Figure 1.
Graphics of numerical solution obtained via QLM-SAPSK approach (left) and related REFs (right) using , , and with integer-orders .
Figure 1.
Graphics of numerical solution obtained via QLM-SAPSK approach (left) and related REFs (right) using , , and with integer-orders .
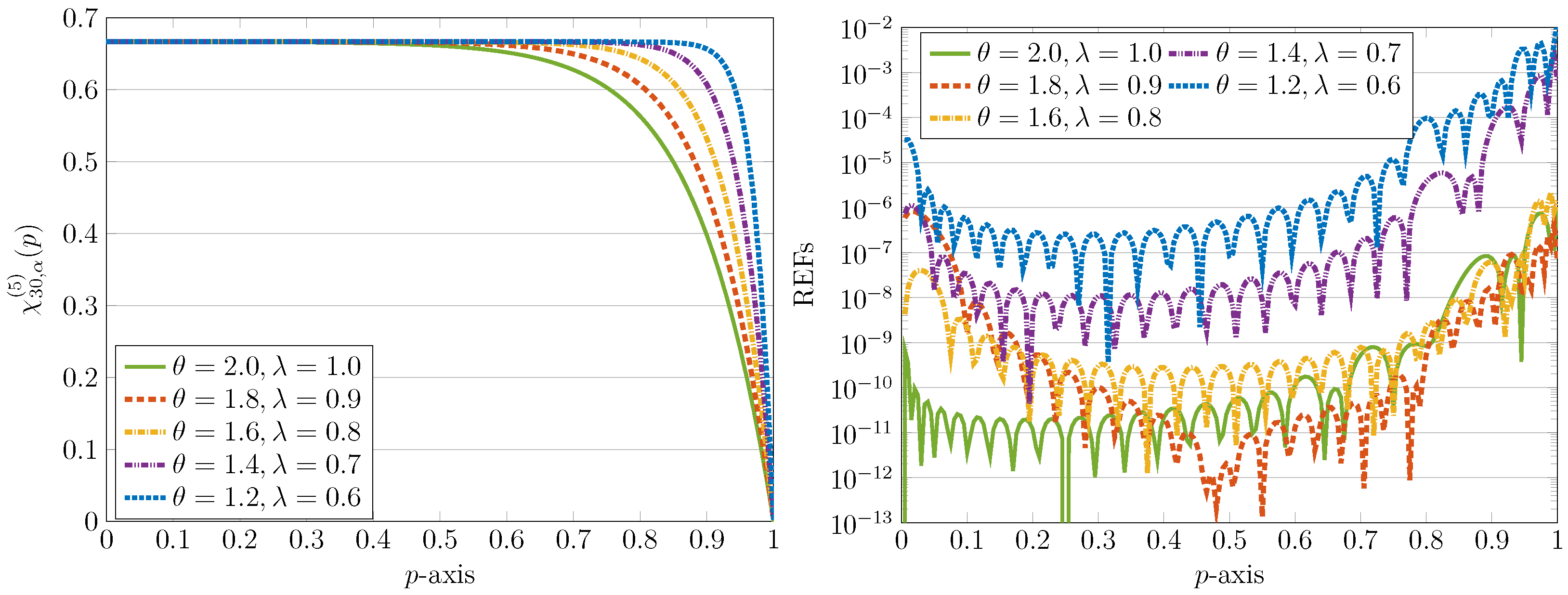
Figure 2.
Graphics of numerical solution obtained via QLM-SAPSK approach with (left) and (right) using , various , and with integer-orders .
Figure 2.
Graphics of numerical solution obtained via QLM-SAPSK approach with (left) and (right) using , various , and with integer-orders .
Figure 3.
Graphics of numerical solution obtained via the QLM-SAPSK approach with (left) and the associated REFs (right) using , various , and with integer-orders .
Figure 3.
Graphics of numerical solution obtained via the QLM-SAPSK approach with (left) and the associated REFs (right) using , various , and with integer-orders .
