
A Theoretical and Numerical Study on Fractional Order Biological Models with Caputo Fabrizio Derivative



Abstract
:1. Introduction
2. Preliminaries
3. Existence Uniqueness of Results for Fractional Order Biological Model (1)
- Let be the exists function which is non-negative, ∋
- The function satisfies , where . Then model (1) has one solution.
- Consider a positive function exists, ∋also function satisfying
- Consider that , then model (1) has one solution.
4. Convergence of MDLDM for Considered System
5. Applications
Double Laplace Adomian Decomposition Method
6. Iterative Examples
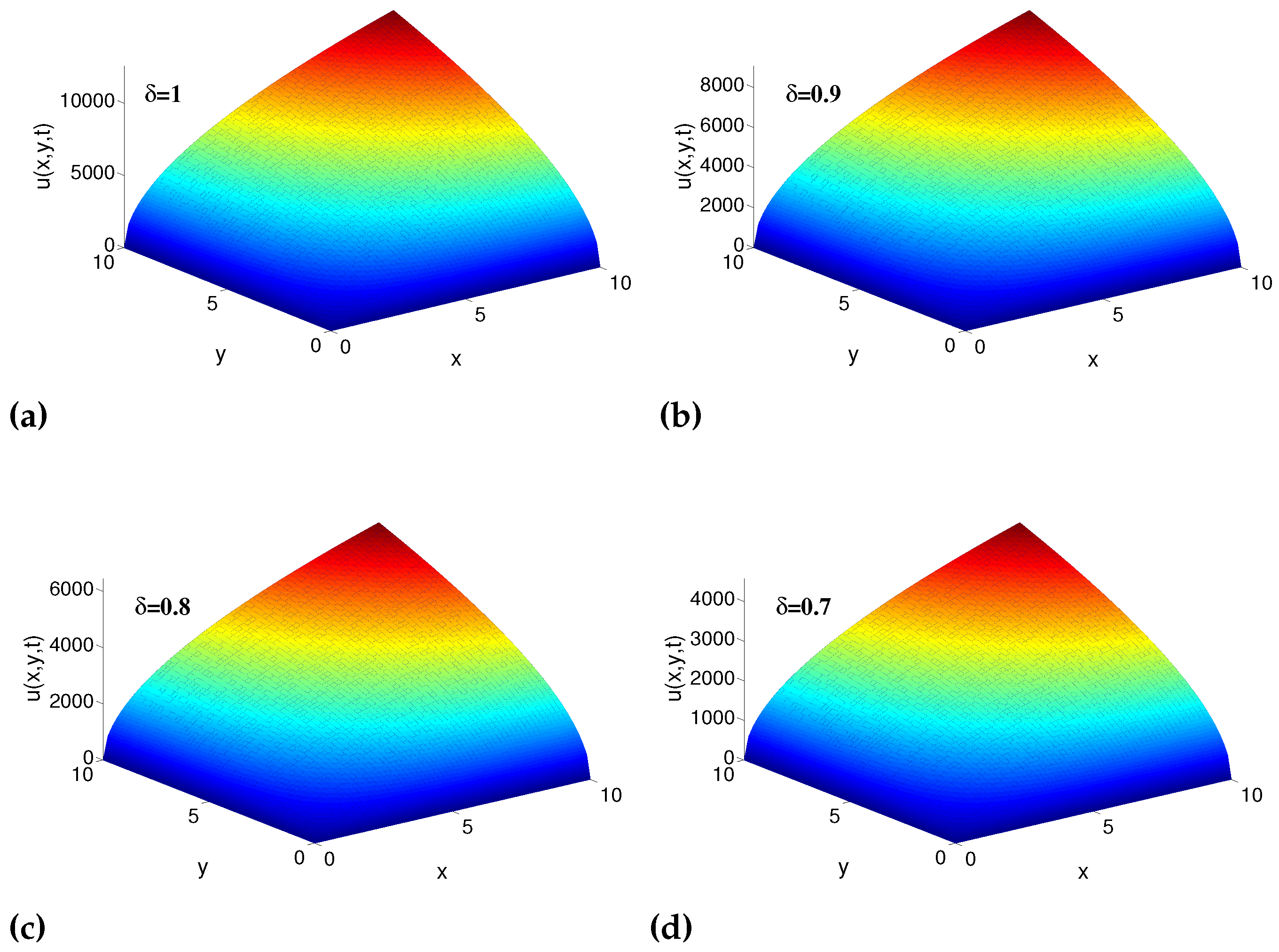
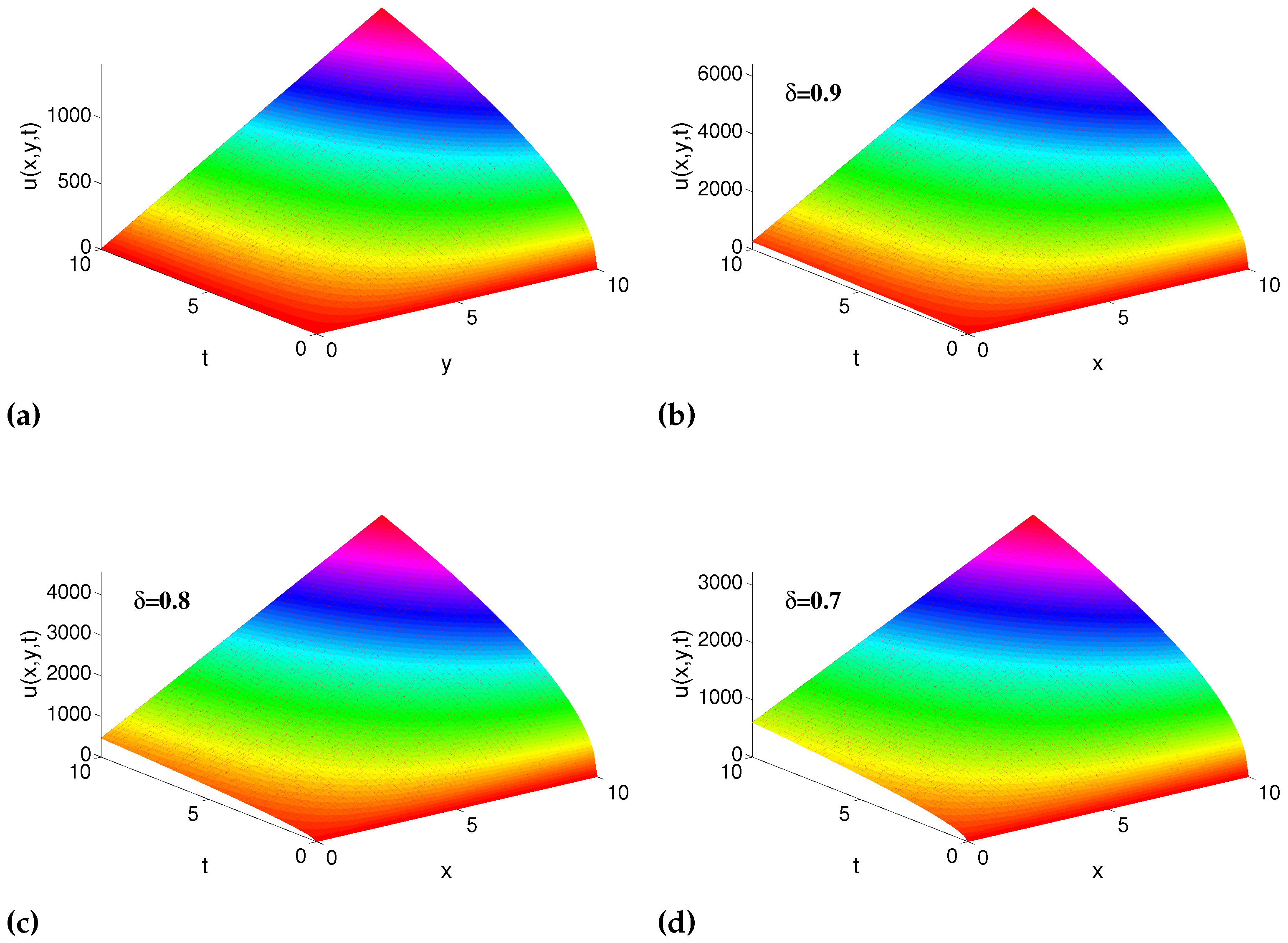
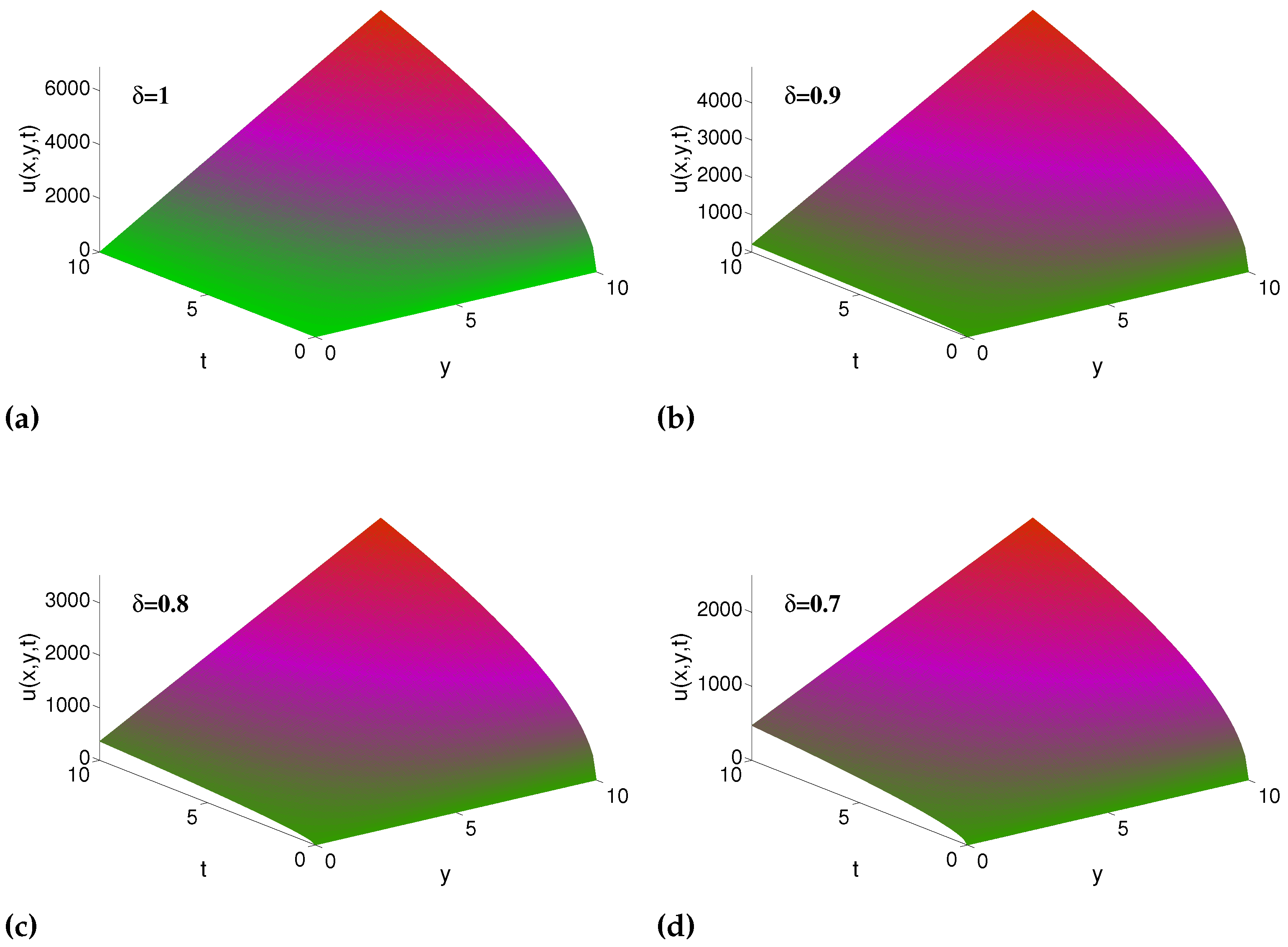
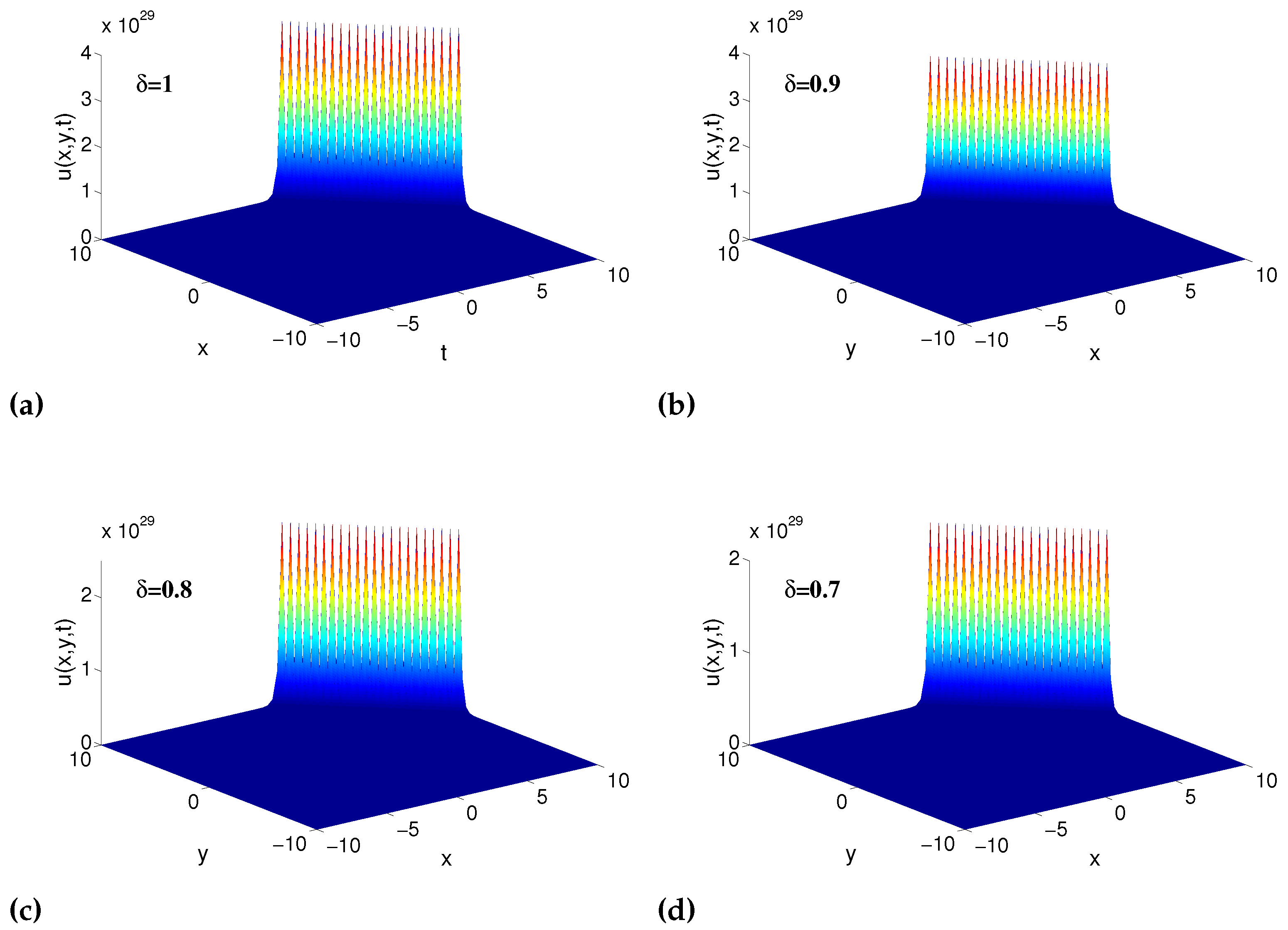
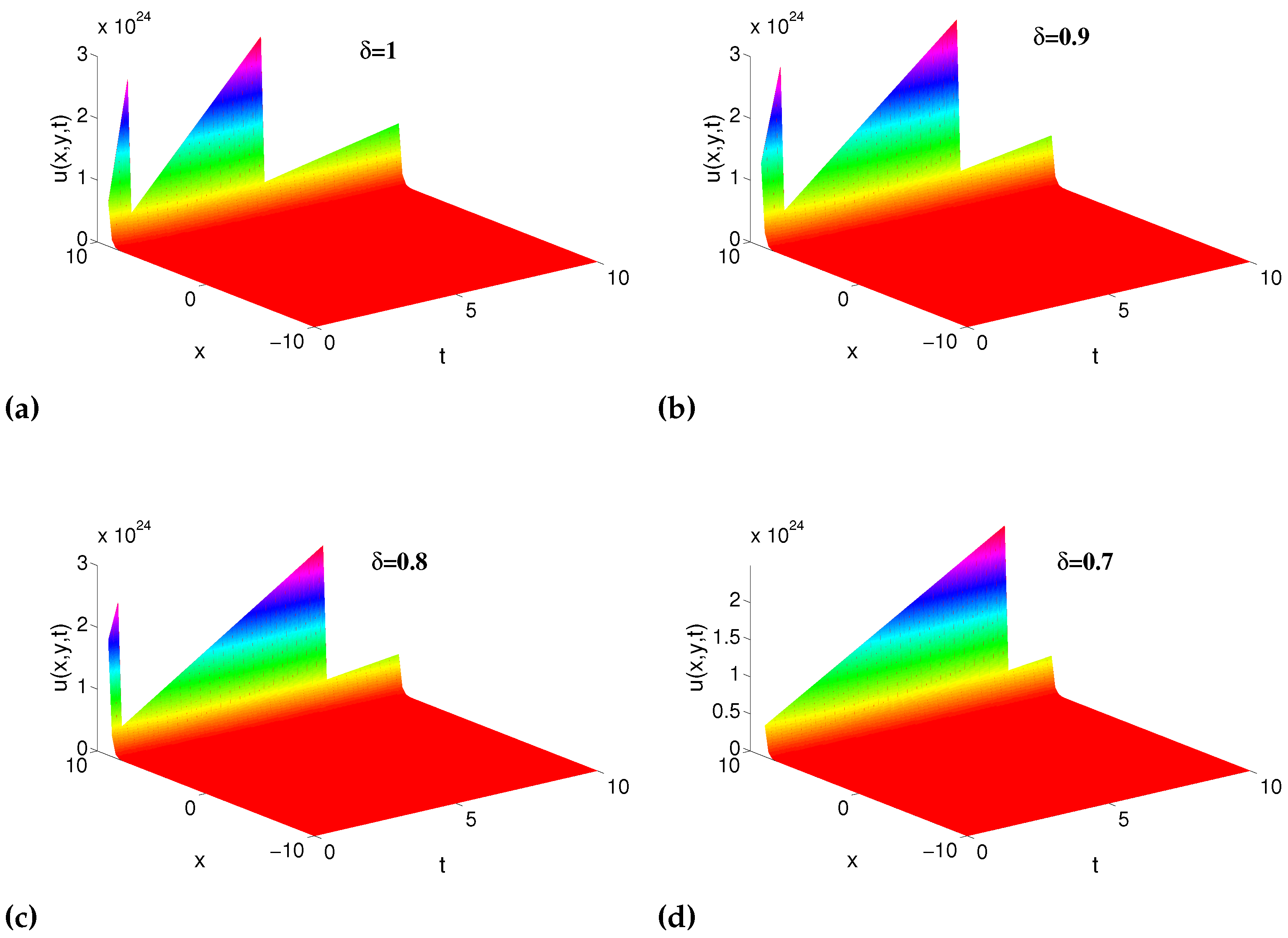
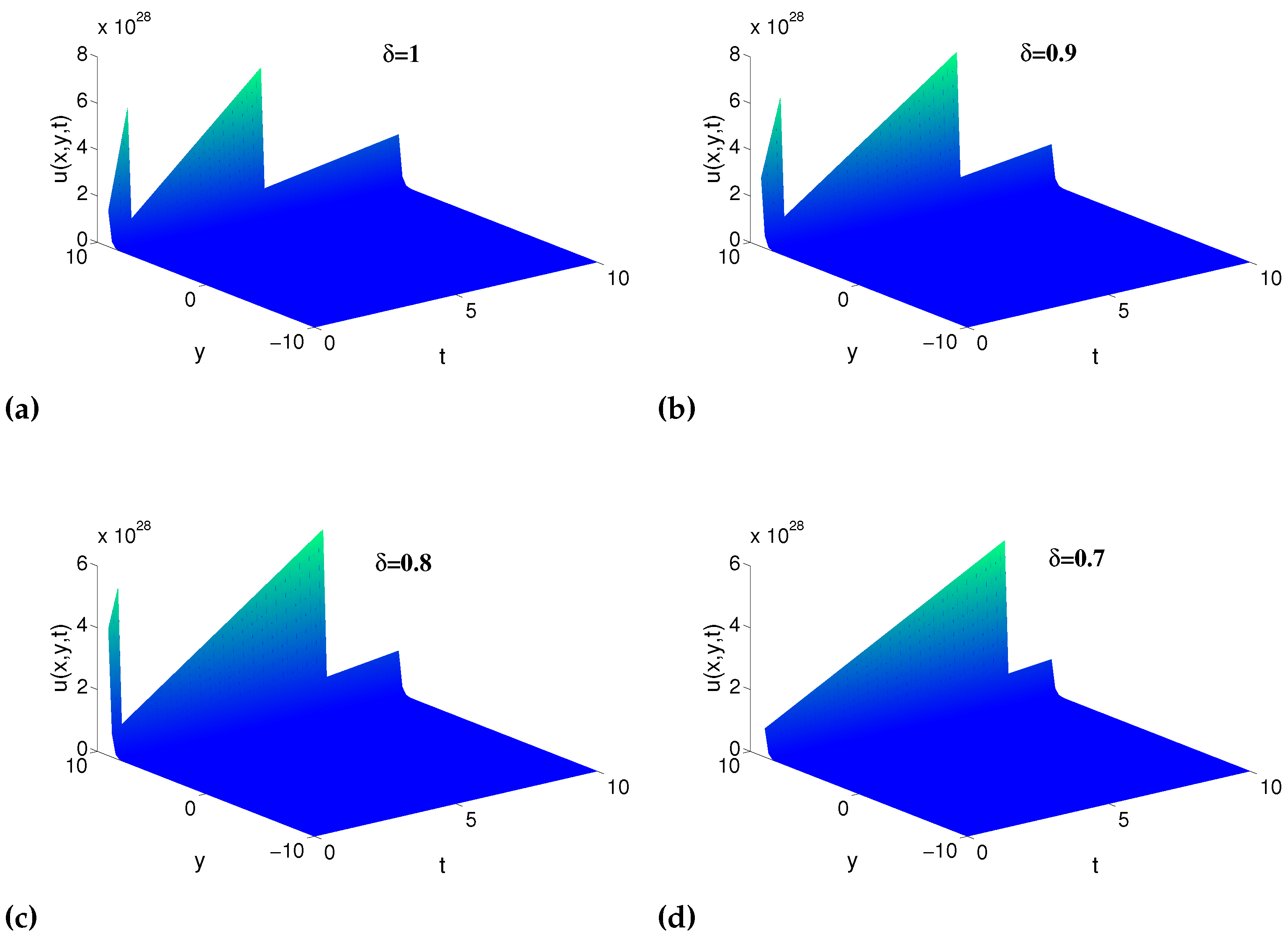
6.1. Numerical Plots and Comparison Tables
