

Optimal FOPI Error Voltage Control Dead-Time Compensation for PMSM Servo System



Abstract
:1. Introduction
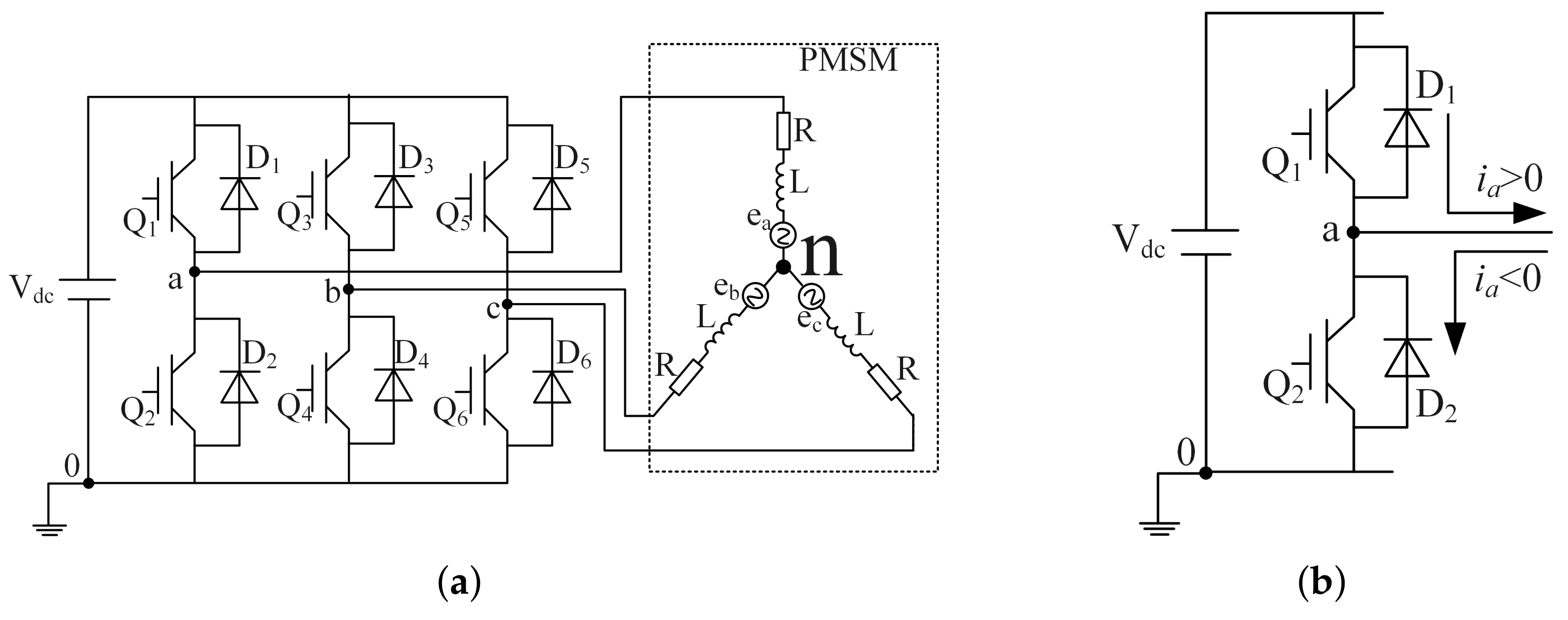
