
Optimal Design of TD-TI Controller for LFC Considering Renewables Penetration by an Improved Chaos Game Optimizer

 ,
,  ,
, 
Abstract
:1. Introduction
- i.
- The proposal of a control structure combining TD-TI controllers for LFC of the hybrid two-area interconnected power systems.
- ii.
- The proposal of a novel technique known as QCGO via improving the quantum mechanics of the CGO algorithm based on the particle swarm optimizer (PSO) to improve the exploration and exploitation strategies of the main CGO algorithm.
- iii.
- The application of the improved CGO to select the optimal parameters of the proposed controller structure.
- iv.
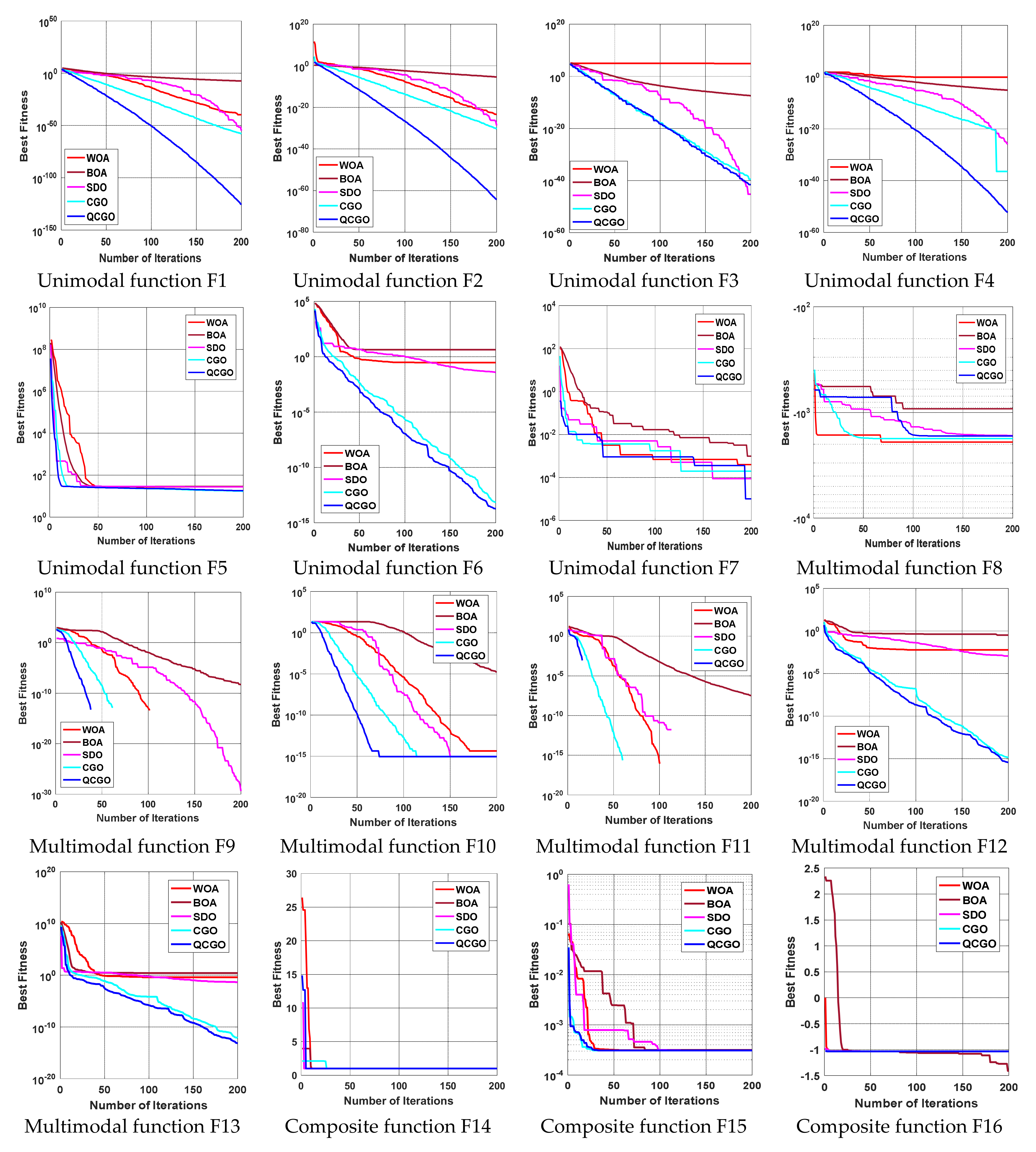
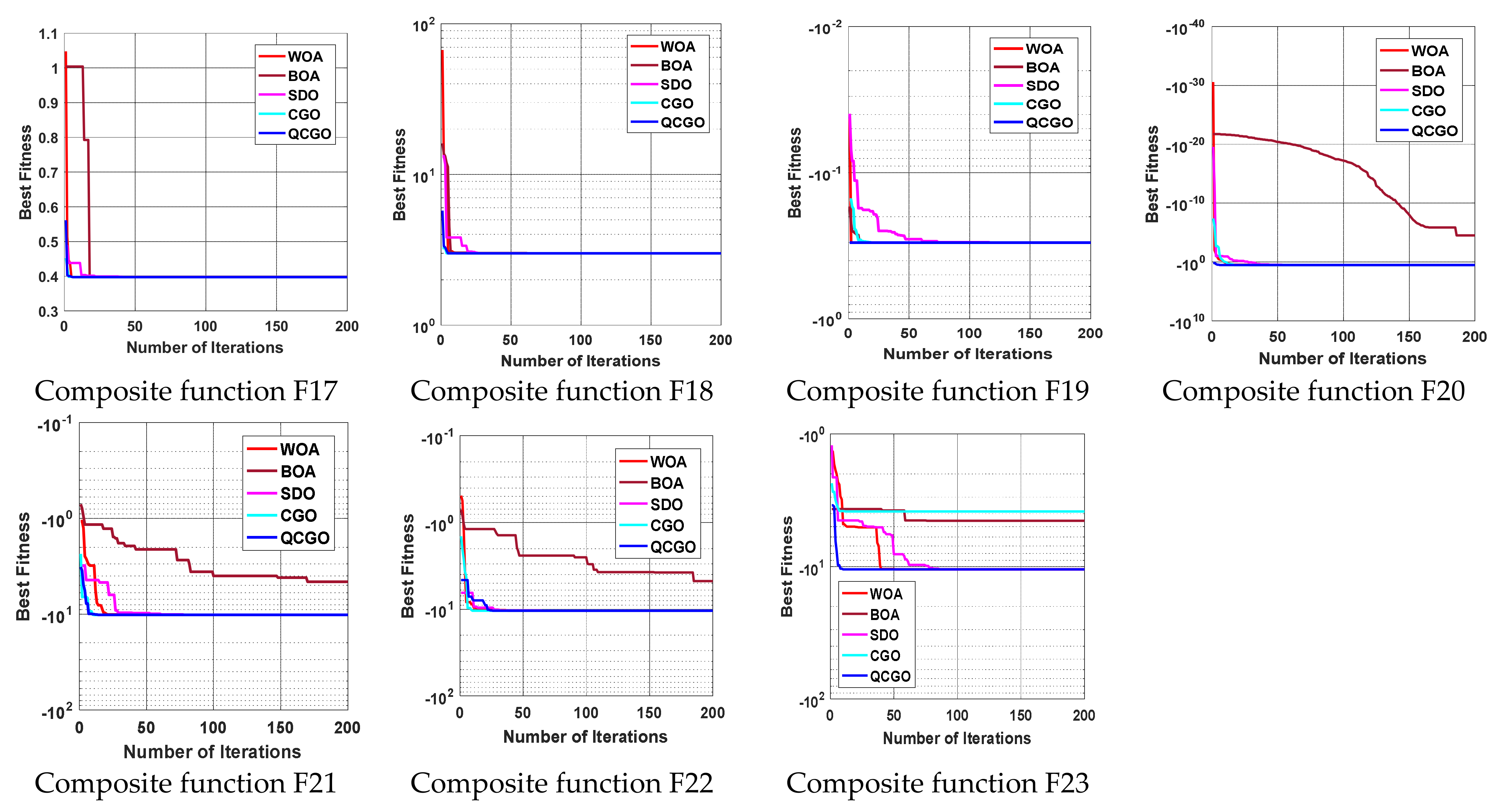
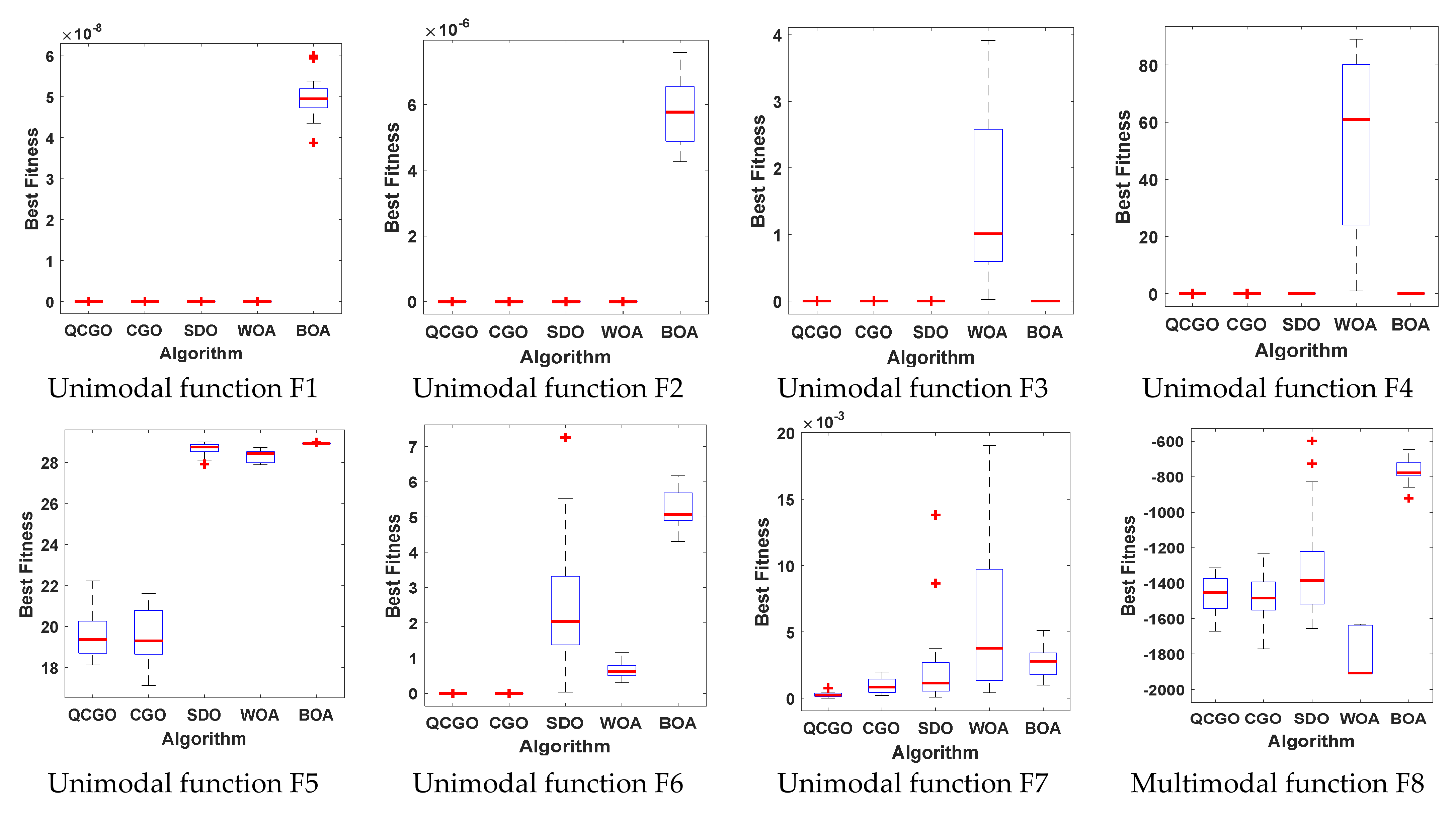
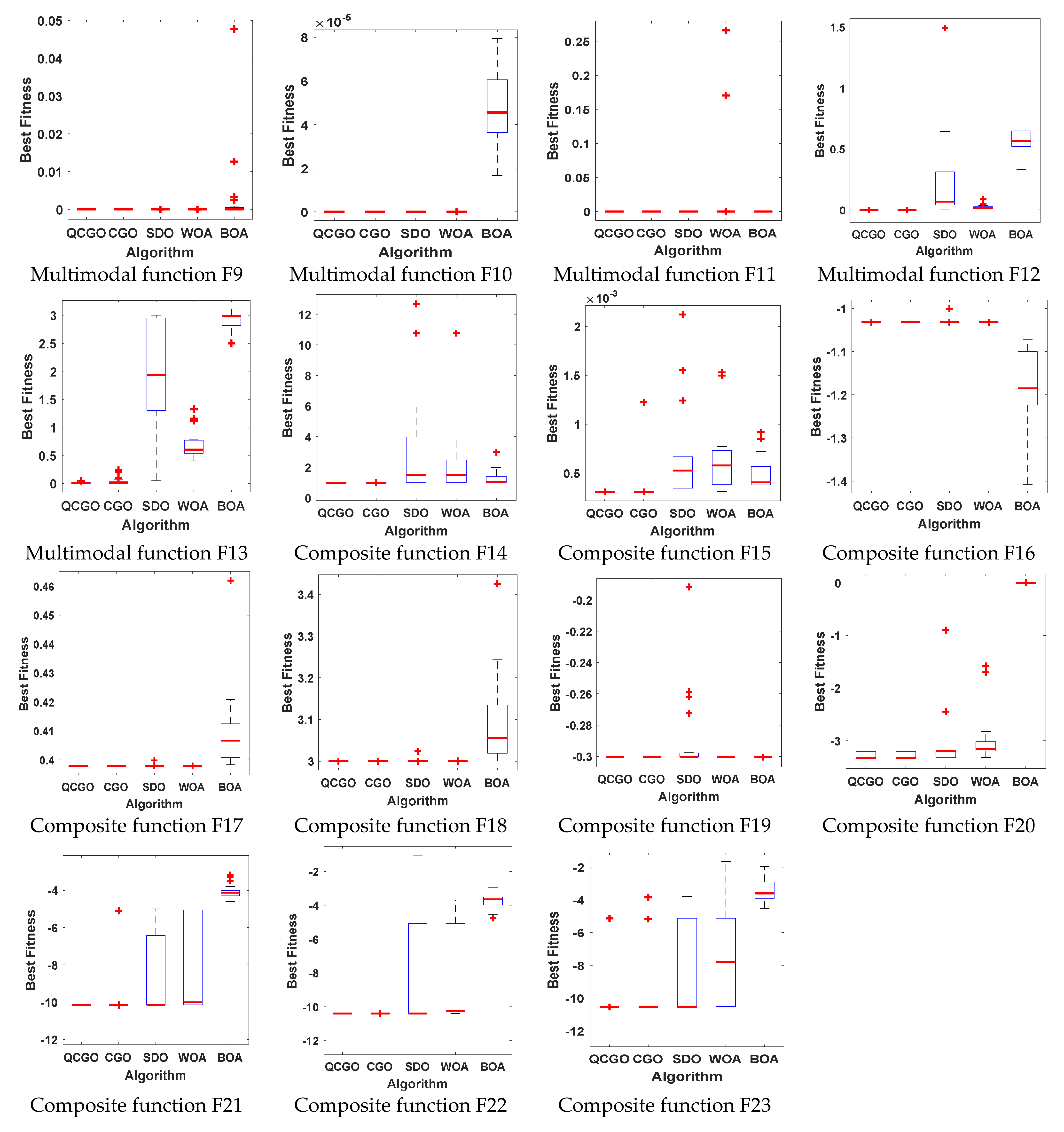
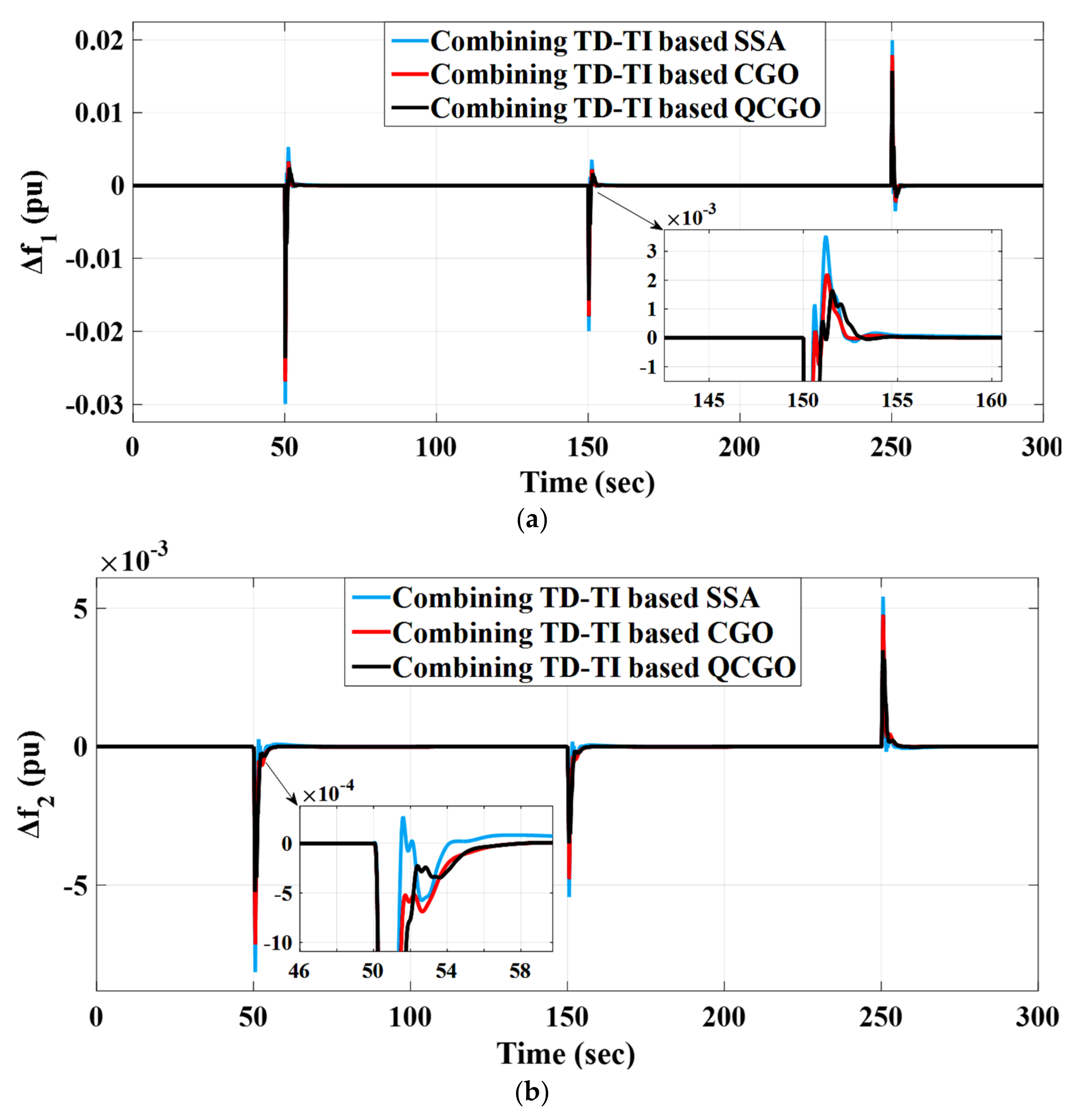
- The validation of the performance of the proposed algorithm through a fair-maiden comparison between the proposed QCGO algorithm and other previous techniques (i.e., Supply-demand-based optimization (SDO), WOA, butterfly optimization algorithm (BOA), and the conventional CGO), based on applying 23 bench functions, as well as a fair comparison between the proposed algorithm and other previous algorithms (i.e., CGO, SSA), considering the proposed controller in the multi-area power grid for frequency stability analysis.