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gall, J.F. Brownian Motion and Partial Differential Equations Graduate Texts in Mathematics; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Merwin, K. Analysis of a partial differential equation and real world applications regarding water flow in the state of Florida. McNair Sch. Res. J. 2014, 1, 8. [Google Scholar]
- Oldham, K.B.; Spanier, J. The Fractional Calculus; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA; New York, NY, USA; London, UK, 1999. [Google Scholar]
- Hilfer, R. Application of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Zaslavsky, G.M. Hamiltonian Chaos and Fractional Dynamics; Oxford University Press: Oxford, UK, 2005. [Google Scholar]
- Magin, R.L. Fractional Calculus in Bio-Engineering; Begell House Publisher, Inc.: Connecticut, CT, USA, 2006. [Google Scholar]
- Debnath, L. Recent applications of fractional calculus to science and engineering. Int. J. Math. Math. Sci. 2003, 2003, 3413–3442. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new defi nition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel; Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Baleanu, D.; Fernandez, A.; Akgul, A. On a fractional operator combining proportional and classical differ-integrals. Mathematics 2020, 8, 360. [Google Scholar] [CrossRef]
- Kucche, K.D.; Sutar, S.T. Analysis of nonlinear fractional differential equations involving Atangana-Baleanu-Caputo Derivative. Chaos Solitons Fract. 2021, 143, 1–17. [Google Scholar] [CrossRef]
- Aydogan, S.; Baleanu, D.; Mousalou, A.; Rezapour, S. On approximate solutions for two higher order Caputo–Fabrizio fractional integro-differential equtions. Adv. Differ. Equ. 2017, 2017, 221. [Google Scholar] [CrossRef]