2. Analysis of Dead-Time Effect
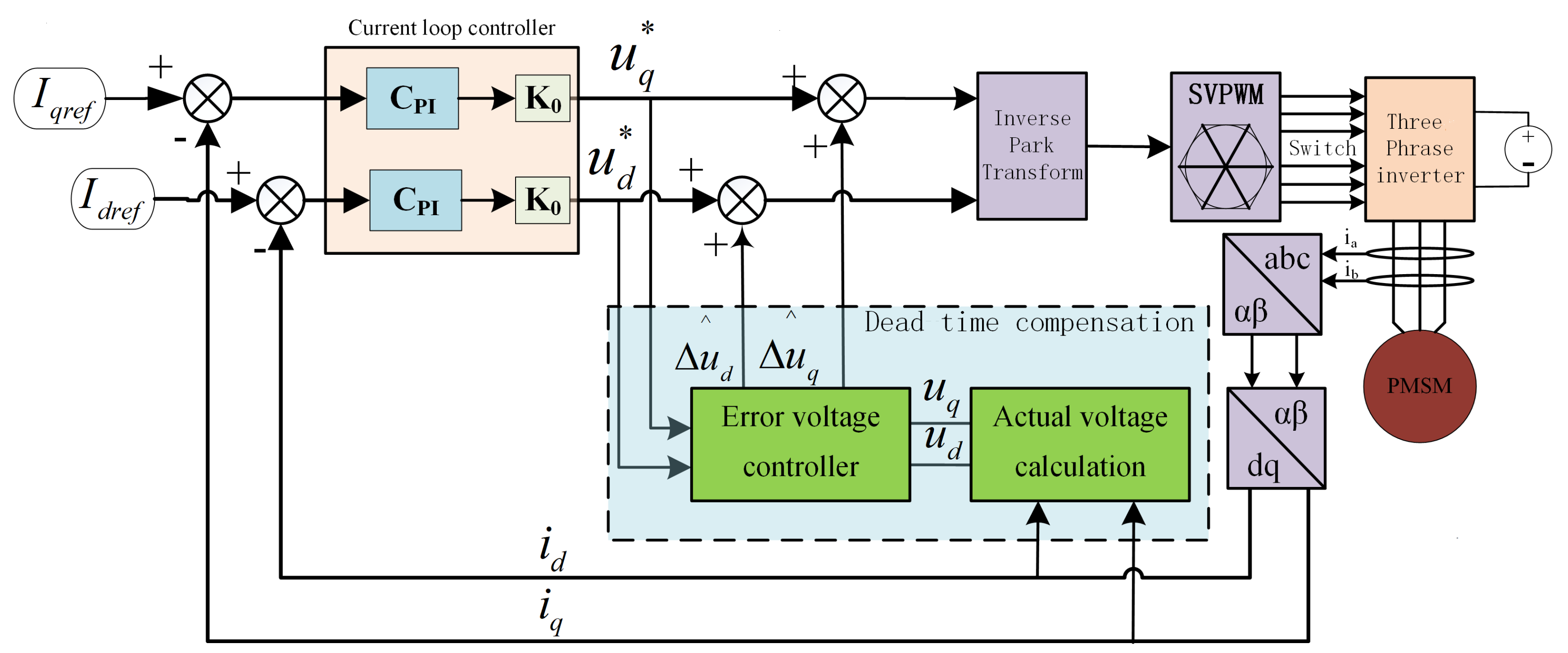
3. Proposed Dead-Time Compensation Strategy
3.1. Error Voltage Calculation Based on PMSM Model
