
LFA: A Lévy Walk and Firefly-Based Search Algorithm: Application to Multi-Target Search and Multi-Robot Foraging



Abstract
:1. Introduction
2. Lévy Walk and Firefly Algorithms
- Fireflies are unisex so that one firefly will be attracted to other fireflies regardless of their sex.
- The attractiveness is proportional to the brightness. Moreover, it lowers when the distance increases. Thus, given two flashing fireflies, the one that is less bright will move in the direction of the brighter one. A firefly moves randomly until a brighter firefly is located.
- The landscape of the objective function determines the brightness of a firefly.
- Automatic partition of the population into subgroups so that each subgroup can swarm around a local mode. Thus, FA can deal with multi-modal optimization;
- The attraction mechanism of the FA can speed up the convergence. It is nonlinear and, thus, may be richer in terms of dynamic characteristics;
- FA can efficiently deal with a variegated range of optimization problems since it can include Particle Swarm Optimization, Differential Evolution, and Simulated Annealing with its special cases.
3. Related Works
3.1. Lévy Walk and Firefly-Based Search Works
3.2. Related Works Discussion
4. The Proposed Lévy Walk and Firefly-Based Search Algorithm (LFA)
4.1. The Parameters of the LFA
- the attractiveness is either or . is the attraction;
- the Light Intensity I is diffused whenever ; and
- since the attractiveness is relative, it should be seen in the beholder or judged by other fireflies. We represent the light intensity through a color to be seen by the other robots.
- Random walk Management: The random steps are generated using Lévy walk according to Equation (1) [6]. is fixed to 1 as in Reference [6]. After several experiments, is fixed to in the exploration state in order to increase the probability of generating steps with long size, while the same parameter is fixed to in exploitation state to obtain steps with small size.
- Light Intensity Management: Light Intensity I is managed using these three rules:
- 1.
- Increased each time a target is found according to Equation (4). represents light intensity at step t, and is the time spent in the exploitation state:
- 2.
- Decreased each time a target is not found according to Equation (5), where represents the time spent in the exploitation state:
- 3.
- Diffused regarding distance in each step according to Equation (6), where represents the light intensity at distance r, is a random real value , and r is a predefined distance:
- Following Behavior Management: To follow a detected light, the robot uses the movement rule according to Equation (7). The second term of Equation (7) is due to the attraction. The robot keeps moving until the criteria in Equation (8) is verified. In the equations, , , , and represent the coordinates (in the Cartesian axes) of and , stands for the distance between and , D is the distance to be kept between and in Follow Light state (see Algorithm 3 in the following), and and represent, respectively, the sensing and the following ranges.
- According to Yang and Deb [20], we initialize and .
- The sensing range of is fixed to m.
- To fulfill the technical specification of the Firefly algorithm that specifies a longer range for communication than for sensing (Intensity range, or ), we used Equation (4) to increase light intensity (light intensity is increased by percentage, which represents the percentage of elapsed time in the exploitation state ). Decreasing the intensity follows the same principle as increasing it; the intensity is decreased with percentage, which represents the percentage of elapsed time in exploitation state . Then, we specify a maximum Intensity range to allow the subdivision of swarm into sub-groups.
- In order to subdivide the search region between firefly robot and follower robots, we fixed the following distance to D in Equation (9). As shown in Figure 1, D represents the third of Firefly robot, which means that the first and the second are areas to be explored by the firefly robot, while the third one is allocated to follower robots.
