
Performance Evaluation of Uncooled UAV Infrared Camera in Detecting Concrete Delamination





Abstract
:1. Introduction
1.1. Concrete Deck Delamination Detection Using Infrared Thermography (IRT)
1.2. IRT Delamination Detection and Segmentation
1.3. Scope of Work
2. Background
2.1. Cooled vs. Uncooled Infrared Camera
2.2. Studies Utilizing a Cooled Sensor Thermal Camera
2.3. Studies Utilizing Uncooled Sensor Thermal Camera
2.4. Studies Utilizing Both Uncooled and Cooled Sensor Thermal Cameras
2.5. Purpose of the Research
3. The Proposed Approach
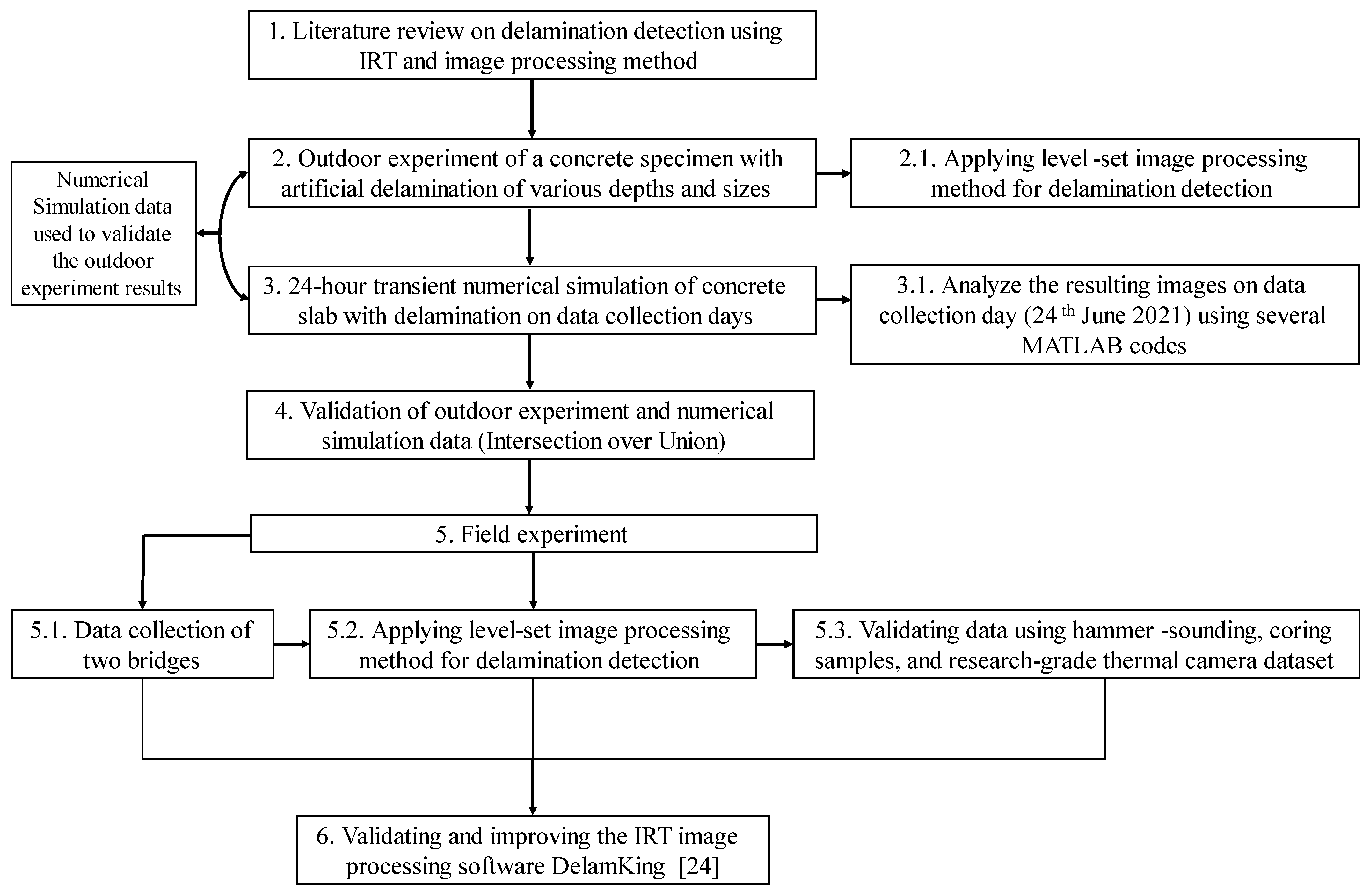
3.1. Research Framework
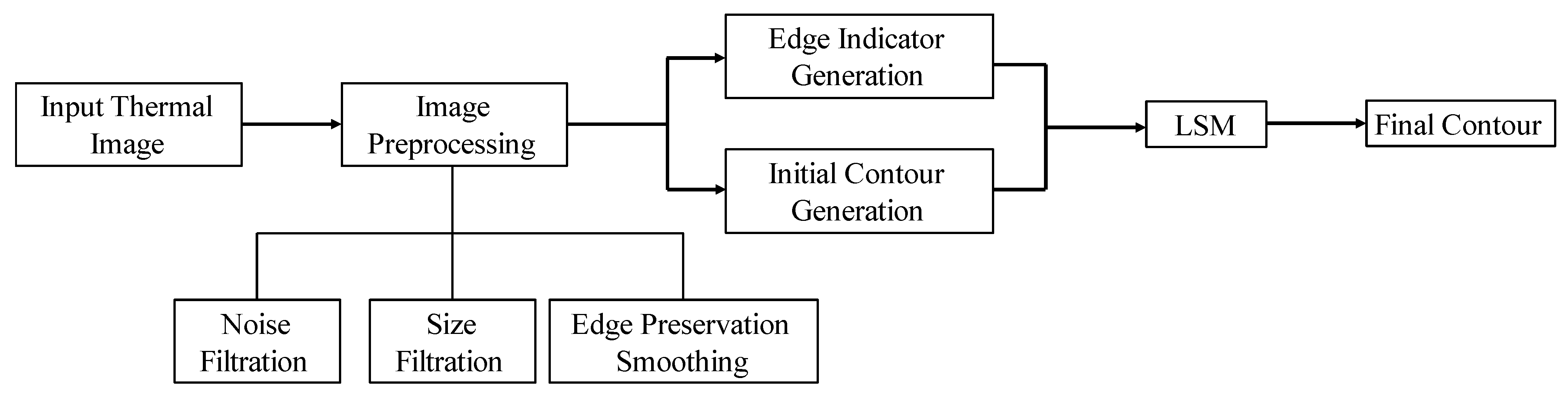
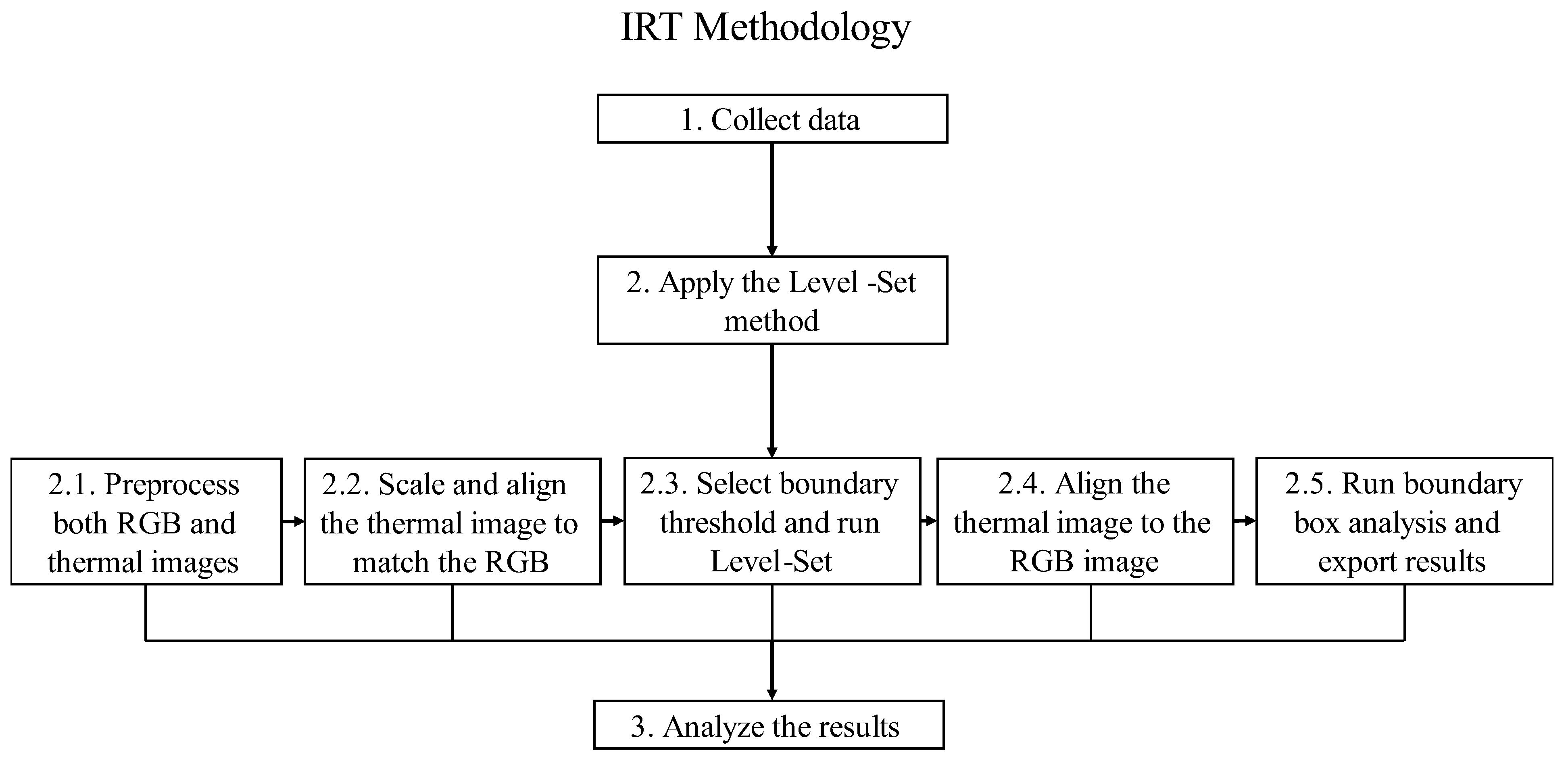
3.2. Level-Set Method (LSM)
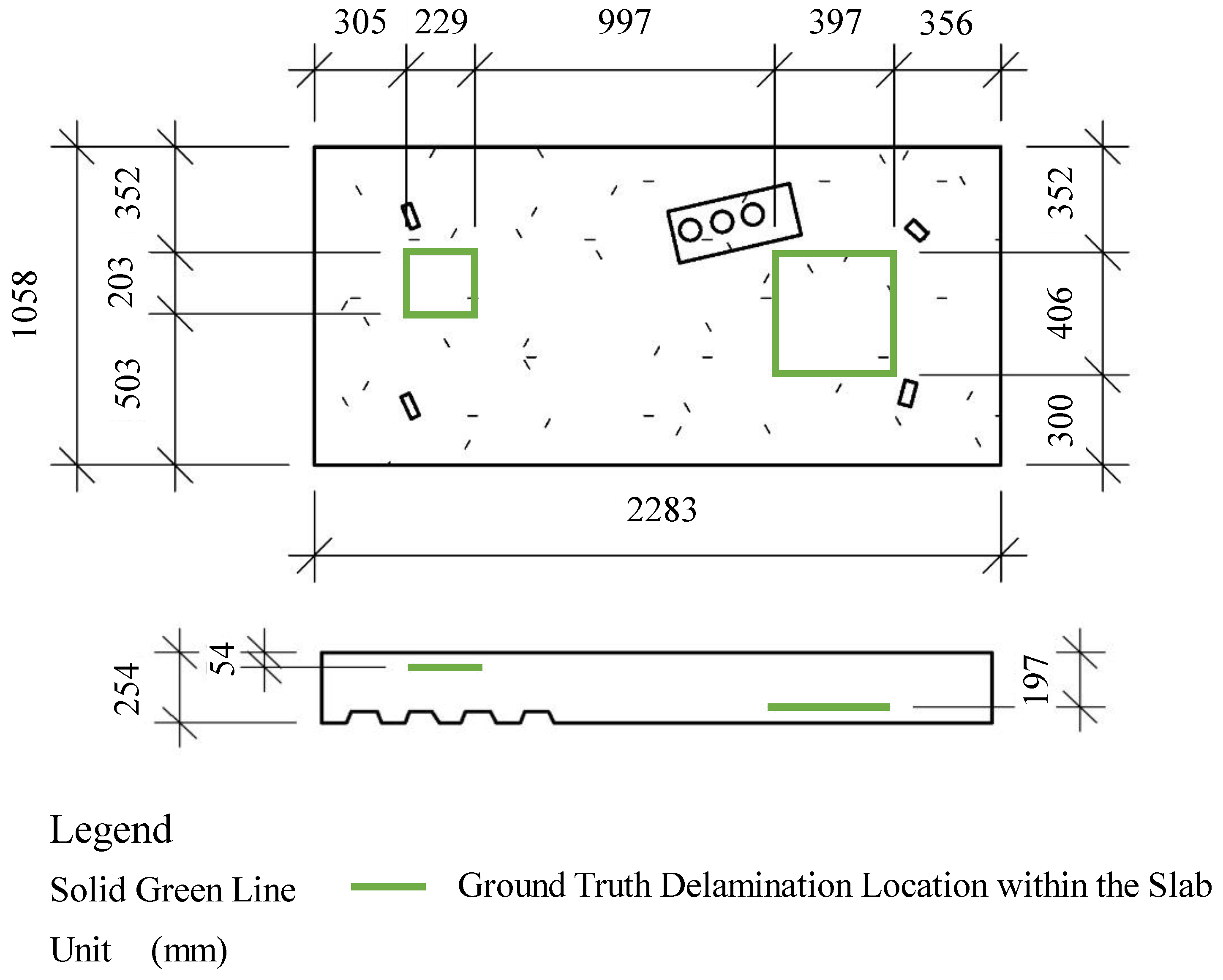
3.3. Experimental Validations of the Mimicked Slab (Outdoor Experiment)
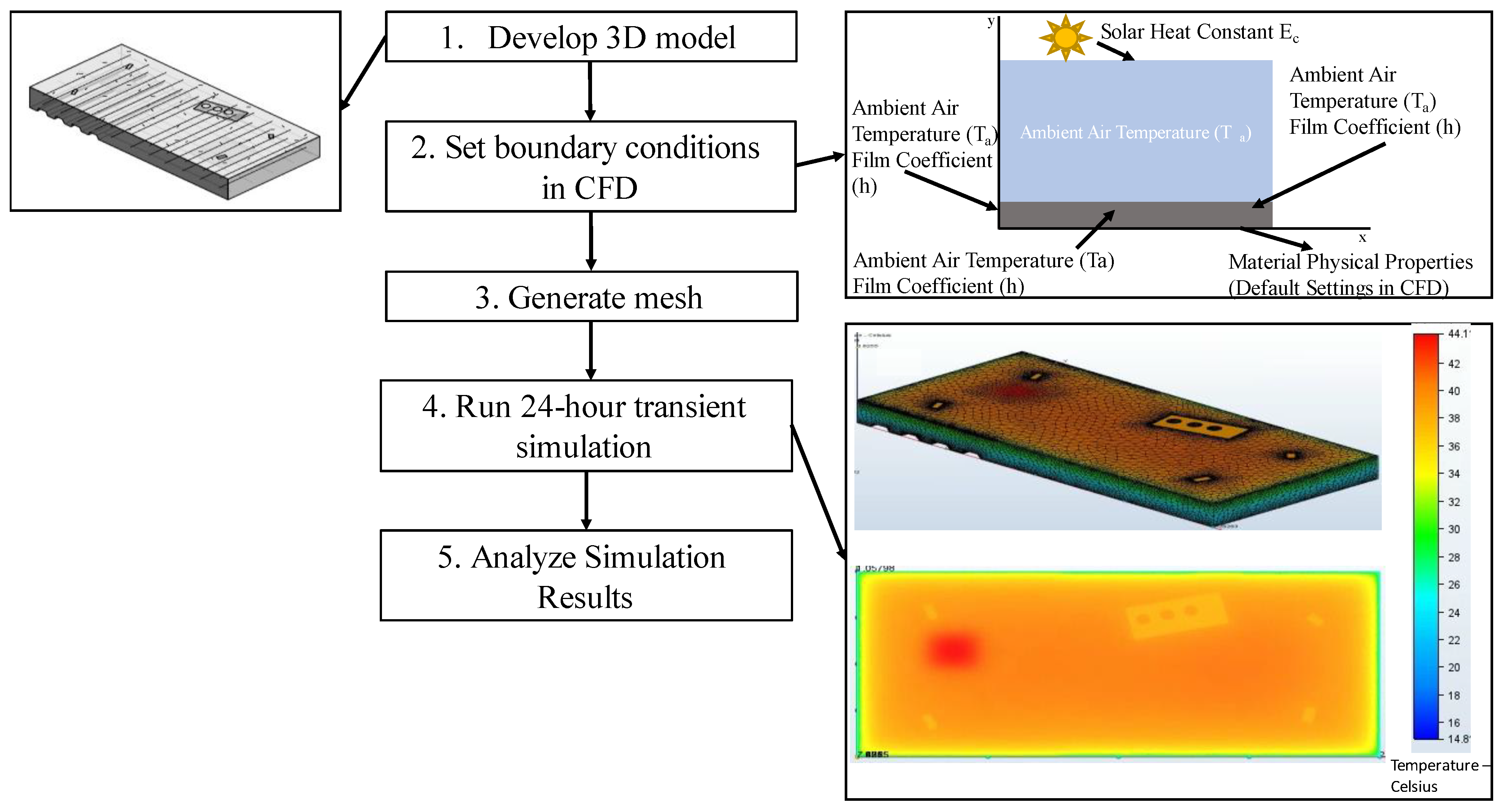
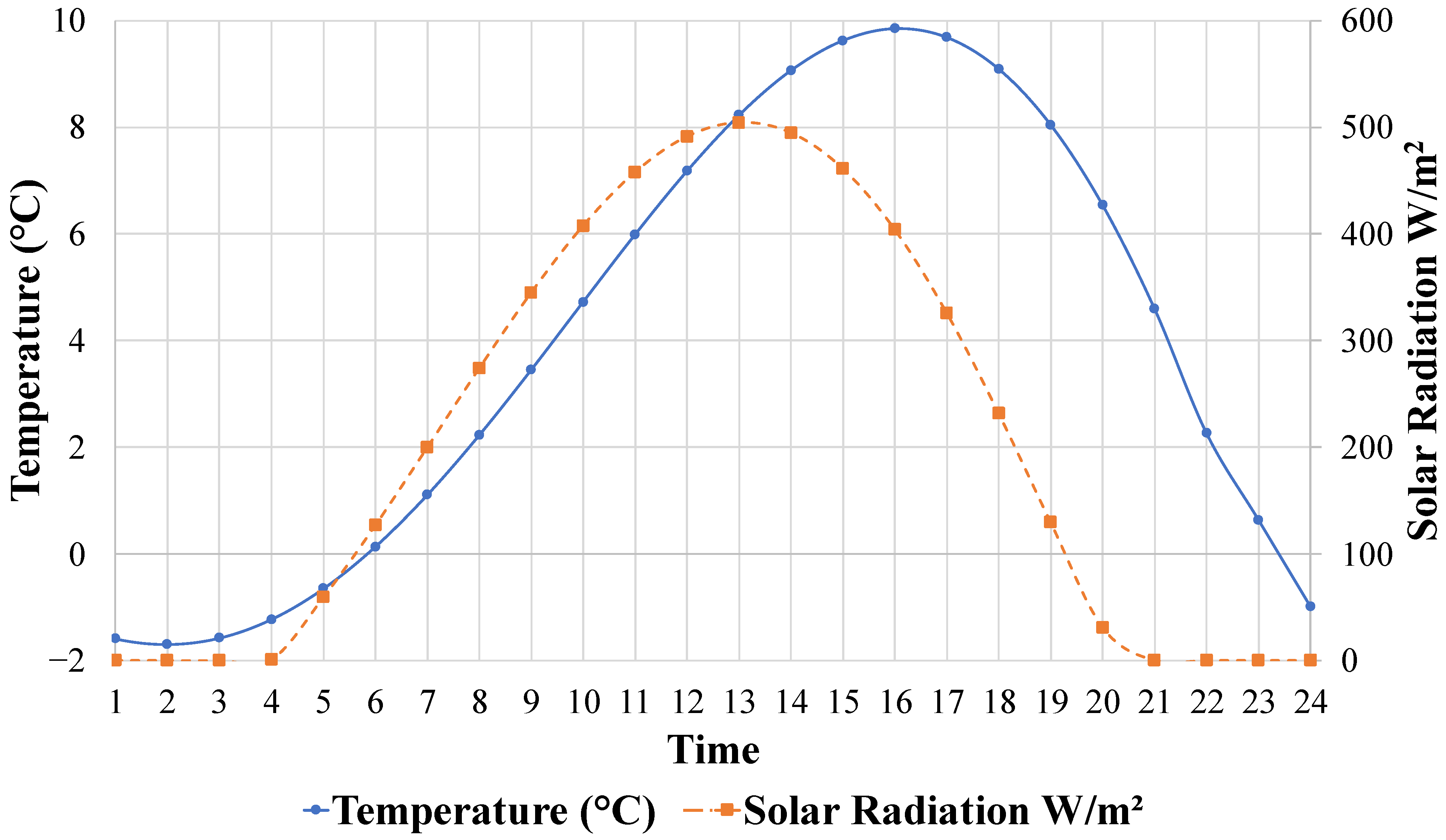
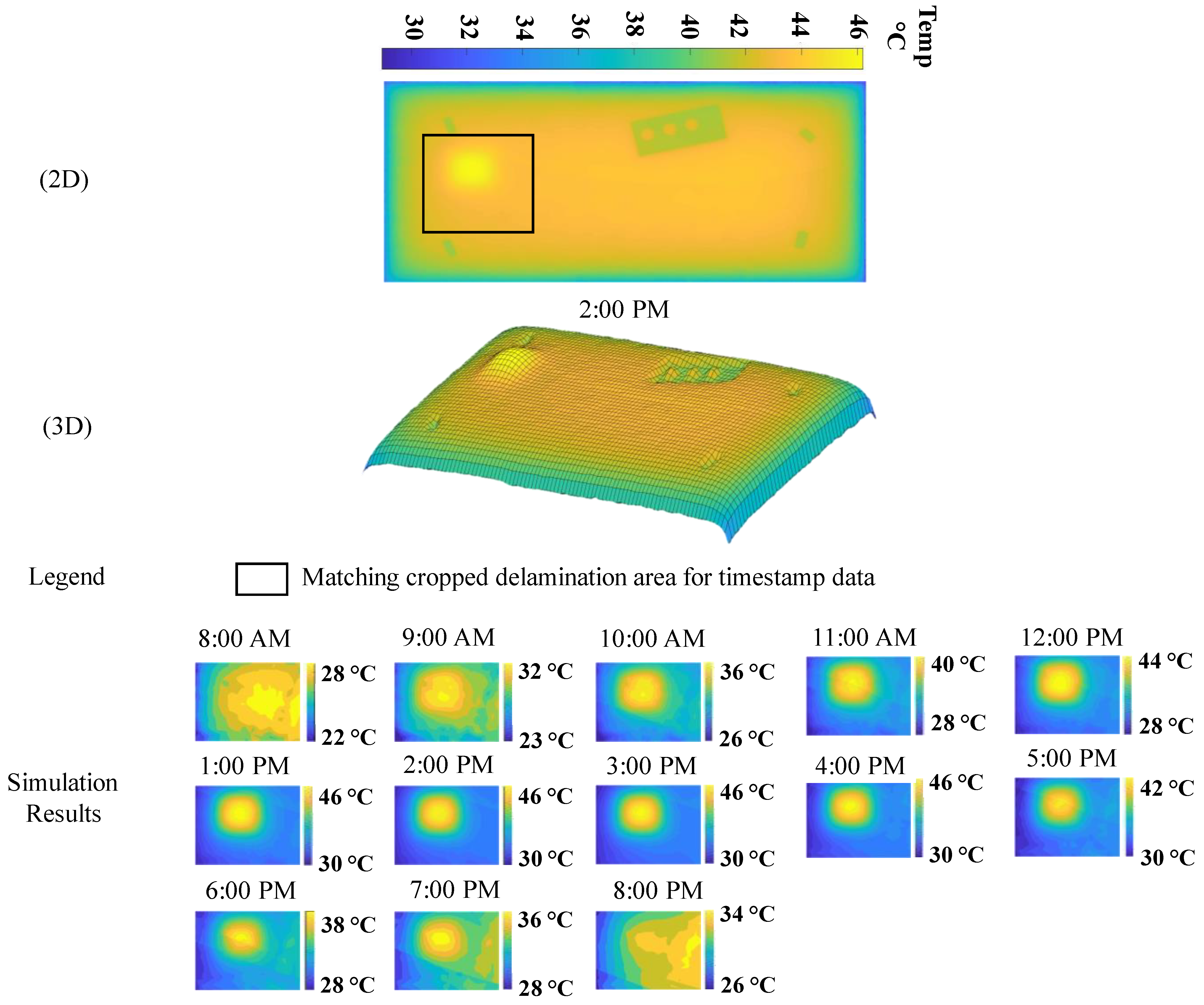
3.4. Numerical Simulation
3.5. In-Service Bridge Data Collection Dates, Times, and Framework

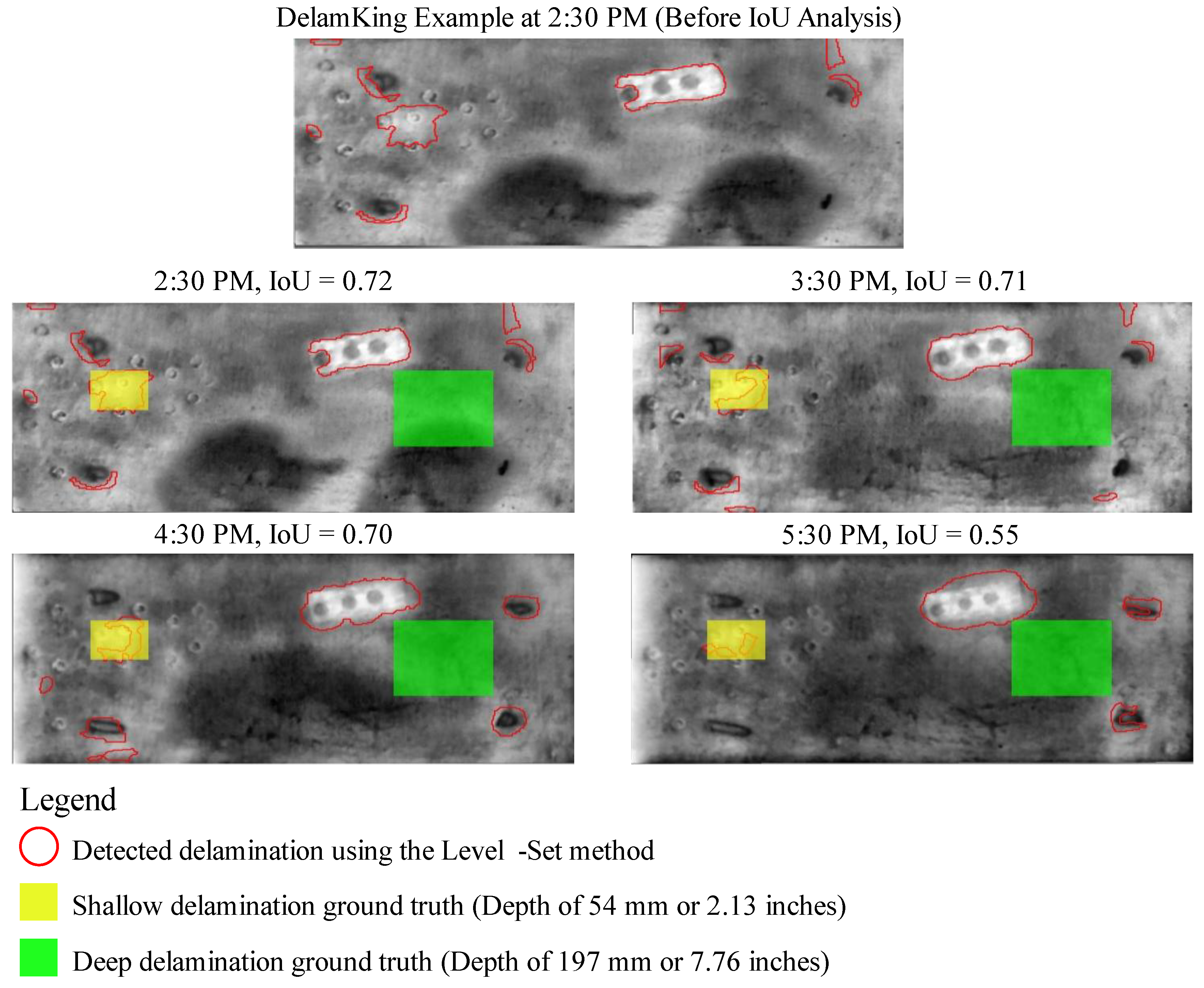
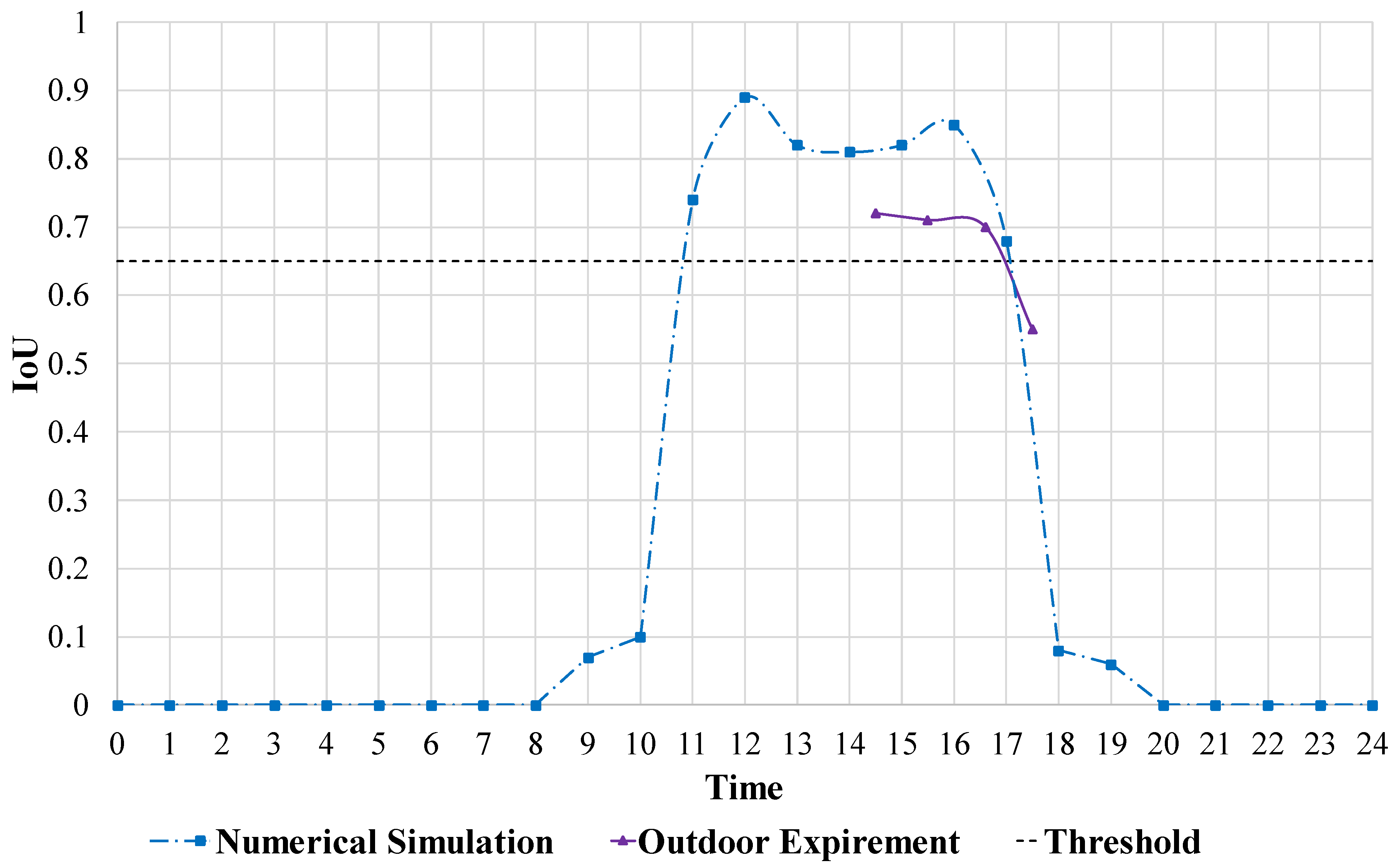