Figure 4.
Graphics of numerical solution obtained via QLM-SAPSK approach with (left) and (right) using , various , and with integer-orders .
Figure 4.
Graphics of numerical solution obtained via QLM-SAPSK approach with (left) and (right) using , various , and with integer-orders .
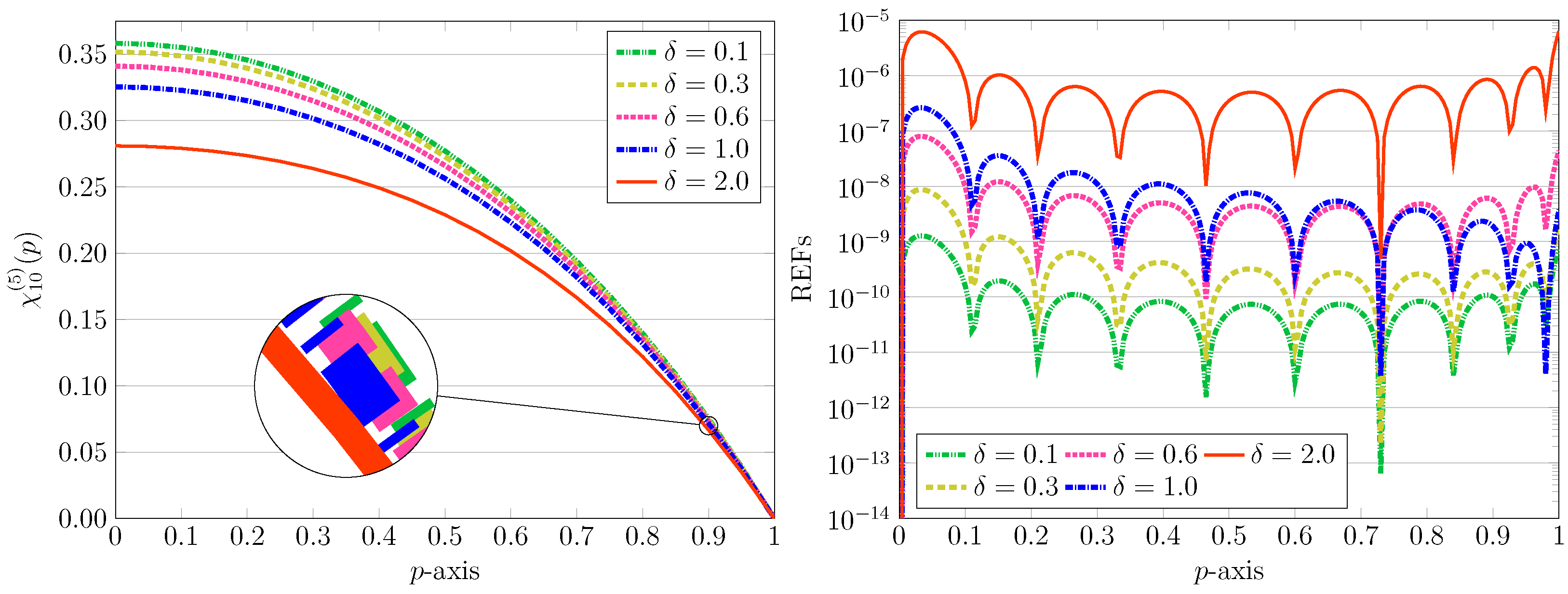
Figure 5.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , and with fractional-orders .
Figure 5.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , and with fractional-orders .