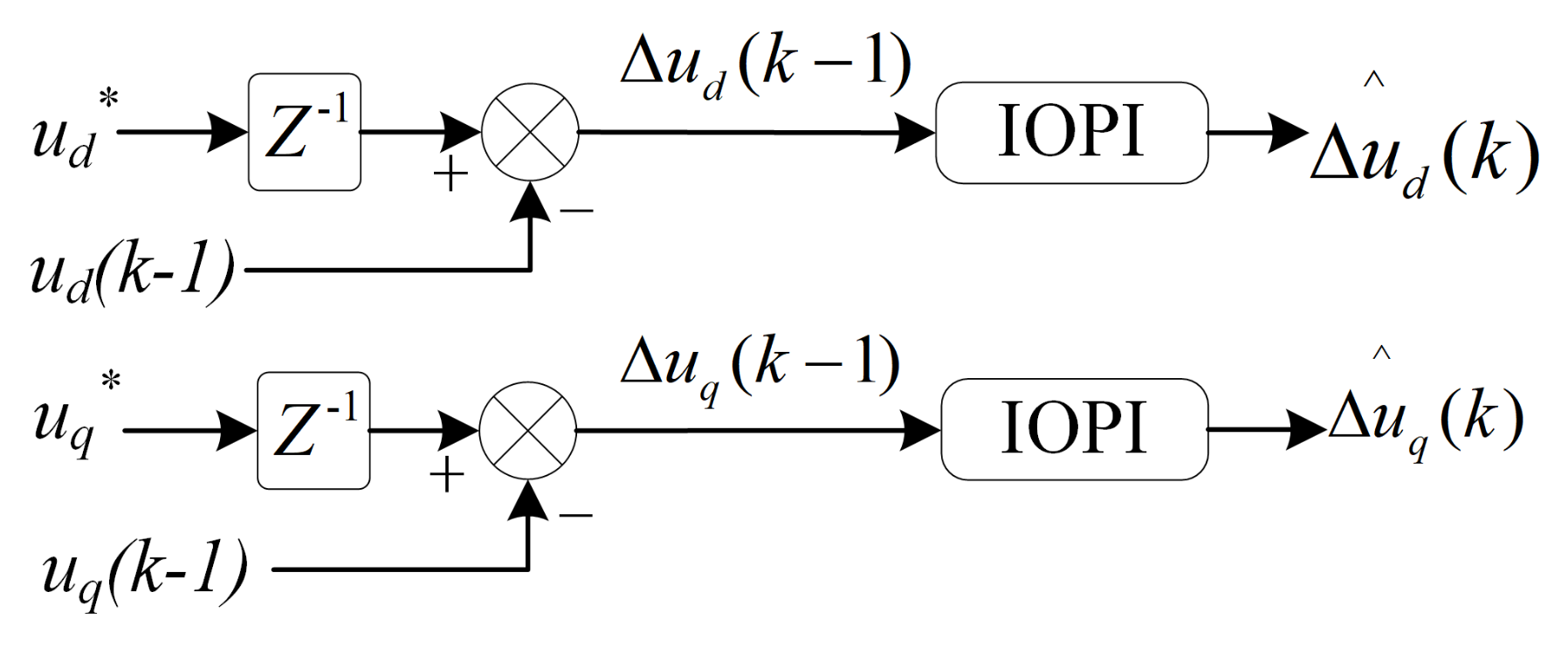
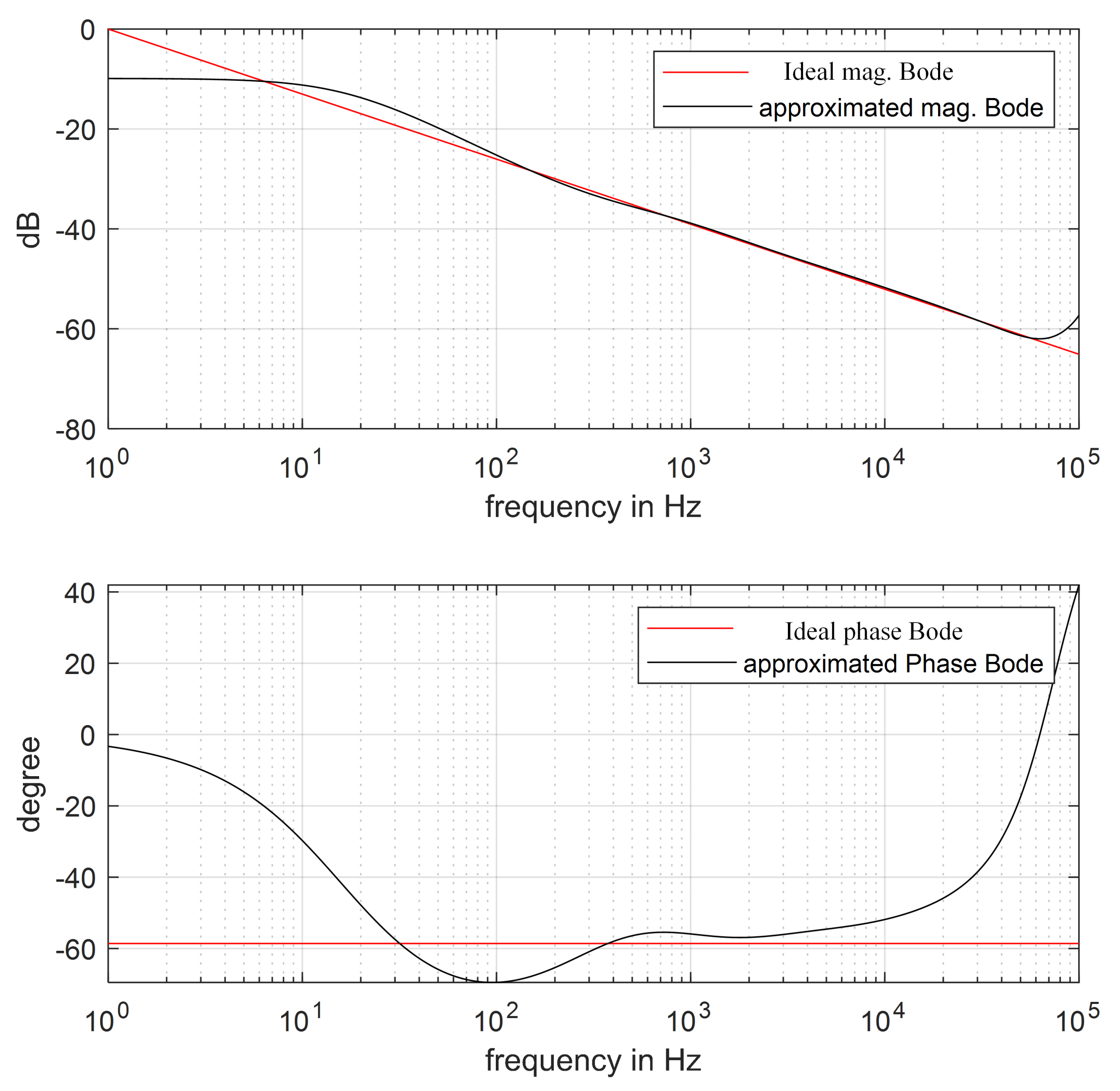
3.2. Compensation Method with Optimal FOPI Error Voltage Control
