

Correlation Analysis between Rail Track Geometry and Car-Body Vibration Based on Fractal Theory

Abstract
:1. Introduction
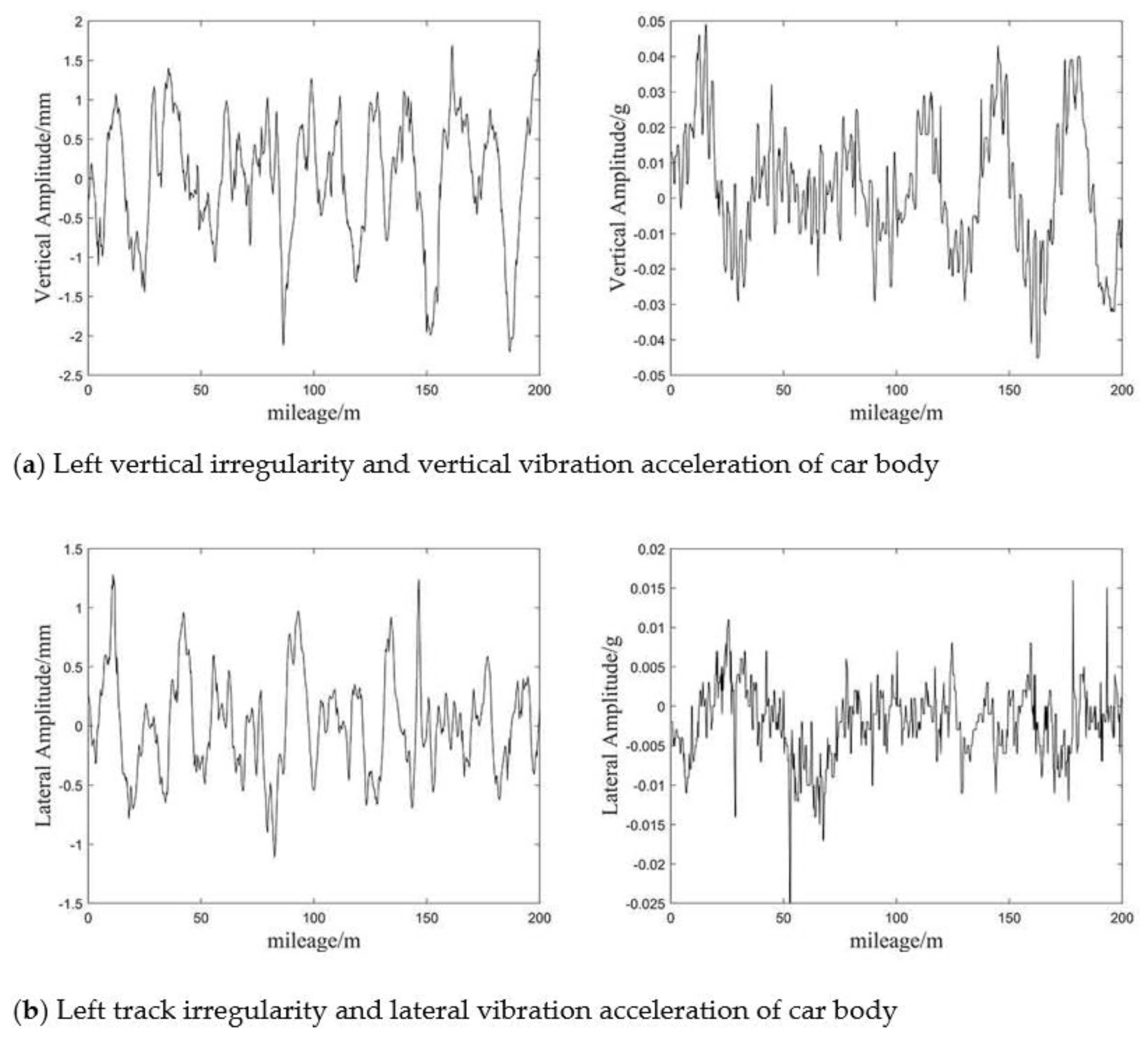
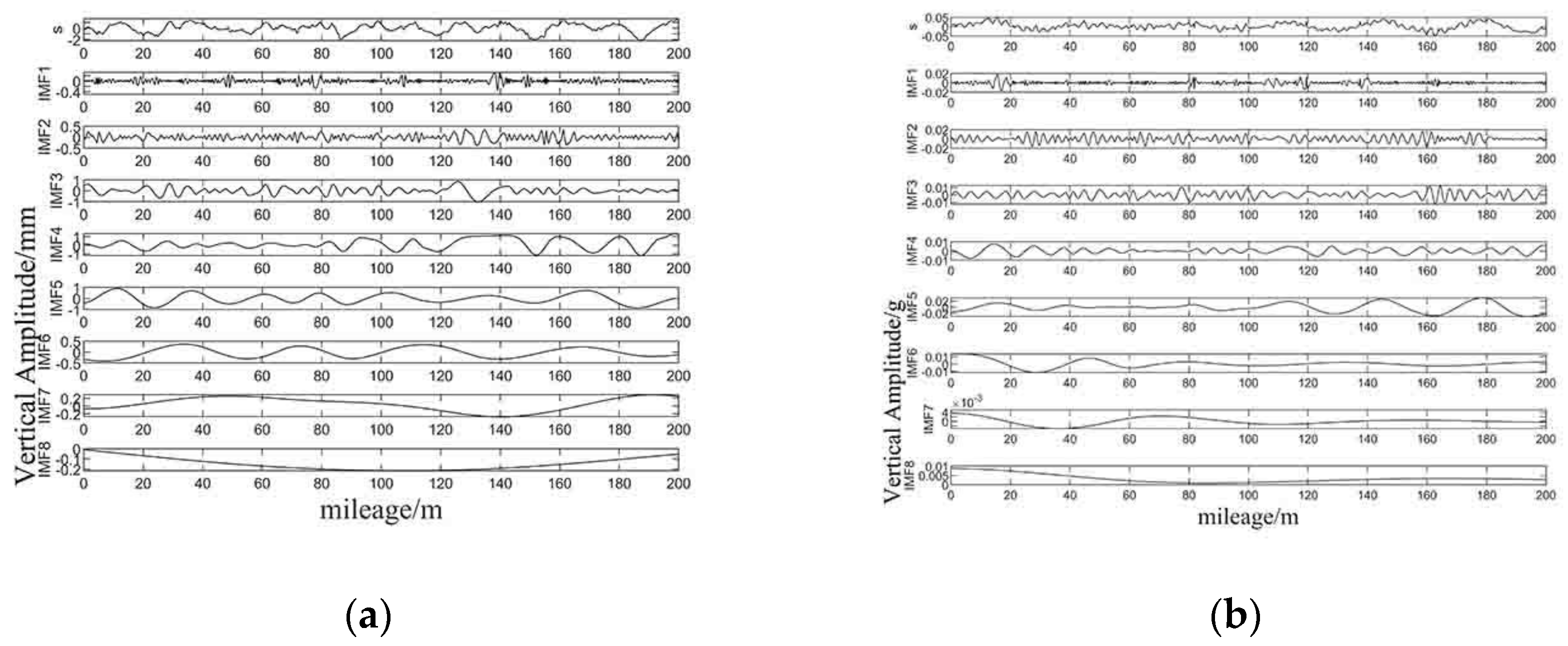
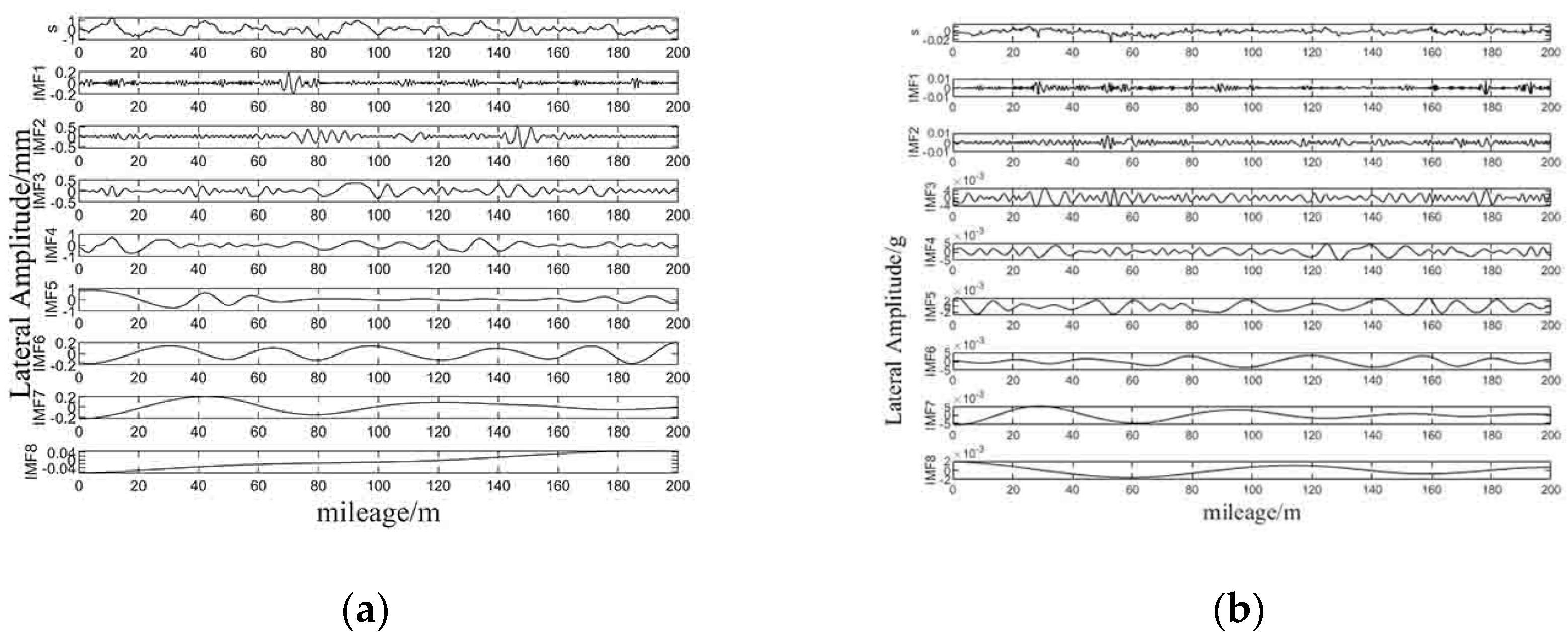
2. Time-Frequency Analysis of Track Geometry and Car-Body Vibration Data
3. Fractal Properties of Track Geometry and Car-Body Acceleration
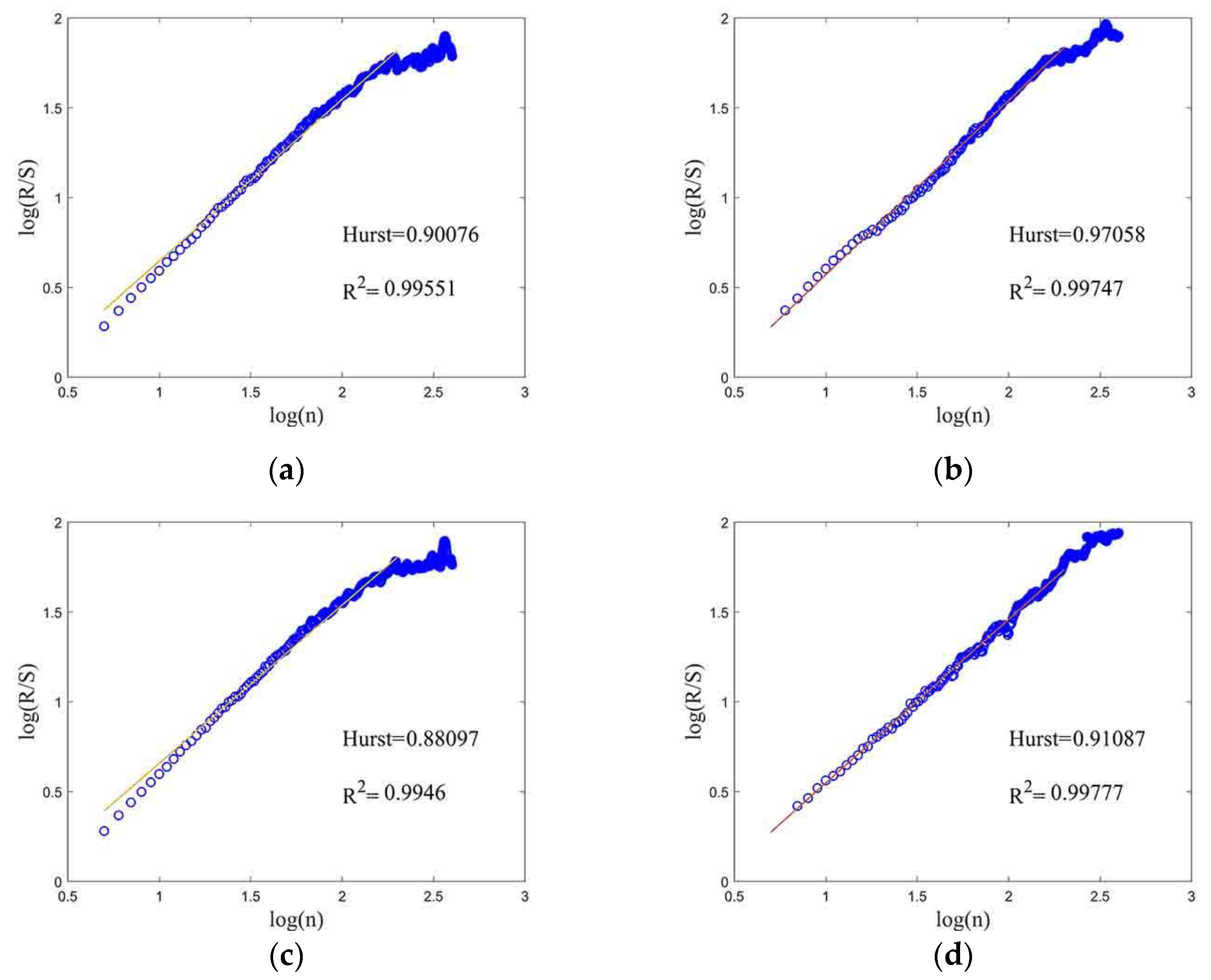
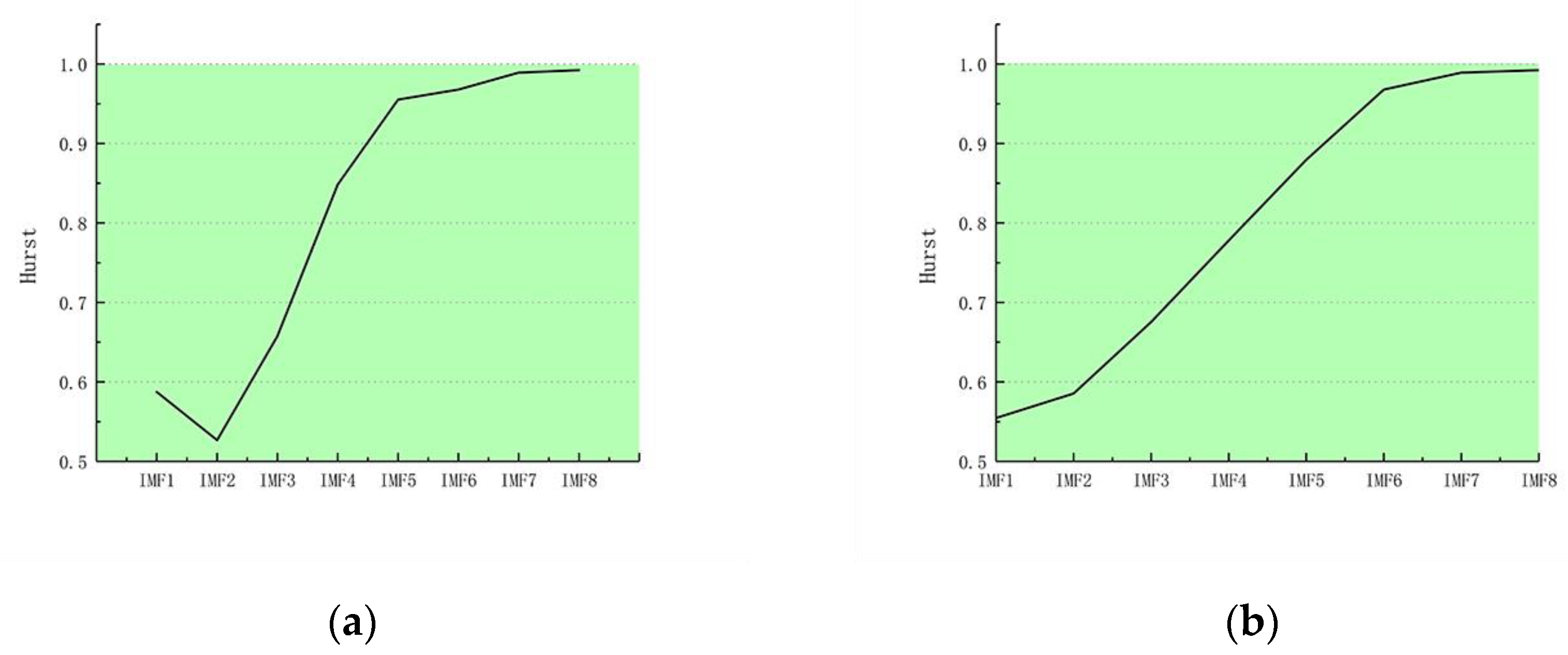
3.1. Self-Similarity Analysis
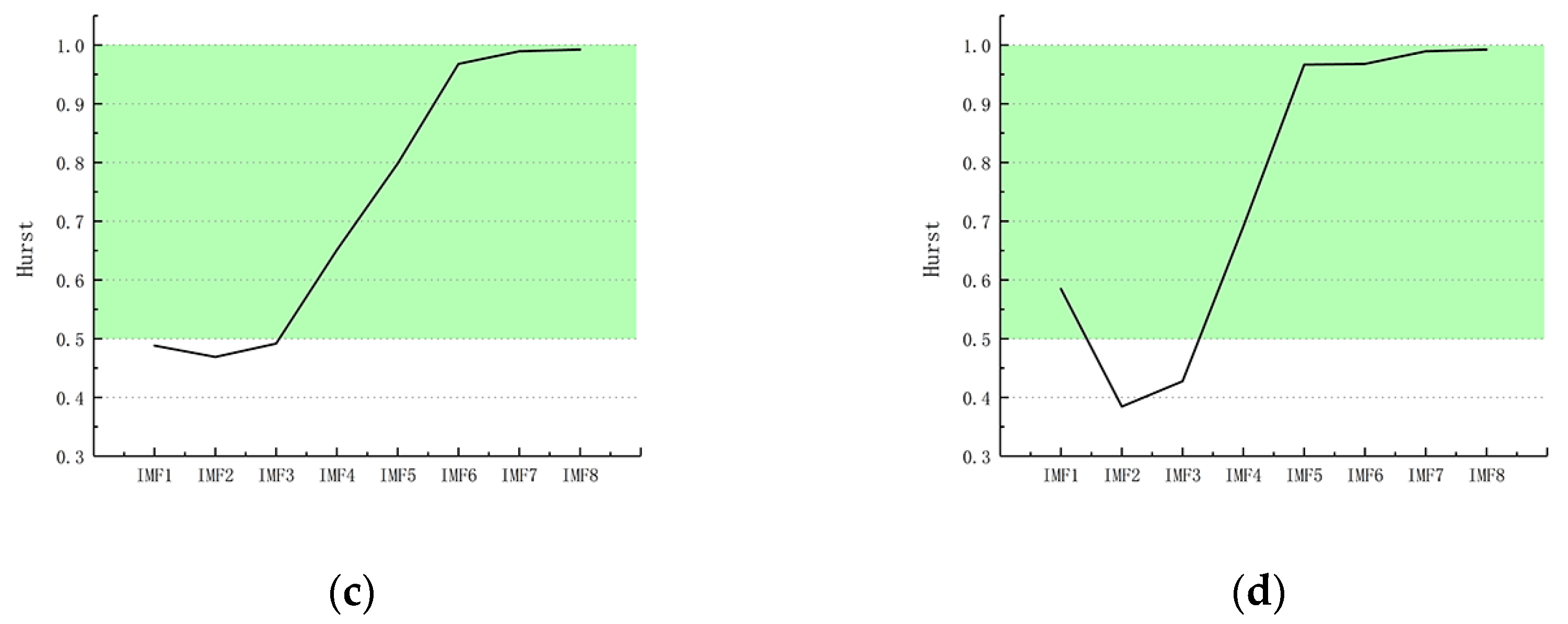
3.2. Fractal Dimension of Track Irregularity and Car-Body Acceleration
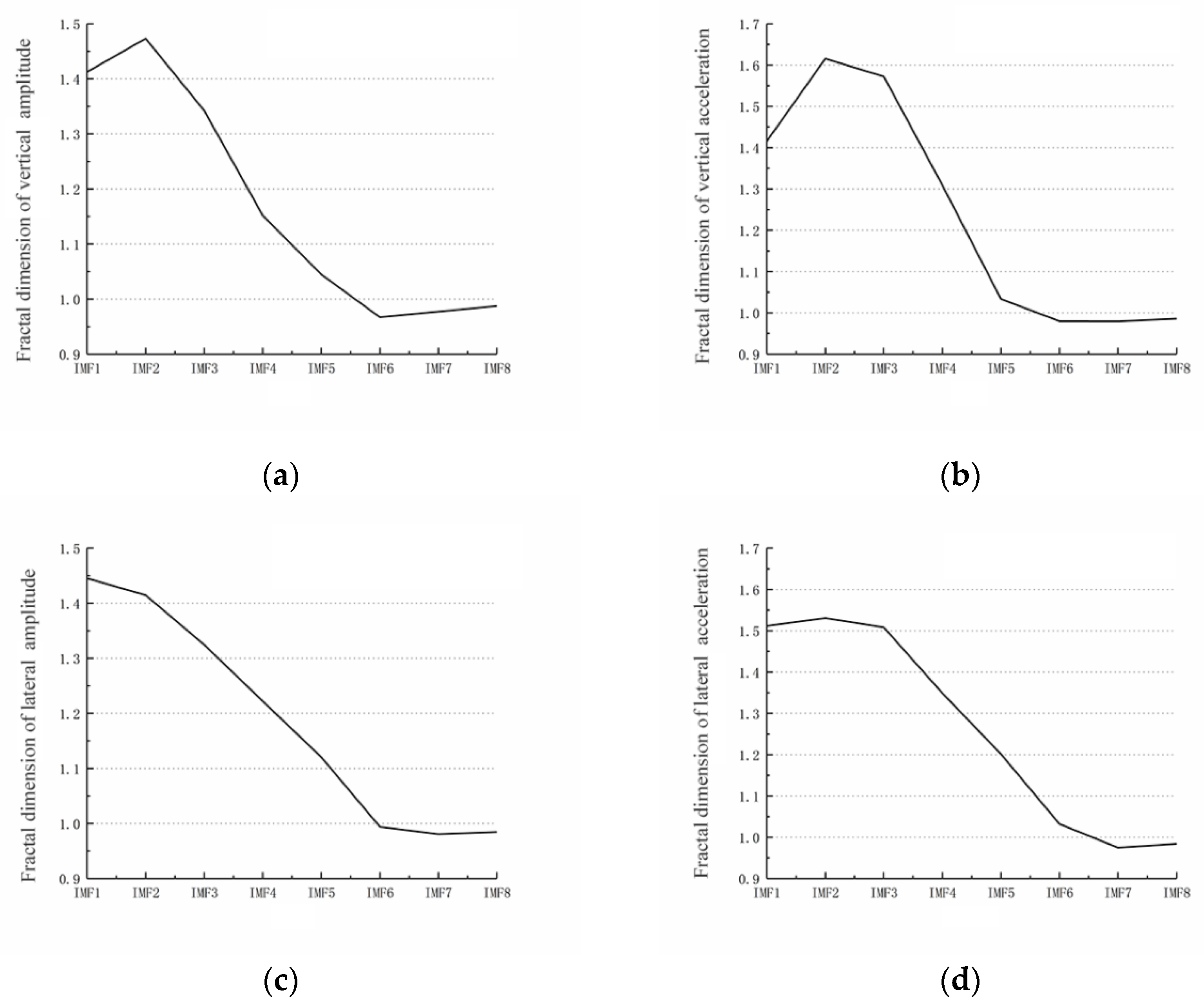
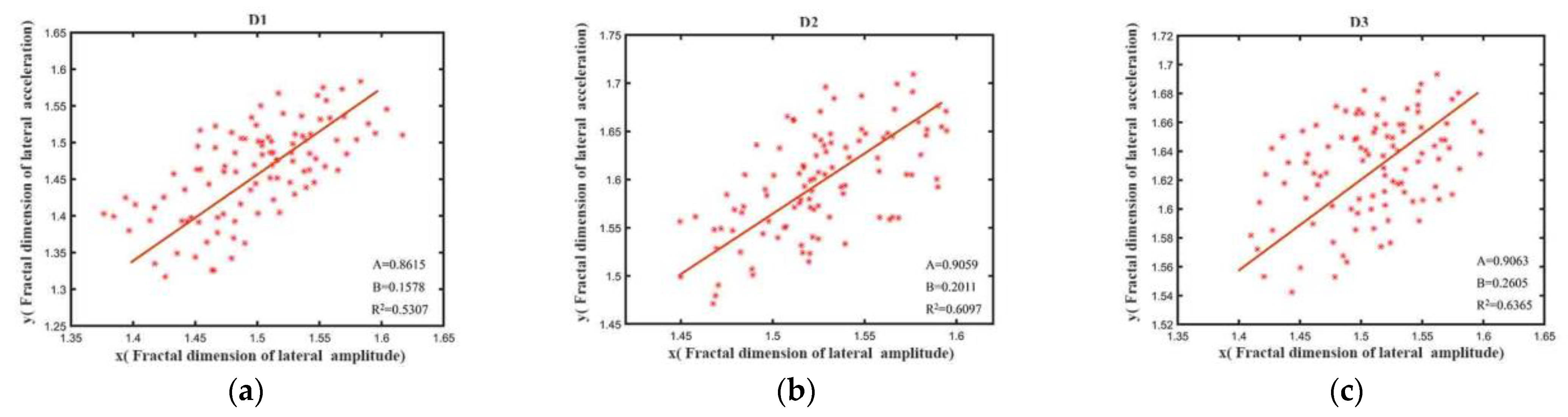
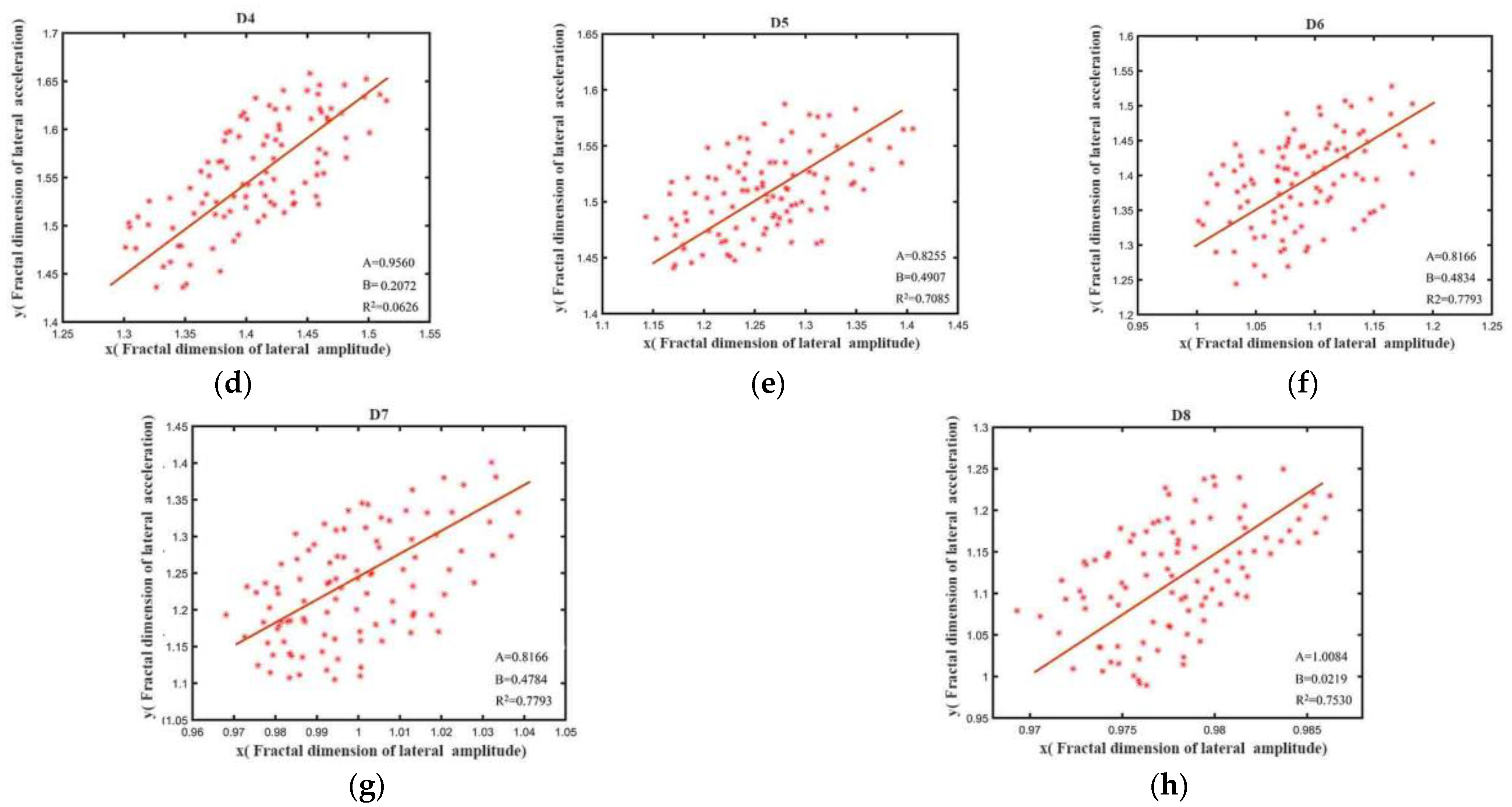
4. Correlation between Track Irregularity and Car-Body Acceleration
5. Conclusions
- The relationship between the time series of track irregularity and the corresponding car-body acceleration is not obvious, but on the IMF waveform, the peaks of the irregularity data match well with those in the acceleration data;
- Both the track irregularity and car-body vibration acceleration satisfy the fractal features based on the calculation results of the Hurst exponent, so the features of their waveforms can be characterized by their fractal dimensions;