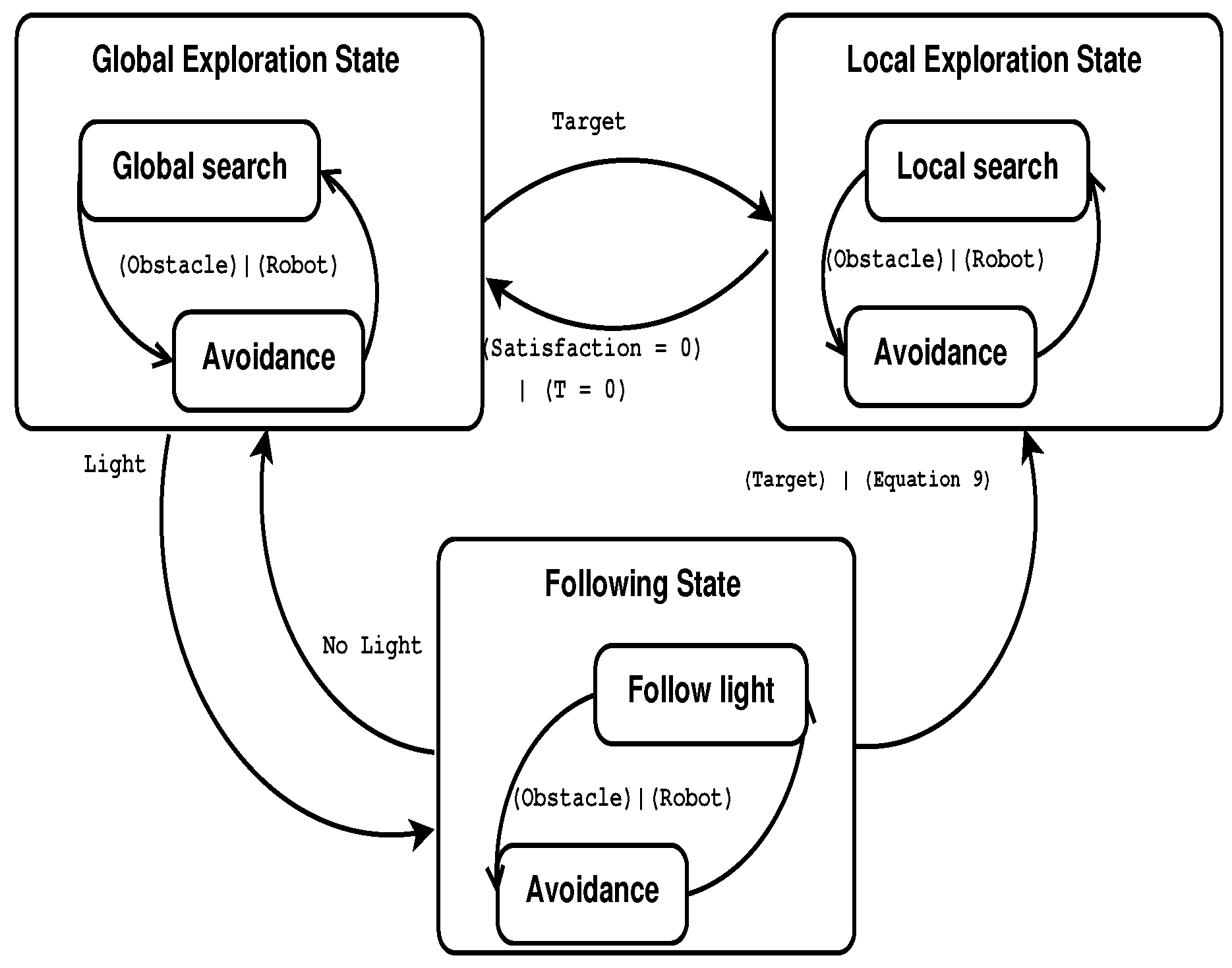
4.2. The Finite State Machine of LFA Robots
| Algorithm 1: Global Exploration (exploration). |
 |
| Algorithm 2: Local Exploration (exploitation). |
 |
| Algorithm 3: Follow light. |
 |
| Algorithm 4: Obstacle Avoidance. |
 |
5. Experimental Analysis
5.1. Results and Discussion
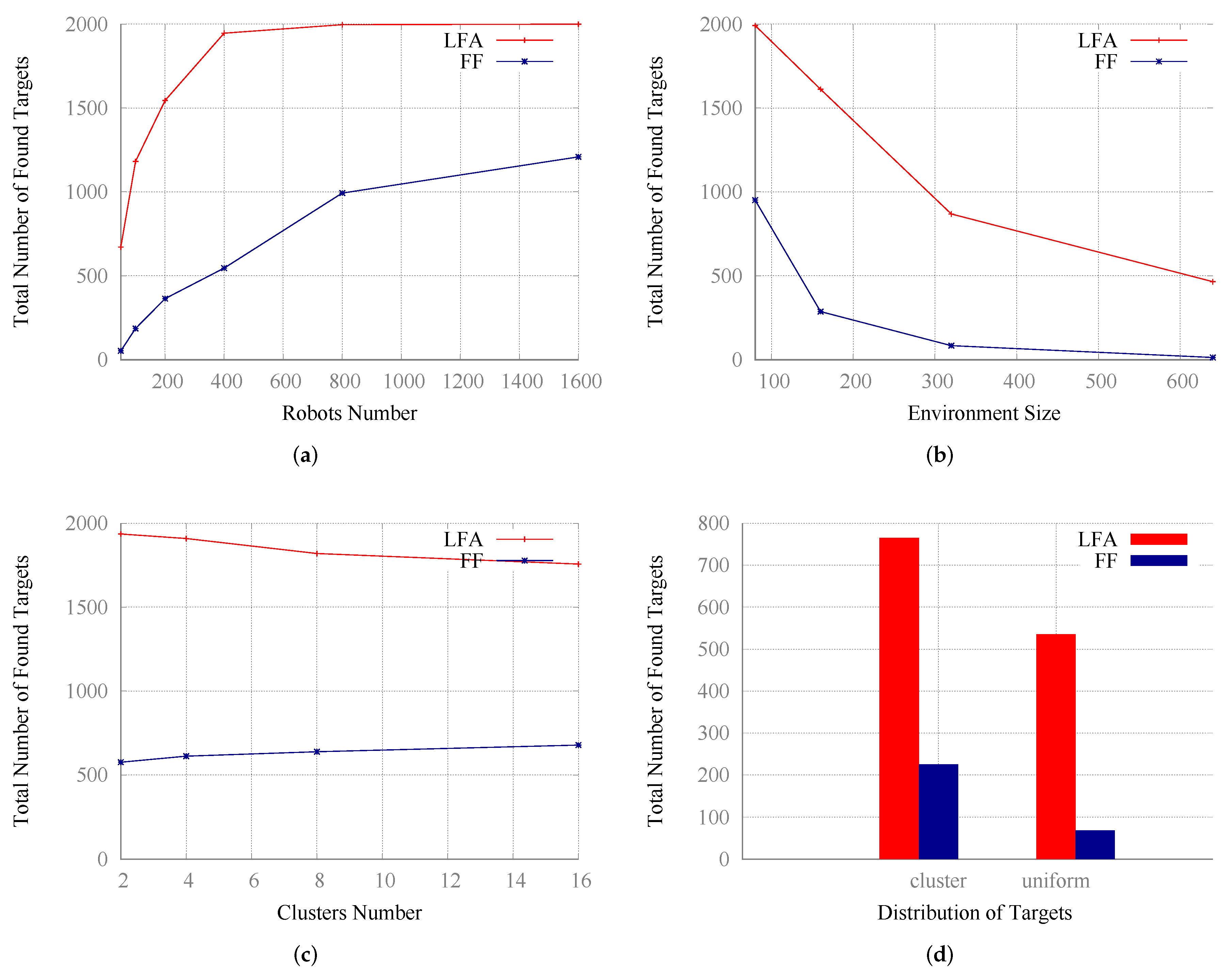
5.1.1. Results of Scenario 1
5.1.2. Results of Scenario 2
5.1.3. Results of Scenario 3
5.1.4. Results of Scenario 4
6. Application of LFA to Multi-Robot Foraging Problem (LFFA Algorithm)
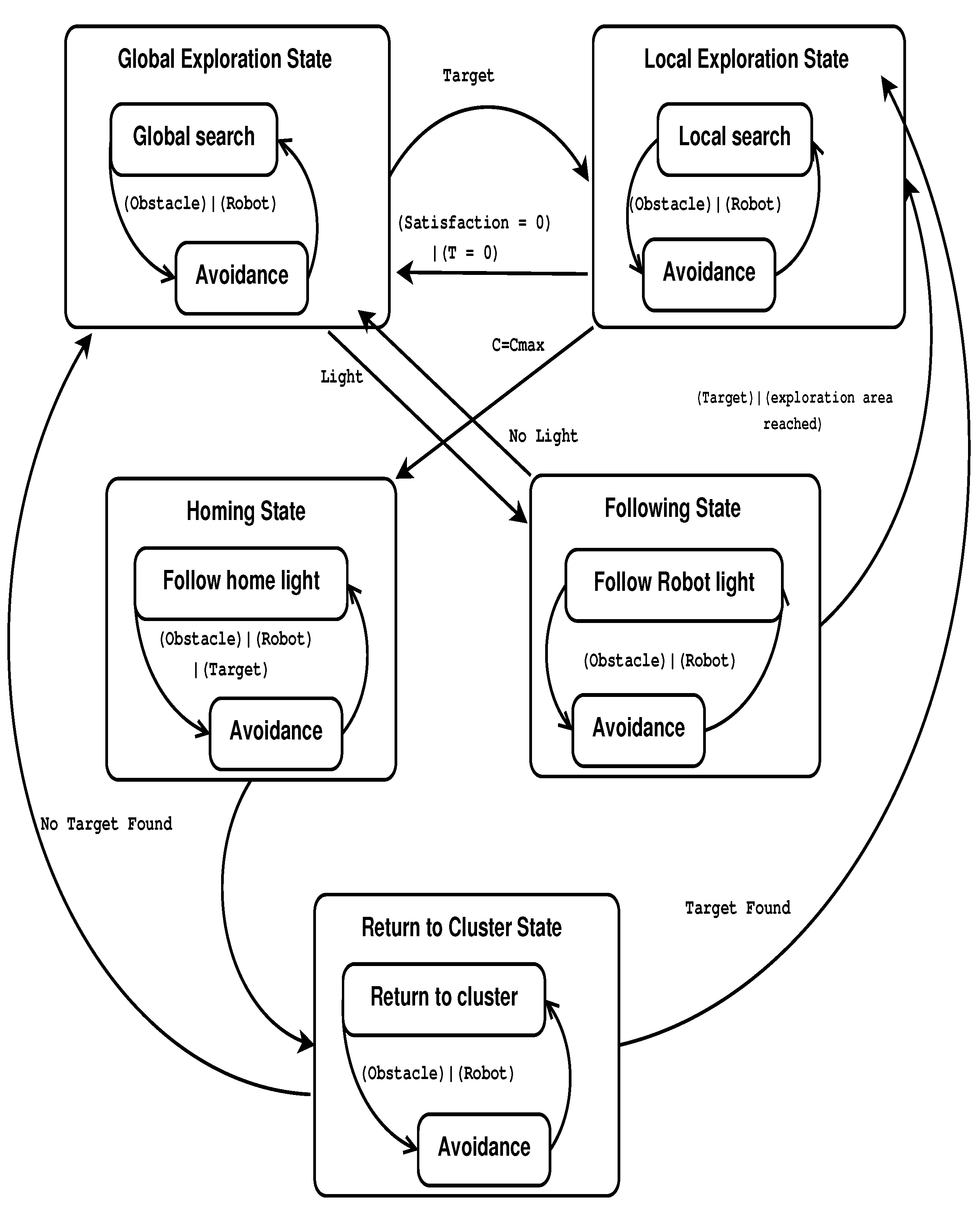
6.1. FSM of LFA Foragers
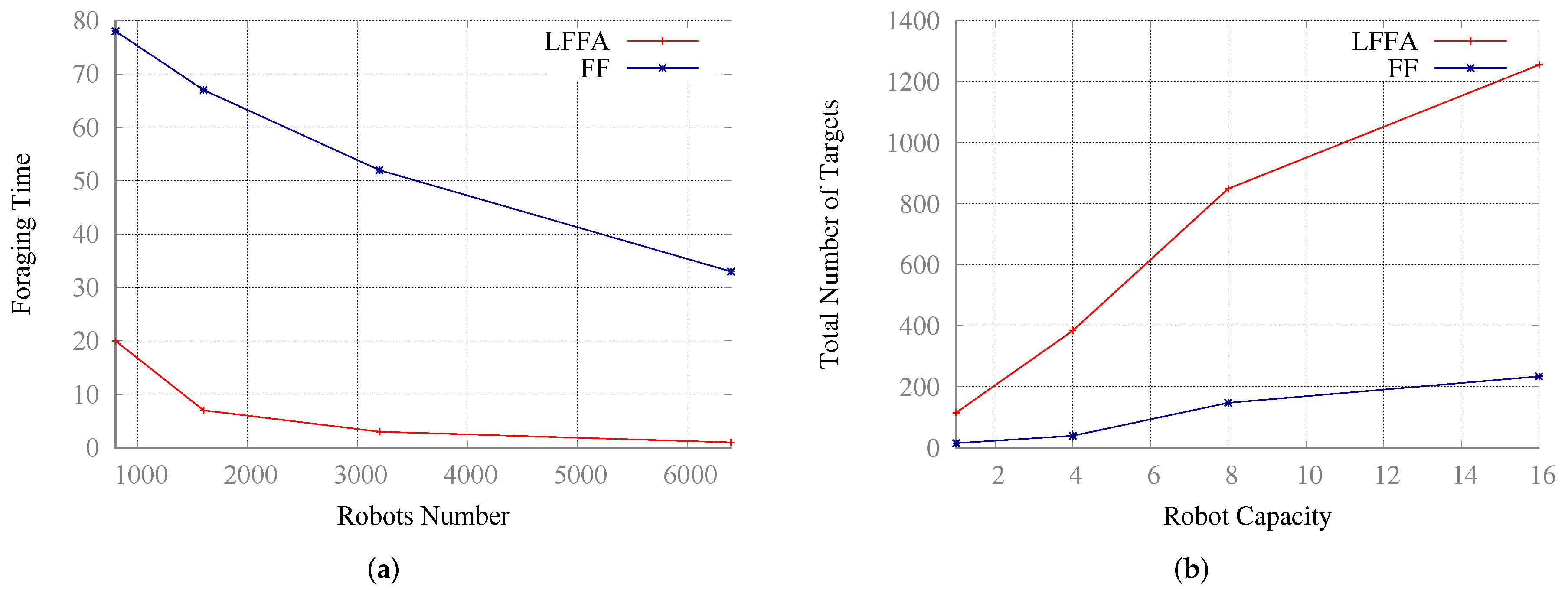
6.2. Experimental Scenarios
6.3. Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sahin, E. Swarm Robotics; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3342, pp. 10–20. [Google Scholar] [CrossRef]
- Şahin, E.; Girgin, S.; Bayindir, L.; Turgut, A.E. Swarm Robotics. In Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2008; pp. 87–100. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Zhou, X.; Sun, H.; Zhao, J.; Yu, X.; Cui, Z. Firefly algorithm with neighborhood attraction. Inf. Sci. 2017, 382–383, 374–387. [Google Scholar] [CrossRef]
- Iureva, R.A.; Maslennikov, O.S.; Komarov, I.I. Multiagent robotic systems’ ambient light sensor. Opt. Sens. 2017, 10231. [Google Scholar] [CrossRef]
- Zedadra, O.; Idiri, M.; Jouandeau, N.; Seridi, H.; Fortino, G. Lévy Walk-based Search Strategy: Application to Destructive Foraging. In Proceedings of the 2018 13th International Symposium on Programming and Systems (ISPS), Algiers, Algeria, 24–26 April 2018; pp. 1–6. [Google Scholar]