3.6. Evaluation Method: Intersection over Union (IoU)
4. Results and Discussion
4.1. Outdoor Experiment Results
4.2. Numerical Simulation Results
4.3. In-Service Bridge Results
4.4. Consumer-Grade Thermal Camera Performance Evaluation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Broomfield, J. Corrosion of Steel in Concrete: Understanding, Investigation and Repair, 2nd ed.; CRC Press: London, UK; New York, NY, USA, 2006; ISBN 978-0-415-33404-4. [Google Scholar]
- Portland Cement Association. Types and Causes of Deterioration in Concrete; Portland Cement Association: Skokie, IL, USA, 2002. [Google Scholar]
- Alonso, C.; Andrade, C.; Rodriguez, J.; Diez, J.M. Factors Controlling Cracking of Concrete Affected by Reinforcement Corrosion. Mater. Struct. 1998, 31, 435–441. [Google Scholar] [CrossRef]
- Cady, P.D.; Weyers, R.E. Deterioration Rates of Concrete Bridge Decks. J. Transp. Eng. 1984, 110, 34–44. [Google Scholar] [CrossRef]
- Omar, T.; Nehdi, M.L. Condition Assessment of Reinforced Concrete Bridges: Current Practice and Research Challenges. Infrastructures 2018, 3, 36. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Zhu, J.; Ham, S. Acoustic Evaluation of Concrete Delaminations Using Ball-Chain Impact Excitation. J. Acoust. Soc. Am. 2017, 141, EL477–EL481. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- ASTM D4580/D4580M-12; Standard Practice for Measuring Delaminations in Concrete Bridge Decks by Sounding. ASTM: West Conshohocken, PA, USA, 2018.
- Krauss, P.D.; Lawler, J.S.; Steiner, K.A. Guidelines for Selection of Bridge Deck Overlays, Sealers and Treatments; National Cooperative Highway Research Program (NCHRP); FHWA: Washington, DC, USA, 2009; p. 111.
- Brencich, A.; Cassini, G.; Pera, D.; Riotto, G. Calibration and Reliability of the Rebound (Schmidt) Hammer Test. Civ. Eng. Archit. 2013, 1, 66–78. [Google Scholar] [CrossRef]
- Sun, H.; Pashoutani, S.; Zhu, J. Nondestructive Evaluation of Concrete Bridge Decks with Automated Acoustic Scanning System and Ground Penetrating Radar. Sensors 2018, 18, 1955. [Google Scholar] [CrossRef] [Green Version]
- Scott, M.; Rezaizadeh, A.; Delahaza, A.; Santos, C.G.; Moore, M.; Graybeal, B.; Washer, G. A Comparison of Nondestructive Evaluation Methods for Bridge Deck Assessment. NDT E Int. 2003, 36, 245–255. [Google Scholar] [CrossRef]