- With an increase in wavelength, the fractal dimensions of both track irregularity and car-body acceleration decrease gradually; the variation trends of the fractal dimensions of vertical acceleration and surface irregularity are the same; similarly, the variation trends of the fractal dimensions of lateral acceleration and alignment irregularity are the same; the fractal dimension is only related to the roughness of the waveform and is irrelevant to the amplitude of the time series;
- The corresponding relationship between the fractal dimensions of the track irregularity and the car-body vibration acceleration is clear in the long wavelength region, through a large correlation coefficient.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Choi, I.I.; Um, J.; Lee, J.S.; Choi, H. The influence of track irregularities on the running behavior of high-speed trains. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2012, 227, 94–102. [Google Scholar] [CrossRef]
- Zhang, W.; Zeng, J.; Li, Y. A review of vehicle system dynamics in the development of high-speed trains in China. Int. J. Dyn. Control 2013, 1, 81–97. [Google Scholar] [CrossRef] [Green Version]
- Xin, T.; Wang, P.; Ding, Y. Effect of long-wavelength track irregularities on vehicle dynamic responses. Shock Vib. 2019, 2019, 4178065. [Google Scholar] [CrossRef]
- Zhai, W.; Wang, K.; Cai, C. Fundamentals of vehicle–track coupled dynamics. Veh. Syst. Dyn. 2009, 47, 1349–1376. [Google Scholar] [CrossRef]
- Xin, L.; Li, X.; Zhu, Y.; Liu, M. Uncertainty and sensitivity analysis for train-ballasted track-bridge system. Veh. Syst. Dyn. 2020, 58, 453–471. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Z.; Liu, Z.; Wang, R. A spatial coupling model to study dynamic performance of pantograph-catenary with vehicle-track excitation. Mech. Syst. Signal Process. 2021, 151, 151107336. [Google Scholar] [CrossRef]
- Xu, L.; Zhai, W. A novel model for determining the amplitude-wavelength limits of track irregularities accompanied by a reliability assessment in railway vehicle-track dynamics. Mech. Syst. Signal Process. 2017, 86, 260–277. [Google Scholar] [CrossRef]
- Sadeghi, J.; Rabiee, S.; Khajehdezfuly, A. Effect of rail irregularities on ride comfort of train moving over ballast-less tracks. Int. J. Struct. Stab. Dyn. 2019, 19, 1950060. [Google Scholar] [CrossRef]
- Liu, C.; Thompson, D.; Griffin, M.J.; Entezami, M. Effect of train speed and track geometry on the ride comfort in high-speed railways based on ISO 2631-1. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2019, 234, 765–778. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Zhai, W. A spectral evolution model for track geometric degradation in train-track long-term dynamics. Veh. Syst. Dyn. 2020, 58, 1–27. [Google Scholar] [CrossRef]
- Li, Z.; Liu, X.; Chen, S. A reliability assessment approach for slab track structure based on vehicle-track dynamics and surrogate model. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2022, 236, 79–89. [Google Scholar] [CrossRef]
- Sadeghi, J.; Askarinejad, H. Application of neural networks in evaluation of railway track quality condition. J. Mech. Sci. Technol. 2012, 26, 113–122. [Google Scholar] [CrossRef]
- Tsai, H.; Wang, C.; Huang, N.E.; Kuo, T.; Chieng, W. Railway track inspection based on the vibration response to a scheduled train and the Hilbert–Huang transform. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2014, 229, 815–829. [Google Scholar] [CrossRef]
- Li, Z.; Liu, X.; He, Y. Identification of temperature-induced deformation for HSR slab track using track geometry measurement data. Sensors 2019, 19, 5446. [Google Scholar] [CrossRef] [Green Version]
- Kraft, S.; Causse, J.; Martinez, A. Black-box modelling of nonlinear railway vehicle dynamics for track geometry assessment using neural networks. Veh. Syst. Dyn. 2018, 57, 1241–1270. [Google Scholar] [CrossRef]