- Tran, T.; Nguyen, T.T.; Nguyen, H.L. Global optimization using Lévy flights. arXiv 2014, arXiv:1407.5739. [Google Scholar]
- Yang, X.S. Firefly Algorithms for Multimodal Optimization. In Stochastic Algorithms: Foundations and Applications; Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2009; Volume 5792 LNCS, pp. 169–178. [Google Scholar] [CrossRef] [Green Version]
- Ali, N.; Othman, M.A.; Husain, M.N.; Misran, M.H. A review of firefly algorithm. ARPN J. Eng. Appl. Sci. 2014, 9, 1732–1736. [Google Scholar]
- Yang, X.S.; He, X. Firefly algorithm: Recent advances and applications. Int. J. Swarm Intell. 2013, 1, 36. [Google Scholar] [CrossRef] [Green Version]
- Fister, I.; Yang, X.S.; Fister, D.; Fister, I., Jr. Firefly algorithm: A brief review of the expanding literature. In Cuckoo Search and Firefly Algorithm; Yang, X.S., Ed.; Studies in Computational Intelligence; Springer International Publishing: Berlin/Heidelberg, Germany, 2014; Volume 516, pp. 347–360. [Google Scholar] [CrossRef] [Green Version]
- Lenagh, W.; Dasgupta, P. Levy Distributed Search Behaviors for Mobile Target Locating and Tracking. In Proceedings of the 19th Annual Conference on Behavior Representation in Modeling and Simulation, Charleston, SC, USA, 22–25 March 2010; pp. 103–109. [Google Scholar]
- Fioriti, V.; Fratichini, F.; Chiesa, S.; Moriconi, C. Levy Foraging in a Dynamic Environment—Extending the Levy Search. Int. J. Adv. Robot. Syst. 2015, 12, 98. [Google Scholar] [CrossRef] [Green Version]
