
Second Derivative Block Hybrid Methods for the Numerical Integration of Differential Systems



Abstract
:1. Introduction
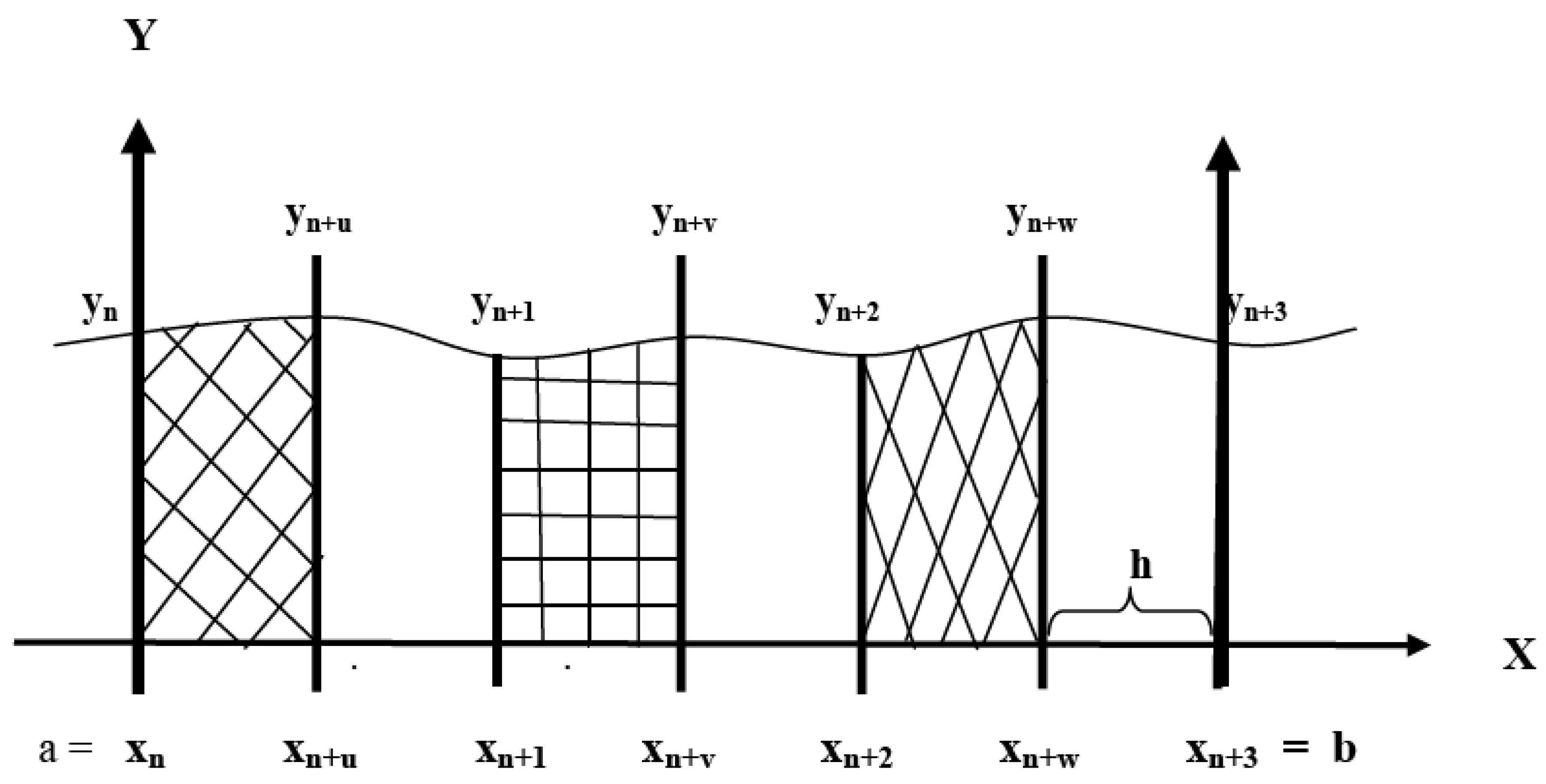
2. The Block Hybrid Methods
3. Specification of the Multistep Block Hybrid Methods
3.1. Block Hybrid Method of Seventh Order
3.2. Second-Derivative Block Hybrid Method of Order 14
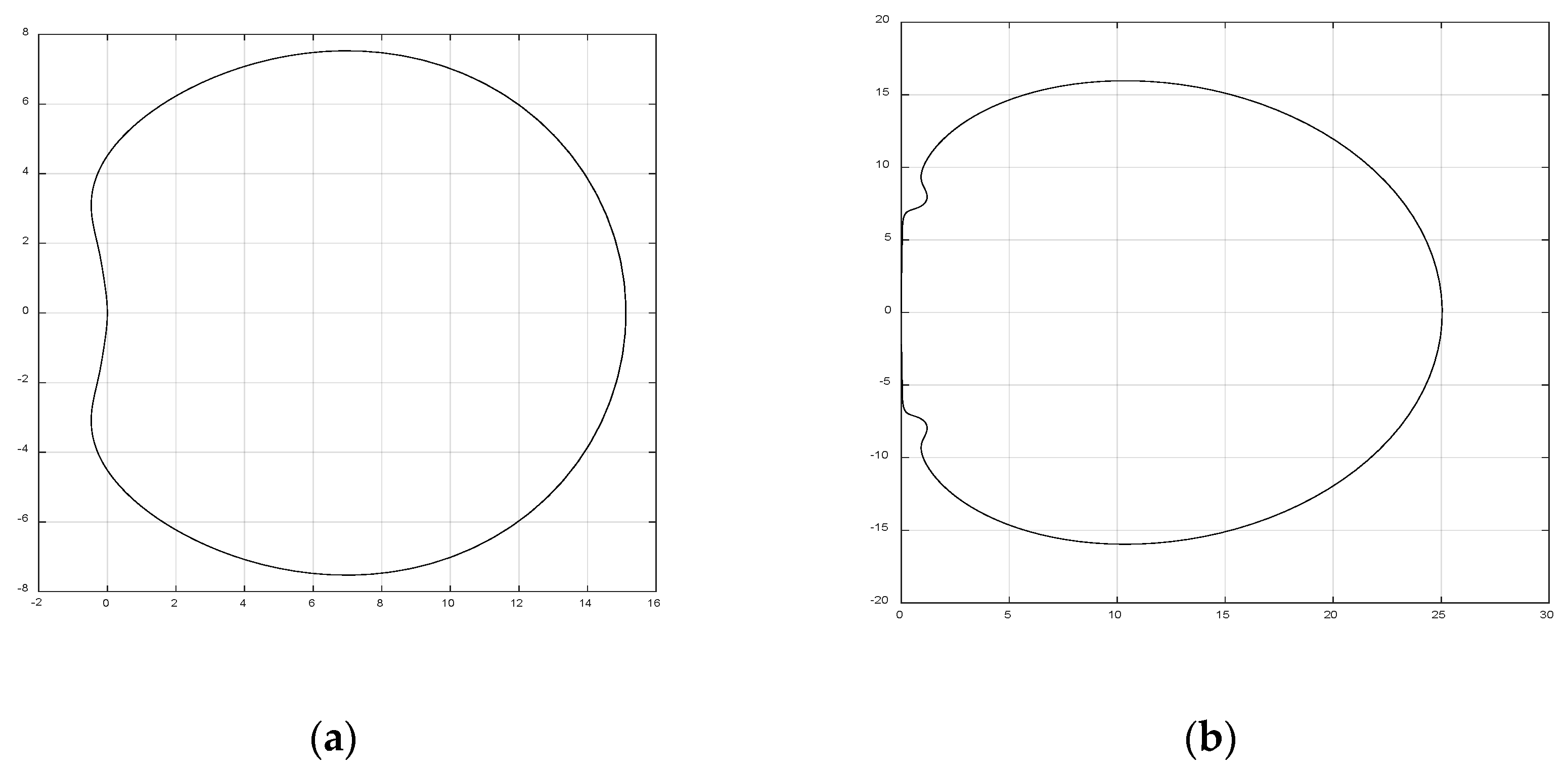
4. Regions of Absolute Stability (RAS) of the Block Hybrid Methods
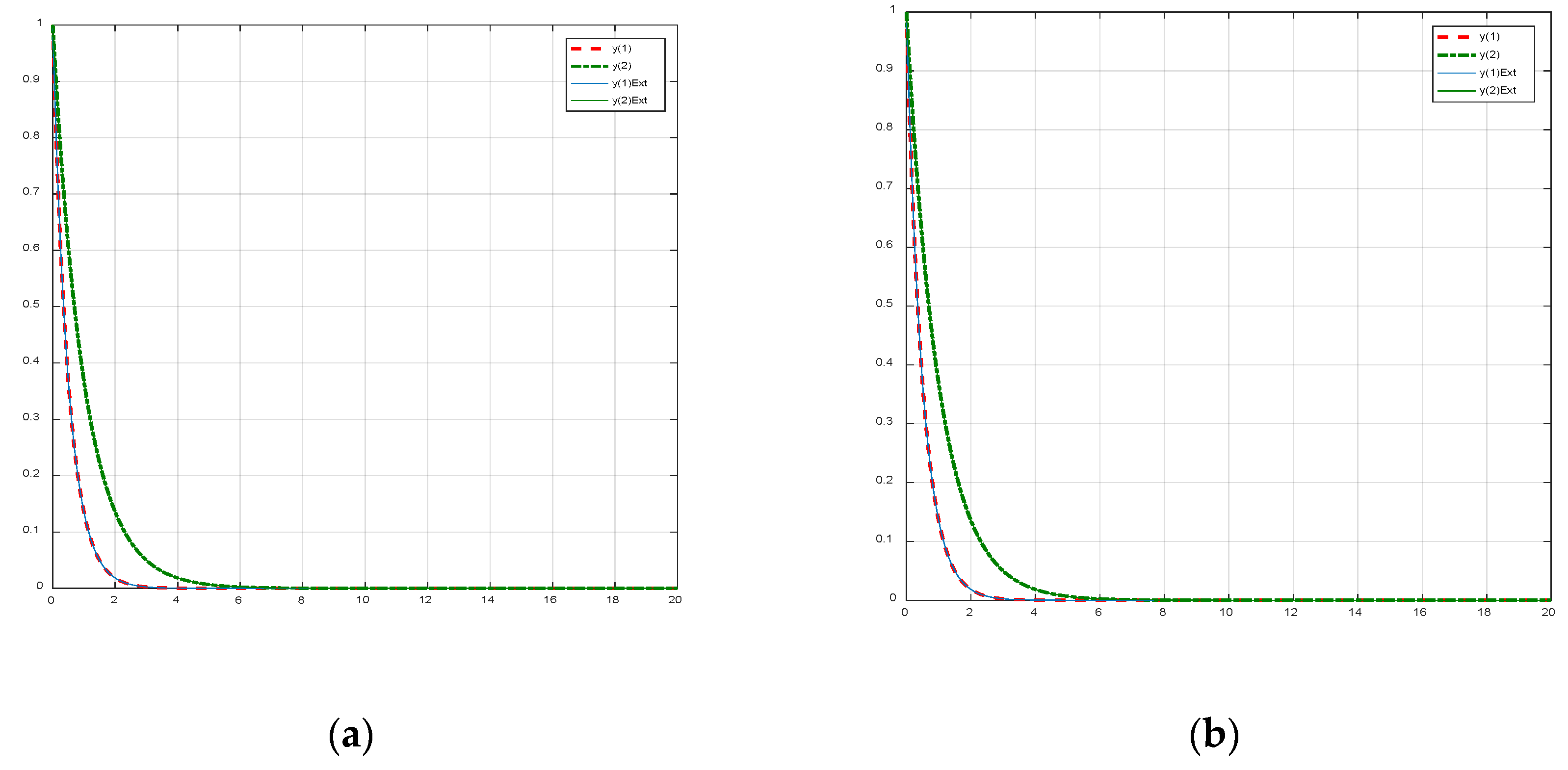
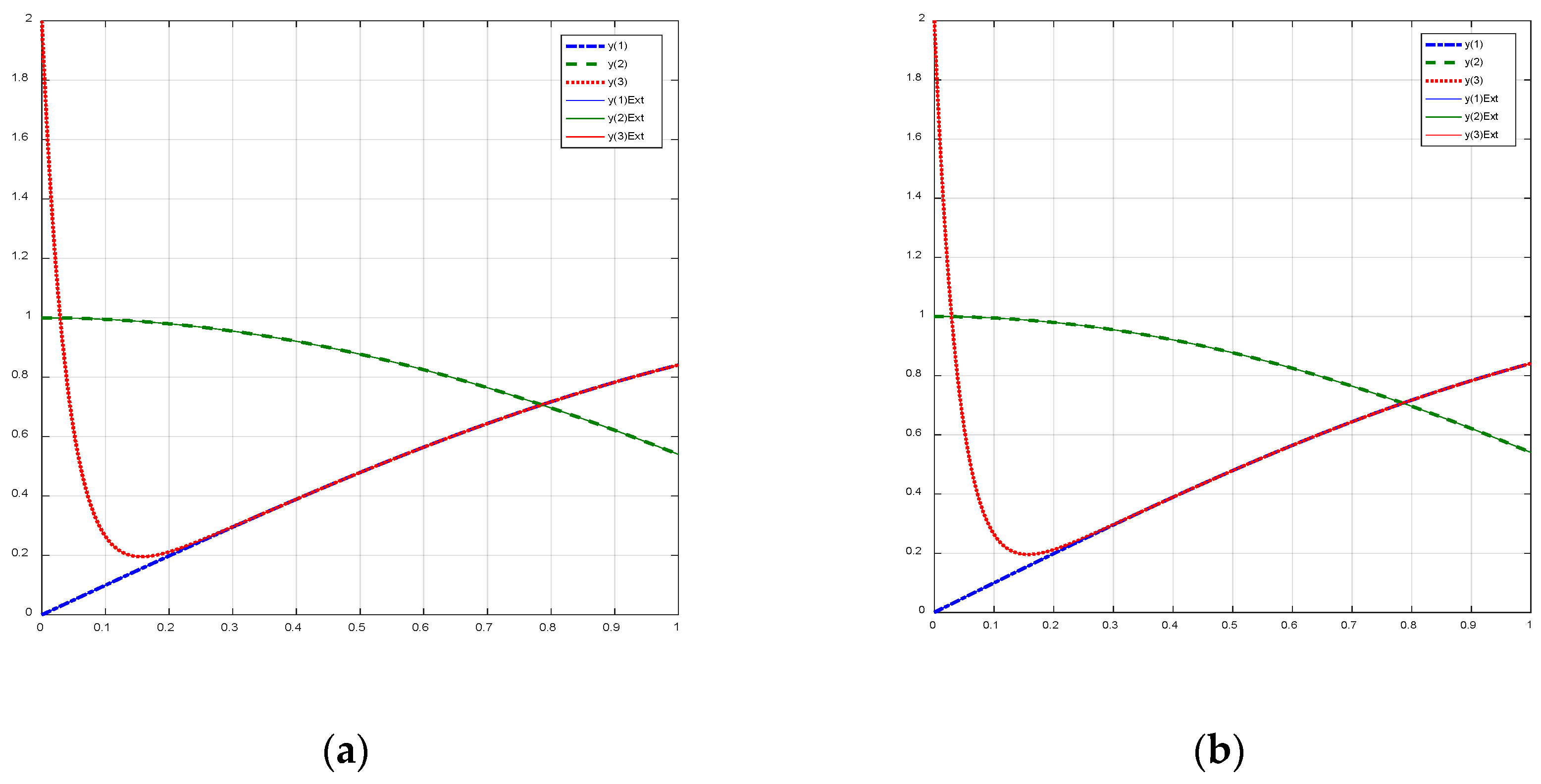
5. Numerical Illustrations
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Onumanyi, P.; Awoyemi, D.O.; Jator, S.N.; Sirisena, U.W. New linear multi-step methods with continuous coefficients for first order initial value problems. J. Nig. Math. Soc. 1994, 13, 37–51. [Google Scholar]
- Chollom, J.P.; Jackiewicz, Z. Construction of two step Runge-Kutta (TSRK) methods with large regions of absolute stability. J. Compt. Appl. Math. 2003, 157, 125–137. [Google Scholar] [CrossRef] [Green Version]
- Chollom, J.P.; Onumanyi, P. Variable order A-stable Adams Moulton type block hybrid methods for solution of stiff first order ODEs. J. Math. Assoc. Niger. Abacus (31) B 2004, 2, 177–192. [Google Scholar]
- Jator, S.N. Leaping type of algorithm for parabolic partial differential equations. JMS Natl. Math. Cent. Abuja Niger. 2013, 2, 149–172. [Google Scholar]
- Gragg, W.B.; Stetter, H.J. Generalized multistep predictor-corrector methods. J. Assoc. Comput. Mach. 1964, 11, 188–209. [Google Scholar] [CrossRef]