3.3. Compensation Method with Optimal IOPI Error Voltage Control
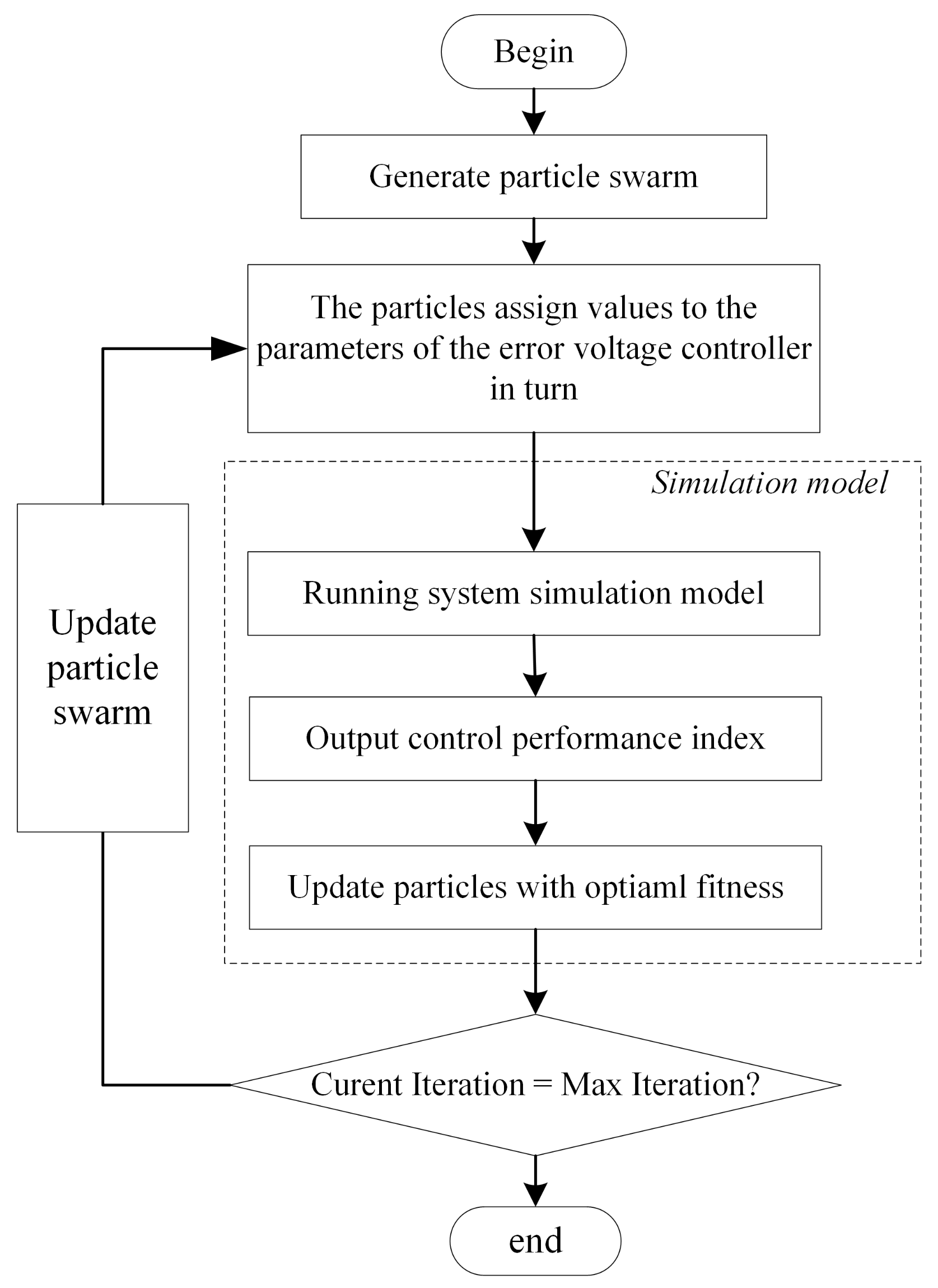
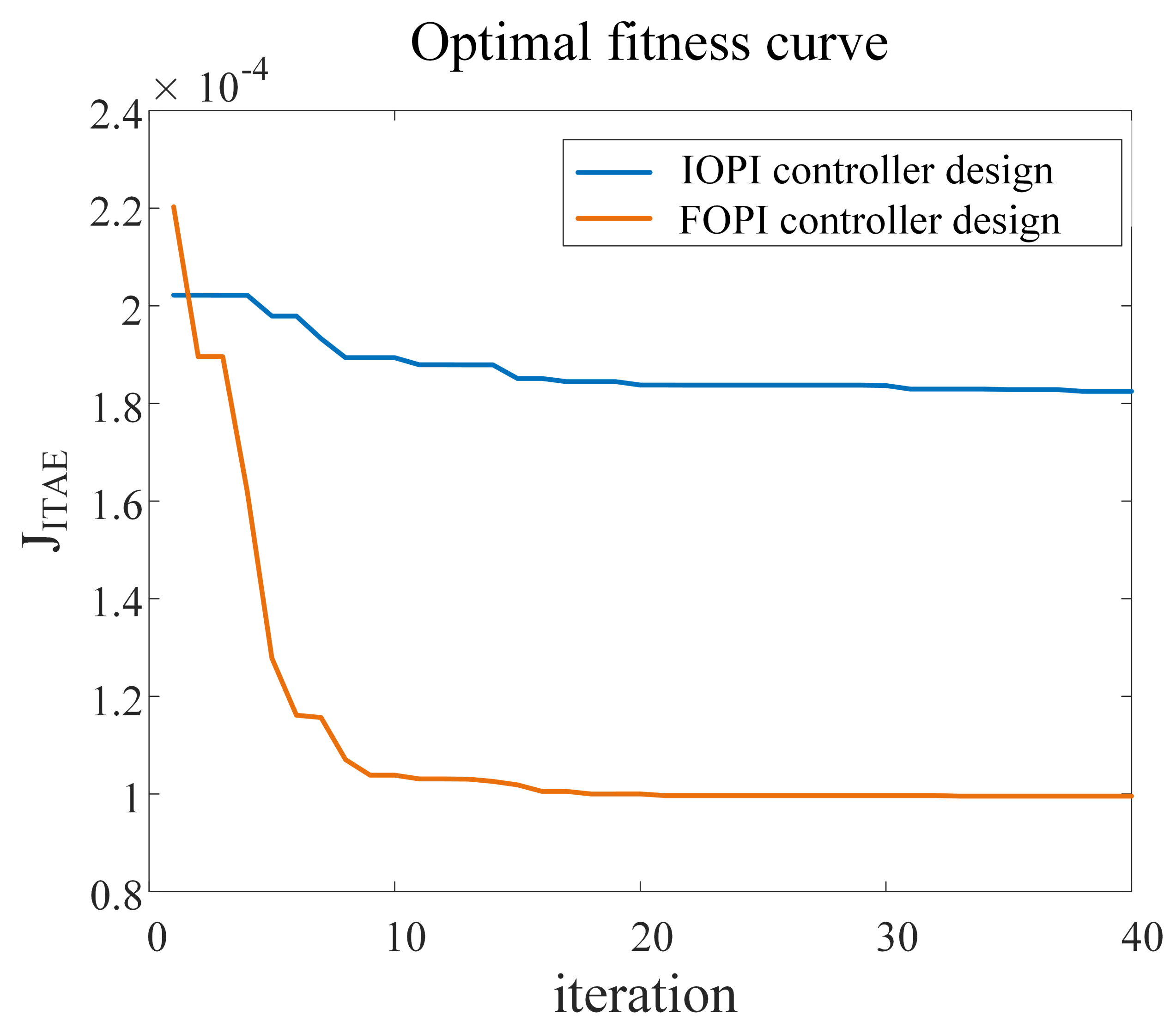
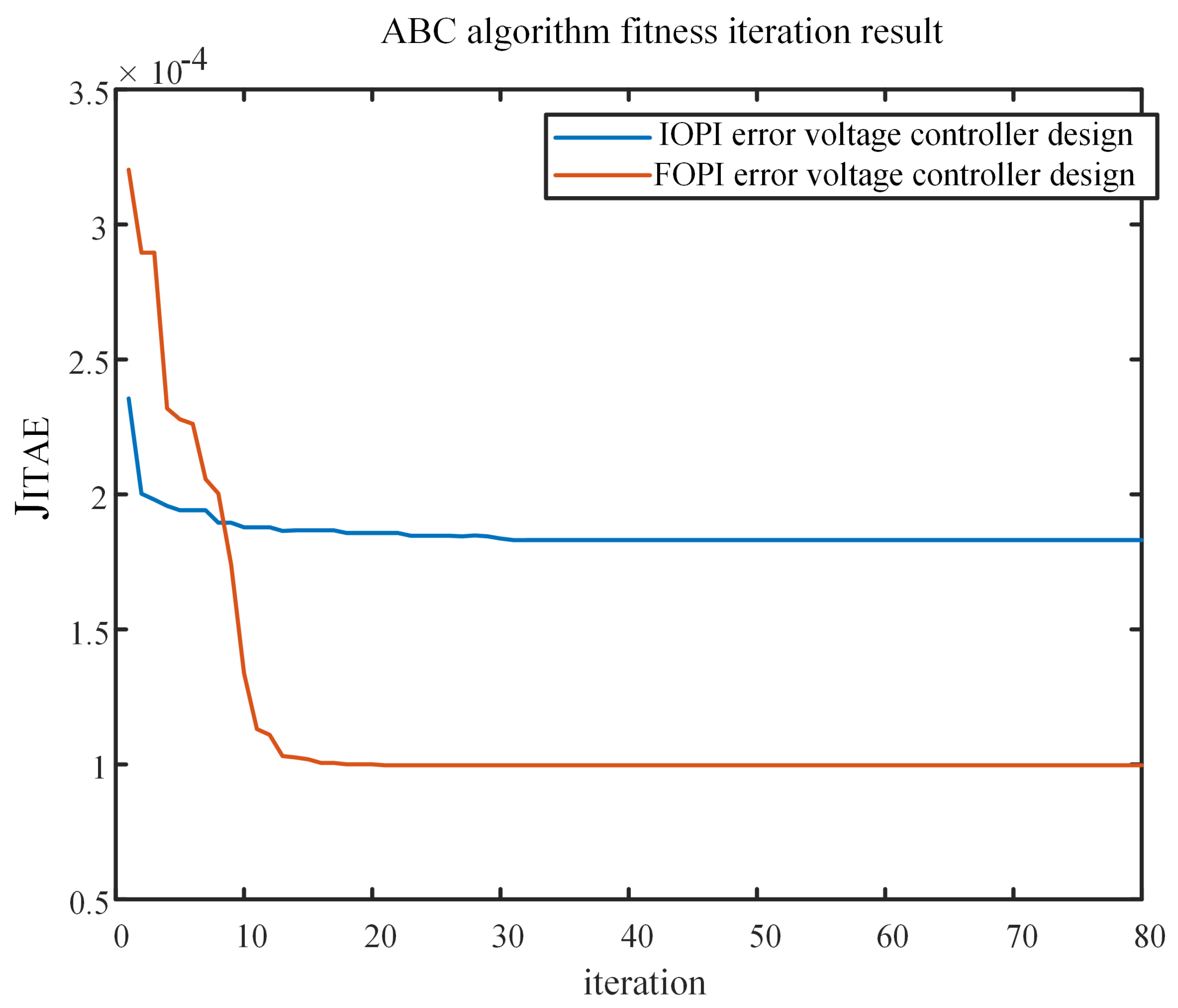