- Baleanu, D.; Mousalou, A.; Rezapour, S. On the existence of solutions for some infinite coefficient-symmetric Caputo–Fabrizio fractional integro-differential equations. Bound. Value Probl. 2017, 2017, 145. [Google Scholar] [CrossRef]
- El-Sayed, A.M.A.; Rida, S.Z.; Arafa, A.A.M. Exact solutions of fractional-order biological population model. Commun. Theor. Phys. 2009, 52, 992–996. [Google Scholar] [CrossRef]
- Kumar, D.; Singh, J.; Sushila, R. Application of homotopy analysis method to fractional biological population model. Rom. Rep. Phys. 2013, 65, 63–75. [Google Scholar]
- Ahmad, S.; Ullah, A.; Partohaghighi, M.; Saifullah, S.; Akgúl, A.; Jarad, F. Oscillatory and complex behaviour of Caputo-Fabrizio fractional order HIV-1 infection model. AIMS Math. 2022, 7, 4778–4792. [Google Scholar] [CrossRef]
- Saifullah, S.; Ali, A.; Irfan, M.; Shah, K. Time-Fractional Klein–Gordon Equation with Solitary/Shock Waves Solutions. Math. Prob. Eng. 2021, 2021, 6858592. [Google Scholar] [CrossRef]
- Kaabar, M.K.A.; Martínez, F.; Gómez-Aguilar, J.F.; Ghanbari, B.; Kaplan, M.; Günerhan, H. New approximate analytical solutions for the nonlinear fractional Schrödinger equation with second-order spatio-temporal dispersion via double Laplace transform method. Math. Methods Appl. Sci. 2021, 44, 11138–11156. [Google Scholar] [CrossRef]
- Khan, A.; Khan, T.S.; Syam, M.I.; Khan, H. Analytical solutions of time-fractional wave equation by double Laplace transform method. Eur. Phys. J. Plus 2019, 134, 163. [Google Scholar] [CrossRef]
- Sneddon, I.N. The Use of Integral Transforms; Tata McGraw Hill Edition: New Delhi, India, 1974. [Google Scholar]
- Losada, J.; Nieto, J.J. Properties of a new fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 87–92. [Google Scholar]