- Butcher, J.C. Modified multistep method for the numerical integration of ordinary differential equations. J. Assoc. Comput. Mach. 1965, 12, 124–135. [Google Scholar] [CrossRef]
- Butcher, J.C. A multistep generalization of Runge-Kutta method with four or five stages. J. Ass. Comput. Mach. 1967, 14, 84–99. [Google Scholar] [CrossRef]
- Gear, W.C. Hybrid multistep method for initial value in ordinary differential equations. J. SIAM Numer. Anal. 1965, 2, 69–86. [Google Scholar]
- Urabe, M. An implicit one-step method of high-order accuracy for the numerical integration of ordinary differential equations. J. Numer. Math. 1970, 15, 151–164. [Google Scholar] [CrossRef]
- Mitsui, T. A modified version of Urabe’s implicit single-step method. J. Comp. Appl. Math. 1987, 20, 325–332. [Google Scholar] [CrossRef] [Green Version]
- Cash, J.R. High order methods for the numerical integration of ordinary differential equations. Numer. Math. 1978, 30, 385–409. [Google Scholar] [CrossRef]
- Gupta, G.K. Implementing second-derivative multistep methods using the Nordsieck polynomial representation. J. Math. Comput. 1978, 32, 13–18. [Google Scholar] [CrossRef]
- Shintani, H. On one-step methods utilizing the second derivative. Hiroshima Math. J. 1971, 1, 349–372. [Google Scholar] [CrossRef]
- Shintani, H. On explicit one-step methods utilizing the second derivative. Hiroshima Math. J. 1972, 2, 353–368. [Google Scholar] [CrossRef]
- Mitsui, T. Runge-Kutta type integration formulas including the evaluation of the second-derivative, Part I. Publ. Res. Inst. Math. Sci. 1982, 18, 325–364. [Google Scholar] [CrossRef] [Green Version]