- Gucunski, N.; Kee, S.-H.; La, H.; Basily, B.; Maher, A. Delamination and Concrete Quality Assessment of Concrete Bridge Decks Using a Fully Autonomous RABIT Platform. Struct. Monit. Maint. 2015, 2, 19–34. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Popovics, J. Imaging Concrete Structures Using Air-Coupled Impact-Echo. J. Eng. Mech. 2007, 133.6, 628–640. [Google Scholar] [CrossRef]
- Zhang, G.; Harichandran, R.S.; Ramuhalli, P. An Automatic Impact-Based Delamination Detection System for Concrete Bridge Decks. NDT E Int. 2012, 45, 120–127. [Google Scholar] [CrossRef]
- Clem, D.J.; Schumacher, T.; Deshon, J.P. A Consistent Approach for Processing and Interpretation of Data from Concrete Bridge Members Collected with a Hand-Held GPR Device. Constr. Build. Mater. 2015, 86, 140–148. [Google Scholar] [CrossRef]
- Azari, H.; Yuan, D.; Nazarian, S.; Gucunski, N. Sonic Methods to Detect Delamination in Concrete Bridge Decks: Impact of Testing Configuration and Data Analysis Approach. Transp. Res. Rec. 2012, 2292, 113–124. [Google Scholar] [CrossRef]