- v.
- The consideration of several challenges, such as the high RESs penetration in both areas, different load perturbation types, and communication time delay to study the system stability state.
- vi.
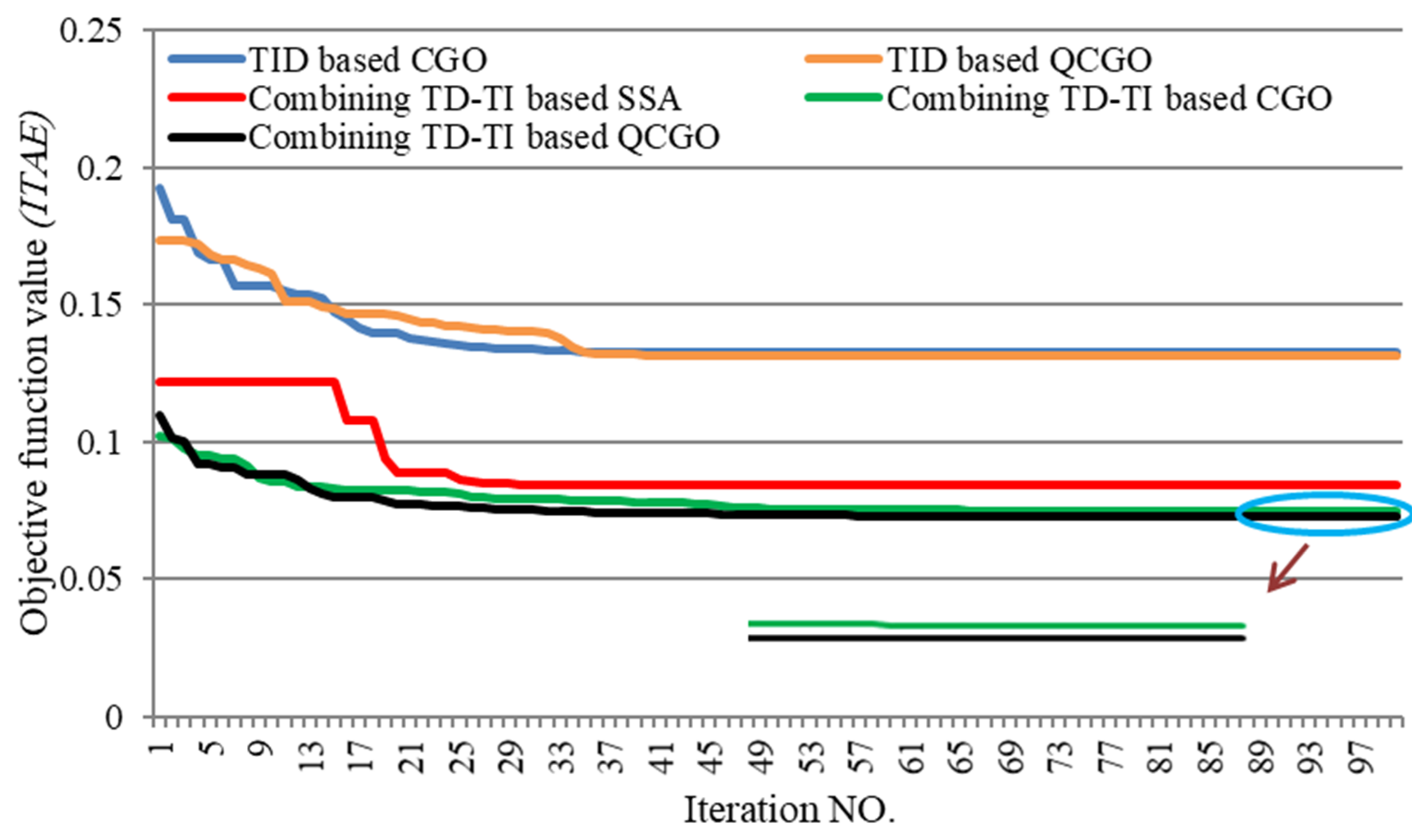
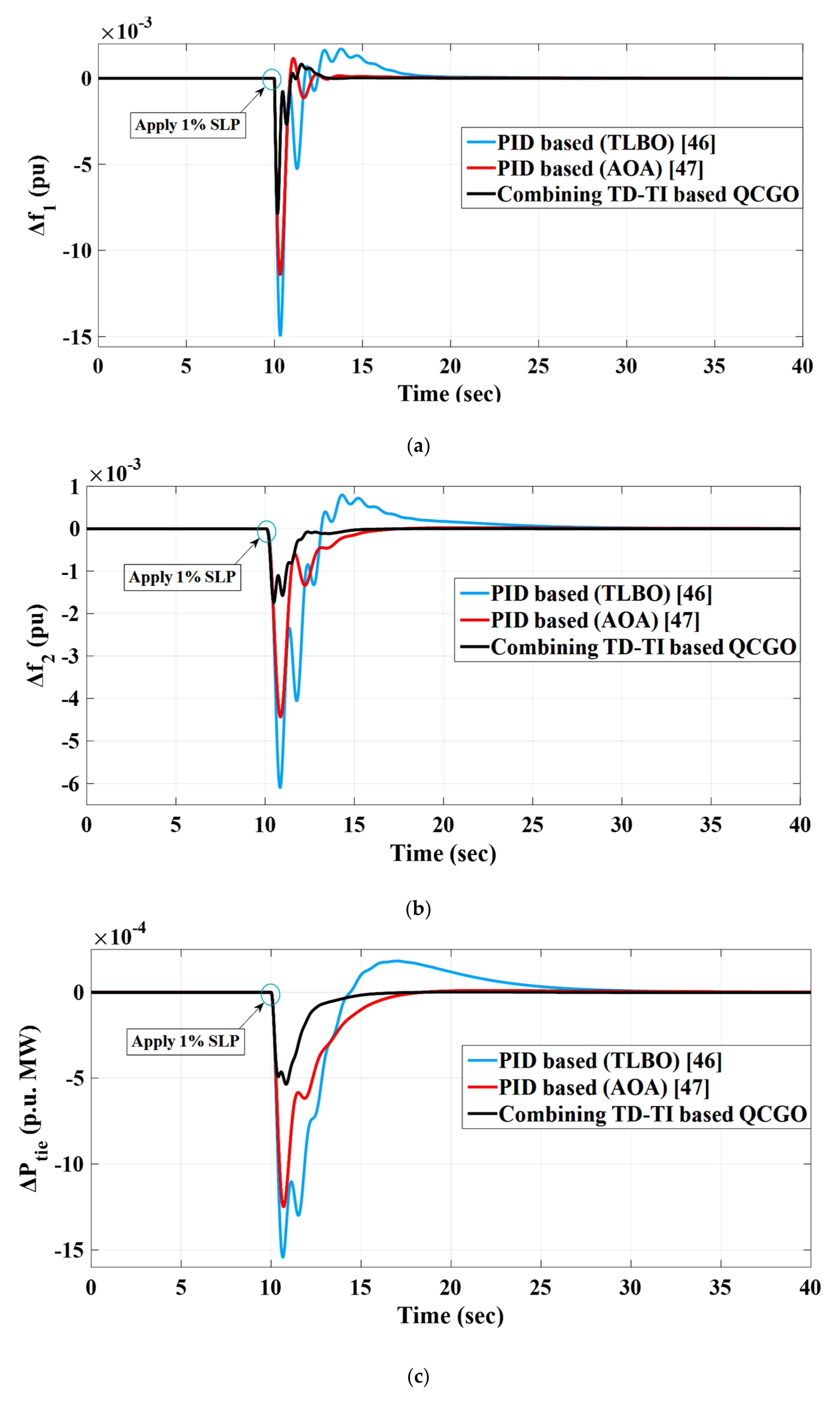
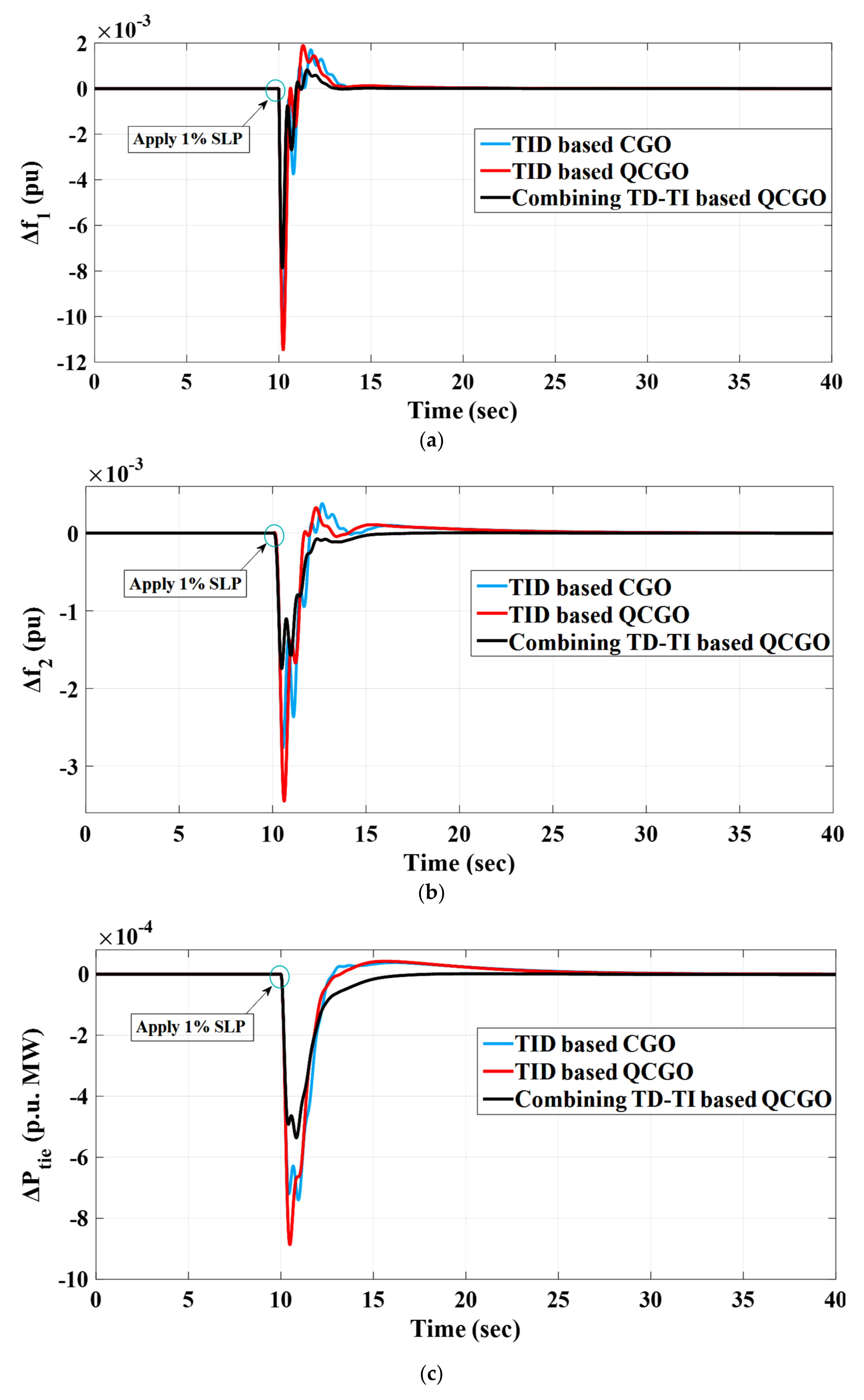
- The comparison of the performance of the proposed control TD-TI structure based on QCGO with other available controllers, such as the PID-based teaching learning-based optimization (TLBO) [46]; the PID-based arithmetic optimization algorithm (AOA) [47]; the proposed TD-TI control structure based on CGO; the proposed TD-TI control structure based on SSA; the TID controller based on CGO; and the TID controller based on QCGO, is presented to ensure the effectiveness and robustness of the proposed control structure based on the QCGO algorithm in achieving more system reliability and stability.
- vii.