- Chan, R.P.K.; Tsai, A.Y.J. On explicit two-derivative Runge-Kutta methods. Numer. Algorithm 2010, 53, 171–194. [Google Scholar] [CrossRef]
- Marian, D.; Ciplea, S.A.; Lungu, N. On the Ulam-Hyers Stability of Biharmonic Equation. Univ. Politeh. Buchar. Sci. Bull.-Ser. A-Appl. Math. Phys. 2020, 8, 141–148. [Google Scholar]
- Shokri, A. The Symmetric P-Stable Hybrid Obrenchkoff Methods for the numerical solution of second Order IVPS. TWMS J. Pure Appl. Math. 2012, 5, 28–35. [Google Scholar]
- Shokri, A. An explicit trigonometrically fitted ten-step method with phase-lag of order infinity for the numerical solution of the radial Schrödinger equation. J. Appl. Comput. Math. 2015, 14, 63–74. [Google Scholar]
- Shokri, A.; Saadat, H. P-stability, TF and VSDPL technique in Obrechkoff methods for the numerical solution of the Schrödinger equation. Bull. Iran. Math. Soc. 2016, 42, 687–706. [Google Scholar]
- Marian, D.; Ciplea, S.A.; Lungu, N. Ulam-Hyers stability of Darboux-Ionescu problem. Carpathian J. Math. 2021, 37, 211–216. [Google Scholar] [CrossRef]
- Sunday, J.; Shokri, A.; Marian, D. Variable step hybrid block method for the approximation of Kepler problem. Fractal Fract. 2022, 6, 343. [Google Scholar] [CrossRef]
- Kwami, A.M.; Kumleng, G.M.; Kolo, A.M.; Yakubu, D.G. Block hybrid multistep methods for the numerical integration of stiff systems of ordinary differential equations arising from chemical reactions. Abacus J. Math. Assoc. Nig. 2015, 42, 134–164. [Google Scholar]
- Singh, G.; Garg, A.; Kanwar, V.; Ramos, H. An efficient optimized adaptive step-size hybrid block method for integrating differential systems. Appl. Math. Comp. 2019, 362, 124567. [Google Scholar] [CrossRef]
