Cyclists at Roundabouts: Risk Analysis and Rational Criteria for Choosing Safer Layouts




Abstract
:1. Introduction
- “conventional”, with an external diameter between 40 and 50 m;
- “compact”, with an external diameter between 25 and 40 m;
- “mini”, with an external diameter between 14 and 25 m.
2. Data and Methods
- -
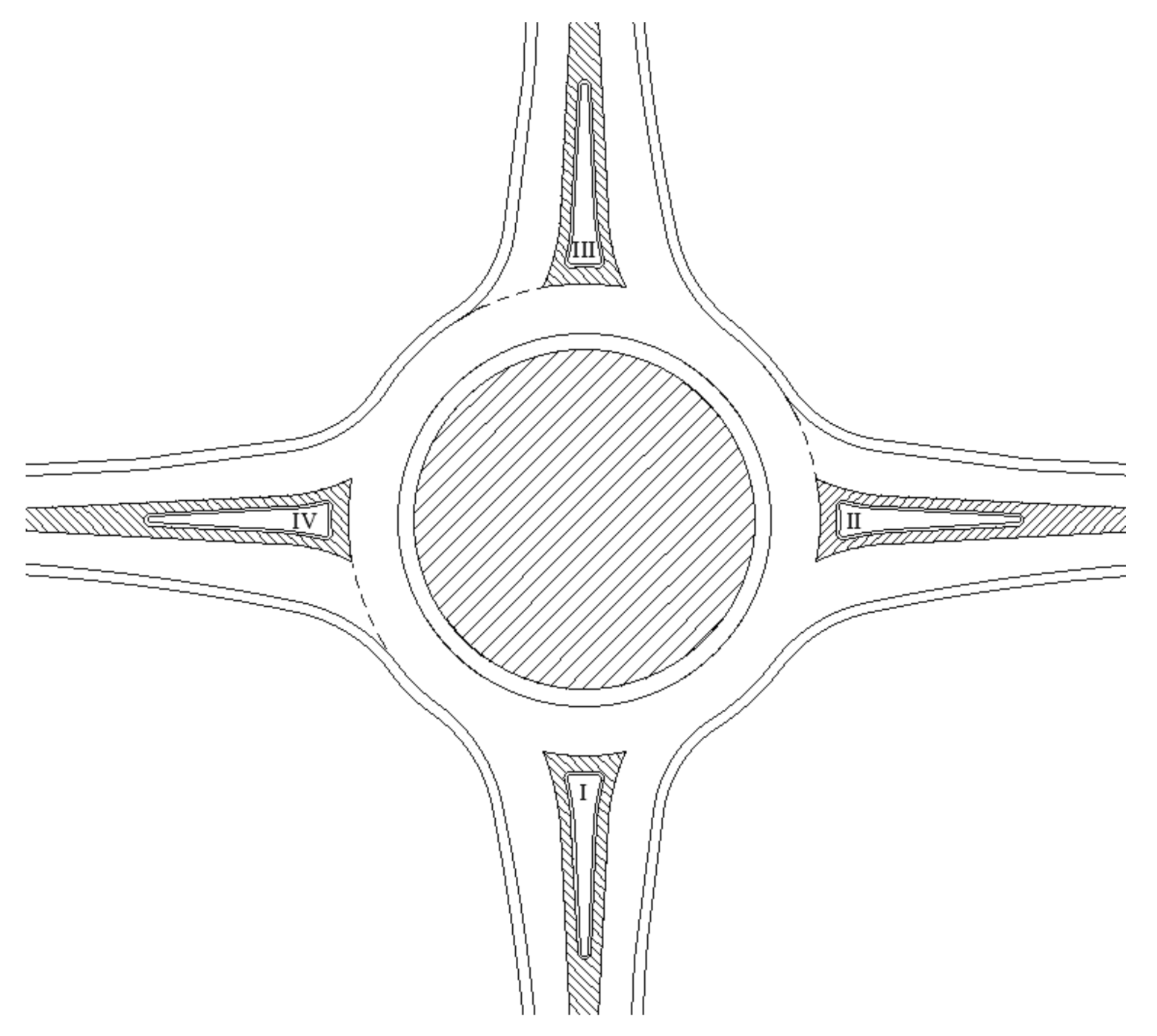
- the index i, running from 1 to 8, to define the position of the in the roundabout;
- -
- the index , to identify the arm of the roundabout whose traffic flows affect the risk of accident in the considered ;
- -
- the categorical index k, taking as values m or d, for merging and diverging points, respectively.
- -
- a probability model, which takes into account the randomness related to the perception and the decisions of the road users at intersection and the consequential strategies;
- -
- a damage model, which is concerned with the fact that both motor vehicles and bicycles occupy the same spaces and, at the same time, vary their speed and direction while performing their trajectories.
- -
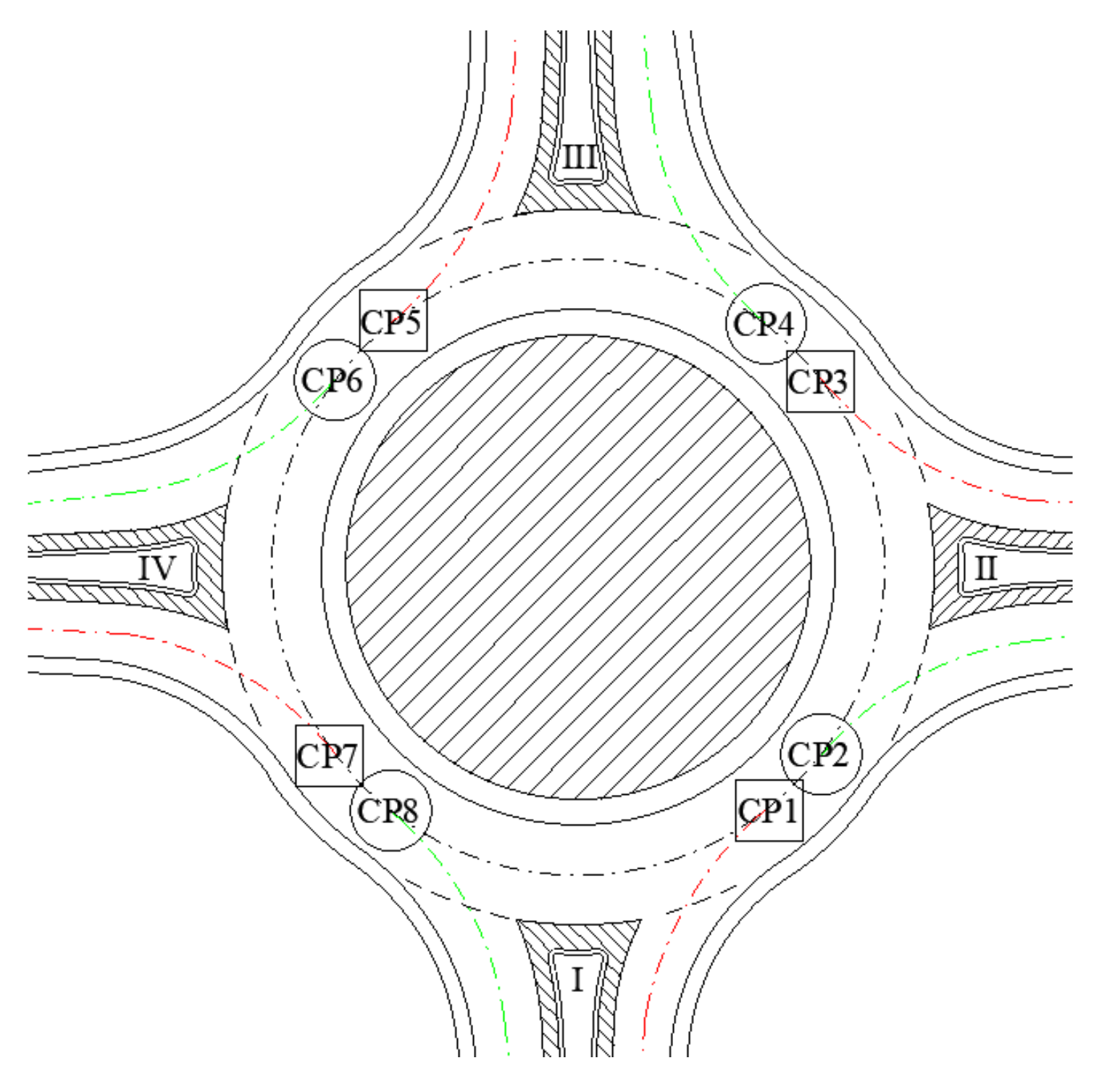
- two categories of CP, that are merging or diverging, denoted by the categorical index (cf. Figure 3);
- -
- the traffic flow distributions in the roundabout characterizing each type of CP.
