


Characteristic Analysis and Circuit Implementation of a Novel Fractional-Order Memristor-Based Clamping Voltage Drift



Abstract
:1. Introduction
2. Fractional-Order Chaotic Memristor Circuit and Model
2.1. Fractional-Order Calculus
2.2. Fractional-Order Memristor Model and Circuit
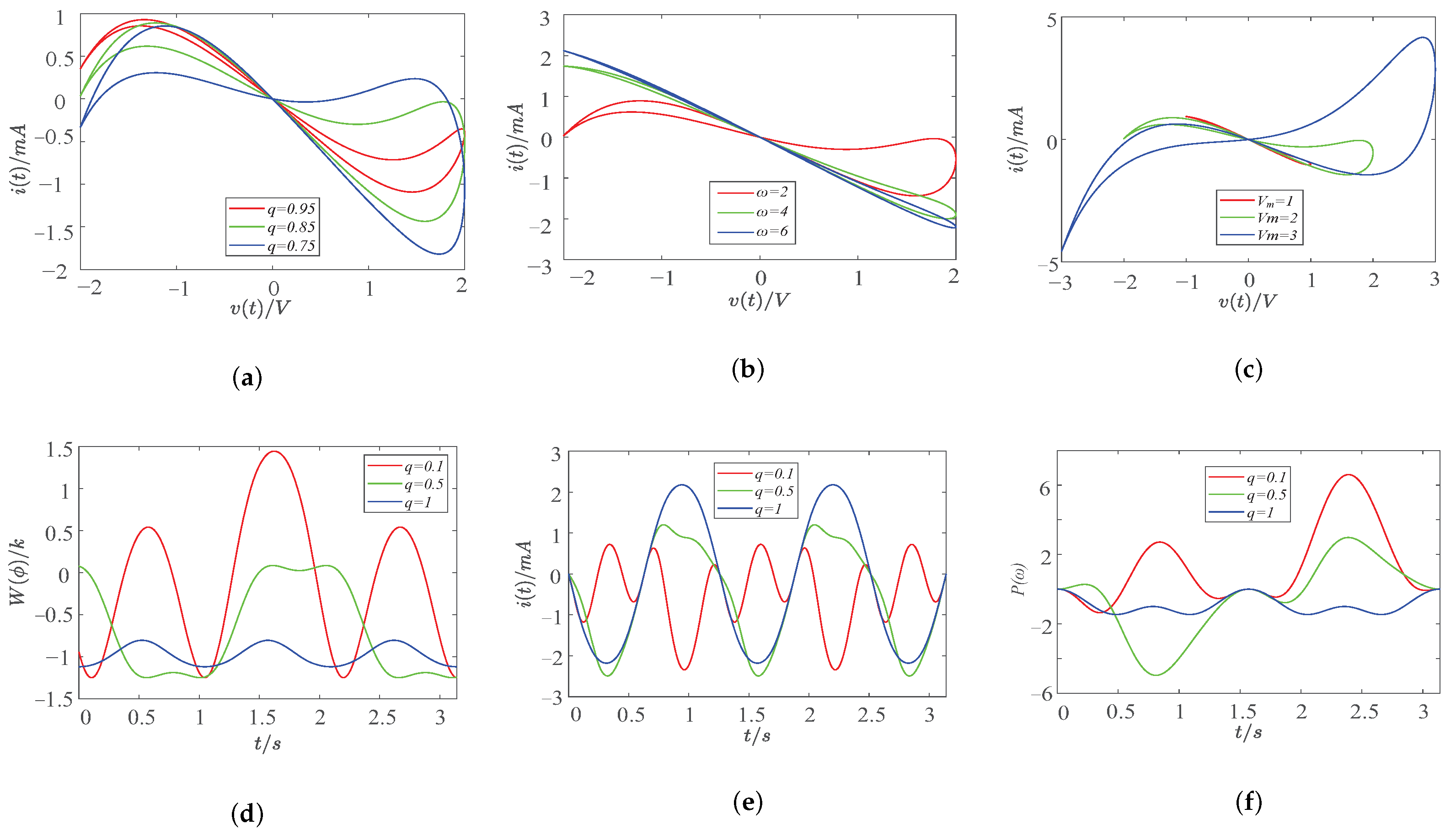
2.2.1. Magnetic Flux-Controlled Memristor Model
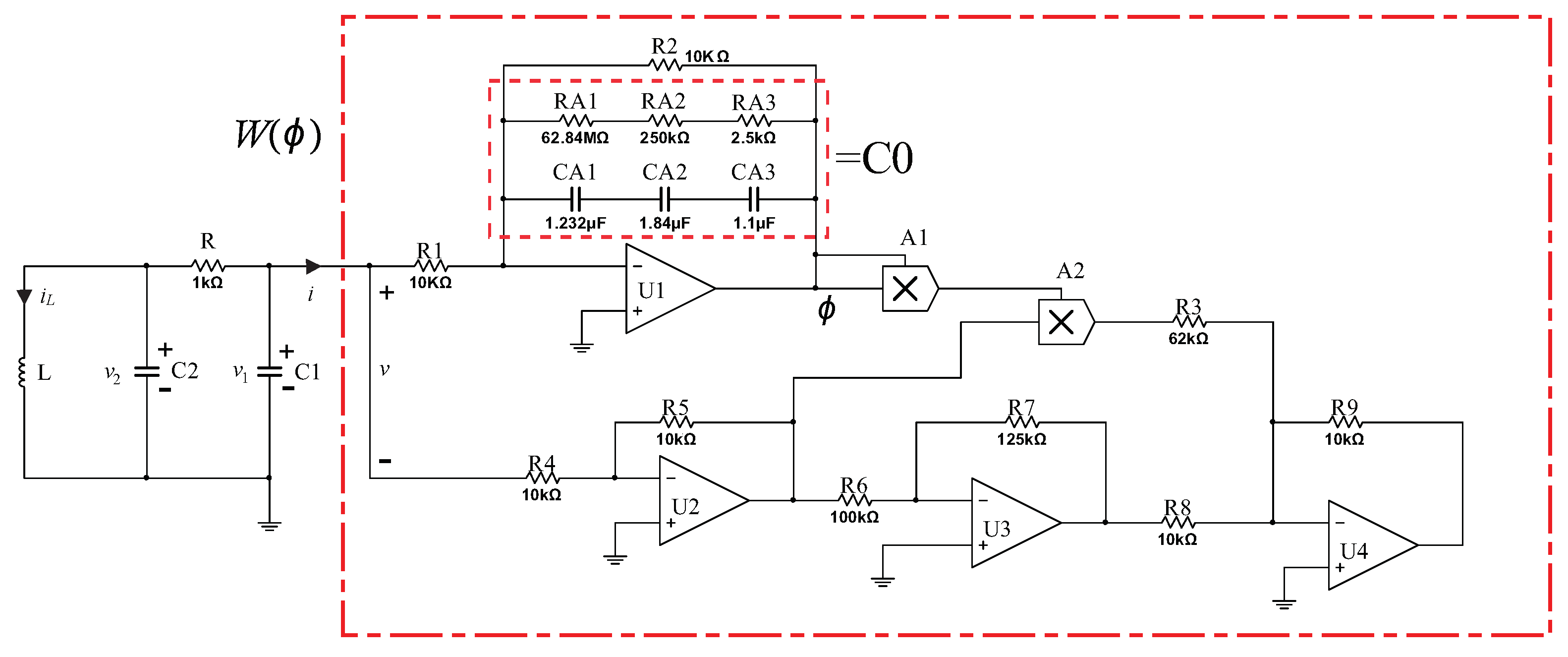
2.2.2. Implementation of Chaotic Circuit
2.2.3. Dynamical Chaotic Circuit Model
2.3. Adomian Decomposition Algorithm and Solution
2.3.1. Adomian Decomposition Algorithm
2.3.2. Decomposition Form of Solution
3. Dynamical Analysis
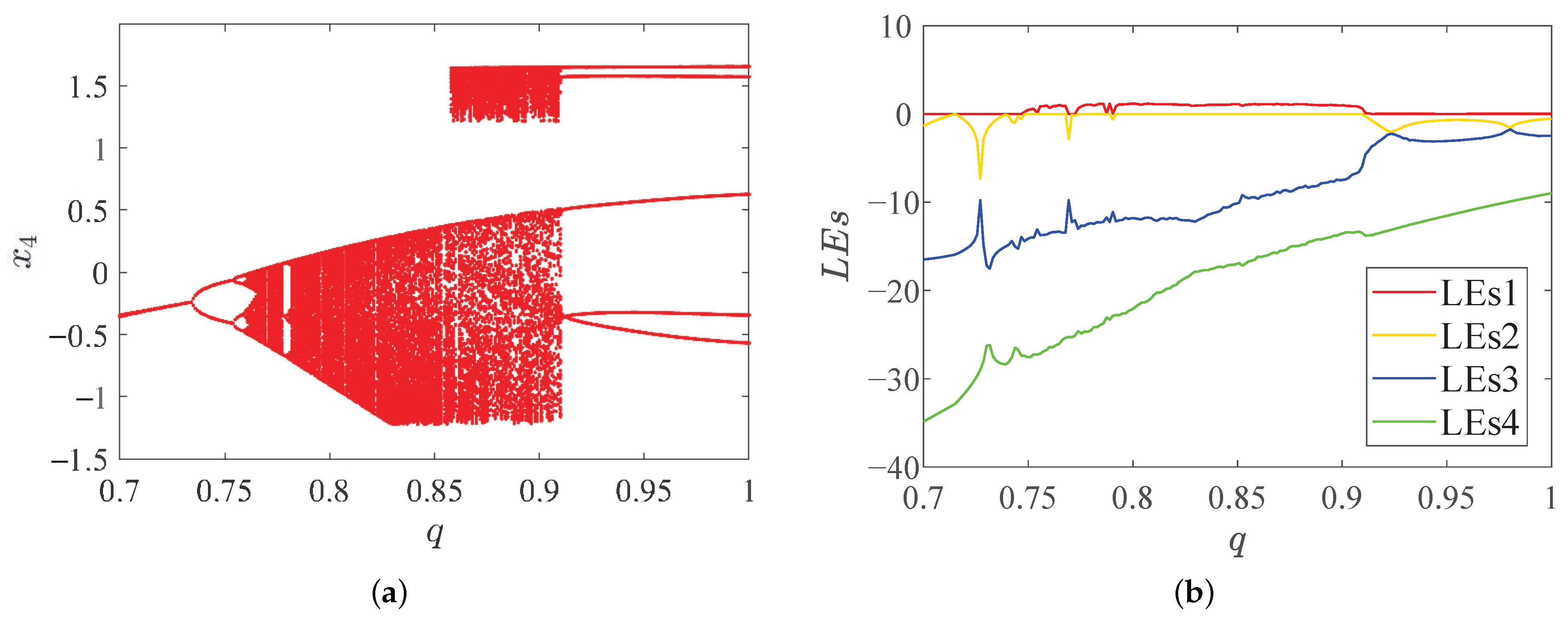
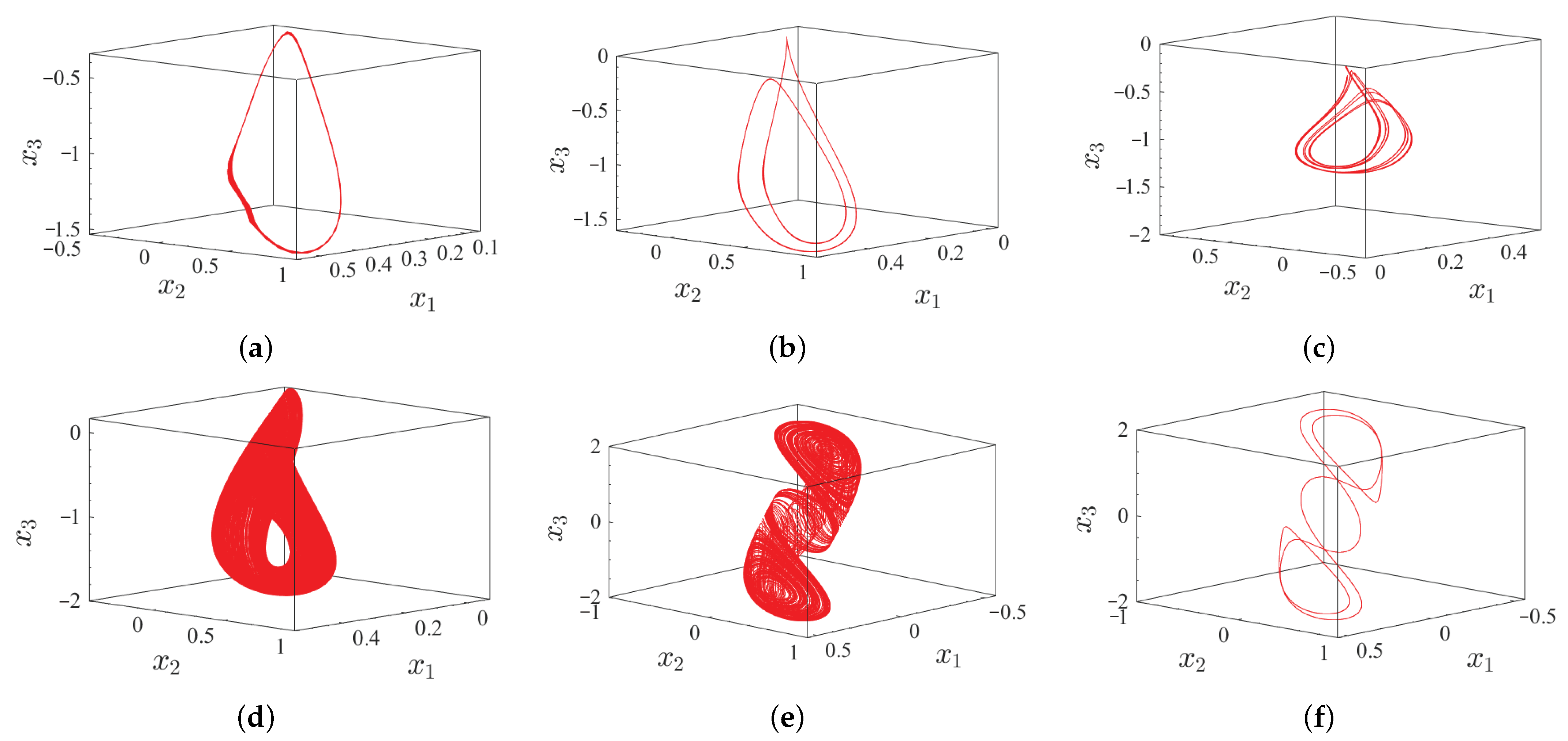
3.1. Dynamical Analysis with Fractional Orders q
3.2. Dynamical Analysis with Parameters
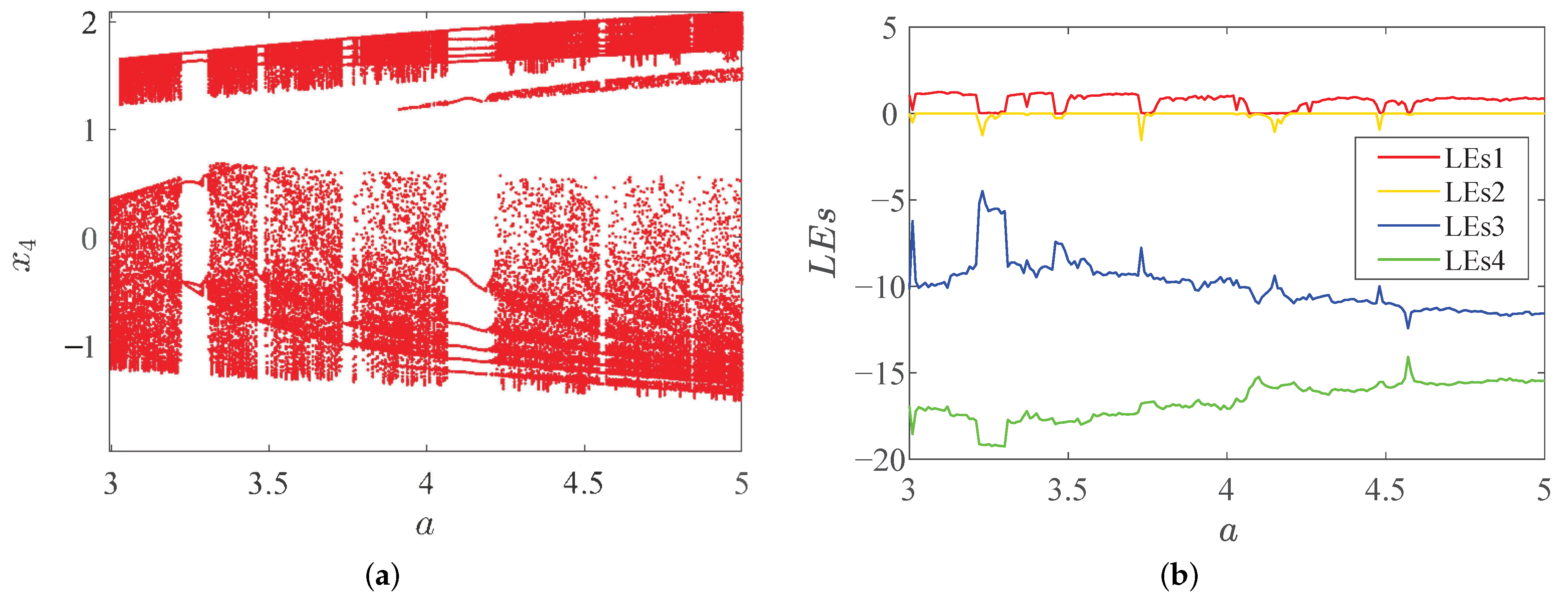
3.2.1. Parameter a as the Variable
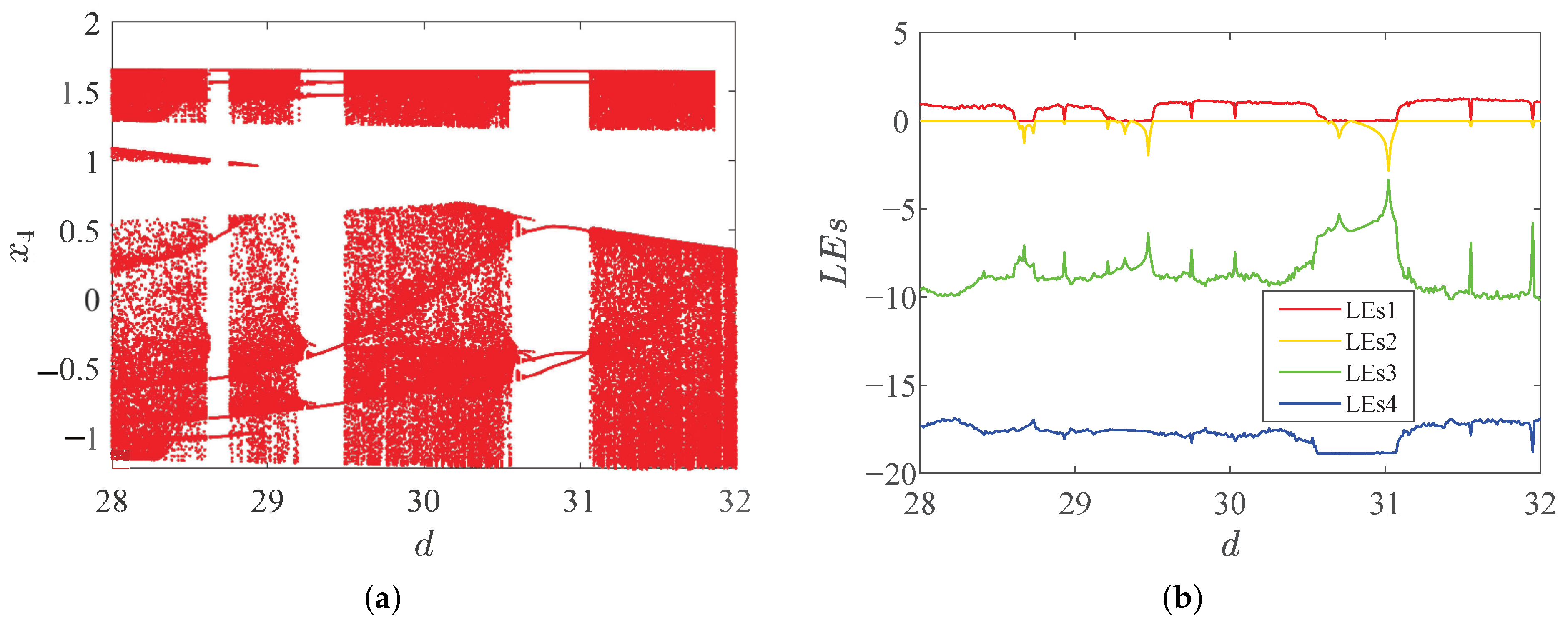
3.2.2. Parameter d as the Variable
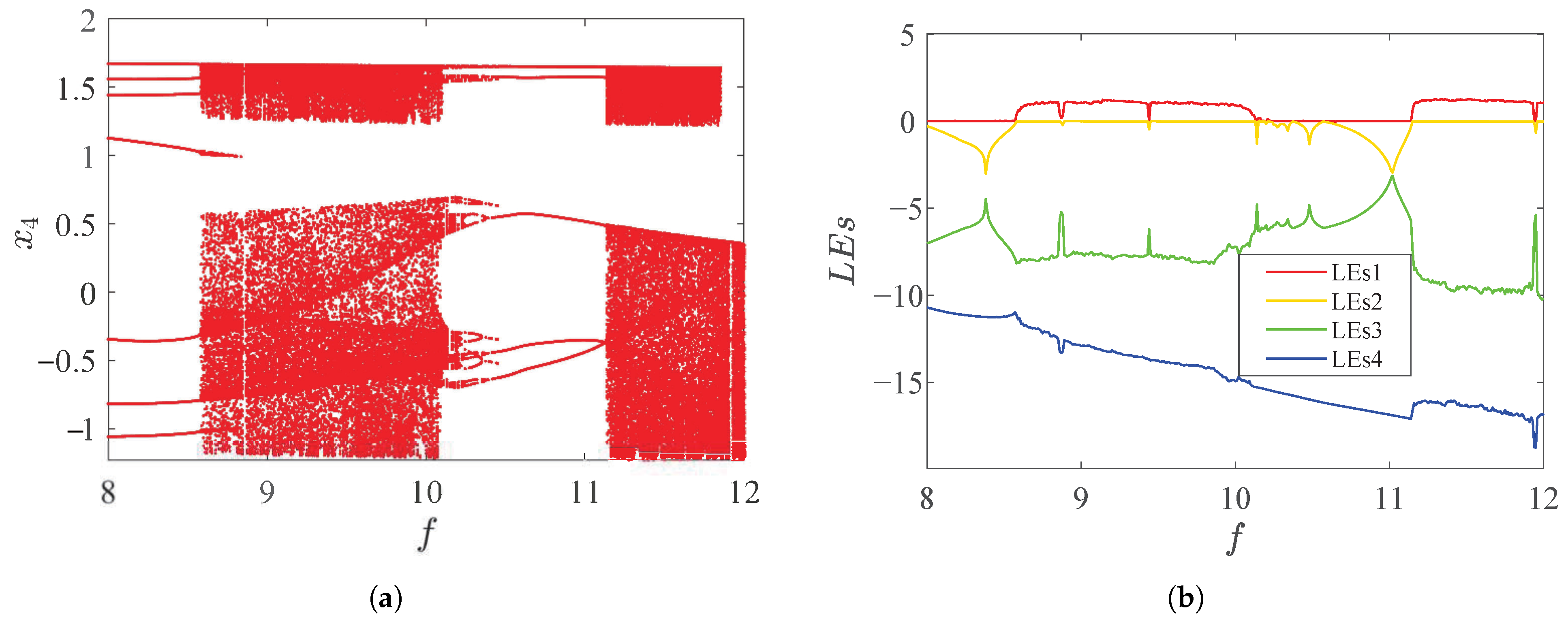
3.2.3. Parameter f as the Variable
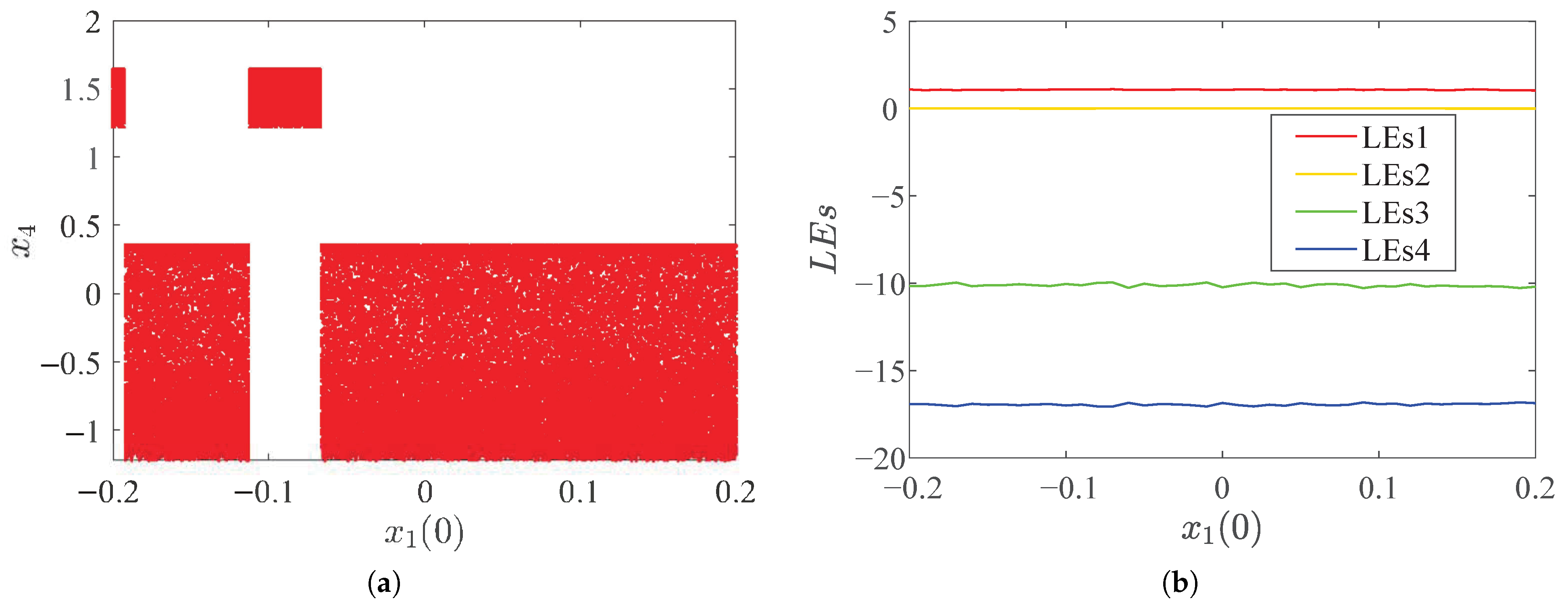
3.3. Dynamical Analysis with Initial Value
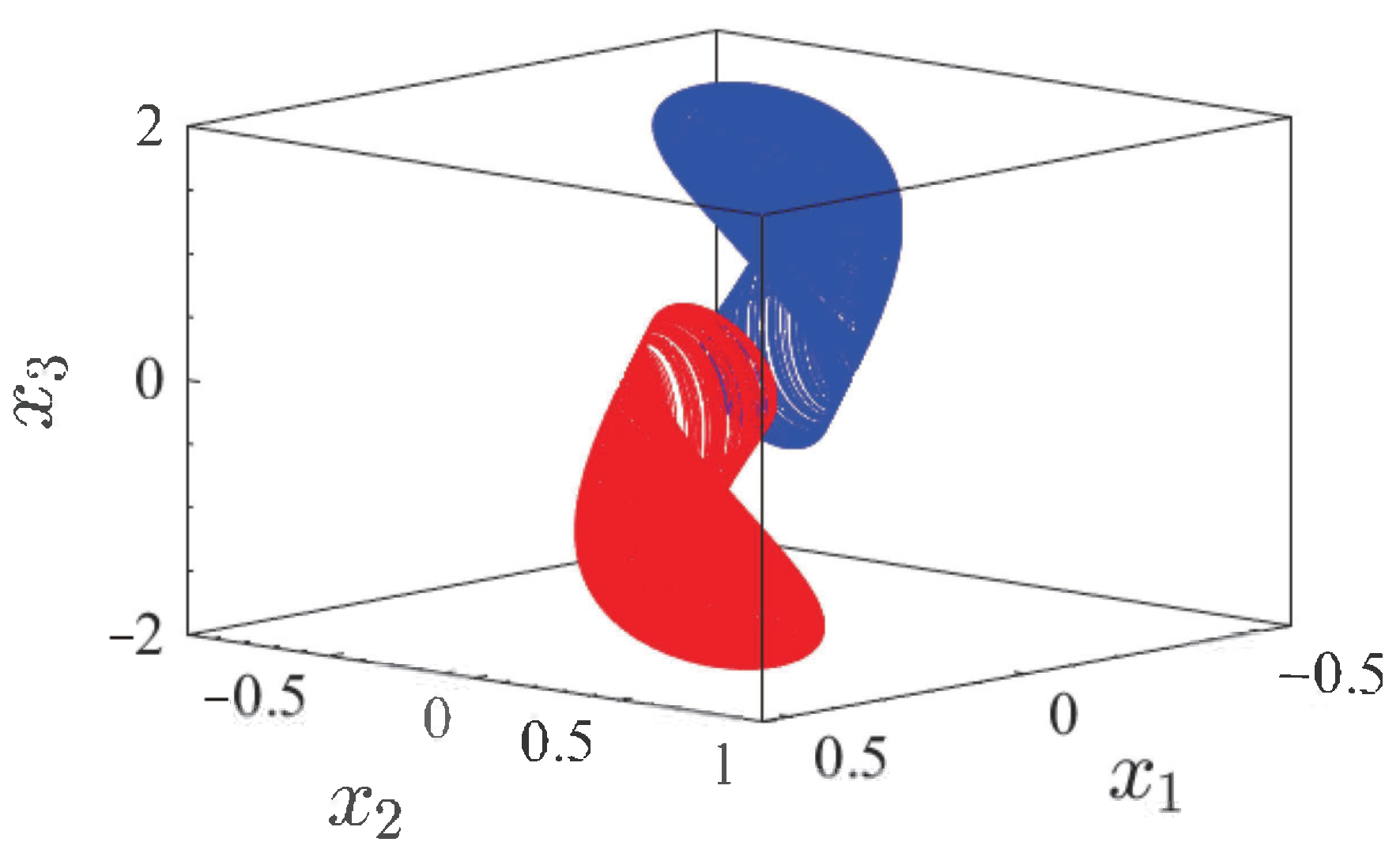
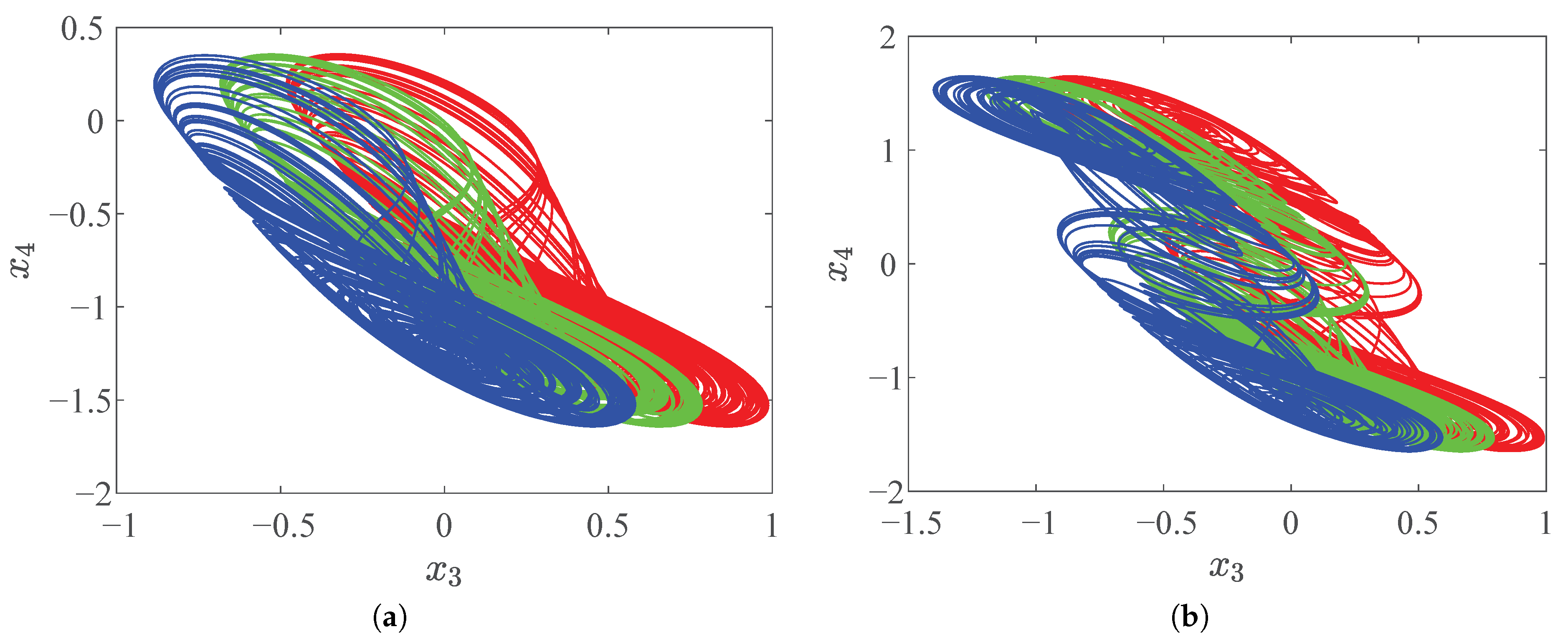
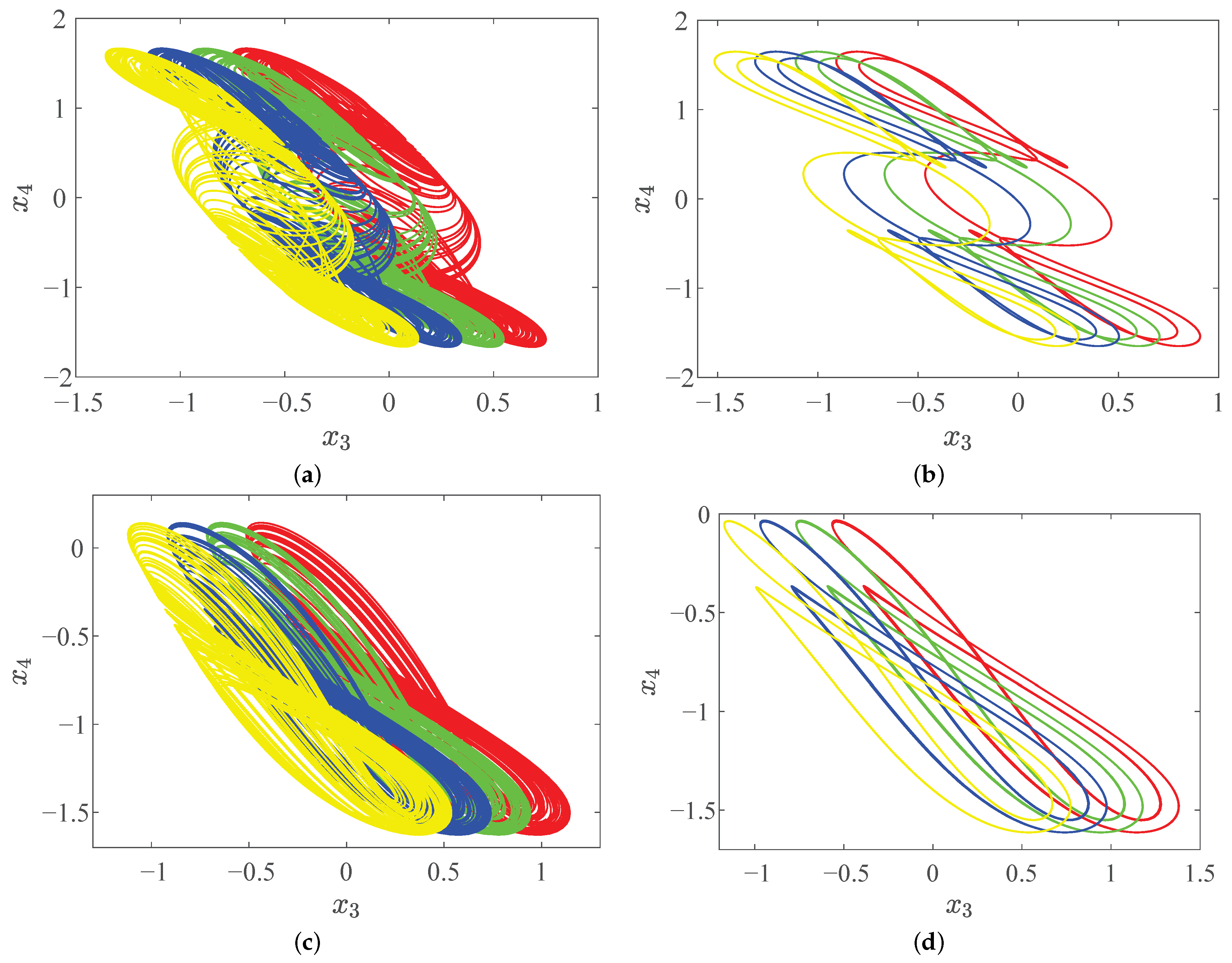
3.4. Offset Boosting
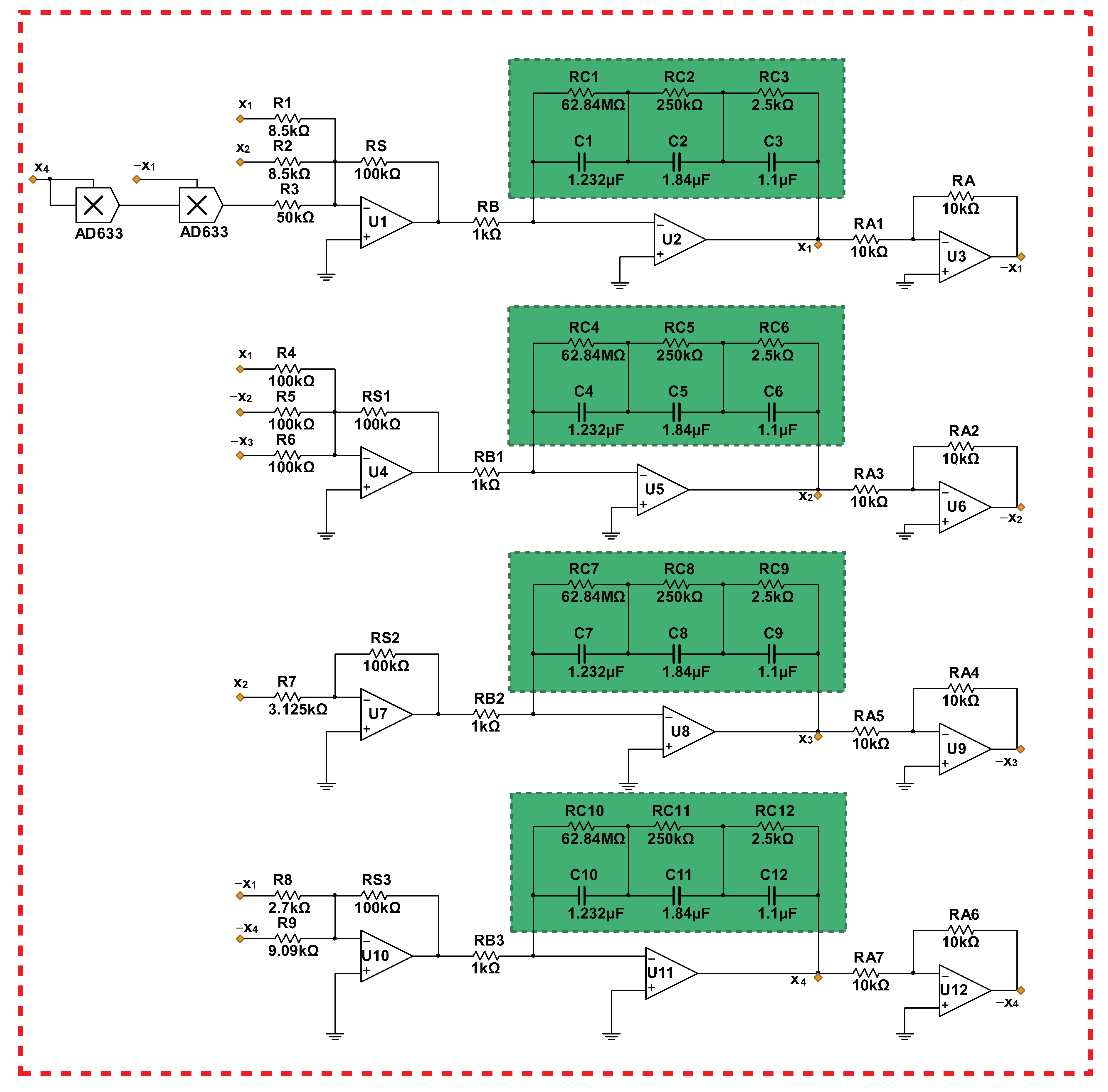
4. System Circuit Implementation
4.1. Laplace Transform of Fractional-Order Memristor Circuit
