
Human-Robot Interaction in Groups: Methodological and Research Practices


Abstract
:1. Introduction
If you look at the field of robotics today, you can say robots have been in the deepest oceans, they’ve been to Mars, you know? They’ve been all these places, but they’re just now starting to come into your living room. Your living room is the final frontier for robots.
Cynthia Breazeal (Retrieved from https://cyberbotics.engineering.osu.edu/ (accessed on 16 June 2021).)
Framework and Goals
2. Social Psychology: What Makes a Group?
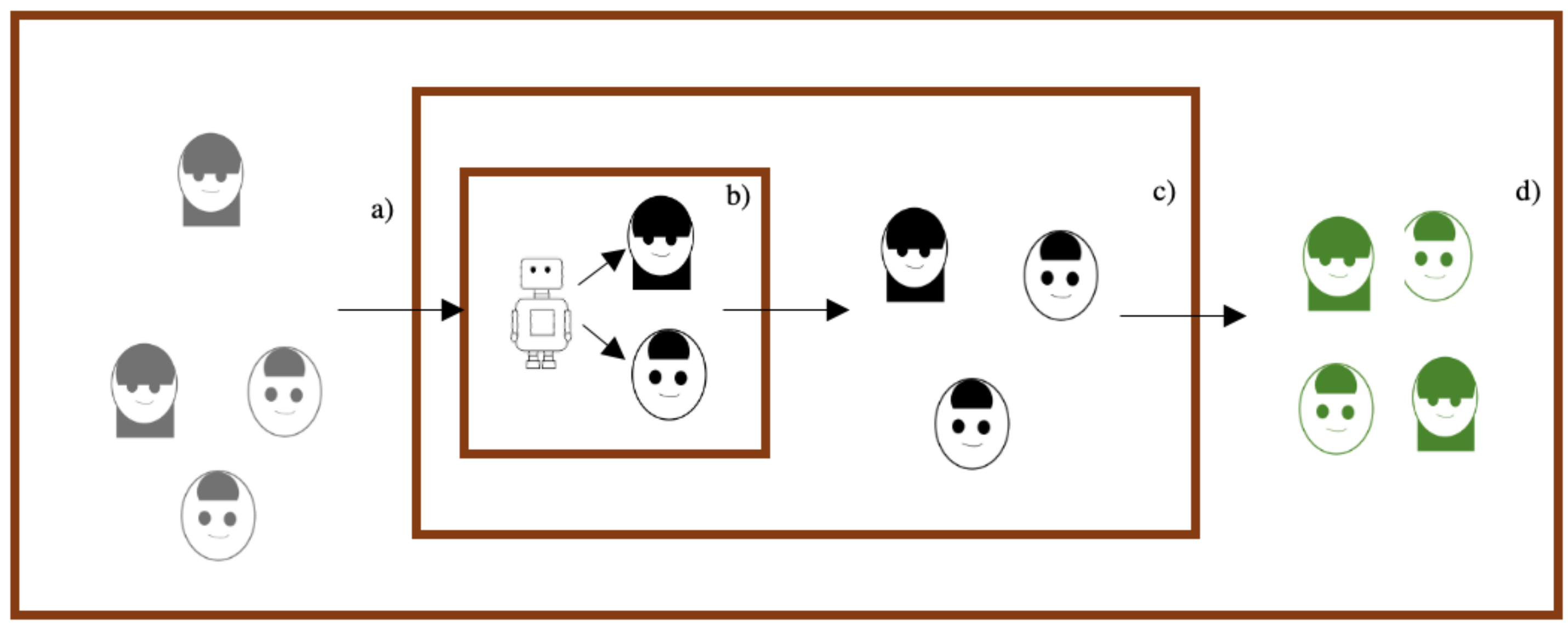
3. Groups of Humans and Robots
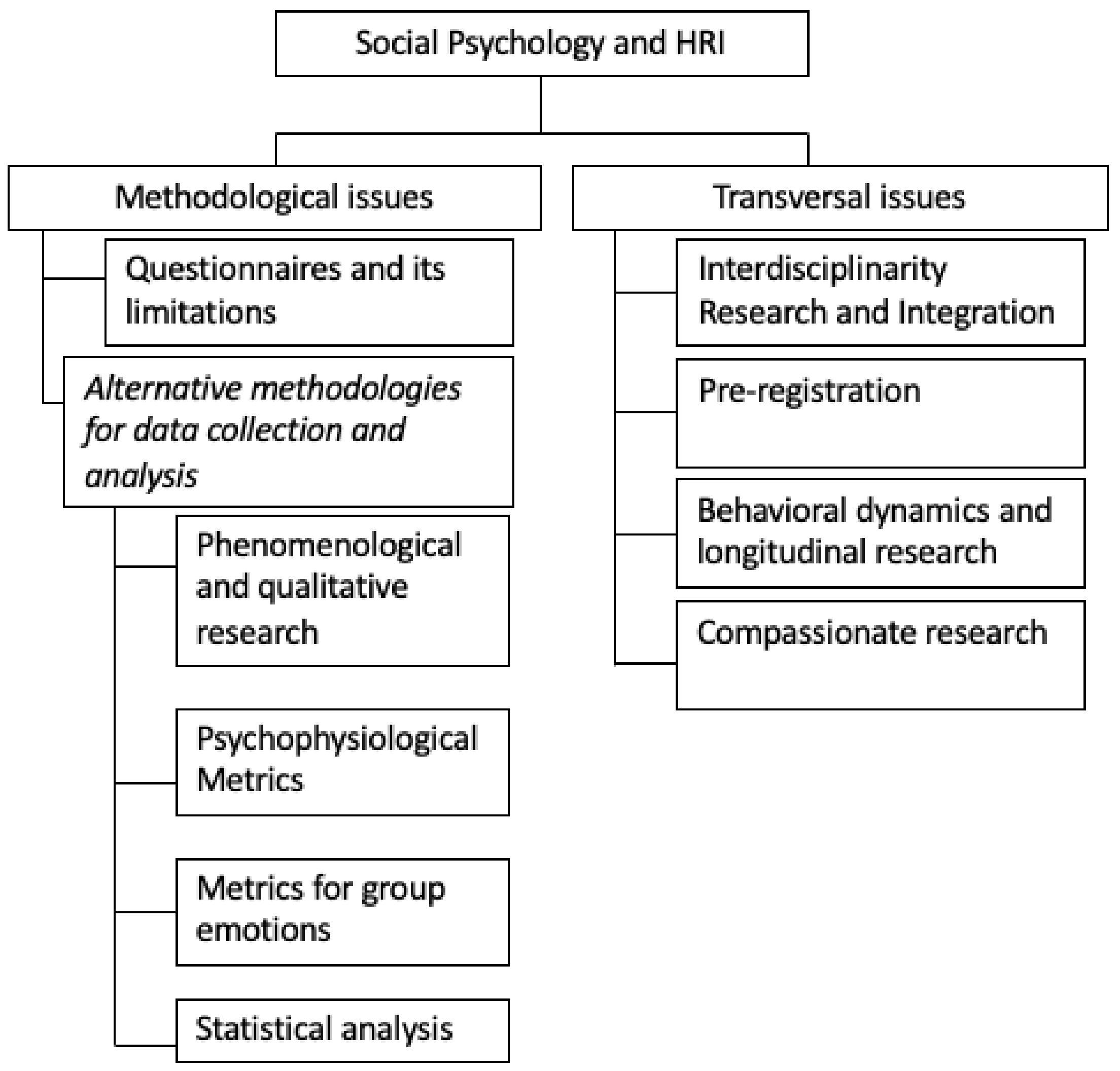
4. HRI Research Methodology
4.1. The Issue of Measurement
4.2. Moving Beyond Questionnaires
4.2.1. Phenomenological and Other Types of Qualitative Research

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Collection Method | Advantages | Shortcomings | Example of Application |
|---|---|---|---|
| Questionnaires | -Cost-friendly [76]; | -Questionnaire fatigue [76,77]; | A research team is interested in evaluating whether the level of competence displayed by a robot in a group competitive task influences participant’s perceptions of the robot and their willingness to interact with the robot again. They can employ pre-developed questionnaires (e.g., RoSAS [56] for the perception) or create ad hoc questions (e.g., [78], for the willingness to interact again in the future). |
| -Easy application [76]; | -Lack of nuance [77]; | ||
| -Widely used (familiar) [76,79]; | -Accessibility issues [77]; | ||
| -Scalability [77] | -If not properly validated and evaluated, can produce biased data [77]. | ||
| Focus groups | -Less time consuming than other similar methods (interviews; [76]); | -More time consuming than questionnaires [80]; | Researchers intend to develop a robot for therapy, so they consult a group of experts (therapists) to get their feedback about key development issues (e.g., [81]). |
| -Allows the exploration and in-depth discussion of important topics [76,80]; | -Researcher has less control over the data generated [76,82]; | ||
| -It can reach many participants simultaneously [82]. | -Data can be difficult to analyze and interpret [82]. | ||
| Dary-keeping | -Allows us to see how participants’ perceptions evolve over time [83,84]; | -If the goals are not well-defined and transmitted to participants, relevant information might not be recorded [83]; | Researchers are interested in evaluating the acceptance and user’s opinions about a social robot that has been implemented in the users’ home (e.g., [85]). |
| -Experiences and opinions are recorded closer to when they happen, and not in hindsight [84]; | -Participants might not be motivated to journal frequently [86]; | ||
| -Allows us to capture external factors that can influence user’s feelings and opinions [84,86]. | -Data can be difficult to interpret and analyze [84,86]. | ||
| Interviews | -Allows exploration of user’s opinions, feelings and experiences [87]; | -Time consuming [87,88]; | Researchers seek to develop a social robot that can help blind users with daily tasks, so they conduct interviews with blind users, in which they obtain their feedback about desired functionalities (e.g., [70]). |
| -It provides flexibility in the topics explored [87] | -Interviewers must be trained and develop an interview script a priori [87,88]; | ||
| -Interviewer can take into account the non-verbal behavior of the interviewee [76]. | -Can be costly due to the need for having dedicated facilities (i.e., rooms) and the possible need for dislocation to meet participants [76,87]. | ||