- Yakubu, D.G.; Aminu, M.; Tumba, P.; Abdulhameed, M. An efficient family of second-derivative Runge-Kutta collocation methods for oscillatory systems. J. Nig. Math. Soc. 2018, 37, 111–138. [Google Scholar]
- Chu, M.T.; Hamilton, H. Parallel solution of ordinary differential equations by multi-block methods. SIAM J. Sci. Stat. Comp. 1987, 8, 342–353. [Google Scholar] [CrossRef]
- Yakubu, D.G.; Aminu, M.; Aminu, A. The numerical integration of stiff systems using stable multistep multi-derivative methods. Mod. Meth. Numer. Math. 2017, 8, 99–117. [Google Scholar] [CrossRef] [Green Version]
- Fatunla, S.O. Block methods for second order ODEs. Intern. J.Comput. Math. 1991, 41, 55–63. [Google Scholar] [CrossRef]
- Lambert, J.D. Computational Methods in Ordinary Differential Equations; John Willey and Sons: New York, NY, USA, 1973. [Google Scholar]
- Lambert, J.D. Numerical Methods for Ordinary Differential Systems; John Wiley: New York, NY, USA, 1991. [Google Scholar]
- Burrage, K.; Butcher, J.C. Non-linear stability for a general class of differential equation method. BIT Numer. Math. 1980, 20, 185–203. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations, 2nd ed.; John Wiley & Sons, Ltd.: New York, NY, USA, 2008. [Google Scholar]
- Enright, W.H. Second derivative multistep methods for stiff ordinary differential equations. SIAM J. Numer. Anal. 1974, 11, 321–341. [Google Scholar] [CrossRef]
- Gear, W.C. DIFSUB for Solution of ordinary differential equations. Comm. ACM 1971, 14, 185–190. [Google Scholar] [CrossRef]
