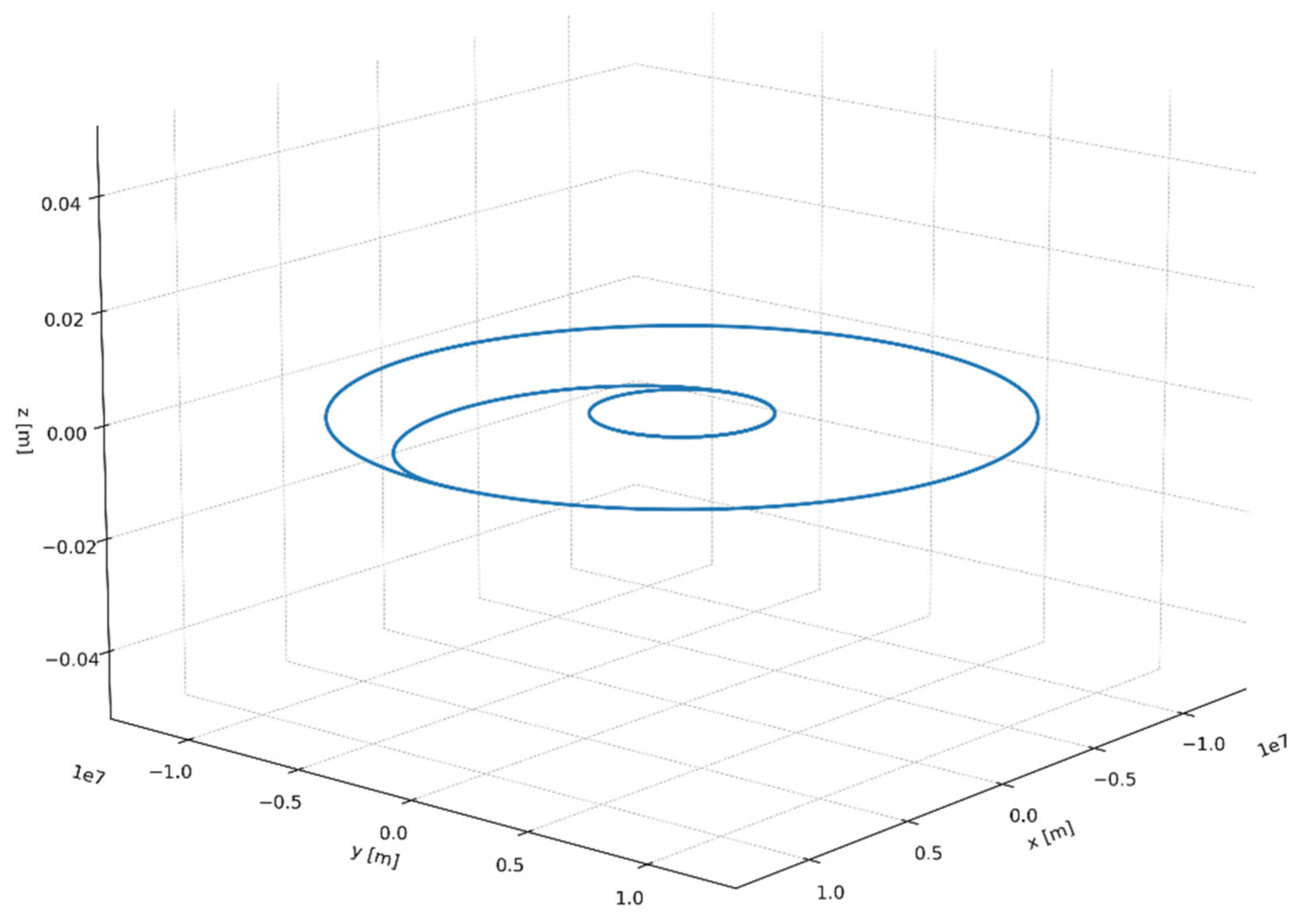
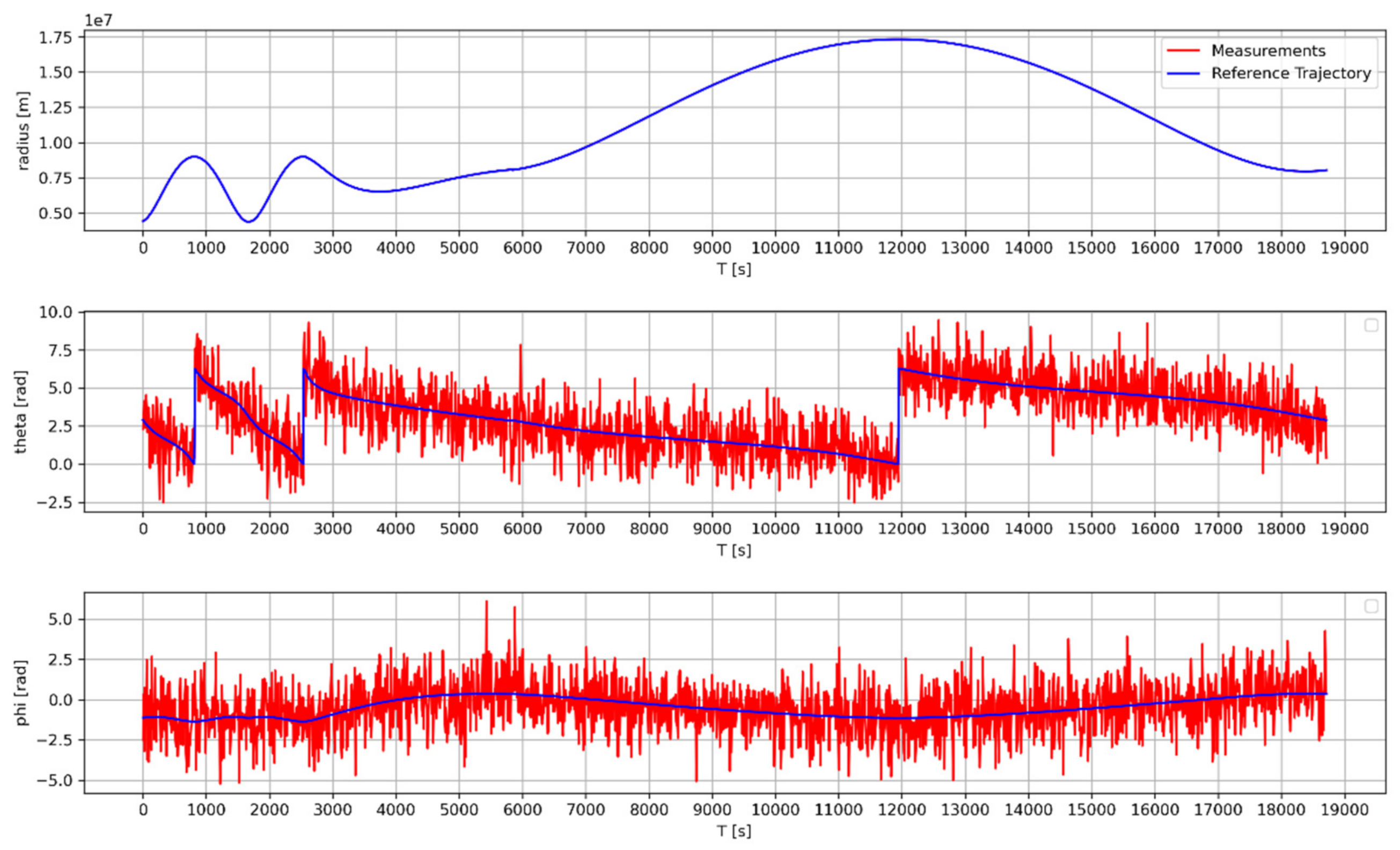
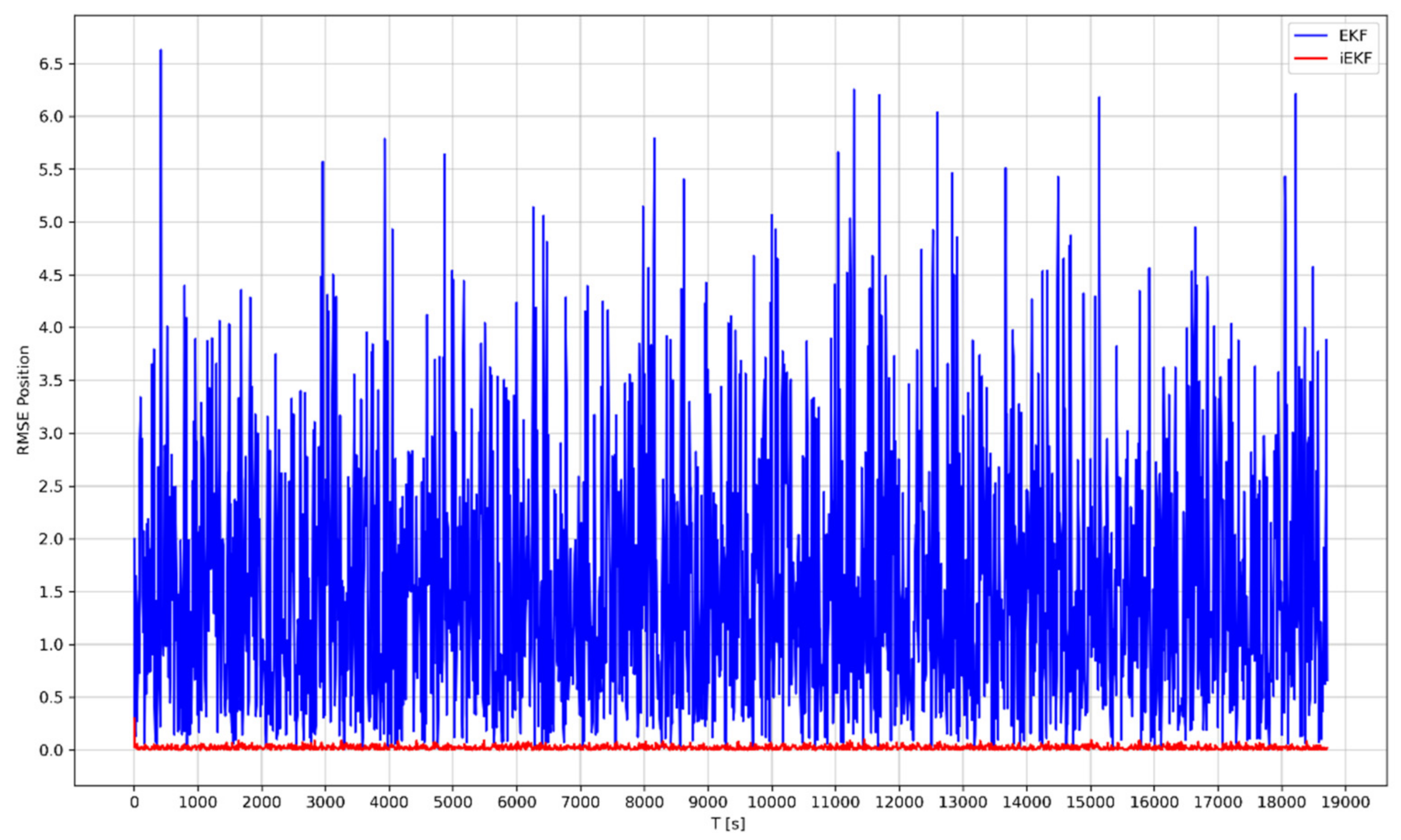
4.2. Case 2: Orbital Maneuvers
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EKF | Extended Kalman Filter |
| HT | Hohmann Transfer |
| iEKF | improved Extended Kalman Filter |
| KF | Kalman Filter |
| RK4 | Runge–Kutta 4th order |
| RMSE | root mean square estimation error |
References
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory, Algorithms and Software; John Wiley & Sons Inc.: New York, NY, USA, 2001; ISBN 978-0-471-41655-5. [Google Scholar]
- Coelho, M.; Bousson, K.; Ahmed, K. Survey of Nonlinear State Estimation in Aerospace Systems with Gaussian Priors. Adv. Aircr. Spacecr. Sci. 2020, 7, 495–516. [Google Scholar] [CrossRef]
- Raol, J.R.; Gopalratnam, G.; Twala, B. Nonlinear Filtering—Concepts and Engineering Application; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: Abingdon, UK, 2017; ISBN 978-1-4987-4517-8. [Google Scholar]
- Ristic, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman Filter—Particle Filters for Tracking Applications; Artech House: Boston, MA, USA, 2004; ISBN 978-1-58053-631-8. [Google Scholar]
- Ahmed, M.; Subbarao, K. Target Tracking in 3-D Using Estimation Based Nonlinear Control Laws for UAVs. Aerospace 2016, 3, 5. [Google Scholar] [CrossRef]
- Atmeh, G.; Subbarao, K. Guidance, Navigation and Control of Unmanned Airships under Time-Varying Wind for Extended Surveillance. Aerospace 2016, 3, 8. [Google Scholar] [CrossRef] [Green Version]
- Chandra, K.P.B.; Gu, D.W. Nonlinear Filtering—Methods and Applications; Springer: Cham, Switzerland, 2019; ISBN 978-3-030-01797-2. [Google Scholar]
- Wiener, N. Extrapolation, Interpolation and Smoothing of Stationary Time Series with Engineering Applications; The MIT Press: Cambridge, MA, USA, 1949; ISBN 978-0-262-23002-5. [Google Scholar]
