
Towards a Design Space of Haptics in Everyday Virtual Reality across Different Spatial Scales



Abstract
:1. Introduction
2. Definition and Concepts of Haptics in Virtual Environments
2.1. Human Haptics
2.2. Haptic Displays
3. Literature Review Methodology
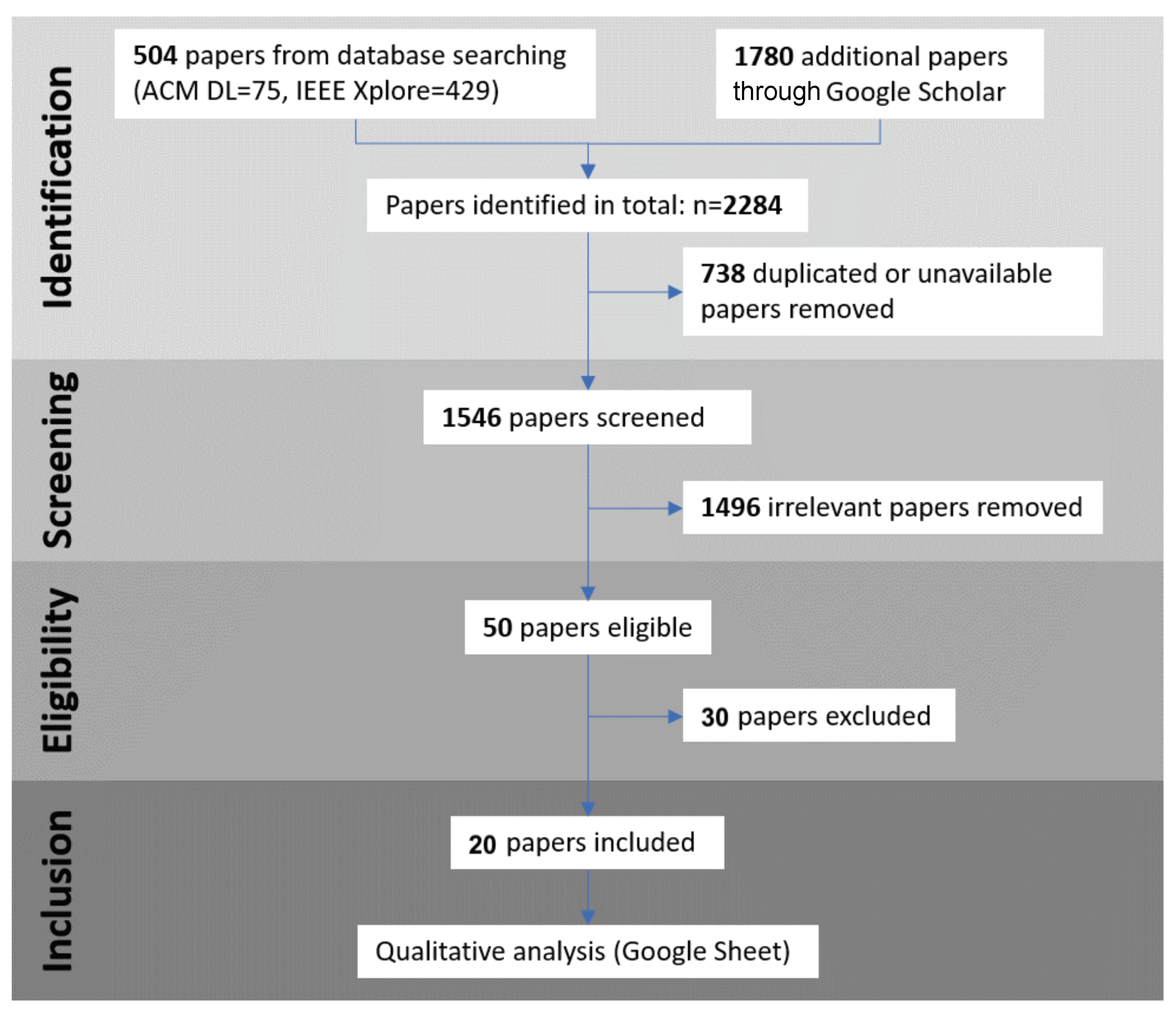
3.1. Identification and Screening
3.2. Eligibility and Inclusion
- No keyword in the abstract (minimum of one keyword in the full text);
- One keyword in the abstract and one of the other keywords in the text or the solution introduced in the paper is applicable for one or both of the other keywords;
- Two keywords in the abstract;
- Two keywords in the abstract and the third keyword in the text or the solution introduced in the paper is applicable to the third keyword;
- Three keywords all in the abstract.