- Katada, Y.; Nishiguchi, A.; Moriwaki, K.; Watakabe, R. Swarm robotic network using Lévy flight in target detection problem. Artif. Life Robot. 2016, 21, 295–301. [Google Scholar] [CrossRef]
- Krivonosov, M.; Denisov, S.; Zaburdaev, V. Lévy robotics. arXiv 2016, arXiv:1612.03997. [Google Scholar]
- Palmieri, N.; Marano, S. Discrete firefly algorithm for recruiting task in a swarm of robots. In Nature-Inspired Computation in Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 133–150. [Google Scholar]
- De Rango, F.; Palmieri, N. A swarm-based robot team coordination protocol for mine detection and unknown space discovery. In Proceedings of the 2012 8th International Wireless Communications and Mobile Computing Conference (IWCMC), Barcelona, Spain, 8–10 October 2012; pp. 703–708. [Google Scholar] [CrossRef]
- Sutantyo, D.K.; Kernbach, S.; Levi, P.; Nepomnyashchikh, V.A. Multi-robot searching algorithm using Lévy flight and artificial potential field. In Proceedings of the 2010 IEEE Safety Security and Rescue Robotics, Bremen, Germany, 26–30 July 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Sutantyo, D.; Levi, P.; Moslinger, C.; Read, M. Collective-adaptive Lévy flight for underwater multi-robot exploration. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 456–462. [Google Scholar] [CrossRef]