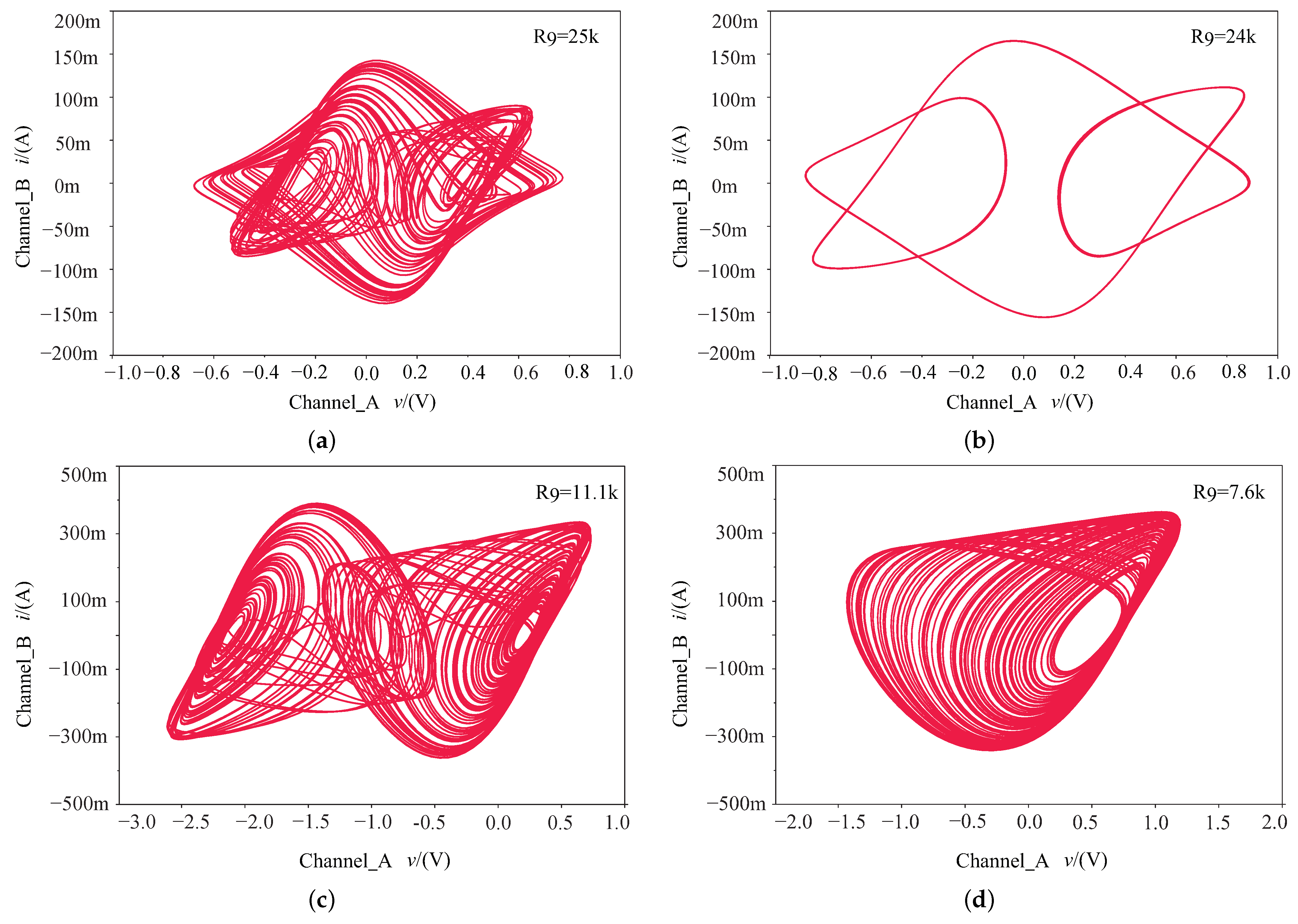
4.2. Circuit Simulation and FPGA Implementation
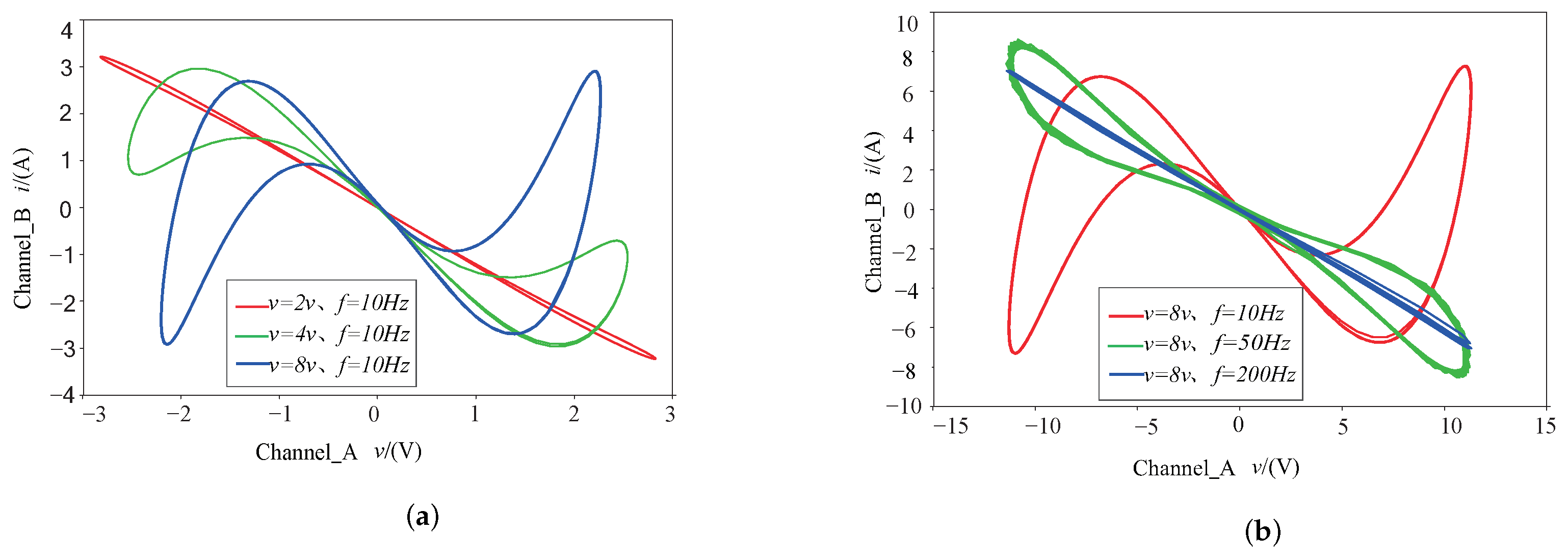
4.2.1. Analog Circuit Simulation
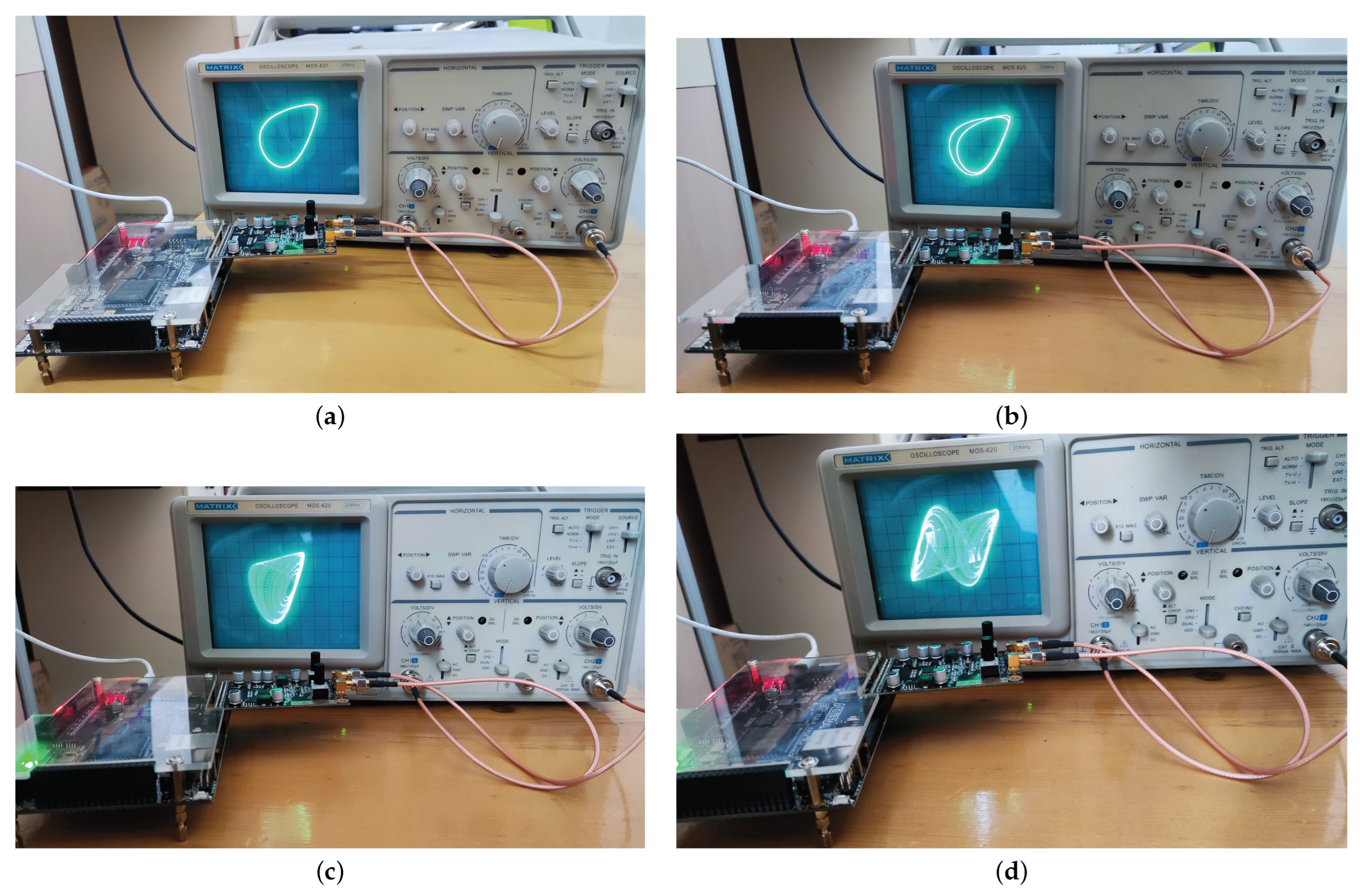
4.2.2. FPGA System Implementation
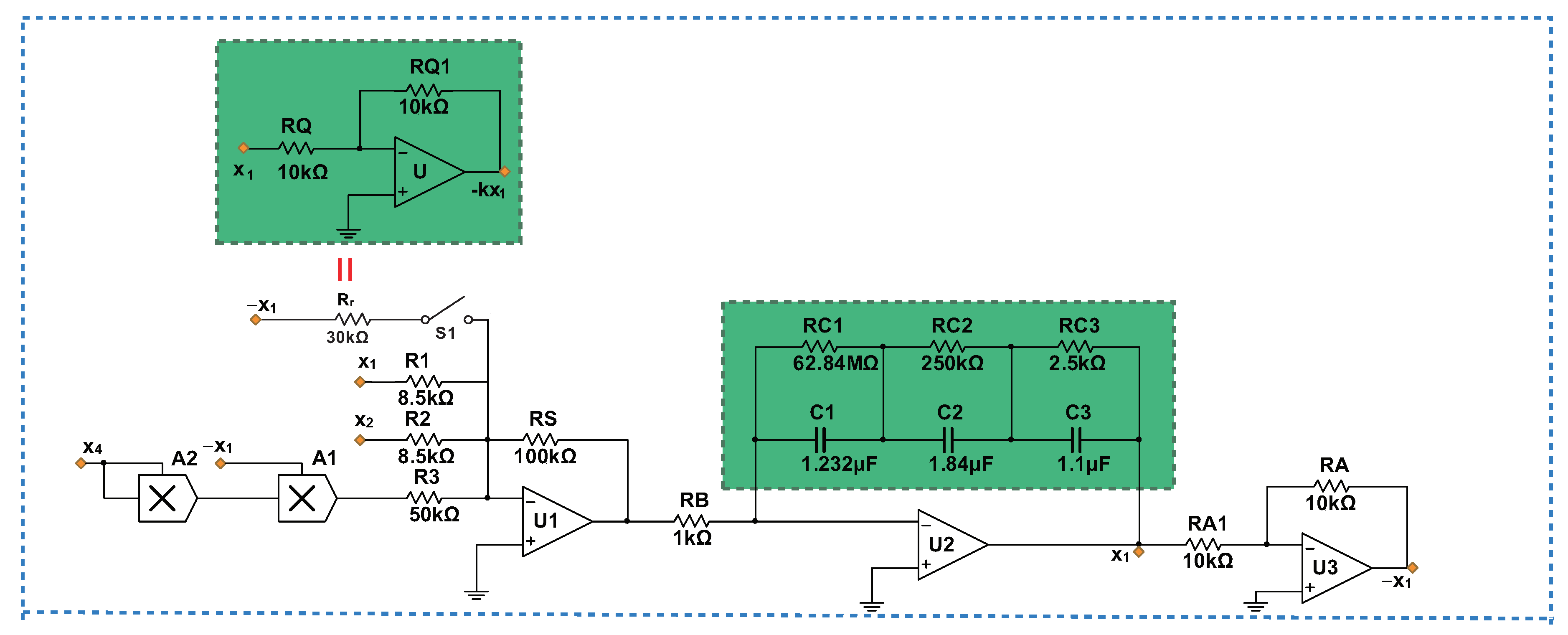
4.3. Fractional-Order Memristor Control Circuit
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Rössler, O.E. An equation for continuous chaos. Phys. Lett. 1976, 57, 397–398. [Google Scholar] [CrossRef]
- Chen, G.; Ueta, T. Yet another chaotic attractor. Int. J. Bifurc. Chaos 1999, 9, 1465–1466. [Google Scholar] [CrossRef]
- Lü, J.; Chen, G. A new chaotic attractor coined. Int. J. Bifurc. Chaos 2002, 12, 659–661. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Mou, J.; Xiong, L.; Banerjee, S.; Liu, T.; Han, X. Dynamical analysis of a new chaotic system: Asymmetric multistability, offset boosting control and circuit realization. Nonlinear Dyn. 2021, 103, 2867–2880. [Google Scholar] [CrossRef]
- Zhou, L.; You, Z.; Tang, Y. A new chaotic system with nested coexisting multiple attractors and riddled basins. Chaos Solitons Fractals 2021, 148, 111057. [Google Scholar] [CrossRef]
- Tian, H.; Wang, Z.; Zhang, P.; Chen, M.; Wang, Y. Dynamic analysis and robust control of a chaotic system with hidden attractor. Complexity 2021, 2021, 8865522. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, Z.; Sun, K.; He, S.; Wang, H.; Xu, Q.; Chen, M. Chaotic flows with special equilibria. Eur. Phys. J. Spec. Top. 2020, 229, 905–919. [Google Scholar] [CrossRef]