- The consideration of the integration of electrical vehicles (EVs) in both areas to support the proposed controller in overcoming the system frequency excursions during high renewables penetration.
2. The Studied System Topology
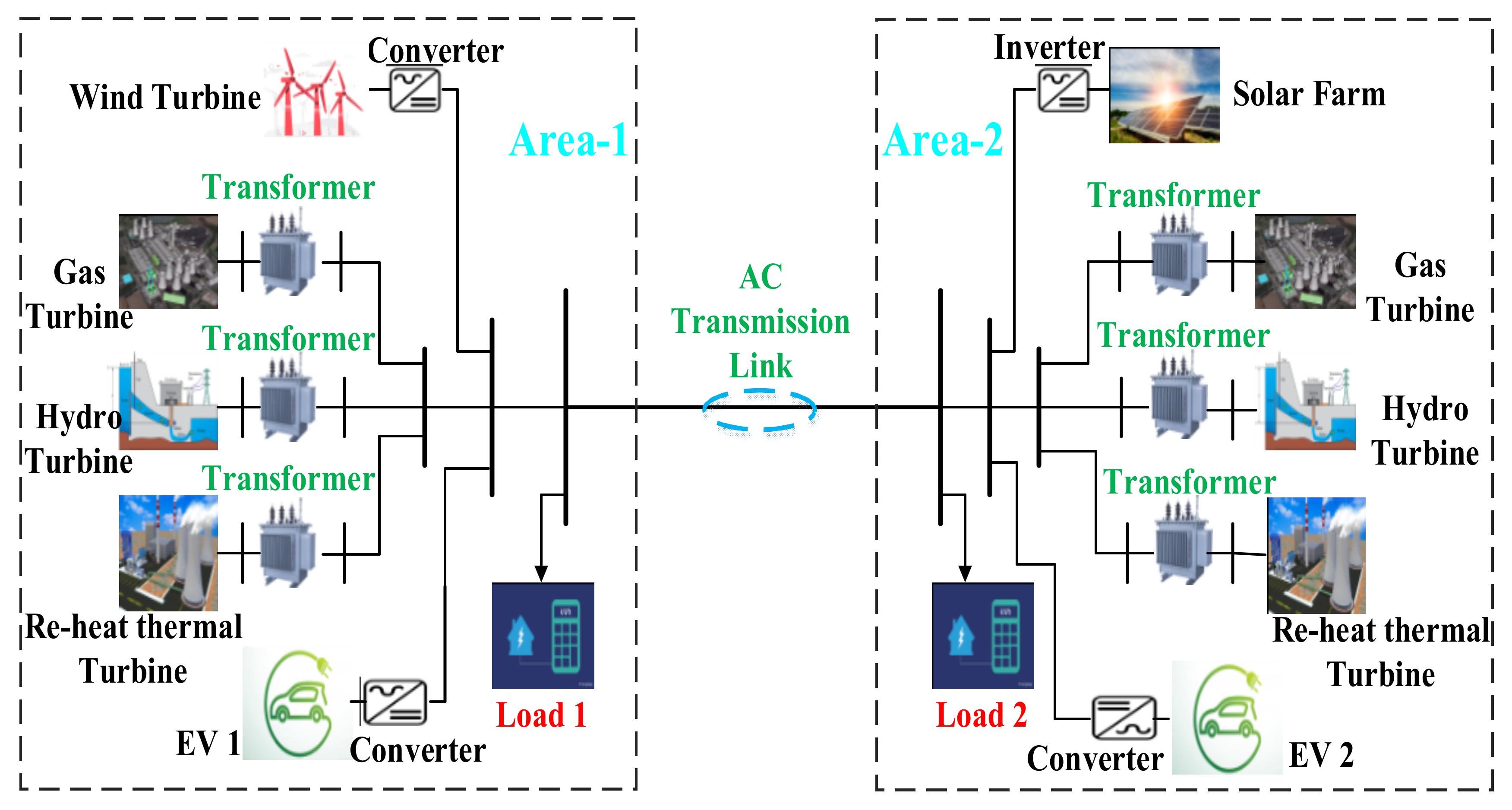
2.1. Two-Area Interconnected Hybrid Power Grid Configuration
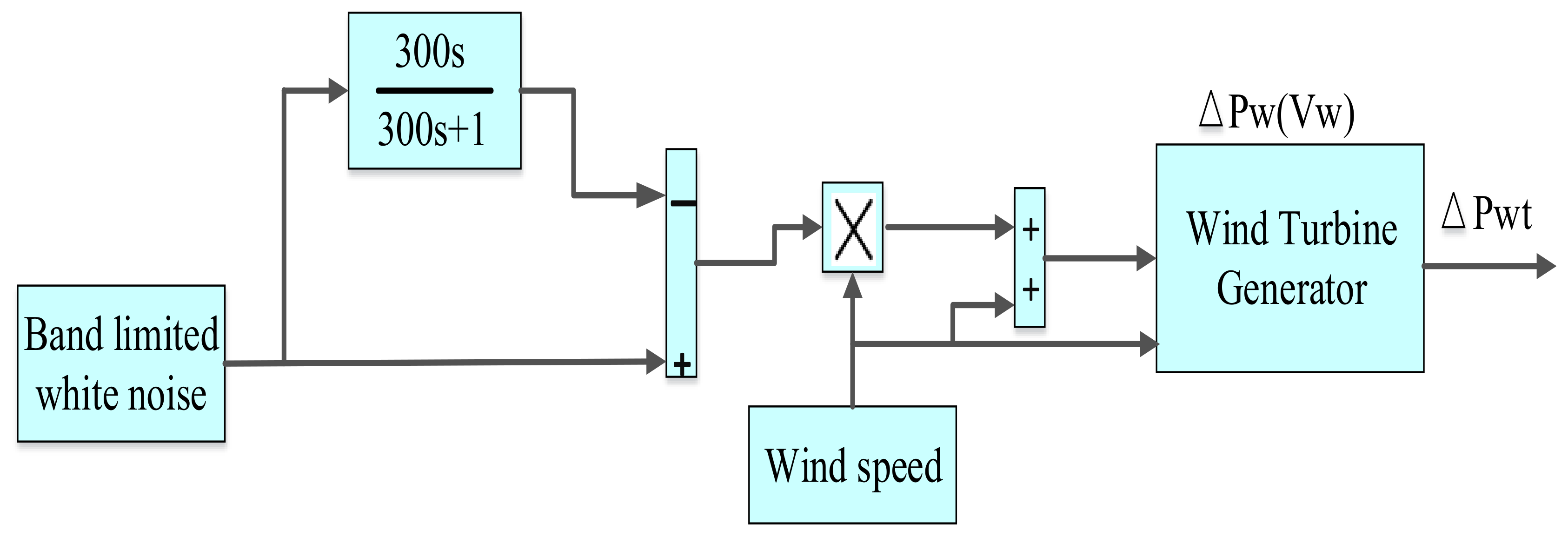
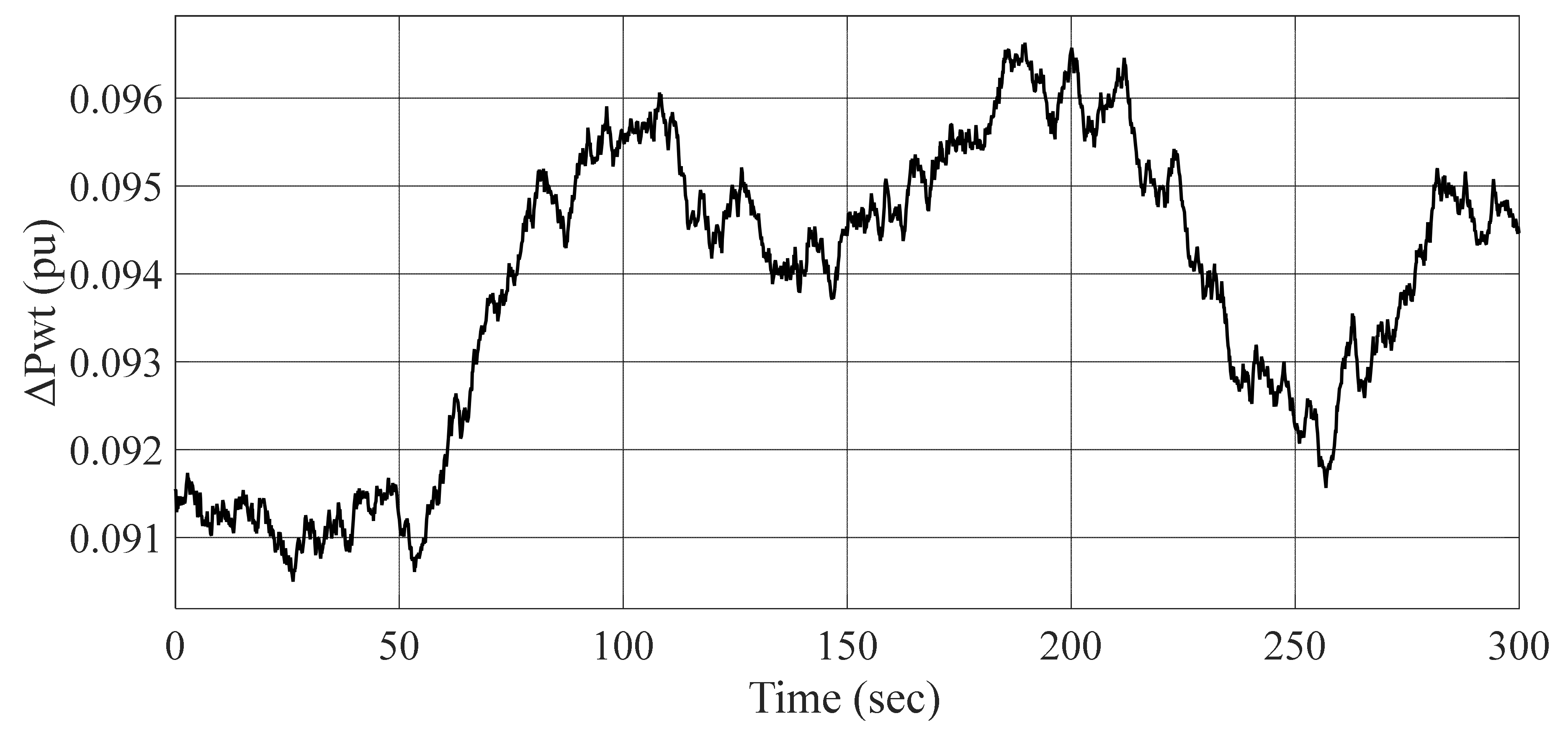
2.2. The Installation of Wind Farm Model
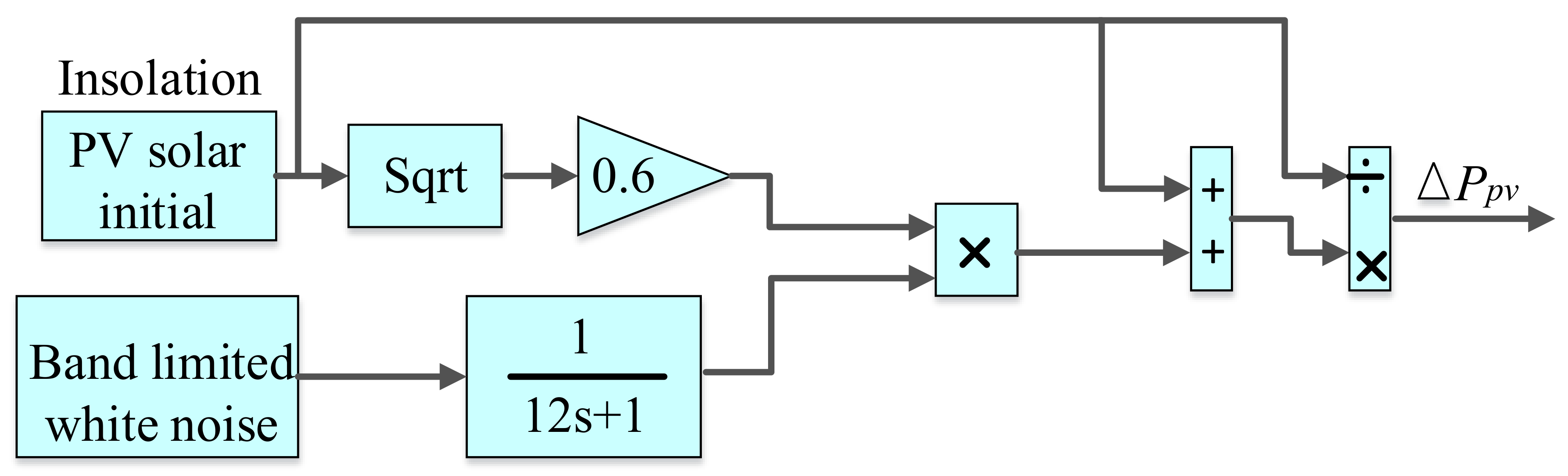
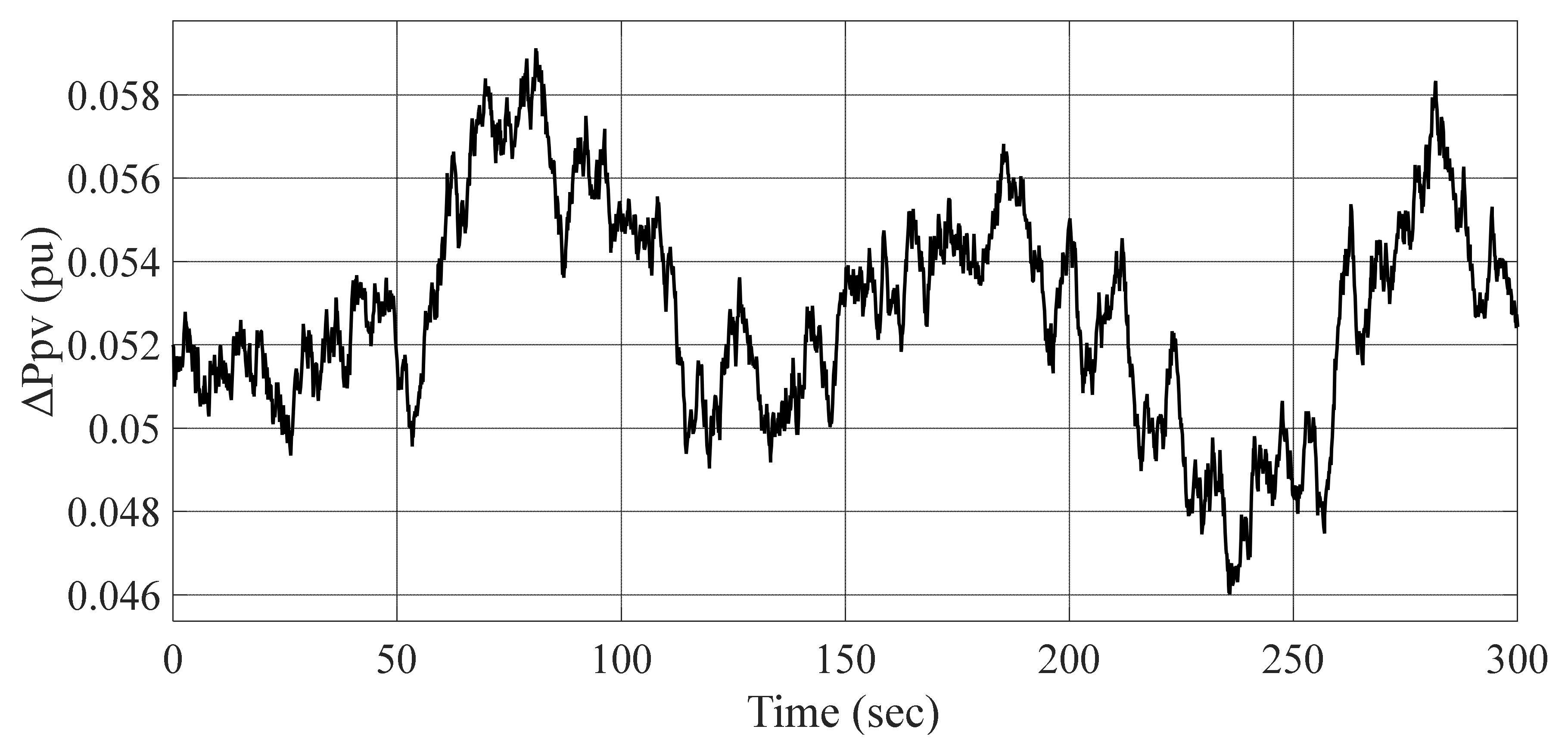
2.3. The Installation of the PV Model
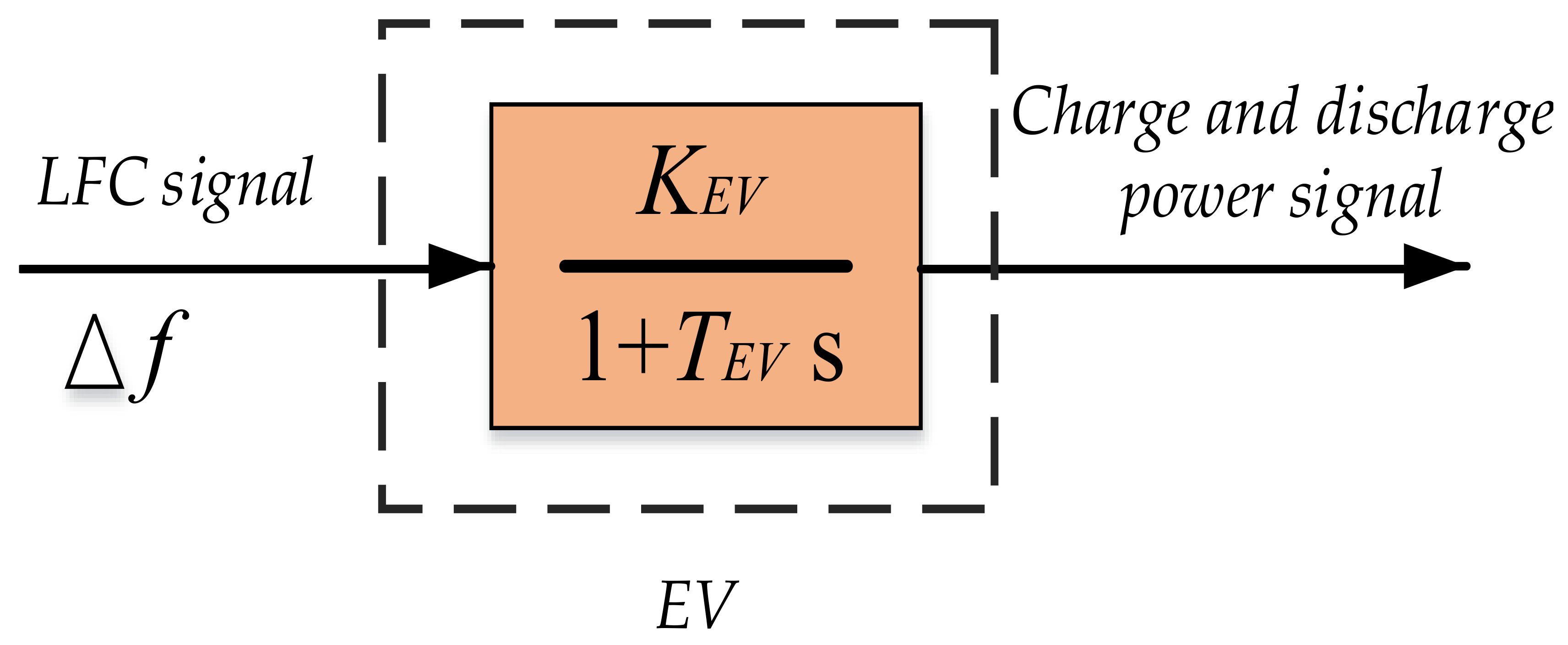
2.4. The Installation of EV Model
3. Control Methodology and Problem Formulation
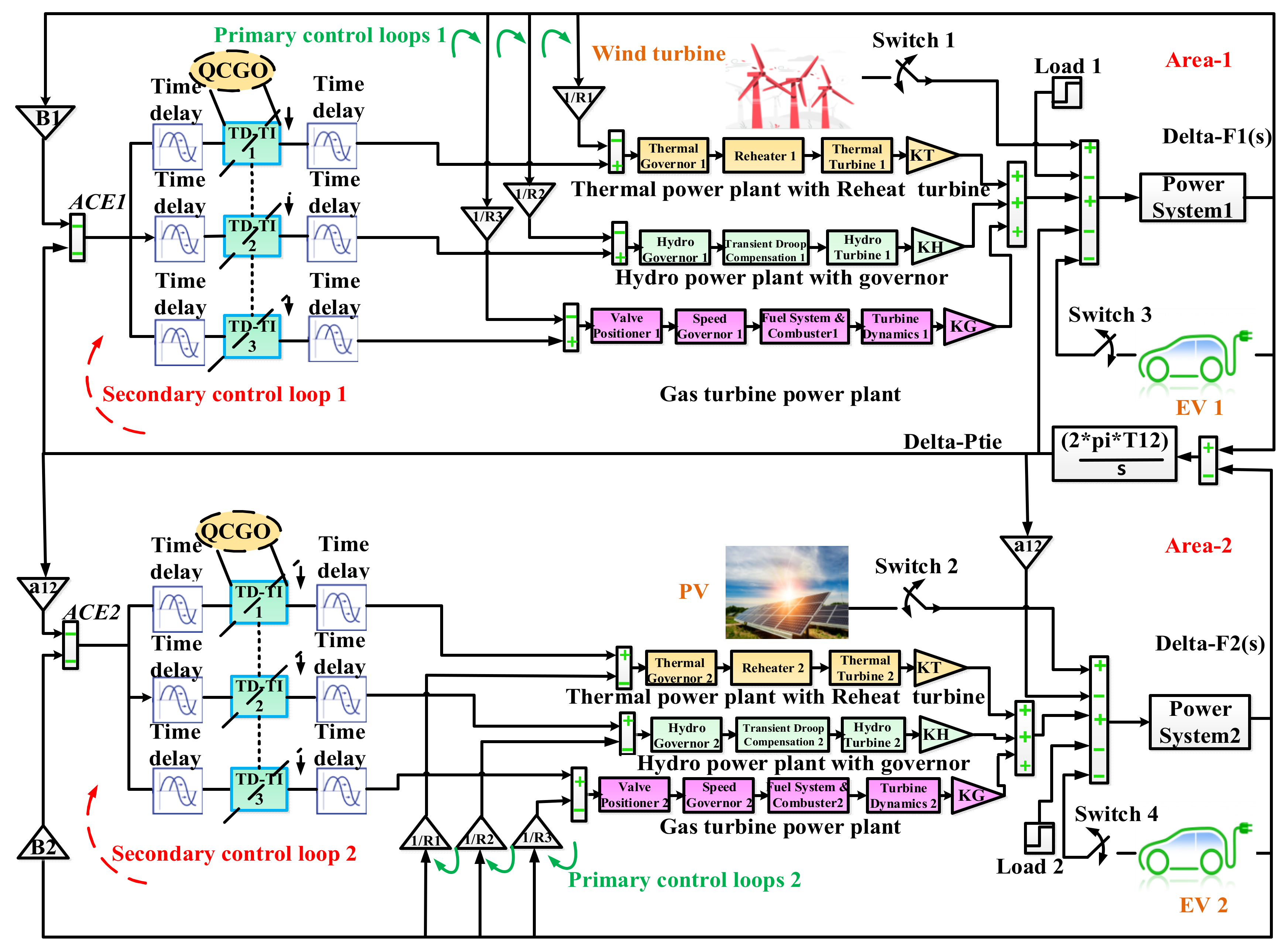
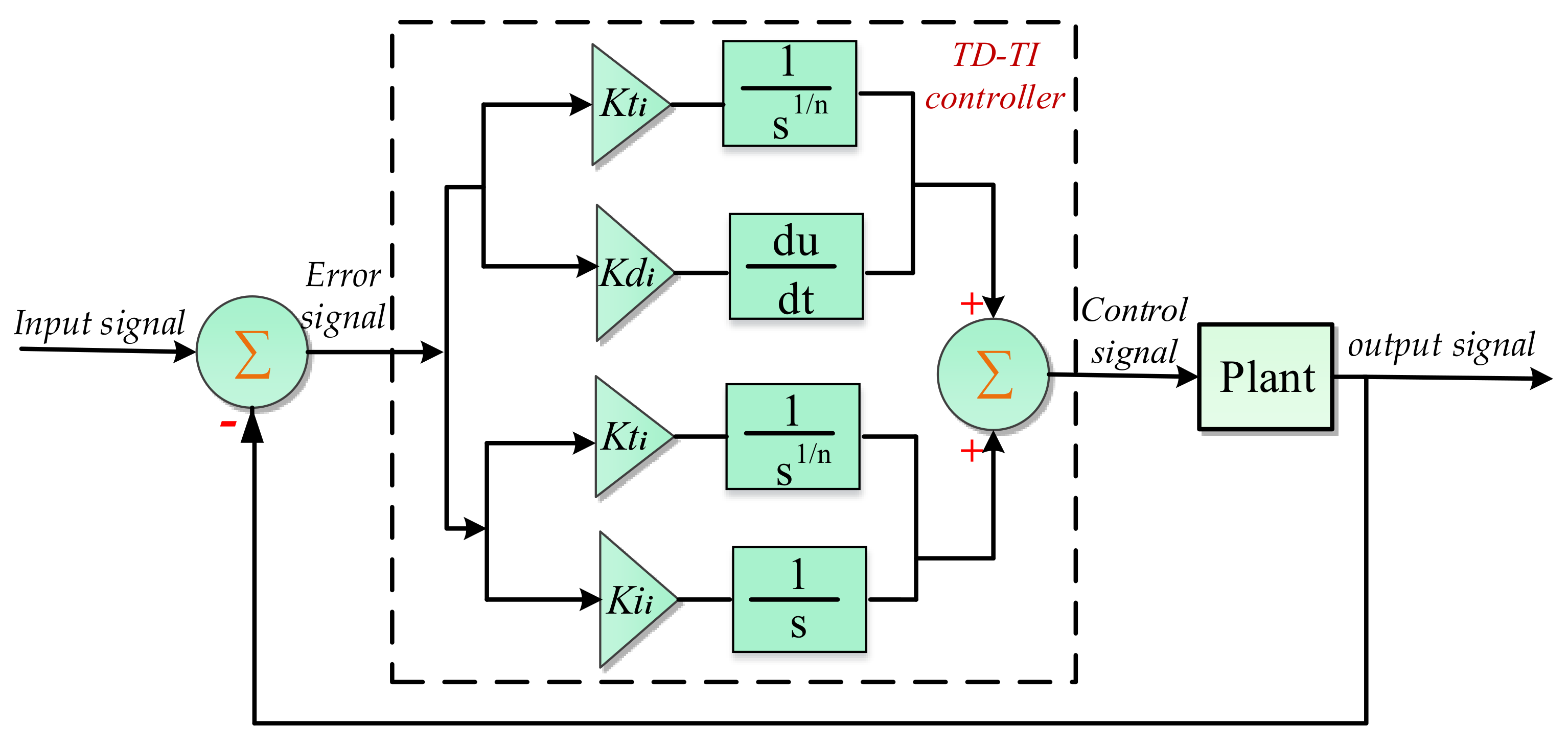
3.1. The Proposed Control Strategy
3.2. The Proposed Optimization Technique
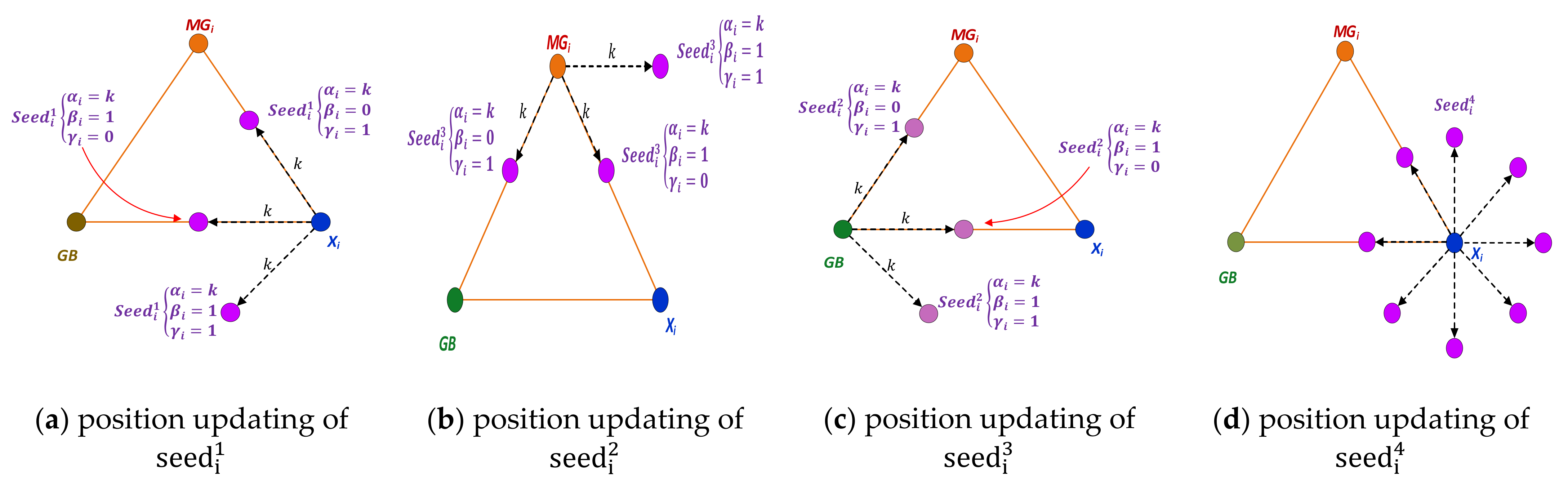
3.2.1. Chaos Game Optimization (CGO) Algorithm
3.2.2. The Proposed Quantum Chaos Game Optimization (QCGO) Algorithm