3.4. Parameter Design of Error Voltage Controller Based on Improved PSO Algorithm
3.5. Parameters Design of Current Loop Controller and Speed Loop Controller
4. Simulation Results
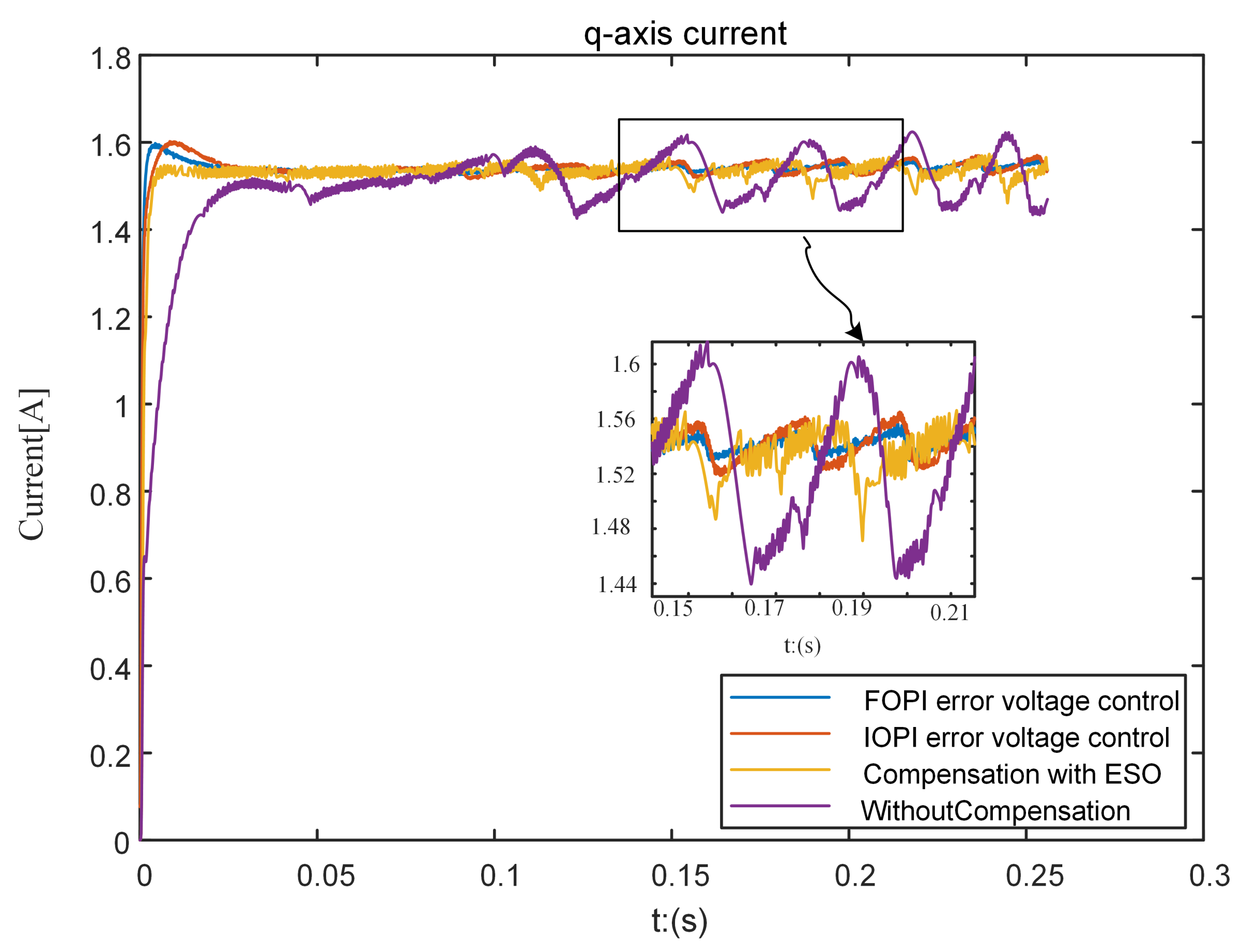
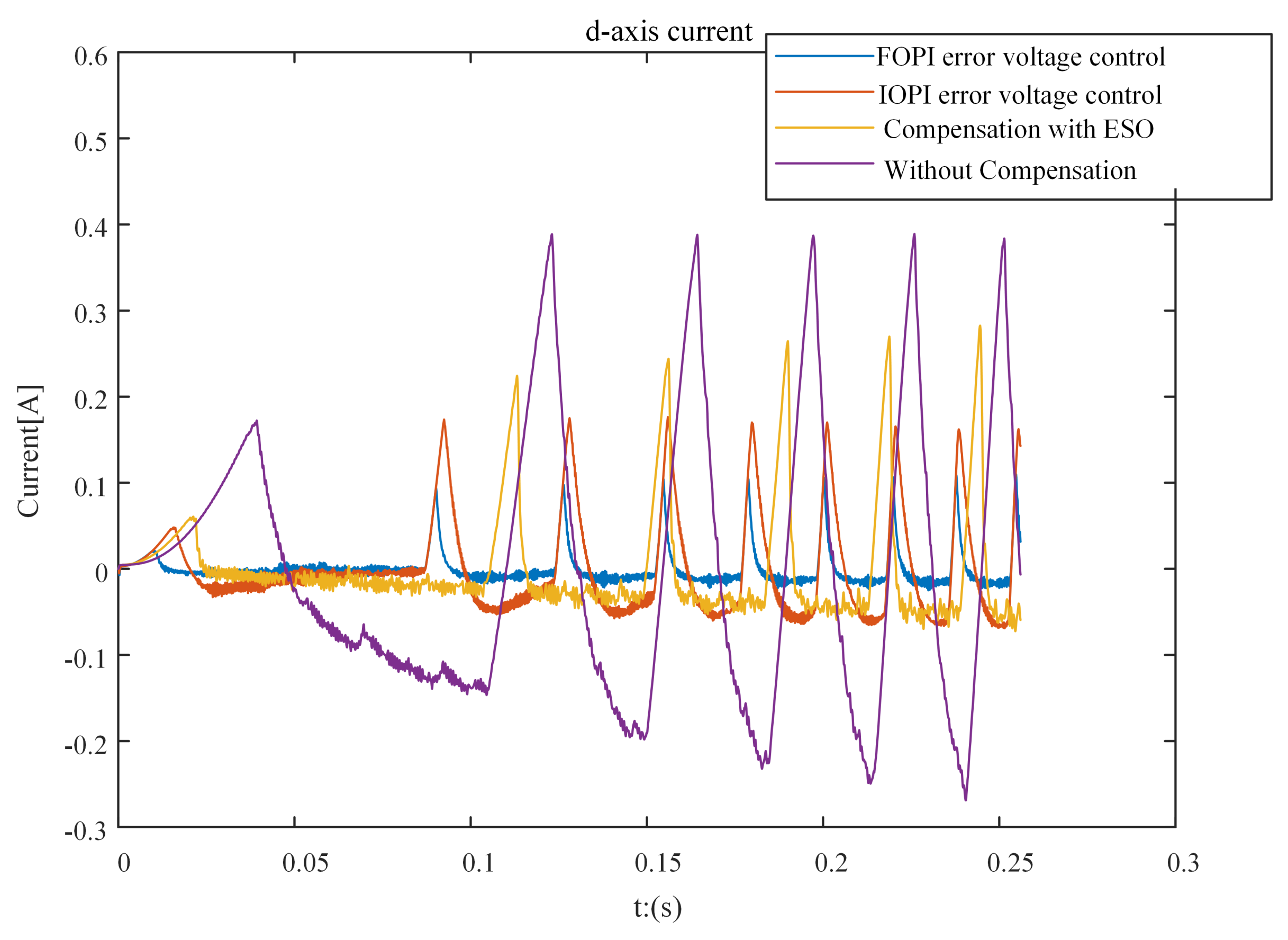
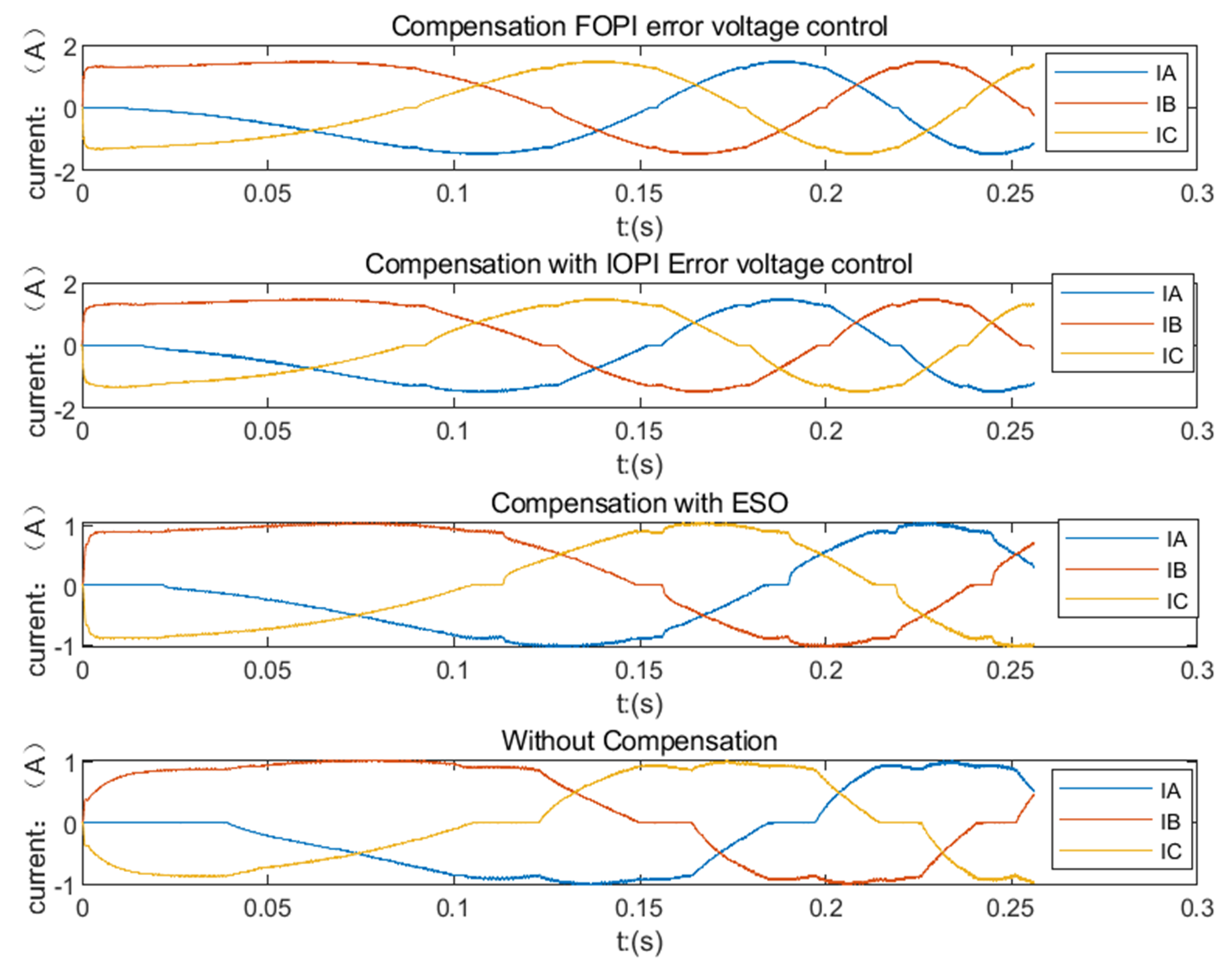