- Fatunla, S.O. Numerical integrators for stiff and highly oscillatory differential equations. J. Math. Comput. 1980, 34, 373–390. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Order | Error Constants |
|---|---|---|
| Block method (18) | (i) yn + u, P = 7 | C8 = 4.4403 × 10−5 |
| (ii) yn + 1, P = 7 | C8 = 3.3068 × 10−5 | |
| (iii) yn + v, P = 7 | C8 = 3.9236 × 10−5 | |
| (iv) yn + 2, P = 7 | C8 = 3.3068 × 10−5 | |
| (v) yn + w, P = 7 | C8 = 4.4403 × 10−5 | |
| (vi) yn + 3, P = 8 | C9 = 1.2555 × 10−5 | |
| Uniform order block method (21) | (i) yn + u, P = 14 | C15 = 1.4789 × 10−12 |
| (ii) yn + 1, P = 14 | C15 = 1.5718 × 10−12 | |
| (iii) yn + v, P = 14 | C15 = 1.5989 × 10−12 | |
| (iv) yn + 2, P = 14 | C15 = 1.6261 × 10−12 | |
| (v) yn + w, P = 14 | C15 = 1.7190 × 10−12 | |
| (vi) yn + 3, P = 14 | C15 = 3.1979 × 10−12 |
| x | Method (18) | Method (21) | |
|---|---|---|---|
| 1.223052805026881 × 10−3 | 1.228938367083599 × 10−3 | ||
| 5 | 1.290570363021715 × 10−6 | 1.800318343625484 × 10−6 | |
| 3.320709446422848 × 10−5 | 3.325679258575631 × 10−5 | ||
| 50 | 9.887815172193726 × 10−8 | 5.804723043345561 × 10−7 | |
| 3.619658989642897 × 10−12 | 3.622719245691676 × 10−12 | ||
| 250 | 2.523305960607913 × 10−11 | 2.101212666995355 × 10−10 | |
| 7.167561881971770 × 10−21 | 7.173620185942641 × 10−21 | ||
| 500 | 1.122741130992365 × 10−15 | 9.350493168888896 × 10−15 |
| x | Method (18) | Method (21) | |
|---|---|---|---|
| 0 | 0 | ||
| 5 | 1.110223024625157 × 10−16 | 1.110223024625157 × 10−16 | |
| 7.993605777301127 × 10−15 | 0 | ||
| 5.551115123125783 × 10−17 | 4.163336342344337 × 10−17 | ||
| 50 | 3.330669073875470 × 10−16 | 3.330669073875470 × 10−16 | |