- -
- is the probability of having at least a circulating vehicle within the elementary unit of exposure. The intensity depends on Qj;V,C, the number of circulating vehicles per hour related to the -th arm;
- -
- is the probability of having at least a circulating bike within the elementary unit of exposure. The intensity depends on Qj;B,C, the number of circulating bikes per hour related to the -th arm;
- -
- is the probability of having at least an entering vehicle within the elementary unit of exposure. The intensity depends on Qj;V,e, the number of vehicles entering the roundabout per hour related to the -th arm;
- -
- is the probability of having at least an entering vehicle within the elementary unit of exposure. The intensity depends on Qj;B,e, the number of vehicles entering the roundabout per hour related to the -th arm.
- -
- and have been discussed above;
- -
- is the probability to have at least a vehicle leaving the roundabout at the -th point, within the elementary unit of exposure. The intensity depends on Qj;V,o, the number of vehicles exiting the roundabout per hour at the -th arm.
- -
- is the probability of having at least a bike leaving the roundabout at the -th point within the elementary unit of exposure. The intensity depends on Qj;B,o, the number of bikes exiting the roundabout per hour at the -th arm.
- Layout 1 (L1) has an external roundabout for cyclists (named roundabike by the authors). Therefore, a single-lane rotatory bike path has been added to the starting layout: it requires large urbanistic spaces; no cycle paths are in the approaching arms;
- Layout 2 (L2) has a roundabike whose external circumference coincides with that of the current roundabout: it implies a reduction of the current RAD to maintain the intersection in the current spaces; no cycle paths are in the approaching arms;
- Layout 3 (L3) differs from L1 for the presence of a cycle path in all the approaching arms;
- Layout 4 (L4) differs from L2 for the presence of a cycle path in all the approaching arms;
- Layouts 5 to 9 (L5 to L9) have the same geometrical configuration of L0 to L4, but they differ from L0 to L4 for the cyclists traffic volume (+10% volume surveyed during the current pandemic crisis);