- Tian, H.; Wang, Z.; Zhang, H.; Cao, Z.; Zhang, P. Dynamical analysis and fixed-time synchronization of a chaotic system with hidden attractor and a line equilibrium. Eur. Phys. J. Spec. Top. 2022, 231, 2455–2466. [Google Scholar] [CrossRef]
- Li, C.; Rajagopal, K.; Nazarimehr, F.; Liu, Y. A non-autonomous chaotic system with no equilibrium. Integration 2021, 79, 143–156. [Google Scholar] [CrossRef]
- Zhang, R.; Xi, X.; Tian, H.; Wang, Z. Dynamical Analysis and Finite-Time Synchronization for a Chaotic System with Hidden Attractor and Surface Equilibrium. Axioms 2022, 11, 579. [Google Scholar] [CrossRef]
- Ye, G.; Pan, C.; Huang, X.; Mei, Q. An efficient pixel-level chaotic image encryption algorithm. Nonlinear Dyn. 2018, 94, 745–756. [Google Scholar] [CrossRef]
- Ahmad, I.; Ouannas, A.; Shafiq, M.; Pham, V.T.; Baleanu, D. Finite-time stabilization of a perturbed chaotic finance model. J. Adv. Res. 2021, 32, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Qin, C.; Sun, K.; He, S. Characteristic analysis of fractional-order memristor-based hypogenetic jerk system and its DSP implementation. Electronics 2021, 10, 841. [Google Scholar] [CrossRef]