| 1.038058528024521 × 10−14 | 0 | ||
| 2.220446049250313 × 10−16 | 1.110223024625157 × 10−16 | ||
| 250 | 1.110223024625157 × 10−16 | 1.110223024625157 × 10−16 | |
| 3.330669073875470 × 10−16 | 1.665334536937735 × 10−16 | ||
| 4.440892098500626 × 10−16 | 3.330669073875470 × 10−16 | ||
| 500 | 2.220446049250313 × 10−16 | 1.110223024625157 × 10−16 | |
| 3.330669073875470 × 10−16 | 2.220446049250313 × 10−16 |
| x | Method (18) | Method (21) | |
|---|---|---|---|
| 0 | 0 | ||
| 5 | 0 | 0 | |
| 0 | 0 | ||
| 1.110223024625157 × 10−16 | 1.110223024625157 × 10−16 | ||
| 2.220446049250313 × 10−16 | 2.220446049250313 × 10−16 | ||
| 50 | 4.440892098500626 × 10−16 | 4.440892098500626 × 10−16 | |
| 1.110223024625157 × 10−16 | 1.110223024625157 × 10−16 | ||
| 2.220446049250313 × 10−16 | 1.110223024625157 × 10−16 | ||
| 5.551115123125783 × 10−16 | 5.551115123125783 × 10−16 | ||
| 250 | 7.771561172376096 × 10−16 | 7.771561172376096 × 10−16 | |
| 7.771561172376096 × 10−16 | 1.110223024625157 × 10−16 | ||
| 5.204170427930421 × 10−18 | 5.204170427930421 × 10−18 | ||
| 2.220446049250313 × 10−16 | 2.220446049250313 × 10−16 | ||
| 500 | 5.551115123125783 × 10−16 | 5.551115123125783 × 10−16 | |
| 3.885780586188048 × 10−16 | 2.775557561562891 × 10−16 | ||
| 1.626303258728257 × 10−19 | 3.388131789017201 × 10−20 |
| x | yi | Method (18) | Method (21) |
|---|---|---|---|
| 2.024105327791403 × 10−10 | 2.220446049250313 × 10−16 | ||
| 4.056337835067758 × 10−10 | 1.318389841742373 × 10−16 | ||
| 5 | 0 | 0 | |
| 0 | 0 | ||
| 1.721994824510631 × 10−9 | 3.330669073875470 × 10−16 | ||
| 1.453979242560521 × 10−9 | 7.771561172376096 × 10−16 | ||