- Layouts 10 to 14 (L10 to L14) have the same geometrical configuration of L0 to L4, but they differ from L5 to L9 for the cyclists traffic volume (+30% volume expected as consequence of the current pandemic crisis).
3. Results
- -
- for merging CPs, ART depends on the available distance for the reaction calculated along the trajectory of merging vehicles from 15 m before the yielding line to the identified merging CP. ARD is 22.8 m; ART is 2.74 s for motor vehicles and 8.22 s for bikes;
- -
- for diversion CPi, ART depends on the available distance for reaction calculated along the trajectory of vehicles in the circulatory roadway from the past splitter island before the exit arm to the identified diversion CP. Indeed, according to [45], drivers should use a right turn signal when passing the exit before the one to be taken. ARD is 16.9 m; ART is 2.02 s for motor vehicles and 6.08 s for bikes.
- -
- Table 11 lists the results of the damage analysis.
- RAD in L2 is 15.80 m (23 m in L0): the new roundabout is compact instead of conventional. It implies modification of ANN: it is 7 m (6 m in L0);
- radii of trajectories vary (rotatory radius of motor vehicles decreases in L2 compared to L1 and L0, rotatory radius of bikes increases from L2 −22.25 m- to L1 −26.50 m- compared to L0 −18.50 m);
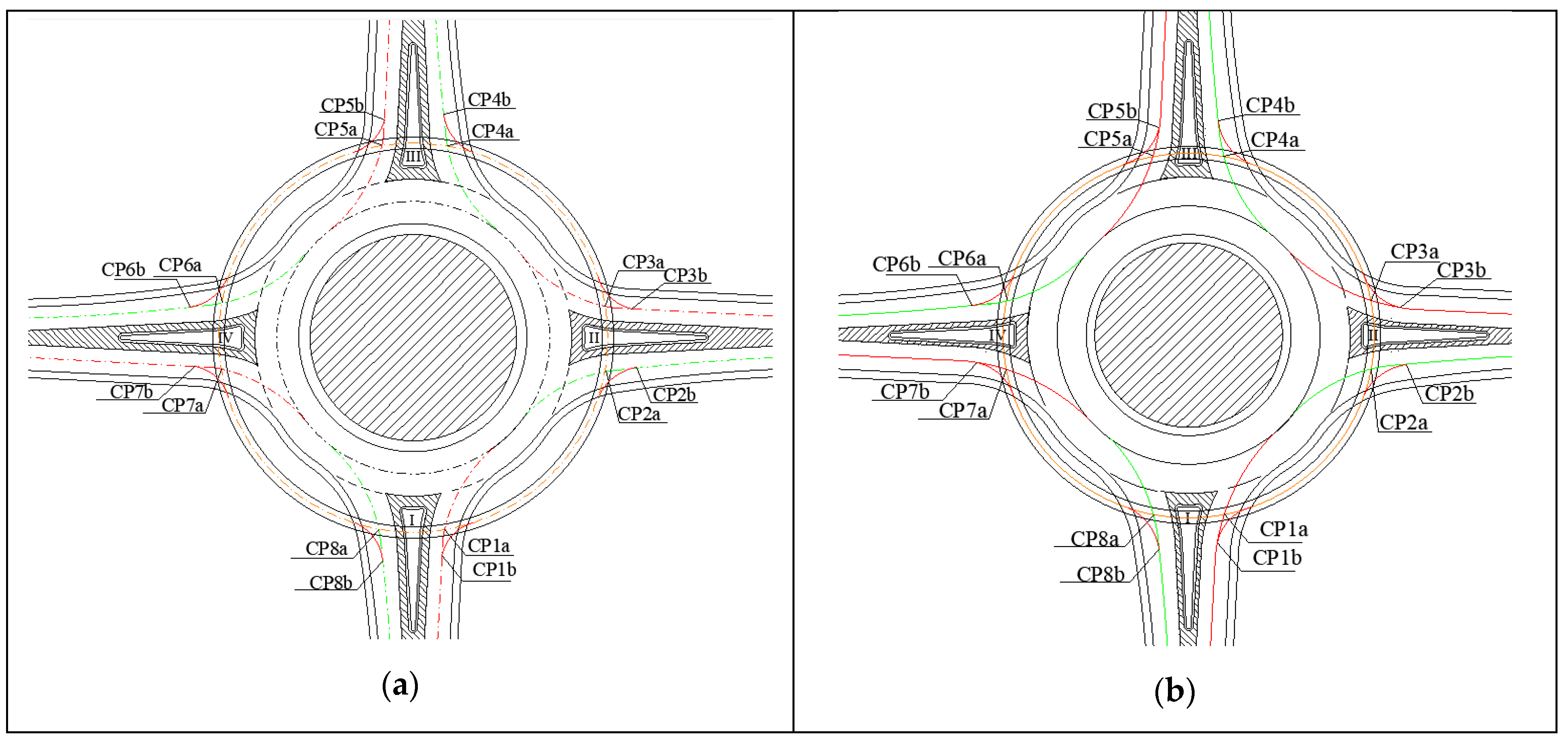
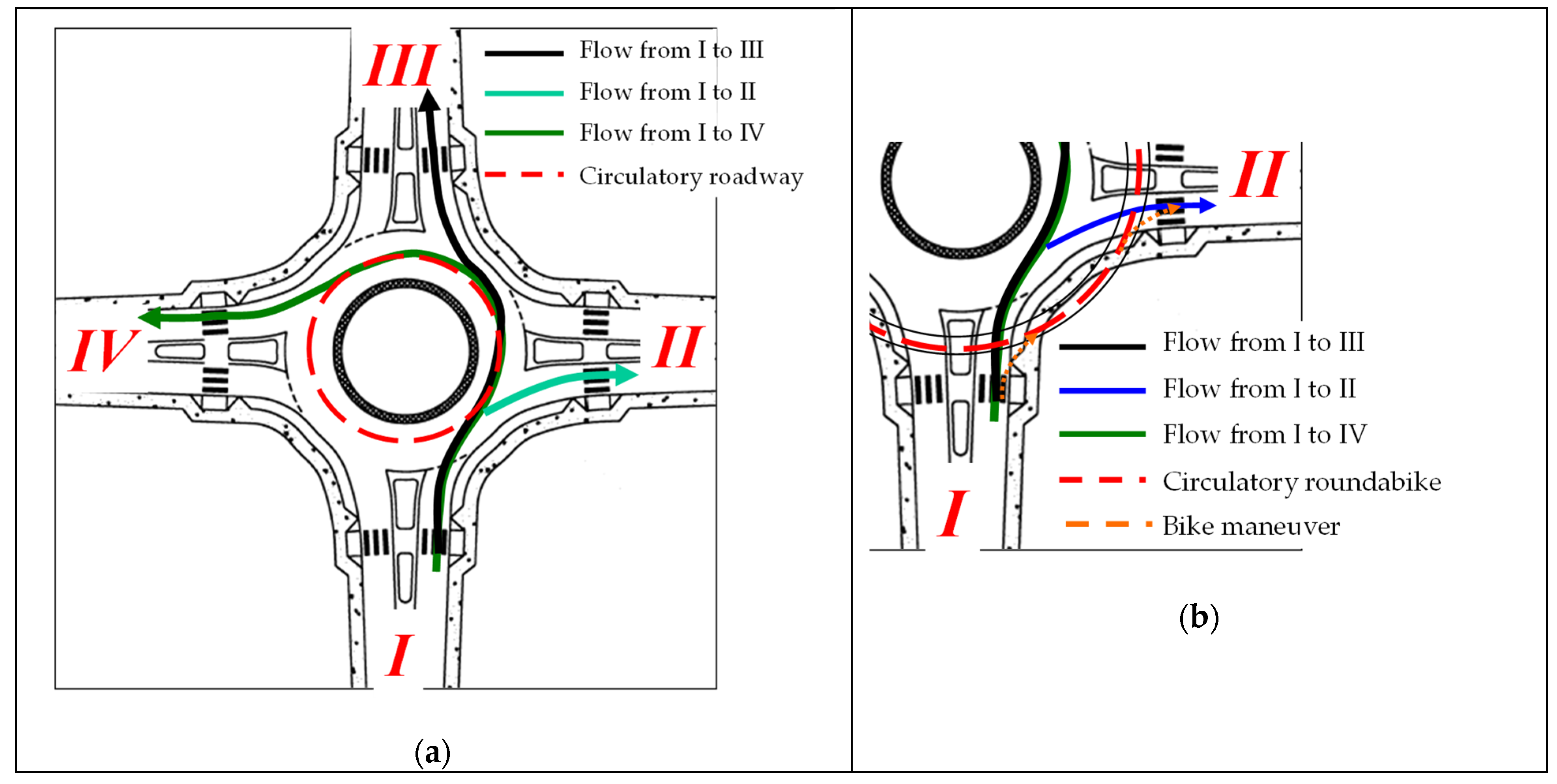
- flows in CPi vary: in L0 they refer to a circulating flow (both motor vehicles and bikes) that is represented by the red-dotted circle in Figure 6a and a maneuvering flow (in Figure 6a only the maneuver trajectories from I are represented), while in L1 and L2 they respectively refer to both the bike circulating flow and a motor vehicle maneuvering flow (e.g., intersection between the red dotted circle and the blue-red-black motor vehicle trajectories in Figure 6b), and a bike maneuvering flow and the motor vehicle trajectories (e.g., conflicts between the orange maneuvers of bikes and the black and blue trajectories of motor vehicles along I and II, respectively, in Figure 6b).
- Both in L1 and L2 the roundabout features priority crossings for cycles flow.