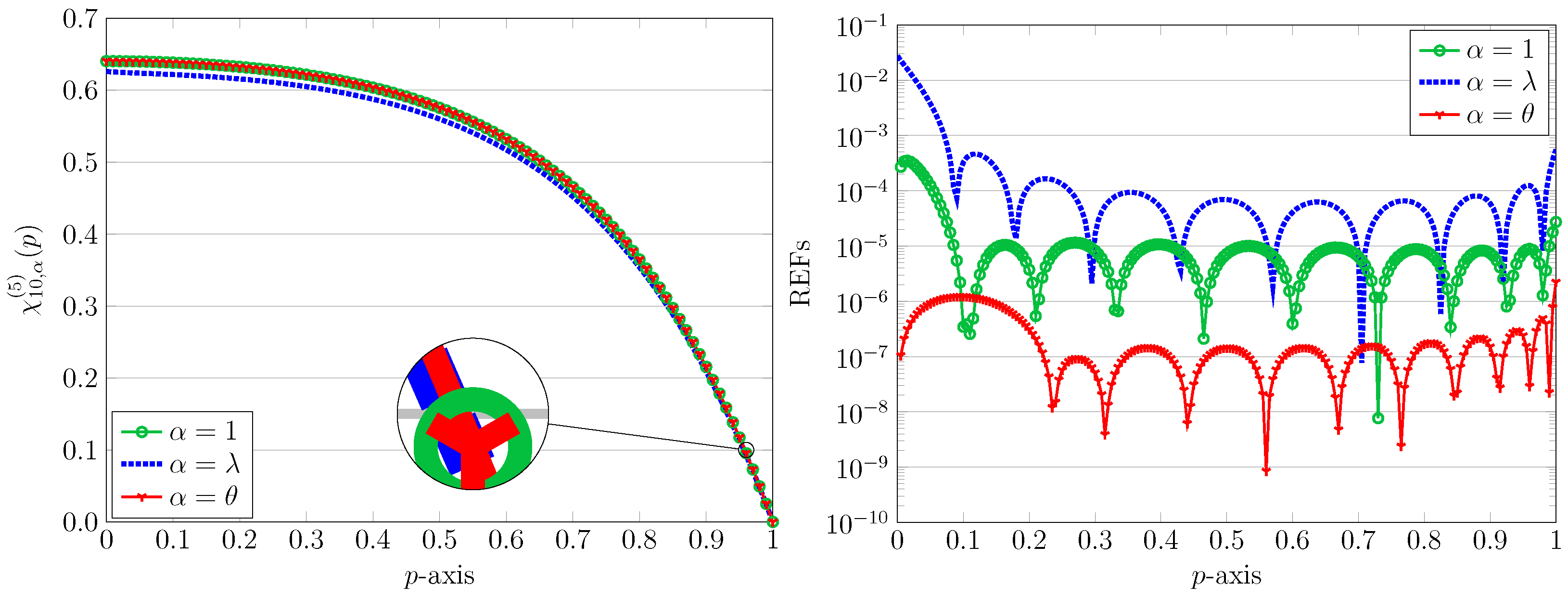
Figure 6.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , and with fractional-orders .
Figure 6.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , and with fractional-orders .