4. The Procedure of the Improved QCGO Algorithm
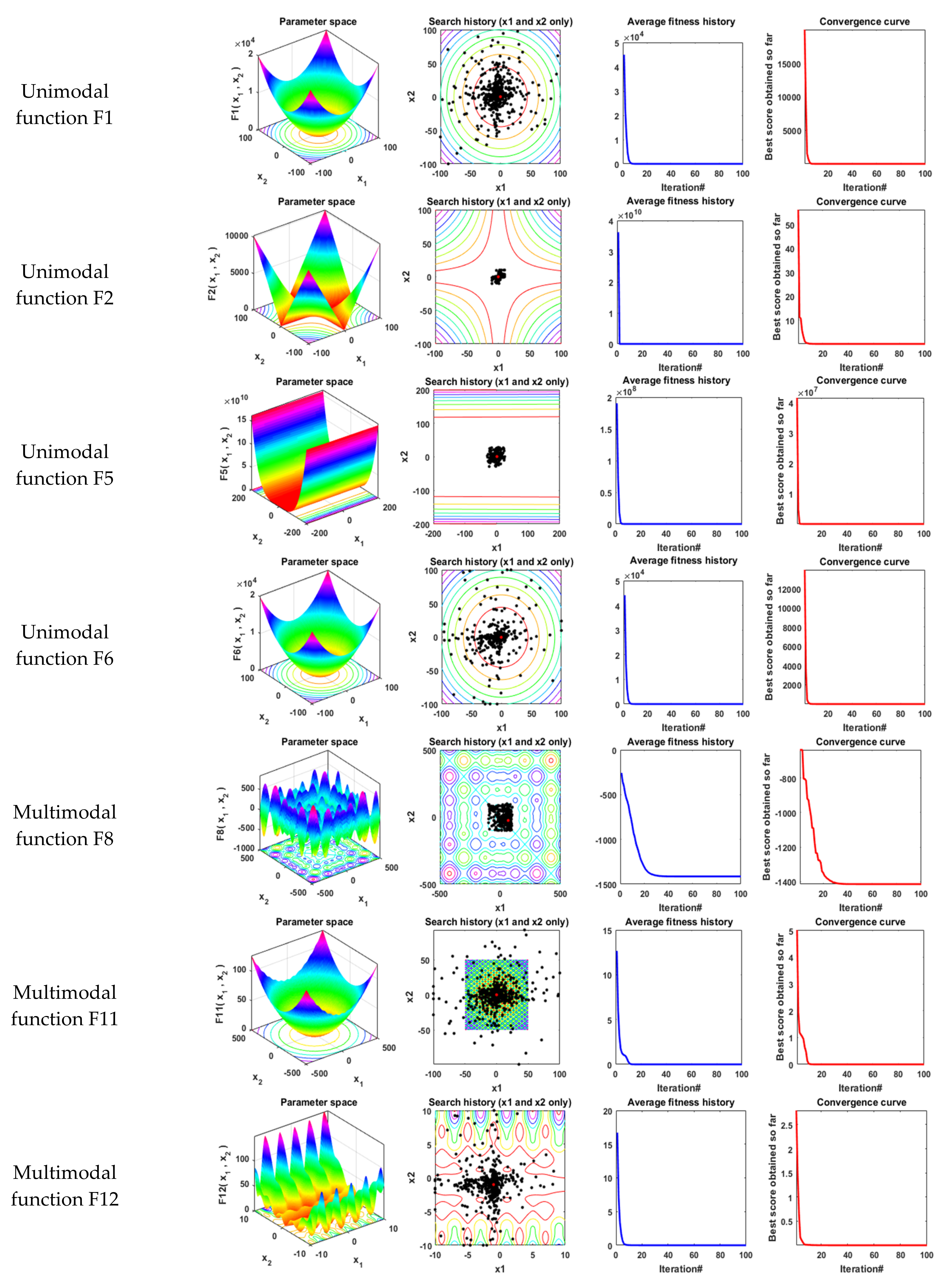
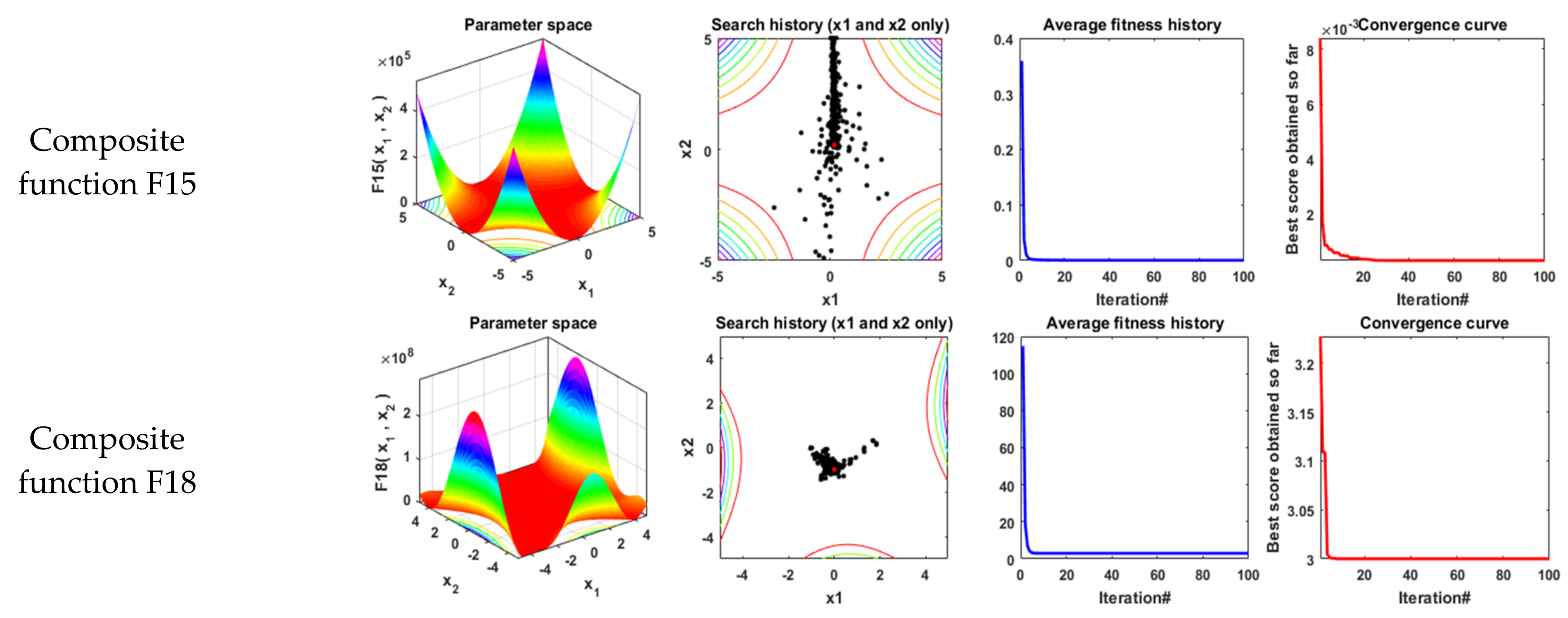
The Performance of QCGO
5. Simulation Results and Discussions
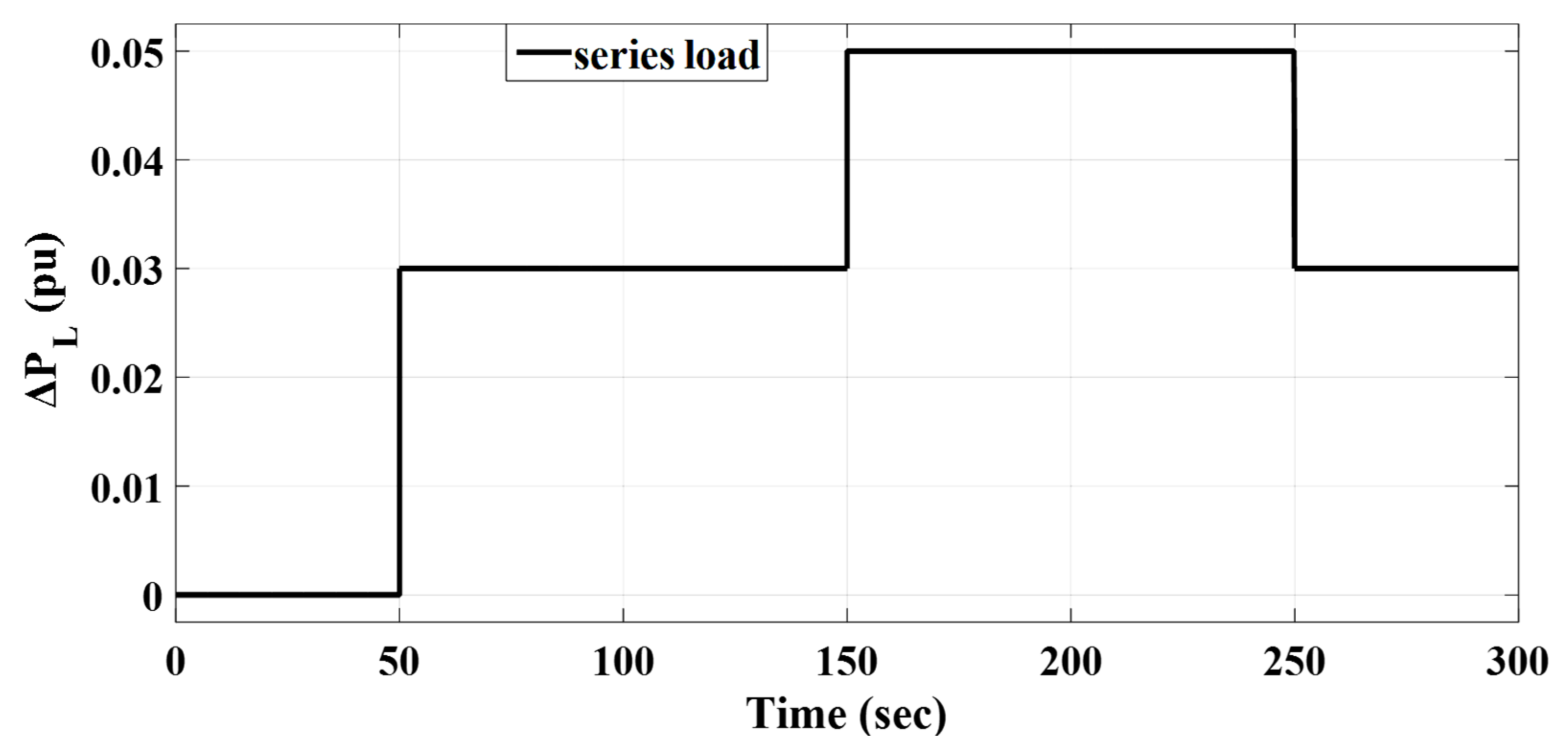
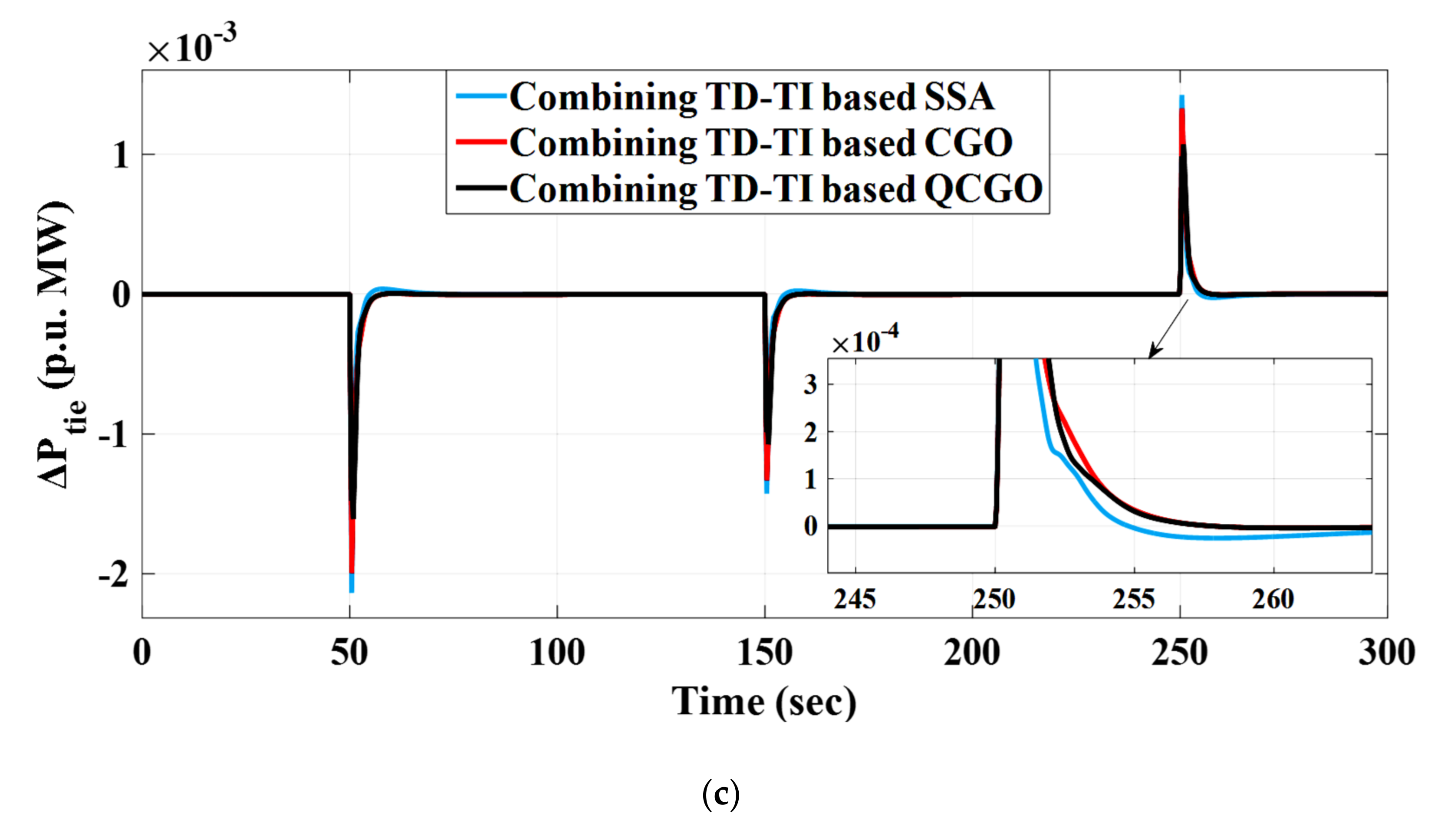
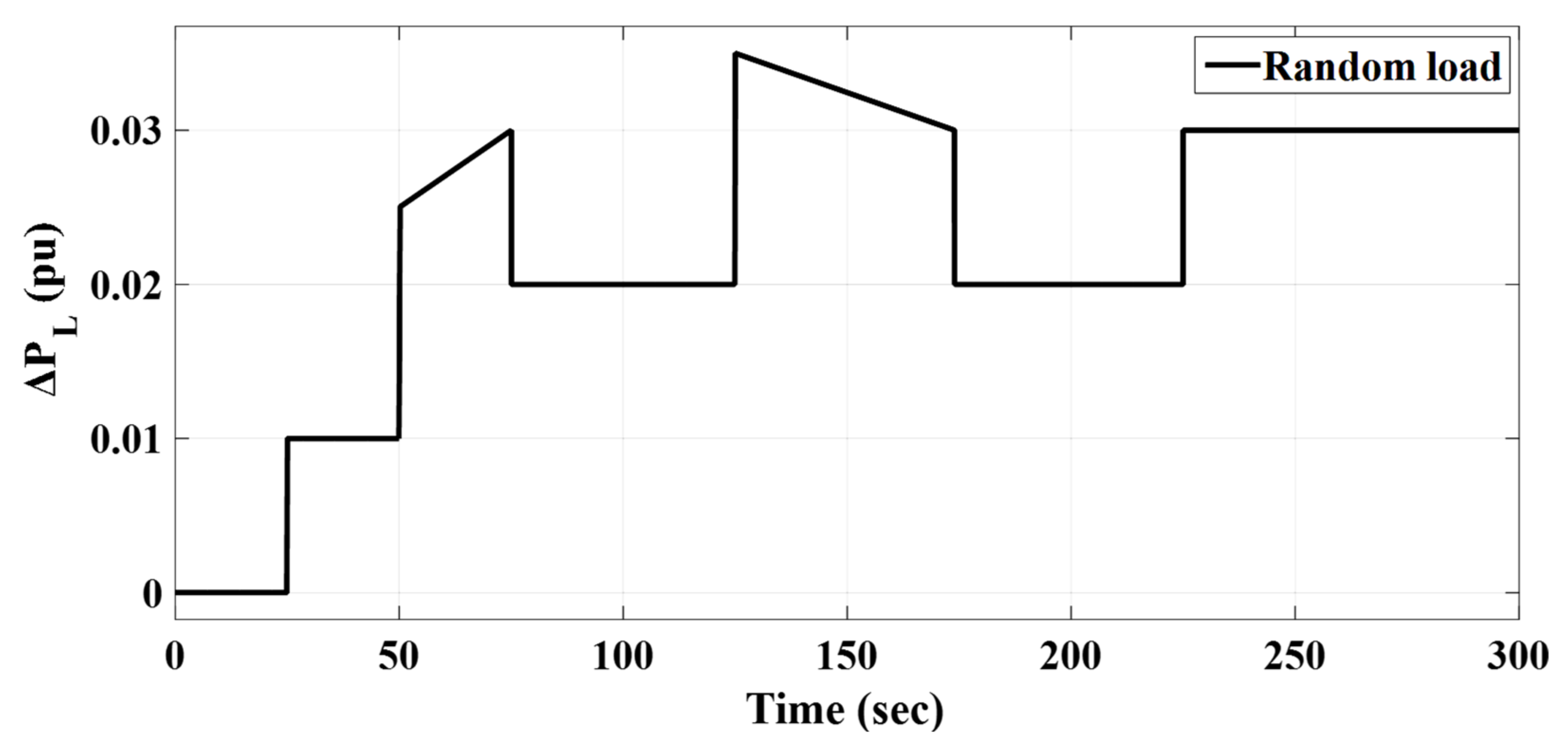
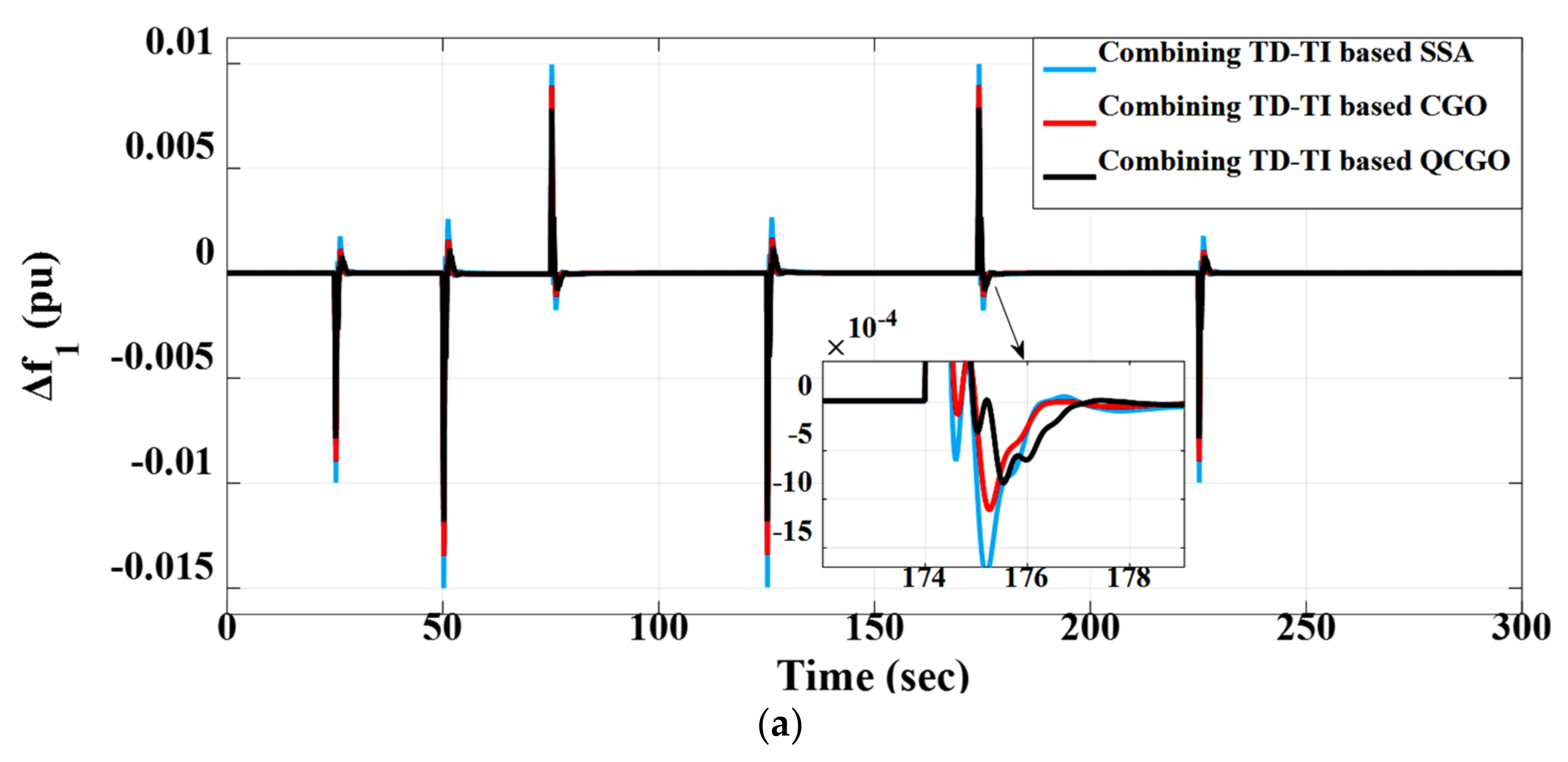
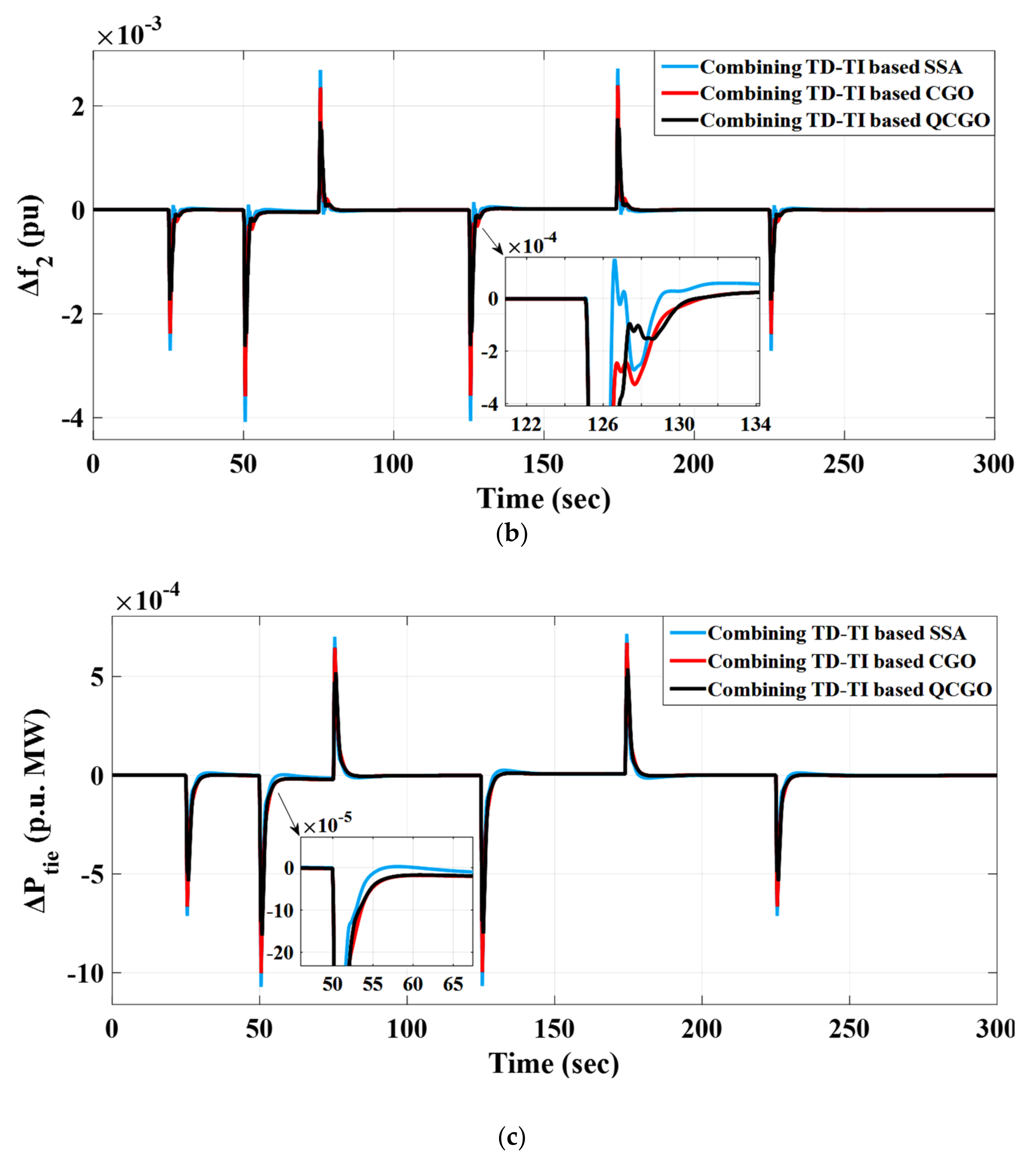
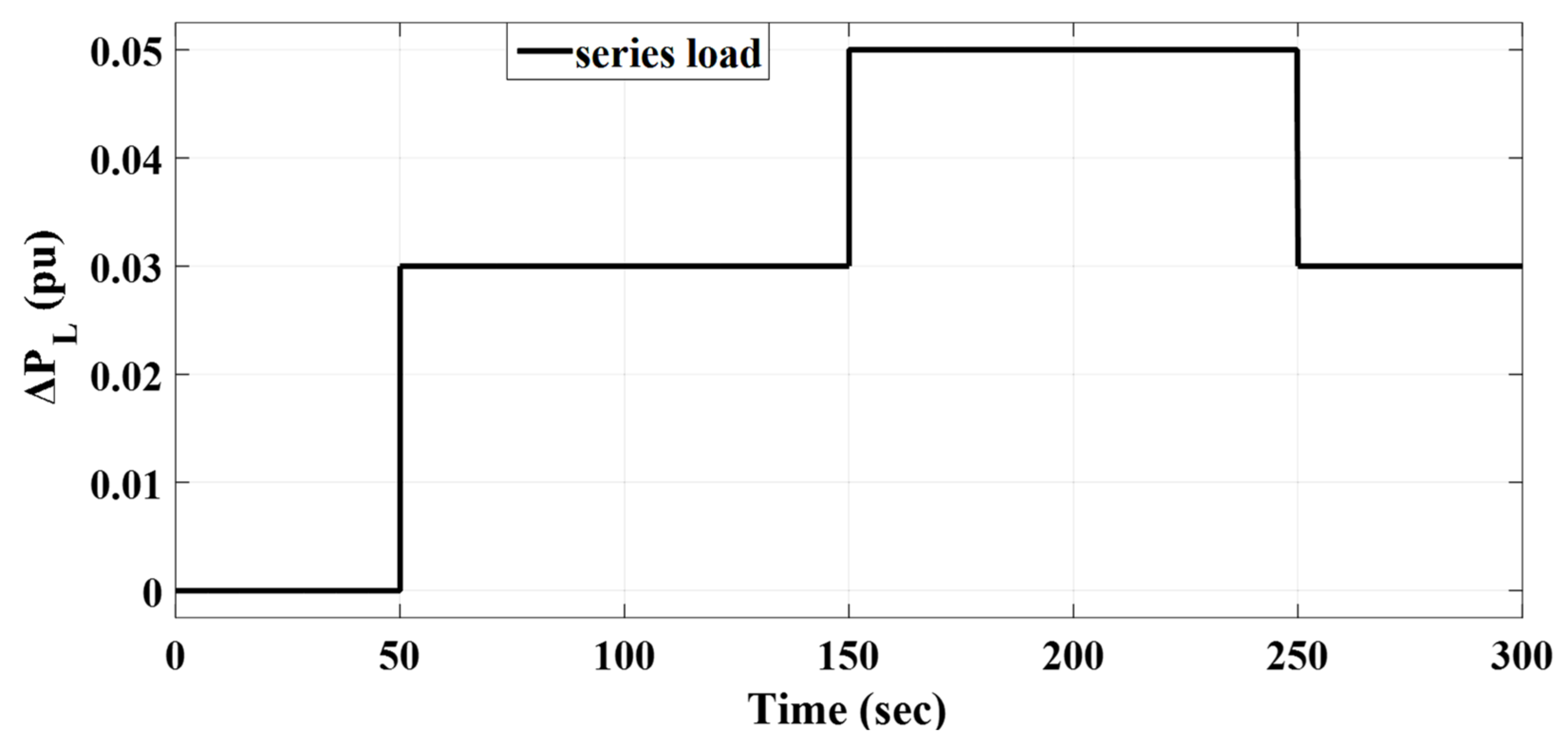
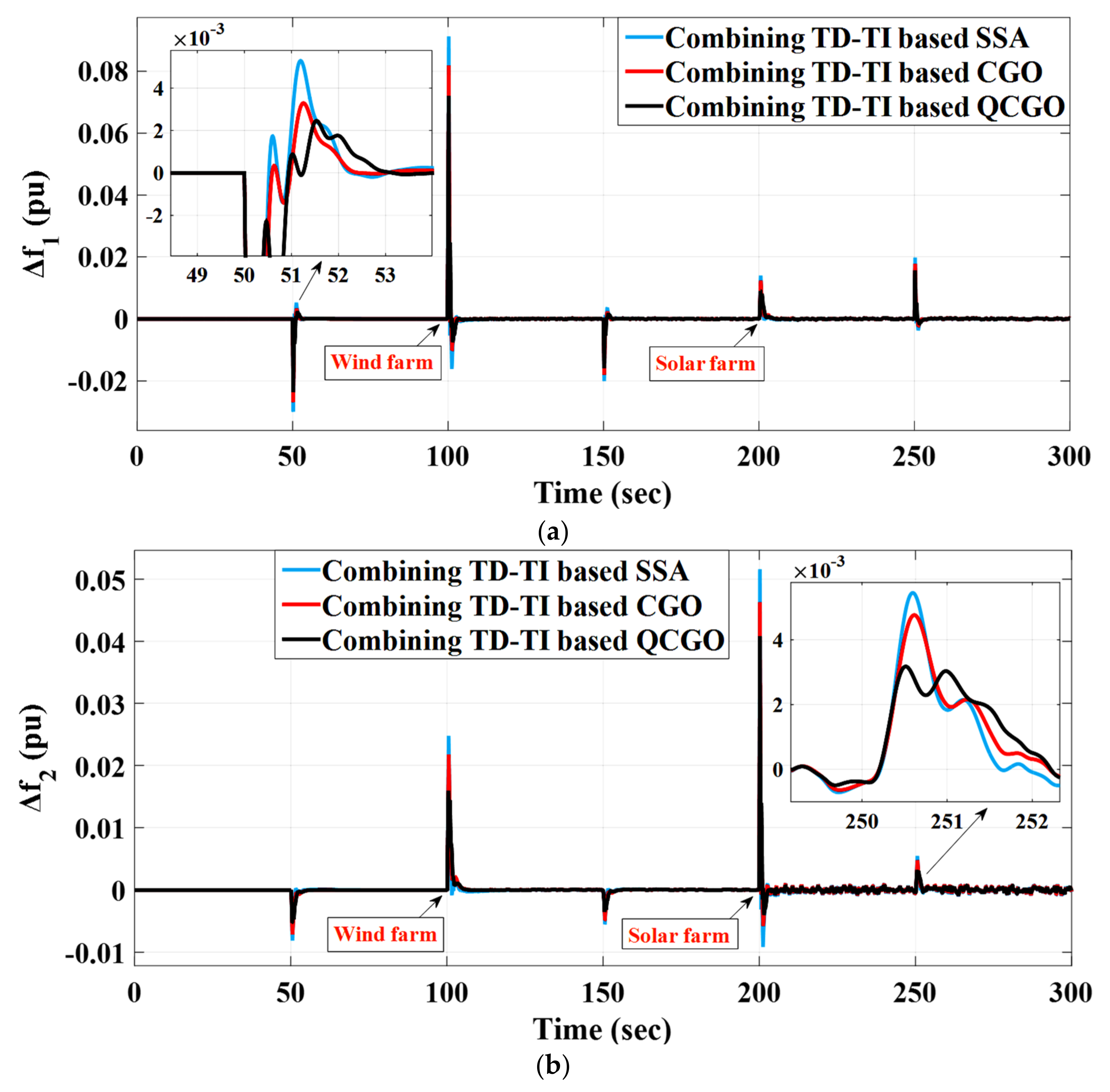
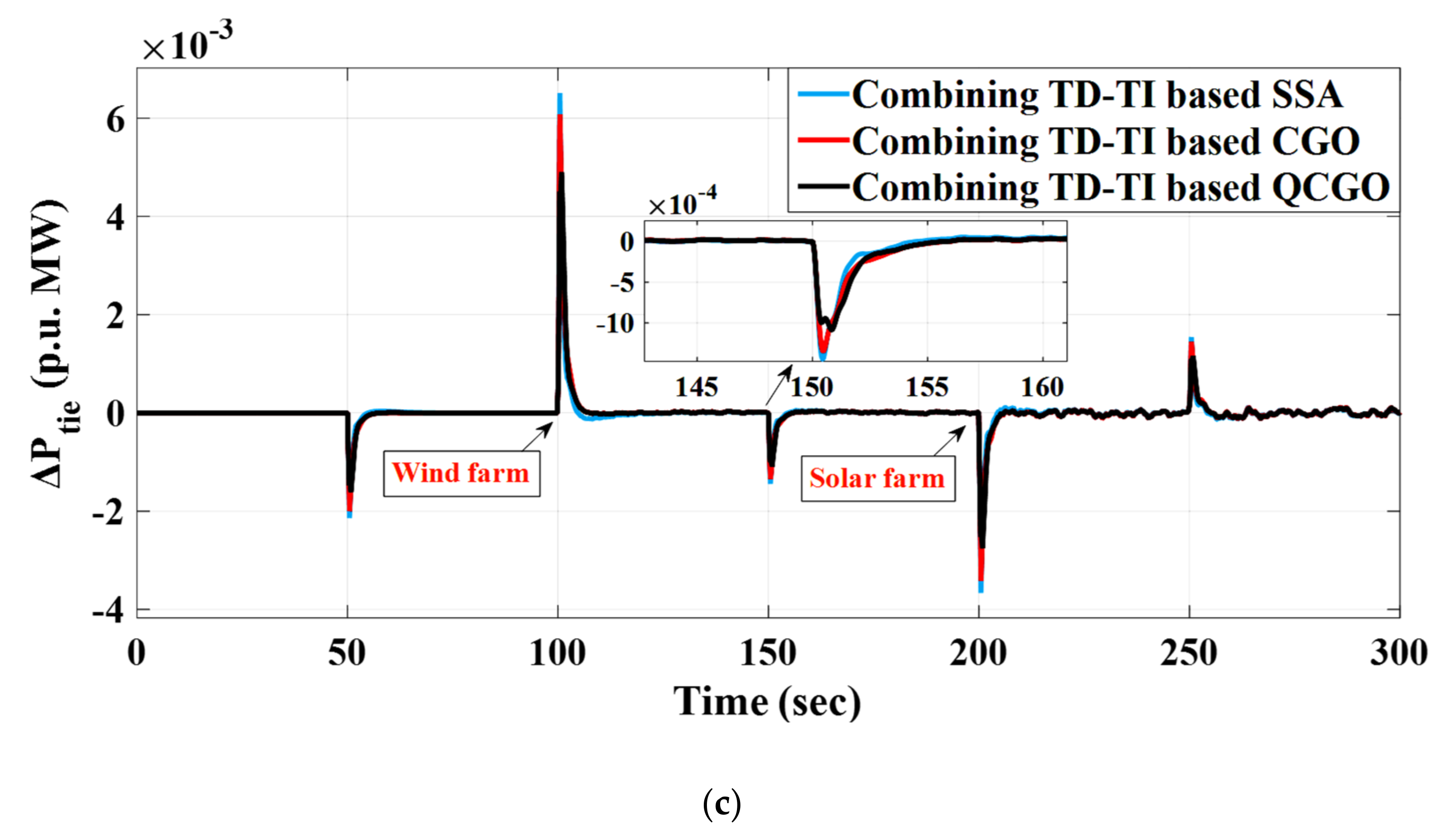
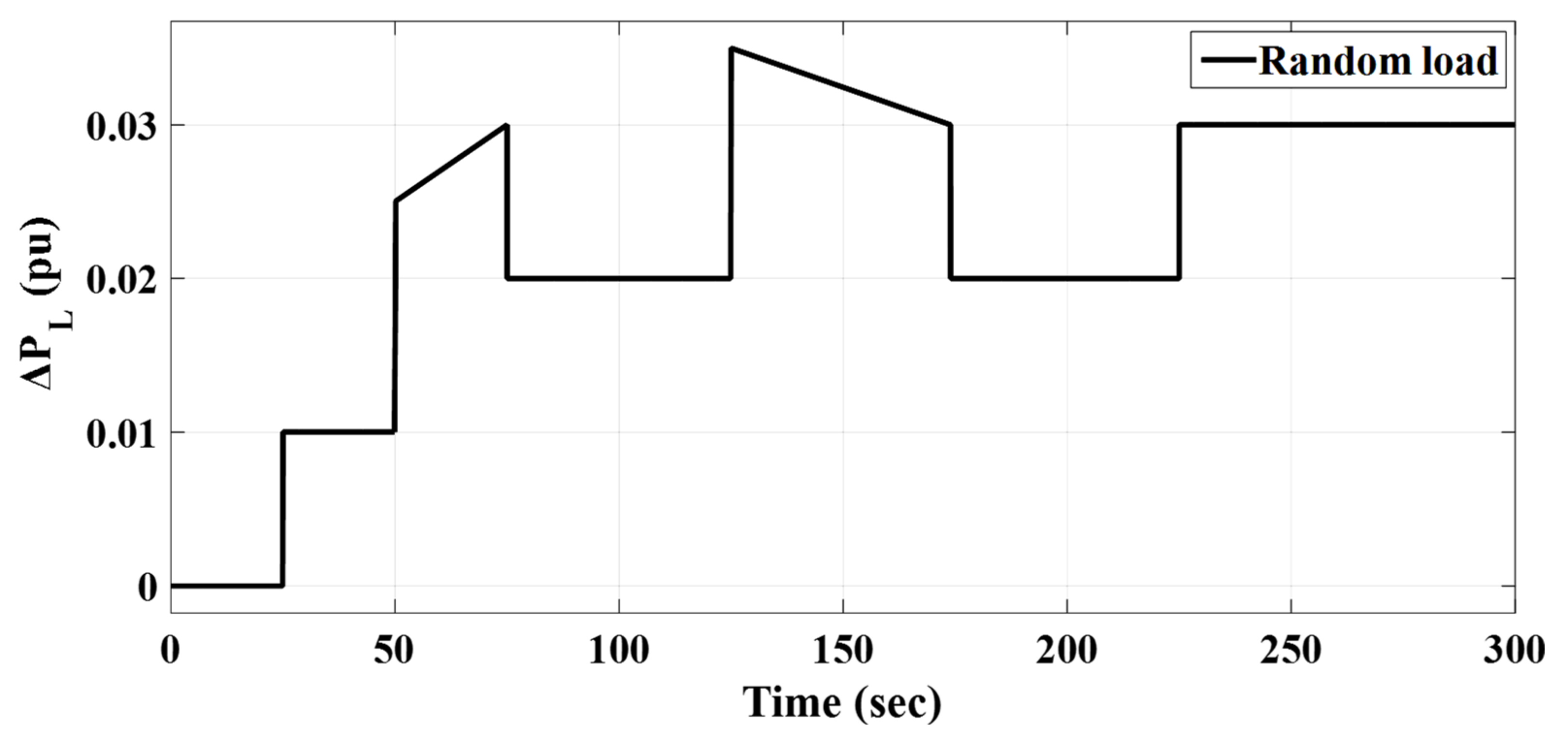
- Scenario A: evaluation of the studied power grid performance considering various load variation types (i.e., SLP, series SLP, and RLV).
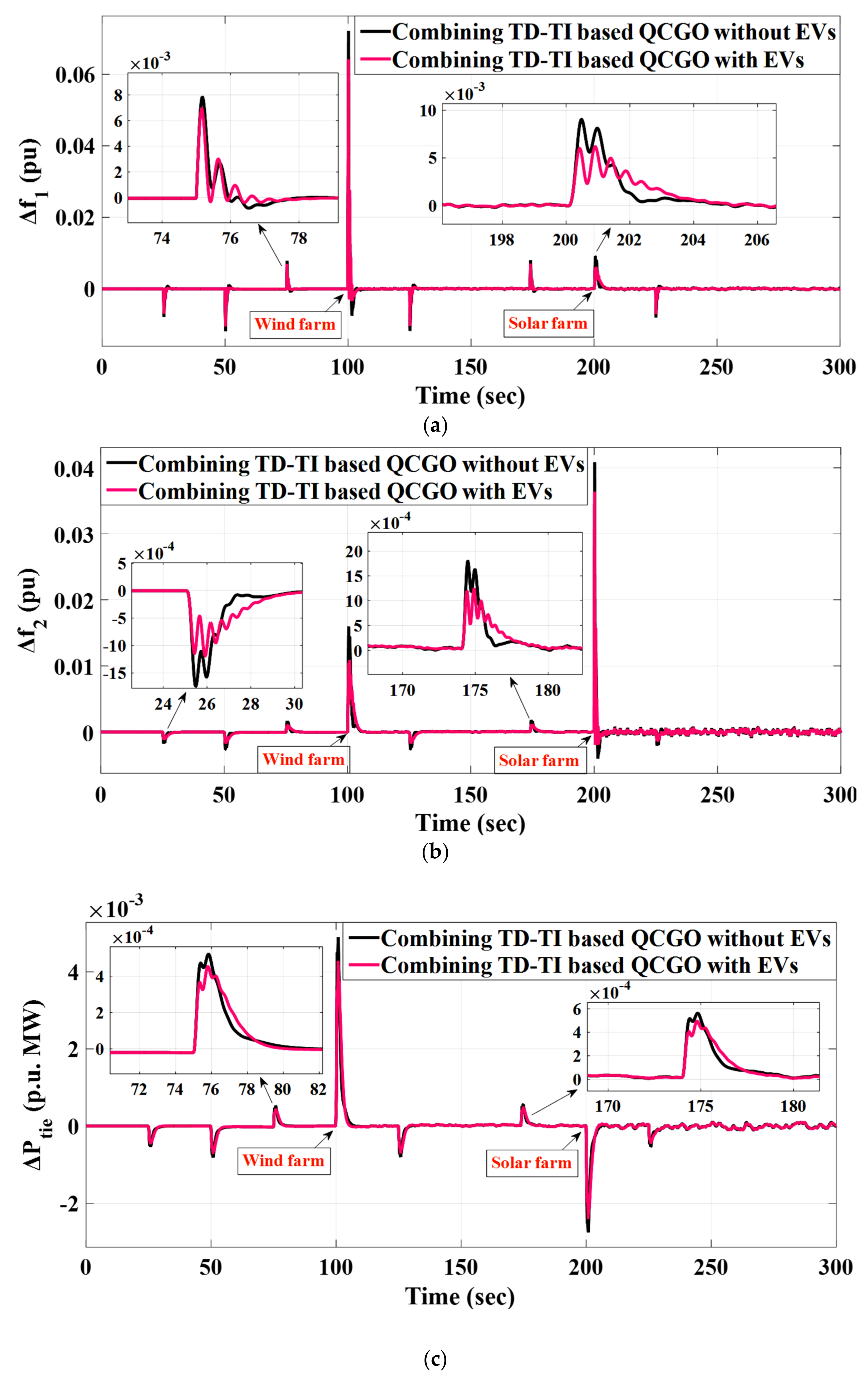
- Scenario B: evaluation of the studied power grid performance considering high penetration of RESs in both areas with series SLP and RLV.