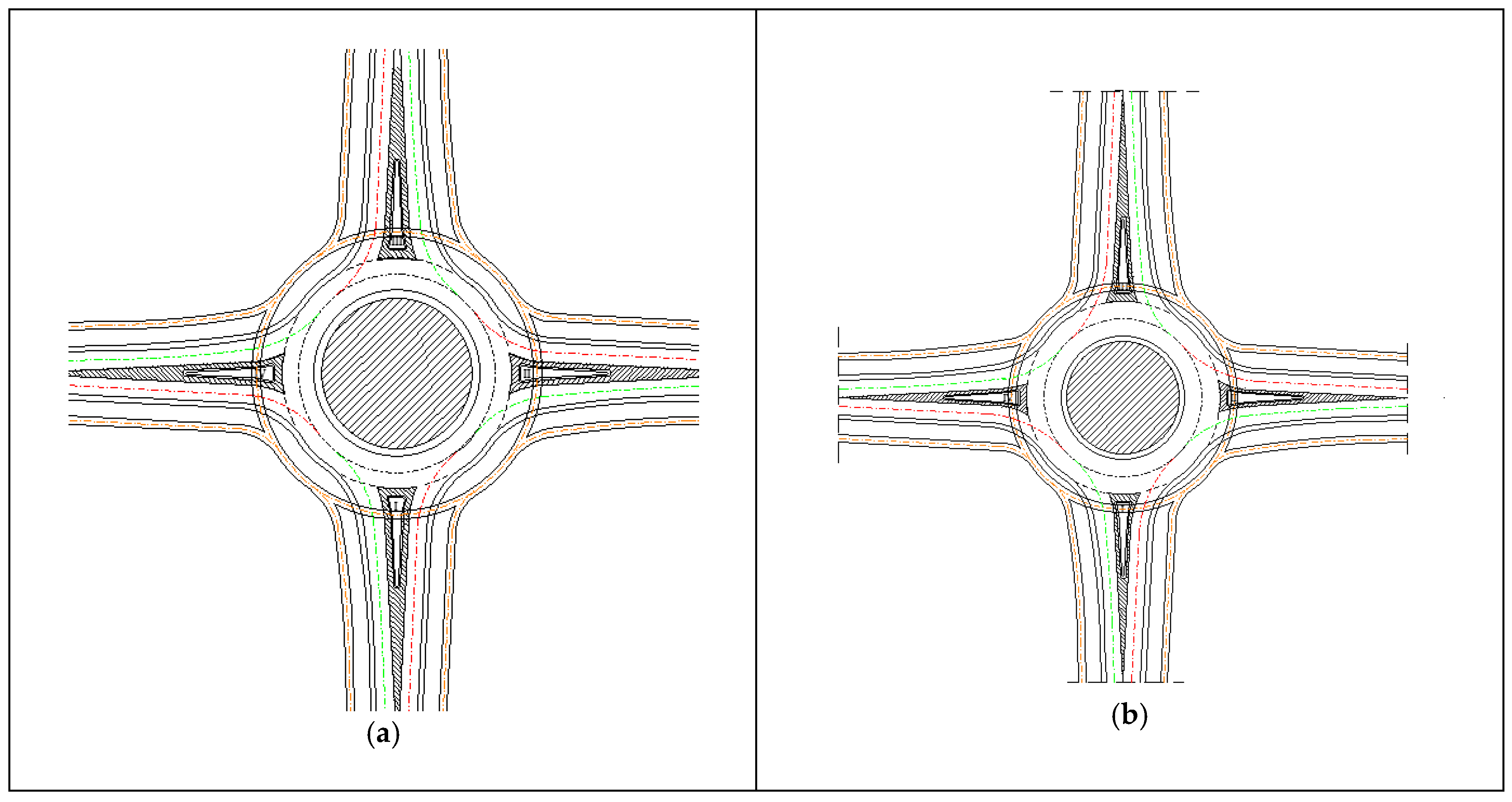
- In L1 and L2 there are 16 CPi (Figure 5a,b, respectively);
- CPi are in the arms instead of in the rotatory carriageway;
- eight CPi are crossing ones (i.e., CPia: drivers reduce their speed and give way to cyclists), four are diversion ones (i.e., CP1b, CP3b, CP5b, and CP7b), and four are merging ones (i.e., CP2b, CP4b, CP6b, and CP8b: drivers should give way on the exit of the roundabout).
- L0, L5, and L10 are the less-safe layouts: their values (2.87 × 10−2, 3.15 × 10−2, and 3.71 × 10−2, respectively) are higher than those of other layouts for given bike flow volumes;
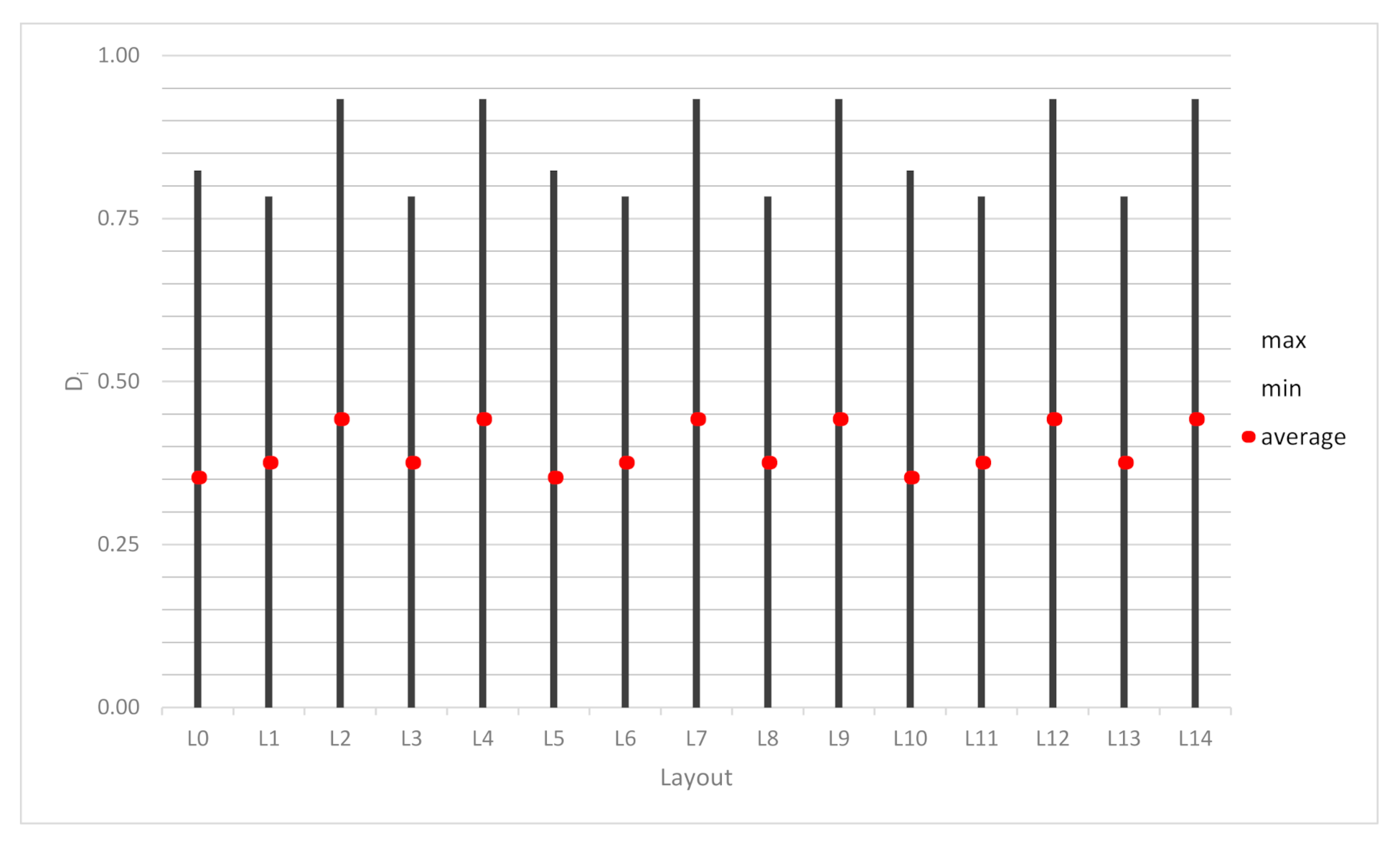
- the geometric configuration of the examined layout significantly affects the range of Ri and its average value between the minimum and maximum values. With regard to a traffic volume, Equation (16) gives the percentage variability of the Ri values (VARRi):where i ranges between 0 and 4.