| Observation of behaviors | -Allows direct observation of behavior; | -Internal states (e.g., motivation for a specific behavior) are not observable [89]; | A research team is interested in understanding how different roles (partner vs. opponent) and different goal-orientations (competitive vs. collaborative) can influence group interactions in entertainment settings [43]; |
| -Allows for the accounting of different types of behavior (e.g., verbal, non-verbal [89]); | -Can be costly and time-consuming [90,91]; | ||
| -Allows us to collect data from several individuals simultaneously [90,91]. | -It can result in a large amount of data that can be difficult to analyze and interpret [89,90]. | ||
| Psychophysiological metrics | -Allows for real-time data recording [92]; | -Requires very specific expertise to collect and analyze data [92]; | A research team wants to implement context-sensitive robotic behaviors according to participants’ level of anxiety, thus achieving improved implicit communication between user and robot [93]. |
| -Psychophysiological responses are not under the voluntary control of participants, so they are difficult to fake or manipulated [92]; | -Can be costly given that they require specific apparatus and tools; | ||
| -Humans are not always accurate in making judgements about their cognitive or internal states (e.g., [94]). | -Collection of phychophysiological data can feel intrusive to the participant [92]. |
4.2.2. Psychophysiological Metrics
4.2.3. Metrics for the Analysis of Group Emotions
4.3. Towards Improved Statistical Methods
5. Transversal Concerns
5.1. Interdisciplinarity Research and Integration
5.2. Pre-Registration
5.3. Behavioral Dynamics and Longitudinal Research
5.4. Compassionate Research
6. Discussion and Future Endeavours
- Triangulation of different types of measures is key in avoiding biases that can influence the data collected or the researchers’ interpretation of it;
- Some of the alternatives to questionnaires in terms of data collection include, for instance, psychophysiological metrics, focus groups, journal-keeping, observation and codification of behaviours occurring during HRI in groups;
- Developing, evaluating and validating instruments, particularly in the context of group HRI research, is fundamental if we want to ensure that we are measuring what we intend to be measuring and that our results are valid and generalizable to the population of interest;
- The application of adequate statistical analyses (e.g., multi-level modelling) is necessary to capture the complexity and dynamic nature of group interactions.
- Recognizing the interdisciplinarity of the research conducted under the umbrella of social robotics implies developing good management and integration strategies, that allow the inputs and insights of different fields of knowledge to be leveraged productively;
- Following the recognition of the importance of interdisciplinarity and the relevance of exploring the cultural specificities of group HRI, it becomes important to establish multi-country (and multi-lab) collaborations that can result in large-scale research projects;
- The spread of pre-registration practices and the sharing of data among researchers are important factors to ensure the reproducibility, transparency and rigour of the research produced;
- Increasing the efforts to investigate long-term and in-the-wild HRI in groups is fundamental for a better comprehension of how these relations initiate and develop over time (in other words, we emphasize the importance of considering human-robot relations, as opposed to human-robot interactions).