- Chua, L. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Lai, Q.; Wan, Z.; Kuate, P.D.K.; Fotsin, H. Coexisting attractors, circuit implementation and synchronization control of a new chaotic system evolved from the simplest memristor chaotic circuit. Commun. Nonlinear Sci. Numer. Simul. 2020, 89, 105341. [Google Scholar] [CrossRef]
- Rajagopal, K.; Kacar, S.; Wei, Z.; Duraisamy, P.; Kifle, T.; Karthikeyan, A. Dynamical investigation and chaotic associated behaviors of memristor Chua’s circuit with a non-ideal voltage-controlled memristor and its application to voice encryption. Aeu-Int. J. Electron. Commun. 2019, 107, 183–191. [Google Scholar] [CrossRef]
- Xie, W.; Wang, C.; Lin, H. A fractional-order multistable locally active memristor and its chaotic system with transient transition, state jump. Nonlinear Dyn. 2021, 104, 4523–4541. [Google Scholar] [CrossRef]
- Qi, Y.; Wu, C.; Zhang, Q.; Yan, K.; Wang, H. Complex dynamics behavior analysis of a new chaotic system based on fractional-order memristor. J. Phys. Conf. Ser. 2021, 1861, 012114. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Chen, M.; Zhang, P.; Yang, R.; Yang, B. Chaotic system dynamics analysis and synchronization circuit realization of fractional-order memristor. Eur. Phys. J. Spec. Top. 2022, 231, 3095–3107. [Google Scholar] [CrossRef]