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nordback, K. Measuring Traffic Reduction form Bicycle Commuting. Transp. Res. Rec. J. Transp. Res. Board 2014, 2468, 98–99. [Google Scholar] [CrossRef]
- Castells-Graells, D.; Salahub, C.; Pournaras, E. On cycling risk and discomfort: Urban safety mapping and bike route recommendations. Computing 2020, 102, 1259–1274. [Google Scholar] [CrossRef] [Green Version]
- Arroyo, R.; Mars, L.; Ruiz, T. Perceptions of pedestrian and cyclist environments, travel behaviors, and social networks. Sustainability 2018, 10, 3241. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Schwebel, D.C.; Zhang, L.; Xiao, W.; Hu, G. Unsafe bicycling behavior in Changsha, China: A video-based observational study. Int. J. Environ. Res. Public Health 2020, 17, 3256. [Google Scholar] [CrossRef]
- Ferraro, O.; Orsi, C.; Popa, I.; Montomoli, C.; Morandi, A. Avoiding bicycle collisions: Experience on safety bike behavior among Italian bicycle users, individual and conspicuity characteristics. J. Transp. Saf. Secur. 2020, 12, 653–670. [Google Scholar] [CrossRef]
- Bahrololoom, S.; Young, W.; Logan, D. Modelling injury severity of bicyclists in bicycle-car crashes at intersections. Accid. Anal. Prev. 2020, 144, 105597. [Google Scholar] [CrossRef] [PubMed]
- Bella, F.; Silvestri, M. Interaction driver–bicyclist on rural roads: Effects of cross-sections and road geometric elements. Accid. Anal. Prev. 2017, 102, 191–201. [Google Scholar] [CrossRef] [PubMed]
- Hull, A.; O’Holleran, C. Bicycle infrastructure: Can good design encourage cycling? Urban Plan. Transp. Res. 2014, 2, 369–406. [Google Scholar] [CrossRef] [Green Version]
- Cantisani, G.; De Andrade Barbosa, Y.; Moretti, L. Safety problems in urban cycling mobility: A quantitative risk analysis at urban intersections. Safety 2019, 5, 6. [Google Scholar] [CrossRef] [Green Version]
- Cantisani, G.; De Andrade Barbosa, Y.; Moretti, L. Risk Analysis and Safer Layout Design Solutions for Bicycles in Four-Leg Urban Intersections. Safety 2019, 5, 24. [Google Scholar] [CrossRef] [Green Version]
- Demasi, F.; Loprencipe, G.; Moretti, L. Road safety analysis of urban roads: Case study of an Italian municipality. Safety 2018, 4, 58. [Google Scholar] [CrossRef] [Green Version]
- Cantisani, G.; Loprencipe, G.; Primieri, F. The integrated design of urban road intersections: A case study. In ICSDC 2011: Integrating Sustainability Practices in the Construction Industry, Proceedings of the International Conference on Sustainable Design and Construction, Kansas City, MO, USA, 23–25 March 2011; American Society of Civil Engineers: Reston, VA, USA, 2012; pp. 722–728. [Google Scholar]
- Isaksson-Hellman, I.; Werneke, J. Detailed description of bicycle and passenger car collisions based on insurance claims. Saf. Sci. 2017, 92, 330–337. [Google Scholar] [CrossRef]
- Moretti, L.; Palazzi, F.; Cantisani, G. Operating times and users’ behavior at Urban road intersections. Sustainability 2020, 12, 4120. [Google Scholar] [CrossRef]
- Di Mascio, P.; Fusco, G.; Grappasonni, G.; Moretti, L.; Ragnoli, A. Geometrical and functional criteria as a methodological approach to implement a new cycle path in an existing urban road network: A case study in Rome. Sustainability 2018, 10, 2951. [Google Scholar] [CrossRef] [Green Version]
- Madsen, T.K.O.; Lahrmann, H. Comparison of five bicycle facility designs in signalized intersections using traffic conflict studies. Transp. Res. Part F 2016, 46, 438–450. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Sun, J.; Tian, Y.; Ni, Y.; Yu, S. Modeling and Simulation of Nonmotorized Vehicles’ Dispersion at Mixed Flow Intersections. J. Adv. Transp. 2019, 2019, 9127062. [Google Scholar] [CrossRef]
- Cantisani, G.; Del Serrone, G.; Di Biagio, G. Results of Micro-Simulation Model for Exploring Drivers’ Behavior on Acceleration Lanes. Eur. Transp. 2020, 77, 1–10. [Google Scholar]
- Cantisani, G.; Del Serrone, G.; Di Biagio, G. Calibration and validation of and results from a micro-simulation model to explore drivers’ actual use of acceleration lanes. Simul. Model. Pract. Theory 2018, 89, 82–99. [Google Scholar] [CrossRef]
- Luo, Y.; Jia, B.; Liu, J.; Lam, W.H.K.; Li, X.; Gao, Z. Modeling the interactions between car and bicycle in heterogeneous traffic. J. Adv. Transp. 2013, 49, 29–47. [Google Scholar] [CrossRef]
- Silvano, A.P.; Koutsopoulos, H.N.; Ma, X. Analysis of vehicle-bicycle interactions at unsignalized crossings: A probabilistic approach and application. Accid. Anal. Prev. 2016, 97, 38–48. [Google Scholar] [CrossRef] [PubMed]
- Strauss, J.; Miranda-Moreno, L.F.; Morency, P. Cyclist activity and injury risk analysis at signalized intersections: A Bayesian modelling approach. Accid. Anal. Prev. 2013, 59, 9–17. [Google Scholar] [CrossRef] [PubMed]
- Asgarzadeh, M.; Verma, S.; Mekary, R.A.; Courtney, T.K.; Christiani, D.C. The role of intersection and street design on severity of bicycle-motor vehicle crashes. Inj. Prev. 2017, 23, 179–185. [Google Scholar] [CrossRef] [Green Version]
- Cantisani, G.; Del Serrone, G. Procedure for the Identification of Existing Roads Alignment from Georeferenced Points Database. Infrastructures 2021, 6, 2. [Google Scholar] [CrossRef]
- Jensen, S.U. Safety Effects of Converting Intersections to Roundabouts. Transp. Res. Rec. J. Transp. Res. Board 2013, 2389, 22–29. [Google Scholar] [CrossRef] [Green Version]
- Di Mascio, P.; Loprencipe, G.; Moretti, L.; Corazza, M.V.; Vivaldi, S.; Vincenti, G. Design of the First Italian Roundabout with Jointed Plain Concrete Pavement. Appl. Sci. 2018, 8, 283. [Google Scholar] [CrossRef] [Green Version]
- Jensen, S.U. Safe roundabouts for cyclists. Accid. Anal. Prev. 2017, 105, 30–37. [Google Scholar] [CrossRef] [PubMed]
- Gross, F.; Lyon, C.; Persaud, B.; Srinivasan, R. Safety effectiveness of converting signalized intersections to roundabouts. Accid. Anal. Prev. 2012, 50, 234–241. [Google Scholar] [CrossRef] [PubMed]
- Berthaume, A.; Knodler, M.A. Hazardous Bicycle Maneuvers at Single-Lane Roundabouts in Massachusetts: A Conflict and Events Study. In Proceedings of the 92nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2013; Available online: https://trid.trb.org/view/1242451 (accessed on 25 January 2021).