3.3. Limitations of the Study Regarding Scope and Detail
4. Results of the Literature Review
4.1. Haptics Type and Haptic Display
4.2. Real Environment Scales and Application Scenarios
4.3. Evaluation of System Performance and User Perception
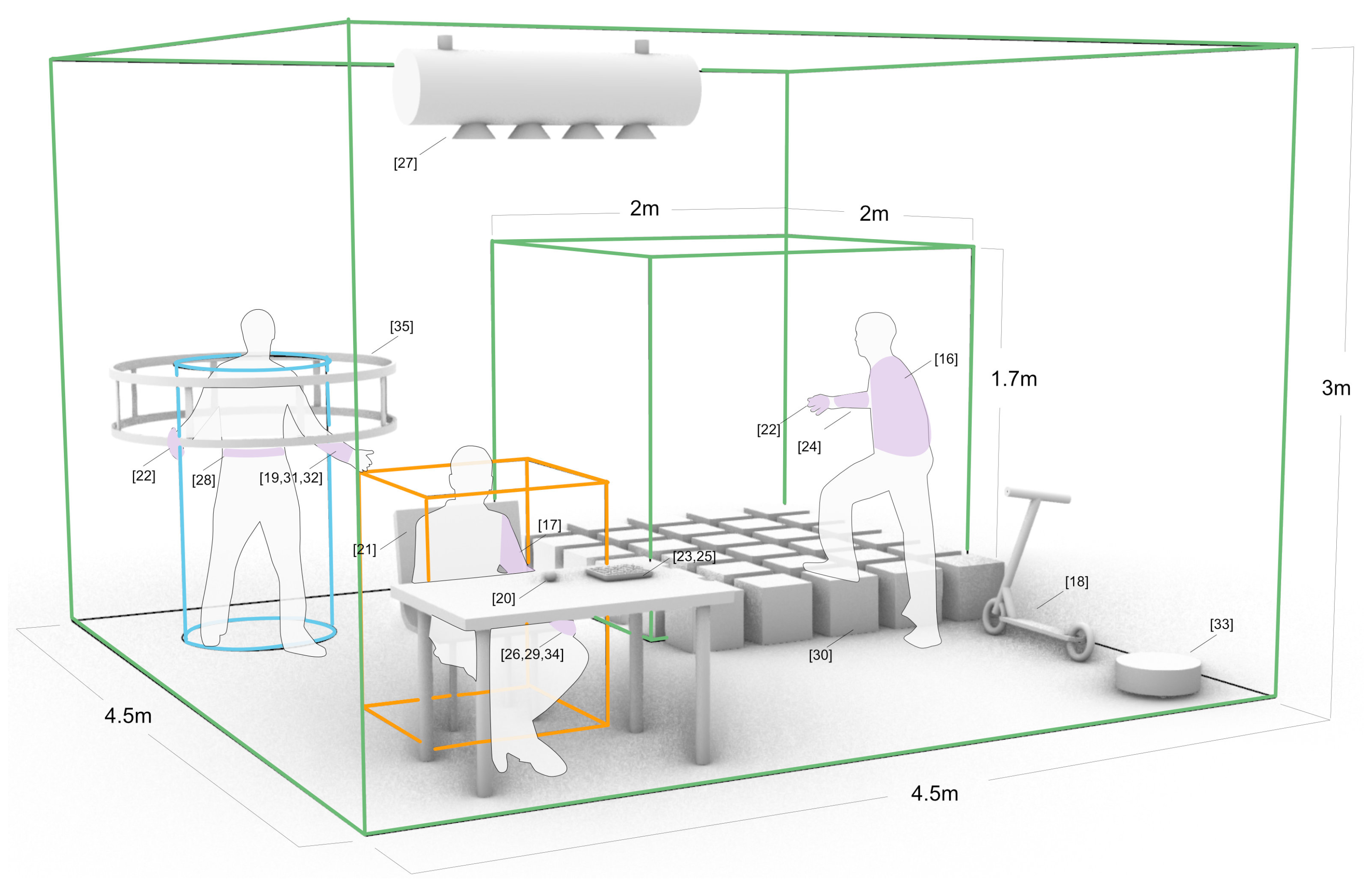
5. A Design Space for Everyday Haptic VR
5.1. A Spatial Design Space
5.2. Usage of the Design Space
5.2.1. Domestic VR—Household VR Gym
5.2.2. Mobile VR—Passenger VR Relaxation
5.3. Proposed Design Strategies
5.3.1. Single RE Scale
5.3.2. Hybrid RE Scales
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sensorama Simulator (1962). Available online: http://www.freepatentsonline.com/3050870.html (accessed on 30 April 2021).