- Volos, C.K.; Pham, V.T.; Nistazakis, H.E.; Stouboulos, I.N. A dream that has come true: Chaos from a nonlinear circuit with a real memristor. Int. J. Bifurc. Chaos 2020, 30, 2030036. [Google Scholar] [CrossRef]
- Wang, Z.; Baruni, S.; Parastesh, F.; Jafari, S.; Ghosh, D.; Perc, M.; Hussain, I. Chimeras in an adaptive neuronal network with burst-timing-dependent plasticity. Neurocomputing 2020, 406, 117–126. [Google Scholar] [CrossRef]
- Wang, Z.; Parastesh, F.; Rajagopal, K.; Hamarash, I.I.; Hussain, I. Delay-induced synchronization in two coupled chaotic memristive Hopfield neural networks. Chaos Solitons Fractals 2020, 134, 109702. [Google Scholar] [CrossRef]
- Liang, H.; Wang, Z.; Yue, Z.; Lu, R. Generalized synchronization and control for incommensurate fractional unified chaotic system and applications in secure communication. Kybernetika 2012, 48, 190–205. [Google Scholar]
- Gu, S.; Peng, Q.; Leng, X.; Du, B. A novel non-equilibrium memristor-based system with multi-wing attractors and multiple transient transitions. Chaos Interdiscip. Nonlinear Sci. 2021, 31, 033105. [Google Scholar] [CrossRef]
- Liao, H.; Ding, Y.; Wang, L. Adomian decomposition algorithm for studying incommensurate fractional-order memristor-based Chua’s system. Int. J. Bifurc. Chaos 2018, 28, 1850134. [Google Scholar] [CrossRef]