- Kolmogorov, A.N.; Doyle, W.L.; Selin, I. Interpolation and Extrapolation of Stationary Random Sequences; Doyle, W.; Selin, J., Translators; Bulletin of acad. Sci., Math. Series; USSR; Rand Corporation: Santa Monica, CA, USA, 1941; Volume 5, RM-3090-PR. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Grewal, M.S.; Andrews, A.P. Applications of Kalman Filtering in Aerospace: 1960 to the Present. IEEE Control Syst. Mag. 2010, 30, 69–78. [Google Scholar] [CrossRef]
- Schmidt, S.F. The Kalman Filter—Its Recognitions and Development for Aerospace Applications. J. Guid. Control Dyn. 1981, 4, 4–7. [Google Scholar] [CrossRef]
- Maybeck, P.S. Stochastic Models, Estimation and Control; Academic Press Inc.: New York, NY, USA, 1982; ISBN 0-12-480703-8. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill, Department of Computer Science: Chapel Hill, NC, USA, 2001. [Google Scholar]
- Kalman, R.E.; Bucy, R.S. New Results in Linear Filtering and Prediction Theory. J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef]
- Tanizaki, H. Nonlinear Filters: Estimation and Applications, 2nd ed.; Springer: Berlin, Germany, 1996; ISBN 978-3-662-03223-7. [Google Scholar]
- Pakki, B.C.K. Nonlinear State Estimation Algorithms and Their Applications. Ph.D. Thesis, University of Leicester, Leicester, UK, 2012. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New Extension of the Kalman Filter to Nonlinear Systems. In Proceedings of the SPIE 3068, Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 28 July 1997. [Google Scholar] [CrossRef]
- St-Pierre, M.; Gingras, D. Comparison between the unscented Kalman filter and the extended Kalman filter for the position estimation module of an integrated navigation information system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 831–835. [Google Scholar] [CrossRef]