- Balouchi, F.; Bevan, A.; Formston, R. Development of railway track condition monitoring from multi-train in-service vehicles. Veh. Syst. Dyn. 2020, 59, 1397–1417. [Google Scholar] [CrossRef] [Green Version]
- Higgins, C.; Liu, X. Modeling of track geometry degradation and decisions on safety and maintenance: A literature review and possible future research directions. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 1385–1397. [Google Scholar] [CrossRef]
- Soleimanmeigouni, I.; Ahmadi, A.; Kumar, U. Track geometry degradation and maintenance modelling: A review. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 73–102. [Google Scholar] [CrossRef]
- Li, Z.; Lian, S.; He, Y. Time-frequency analysis of horizontal vibration for vehicle-track system based on Hilbert-Huang Transform. Adv. Mech. Eng. 2015, 5, 954102. [Google Scholar] [CrossRef]
- Zhai, W.; Han, Z.; Chen, Z.; Ling, L.; Zhu, S. Train-track-bridge dynamic interaction: A state-of-the-art review. Veh. Syst. Dyn. 2019, 57, 984–1027. [Google Scholar] [CrossRef]
- Haigermoser, A.; Luber, B.; Rauh, J.; Gräfe, G. Road and track irregularities: Measurement, assessment and simulation. Veh. Syst. Dyn. 2015, 53, 878–957. [Google Scholar] [CrossRef]