- Mou, J.; Sun, K.; Wang, H.; Ruan, J. Characteristic analysis of fractional-order 4D hyperchaotic memristive circuit. Math. Probl. Eng. 2017, 2017, 2313768. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Wang, G.; Iu, H.H.C.; Shen, Y.; Zhou, W. A nonvolatile fractional order memristor model and its complex dynamics. Entropy 2019, 21, 955. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Bao, H.; Shi, M.; Bao, B.; Chen, Y.; Chen, M. Complex dynamical behaviors of a fractional-order system based on a locally active memristor. Complexity 2019, 2019, 2051053. [Google Scholar] [CrossRef]
- Chen, C.; Chen, J.; Bao, H.; Chen, M.; Bao, B. Coexisting multi-stable patterns in memristor synapse-coupled Hopfield neural network with two neurons. Nonlinear Dyn. 2019, 95, 3385–3399. [Google Scholar] [CrossRef]
- Bao, H.; Wang, N.; Bao, B.; Chen, M.; Jin, P.; Wang, G. Initial condition-dependent dynamics and transient period in memristor-based hypogenetic jerk system with four line equilibria. Commun. Nonlinear Sci. Numer. Simul. 2018, 57, 264–275. [Google Scholar] [CrossRef]
- Sahin, M.; Taskiran, Z.C.; Guler, H.; Hamamci, S. Simulation and implementation of memristive chaotic system and its application for communication systems. Sens. Actuators A Phys. 2019, 290, 107–118. [Google Scholar] [CrossRef]
- Wang, S. Dynamical analysis of memristive unified chaotic system and its application in secure communication. IEEE Access 2018, 6, 66055–66061. [Google Scholar] [CrossRef]