- We emphasize the importance of conducting compassionate research that is motivated primarily by the needs of potential users, in order to better leverage the social potential of social robots.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alemi, M.; Meghdari, A.; Ghazisaedy, M. Employing humanoid robots for teaching English language in Iranian junior high-schools. Int. J. Hum. Robot. 2014, 11, 1450022. [Google Scholar] [CrossRef]
- Leite, I.; Castellano, G.; Pereira, A.; Martinho, C.; Paiva, A. Long-term interactions with empathic robots: Evaluating perceived support in children. In International Conference on Social Robotics; Springer: Berlin/Heidelberg, Germany, 2012; pp. 298–307. [Google Scholar]
- Fuentes-Moraleda, L.; Lafuente-Ibañez, C.; Alvarez, N.F.; Villace-Molinero, T. Willingness to accept social robots in museums: An exploratory factor analysis according to visitor profile. Libr. Hi Tech 2021. [Google Scholar] [CrossRef]
- Yamazaki, A.; Yamazaki, K.; Burdelski, M.; Kuno, Y.; Fukushima, M. Coordination of verbal and non-verbal actions in human-robot interaction at museums and exhibitions. J. Pragmat. 2010, 42, 2398–2414. [Google Scholar] [CrossRef]
- Pang, W.C.; Wong, C.Y.; Seet, G. Exploring the use of robots for museum settings and for learning heritage languages and cultures at the chinese heritage centre. Presence Teleoperators Virtual Environ. 2018, 26, 420–435. [Google Scholar] [CrossRef]
- Aaltonen, I.; Arvola, A.; Heikkilä, P.; Lammi, H. Hello Pepper, may I tickle you? Children’s and adults’ responses to an entertainment robot at a shopping mall. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 53–54. [Google Scholar]
- Niemelä, M.; Heikkilä, P.; Lammi, H.; Oksman, V. A social robot in a shopping mall: Studies on acceptance and stakeholder expectations. In Social Robots: Technological, Societal and Ethical Aspects of Human-Robot Interaction; Springer: Berlin/Heidelberg, Germany, 2019; pp. 119–144. [Google Scholar]
- Niemelä, M.; Heikkilä, P.; Lammi, H. A social service robot in a shopping mall: Expectations of the management, retailers and consumers. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 227–228. [Google Scholar]
- Share, P.; Pender, J. Preparing for a robot future? Social professions, social robotics and the challenges ahead. Ir. J. Appl. Soc. Stud. 2018, 18, 4. [Google Scholar]
- Wilson, G.L.; Hanna, M.S. Groups in Context: Leadership and Participation in Small Groups; McGraw-Hill: New York, NY, USA, 1990. [Google Scholar]
- James, J. A preliminary study of the size determinant in small group interaction. Am. Sociol. Rev. 1951, 16, 474–477. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef] [Green Version]
- Sebo, S.; Stoll, B.; Scassellati, B.; Jung, M.F. Robots in groups and teams: A literature review. Proc. ACM Hum.-Comput. Interact. 2020, 4, 1–36. [Google Scholar] [CrossRef]
- Bougie, E.; Usborne, E.; de la Sablonniere, R.; Taylor, D.M. The cultural narratives of Francophone and Anglophone Quebecers: Using a historical perspective to explore the relationships among collective relative deprivation, in-group entitativity, and collective esteem. Br. J. Soc. Psychol. 2011, 50, 726–746. [Google Scholar] [CrossRef]
- Crawford, M.T.; Salaman, L. Entitativity, identity, and the fulfilment of psychological needs. J. Exp. Soc. Psychol. 2012, 48, 726–730. [Google Scholar] [CrossRef]
- Ommundsen, R.; Yakushko, O.; Van der Veer, K.; Ulleberg, P. Exploring the relationships between fear-related xenophobia, perceptions of out-group entitativity, and social contact in Norway. Psychol. Rep. 2013, 112, 109–124. [Google Scholar] [CrossRef]
- Smith, R.W.; Faro, D.; Burson, K.A. More for the many: The influence of entitativity on charitable giving. J. Consum. Res. 2013, 39, 961–976. [Google Scholar] [CrossRef] [Green Version]
- Crump, S.A.; Hamilton, D.L.; Sherman, S.J.; Lickel, B.; Thakkar, V. Group entitativity and similarity: Their differing patterns in perceptions of groups. Eur. J. Soc. Psychol. 2010, 40, 1212–1230. [Google Scholar] [CrossRef]
- Lickel, B.; Hamilton, D.L.; Wieczorkowska, G.; Lewis, A.; Sherman, S.J.; Uhles, A.N. Varieties of groups and the perception of group entitativity. J. Personal. Soc. Psychol. 2000, 78, 223. [Google Scholar] [CrossRef]
- Igarashi, T.; Kashima, Y. Perceived entitativity of social networks. J. Exp. Soc. Psychol. 2011, 47, 1048–1058. [Google Scholar] [CrossRef]
- Brewer, M.B.; Hong, Y.; Li, Q. Dynamic entitativity. Psychol. Group Percept. 2004, 19, 25–38. [Google Scholar]
- Forsyth, D. Group Dynamics 5th ed Belmont CA Wadsworth. Cengage Learn 2010. Available online: https://www.worldcat.org/title/group-dynamics/oclc/882092375 (accessed on 30 September 2021).
- Wittenbaum, G.M.; Moreland, R.L. Small-Group Research in Social Psychology: Topics and Trends over Time. Soc. Personal. Psychol. Compass 2008, 2, 187–203. [Google Scholar] [CrossRef]
- Levine, J.M.; Moreland, R.L. Progress in small group research. Annu. Rev. Psychol. 1990, 41, 585–634. [Google Scholar] [CrossRef]
- Levine, J.M.; Moreland, R.L. Small Groups: An Overview. Key Readings Soc. Psychol. Press. 1998. Available online: https://psycnet.apa.org/record/2006-12496-001 (accessed on 30 September 2021).