- Fujisawa, R.; Dobata, S. Lévy walk enhances efficiency of group foraging in pheromone-communicating swarm robots. In Proceedings of the 2013 IEEE/SICE International Symposium on System Integration, Kobe, Japan, 15–17 December 2013; pp. 808–813. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Eagle Strategy Using Lévy Walk and Firefly Algorithms for Stochastic Optimization. In Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2010; Volume 284, pp. 101–111. [Google Scholar] [CrossRef] [Green Version]
- Hassanzadeh, T.; Kanan, H.R. Fuzzy FA: A Modified Firefly Algorithm. Appl. Artif. Intell. 2014, 28, 47–65. [Google Scholar] [CrossRef]
- Yu, S.; Zhu, S.; Ma, Y.; Mao, D. A variable step size firefly algorithm for numerical optimization. Appl. Math. Comput. 2015, 263, 214–220. [Google Scholar] [CrossRef]
- Pinciroli, C.; Trianni, V.; O’Grady, R.; Pini, G.; Brutschy, A.; Brambilla, M.; Mathews, N.; Ferrante, E.; Di Caro, G.; Ducatelle, F.; et al. ARGoS: A modular, parallel, multi-engine simulator for multi-robot systems. Swarm Intell. 2012, 6, 271–295. [Google Scholar] [CrossRef] [Green Version]
- Zedadra, O.; Guerrieri, A.; Seridi, H.; Fortino, G. A Lévy Walk and Firefly Based Multi-Robots Foraging Algorithm. In Proceedings of the International Conference on Internet and Distributed Computing Systems, Naples, Italy, 10–12 October 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 213–222. [Google Scholar]
- Zedadra, O.; Seridi, H.; Jouandeau, N.; Fortino, G. An Energy-Aware Algorithm for Large Scale Foraging Systems. Scalable Comput. Pract. Exp. 2016, 16, 449–466. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Varying the number of robots—Scenario 1 | |
| Number of Robots | 50, 100, 200, 400, 800, 1600 |
| Target Distribution | clustered |
| Number of Clusters | 10 |