- Petru, J.; Krivda, V. An Analysis of Turbo Roundabouts from the Perspective of Sustainability of Road Transportation. Sustainability 2021, 13, 2119. [Google Scholar] [CrossRef]
- Rasanen, M.; Summala, H. Car Drivers’ Adjustments to Cyclists at Roundabouts. Transp. Hum. Factors 2000, 2, 1–17. [Google Scholar] [CrossRef]
- Macioszek, E.; Kurek, A. Roundabout users subjective safety—Case study from Upper Silesian and Masovian Voivodeships (Poland). Trans. Transp. Sci. 2020, 11, 39–50. [Google Scholar] [CrossRef]
- Macioszek, E. Roundabout Entry Capacity Calculation—A Case Study Based on Roundabouts in Tokyo, Japan, and Tokyo Surroundings. Sustainability 2020, 12, 1533. [Google Scholar] [CrossRef] [Green Version]
- Tollazzi, T.; Guerrieri, M.; Jovanović, G.; Renčelj, M. Functions, Capacities, and Traffic Safety Characteristics of Some Types of Two-Level Roundabouts. Sustainability 2020, 12, 6914. [Google Scholar] [CrossRef]
- Sakshaug, L.; Laureshyn, A.; Svensson, Å.; Hydén, C. Cyclists in roundabouts—Different design solutions. Accid. Anal. Prev. 2010, 42, 1338–1351. [Google Scholar] [CrossRef] [PubMed]
- Transport for London. London Cycling Design Standards; Transport for London: London, UK, 2014. [Google Scholar]
- Ministero delle Infrastrutture e dei Trasporti. Norme Funzionali e Geometriche per la Costruzione delle Intersezioni Stradali [Functional and Geometrical Standards for Road Constructions]; Ministero delle Infrastrutture e dei Trasporti: Rome, Italy, 2006. [Google Scholar]
- Ministero dei Lavori Pubblici. Regolamento Recante Norme per la Definizione Delle Caratteristiche Tecniche Delle Piste Ciclabili [Standard for Technical Characteristics of Cyle Paths]; Ministero dei Lavori Pubblici: Rome, Italy, 1999. [Google Scholar]
- Bates, L.J.; Davey, J.; Watson, B.; King, M.J.; Armstrong, K. Factors Contributing to Crashes among Young Drivers. Sultan Qabos Univ. Med. J. 2014, 14, 297–305. [Google Scholar]
- Rohatgi, V.K.; Saleh, A.M.E. An Introduction to Probability and Statistics; Wiley Series in Probability and Statistics; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Mauro, R. Calculation of Roundabouts: Capacity, Waiting Phenomena and Reliability; Springer Science & Business Media: Cham, Switzerland, 2010. [Google Scholar]
- Elvik, R.; Erke, A.; Christensen, P. Elementary Units of Exposure. J. Transp. Res. Board 2009, 2103, 25–31. [Google Scholar] [CrossRef] [Green Version]
- Ministero delle Infrastrutture e dei Trasporti. Norme Funzionali e Geometriche per la Costruzione delle Strade [Functional and Geometrical Standards for Road Construction]; Ministero delle Infrastrutture e dei Trasporti: Rome, Italy, 2001. [Google Scholar]
- Transportation Research Board. Highway Capacity Manual 6th Edition: A Guide for Multimodal Mobility Analysis; The National Academies Press: Washington, DC, USA, 2016. [Google Scholar]
- Ministero delle Infrastrutture e dei Trasporti. Procedure Amministrative per il Conseguimento della Patente di Guida della Categoria B [Procedures to Obtaine Driving Licence]; Ministero delle Infrastrutture e dei Trasporti: Rome, Italy, 2017. [Google Scholar]
- Corpus, C. TX Unified Development Code. Available online: http://online.encodeplus.com/regs/corpuschristi-tx/doc-viewer.aspx?secid=584#secid-584 (accessed on 21 January 2021).