| 50 | 4.440892098500626 × 10−16 | 4.440892098500626 × 10−16 | |
| 0 | 1.110223024625157 × 10−16 | ||
| 2.077217382476237 × 10−10 | 6.591949208711867 × 10−17 | ||
| 1.233960850166582 × 10−11 | 1.734723475976807 × 10−18 | ||
| 250 | 2.775557561562891 × 10−17 | 8.326672684688674 × 10−17 | |
| 6.661338147750939 × 10−16 | 6.661338147750939 × 10−16 | ||
| 2.711908290569135 × 10−12 | 6.810144895924575 × 10−19 | ||
| 6.195955749334348 × 10−13 | 2.710505431213761 × 10−20 | ||
| 500 | 6.938893903907228 × 10−18 | 4.857225732735060 × 10−17 | |
| 3.885780586188048 × 10−16 | 3.330669073875470 × 10−16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yakubu, D.G.; Shokri, A.; Kumleng, G.M.; Marian, D. Second Derivative Block Hybrid Methods for the Numerical Integration of Differential Systems. Fractal Fract. 2022, 6, 386. https://doi.org/10.3390/fractalfract6070386
Yakubu DG, Shokri A, Kumleng GM, Marian D. Second Derivative Block Hybrid Methods for the Numerical Integration of Differential Systems. Fractal and Fractional. 2022; 6(7):386. https://doi.org/10.3390/fractalfract6070386
Chicago/Turabian StyleYakubu, Dauda Gulibur, Ali Shokri, Geoffrey Micah Kumleng, and Daniela Marian. 2022. "Second Derivative Block Hybrid Methods for the Numerical Integration of Differential Systems" Fractal and Fractional 6, no. 7: 386. https://doi.org/10.3390/fractalfract6070386
APA StyleYakubu, D. G., Shokri, A., Kumleng, G. M., & Marian, D. (2022). Second Derivative Block Hybrid Methods for the Numerical Integration of Differential Systems. Fractal and Fractional, 6(7), 386. https://doi.org/10.3390/fractalfract6070386