- Haliuk, S.; Krulikovskyi, O.; Vovchuk, D.; Corinto, F. Memristive structure-based chaotic system for prng. Symmetry 2022, 14, 68. [Google Scholar] [CrossRef]
- Han, S.M.; Takasawa, T.; Yasutomi, K.; Aoyama, S.; Kagawa, K.; Kawahito, S. A time-of-flight range image sensor with background canceling lock-in pixels based on lateral electric field charge modulation. IEEE J. Electron Devices Soc. 2014, 3, 267–275. [Google Scholar] [CrossRef]
- Sebastian, A.; Le Gallo, M.; Khaddam-Aljameh, R.; Eleftheriou, E. Memory devices and applications for in-memory computing. Nat. Nanotechnol. 2020, 15, 529–544. [Google Scholar] [CrossRef]
- Khanzadeh, A.; Mohammadzaman, I. Comment on “Fractional-order fixed-time nonsingular terminal sliding mode synchronization and control of fractional-order chaotic systems”. Nonlinear Dyn. 2018, 94, 3145–3153. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional-order systems and PI/sup/spl lambda//D/sup/spl mu//-controllers. IEEE Trans. Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Matignon, D. Stability properties for generalized fractional differential systems. In ESAIM: Proceedings; EDP Sciences: Paris, France, 1998; Volume 5, pp. 145–158. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Circuit Element | Physical Meaning of Parameters | Parameter Value |
|---|---|---|
| resistance | 10k | |
| resistance | 62 k | |
| resistance | 100 k | |
| resistance | 125 k | |
| capacitance | 1 nF |