- Shokouhi, P.; Wolf, J.; Wiggenhauser, H. Detection of Delamination in Concrete Bridge Decks by Joint Amplitude and Phase Analysis of Ultrasonic Array Measurements. J. Bridge Eng. 2014, 19, 04013005. [Google Scholar] [CrossRef]
- Garrido, I.; Lagüela, S.; Otero, R.; Arias, P. Thermographic Methodologies Used in Infrastructure Inspection: A Review—Post-Processing Procedures. Appl. Energy 2020, 266, 114857. [Google Scholar] [CrossRef]
- Shen, Z.; Cheng, C.; Na, R.; Shang, Z.; Charles, W. To Automate Detecting, Quantifying and Mapping of Delamination via Arial Thermography; Nebraska Department of Transportation: Lincoln, NE, USA, 2020; p. 44.
- Tomita, K.; Chew, M.Y.L. A Review of Infrared Thermography for Delamination Detection on Infrastructures and Buildings. Sensors 2022, 22, 423. [Google Scholar] [CrossRef]
- Sultan, A.A.; Washer, G.A. Comparison of Two Nondestructive Evaluation Technologies for the Condition Assessment of Bridge Decks. Transp. Res. Rec. 2018, 2672, 113–122. [Google Scholar] [CrossRef]
- Gucunski, N. National Research Council. Nondestructive Testing to Identify Concrete Bridge Deck Deterioration; Transportation Research Board: Washington, DC, USA, 2013.