- Lei, X.; Noda, N.A. Analyses of dynamic response of vehicle and track coupling system with random irregularity of track vertical profile. J. Sound Vib. 2002, 258, 147–165. [Google Scholar] [CrossRef]
- Hyslip, J.P. Fractal analysis of track geometry data. Transp. Res. Rec. J. Transp. Res. Board 2002, 1, 50–57. [Google Scholar] [CrossRef] [Green Version]
- Landgraf, M.; Hansmann, F. Fractal analysis as an innovative approach for evaluating the condition of railway tracks. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 233, 596–605. [Google Scholar] [CrossRef]
- Xie, H.; Wang, J.; Xie, W. Fractal effects of surface roughness on the mechanical behavior of rock joints. Chaos Solitons Fractals 1997, 8, 221–252. [Google Scholar] [CrossRef]
- Cox, B.L.; Wang, J.S.Y. Fractal surfaces: Measurement and applications in the earth sciences. Fractals 2012, 1, 87–115. [Google Scholar] [CrossRef]
- Peng, J.; Liu, Z.; Liu, Y.; Wu, J.; Han, Y. Trend analysis of vegetation dynamics in Qinghai–Tibet Plateau using Hurst Exponent. Ecol. Indic. 2012, 14, 28–39. [Google Scholar] [CrossRef]
- Rafique, M.; Iqbal, J.; Ali, S.S.A.; Alam, A.; Javed, L.K.; Barkat, A.; Ali, S.M.; Ahmad, Q.S.; Nikolopoulos, D. On fractal dimensions of soil radon gas time series. J. Atmos. Sol. Terr. Phys. 2022, 227, 105775. [Google Scholar] [CrossRef]