- Zhang, X.C.; Guo, C.J. Cubature Kalman Filters: Derivation and Extension. Chin. Phys. B 2013, 22, 128401–128406. [Google Scholar] [CrossRef]
- Kulikov, Y.G.; Kulikova, M.V. The Accurate Continuous-Discrete Extended Kalman Filter for Radar Tracking. IEEE Trans Signal Process. 2016, 64, 948–958. [Google Scholar] [CrossRef]
- Kulikov, G.Y.; Kulikova, M.V. Accurate continuous–discrete unscented Kalman filtering for estimation of nonlinear continuous-time stochastic models in radar tracking. Signal Process. 2017, 139, 25–35. [Google Scholar] [CrossRef]
- Bordonaro, S.; Willett, P.; Bar-Shalom, Y.; Luginbuhl, T. Converted Measurement Sigma Point Kalman Filter for Bistatic Sonar and Radar Tracking. IEEE Trans. Aero Electron. Syst. 2019, 55, 147–159. [Google Scholar] [CrossRef]
- Ding, Z.; Balaji, B. Comparison of the unscented and cubature Kalman filters for radar tracking applications. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), Glasgow, UK, 22–25 October 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Kim, T.; Park, T.H. Extended Kalman Filter (EKF) Design for Vehicle Position Tracking Using Reliability Function of Radar and Lidar. Sensors 2020, 20, 4126. [Google Scholar] [CrossRef] [PubMed]
- Julier, S.; Uhlmann, J.K.; Durrant-Whyte, H.F. A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators. IEEE Trans. Automat Contr. 2000, 45, 477–482. [Google Scholar] [CrossRef] [Green Version]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filtering for Continuous-Discrete Systems: Theory and Simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Huang, W.; Xie, H.; Shen, C.; Li, J. A Robust Strong Tracking Cubature Kalman Filter for Spacecraft Attitude Estimation with Quaternion Constraint. Acta Astron. 2016, 121, 153–163. [Google Scholar] [CrossRef]
- Gao, Z.; Mu, D.; Zhong, Y.; Gu, C.; Ren, C. Adaptively Random Weighted Cubature Kalman Filter for Nonlinear Systems. Math. Probl. Eng. 2019, 2019, 4160847. [Google Scholar] [CrossRef]