- Moreland, R.L.; Hogg, M.A.; Hains, S.C. Back to the future: Social psychological research on groups. J. Exp. Soc. Psychol. 1994, 30, 527–555. [Google Scholar] [CrossRef]
- Jung, M.; Hinds, P. Robots in the Wild: A Time for More Robust Theories of Human-Robot Interaction. ACM Trans. Hum.-Robot Interact. 2018, 7, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Shen, S.; Slovak, P.; Jung, M.F. “Stop. I See a Conflict Happening.” A Robot Mediator for Young Children’s Interpersonal Conflict Resolution. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 69–77. [Google Scholar]
- Jung, M.F.; Martelaro, N.; Hinds, P.J. Using robots to moderate team conflict: The case of repairing violations. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 229–236. [Google Scholar]
- Short, E.; Mataric, M.J. Robot moderation of a collaborative game: Towards socially assistive robotics in group interactions. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 385–390. [Google Scholar]
- Chang, W.L.; White, J.P.; Park, J.; Holm, A.; Šabanović, S. The effect of group size on people’s attitudes and cooperative behaviors toward robots in interactive gameplay. In Proceedings of the 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 845–850. [Google Scholar]
- Fraune, M.R.; Sherrin, S.; Sabanović, S.; Smith, E.R. Rabble of robots effects: Number and type of robots modulates attitudes, emotions, and stereotypes. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 109–116. [Google Scholar]
- Fraune, M.R.; Oisted, B.C.; Sembrowski, C.E.; Gates, K.A.; Krupp, M.M.; Šabanović, S. Effects of robot-human versus robot-robot behavior and entitativity on anthropomorphism and willingness to interact. Comput. Hum. Behav. 2020, 105, 106220. [Google Scholar] [CrossRef]
- Gockley, R.; Forlizzi, J.; Simmons, R. Interactions with a moody robot. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UA, USA, 2–3 March 2006; pp. 186–193. [Google Scholar]
- Booth, S.; Tompkin, J.; Pfister, H.; Waldo, J.; Gajos, K.; Nagpal, R. Piggybacking robots: human-robot overtrust in university dormitory security. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 426–434. [Google Scholar]
- Kim, E.S.; Berkovits, L.D.; Bernier, E.P.; Leyzberg, D.; Shic, F.; Paul, R.; Scassellati, B. Social robots as embedded reinforcers of social behavior in children with autism. J. Autism Dev. Disord. 2013, 43, 1038–1049. [Google Scholar] [CrossRef] [PubMed]
- Zubrycki, I.; Granosik, G. Understanding therapists’ needs and attitudes towards robotic support. The roboterapia project. Int. J. Soc. Robot. 2016, 8, 553–563. [Google Scholar] [CrossRef] [Green Version]
- Scassellati, B.; Boccanfuso, L.; Huang, C.M.; Mademtzi, M.; Qin, M.; Salomons, N.; Ventola, P.; Shic, F. Improving social skills in children with ASD using a long-term, in-home social robot. Sci. Robot. 2018, 3. [Google Scholar] [CrossRef] [Green Version]
- Strohkorb Sebo, S.; Traeger, M.; Jung, M.; Scassellati, B. The ripple effects of vulnerability: The effects of a robot’s vulnerable behavior on trust in human-robot teams. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 178–186. [Google Scholar]
- Fraune, M.R.; Šabanović, S.; Smith, E.R. Teammates first: Favoring ingroup robots over outgroup humans. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017 2017; pp. 1432–1437. [Google Scholar]
- Fraune, M.R.; Šabanović, S.; Smith, E.R. Some are more equal than others: Ingroup robots gain some but not all benefits of team membership. Interact. Stud. 2020, 21, 303–328. [Google Scholar] [CrossRef]
- Sebo, S.; Dong, L.L.; Chang, N.; Lewkowicz, M.; Schutzman, M.; Scassellati, B. The Influence of Robot Verbal Support on Human Team Members: Encouraging Outgroup Contributions and Suppressing Ingroup Supportive Behavior. Front. Psychol. 2020, 11, 3584. [Google Scholar] [CrossRef]
- Oliveira, R.; Arriaga, P.; Alves-Oliveira, P.; Correia, F.; Petisca, S.; Paiva, A. Friends or Foes?: Socioemotional Support and Gaze Behaviors in Mixed Groups of Humans and Robots. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 279–288. [Google Scholar]
- Marques, J.M.; Yzerbyt, V.Y.; Leyens, J.P. The “black sheep effect”: Extremity of judgments towards ingroup members as a function of group identification. Eur. J. Soc. Psychol. 1988, 18, 1–16. [Google Scholar] [CrossRef]
- Pinto, I.R.; Marques, J.M.; Levine, J.M.; Abrams, D. Membership status and subjective group dynamics: Who triggers the black sheep effect? J. Personal. Soc. Psychol. 2010, 99, 107. [Google Scholar] [CrossRef] [PubMed]
- Steain, A.; Stanton, C.J.; Stevens, C.J. The black sheep effect: The case of the deviant ingroup robot. PLoS ONE 2019, 14, e0222975. [Google Scholar] [CrossRef]
- Bales, R.F. Interaction Process Analysis. 1950. Available online: https://psycnet.apa.org/record/1950-04553-000 (accessed on 30 September 2021).
- Oliveira, R.; Arriaga, P.; Santos, F.P.; Mascarenhas, S.; Paiva, A. Towards prosocial design: A scoping review of the use of robots and virtual agents to trigger prosocial behaviour. Comput. Hum. Behav. 2020, 114, 106547. [Google Scholar] [CrossRef]
- De Visser, E.J.; Peeters, M.M.; Jung, M.F.; Kohn, S.; Shaw, T.H.; Pak, R.; Neerincx, M.A. Towards a theory of longitudinal trust calibration in human-robot teams. Int. J. Soc. Robot. 2020, 12, 459–478. [Google Scholar] [CrossRef]
- Groom, V.; Nass, C. Can robots be teammates?: Benchmarks in human-robot teams. Interact. Stud. 2007, 8, 483–500. [Google Scholar] [CrossRef]
- Fong, T.; Kunz, C.; Hiatt, L.M.; Bugajska, M. The human-robot interaction operating system. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006; pp. 41–48. [Google Scholar]
- Kannan, B.; Parker, L.E. Fault-tolerance based metrics for evaluating system performance in multi-robot teams. In Proceedings of the Performance Metrics for Intelligent Systems Workshop, Gaithersburg, MD, USA, 14–16 August 2006. [Google Scholar]
- Balakirsky, S.; Scrapper, C.; Carpin, S.; Lewis, M. USARSim: Providing a framework for multi-robot performance evaluation. In Proceedings of the PerMIS; 2006. Available online: https://www.nist.gov/publications/usarsim-providing-framework-multi-robot-performance-evaluation (accessed on 30 September 2021).