- Janků, M.; Cikrle, P.; Grošek, J.; Anton, O.; Stryk, J. Comparison of Infrared Thermography, Ground-Penetrating Radar and Ultrasonic Pulse Echo for Detecting Delaminations in Concrete Bridges. Constr. Build. Mater. 2019, 225, 1098–1111. [Google Scholar] [CrossRef]
- Cheng, C.; Shen, Z. The Application of Gray-Scale Level-Set Method in Segmentation of Concrete Deck Delamination Using Infrared Images. Constr. Build. Mater. 2020, 240, 117974. [Google Scholar] [CrossRef]
- Walker, N. Infrared Thermography Handbook–Volume 1. Principles and Practice; The British Institute of Non-Destructive Testing: Northampton, UK, 2004; Volume 1, ISBN 0 903 132 338. [Google Scholar]
- Hiasa, S.; Birgul, R.; Catbas, F.N. Investigation of Effective Utilization of Infrared Thermography (IRT) through Advanced Finite Element Modeling. Constr. Build. Mater. 2017, 150, 295–309. [Google Scholar] [CrossRef]
- Hiasa, S.; Birgul, R.; Catbas, F.N. Infrared Thermography for Civil Structural Assessment: Demonstrations with Laboratory and Field Studies. J. Civ. Struct. Health Monit. 2016, 6, 619–636. [Google Scholar] [CrossRef]
- Hiasa, S.; Catbas, F.N.; Matsumoto, M.; Mitani, K. Monitoring Concrete Bridge Decks Using Infrared Thermography with High Speed Vehicles. Struct. Monit. Maint. 2016, 3, 277–296. [Google Scholar] [CrossRef]
- Hiasa, S.; Birgul, R.; Catbas, F.N. Effect of Defect Size on Subsurface Defect Detectability and Defect Depth Estimation for Concrete Structures by Infrared Thermography. J. Nondestruct. Eval. 2017, 36, 57. [Google Scholar] [CrossRef]
- Hiasa, S.; Birgul, R.; Necati Catbas, F. A Data Processing Methodology for Infrared Thermography Images of Concrete Bridges. Comput. Struct. 2017, 190, 205–218. [Google Scholar] [CrossRef]
- Cheng, C.; Shang, Z.; Shen, Z. Bridge Deck Delamination Segmentation Based on Aerial Thermography Through Regularized Grayscale Morphological Reconstruction and Gradient Statistics. Infrared Phys. Technol. 2019, 98, 240–249. [Google Scholar] [CrossRef] [Green Version]
- Raja, B.N.K.; Miramini, S.; Duffield, C.; Sofi, M.; Mendis, P.; Zhang, L. The Influence of Ambient Environmental Conditions in Detecting Bridge Concrete Deck Delamination Using Infrared Thermography (IRT). Struct. Control Health Monit. 2020, 27, e2506. [Google Scholar] [CrossRef]
- Omar, T.; Nehdi, M.L. Remote Sensing of Concrete Bridge Decks Using Unmanned Aerial Vehicle Infrared Thermography. Autom. Constr. 2017, 83, 360–371. [Google Scholar] [CrossRef]
- Omar, T.; Nehdi, M.L.; Zayed, T. Infrared Thermography Model for Automated Detection of Delamination in RC Bridge Decks. Constr. Build. Mater. 2018, 168, 313–327. [Google Scholar] [CrossRef]
- Hiasa, S.; Birgul, R.; Matsumoto, M.; Necati Catbas, F. Experimental and Numerical Studies for Suitable Infrared Thermography Implementation on Concrete Bridge Decks. Measurement 2018, 121, 144–159. [Google Scholar] [CrossRef]
- Cheng, C.; Na, R.; Shen, Z. Thermographic Laplacian-Pyramid Filtering to Enhance Delamination Detection in Concrete Structure. Infrared Phys. Technol. 2019, 97, 162–176. [Google Scholar] [CrossRef] [Green Version]
- Cheng, C.; Shang, Z.; Shen, Z. Automatic Delamination Segmentation for Bridge Deck Based on Encoder-Decoder Deep Learning through UAV-Based Thermography. NDT E Int. 2020, 116, 102341. [Google Scholar] [CrossRef]
- Sultan, A.A.; Washer, G. A Pixel-by-Pixel Reliability Analysis of Infrared Thermography (IRT) for the Detection of Subsurface Delamination. NDT E Int. 2017, 92, 177–186. [Google Scholar] [CrossRef]
- Abu Dabous, S.; Yaghi, S.; Alkass, S.; Moselhi, O. Concrete Bridge Deck Condition Assessment Using IR Thermography and Ground Penetrating Radar Technologies. Autom. Constr. 2017, 81, 340–354. [Google Scholar] [CrossRef]
- Pozzer, S.; Dalla Rosa, F.; Pravia, Z.M.C.; Rezazadeh Azar, E.; Maldague, X. Long-Term Numerical Analysis of Subsurface Delamination Detection in Concrete Slabs via Infrared Thermography. Appl. Sci. 2021, 11, 4323. [Google Scholar] [CrossRef]
- Chun, P.; Hayashi, S. Development of a Concrete Floating and Delamination Detection System Using Infrared Thermography. IEEEASME Trans. Mechatron. 2021, 26, 2835–2844. [Google Scholar] [CrossRef]
- Kee, S.-H.; Oh, T.; Popovics, J.S.; Arndt, R.W.; Zhu, J. Nondestructive Bridge Deck Testing with Air-Coupled Impact-Echo and Infrared Thermography. J. Bridge Eng. 2012, 17, 928–939. [Google Scholar] [CrossRef]
- Knorr, R.E.; Buba, J.M.; Kogut, G.P. Bridge Rehabilitation Programming by Using Infrared Techniques (Abridgment). Transp. Res. Rec. 1983, 899, 32–34. [Google Scholar]
- Detection of Concrete Delamination by Infrared Thermography; HR-244; National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1986.
- Moore, M.; Rolander, D.; Benjamin, G.; Phares, B. Highway Bridge Inspection: State-of-the-Practice Survey; FHWA, U.S. Department of Transportation: Atlanta, GA, USA, 2001; p. 81.
- Rolander, D.D.; Phares, B.M.; Graybeal, B.A.; Moore, M.E.; Washer, G.A. Highway Bridge Inspection: State-of-the-Practice Survey. Transp. Res. Rec. 2001, 1749, 73–81. [Google Scholar] [CrossRef]
- Rocha, J.H.A.; Póvoas, Y.V.; Santos, C.F. Detection of Delaminations in Sunlight-Unexposed Concrete Elements of Bridges Using Infrared Thermography. J. Nondestruct. Eval. 2018, 38, 8. [Google Scholar] [CrossRef]
- DelDOT. Standard Specifications for Road and Bridge Construction; The State of Delaware Department of Transportation: Dover, DE, USA, 2022; p. 731.
- Khan, F.; Ellenberg, A.; Mazzotti, M.; Kontsos, A.; Moon, F.; Pradhan, A.; Bartoli, I. Investigation on Bridge Assessment Using Unmanned Aerial Systems. Struct. Congr. 2015, 2015, 404–413. [Google Scholar] [CrossRef]
- Watase, A.; Birgul, R.; Hiasa, S.; Matsumoto, M.; Mitani, K.; Catbas, F.N. Practical Identification of Favorable Time Windows for Infrared Thermography for Concrete Bridge Evaluation. Constr. Build. Mater. 2015, 101, 1016–1030. [Google Scholar] [CrossRef]
- Oh, T.; Kee, S.-H.; Arndt, R.W.; Popovics, J.S.; Zhu, J. Comparison of NDT Methods for Assessment of a Concrete Bridge Deck. J. Eng. Mech. 2013, 139, 305–314. [Google Scholar] [CrossRef]
- Hiasa, S.; Necati Catbas, F.; Matsumoto, M.; Mitani, K. Considerations and Issues in the Utilization of Infrared Thermography for Concrete Bridge Inspection at Normal Driving Speeds. J. Bridge Eng. 2017, 22, 04017101. [Google Scholar] [CrossRef]
- FLIR. A8300sc User’s Manual; FLIR systems, Inc.: Wilsonville, OR, USA, 2015. [Google Scholar]
- Domaneschi, M.; Casciati, S.; Catbas, N.; Cimellaro, G.P.; Inaudi, D.; Marano, G.C. Structural Health Monitoring of In-Service Tunnels. Int. J. Sustain. Mater. Struct. Syst. 2020, 4, 268–291. [Google Scholar] [CrossRef]
- Deane, S.; Avdelidis, N.P.; Ibarra-Castanedo, C.; Williamson, A.A.; Withers, S.; Zolotas, A.; Maldague, X.P.V.; Ahmadi, M.; Pant, S.; Genest, M.; et al. Development of a Thermal Excitation Source Used in an Active Thermographic UAV Platform. Quant. InfraRed Thermogr. J. 2022, 1–32. [Google Scholar] [CrossRef]
- Tran, Q.H. Passive and Active Infrared Thermography Techniques in Nondestructive Evaluation for Concrete Bridge. AIP Conf. Proc. 2021, 2420, 050008. [Google Scholar] [CrossRef]
- Deane, S.; Avdelidis, N.P.; Ibarra-Castanedo, C.; Zhang, H.; Nezhad, H.Y.; Williamson, A.A.; Mackley, T.; Maldague, X.; Tsourdos, A.; Nooralishahi, P. Comparison of Cooled and Uncooled IR Sensors by Means of Signal-to-Noise Ratio for NDT Diagnostics of Aerospace Grade Composites. Sensors 2020, 20, 3381. [Google Scholar] [CrossRef]
- Cooled or Uncooled? Available online: https://www.flir.com/discover/rd-science/cooled-or-uncooled/ (accessed on 26 October 2022).