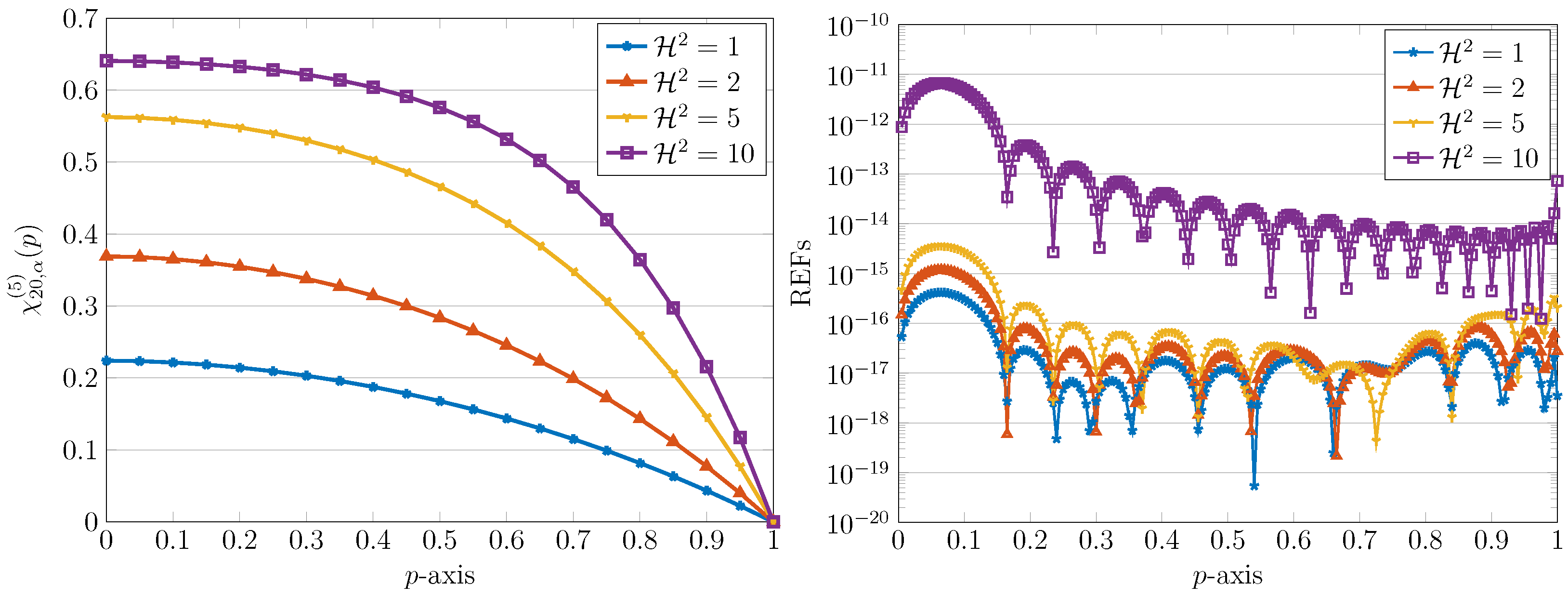
Figure 7.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , and with fractional-orders .
Figure 7.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , and with fractional-orders .
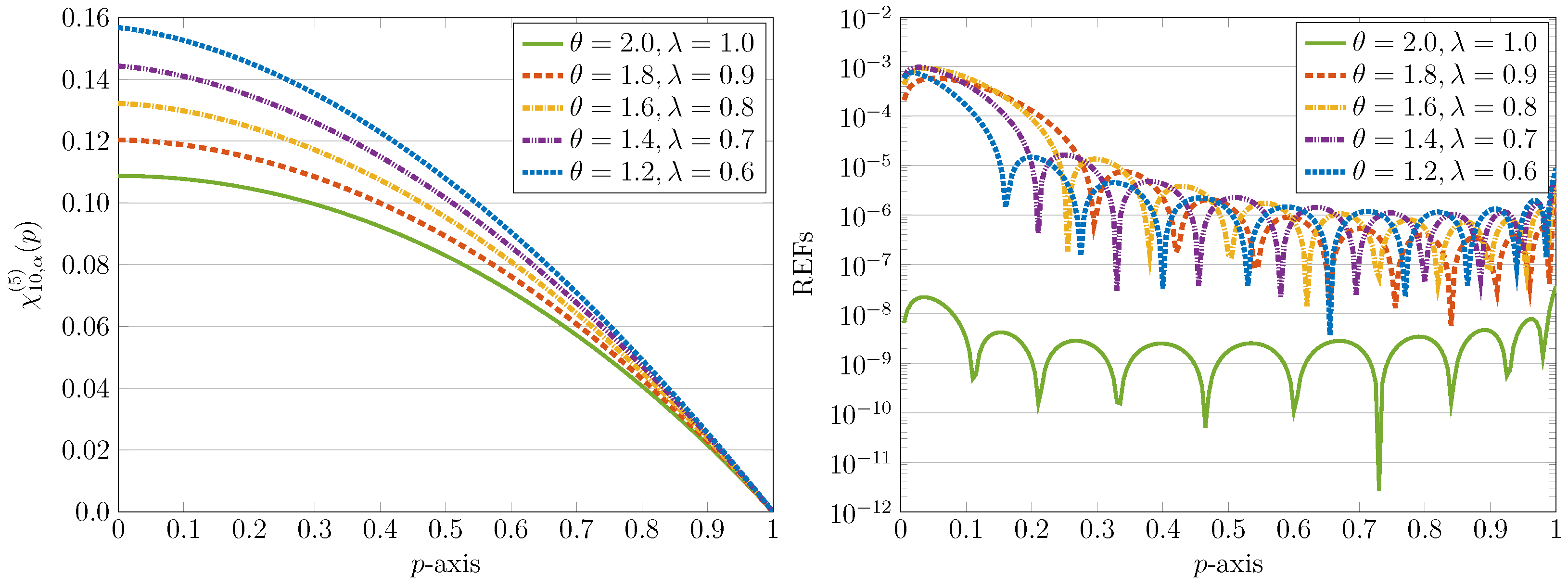
Figure 8.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , , and various fractional-orders .
Figure 8.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , , and various fractional-orders .
Figure 9.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , , and various fractional-orders .
Figure 9.
Graphics of numerical solutions obtained via the QLM-GSAPSK technique (left) and related REFs (right) with , , , , and various fractional-orders .
Table 1.
A comparison of numerical outcomes/REFs in QLM-SAPSK with , , , and various .
Table 1.
A comparison of numerical outcomes/REFs in QLM-SAPSK with , , , and various .
| | QLM-SAPSK | LSM [11] | GM [4] | LSCM [4] |
|---|
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
Table 2.
The outcomes of error norms, the related , and the spent CPU time with , , and different R.
Table 2.
The outcomes of error norms, the related , and the spent CPU time with , , and different R.
| | QLM-SAPSK | | CBS [16] |
|---|
| R | | | CPU(s) | n | MAE | ROC | CPU(s) |
|---|
| 2 | | − | | 16 | | − | |
| 4 | | | | 32 | | | |
| 8 | | | | 64 | | | |
| 16 | | | | 128 | | | |
Table 3.
A comparison of error norms utilizing , , , and different .