- Sutherland, I.E. A head-mounted three dimensional display. In Proceedings of the Fall Joint Computer Conference, Part I, San Francisco, CA, USA, 9–11 December 1968; pp. 757–764. [Google Scholar]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable haptic systems for the fingertip and the hand: Taxonomy, review, and perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Whitmire, E.; Benko, H.; Holz, C.; Ofek, E.; Sinclair, M. Haptic Revolver: Touch, Shear, Texture, and Shape Rendering on a Reconfigurable Virtual Reality Controller. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montréal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar] [CrossRef]
- Nilsson, N.C.; Serafin, S.; Steinicke, F.; Nordahl, R. Natural Walking in Virtual Reality: A Review. Comput. Entertain. 2018, 16, 1–22. [Google Scholar] [CrossRef]
- Kohli, L.; Whitton, M.C.; Brooks, F.P. Redirected touching: The effect of warping space on task performance. In Proceedings of the 2012 IEEE Symposium on 3D User Interfaces (3DUI), Costa Mesa, CA, USA, 4–5 March 2012; pp. 105–112. [Google Scholar] [CrossRef]
- Srinivasan, M.A.; Basdogan, C. Haptics in virtual environments: Taxonomy, research status, and challenges. Comput. Graph. 1997, 21, 393–404. [Google Scholar] [CrossRef]
- Dangxiao, W.; Yuan, G.; Shiyi, L.; Zhang, Y.; Weiliang, X.; Jing, X. Haptic display for virtual reality: Progress and challenges. Virtual Real. Intell. Hardw. 2019, 1, 136–162. [Google Scholar] [CrossRef] [Green Version]
- Brooks, F.P., Jr.; Ouh-Young, M.; Batter, J.J.; Jerome Kilpatrick, P. Project GROPEHaptic displays for scientific visualization. In Proceedings of the 17th Annual Conference on Computer Graphics and Interactive Techniques—SIGGRAPH ‘90, Dallas, TX, USA, 6–10 August 1990; ACM Press: New York, NY, USA, 1990. [Google Scholar] [CrossRef]
- Gonzalez, E.J.; Follmer, S. Investigating the detection of bimanual haptic retargeting in virtual reality. In Proceedings of the 25th ACM Symposium on Virtual Reality Software and Technology, Parramatta, Australia, 12–15 November 2019; pp. 1–5. [Google Scholar]
- Cheng, C.H.; Chang, C.C.; Chen, Y.H.; Lin, Y.L.; Huang, J.Y.; Han, P.H.; Ko, J.C.; Lee, L.C. GravityCup: A liquid-based haptics for simulating dynamic weight in virtual reality. In Proceedings of the 24th ACM Symposium on Virtual Reality Software and Technology, Tokyo, Japan, 28 November–1 December 2018; pp. 1–2. [Google Scholar]
- Wolf, D.; Rogers, K.; Kunder, C.; Rukzio, E. Jumpvr: Jump-based locomotion augmentation for virtual reality. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–12. [Google Scholar]
- Günther, S.; Makhija, M.; Müller, F.; Schön, D.; Mühlhäuser, M.; Funk, M. PneumAct: Pneumatic kinesthetic actuation of body joints in virtual reality environments. In Proceedings of the 2019 on Designing Interactive Systems Conference, San Diego, CA, USA, 23–28 June 2019; pp. 227–240. [Google Scholar]
- Peters, M.D.J.; Godfrey, C.M.; Khalil, H.; McInerney, P.; Parker, D.; Soares, C.B. Guidance for conducting systematic scoping reviews. Int. J. Evid. Based Healthc. 2015, 13, 141–146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. J. Clin. Epidemiol. 2009, 62, e1–e34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lindeman, R.W.; Page, R.; Yanagida, Y.; Sibert, J.L. Towards full-body haptic feedback. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology—VRST ’04, Hong Kong, China, 10–12 November 2004; Lau, R.W.H., Baciu, G., Eds.; ACM Press: New York, NY, USA, 2004; p. 146. [Google Scholar] [CrossRef]