- Scenario C: evaluation of the studied power grid performance considering communication time delay.
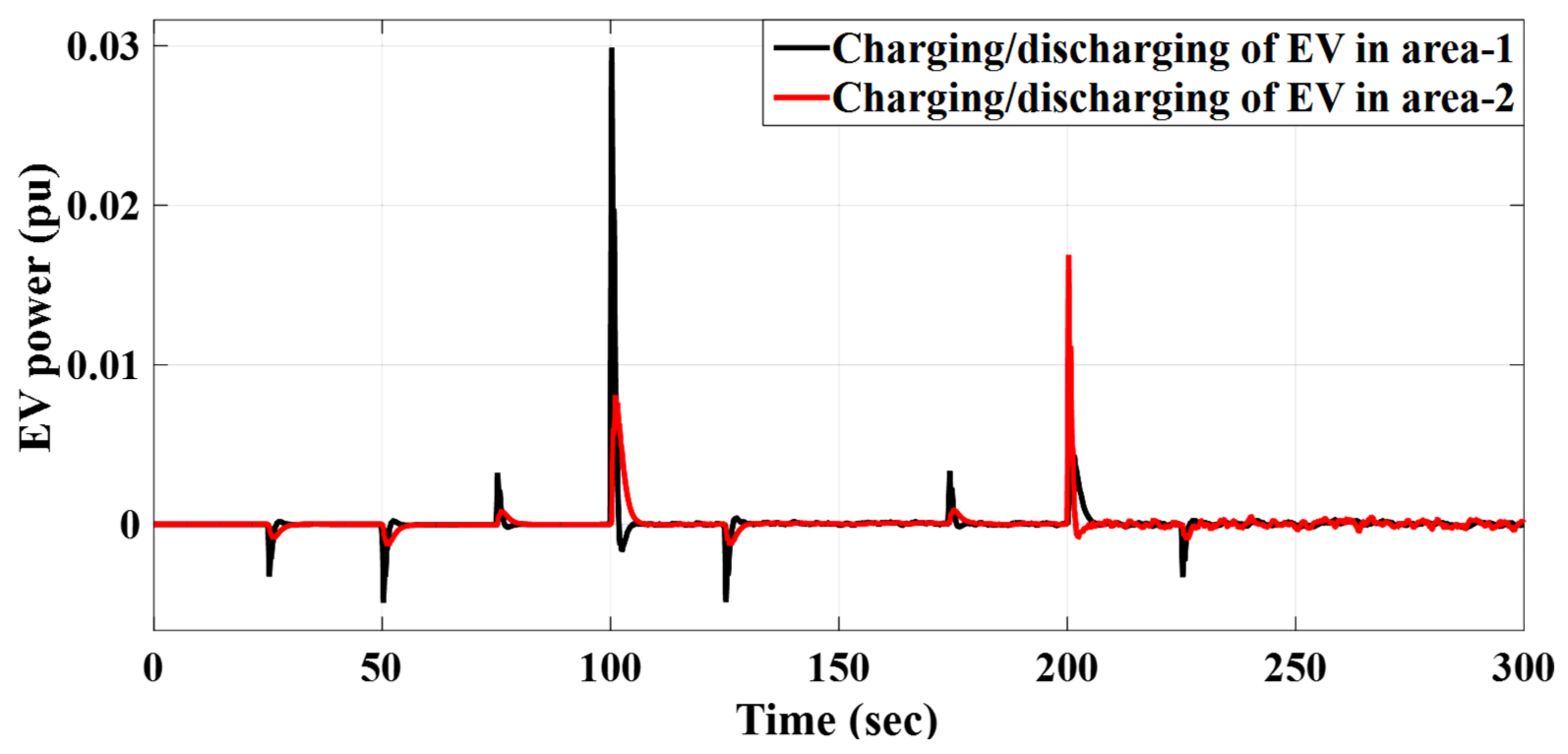
- Scenario D: evaluation of the studied power grid performance considering EV integration in both areas.
6. Conclusions
- A new control structure was proposed based on the TID controller labeled as a combining TD-TI controller for frequency stabilizing in the power grid.
- A multi-area interconnected hybrid power system that includes several traditional units (i.e., thermal, hydro, and gas) has been presented in this work to test the efficacy of the combining TD-TI controller.
- An improved algorithm was proposed named QCGO to develop the searching strategy of the main CGO algorithm to attain the optimum solution.
- Twenty-three bench functions were applied to prove the effectiveness of the improved QCGO algorithm compared to other different techniques (i.e., SDO, WOA, BOA, and the conventional CGO).
- The robustness of the QCGO-TD-TI controller has been validated by a fair comparison between its performance and other performances of TD-TI controllers based on the algorithms from the literature (i.e., SSA, TLBO, and AOA).
- The CGO-TD-TI controller performance was compared with the QCGO-TD-TI controller to ensure that the improved QCGO algorithm attains more optimal results than the main CGO algorithm.
- The efficacy of the suggested combining TD-TI controller has been ensured through a fair-maiden comparison between its performance and the performances of other mentioned controllers (i.e., TID and PID).
- Several scenarios have been presented in this work to study the effectiveness of the suggested controller in tackling the problem of LFC, such as applying different load variation types, the high penetration of RESs in both areas, and applying the communication time delay.
- EV integration was proposed in both areas to test its performance in enhancing the studied power grid frequency.