Table 3.
A comparison of error norms utilizing , , , and different .
| | QLM-SAPSK | Jacobi [24] | Legendre [24] | Chebyshev [24] | HW [18] | DADS [14] |
|---|
| | | | | | |
| | | | | − | |
| | | | | | |
| | | | | | |
| | | | | | |
Table 4.
A comparison of numerical outcomes/REFs in QLM-GSAPSK with , , , , and various .
Table 4.
A comparison of numerical outcomes/REFs in QLM-GSAPSK with , , , , and various .
| | QLM-SAPSK | | |
|---|
| p | | REFs | | REFs | RKHSM [1] | RKHSM [23] |
|---|
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
Table 5.
A comparison of numerical outcomes/REFs in QLM-GSAPSK with , , , , and various .
Table 5.
A comparison of numerical outcomes/REFs in QLM-GSAPSK with , , , , and various .
| p | | | | |
|---|
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
Table 6.
The outcomes of error norms and the related with , , , and different R.
Table 6.
The outcomes of error norms and the related with , , , and different R.
| | | | | |
|---|
| | | | | | | | |
| 2 | | − | | − | | − | | − |
| 4 | | | | | | | | |
| 8 | | | | | | | | |
| 16 | | | | | | | | |
Table 7.
The outcomes of error norms and the related with , , , and different R.
Table 7.
The outcomes of error norms and the related with , , , and different R.
| | | | | |
|---|
| | | | | | | | |
| 2 | | − | | − | | − | | − |
| 4 | | | | | | | | |
| 8 | | | | | | | | |
| 16 | | | | | | | | |















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}