- Pina, P.; Cummings, M.; Crandall, J.; Della Penna, M. Identifying generalizable metric classes to evaluate human-robot teams. In Proceedings of the 3rd ACM/IEEE International Conference on Human Robot Interaction, HRI 2008, Amsterdam, The Netherlands, 12–15 March 2008; pp. 13–20. [Google Scholar]
- Burke, J.; Lineberry, M.; Pratt, K.S.; Taing, M.; Murphy, R.; Day, B. Toward developing hri metrics for teams: Pilot testing in the field. In Proceedings of the 3rd ACM/IEEE International Conference on Human Robot Interaction, HRI 2008, Amsterdam, The Netherlands, 12–15 March 2008; p. 21. [Google Scholar]
- Carpinella, C.M.; Wyman, A.B.; Perez, M.A.; Stroessner, S.J. The robotic social attributes scale (rosas): Development and validation. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 254–262. [Google Scholar]
- Weiss, A.; Bartneck, C. Meta analysis of the usage of the Godspeed Questionnaire Series. In Proceedings of the 2015 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Kobe, Japan, 31 August–4 September 2015; pp. 381–388. [Google Scholar]
- Stangor, C. Social Groups in Action and Interaction. 2015. Available online: https://www.routledge.com/Social-Groups-in-Action-and-Interaction-2nd-Edition/Stangor/p/book/9781848726925 (accessed on 30 September 2021).
- Keyton, J. The future of small group research. Small Group Res. 2016, 47, 134–154. [Google Scholar] [CrossRef]
- Furr, R.; Bacharach, V. Psychometrics and the importance of psychological measurement. In Psychometrics; Sage Publications Inc.: Thousand Oaks, CA, USA, 2008. [Google Scholar]
- Piçarra, N.; Giger, J.C.; Pochwatko, G.; Gonçalves, G. Validation of the Portuguese version of the Negative Attitudes towards Robots Scale. Eur. Rev. Appl. Psychol. 2015, 65, 93–104. [Google Scholar] [CrossRef]
- Miyazaki, A.D.; Taylor, K.A. Researcher interaction biases and business ethics research: Respondent reactions to researcher characteristics. J. Bus. Ethics 2008, 81, 779–795. [Google Scholar] [CrossRef]
- Smedegaard, C.V. Reframing the role of novelty within social HRI: From noise to information. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 411–420. [Google Scholar]
- Vogt, P.; van den Berghe, R.; de Haas, M.; Hoffman, L.; Kanero, J.; Mamus, E.; Montanier, J.M.; Oranç, C.; Oudgenoeg-Paz, O.; García, D.H.; et al. Second language tutoring using social robots: A large-scale study. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 497–505. [Google Scholar]
- De Graaf, M.M.; Allouch, S.B. Exploring influencing variables for the acceptance of social robots. Robot. Auton. Syst. 2013, 61, 1476–1486. [Google Scholar] [CrossRef]
- Hameed, I.A.; Tan, Z.H.; Thomsen, N.B.; Duan, X. User acceptance of social robots. In Proceedings of the Ninth International Conference on Advances in Computer-Human Interactions (ACHI 2016), Venice, Italy, 24–28 April 2016; pp. 274–279. [Google Scholar]
- Naneva, S.; Sarda Gou, M.; Webb, T.L.; Prescott, T.J. A systematic review of attitudes, anxiety, acceptance, and trust towards social robots. Int. J. Soc. Robot. 2020, 12, 1179–1201. [Google Scholar] [CrossRef]
- Denzin, N.K. Triangulation 2.0. J. Mixed Methods Res. 2012, 6, 80–88. [Google Scholar] [CrossRef]
- Kawamura, K.; Pack, R.T.; Bishay, M.; Iskarous, M. Design philosophy for service robots. Robot. Auton. Syst. 1996, 18, 109–116. [Google Scholar] [CrossRef]
- Bonani, M.; Oliveira, R.; Correia, F.; Rodrigues, A.; Guerreiro, T.; Paiva, A. What My Eyes Ca not See, A Robot Can Show Me: Exploring the Collaboration Between Blind People and Robots. In Proceedings of the 20th International ACM SIGACCESS Conference on Computers and Accessibility, Galway, Ireland, 22–24 October 2018; pp. 15–27. [Google Scholar]
- Allport, F.H. The group fallacy in relation to social science. Am. J. Sociol. 1924, 29, 688–706. [Google Scholar] [CrossRef]
- Morgan, D.L. Focus Groups as Qualitative Research; Sage Publications: London, UK, 1996; Volume 16. [Google Scholar]
- Bolger, N.; Davis, A.; Rafaeli, E. Diary methods: Capturing life as it is lived. Annu. Rev. Psychol. 2003, 54, 579–616. [Google Scholar] [CrossRef] [Green Version]
- Gunthert, K.C.; Wenze, S.J. Handbook of Research Methods for Studying Daily Life; Guilford Press: New York, NY, USA, 2012. [Google Scholar]
- Cucu Oancea, O. Using diaries-a real challenge for the social scientist. Soc. Behav. Sci. 2013, 92, 231–238. [Google Scholar] [CrossRef] [Green Version]
- Williamson, C. Questionnaires, individual interviews and focus groups. In Research Methods: Information, Systems, and Contexts; Tilde University Press: Melbourne, Australia, 2013; pp. 349–372. [Google Scholar]
- Patten, M. Questionnaire Research: A Practical Guide. 2016. Available online: https://www.routledge.com/Questionnaire-Research-A-Practical-Guide/Patten/p/book/9781936523313 (accessed on 30 September 2021).
- Oliveira, R.; Arriaga, P.; Correia, F.; Paiva, A. The stereotype content model applied to human-robot interactions in groups. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 123–132. [Google Scholar]
- Jones, S.; Murphy, F.; Edwards, M.; James, J. Doing things differently: Advantages and disadvantages of web questionnaires. Nurse Res. 2008, 15, 15–26. [Google Scholar] [CrossRef] [PubMed]
- Mansell, I.; Bennett, G.; Northway, R.; Mead, D.; Moseley, L. The learning curve: The advantages and disadvantages in the use of focus groups as a method of data collection. Nurse Res. 2004, 11, 79–88. [Google Scholar] [CrossRef] [PubMed]
- Winkle, K.; Caleb-Solly, P.; Turton, A.; Bremner, P. Social robots for engagement in rehabilitative therapies: Design implications from a study with therapists. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 289–297. [Google Scholar]
- Acocella, I. The focus groups in social research: Advantages and disadvantages. Qual. Quant. 2012, 46, 1125–1136. [Google Scholar] [CrossRef]
- Corti, L. Using Diaries in Social Research. 1993. Available online: https://uk.sagepub.com/en-gb/eur/using-diaries-for-social-research/book219185 (accessed on 30 September 2021).