| q | Dynamical Properties | Phase Diagrams |
|---|---|---|
| (0.700,0.748) | periodic-1 | Figure 6a |
| (0.748,0.754) | periodic-2 | Figure 6b |
| (0.754,0.780) | periodic-4 | Figure 6c |
| (0.780,0.850) | chaotic | Figure 6d |
| (0.850,0.910) | chaotic | Figure 6e |
| (0.910,1.000) | periodic-2 | Figure 6f |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, H.; Liu, J.; Wang, Z.; Xie, F.; Cao, Z. Characteristic Analysis and Circuit Implementation of a Novel Fractional-Order Memristor-Based Clamping Voltage Drift. Fractal Fract. 2023, 7, 2. https://doi.org/10.3390/fractalfract7010002
Tian H, Liu J, Wang Z, Xie F, Cao Z. Characteristic Analysis and Circuit Implementation of a Novel Fractional-Order Memristor-Based Clamping Voltage Drift. Fractal and Fractional. 2023; 7(1):2. https://doi.org/10.3390/fractalfract7010002
Chicago/Turabian StyleTian, Huaigu, Jindong Liu, Zhen Wang, Fei Xie, and Zelin Cao. 2023. "Characteristic Analysis and Circuit Implementation of a Novel Fractional-Order Memristor-Based Clamping Voltage Drift" Fractal and Fractional 7, no. 1: 2. https://doi.org/10.3390/fractalfract7010002
APA StyleTian, H., Liu, J., Wang, Z., Xie, F., & Cao, Z. (2023). Characteristic Analysis and Circuit Implementation of a Novel Fractional-Order Memristor-Based Clamping Voltage Drift. Fractal and Fractional, 7(1), 2. https://doi.org/10.3390/fractalfract7010002