- Katzfuss, M.; Stroud, J.R.; Wikle, C.K. Understanding the Ensemble Kalman Filter. Am. Stat. 2016, 70, 350–357. [Google Scholar] [CrossRef]
- Simon, D. From here to infinity. Embed. Syst. Programm. 2001, 14, 20–32. [Google Scholar]
- Coelho, M.; Bousson, K.; Ahmed, K. An Improved Extended Kalman Filter for Nonlinear State Estimation. In Proceedings of the Aerospace Europe Conference, Bordeaux, France, 25–28 February 2020. [Google Scholar]
- Doumiati, M.; Charara, A.; Victorino, A.; Lechner, D. Vehicle Dynamics Estimation Using Kalman Filtering; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2013; ISBN 9781118578988. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H∞ and Nonlinear Approaches; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006; ISBN 978-0-471-70858-2. [Google Scholar]
- Zhao, Z.; Chen, H.; Chen, G.; Kwan, C.; Rong Li, X. Comparison of several ballistic target tracking filters. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 July 2006. [Google Scholar] [CrossRef]
- Park, J.U.; Choi, K.H.; Lee, S. Orbital Rendezvous using two-step Sliding Mode Control. Aerosp. Sci. Technol. 1999, 3, 239–245. [Google Scholar] [CrossRef]
- Wambecq, A. Rational Runge-Kutta methods for solving systems of ordinary differential equations. Computing 1978, 20, 333–342. [Google Scholar] [CrossRef]
- Zingg, D.W.; Chisholm, T.T. Runge–Kutta methods for linear ordinary differential equations. Appl. Numer. Math 1999, 31, 227–238. [Google Scholar] [CrossRef]
- Son, E.; Lim, D.W.; Ahn, J.; Shin, M.; Chun, S. Comparison of Numerical Orbit Integration between Runge-Kutta and Adams-Bashforth-Moulton using GLObal NAvigation Satellite System Broadcast Ephemeris. J. Posit. Nav. Timing 2019, 8, 201–208. [Google Scholar] [CrossRef]
- Somodi, B.; Földváry, L. Application of numerical integration techniques for orbit determination of state-of-the-art LEO satellites. Period. Polytech. Civ. Eng. 2011, 55, 99–106. [Google Scholar] [CrossRef] [Green Version]