| Number of Targets | 2000 |
| Environment Size | |
| Varying the environment size—Scenario 2 | |
| Environment Size | , , , |
| Number of Robots | 80 |
| Target Distribution | clustered |
| Number of Targets | 2000 |
| Number of Clusters | 10 |
| Varying the number of clusters—Scenario 3 | |
| Number of Clusters | 2, 4, 8, 16 |
| Number of Robots | 80 |
| Target Distribution | clustered |
| Number of Targets | 2000 |
| Environment Size | |
| Varying the distribution of targets—Scenario 4 | |
| Target Distribution | clustered, uniform |
| Number of Robots | 80 |
| Number of Targets | 800 |
| Number of Clusters | 10 |
| Environment Size |
| Number of Robots | 50 | 100 | 200 | 400 | 800 | 1600 |
|---|---|---|---|---|---|---|
| LFA | 671.2 | 1182.6 | 1545.5 | 1946.8 | 1997.6 | 2000 |
| FF | 53.8 | 186.6 | 364.2 | 546.4 | 993.9 | 1209.3 |
| Environment Size | ||||
|---|---|---|---|---|
| LFA | 1992.3 | 1612.6 | 869.6 | 465.9 |
| FF | 951.2 | 287.1 | 84.1 | 13.2 |
| Number of Clusters | 2 | 4 | 8 | 16 |
|---|---|---|---|---|
| LFA | 1936.9 | 1909.4 | 1820.8 | 1757.2 |
| FF | 576.1 | 612 | 638.5 | 678.7 |
| Distribution of Targets | Clusters | Uniform Distribution |
|---|---|---|
| LFA | 765.1 | 535.5 |
| FF | 225.1 | 68.6 |
| Parameter | Value | |
|---|---|---|
| Varying the number of robots—Scenario 1 | ||
| Number of Robots | 800–6400 | |
| Target Distribution | ||
| Number of Targets | 1000 | |
| Number of Clusters | 10 | |
| Environment Size | 240 m × 240 m | |
| Varying the capacity of robots—Scenario 2 | ||
| Number of Robots | 80 | |