- Abdullah, M.; Dias, C.; Muley, D.; Shahin, M. Exploring the impacts of COVID-19 on travel behavior and mode preferences. Transp. Res. Interdiscip. Perspect. 2020, 8, 100255. [Google Scholar] [CrossRef]
- United Nations Economic Commission for Europe. Sustainable Urban Mobility and Public Transport in UNECE capitals. 2015. Available online: https://unece.org/fileadmin/DAM/trans/main/wp5/publications/Sustainable_Urban_Mobility_and_Public_Transport_FINAL.pdf (accessed on 21 January 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
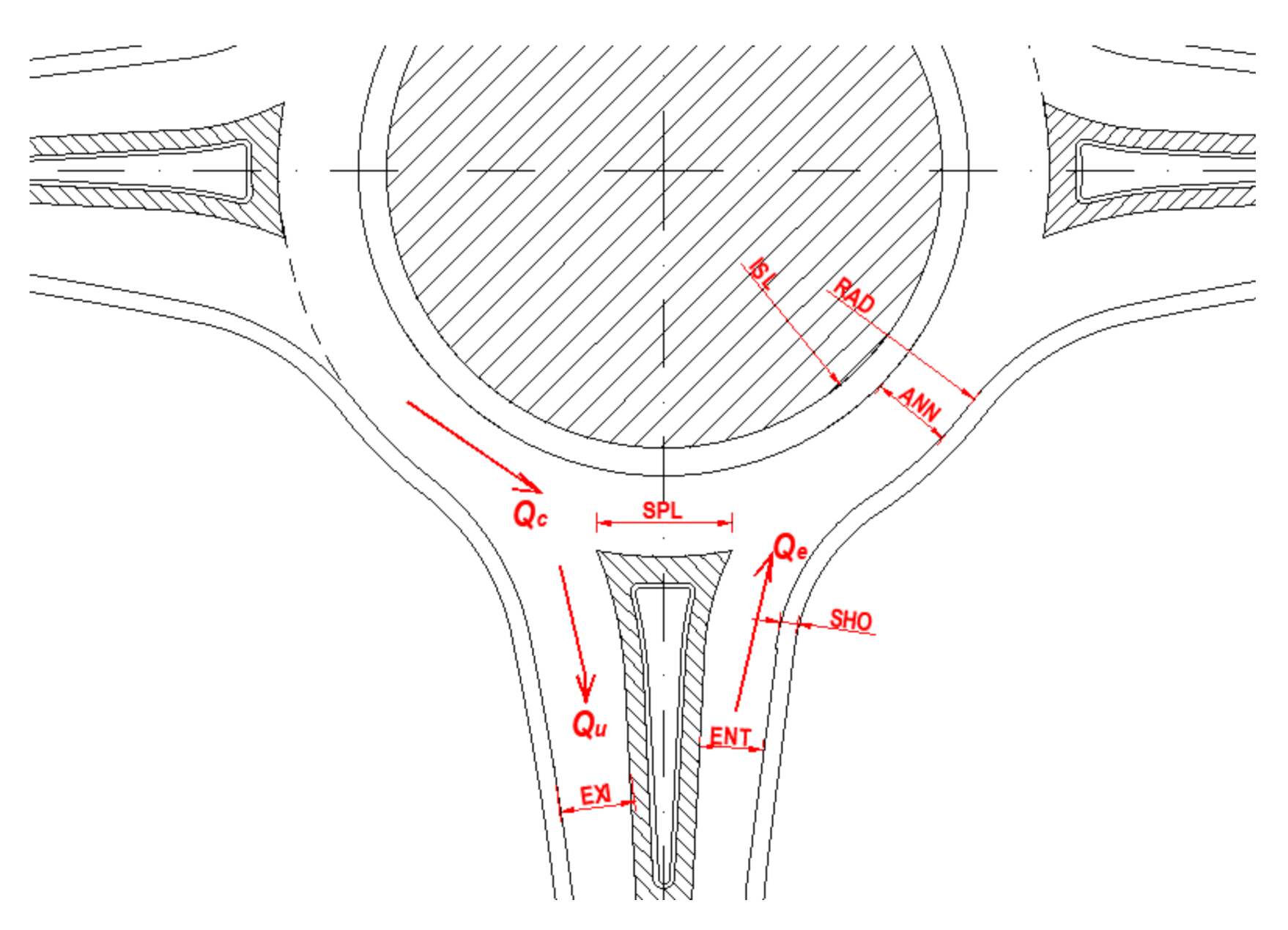
| Variable | Symbol | Value | Unit |
|---|---|---|---|
| Inscribed circle radius | RAD | 23 | m |
| Central island radius | ISL | 12.5 | m |
| Circulatory roadway width | ANN | 6 | m |
| Entry width | ENT | 3.5 | m |
| Exit width | EXI | 4.5 | m |
| Splitter island width | SPL | 15 | m |
| Shoulder width | SHO | 1 | m |
| ART (s) | Level of Damage | D | Chromatic Categorization |
|---|---|---|---|
| 0 < ART ≤ 1.5 | Very dangerous interaction | 1 < D ≤ 1.5 | ● |
| 1.5 < ART ≤ 3 | Dangerous interaction | 0.5 < D ≤ 1 | ● |
| 3 < ART ≤ 4.5 | Slight interaction | 0 < D ≤ 0.5 | ● |
| ART > 4.5 | No interaction | - | ● |
| Entry Arm | Entry Flows | |||
|---|---|---|---|---|
| QV,e (Veh./h) | QB,e (Veh./h) | |||
| I | QI;V,e | 700 | QI;B,e | 40 |
| II | QII;V,e | 525 | QII;B,e | 70 |
| III | QIII;V,e | 310 | QIII;B,e | 60 |
| IV | QIV;V,e | 430 | QIV;B,e | 120 |
| Entry Arm | Exit Arm | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| 1 | 0.00 | 0.18 | 0.65 | 0.17 |
| 2 | 0.20 | 0.00 | 0.21 | 0.59 |
| 3 | 0.72 | 0.10 | 0.00 | 0.18 |
| 4 | 0.20 | 0.70 | 0.10 | 0.00 |
| Entry Arm | Exit Arm | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
| 1 | 0.00 | 0.20 | 0.45 | 0.35 |
| 2 | 0.56 | 0.00 | 0.34 | 0.10 |
| 3 | 0.46 | 0.29 | 0.00 | 0.25 |
| 4 | 0.32 | 0.46 | 0.22 | 0.00 |
| Exit Arm | |||
|---|---|---|---|
| I | II | III | IV |
| QI;V,o | QII;V,o | QIII;V,o | QIV;V,o |
| 414 | 458 | 608 | 485 |
| Exit Arm | |||
|---|---|---|---|
| I | II | III | IV |
| QI;B,o | QII;B,o | QIII;B,o | QIV;B,o |
| 105 | 81 | 68 | 36 |
| Arm | |||
|---|---|---|---|
| I | II | III | IV |
| QI;V,c | QII;V,c | QIII;V,c | QIV;V,c |
| 375 | 617 | 534 | 359 |
| Arm | |||
|---|---|---|---|
| I | II | III | IV |
| QI;B,c | QII;B,c | QIII;B,c | QIV;B,c |
| 99 | 58 | 60 | 84 |
| CPi | pi |
|---|---|
| CP1 = CP1,I;m | p1 = 5.89 × 10−3 |
| CP3 = CP3,II;m | p3 = 5.22 × 10−3 |
| CP5 = CP5,III;m | p5 = 3.65 × 10−3 |
| CP7 = CP7,IV;m | p7 = 5.72 × 10−3 |
| CP2 = CP2,I;d | p2 = 5.41 × 10−3 |
| CP4 = CP4,II;m | p6 = 5.16 × 10−3 |
| CP6 = CP6,III;m | P6 = 3.86 × 10−3 |
| CP8 = CP8,IV;m | p8 = 5.80 × 10−3 |
| Examined Maneuvering Flow | QV,e | QB,e | QV,o | QB,o |
|---|---|---|---|---|
| CPi | Di | |||
| CP1, CP3, CP5, CP7 | 0.586 | 0 | - | - |
| CP2, CP4, CP6, CP8 | - | - | 0.824 | 0 |
| CPi | Ri |
|---|---|
| CP1 | 3.45 × 10−3 |
| CP3 | 4.46 × 10−3 |
| CP5 | 3.06 × 10−3 |
| CP7 | 4.26 × 10−3 |
| CP2 | 2.14 × 10−3 |
| CP4 | 3.18 × 10−3 |
| CP6 | 3.35 × 10−3 |
| CP8 | 4.78 × 10−3 |
| CPi | pi(-) | ART(s) | Di(-) | Ri | |||
|---|---|---|---|---|---|---|---|
| L1 and L2 | L1 | L2 | L1 | L2 | L1 | L2 | |
| CP1a | 4.79 × 10−3 | 4.236 | 4.368 | 0.088 | 0.044 | 2.11 × 10−4 | 2.11 × 10−4 |
| CP1b | 1.95 × 10−3 | 5.400 | 5.400 | 0 | 0 | - | - |
| CP2a | 1.92 × 10−3 | 2.148 | 1.738 | 0.784 | 0.921 | 1.51 × 10−3 | 1.79× 10−3 |
| CP2b | 2.64 × 10−3 | 2.611 | 2.189 | 0.630 | 0.770 | 1.67 × 10−3 | 2.09 × 10−3 |
| CP3a | 2.18 × 10−3 | 4.236 | 4.368 | 0.088 | 0.044 | 1.92 × 10−4 | 9.61 × 10−5 |