- Curtis, H.D. Orbital Mechanics for Engineering Students, 4th ed.; Butterworth-Heinemann—Elsevier: Oxford, UK, 2020; ISBN 978-0-08-102133-0. [Google Scholar]
- Ruiter, A.H.J.; Damaren, C.J.; Forbes, J.R. Spacecraft Dynamics, and Control—An Introduction; John Wiley & Sons Ltd.: West Sussex, UK, 2013; ISBN 978-1-11-840330-3. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Perigee Height | ||
| Apogee Height | ||
| Perigee Radius | ||
| Apogee Radius | ||
| Semi Major-Axis | ||
| Orbit Eccentricity | ||
| Orbit Inclination | ||
| Orbit Period |
| Parameter | Symbol | Value |
|---|---|---|
| Initial Orbit—Orbit 1 | ||
| Radius | ||
| Orbit Eccentricity | ||
| Orbit Inclination | ||
| Transfer Orbit | ||
| Perigee Radius | ||
| Apogee Radius | ||
| Semi Major-Axis | ||
| Orbit Eccentricity | ||
| Orbit Inclination | ||
| Orbit Period | ||
| Final Orbit—Orbit 2 | ||
| Radius | ||
| Orbit Eccentricity | ||
| Orbit Inclination | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coelho, M.d.F.; Bousson, K.; Ahmed, K. An Improved Extended Kalman Filter for Radar Tracking of Satellite Trajectories. Designs 2021, 5, 54. https://doi.org/10.3390/designs5030054
Coelho MdF, Bousson K, Ahmed K. An Improved Extended Kalman Filter for Radar Tracking of Satellite Trajectories. Designs. 2021; 5(3):54. https://doi.org/10.3390/designs5030054
Chicago/Turabian StyleCoelho, Milca de Freitas, Kouamana Bousson, and Kawser Ahmed. 2021. "An Improved Extended Kalman Filter for Radar Tracking of Satellite Trajectories" Designs 5, no. 3: 54. https://doi.org/10.3390/designs5030054
APA StyleCoelho, M. d. F., Bousson, K., & Ahmed, K. (2021). An Improved Extended Kalman Filter for Radar Tracking of Satellite Trajectories. Designs, 5(3), 54. https://doi.org/10.3390/designs5030054