- Taciroğlu, M.V.; Karaşahin, M.; Tığdemir, M.; Işıker, H. Fractal analysis of high speed rail geometry data: A case study of Ankara-Eskişehir high speed rail. Measurement 2020, 165, 108120. [Google Scholar] [CrossRef]
- Li, Z.; Wu, P.; Liu, X.; He, Y. Fractal characteristics of ballastless track irregularities of high-speed railway. J. Vib. Shock. 2022, 41, 281–288. (In Chinese) [Google Scholar]
- Liang, X.; Lin, B.; Han, X.; Chen, S. Fractal analysis of engineering ceramics ground surface. Appl. Surf. Sci. 2012, 258, 6406–6415. [Google Scholar] [CrossRef]
- Miller, S. Improved method for fractal analysis using scanning probe microscopy. J. Vac. Sci. Technol. B Microelectron. Nanometer Struct. 1992, 10, 1203. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter A | Parameter B | Correlation Coefficient | |
|---|---|---|---|
| IMF1 | 0.7220 | 1.7139 | 0.5916 |
| IMF2 | 0.6696 | 1.6529 | 0.5553 |
| IMF3 | 0.8792 | 1.4533 | 0.7164 |
| IMF4 | 0.8513 | 1.4597 | 0.6476 |
| IMF5 | 0.8174 | 1.2856 | 0.7302 |
| IMF6 | 0.9150 | 1.0526 | 0.7014 |
| IMF7 | 0.9601 | 0.9709 | 0.9286 |
| IMF8 | 0.8499 | 0.9360 | 0.5370 |
| Parameter A | Parameter B | Correlation Coefficient | |
|---|---|---|---|
| IMF1 | 0.8615 | 1.7329 | 0.6195 |