- Matsumoto, M.; Mitani, K.; Catbas, F.N. Bridge Assessment Methods Using Image Processing and Infrared Thermography Technology: On-Site Pilot Application in Florida; National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2013. [Google Scholar]
- Cheng, C.; Shen, Z. DelamKing; 2021. [Google Scholar]
- DJI. Inspire 1 User Manual; DJI: Shenzhen, China, 2017; p. 64. [Google Scholar]
- DJI. ZENMUSE XT User Manual; DJI: Shenzhen, China, 2016; p. 19. [Google Scholar]
- Zenmuse X3-Product Information-DJI. Available online: https://www.dji.com/zenmuse-x3/info (accessed on 5 June 2022).
- DJI. Matrice 600 Pro User Manual; DJI: Shenzhen, China, 2018; p. 64. [Google Scholar]
- MoviTHERM FLIR A8300sc MWIR. Available online: https://movitherm.com/products/infrared-cameras/science-research/flir-a8300sc-mwir/ (accessed on 5 June 2022).
- DJI. ZENMUSE X5 User Manual; DJI: Shenzhen, China, 2016; p. 18. [Google Scholar]
- DEOS DEOS Daily Data. Available online: http://www.deos.udel.edu/data/daily_retrieval.php (accessed on 14 June 2021).
- DelDOT. Bridge Deck Evaluation Report–Bare Concrete Bridge Deck Evaluations New Castle County, Delaware; Delaware Department of Transportation: Dover, DE, USA, 2016.
- Visual Crossing Corporation Weather Data Services | Visual Crossing. Available online: https://www.visualcrossing.com/weather/weather-data-services# (accessed on 26 May 2022).
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression. arXiv 2019, arXiv:190209630 Cs. [Google Scholar]
- Wu, Y.; Lin, Y.; Zhou, Z.; Bolton, D.C.; Liu, J.; Johnson, P. DeepDetect: A Cascaded Region-Based Densely Connected Network for Seismic Event Detection. IEEE Trans. Geosci. Remote Sens. 2019, 57, 62–75. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Erfani, S.; Ma, X.; Bailey, J.; Chi, Y.; Hua, X.-S. Alpha-IoU: A Family of Power Intersection over Union Losses for Bounding Box Regression. arXiv 2022, arXiv:211013675 Cs. [Google Scholar]
- Montgomery, D.C. Design and Analysis of Experiments, 10th ed.; Wiley: Hoboken, NJ, USA, 2019; ISBN 978-1-119-49244-3. [Google Scholar]
- Moore, D.S.; Notz, W.I.; Flinger, M. The Basic Practice of Statistics, 9th ed; Macmillan Learning for Instructors, 2021; ISBN 978-1-319-34463-4. Available online: http://web.ntpu.edu.tw/~hlw/Notes/bps3ed/bps_ch17.pdf (accessed on 26 May 2022).
- Ott, R.L.; Longnecker, M.T. An Introduction to Statistical Methods and Data Analysis, 7th ed.; Cengage Learning: South Melbourne, Australia, 2015; ISBN 978-1-305-26947-7. [Google Scholar]
- ASTM D4788-03; Standard Test Method for Detecting Delaminations in Bridge Decks Using Infrared Thermography. ASTM: West Conshohocken, PA, USA, 2022.
- Washer, G.; Fenwick, R.; Nelson, S.; Rumbayan, R. Guidelines for Thermographic Inspection of Concrete Bridge Components in Shaded Conditions. Transp. Res. Rec. 2013, 2360, 13–20. [Google Scholar] [CrossRef]
- Washer, G.; Fenwick, R.; Bolleni, N. Effects of Solar Loading on Infrared Imaging of Subsurface Features in Concrete. J. Bridge Eng. 2010, 15, 384–390. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Thermal Camera | Detector Type | Thermal Sensitivity (K) | Resolution (Pixels) | Spectral Range (µm) | Scene Range (°C) | Temperature Accuracy (°C) | Weight (kg) | Cost |