| Capacity of the Robots | 1–16 | |
| Target Distribution | ||
| Number of Targets | 2000 | |
| Number of Clusters | 10 | |
| Environment Size | 120 m × 120 m |
| Number of Robots | 800 | 1600 | 3200 | 6400 |
|---|---|---|---|---|
| LFFA—Foraging Time | 20.71 | 7.51 | 3.48 | 1.62 |
| FF—Foraging Time | 78.91 | 67.45 | 52.11 | 33.5 |
| Capacity of the Robots | 1 | 4 | 8 | 16 |
|---|---|---|---|---|
| LFFA—Total Number of targets | 115.4 | 384.3 | 849.7 | 1255.5 |
| FF—Total Number of targets | 15.6 | 39.6 | 147.6 | 234.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zedadra, O.; Guerrieri, A.; Seridi, H. LFA: A Lévy Walk and Firefly-Based Search Algorithm: Application to Multi-Target Search and Multi-Robot Foraging. Big Data Cogn. Comput. 2022, 6, 22. https://doi.org/10.3390/bdcc6010022
Zedadra O, Guerrieri A, Seridi H. LFA: A Lévy Walk and Firefly-Based Search Algorithm: Application to Multi-Target Search and Multi-Robot Foraging. Big Data and Cognitive Computing. 2022; 6(1):22. https://doi.org/10.3390/bdcc6010022
Chicago/Turabian StyleZedadra, Ouarda, Antonio Guerrieri, and Hamid Seridi. 2022. "LFA: A Lévy Walk and Firefly-Based Search Algorithm: Application to Multi-Target Search and Multi-Robot Foraging" Big Data and Cognitive Computing 6, no. 1: 22. https://doi.org/10.3390/bdcc6010022
APA StyleZedadra, O., Guerrieri, A., & Seridi, H. (2022). LFA: A Lévy Walk and Firefly-Based Search Algorithm: Application to Multi-Target Search and Multi-Robot Foraging. Big Data and Cognitive Computing, 6(1), 22. https://doi.org/10.3390/bdcc6010022