- All previous simulation results have confirmed the ability of the proposed combining TD-TI controller to effectively handle the LFC problem. Moreover, the improved QCGO algorithm proved its robustness in selecting the optimal controller parameters, which led to achieving more system stability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbols | Parameters |
| SLP | Step load perturbation |
| RLV | Random load variation |
| TID | Tilt-Integral-Derivative |
| TI-TD | Combining Tilt-Integral Tilt-Derivative |
| PID | Proportional-Integral-Derivative |
| FOCs | Fractional-Order Controllers |
| FOPID | Fractional-Order PID |
| CCs | Cascaded Controllers |
| MPC | Model predictive control |
| I-PD | Integral-Proportional Derivative |
| I-TD | Integral-Tilt Derivative |
| PSO | Particle swarm optimization |
| SDO | Supply-demand-based optimization |
| WOA | Whale optimization algorithm |
| AOA | Arithmetic optimization algorithm |
| TLBO | Teaching learning-based optimization |
| SSA | Salp swarm algorithm |
| BOA | Butterfly optimization algorithm |
| CGO | Chaos game optimization |
| QCGO | Improved chaos game optimization |
| LFC | Load frequency control |
| ACE | Area control error |
| p.u | Per unit |
| Subscript refers to the specified area | |
| EVs | Electrical vehicles |
| RESs | Renewable energy sources |
| overshoot | |
| undershoot | |
| Wind turbine output power | |
| ρ | The air density |
| The area swept by the blades of a turbine | |
| The wind speed | |
| The coefficient of the rotor blades | |
| - | The turbine coefficients |
| β | The pitch angle |
| The radius of the rotor | |
| The rotor speed | |
| The optimum tip-speed ratio | |
| The intermittent tip-speed ratio | |
| Frequency bias factor of Area 1 | |
| Frequency bias factor of Area 2 | |
| Frequency deviation in area 1 | |
| Frequency deviation in area 2 | |
| Tie-line power flow from area 1 to area 2 | |
| Tie-line power flow from area 2 to area 1 | |
| Coefficient of synchronizing | |
| Regulation constant of thermal turbine | |
| Regulation constant of hydropower plant | |
| Regulation constant of gas turbine | |
| Control area capacity ratio | |
| Participation factor for thermal unit | |
| Participation factor for hydro unit | |
| Participation factor for a gas unit | |
| Gain constant of power system | |
| The time constant of the power system | |
| Governor time constant | |
| Turbine time constant | |
| Gain of reheater steam turbine | |
| Time constant of reheater steam turbine | |
| Speed governor time constant of hydro turbine | |
| Speed governor reset time of the hydro turbine | |
| The transient droop time constant of hydro turbine speed governor | |
| Nominal string time of water in penstock | |
| Gas turbine constant of valve positioner | |
| Valve positioner of gas turbine | |
| The lag time constant of the gas turbine speed governor | |
| The lead time constant of the gas turbine speed governor | |
| Gas turbine combustion reaction time delay | |
| Gas turbine fuel time constant | |
| Gas turbine compressor discharge volume–time constant | |
| Gain of electrical vehicle | |
| The time constant of electrical vehicle | |
| ITAE | Integral time absolute error |
| ISE | Integral square error |
| IAE | Integral absolute error |
| ITSE | Integral time squared error |
| The tilted gain | |
| The integral gain | |
| The derivative gain | |
| The tilt fractional component 0 | |
| The proportional gain | |
| The time interval for taking error signals’ samples | |
| Total time of simulation process | |
| The objective function |
References
- Ellabban, O.; Abu-Rub, H.; Blaabjerg, F. Renewable energy resources: Current status, future prospects and their enabling technology. Renew. Sustain. Energy Rev. 2014, 39, 748–764. [Google Scholar] [CrossRef]
- Abazari, A.; Soleymani, M.M.; Babaei, M.; Ghafouri, M.; Monsef, H.; Beheshti, M.T.H. High penetrated renewable energy sources-based AOMPC for microgrid’s frequency regulation during weather changes, time-varying parameters and generation unit collapse. IET Gener. Transm. Distrib. 2020, 14, 5164–5182. [Google Scholar] [CrossRef]
- Hamouda, N.; Babes, B.; Kahla, S.; Soufi, Y.; Petzoldt, J.; Ellinger, T. Predictive Control of a Grid Connected PV System Incorporating Active Power Filter functionalities. In Proceedings of the 2019 1st International Conference on Sustainable Renewable Energy Systems and Applications (ICSRESA), Tebessa, Algeria, 4–5 December 2019; pp. 1–6. [Google Scholar]
- Balu, N.J.; Lauby, M.G.; Kundur, P. Power System Stability and Control; Electrical Power Research Institute, McGraw-Hill Professional: Washington, DC, USA, 1994. [Google Scholar]
- Khamies, M.; Magdy, G.; Ebeed, M.; Kamel, S. A robust PID controller based on linear quadratic gaussian approach for improving frequency stability of power systems considering renewables. ISA Trans. 2021, 117, 118–138. [Google Scholar] [CrossRef] [PubMed]
- Khamari, D.; Kumbhakar, B.; Patra, S.; Laxmi, D.A.; Panigrahi, S. Load Frequency Control of a Single Area Power System using Firefly Algorithm. Int. J. Eng. Res. 2020, 9. [Google Scholar] [CrossRef]
- Chen, M.-R.; Zeng, G.-Q.; Xie, X.-Q. Population extremal optimization-based extended distributed model predictive load frequency control of multi-area interconnected power systems. J. Frankl. Inst. 2018, 355, 8266–8295. [Google Scholar] [CrossRef]
- Jagatheesan, K.; Anand, B.; Samanta, S.; Dey, N.; Santhi, V.; Ashour, A.S.; Balas, V.E. Application of flower pollination algorithm in load frequency control of multi-area interconnected power system with nonlinearity. Neural Comput. Appl. 2016, 28, 475–488. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Application of backtracking search algorithm in load frequency control of multi-area interconnected power system. Ain Shams Eng. J. 2018, 9, 257–276. [Google Scholar] [CrossRef] [Green Version]
- Guha, D.; Roy, P.K.; Banerjee, S. Load frequency control of interconnected power system using grey wolf optimization. Swarm Evol. Comput. 2016, 27, 97–115. [Google Scholar] [CrossRef]
- Tasnin, W.; Saikia, L.C.; Raju, M. Deregulated AGC of multi-area system incorporating dish-Stirling solar thermal and geothermal power plants using fractional order cascade controller. Int. J. Electr. Power Energy Syst. 2018, 101, 60–74. [Google Scholar] [CrossRef]
- Sharma, M.; Dhundhara, S.; Arya, Y.; Prakash, S. Frequency excursion mitigation strategy using a novel COA optimised fuzzy controller in wind integrated power systems. IET Renew. Power Gener. 2020, 14, 4071–4085. [Google Scholar] [CrossRef]
- Chen, G.; Li, Z.; Zhang, Z.; Li, S. An Improved ACO Algorithm Optimized Fuzzy PID Controller for Load Frequency Control in Multi Area Interconnected Power Systems. IEEE Access 2020, 8, 6429–6447. [Google Scholar] [CrossRef]
- Akula, S.K.; Salehfar, H. Frequency Control in Microgrid Communities Using Neural Networks. In Proceedings of the 2019 North American Power Symposium (NAPS), Wichita, KS, USA, 13–15 October 2019; pp. 1–6. [Google Scholar]
- Yousef, H. Adaptive fuzzy logic load frequency control of multi-area power system. Int. J. Electr. Power Energy Syst. 2015, 68, 384–395. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, J.; Xu, S. H-Infinity Load Frequency Control of Networked Power Systems via an Event-Triggered Scheme. IEEE Trans. Ind. Electron. 2020, 67, 7104–7113. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust Frequency Control in an Islanded Microgrid: H∞ and μ-Synthesis Approaches. IEEE Trans. Smart Grid 2015, 7, 706–717. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.; Sarkar, S.K.; Das, S.K.; Miao, Y. A comparative study of LQR, LQG, and integral LQG controller for frequency control of interconnected smart grid. In Proceedings of the 2017 3rd International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 7–9 December 2017. [Google Scholar]
- Das, S.K.; Rahman, M.; Paul, S.K.; Armin, M.; Roy, P.N.; Paul, N. High-Performance Robust Controller Design of Plug-In Hybrid Electric Vehicle for Frequency Regulation of Smart Grid Using Linear Matrix Inequality Approach. IEEE Access 2019, 7, 116911–116924. [Google Scholar] [CrossRef]
- Singh, V.P.; Kishor, N.; Samuel, P. Improved load frequency control of power system using LMI based PID approach. J. Frankl. Inst. 2017, 354, 6805–6830. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K.; Tripathy, M. Load Frequency Control of Multi Area Interconnected Microgrid Power System using Grasshopper Optimization Algorithm Optimized Fuzzy PID Controller. In Proceedings of the 2018 Recent Advances on Engineering, Technology and Computational Sciences (RAETCS), Allahabad, India, 6–8 February 2018. [Google Scholar]
- Dhanasekaran, B.; Siddhan, S.; Kaliannan, J. Ant colony optimization technique tuned controller for frequency regulation of single area nuclear power generating system. Microprocess. Microsyst. 2020, 73, 102953. [Google Scholar] [CrossRef]
- Annamraju, A.; Nandiraju, S. Coordinated control of conventional power sources and PHEVs using jaya algorithm optimized PID controller for frequency control of a renewable penetrated power system. Prot. Control. Mod. Power Syst. 2019, 4, 28. [Google Scholar] [CrossRef] [Green Version]
- Rai, A.; Das, D.K. Optimal PID Controller Design by Enhanced Class Topper Optimization Algorithm for Load Frequency Control of Interconnected Power Systems. Smart Sci. 2020, 8, 125–151. [Google Scholar] [CrossRef]
- Tepljakov, A.; Gonzalez, E.A.; Petlenkov, E.; Belikov, J.; Monje, C.A.; Petráš, I. Incorporation of fractional-order dynamics into an existing PI/PID DC motor control loop. ISA Trans. 2016, 60, 262–273. [Google Scholar] [CrossRef]
- Podlubny, I.; Dorcak, L.; Kostial, I. On fractional derivatives, fractional-order dynamic systems and PI/sup λ/D/sup μ/-controllers. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 12 December 1997; Volume 5, pp. 4985–4990. [Google Scholar]
- Podlubny, I. Fractional-order systems and PI/sup/spl lambda//D/sup/spl mu//-controllers. IEEE Trans. Autom. Control. 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Morsali, J.; Zare, K.; Hagh, M.T. Comparative performance evaluation of fractional order controllers in LFC of two-area diverse-unit power system with considering GDB and GRC effects. J. Electr. Syst. Inf. Technol. 2018, 5, 708–722. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H. Design an optimal fuzzy fractional proportional integral derivative controller with derivative filter for load frequency control in power systems. Trans. Inst. Meas. Control. 2019, 41, 2563–2581. [Google Scholar] [CrossRef]
- Topno, P.N.; Chanana, S. Differential evolution algorithm based tilt integral derivative control for LFC problem of an interconnected hydro-thermal power system. J. Vib. Control. 2017, 24, 3952–3973. [Google Scholar] [CrossRef]
- Elmelegi, A.; Mohamed, E.A.; Aly, M.; Ahmed, E.M.; Mohamed, A.-A.A.; Elbaksawi, O. Optimized Tilt Fractional Order Cooperative Controllers for Preserving Frequency Stability in Renewable Energy-Based Power Systems. IEEE Access 2021, 9, 8261–8277. [Google Scholar] [CrossRef]
- Mohamed, E.A.; Ahmed, E.M.; Elmelegi, A.; Aly, M.; Elbaksawi, O.; Mohamed, A.-A.A. An Optimized Hybrid Fractional Order Controller for Frequency Regulation in Multi-Area Power Systems. IEEE Access 2020, 8, 213899–213915. [Google Scholar] [CrossRef]
- Saha, A.; Saikia, L.C. Load frequency control of a wind-thermal-split shaft gas turbine-based restructured power system integrating FACTS and energy storage devices. Int. Trans. Electr. Energy Syst. 2018, 29, e2756. [Google Scholar] [CrossRef]
- Prakash, A.; Murali, S.; Shankar, R.; Bhushan, R. HVDC tie-link modeling for restructured AGC using a novel fractional order cascade controller. Electr. Power Syst. Res. 2019, 170, 244–258. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Shabib, G.; Abdelhameed, E.H.; Khamies, M.; Qudaih, Y. Load Frequency Control in Single Area System Using Model Predictive Control and Linear Quadratic Gaussian Techniques. Int. J. Electr. Energy 2015, 3, 141–143. [Google Scholar] [CrossRef]
- Mohamed, M.A.; Diab, A.A.Z.; Rezk, H.; Jin, T. A novel adaptive model predictive controller for load frequency control of power systems integrated with DFIG wind turbines. Neural Comput. Appl. 2019, 32, 7171–7181. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Mokhlis, H.; Haq, I.U.; Laghari, G.F.; Mansor, N.N. Fitness Dependent Optimizer-Based Automatic Generation Control of Multi-Source Interconnected Power System with Non-Linearities. IEEE Access 2020, 8, 100989–101003. [Google Scholar] [CrossRef]
- Kumari, S.; Shankar, G. Novel application of integral-tilt-derivative controller for performance evaluation of load frequency control of interconnected power system. IET Gener. Transm. Distrib. 2018, 12, 3550–3560. [Google Scholar] [CrossRef]
- Moon, Y.H.; Ryu, H.S.; Kim, B.; Song, K.B. Optimal tracking approach to load frequency control in power systems. In Proceedings of the 2000 IEEE Power Engineering Society Winter Meeting, Conference Proceedings (Cat. No. 00CH37077). Singapore, 23–27 January 2000. [Google Scholar]
- Aoki, M. Control of large-scale dynamic systems by aggregation. IEEE Trans. Autom. Control. 1968, 13, 246–253. [Google Scholar] [CrossRef]
- Gozde, H.; Taplamacioglu, M.C.; Kocaarslan, İ. Comparative performance analysis of Artificial Bee Colony algorithm in automatic generation control for interconnected reheat thermal power system. Int. J. Electr. Power Energy Syst. 2012, 42, 167–178. [Google Scholar] [CrossRef]
- Hasanien, H.M.; El-Fergany, A.A. Salp swarm algorithm-based optimal load frequency control of hybrid renewable power systems with communication delay and excitation cross-coupling effect. Electr. Power Syst. Res. 2019, 176, 105938. [Google Scholar] [CrossRef]
- Hasanien, H.M. Whale optimisation algorithm for automatic generation control of interconnected modern power systems including renewable energy sources. IET Gener. Transm. Distrib. 2017, 12, 607–614. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, T.T.; Duong, M.Q.; Doan, A.T. Optimal operation of transmission power networks by using improved stochastic fractal search algorithm. Neural Comput. Appl. 2019, 32, 9129–9164. [Google Scholar] [CrossRef]
- Khadanga, R.K.; Kumar, A.; Panda, S. A novel sine augmented scaled sine cosine algorithm for frequency control issues of a hybrid distributed two-area power system. Neural Comput. Appl. 2021, 33, 12791–12804. [Google Scholar] [CrossRef]
- Sahu, B.K.; Pati, T.K.; Nayak, J.R.; Panda, S.; Kar, S.K. A novel hybrid LUS–TLBO optimized fuzzy-PID controller for load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2016, 74, 58–69. [Google Scholar] [CrossRef]
- Elkasem, A.H.A.; Khamies, M.; Magdy, G.; Taha, I.B.M.; Kamel, S. Frequency Stability of AC/DC Interconnected Power Systems with Wind Energy Using Arithmetic Optimization Algorithm-Based Fuzzy-PID Controller. Sustainability 2021, 13, 12095. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Hussein, M.E.; Banakhr, F.A.; Kamel, S. An Efficient Control Strategy for Enhancing Frequency Stability of Multi-Area Power System Considering High Wind Energy Penetration. IEEE Access 2020, 8, 140062–140078. [Google Scholar] [CrossRef]
- Khan, M.; Sun, H.; Xiang, Y.; Shi, D. Electric vehicles participation in load frequency control based on mixed H2/H∞. Int. J. Electr. Power Energy Syst. 2021, 125, 106420. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Biswal, A.; Sekhar, G.T.C. Design and analysis of tilt integral derivative controller with filter for load frequency control of multi-area interconnected power systems. ISA Trans. 2016, 61, 251–264. [Google Scholar] [CrossRef]
- Mohanty, B.; Panda, S.; Hota, P.K. Controller parameters tuning of differential evolution algorithm and its application to load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2014, 54, 77–85. [Google Scholar] [CrossRef]
- Talatahari, S.; Azizi, M. Chaos Game Optimization: A novel metaheuristic algorithm. Artif. Intell. Rev. 2021, 54, 917–1004. [Google Scholar] [CrossRef]
- Azizi, M.; Aickelin, U.; Khorshidi, H.A.; Shishehgarkhaneh, M. Shape and Size Optimization of Truss Structures by Chaos Game Optimization Considering Frequency Constraints. J. Adv. Res. 2022, in press. [Google Scholar] [CrossRef]
- Coelho, L.d.S. A quantum particle swarm optimizer with chaotic mutation operator. Chaos Solitons Fractals 2008, 37, 1409–1418. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Zhang, Z. Supply-demand-based optimization: A novel economics-inspired algorithm for global optimization. IEEE Access 2019, 7, 73182–73206. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A.J. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | [6] | [9] | [28] | [32] | [37] | [38] | This Study |