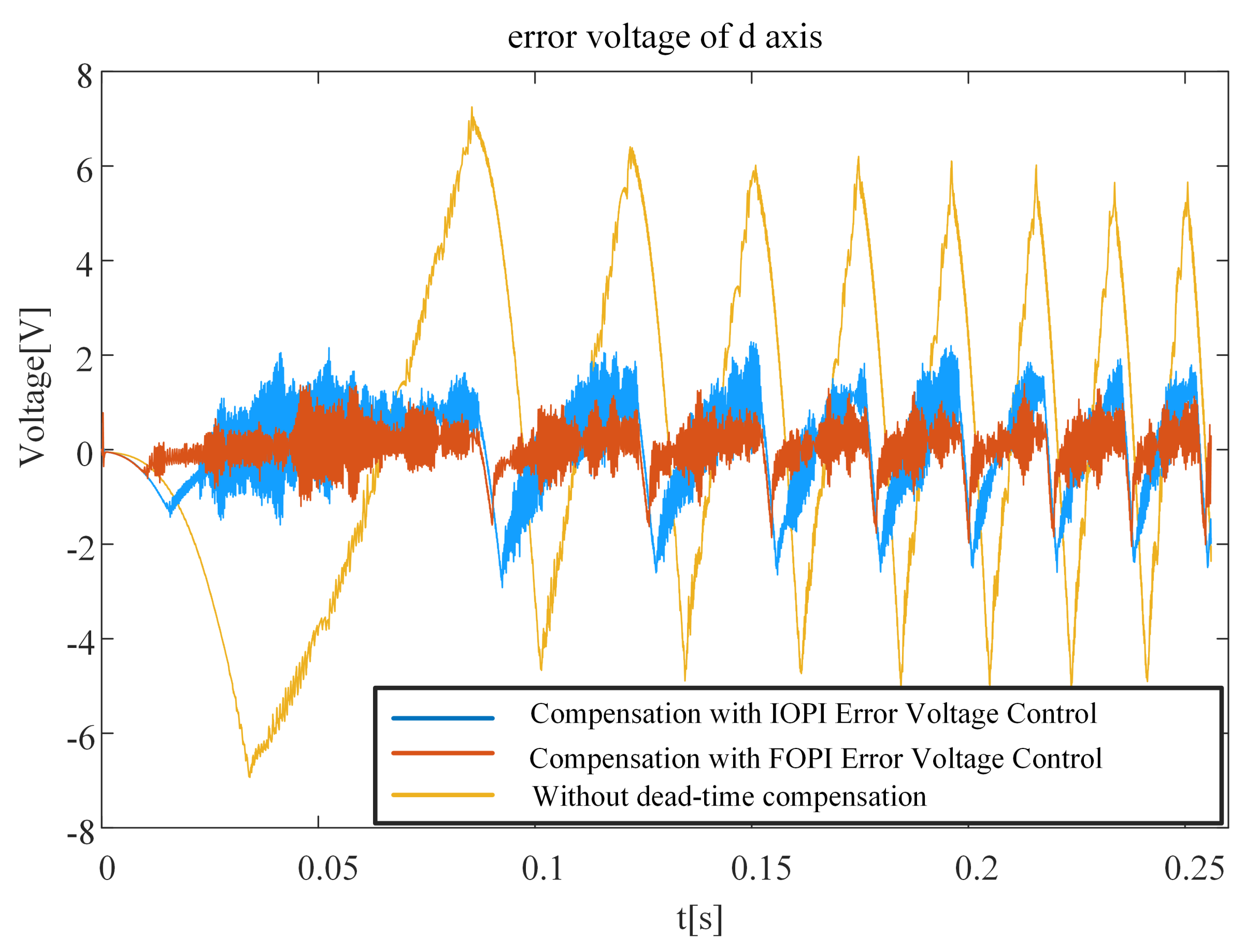
4.1. Current Closed-Loop Simulation
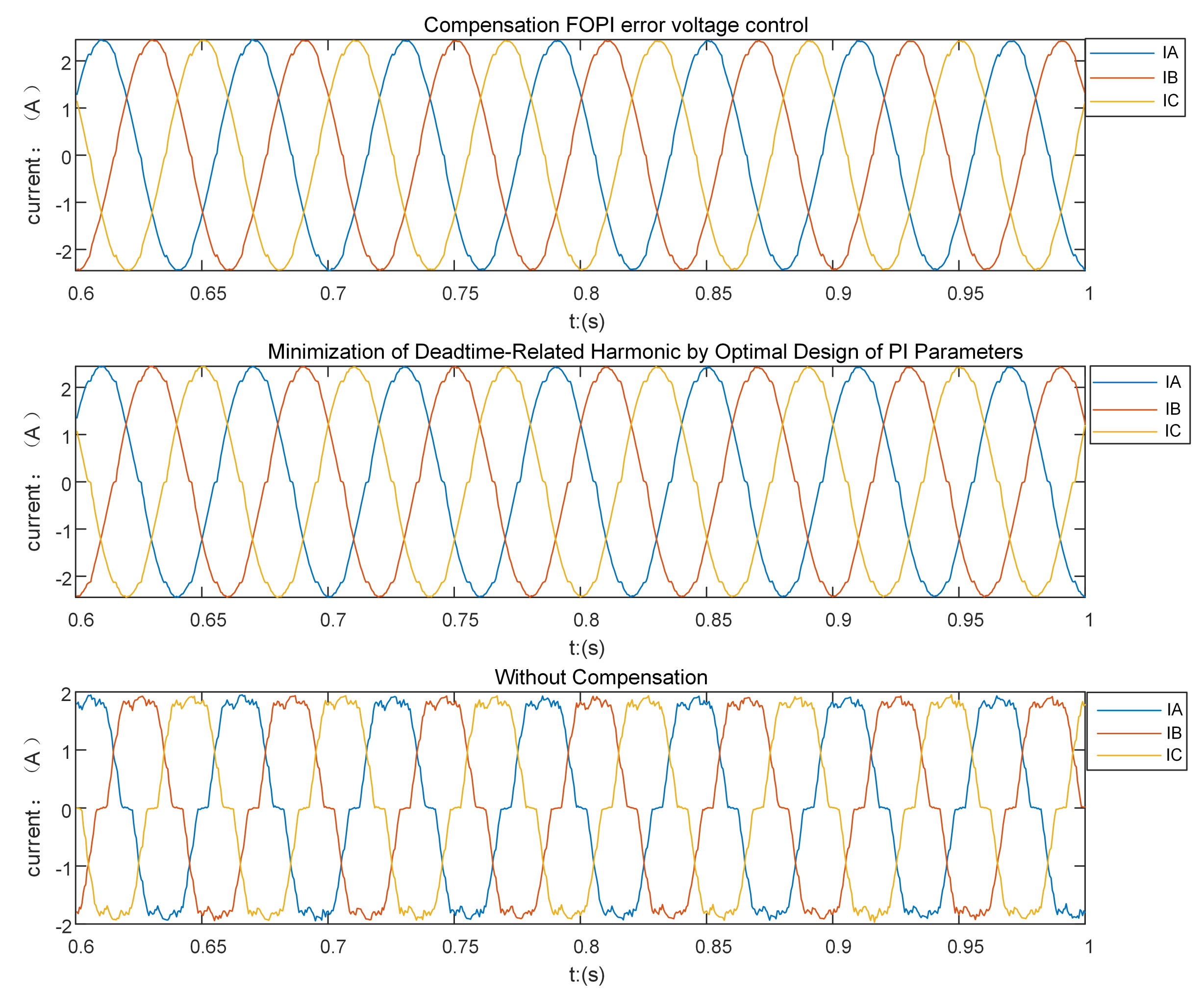
4.2. Speed Closed-Loop Simulation