- Day, M.; Thatcher, J. “I’m really embarrassed that you’re going to read this…”: Reflections on using diaries in qualitative research. Qual. Res. Psychol. 2009, 6, 249–259. [Google Scholar] [CrossRef]
- Frennert, S.; Eftring, H.; Östlund, B. Case report: Implications of doing research on socially assistive robots in real homes. Int. J. Soc. Robot. 2017, 9, 401–415. [Google Scholar] [CrossRef] [Green Version]
- Snowden, M. Use of diaries in research. Nurs. Stand. (2014+) 2015, 29, 36. [Google Scholar] [CrossRef]
- Opdenakker, R. Advantages and disadvantages of four interview techniques in qualitative research. In Forum Qualitative Sozialforschung/Forum: Qualitative Social Research; 2006; Volume 7, Available online: https://www.qualitative-research.net/index.php/fqs (accessed on 30 September 2021).
- Hannabuss, S. Research interviews. New Library World 1996, 97, 9. [Google Scholar] [CrossRef]
- Mann, C. Observational research methods. Research design II: Cohort, cross sectional, and case-control studies. Emerg. Med. J. 2003, 20, 54–60. [Google Scholar] [CrossRef]
- Lindahl, K.M. Methodological issues in family observational research. In Family Observational Coding Systems; Psychology Press: Hove, UK, 2000; pp. 39–48. Available online: https://www.taylorfrancis.com/chapters/edit/10.4324/9781410605610-7/methodological-issues-family-observational-research-kristin-lindahl (accessed on 30 September 2021).
- Foster, P. Observational research. In Data Collection and Analysis; 1996; pp. 57–93. Available online: https://methods.sagepub.com/book/data-collection-and-analysis/n3.xml (accessed on 30 September 2021).
- Lohani, M.; Payne, B.R.; Strayer, D.L. A review of psychophysiological measures to assess cognitive states in real-world driving. Front. Hum. Neurosci. 2019, 13, 57. [Google Scholar] [CrossRef]
- Rani, P.; Sarkar, N.; Smith, C.A.; Kirby, L.D. Anxiety detecting robotic system–towards implicit human-robot collaboration. Robotica 2004, 22, 85–95. [Google Scholar] [CrossRef]
- Schmidt, E.A.; Schrauf, M.; Simon, M.; Fritzsche, M.; Buchner, A.; Kincses, W.E. Drivers’ misjudgement of vigilance state during prolonged monotonous daytime driving. Accid. Anal. Prev. 2009, 41, 1087–1093. [Google Scholar] [CrossRef] [PubMed]
- Mauss, I.B.; Robinson, M.D. Measures of emotion: A review. Cogn. Emot. 2009, 23, 209–237. [Google Scholar] [CrossRef] [PubMed]
- Willemse, C.J.; van Erp, J.B. Social Touch in human-robot Interaction: Robot-Initiated Touches can Induce Positive Responses without Extensive Prior Bonding. Int. J. Soc. Robot. 2018, 11, 285–304. [Google Scholar] [CrossRef] [Green Version]
- Michaud, K.; Matheson, K.; Kelly, O.; Anisman, H. Impact of stressors in a natural context on release of cortisol in healthy adult humans: A meta-analysis. Stress 2008, 11, 177–197. [Google Scholar] [CrossRef] [PubMed]
- Book, A.S.; Starzyk, K.B.; Quinsey, V.L. The relationship between testosterone and aggression: A meta-analysis. Aggress. Violent Behav. 2001, 6, 579–599. [Google Scholar] [CrossRef]
- Mazur, A.; Booth, A. Testosterone and dominance in men. Behav. Brain Sci. 1998, 21, 353–363. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- MacDonald, K.; MacDonald, T.M. The peptide that binds: A systematic review of oxytocin and its prosocial effects in humans. Harv. Rev. Psychiatry 2010, 18, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Heinrichs, M.; Baumgartner, T.; Kirschbaum, C.; Ehlert, U. Social support and oxytocin interact to suppress cortisol and subjective responses to psychosocial stress. Biol. Psychiatry 2003, 54, 1389–1398. [Google Scholar] [CrossRef]
- Schultheiss, O.C.; Stanton, S.J. Assessment of salivary hormones. Methods Soc. Neurosci. 2009, 17, 17–44. [Google Scholar]
- Schaefer, K.E. Measuring trust in human robot interactions: Development of the “trust perception scale-HRI”. In Robust Intelligence and Trust in Autonomous Systems; Springer: Berlin/Heidelberg, Germany, 2016; pp. 191–218. [Google Scholar]
- Salem, M.; Dautenhahn, K. Evaluating trust and safety in HRI: Practical issues and ethical challenges. In Emerging Policy and Ethics of Human-Robot Interaction; ACM Press: New York, NY, USA, 2015. [Google Scholar]
- Yagoda, R.E.; Gillan, D.J. You want me to trust a ROBOT? The development of a human-robot interaction trust scale. Int. J. Soc. Robot. 2012, 4, 235–248. [Google Scholar] [CrossRef]
- Staudte, M.; Crocker, M.W. Visual attention in spoken human-robot interaction. In Proceedings of the 2009 4th ACM/IEEE International Conference on Human-Robot Interaction (HRI), La Jolla, CA, USA, 9–13 March 2009; pp. 77–84. [Google Scholar]
- Palinko, O.; Rea, F.; Sandini, G.; Sciutti, A. Robot reading human gaze: Why eye tracking is better than head tracking for human-robot collaboration. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5048–5054. [Google Scholar]
- Fraune, M.R.; Šabanović, S.; Kanda, T. Human group presence, group characteristics, and group norms affect human-robot interaction in naturalistic settings. Front. Robot. AI 2019, 6, 48. [Google Scholar] [CrossRef] [Green Version]
- Stemmler, G. Methodological Considerations in the Psychophysiological Study of Emotion; Oxford University Press: Oxford, UK, 2003. [Google Scholar]
- Landowska, A.; Miler, J. Limitations of emotion recognition in software user experience evaluation context. In Proceedings of the 2016 Federated Conference on Computer Science and Information Systems (FedCSIS), Gdańsk, Poland, 11–14 September 2016; pp. 1631–1640. [Google Scholar]
- Landowska, A.; Brodny, G.; Wrobel, M.R. Limitations of Emotion Recognition from Facial Expressions in e-Learning Context. In CSEDU (2); 2017; pp. 383–389. Available online: https://www.scitepress.org/Papers/2017/63579/63579.pdf (accessed on 30 September 2021).