|---|---|---|---|---|---|---|---|
| Controller structure | PI/PID controller | PI/PD controller | FOPID/TID controller | Combining of FOPID-TID controller | I-PD controller | I-TD controller | Combining TD-TI controller |
| Controller design adoption | Firefly algorithm | Backtracking search algorithm | Improved PSO | Manta ray foraging optimization algorithm | Fitness dependent optimizer | Water cycle algorithm | QCGO |
| Load perturbation challenge | SLP | SLP/RLV | SLP/RLV | SLP/series SLP | SLP | SLP/RLV | SLP/series SLP/RLV |
| Sort of studied system | Single-area power system | Multi-area power system | Multi-area power system | Multi-area power system | Multi-area power system | Multi-area power system | Multi-area power system |
| RESs Penetration | Not considered | Not considered | Not considered | considered | Not considered | Not considered | Considered with high penetration |
| Effect of communication time delay | Not considered | Not considered | Not considered | Not considered | Considered before the action of one control unit only | Not considered | Considered before and after the control action |
| Effect of EVs | Not considered | Not considered | Not considered | Not considered | Not considered | Not considered | Considered |
| Control Block | Transfer Functions |
|---|---|
| Thermal Governor | |
| Reheater of Thermal Turbine | |
| Thermal Turbine | |
| Hydro Governor | |
| Transient Droop Compensation | |
| Hydro Turbine | |
| Valve Positioner of Gas Turbine | |
| Speed Governor of Gas Turbine | |
| Fuel System and Combustor | |
| Gas Turbine Dynamics | |
| Power System 1 | |
| Power System 2 | |
| Electrical Vehicle 1 | |
| Electrical Vehicle 2 |
| Parameter Descriptions | Symbol | Standard Values |
|---|---|---|
| Frequency bias factor | 0.4312 MW/Hz | |
| Coefficient of synchronizing | 0.0433 MW | |
| The regulation constant of thermal turbine The regulation constant of hydropower plant The regulation constant of gas turbine | 2.4 HZ/MW 2.4 HZ/MW 2.4 HZ/MW | |
| Control area capacity ratio | −1 | |
| Participation factor for a thermal unit | 0.543478 | |
| Participation factor for a hydro unit | 0.326084 | |
| Participation factor for a gas unit | 0.130438 | |
| Gain constant of power system | 68.9566 | |
| The time constant of the power system | 11.49 s | |
| Governor time constant | 0.08 s | |
| Turbine time constant | 0.3 s | |
| Gain of reheater steam turbine | 0.3 | |
| The time constant of reheater steam turbine | 10 s | |
| Speed governor time constant of hydro turbine | 0.2 s | |
| Speed governor reset time of the hydro turbine | 5 s | |
| The transient droop time constant of hydro turbine speed governor | 28.75 s | |
| Nominal string time of water in penstock | 1 s | |
| Gas turbine constant of valve positioner | 0.05 | |
| Valve positioner of gas turbine | 1 | |
| The lag time constant of the gas turbine speed governor | 1 s | |
| The lead time constant of the gas turbine speed governor | 0.6 s | |
| Gas turbine combustion reaction time delay | 0.01 s | |
| Gas turbine fuel time constant | 0.23 s | |
| Gas turbine compressor discharge volume–time constant | 0.2 s | |
| Gain of electrical vehicle | 1 | |
| The time constant of electrical vehicle | 0.28 s |
| Function | QCGO | CGO | SDO | WOA | BOA | |
|---|---|---|---|---|---|---|
| F1 | Best | 2.4 | 1.52 | 1.39 | 1.92 | 3.87 |
| Mean | 1.4 | 4.97 | 1.37 | 7.2 | 4.96 | |
| Median | 4.8 | 3.86 | 3.74 | 2.28 | 4.95 | |
| Worst | 1.2 | 3.9 | 8.43 | 4.34 | 6 | |
| Std | 3.7 | 9.85 | 2.74 | 1.34 | 4.94 | |
| F2 | Best | 4.2 | 3.64 | 1.83 | 4.41 | 4.26 |
| Mean | 1.85 | 9.17 | 3.76 | 5.82 | 5.71 | |
| Median | 6.63 | 1.96 | 1.13 | 1.34 | 5.77 | |
| Worst | 7.99 | 9.73 | 3.98 | 5.99 | 7.58 | |
| Std | 2.41 | 2.23 | 9.1 | 1.34 | 9.92 | |
| F3 | Best | 2.68 | 2.41 | 6.27 | 0.027608 | 3.85 |
| Mean | 1.66 | 6.69 | 6.91 | 1.518335 | 4.67 | |
| Median | 4.45 | 1.39 | 1.4 | 1.011391 | 4.61 | |
| Worst | 1.82 | 7.13 | 1.38 | 3.914695 | 5.57 | |
| Std | 4.41 | 1.68 | 3.09 | 1.18435 | 5.02 | |
| F4 | Best | 5.12 | 3.76 | 1.11 | 0.99528 | 8.45 |
| Mean | 6.71 | 3.7 | 4.52 | 53.18395 | 1.02 | |
| Median | 2.13 | 1.4 | 1.14 | 60.93168 | 1.02 | |
| Worst | 3.32 | 1.81 | 1.94 | 89.09969 | 1.15 | |
| Std | 9.43 | 5.38 | 6.34 | 29.69543 | 8.51 | |
| F5 | Best | 18.11582 | 17.11845 | 27.90967 | 27.88483 | 28.89058 |
| Mean | 19.57861 | 19.61026 | 28.65096 | 28.27419 | 28.92369 | |
| Median | 19.35622 | 19.29265 | 28.74726 | 28.43647 | 28.91978 | |
| Worst | 22.2175 | 21.59463 | 28.98699 | 28.7227 | 28.96927 | |
| Std | 1.149609 | 1.224882 | 0.295026 | 0.28925 | 0.021273 | |
| F6 | Best | 1.75 | 6.75 | 0.039957 | 0.303542 | 4.311051 |
| Mean | 2.86 | 2.63 | 2.568541 | 0.655907 | 5.211726 | |
| Median | 7.7 | 6.23 | 2.038779 | 0.62203 | 5.06303 | |
| Worst | 4.89 | 2.57 | 7.250251 | 1.16408 | 6.168001 | |
| Std | 1.09 | 6.11 | 1.852701 | 0.210811 | 0.509499 | |
| F7 | Best | 1.02 | 0.000197 | 8.66 | 0.0004 | 0.000983 |
| Mean | 0.000263 | 0.00092 | 0.002356 | 0.00542 | 0.002696 | |
| Median | 0.000231 | 0.00085 | 0.001136 | 0.003763 | 0.002776 | |
| Worst | 0.000768 | 0.001975 | 0.013813 | 0.019069 | 0.005116 | |
| Std | 0.000177 | 0.000583 | 0.003331 | 0.005011 | 0.001104 | |
| Function | QCGO | CGO | SDO | WOA | BOA | |
|---|---|---|---|---|---|---|
| F8 | Best | −1671.01 | −1770.26 | −1655 | −1909.05 | −921.028 |
| Mean | −1465.24 | −1490.19 | −1312.83 | −1786.9 | −766.513 | |
| Median | −1453.48 | −1483.32 | −1385.86 | −1907.06 | −778.594 | |
| Worst | −1313.6 | −1235.22 | −598.802 | −1632.06 | −647.792 | |
| Std | 108.2831 | 123.7418 | 294.008 | 138.0759 | 61.76107 | |
| F9 | Best | 0.00 | 0.00 | 4.33 | 0.00 | 5.17 |
| Mean | 0.00 | 0.00 | 1.75 | 1.14 | 0.003376 | |
| Median | 0.00 | 0.00 | 4.17 | 0.00 | 3.86 | |
| Worst | 0.00 | 0.00 | 3.02 | 1.14 | 0.047754 | |
| Std | 0.00 | 0.00 | 6.75 | 2.97 | 0.010836 | |
| F10 | Best | 8.88 | 8.88 | 8.88 | 4.44 | 1.67 |
| Mean | 2.49 | 3.2 | 8.88 | 1.33 | 4.77 | |
| Median | 8.88 | 4.44 | 8.88 | 1.15 | 4.55 | |
| Worst | 4.44 | 4.44 | 8.88 | 3.29 | 7.94 | |
| Std | 1.81 | 1.74 | 0.00 | 8.11 | 1.69 | |
| F11 | Best | 0.00 | 0.00 | 0.00 | 0.00 | 3.23 |
| Mean | 0.00 | 0.00 | 0.00 | 0.021832 | 4.29 | |
| Median | 0.00 | 0.00 | 0.00 | 0.00 | 4.22 | |
| Worst | 0.00 | 0.00 | 0.00 | 0.26626 | 5.81 | |
| Std | 0.00 | 0.00 | 0.00 | 0.068973 | 6.29 | |
| F12 | Best | 3.66 | 1.34 | 0.001152 | 0.006052 | 0.33315 |
| Mean | 5.69 | 8.04 | 0.23467 | 0.022239 | 0.565424 | |
| Median | 2.26 | 1.93 | 0.067805 | 0.015529 | 0.562862 | |
| Worst | 3.32 | 5.01 | 1.492821 | 0.087947 | 0.754521 | |
| Std | 8.06 | 1.36 | 0.352063 | 0.018774 | 0.108748 | |
| F13 | Best | 6.36 | 7.4 | 0.046216 | 0.400281 | 2.497296 |
| Mean | 0.007142 | 0.036733 | 1.867552 | 0.687522 | 2.894224 | |
| Median | 0.005494 | 0.010987 | 1.934246 | 0.598054 | 2.982946 | |
| Worst | 0.043949 | 0.233414 | 2.999924 | 1.321352 | 3.109356 | |
| Std | 0.010254 | 0.065978 | 0.961284 | 0.248523 | 0.153028 | |
| Function | QCGO | CGO | SDO | WOA | BOA | |
|---|---|---|---|---|---|---|
| F14 | Best | 0.998004 | 0.998004 | 0.998004 | 0.998004 | 0.998004 |
| Mean | 0.998004 | 0.998004 | 3.494696 | 2.230204 | 1.301281 | |
| Median | 0.998004 | 0.998004 | 1.495017 | 1.495017 | 1.024436 | |
| Worst | 0.998004 | 0.998004 | 12.67051 | 10.76318 | 2.983027 | |
| Std | 0.00 | 5.09 | 3.953203 | 2.241367 | 0.534994 | |
| F15 | Best | 0.000307 | 0.000307 | 0.000307 | 0.000311 | 0.000315 |
| Mean | 0.000307 | 0.000353 | 0.00067 | 0.000626 | 0.000487 | |
| Median | 0.000307 | 0.000307 | 0.000527 | 0.000578 | 0.000405 | |
| Worst | 0.000307 | 0.001223 | 0.002121 | 0.001528 | 0.000917 | |
| Std | 1.68 | 0.000205 | 0.000473 | 0.000342 | 0.000173 | |
| F16 | Best | −1.03163 | −1.03163 | −1.03163 | −1.03163 | −1.40747 |
| Mean | −1.03163 | −1.03163 | −1.03005 | −1.03163 | −1.18199 | |
| Median | −1.03163 | −1.03163 | −1.03163 | −1.03163 | −1.18517 | |
| Worst | −1.03163 | −1.03163 | −1.00046 | −1.03163 | −1.07213 | |
| Std | 2.22 | 2.28 | 0.006966 | 1.94 | 0.088213 | |
| F17 | Best | 0.397887 | 0.397887 | 0.397887 | 0.397887 | 0.398293 |
| Mean | 0.397887 | 0.397887 | 0.397987 | 0.397896 | 0.409332 | |
| Median | 0.397887 | 0.397887 | 0.397887 | 0.39789 | 0.406611 | |
| Worst | 0.397887 | 0.397887 | 0.399795 | 0.397967 | 0.461881 | |
| Std | 0.00 | 0.00 | 0.000426 | 1.78 | 0.014049 | |
| F18 | Best | 3.00 | 3.00 | 3.00 | 3.000001 | 3.000586 |
| Mean | 3.00 | 3.00 | 3.001185 | 3.000069 | 3.092676 | |
| Median | 3.00 | 3.00 | 3.00 | 3.000026 | 3.054728 | |
| Worst | 3.00 | 3.00 | 3.023537 | 3.000668 | 3.425476 | |
| Std | 2.7 | 6.03 | 0.005261 | 0.000147 | 0.108993 | |
| F19 | Best | −0.30048 | −0.30048 | −0.30048 | −0.30048 | −0.30048 |
| Mean | −0.30048 | −0.30048 | −0.2893 | −0.30048 | −0.30048 | |
| Median | −0.30048 | −0.30048 | −0.30038 | −0.30048 | −0.30048 | |
| Worst | −0.30048 | −0.30048 | −0.19165 | −0.30048 | −0.30048 | |
| Std | 1.14 | 1.14 | 0.026531 | 1.14 | 3.74 | |
| F20 | Best | −3.322 | −3.322 | −3.322 | −3.31923 | |
| Mean | −3.26849 | −3.28038 | −3.09697 | −2.98949 | ||
| Median | −3.322 | −3.322 | −3.2031 | −3.15019 | ||
| Worst | −3.2031 | −3.2031 | −0.89904 | −1.57922 | ||
| Std | 0.060685 | 0.058182 | 0.550986 | 0.479795 | 7.35 | |
| F21 | Best | −10.1532 | −10.1532 | −10.1532 | −10.1528 | −4.61081 |
| Mean | −10.1532 | −9.90058 | −8.703 | −7.35262 | −4.0759 | |
| Median | −10.1532 | −10.1532 | −10.1532 | −10.0113 | −4.12522 | |
| Worst | −10.1532 | −5.10077 | −4.99677 | −2.59723 | −3.18003 | |
| Std | 3.21 | 1.129757 | 2.23952 | 3.245445 | 0.379957 | |
| F22 | Best | −10.4029 | −10.4029 | −10.4029 | −10.4008 | −4.76031 |
| Mean | −10.4029 | −10.4029 | −8.45822 | −7.90953 | −3.74931 | |
| Median | −10.4029 | −10.4029 | −10.4029 | −10.2376 | −3.64889 | |
| Worst | −10.4029 | −10.4029 | −1.0677 | −3.69711 | −2.93305 | |
| Std | 3.05 | 3.36 | 3.128689 | 2.779744 | 0.479377 | |
| F23 | Best | −10.5364 | −10.5364 | −10.5364 | −10.5297 | −4.51577 |
| Mean | −9.99562 | −9.93332 | −7.90449 | −7.3919 | −3.38426 | |
| Median | −10.5364 | −10.5364 | −10.5357 | −7.79854 | −3.60414 | |
| Worst | −5.12848 | −3.83543 | −3.79083 | −1.67334 | −1.95854 | |
| Std | 1.664525 | 1.868952 | 3.015319 | 3.33909 | 0.720921 | |
| Controller Properties | Thermal | Hydro | Gas |
|---|---|---|---|
| Combining TD-TI-based QCGO | = 3.5626 = 3.5311 | = 9.9468 = 9.9508 | = 3.7621 = 1.2938 |
| Combining TD-TI-based CGO | = 3.5715 = 3.4737 | = 9.9129 = 9.9827 | = 1.2782 = 6.9549 |
| Combining TD-TI-based SSA | = 2.9819 = 2.8288 | = 2.1217 = 5.1176 | = 9.6003 = 1.4599 |
| TID-based QCGO | = 7.9837, = 2.6219 | = 4.9139, = 8.0894 | = 1.6516, = 9.2214 |
| TID-based CGO | = 8.7199, = 3.5979 | = 5.1353, = 7.5851 | = 4.0435, = 3.3106 |
| PID-based TLBO [46] | = 2.0157 | = 2.2866 | = 4.9498 |
| PID-based AOA [47] | = 2.7449 | = 0.0875 | = 1.2779 |
| Controller Properties | Dynamic Response of | Dynamic Response of | Dynamic Response of | Objective Function Value (ITAE) |
|---|---|---|---|---|
| Combining TD-TI based on QCGO and ) | = 0.819 = −7.875 | = 0.0028 = −1.744 | = 0.0015 = −0.5361 | J = 0.075 |
| PID based on AOA and ) [47] | = 1.158 = −11.42 | = 0.02096 = −4.443 | = 0.01107 = −1.249 | J = 0.189 |
| PID based on TLBO and ) [46] | = 1.7217 = −19.7259 | = 0.4363 = −12.7986 | = 0.1712 = −3.0782 | J = 0.402 |
| Controller | |||
|---|---|---|---|
| Combining TD-TI based on QCGO | 60.01 52.43 | 86.4 99.36 | 82.6 99.12 |
| PID based on AOA | 42.11 32.70 | 65.29 95.2 | 59.42 93.53 |
| Controller Properties | Dynamic Response of | Dynamic Response of | Dynamic Response of | Objective Function Value (ITAE) |
|---|---|---|---|---|
| Combining TD-TI based on QCGO and ) | = 0.819 = −7.875 | = 0.0028 = −1.744 | = 0.0015 = −0.5361 | J = 0.075 |
| TID based on QCGO and ) | = 1.893 = −11.468 | = 0.3257 = −3.45 | = 0.0424 = −0.8862 | J = 0.1351 |
| TID based on CGO and ) | = 1.705 = −10.341 | = 0.3784 = −2.763 | = 0.0381 = −0.7397 | J = 0.1381 |
| Controller | |||
|---|---|---|---|
| Combining TD-TI based on QCGO | 60.01 52.43 | 86.4 99.36 | 82.6 99.12 |
| TID based on QCGO | 41.86 −9.95 | 73.04 25.35 | 71.21 75.23 |
| TID based on CGO | 47.6 0.97 | 78.4 13.27 | 75.97 77.75 |
| Controller Properties | Dynamic Response of | Dynamic Response of | Dynamic Response of | Objective Function Value (ITAE) |
|---|---|---|---|---|
| Combining TD-TI based on QCGO and ) | = 0.819 = −7.875 | = 0.0028 = −1.744 | = 0.0015 = −0.5361 | J = 0.075 |
| Combining TD-TI based on CGO and ) | = 1.097 = −8.95 | = 0.0025 = −2.383 | = 0.00136 = −0.665 | J = 0.078 |
| Combining TD-TI based on SSA and ) | = 1.763 = −9.978 | = 0.0896 = −2.713 | = 0.0124 = −0.7125 | J = 0.087 |
| Controller | |||
|---|---|---|---|
| Combining TD-TI based on QCGO | 60.01 52.43 | 86.4 99.36 | 82.6 99.12 |
| Combining TD-TI based on CGO | 54.63 36.28 | 81.38 99.43 | 78.4 99.21 |
| Combining TD-TI based on SSA | 49.42 −2.4 | 78.8 79.46 | 76.85 92.76 |
| Controller Properties | Dynamic Response of | Dynamic Response of | Dynamic Response of |
|---|---|---|---|
| Combining TD-TI based on QCGO and ) | = 15.6 = −22.9 | = 3.5 = −5.1 | = 1.000 = −1.67 |
| Combining TD-TI based on CGO and ) | = 18.00 = −26.1 | = 4.85 = −7.3 | = 1.3 = −1.9 |
| Combining TD-TI based on SSA and ) | = 21.000 = −31.000 | = 5.510 = −8.6 | = 1.40 = −2.15 |
| Controller | |||
|---|---|---|---|
| Combining TD-TI based on QCGO | 26.13 25.71 | 40.7 36.48 | 22.33 28.6 |
| Combining TD-TI based on CGO | 15.81 14.29 | 15.12 11.98 | 11.63 6.43 |
| Controller Properties | Dynamic Response of | Dynamic Response of | Dynamic Response of |
|---|---|---|---|
| Combining TD-TI based on QCGO and ) | = 7.4 = −11.9 | = 1.4 = −2.2 | = 0.51 = −0.76 |
| Combining TD-TI based on CGO and ) | = 8.40 = −13.5 | = 2.3 = −3.6 | = 0.65 = −1.000 |
| Combining TD-TI based on SSA and ) | = 10.000 = −15.000 | = 2.60 = −4.08 | = 0.72 = −1.14 |
| Controller | |||
|---|---|---|---|
| Combining TD-TI based on QCGO | 20.67 26.00 | 46.08 46.15 | 33.33 29.17 |
| Combining TD-TI based on CGO | 10.00 16.00 | 11.76 11.54 | 12.28 9.72 |
| Controller Properties | Dynamic Response of | Dynamic Response of | Dynamic Response of |
|---|---|---|---|
| Combining TD-TI based on QCGO and ) | = 71.0 = −22.0 | = 40.3 = −7.4 | = 4.8 = −2.7 |
| Combining TD-TI based on CGO and ) | = 81.0 = −27.0 | = 46.0 = −8.1 | = 6.1 = −3.6 |
| Combining TD-TI based on SSA and ) | = 96.000 = −30.000 | = 51.1 = −9.5 | = 6.5 = −3.88 |
| Controller | |||
|---|---|---|---|
| Combining TD-TI based on QCGO | 26.67 26.04 | 22.11 21.14 | 30.41 26.15 |
| Combining TD-TI based on CGO | 10.00 15.63 | 14.74 9.98 | 7.22 6.15 |
| Controller Properties | Dynamic Response of | Dynamic Response of | Dynamic Response of |
|---|---|---|---|
| Combining TD-TI based on QCGO and ) | = 72.0 = −10.0 | = 40.0 = −4.0 | = 4.7 = −2.5 |
| Combining TD-TI based on CGO and ) | = 81.0 = −12.0 | = 46.0 = −5.1 | = 6.0 = −3.69 |
| Combining TD-TI based on SSA and ) | = 93.000 = −16.000 | = 51.4 = −9.4 | = 6.4 = −3.83 |
| Controller | |||
|---|---|---|---|
| Combining TD-TI based on QCGO | 37.50 22.58 | 57.45 22.18 | 34.73 26.56 |
| Combining TD-TI based on CGO | 25.00 12.9 | 45.74 10.51 | 3.66 6.25 |
| Controller Properties | Dynamic Response of | Dynamic Response of | Dynamic Response of |
|---|---|---|---|
| Combining TD-TI based on QCGO with EVs and ) | = 62.1 = −8.4 | = 36.0 = −1.9 | = 4.16 = −2.2 |
| Combining TD-TI based on QCGO without EVs and ) | = 72.0 = −10.0 | = 40.0 = −4.0 | = 4.7 = −2.5 |
| Controller | |||
|---|---|---|---|
| Combining TD-TI based on QCGO with EVs | 47.5 33.23 | 79.79 29.96 | 42.56 35 |
| Combining TD-TI based on QCGO without EVs | 37.5 22.58 | 57.45 22.18 | 34.73 26.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elkasem, A.H.A.; Khamies, M.; Hassan, M.H.; Agwa, A.M.; Kamel, S. Optimal Design of TD-TI Controller for LFC Considering Renewables Penetration by an Improved Chaos Game Optimizer. Fractal Fract. 2022, 6, 220. https://doi.org/10.3390/fractalfract6040220
Elkasem AHA, Khamies M, Hassan MH, Agwa AM, Kamel S. Optimal Design of TD-TI Controller for LFC Considering Renewables Penetration by an Improved Chaos Game Optimizer. Fractal and Fractional. 2022; 6(4):220. https://doi.org/10.3390/fractalfract6040220
Chicago/Turabian StyleElkasem, Ahmed H. A., Mohamed Khamies, Mohamed H. Hassan, Ahmed M. Agwa, and Salah Kamel. 2022. "Optimal Design of TD-TI Controller for LFC Considering Renewables Penetration by an Improved Chaos Game Optimizer" Fractal and Fractional 6, no. 4: 220. https://doi.org/10.3390/fractalfract6040220
APA StyleElkasem, A. H. A., Khamies, M., Hassan, M. H., Agwa, A. M., & Kamel, S. (2022). Optimal Design of TD-TI Controller for LFC Considering Renewables Penetration by an Improved Chaos Game Optimizer. Fractal and Fractional, 6(4), 220. https://doi.org/10.3390/fractalfract6040220