- Gadain, H.E. Application of double laplace ecomposition method for solving singular one dimentionla system of hyperbolic equations. J. Nonlinear Sci. Appl. 2017, 10, 111–121. [Google Scholar] [CrossRef]
- Kaya, D.; Inan, I.E. A convergence analysis of the ADM and an application. Appl. Math. Comput. 2005, 161, 1015–1025. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (x, y, t) | Exact | Approximate | Error |
|---|---|---|---|
| (1, 1, 0) | 1 | 1.0001 | |
| (1, 1, 1) | 31 | 31 | 0 |
| (2, 1, 2) | 86.2670 | 86.2670 | |
| (2, 2, 2) | 122 | 121.9998 | |
| (3, 2, 1) | 75.9342 | 75.9342 | 0 |
| (5, 2, 0) | 3.1623 | 3.1626 | |
| (3, 5, 1) | 120.0625 | 120.0625 | 0 |
| (7, 5, 3) | 538.3633 | 538.3621 | 0.0012 |
| (1, 3, 0) | 1.7321 | 1.7322 | |
| (10, 10, 1) | 310 | 310 | 0 |
| (10, 10, 0) | 10 | 10.0010 | |
| (9, 2, 3) | 386.0803 | 386.0795 | |
| (4, 4, 1) | 124 | 124 | 0 |
| (4, 8, 4) | 684.4794 | 684.4777 | 0.0017 |
| (8, 9, 5) | 0.0033 | ||
| (9, 8, 1) | 263.0437 | 263.0437 | 0 |
| (0.5, 1, 1) | 21.9203 | 21.9203 | 0 |
| (0.2, 1, 0) | 0.4472 | 0.4473 | |
| (0.1, 0.1, 0) | 0.1000 | 0.1000 |
| (x, y, t) | Exact | Approximate | Error |
|---|---|---|---|
| (−10,−10, 0) | |||
| (−10, −10, 1) | 0 | ||
| (−6, −6, 0) | |||
| (−6, −6, 1) | 0 | ||
| (0, −2, 2) | |||
| (0, 2, 2) | |||
| (−10, 0, 10) | |||
| (−10, 1, 10) | |||
| (−8, 0, 8) | |||
| (8, 1, 8) | |||
| (−2, 0, 2) | |||
| (2, 0, 2) | 0.0606 | 0.0600 | |
| (−1, −1, 0) | |||
| (1, 1, 1) | 0 | ||
| (2, −2, 0) | 1 | 1.0990 | 0.0990 |
| (−3, −1, 2) | |||
| (0, −2, 1) | 0 | ||
| (2, 0, 0) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.u.; Althobaiti, A.; Riaz, M.B.; Al-Duais, F.S. A Theoretical and Numerical Study on Fractional Order Biological Models with Caputo Fabrizio Derivative. Fractal Fract. 2022, 6, 446. https://doi.org/10.3390/fractalfract6080446
Rahman Mu, Althobaiti A, Riaz MB, Al-Duais FS. A Theoretical and Numerical Study on Fractional Order Biological Models with Caputo Fabrizio Derivative. Fractal and Fractional. 2022; 6(8):446. https://doi.org/10.3390/fractalfract6080446
Chicago/Turabian StyleRahman, Mati ur, Ali Althobaiti, Muhammad Bilal Riaz, and Fuad S. Al-Duais. 2022. "A Theoretical and Numerical Study on Fractional Order Biological Models with Caputo Fabrizio Derivative" Fractal and Fractional 6, no. 8: 446. https://doi.org/10.3390/fractalfract6080446
APA StyleRahman, M. u., Althobaiti, A., Riaz, M. B., & Al-Duais, F. S. (2022). A Theoretical and Numerical Study on Fractional Order Biological Models with Caputo Fabrizio Derivative. Fractal and Fractional, 6(8), 446. https://doi.org/10.3390/fractalfract6080446