- Kołakowska, A.; Landowska, A.; Szwoch, M.; Szwoch, W.; Wrobel, M.R. Emotion recognition and its applications. In Human–Computer Systems Interaction: Backgrounds and Applications 3; Springer: Berlin/Heidelberg, Germany, 2014; pp. 51–62. [Google Scholar]
- Tscherepanow, M.; Hillebrand, M.; Hegel, F.; Wrede, B.; Kummert, F. Direct imitation of human facial expressions by a user-interface robot. In Proceedings of the 2009 9th IEEE-RAS International Conference on Humanoid Robots, Paris, France, 7–10 December 2009; pp. 154–160. [Google Scholar]
- Scheutz, M.; Schermerhorn, P.; Kramer, J. The utility of affect expression in natural language interactions in joint human-robot tasks. In Proceedings of the 1st ACM SIGCHI/SIGART conference on human-robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006; pp. 226–233. [Google Scholar]
- McColl, D.; Hong, A.; Hatakeyama, N.; Nejat, G.; Benhabib, B. A survey of autonomous human affect detection methods for social robots engaged in natural HRI. J. Intell. Robot. Syst. 2016, 82, 101–133. [Google Scholar] [CrossRef]
- Busso, C.; Deng, Z.; Yildirim, S.; Bulut, M.; Lee, C.M.; Kazemzadeh, A.; Lee, S.; Neumann, U.; Narayanan, S. Analysis of emotion recognition using facial expressions, speech and multimodal information. In Proceedings of the 6th International Conference on Multimodal Interfaces, State College, PA, USA, 13–15 October 2004; pp. 205–211. [Google Scholar]
- Gaspar, A.; Esteves, F.; Arriaga, P. On prototypical facial expressions versus variation in facial behavior: What have we learned on the “visibility” of emotions from measuring facial actions in humans and apes. In The Evolution of Social Communication in Primates; Springer: Berlin/Heidelberg, Germany, 2014; pp. 101–126. [Google Scholar]
- Fairbairn, C.E. A nested frailty survival approach for analyzing small group behavioral observation data. Small Group Res. 2016, 47, 303–332. [Google Scholar] [CrossRef]
- Janis, R.A.; Burlingame, G.M.; Olsen, J.A. Evaluating factor structures of measures in group research: Looking between and within. Group Dyn. Theory Res. Pract. 2016, 20, 165. [Google Scholar] [CrossRef]
- Krull, J.L.; MacKinnon, D.P. Multilevel modeling of individual and group level mediated effects. Multivar. Behav. Res. 2001, 36, 249–277. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kenny, D.A.; Mannetti, L.; Pierro, A.; Livi, S.; Kashy, D.A. The statistical analysis of data from small groups. J. Personal. Soc. Psychol. 2002, 83, 126. [Google Scholar] [CrossRef]
- Grawitch, M.J.; Munz, D.C. Are your data nonindependent? A practical guide to evaluating nonindependence and within-group agreement. Underst. Stat. 2004, 3, 231–257. [Google Scholar] [CrossRef]
- Pavitt, C. An interactive input–process–output model of social influence in decision-making groups. Small Group Res. 2014, 45, 704–730. [Google Scholar] [CrossRef]
- Mullen, B.; Goethals, G.R. Theories of Group Behavior; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Poole, M.S.; Hollingshead, A.B.; McGrath, J.E.; Moreland, R.L.; Rohrbaugh, J. Interdisciplinary perspectives on small groups. Small Group Res. 2004, 35, 3–16. [Google Scholar] [CrossRef]
- Asch, S.E. Effects of group pressure upon the modification and distortion of judgments. In Documents of Gestalt Psychology; University of California Press: Berkeley, CA, USA, 1961; pp. 222–236. [Google Scholar]
- Brandstetter, J.; Rácz, P.; Beckner, C.; Sandoval, E.B.; Hay, J.; Bartneck, C. A peer pressure experiment: Recreation of the Asch conformity experiment with robots. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1335–1340. [Google Scholar]
- Tajfel, H. Social Identity and Intergroup Relations; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Lovaglia, M.; Mannix, E.A.; Samuelson, C.D.; Sell, J.; Wilson, R.K. Conflict, Power, and Status in Groups. In Theories of Small Groups: Interdisciplinary Perspectives; 2005; pp. 139–184. Available online: https://sk.sagepub.com/books/theories-of-small-groups (accessed on 20 December 2013).
- Wittenbaum, G.M.; Hollingshead, A.B.; Paulus, P.B.; Hirokawa, R.Y.; Ancona, D.G.; Peterson, R.S.; Jehn, K.A.; Yoon, K. The functional perspective as a lens for understanding groups. Small Group Res. 2004, 35, 17–43. [Google Scholar] [CrossRef]
- Nosek, B.A.; Ebersole, C.R.; DeHaven, A.C.; Mellor, D.T. The preregistration revolution. Proc. Natl. Acad. Sci. USA 2018, 115, 2600–2606. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nosek, B.A.; Beck, E.D.; Campbell, L.; Flake, J.K.; Hardwicke, T.E.; Mellor, D.T.; van’t Veer, A.E.; Vazire, S. Preregistration is hard, and worthwhile. Trends Cogn. Sci. 2019, 23, 815–818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Simes, R.J. Publication bias: The case for an international registry of clinical trials. J. Clin. Oncol. 1986, 4, 1529–1541. [Google Scholar] [CrossRef] [PubMed]
- va not Veer, A.E.; Giner-Sorolla, R. Pre-registration in social psychology—A discussion and suggested template. J. Exp. Soc. Psychol. 2016, 67, 2–12. [Google Scholar] [CrossRef]
- Begley, C.G.; Ellis, L.M. Raise standards for preclinical cancer research. Nature 2012, 483, 531–533. [Google Scholar] [CrossRef] [PubMed]
- Prinz, F.; Schlange, T.; Asadullah, K. Believe it or not: How much can we rely on published data on potential drug targets? Nat. Rev. Drug Discov. 2011, 10, 712. [Google Scholar] [CrossRef] [Green Version]
- Hartshorne, J.; Schachner, A. Tracking replicability as a method of post-publication open evaluation. Front. Comput. Neurosci. 2012, 6, 8. [Google Scholar] [CrossRef] [Green Version]
- Wager, T.D.; Lindquist, M.A.; Nichols, T.E.; Kober, H.; Van Snellenberg, J.X. Evaluating the consistency and specificity of neuroimaging data using meta-analysis. Neuroimage 2009, 45, S210–S221. [Google Scholar] [CrossRef] [Green Version]
- Collaboration, O.S. An open, large-scale, collaborative effort to estimate the reproducibility of psychological science. Perspect. Psychol. Sci. 2012, 7, 657–660. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bartneck, C.; Suzuki, T.; Kanda, T.; Nomura, T. The influence of people’s culture and prior experiences with Aibo on their attitude towards robots. Ai Soc. 2007, 21, 217–230. [Google Scholar] [CrossRef]
- Gnambs, T.; Appel, M. Are robots becoming unpopular? Changes in attitudes towards autonomous robotic systems in Europe. Comput. Hum. Behav. 2019, 93, 53–61. [Google Scholar] [CrossRef] [Green Version]
- Fox, N.; Hunn, A.; Mathers, N. Sampling and sample size calculation. In East Midlands/Yorkshire: The National Institutes for Health Research. Research Design Service for the East Midlands/Yorkshire & the Humber; 2009; Available online: https://www.semanticscholar.org/paper/Sampling-and-Sample-Size-Calculation-Fox-Hunn/ae57ab527da5287ed215a9a3bf5f542ae19734ea (accessed on 30 September 2021).