- Kruijff, E.; Schmalstieg, D.; Beckhaus, S. Using neuromuscular electrical stimulation for pseudo-haptic feedback. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology, Limassol, Cyprus, 1–3 November 2006; pp. 316–319. [Google Scholar]
- Deligiannidis, L.; Jacob, R.J. The vr scooter: Wind and tactile feedback improve user performance. In Proceedings of the 3D User Interfaces (3DUI’06), Alexandria, VA, USA, 25–26 March 2006; pp. 143–150. [Google Scholar]
- Tsetserukou, D. FlexTorque, FlexTensor, and HapticEye: Exoskeleton haptic interfaces for augmented interaction. In Proceedings of the 2nd Augmented Human International Conference, Tokyo, Japan, 13 March 2011; pp. 1–2. [Google Scholar]
- Carvalheiro, C.; Nóbrega, R.; da Silva, H.; Rodrigues, R. User Redirection and Direct Haptics in Virtual Environments. In Proceedings of the 2016 ACM on Multimedia Conference—MM ’16, Amsterdam, The Netherlands, 15–19 October 2016; Hanjalic, A., Snoek, C., Worring, M., Bulterman, D., Huet, B., Kelliher, A., Kompatsiaris, Y., Li, J., Eds.; ACM Press: New York, NY, USA, 2016; pp. 1146–1155. [Google Scholar] [CrossRef]
- Israr, A.; Schwemler, Z.; Mars, J.; Krainer, B. VR360HD: A VR360° player with enhanced haptic feedback. In Proceedings of the 22nd ACM Conference on Virtual Reality Software and Technology, Munich, Germany, 2–4 November 2016; pp. 183–186. [Google Scholar]
- Benko, H.; Holz, C.; Sinclair, M.; Ofek, E. Normaltouch and texturetouch: High-fidelity 3d haptic shape rendering on handheld virtual reality controllers. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; pp. 717–728. [Google Scholar]
- Ochiai, Y.; Kumagai, K.; Hoshi, T.; Hasegawa, S.; Hayasaki, Y. Cross-field aerial haptics: Rendering haptic feedback in air with light and acoustic fields. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 3238–3247. [Google Scholar]
- Lopes, P.; You, S.; Cheng, L.P.; Marwecki, S.; Baudisch, P. Providing haptics to walls & heavy objects in virtual reality by means of electrical muscle stimulation. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 1471–1482. [Google Scholar]
- Georgiou, O.; Jeffrey, C.; Chen, Z.; Tong, B.X.; Chan, S.H.; Yang, B.; Harwood, A.; Carter, T. Touchless haptic feedback for VR rhythm games. In Proceedings of the 2018 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Tuebingen/Reutlingen, Germany, 18–22 March 2018; pp. 553–554. [Google Scholar]
- Teng, S.Y.; Kuo, T.S.; Wang, C.; Chiang, C.H.; Huang, D.Y.; Chan, L.; Chen, B.Y. Pupop: Pop-up prop on palm for virtual reality. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology, Berlin, Germany, 14 October 2018; pp. 5–17. [Google Scholar]
- Han, P.H.; Chen, Y.S.; Lee, K.C.; Wang, H.C.; Hsieh, C.E.; Hsiao, J.C.; Chou, C.H.; Hung, Y.P. Haptic around: Multiple tactile sensations for immersive environment and interaction in virtual reality. In Proceedings of the 24th ACM Symposium on Virtual Reality Software and Technology, Tokyo, Japan, 28 November–1 December 2018; pp. 1–10. [Google Scholar]
- Al-Sada, M.; Jiang, K.; Ranade, S.; Piao, X.; Höglund, T.; Nakajima, T. HapticSerpent: A wearable haptic feedback robot for VR. In Proceedings of the Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April; pp. 1–6.