| CP3b | 2.61 × 10−3 | 5.400 | 5.400 | 0 | 0 | - | - |
| CP4a | 2.58 × 10−3 | 2.148 | 1.738 | 0.784 | 0.921 | 2.02 × 10−3 | 2.41 × 10−3 |
| CP4b | 2.92 × 10−3 | 2.611 | 2.189 | 0.630 | 0.770 | 1.84 × 10−3 | 2.31 × 10−3 |
| CP5a | 1.37 × 10−3 | 4.236 | 4.368 | 0.088 | 0.044 | 1.20 × 10−4 | 6.02 × 10−5 |
| CP5b | 1.36 × 10−3 | 5.400 | 5.400 | 0 | 0 | - | - |
| CP6a | 2.91 × 10−3 | 2.148 | 1.738 | 0.784 | 0.921 | 2.28 × 10−3 | 2.72 × 10−3 |
| CP6b | 1.25 × 10−3 | 2.611 | 2.189 | 0.630 | 0.770 | 7.89 × 10−4 | 9.90 × 10−4 |
| CP7a | 2.60 × 10−3 | 4.236 | 4.368 | 0.088 | 0.044 | 2.29 × 10−4 | 1.15 × 10−4 |
| CP7b | 3.69 × 10−3 | 5.400 | 5.400 | 0 | 0 | - | - |
| CP8a | 2.95 × 10−3 | 2.148 | 1.738 | 0.784 | 0.921 | 2.31 × 10−3 | 2.75 × 10−3 |
| CP8b | 3.13 × 10−3 | 2.611 | 2.189 | 0.630 | 0.770 | 1.97 × 10−3 | 2.47 × 10−4 |
| 1.52 × 10−2 | 1.80 × 10−2 | ||||||
| Layout | Geometrical Configuration | Flows on Entry Arm (veh/h) | Flows on Exit Arm (veh/h) | ||
|---|---|---|---|---|---|
| Motor Vehicles | Bicycles | Motor Vehicles | Bicycles | ||
| L5 | L0 | cf. QV,e in Table 3 | QI;B,e = 44 QII;B,e = 77 QIII;B,e = 66 QIV;B,e = 132 | cf. Table 6 | QI;B,o = 115 QII;B,o = 89 QIII;B,o = 75 QIV;B,o = 40 |
| L6 | L1 | ||||
| L7 | L2 | ||||
| L8 | L3 | ||||
| L9 | L4 | ||||
| L10 | L0 | cf. QV,e in Table 3 | QI;B,e = 52 QII;B,e = 91 QIII;B,e = 78 QIV;B,e = 156 | cf. Table 6 | QI;B,o = 137 QII;B,o = 105 QIII;B,o = 88 QIV;B,o = 47 |
| L11 | L1 | ||||
| L12 | L2 | ||||
| L13 | L3 | ||||
| L14 | L4 | ||||
| Layout | maxDi | minDi | maxRi | minRi | ||
|---|---|---|---|---|---|---|
| L0 | 0.35 | 0.82 | 0.00 | 2.87 × 10−2 | 4.78 × 10−3 | 2.14 × 10−3 |
| L1 | 0.38 | 0.78 | 0.00 | 1.53 × 10−2 | 2.31 × 10−3 | 1.20 × 10−4 |
| L2 | 0.44 | 0.93 | 0.00 | 1.80 × 10−2 | 2.75 × 10−3 | 6.02 × 10−5 |
| L3 | 0.38 | 0.78 | 0.00 | 9.09 × 10−3 | 2.31 × 10−3 | 1.20 × 10−4 |
| L4 | 0.44 | 0.93 | 0.00 | 1.01 × 10−2 | 2.75 × 10−3 | 6.02 × 10−5 |
| L5 | 0.35 | 0.82 | 0.00 | 3.15 × 10−2 | 5.25 × 10−3 | 2.35 × 10−3 |
| L6 | 0.38 | 0.78 | 0.00 | 1.69 × 10−2 | 2.54 × 10−3 | 1.32 × 10−4 |
| L7 | 0.44 | 0.93 | 0.00 | 1.98 × 10−2 | 3.02 × 10−3 | 6.62 × 10−5 |
| L8 | 0.38 | 0.78 | 0.00 | 9.98 × 10−3 | 2.54 × 10−3 | 1.32 × 10−4 |
| L9 | 0.44 | 0.93 | 0.00 | 1.12 × 10−2 | 3.02 × 10−3 | 6.62 × 10−5 |
| L10 | 0.35 | 0.82 | 0.00 | 3.71 × 10−2 | 6.18 × 10−3 | 2.77 × 10−3 |
| L11 | 0.38 | 0.78 | 0.00 | 1.99 × 10−2 | 2.99 × 10−3 | 1.56 × 10−4 |
| L12 | 0.44 | 0.93 | 0.00 | 2.33 × 10−2 | 3.56 × 10−3 | 7.81 × 10−5 |
| L13 | 0.38 | 0.78 | 0.00 | 1.18 × 10−2 | 2.99 × 10−3 | 1.56 × 10−4 |
| L14 | 0.44 | 0.93 | 0.00 | 1.32 × 10−2 | 3.56 × 10−3 | 7.81 × 10−5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cantisani, G.; Durastanti, C.; Moretti, L. Cyclists at Roundabouts: Risk Analysis and Rational Criteria for Choosing Safer Layouts. Infrastructures 2021, 6, 34. https://doi.org/10.3390/infrastructures6030034
Cantisani G, Durastanti C, Moretti L. Cyclists at Roundabouts: Risk Analysis and Rational Criteria for Choosing Safer Layouts. Infrastructures. 2021; 6(3):34. https://doi.org/10.3390/infrastructures6030034
Chicago/Turabian StyleCantisani, Giuseppe, Claudio Durastanti, and Laura Moretti. 2021. "Cyclists at Roundabouts: Risk Analysis and Rational Criteria for Choosing Safer Layouts" Infrastructures 6, no. 3: 34. https://doi.org/10.3390/infrastructures6030034
APA StyleCantisani, G., Durastanti, C., & Moretti, L. (2021). Cyclists at Roundabouts: Risk Analysis and Rational Criteria for Choosing Safer Layouts. Infrastructures, 6(3), 34. https://doi.org/10.3390/infrastructures6030034