|---|---|---|---|---|---|---|---|---|
| DJI Zenmuse XT | VOx Microbolometer | ±0.05 | 640 × 512 | 7.5–13.5 | −25 to 135 | ±20 | 0.27 | Low–Medium |
| FLIR A8300 | Indium Antimonide (InSb) | ±0.02 | 1280 × 720 | 3.0–5.0 | −20 to 350 | ±2 [53] | 4.54 [19] | High |
| Dataset | Validation Method |
|---|---|
| Outdoor experiment * | Current literature accuracies and numerical simulation [24] |
| Transient numerical simulation * | Current literature accuracies [24] |
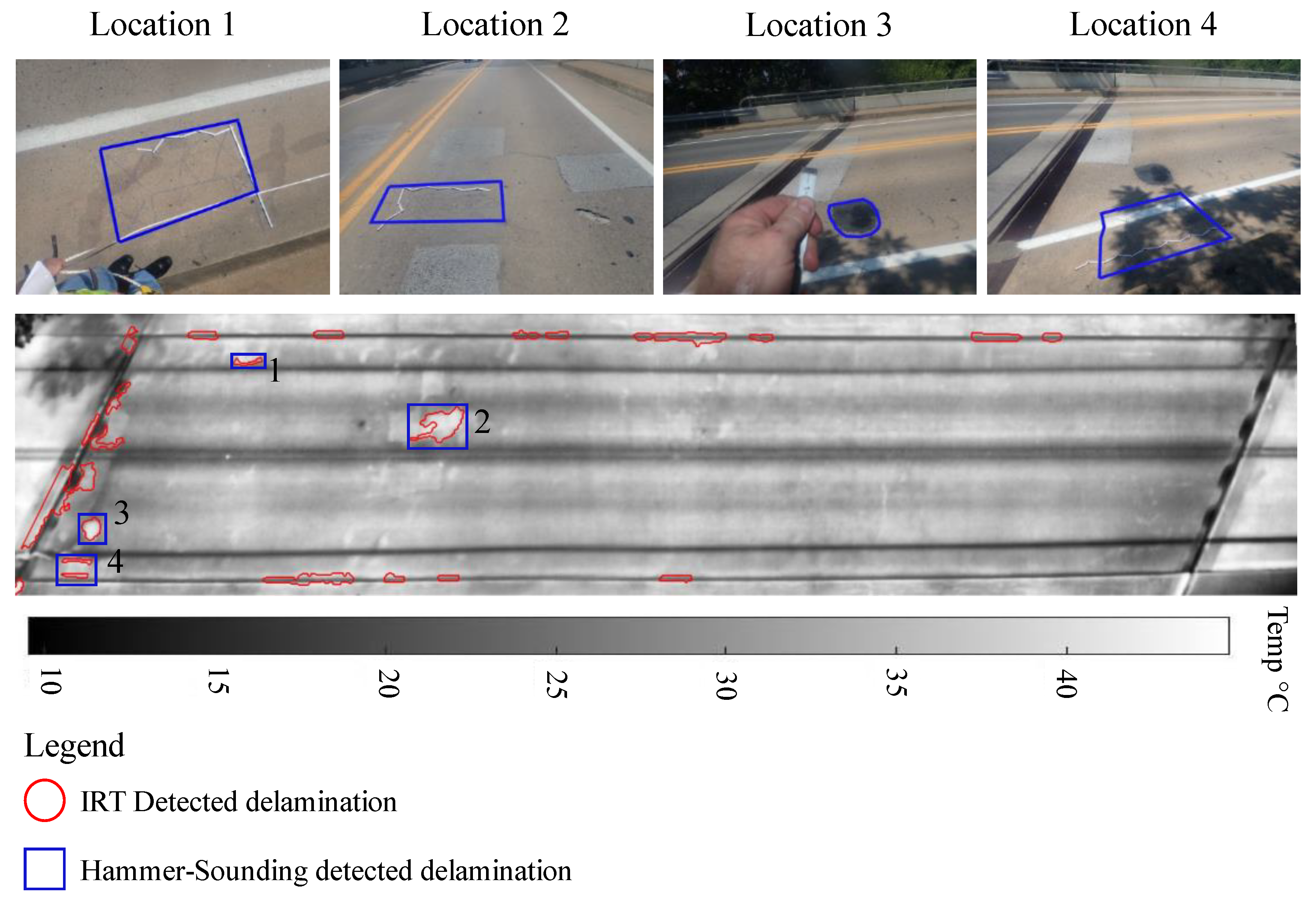
| Apple Rd bridge (Delaware) | Hammer-sounding |
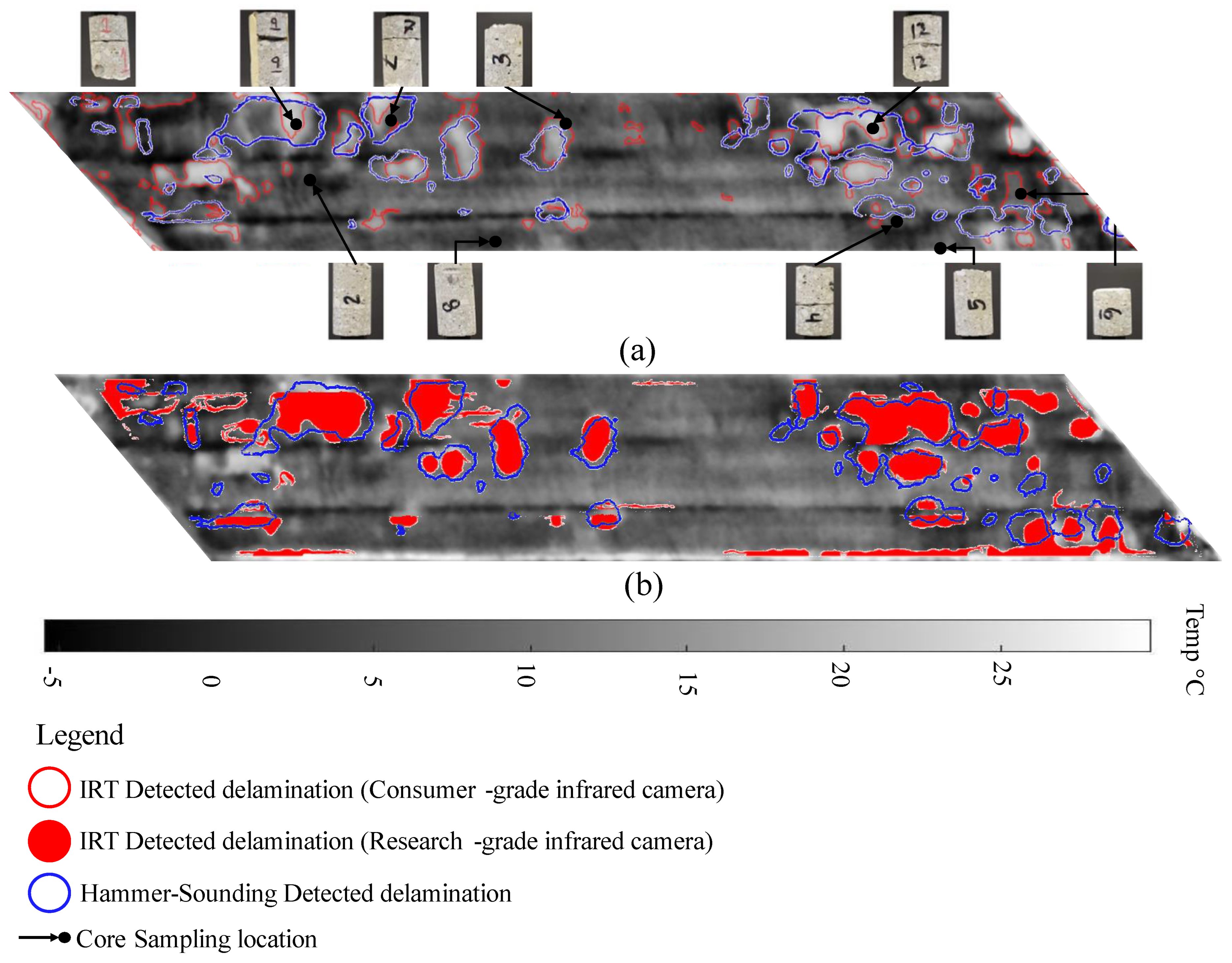
| US-77 bridge (Nebraska) * | Hammer-sounding, core sampling, and research-grade thermal camera dataset |
| RGB Camera | Size (mm) | Imaging Sensor (mm) | Image Resolution (pixels) | Focal Range (mm) | ISO Range | Spectral Bands | Weight (kg) |
|---|---|---|---|---|---|---|---|
| Zenmuse X3 | 75 × 95 × 105 | CMOS 6.17 × 4.5 | 4000 × 3000 | 3.6 | 100~3200 | RGB or Converted-NIR | 0.215 |
| Zenmuse X5 | 120 × 135 × 140 | CMOS 18 × 13.5 | 4608 × 3456 | Variable | 100~25,600 | RGB or Converted-NIR | 0.530 |
| Drone | Size (mm) | Hovering Accuracy (m) * | Max Flight Time (min) | Maximum Weight of Payload (kg) | Weight (kg) |
|---|---|---|---|---|---|
| DJI Inspire 1 | 438 × 451 × 301 | V: ±0.5, H: ±2.5 | 18 | 3.5 | 3.06 |
| M600 Pro | 1668 × 1518 × 727 | V: ±0.5, H: ±1.5 | 16 | 5.5 | 10 |
| Parameter | Unit | Value |
|---|---|---|
| Ambient Air Temperature | °C | DEOS [67] |
| Film Coefficient | W/m2/K | 5 |
| Latitude and Longitude | - | 39°40′ N, 75°45′ W |
| Solar Flux Constant | W/m2 | 350 |
| Variable | Temperature (°C) | Solar Radiance (W·m−2) |
|---|---|---|
| R2 (coefficient of determination) | 0.559 | 0.705 |
| p-Value | 1.74 × 10−5 | 1.54 × 10−7 |
| Thermal Camera | IoU |
|---|---|
| Cooled research-grade thermal camera (FLIR A8300sc) | 0.4462 [24] |
| Uncooled consumer-grade thermal camera (DJI Zenmuse XT) | 0.3923 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aljagoub, D.; Na, R.; Cheng, C.; Shen, Z. Performance Evaluation of Uncooled UAV Infrared Camera in Detecting Concrete Delamination. Infrastructures 2022, 7, 163. https://doi.org/10.3390/infrastructures7120163
Aljagoub D, Na R, Cheng C, Shen Z. Performance Evaluation of Uncooled UAV Infrared Camera in Detecting Concrete Delamination. Infrastructures. 2022; 7(12):163. https://doi.org/10.3390/infrastructures7120163
Chicago/Turabian StyleAljagoub, Dyala, Ri Na, Chongsheng Cheng, and Zhigang Shen. 2022. "Performance Evaluation of Uncooled UAV Infrared Camera in Detecting Concrete Delamination" Infrastructures 7, no. 12: 163. https://doi.org/10.3390/infrastructures7120163
APA StyleAljagoub, D., Na, R., Cheng, C., & Shen, Z. (2022). Performance Evaluation of Uncooled UAV Infrared Camera in Detecting Concrete Delamination. Infrastructures, 7(12), 163. https://doi.org/10.3390/infrastructures7120163