| IMF2 | 0.9059 | 1.4273 | 0.6097 |
| IMF3 | 0.9063 | 1.7812 | 0.6365 |
| IMF4 | 0.9560 | 1.4062 | 0.7071 |
| IMF5 | 0.8255 | 1.4256 | 0.7085 |
| IMF6 | 0.8166 | 1.2584 | 0.7793 |
| IMF7 | 0.8479 | 1.1284 | 0.7326 |
| IMF8 | 1.0084 | 2.0957 | 0.7530 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.-Z.; Li, Z.-W.; Wu, J.; Song, C.-J.; Xiao, J.-H. Correlation Analysis between Rail Track Geometry and Car-Body Vibration Based on Fractal Theory. Fractal Fract. 2022, 6, 727. https://doi.org/10.3390/fractalfract6120727
Liu X-Z, Li Z-W, Wu J, Song C-J, Xiao J-H. Correlation Analysis between Rail Track Geometry and Car-Body Vibration Based on Fractal Theory. Fractal and Fractional. 2022; 6(12):727. https://doi.org/10.3390/fractalfract6120727
Chicago/Turabian StyleLiu, Xiao-Zhou, Zai-Wei Li, Jun Wu, Cheng-Jie Song, and Jun-Hua Xiao. 2022. "Correlation Analysis between Rail Track Geometry and Car-Body Vibration Based on Fractal Theory" Fractal and Fractional 6, no. 12: 727. https://doi.org/10.3390/fractalfract6120727
APA StyleLiu, X. -Z., Li, Z. -W., Wu, J., Song, C. -J., & Xiao, J. -H. (2022). Correlation Analysis between Rail Track Geometry and Car-Body Vibration Based on Fractal Theory. Fractal and Fractional, 6(12), 727. https://doi.org/10.3390/fractalfract6120727