- Trinitatova, D.; Tsetserukou, D. DeltaTouch: A 3D Haptic Display for Delivering Multimodal Tactile Stimuli at the Palm. In Proceedings of the 2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9–12 July 2019; pp. 73–78. [Google Scholar]
- Teng, S.Y.; Lin, C.L.; Chiang, C.H.; Kuo, T.S.; Chan, L.; Huang, D.Y.; Chen, B.Y. TilePoP: Tile-type pop-up prop for virtual reality. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology, New Orleans, LA, USA, 20–23 October 2019; pp. 639–649. [Google Scholar]
- Khamis, M.; Schuster, N.; George, C.; Pfeiffer, M. ElectroCutscenes: Realistic Haptic Feedback in Cutscenes of Virtual Reality Games Using Electric Muscle Stimulation. In Proceedings of the 25th ACM Symposium on Virtual Reality Software and Technology, Parramatta, Australia, 12–15 November 2019; pp. 1–10. [Google Scholar]
- Pezent, E.; O’Malley, M.K.; Israr, A.; Samad, M.; Robinson, S.; Agarwal, P.; Benko, H.; Colonnese, N. Explorations of Wrist Haptic Feedback for AR/VR Interactions with Tasbi. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–4. [Google Scholar]
- Wang, Y.; Chen, Z.; Li, H.; Cao, Z.; Luo, H.; Zhang, T.; Ou, K.; Raiti, J.; Yu, C.; Patel, S.; et al. MoveVR: Enabling Multiform Force Feedback in Virtual Reality using Household Cleaning Robot. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020. [Google Scholar]
- Fang, C.; Zhang, Y.; Dworman, M.; Harrison, C. Wireality: Enabling complex tangible geometries in virtual reality with worn multi-string haptics. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020. [Google Scholar]
- Huang, H.Y.; Ning, C.W.; Wang, P.Y.; Cheng, J.H.; Cheng, L.P. Haptic-Go-Round: A surrounding platform for encounter-type haptics in virtual reality experiences. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020. [Google Scholar]
- Schwind, V.; Knierim, P.; Haas, N.; Henze, N. Using presence questionnaires in virtual reality. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019. [Google Scholar] [CrossRef]
- Slater, M. A Note on Presence Terminology. Presence Connect. 2003, 3, 1–5. [Google Scholar]
- Baumgartner, T.; Valko, L.; Esslen, M.; Jäncke, L. Neural correlate of spatial presence in an arousing and noninteractive virtual reality: An EEG and psychophysiology study. Cyberpsychol. Behav. 2006, 9, 30–45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baumgartner, T.; Speck, D.; Wettstein, D.; Masnari, O.; Beeli, G.; Jäncke, L. Feeling present in arousing virtual reality worlds: Prefrontal brain regions differentially orchestrate presence experience in adults and children. Front. Hum. Neurosci. 2008, 2, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tjon, D.M.; Tinga, A.M.; Alimardani, M.; Louwerse, M.M. Brain activity reflects sense of presence in 360 video for virtual reality. In Proceedings of the 28th International Conference on Information Systems Development, Toulon, France, 28–30 August 2019. [Google Scholar]
- Wiederhold, B.K.; Jang, D.P.; Kaneda, M.; Cabral, I.; Lurie, Y.; May, T.; Kim, I.; Wiederhold, M.D.; Kim, S. An investigation into physiological responses in virtual environments: An objective measurement of presence. Towards Cyberpsychol. Mind Cogn. Soc. Internet Age 2001, 2, 175–183. [Google Scholar]
- Meehan, M.; Insko, B.; Whitton, M.; Brooks, F.P., Jr. Physiological measures of presence in stressful virtual environments. ACM Trans. Graph. (Tog) 2002, 21, 645–652. [Google Scholar] [CrossRef] [Green Version]
- Blythe, M. Research through design fiction: Narrative in real and imaginary abstracts. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems—CHI ‘14, Toronto, ON, Canada, 26 April–1 May 2014; pp. 703–712. [Google Scholar] [CrossRef]
- Holoride: Virtual Reality Meets the Real World. Available online: https://www.audi.com/en/experience-audi/mobility-and-trends/digitalization/holoride-virtual-reality-meets-the-real-world.html (accessed on 30 April 2021).