- Faul, F.; Erdfelder, E.; Buchner, A.; Lang, A.G. Statistical power analyses using G* Power 3.1: Tests for correlation and regression analyses. Behav. Res. Methods 2009, 41, 1149–1160. [Google Scholar] [CrossRef] [Green Version]
- YENİPINAR, A.; Şeyma, K.; ÇANGA, D.; Fahrettin, K. Determining sample size in logistic regression with G-Power. Black Sea J. Eng. Sci. 2019, 2, 16–22. [Google Scholar]
- Bujang, M.A.; Sa’at, N.; Bakar, T.M.I.T.A. Sample size guidelines for logistic regression from observational studies with large population: Emphasis on the accuracy between statistics and parameters based on real life clinical data. Malays. J. Med. Sci. MJMS 2018, 25, 122. [Google Scholar] [CrossRef]
- Bujang, M.A.; Baharum, N. Guidelines of the minimum sample size requirements for Kappa agreement test. Epidemiol. Biostat. Public Health 2017, 14, 2. [Google Scholar]
- Vasileiou, K.; Barnett, J.; Thorpe, S.; Young, T. Characterising and justifying sample size sufficiency in interview-based studies: Systematic analysis of qualitative health research over a 15-year period. BMC Med. Res. Methodol. 2018, 18, 148. [Google Scholar] [CrossRef] [Green Version]
- Schoemann, A.M.; Boulton, A.J.; Short, S.D. Determining power and sample size for simple and complex mediation models. Soc. Psychol. Personal. Sci. 2017, 8, 379–386. [Google Scholar] [CrossRef]
- Hox, J.J.; Maas, C.J.; Brinkhuis, M.J. The effect of estimation method and sample size in multilevel structural equation modeling. Stat. Neerl. 2010, 64, 157–170. [Google Scholar] [CrossRef]
- Lane, S.P.; Hennes, E.P. Power struggles: Estimating sample size for multilevel relationships research. J. Soc. Pers. Relatsh. 2018, 35, 7–31. [Google Scholar] [CrossRef] [Green Version]
- Aylett, R. Games Robots Play: Once More, with Feeling. In Emotion in Games; Springer: Berlin/Heidelberg, Germany, 2016; pp. 289–302. [Google Scholar]
- Leite, I.; Martinho, C.; Pereira, A.; Paiva, A. As time goes by: Long-term evaluation of social presence in robotic companions. In Proceedings of the RO-MAN 2009-The 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 669–674. [Google Scholar]
- Hare, A.P. Handbook of Small Group Research. 1976. Available online: https://books.google.com.hk/books/about/Handbook_of_Small_Group_Research.html?id=LRZHAAAAMAAJ&redir_esc=y (accessed on 30 September 2021).
- Hansen, H.; Trank, C.Q. This is going to hurt: Compassionate research methods. Organ. Res. Methods 2016, 19, 352–375. [Google Scholar] [CrossRef]
- Levine, J.M.; Moreland, R.L. Group socialization: Theory and research. Eur. Rev. Soc. Psychol. 1994, 5, 305–336. [Google Scholar] [CrossRef]
- Parker, S.K.; Wall, T.D.; Cordery, J.L. Future work design research and practice: Towards an elaborated model of work design. J. Occup. Organ. Psychol. 2001, 74, 413–440. [Google Scholar] [CrossRef] [Green Version]





| Transversal Concerns | Importance for HRI Research | Main Challenges |
|---|---|---|
| Interdisciplinarity | -Research on human psychology and other social sciences can be a good starting point for research in HRI; | -Communication between academics of different fields can difficult; |
| -Research methods common in social sciences can be used to improve HRI research; | -Collaborations might be hard to establish due to a lack of network opportunities with academics from other fields. | |
| -It offers new sources of insight and new perspectives that can be beneficial to the development of social robots. | ||
| Pre-registration | -Increases the transparency, rigor and reproducibility of research; | -Requires a substantial amount of time to be dedicated to the planning and study preparation process; |
| Reduces bias and opportunities for dysfunctional research practices; | ||
| -Puts an emphasis on the careful planning of important aspects (e.g., data collection methods, sample size estimation) of research studies; | ||
| Pre-registered reports that are subject to peer-review can increase the likelihood of the publication of negative or null results. | ||
| Longitudinal research | -Presents an opportunity to better understand how group HRI develops over time; | -Can be costly to implement and monitor, both in terms of time and money; |
| -Large-scale longitudinal studies “in-the-wild” offer useful insight on how to better develop social robots suited for this type of interactions. | -It might be difficult to keep participants engaged in the research process for such lengths of time. | |
| Compassionate research | -Contributes to the development of better social robots by focusing on the needs of prospective users; | -It can be difficult to reach and conduct research with some groups of users; |
| It can increase the societal value of social robots by making them more valuable and useful to users. | -Users’ needs and expectations of social robots can vary widely across culture and demographics. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oliveira, R.; Arriaga, P.; Paiva, A. Human-Robot Interaction in Groups: Methodological and Research Practices. Multimodal Technol. Interact. 2021, 5, 59. https://doi.org/10.3390/mti5100059
Oliveira R, Arriaga P, Paiva A. Human-Robot Interaction in Groups: Methodological and Research Practices. Multimodal Technologies and Interaction. 2021; 5(10):59. https://doi.org/10.3390/mti5100059
Chicago/Turabian StyleOliveira, Raquel, Patrícia Arriaga, and Ana Paiva. 2021. "Human-Robot Interaction in Groups: Methodological and Research Practices" Multimodal Technologies and Interaction 5, no. 10: 59. https://doi.org/10.3390/mti5100059
APA StyleOliveira, R., Arriaga, P., & Paiva, A. (2021). Human-Robot Interaction in Groups: Methodological and Research Practices. Multimodal Technologies and Interaction, 5(10), 59. https://doi.org/10.3390/mti5100059