- Jingyi, L.; Yong, M.; Puzhen, L.; Andreas, B. A Journey Through Nature: Exploring Virtual Restorative Environments as a Means to Relax in Confined Spaces. In Proceedings of the Creativity and Cognition—C&C ’21, Virtual Event, Italy, 22–23 June 2021. [Google Scholar] [CrossRef]
- McGill, M.; Ng, A.; Brewster, S. I Am The Passenger: How Visual Motion Cues Can Influence Sickness For In-Car VR. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems—CHI ‘17, Denver, CO, USA, 6–11 May 2017; pp. 5655–5668. [Google Scholar] [CrossRef] [Green Version]
- Kovacs, R.; Ofek, E.; Gonzalez Franco, M.; Siu, A.F.; Marwecki, S.; Holz, C.; Sinclair, M. Haptic PIVOT: On-Demand Handhelds in VR. In Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology, Minneapolis, MN, USA, 20–23 October 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 1046–1059. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| System | Ref. | Year | Haptics Type | Haptic Display | RE Scale | Applic. Scenario | Evaluation and Metrics |
|---|---|---|---|---|---|---|---|
| TactaVest | [16] | 2004 | Vibrotactile | Wearable | Walking | Simulat. | Robustness, ease of use, weight, power consumption, cable management |
| NMES Arm | [17] | 2006 | Force | Wearable | Seated | Gaming | Muscle constractions, pain, excitement, utility |
| VRScooter | [18] | 2006 | Vibrotactile Force | Grounded | Standing | Demo | Time to complete, satisfaction, presence, simulator sickness |
| FlexTorq./Tens. | [19] | 2011 | Kinesthetic Force | Wearable | Standing | Gaming | n/a |
| Diraptics | [20] | 2016 | Tactile | Wearable | Seated | Gaming | System accuracy, execution time, space awareness |
| VR360HD | [21] | 2016 | Vibrotactile | Grounded | Seated | Media Consum. | Location/speed/direction/ continuity recognition, sensory illusion |
| Nor./Tex.Touch | [22] | 2016 | Tactile | Handheld | Standing | Demo | Accuracy, realism |
| Cross-Field | [23] | 2016 | Tactile | Grounded | Standing | Accessi. | Perceptual threshold, spatial pattern recognition, scalability, resolution, safety |
| Haptics ToWall | [24] | 2017 | Force | Wearable | Walking | Gaming | Believablilty, impermeability, consistency, familiarity, realism, enjoyment, preference |
| Touchless Rhythm | [25] | 2018 | Tactile | Grounded | Standing | Gaming | n/a |
| PuPop | [26] | 2018 | Tactile Force | Wearable Physical Proxy | Seated | Gaming | Wearability, affordance, interactivity, acceptance, enjoyment, realism |
| Haptic Around | [27] | 2018 | Tactile | Grounded Handheld | Walking | Gaming Educat. Simulat. | Enjoyment, realism, quality, immersion |
| Haptic Serpent | [28] | 2018 | Force | Wearable | Standing | Demo | Comfort, acceptability |
| Delta Touch | [29] | 2019 | Tactile Force | Wearable | Seated | Demo | Tactile/weight perception |
| TilePop | [30] | 2019 | Kinesthetic Tactile | Physical Proxy | Walking | Gaming | User experience, safety |
| Electro Cutscenes | [31] | 2019 | Kinesthetic | Wearable | Standing | Gaming | Presence, realism, consistency, preference, involvement |
| Tasbi | [32] | 2020 | Vibrotactile Force | Wearable | Standing | Demo | Utility |
| MoveVR | [33] | 2020 | Force | Physical Proxy Autonomous | Walking | Gaming | Perception accuracy, realism, enjoyment, acceptability, user experience |
| Wireality | [34] | 2020 | Force | Wearable | Seated | Demo | Weight, field of reach, spatial consistency, realism, comfort, freedom of movement |
| Haptic GoRound | [35] | 2020 | Kinesthetic Tactile | Grounded Physical Proxy | Standing | Gaming | Performance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Mayer, A.; Butz, A. Towards a Design Space of Haptics in Everyday Virtual Reality across Different Spatial Scales. Multimodal Technol. Interact. 2021, 5, 36. https://doi.org/10.3390/mti5070036
Li J, Mayer A, Butz A. Towards a Design Space of Haptics in Everyday Virtual Reality across Different Spatial Scales. Multimodal Technologies and Interaction. 2021; 5(7):36. https://doi.org/10.3390/mti5070036
Chicago/Turabian StyleLi, Jingyi, Alexandra Mayer, and Andreas Butz. 2021. "Towards a Design Space of Haptics in Everyday Virtual Reality across Different Spatial Scales" Multimodal Technologies and Interaction 5, no. 7: 36. https://doi.org/10.3390/mti5070036
APA StyleLi, J., Mayer, A., & Butz, A. (2021). Towards a Design Space of Haptics in Everyday Virtual Reality across Different Spatial Scales. Multimodal Technologies and Interaction, 5(7), 36. https://doi.org/10.3390/mti5070036