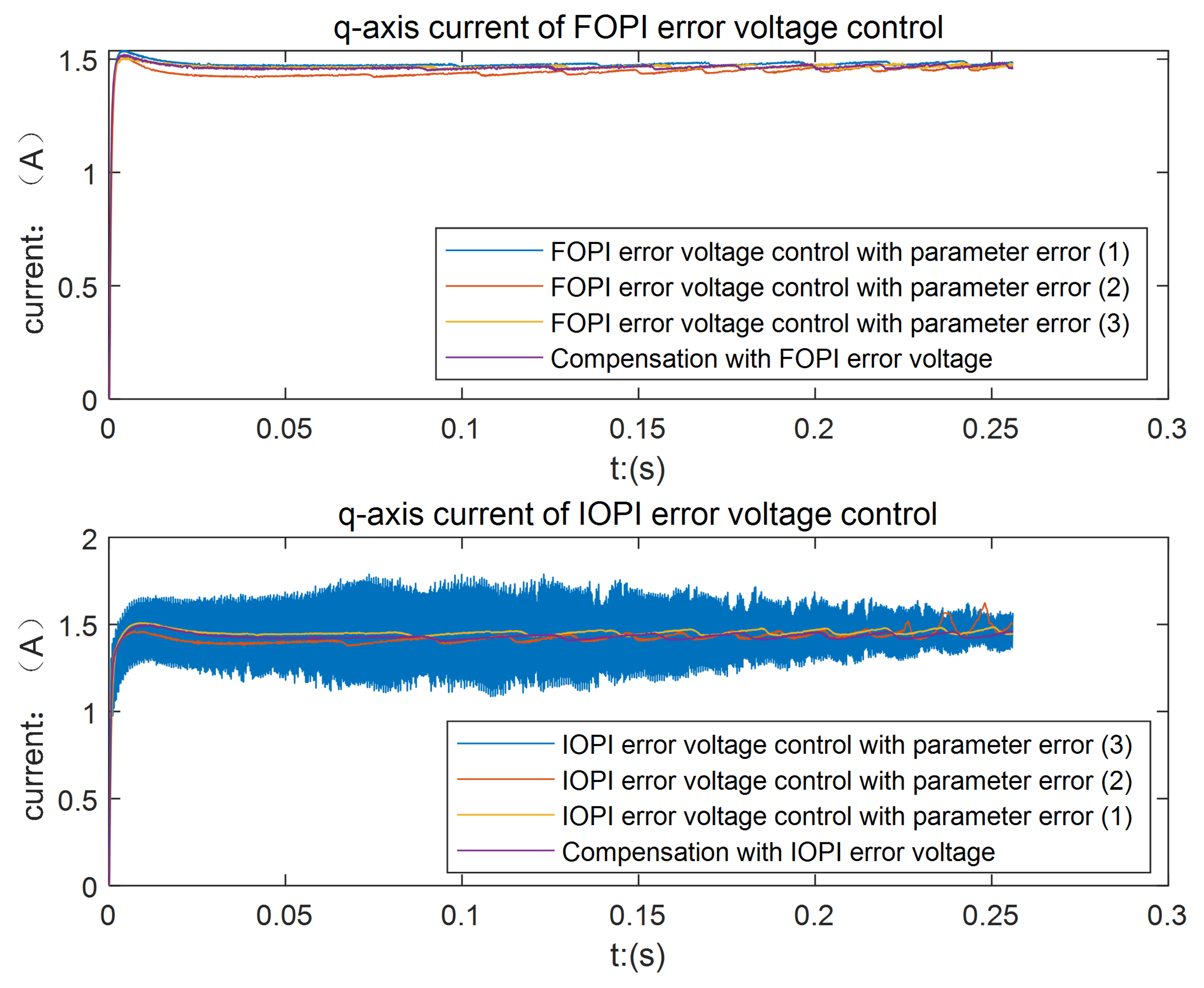
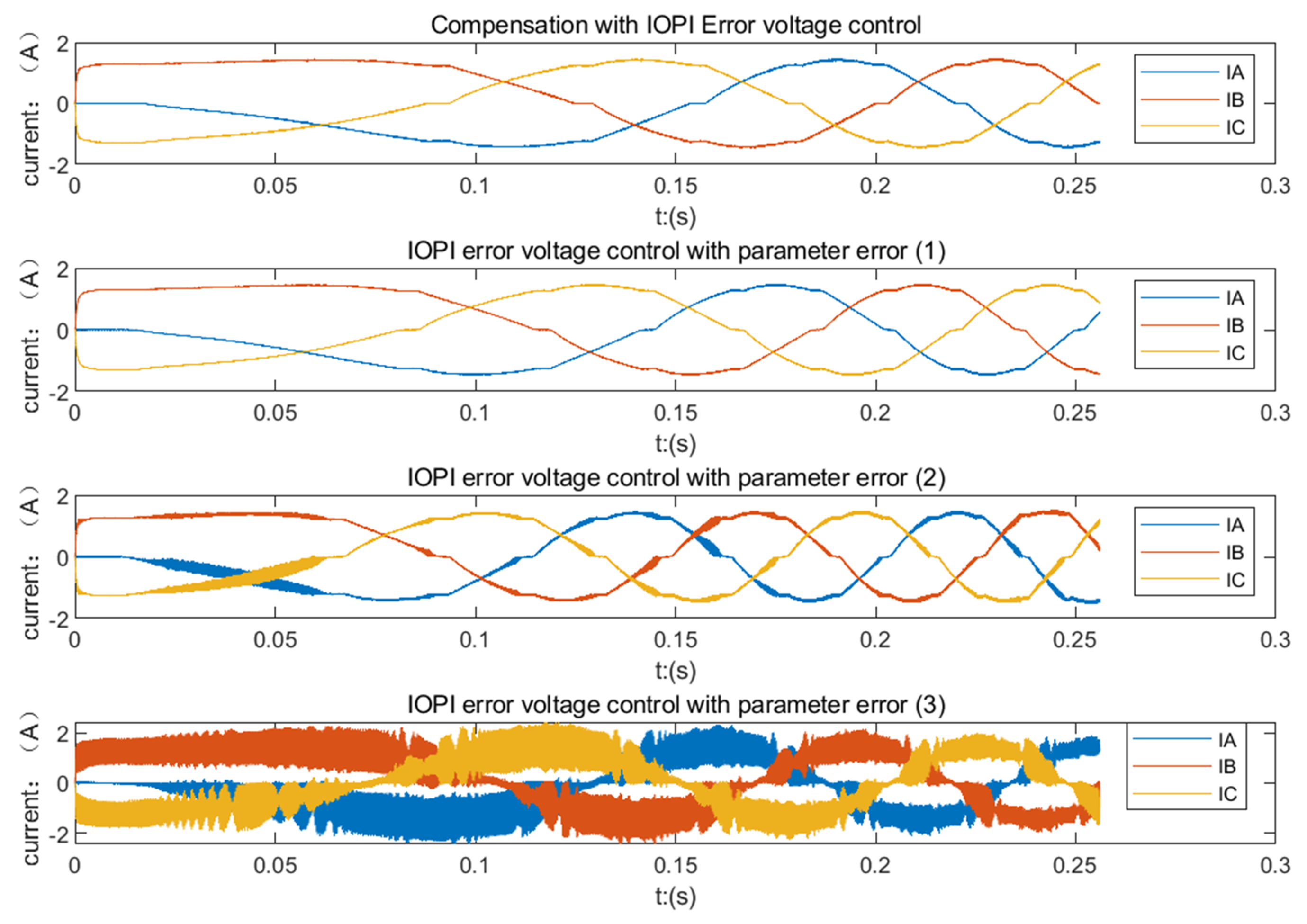
4.3. Robustness Comparison for Motor Parameter Error
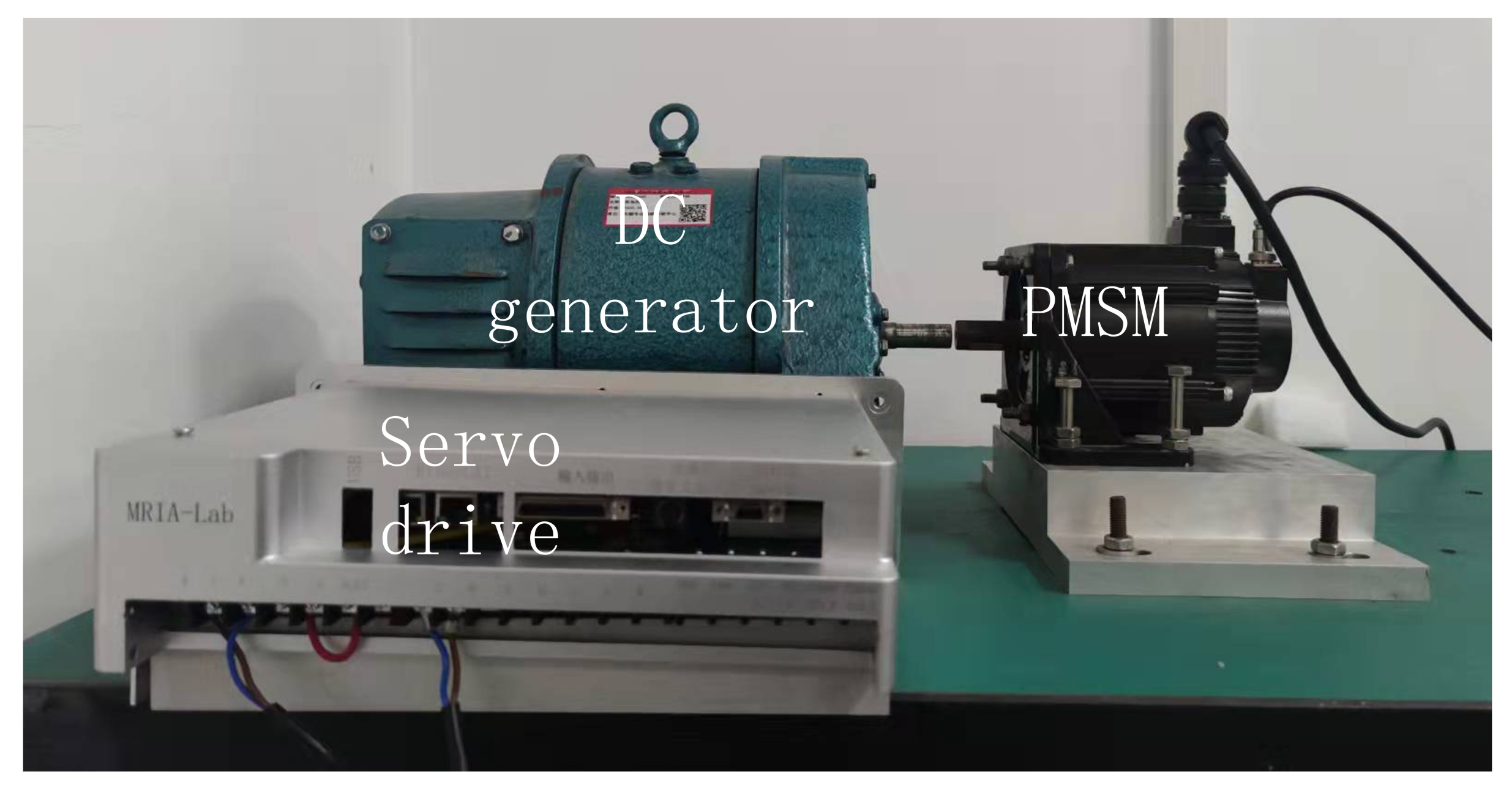
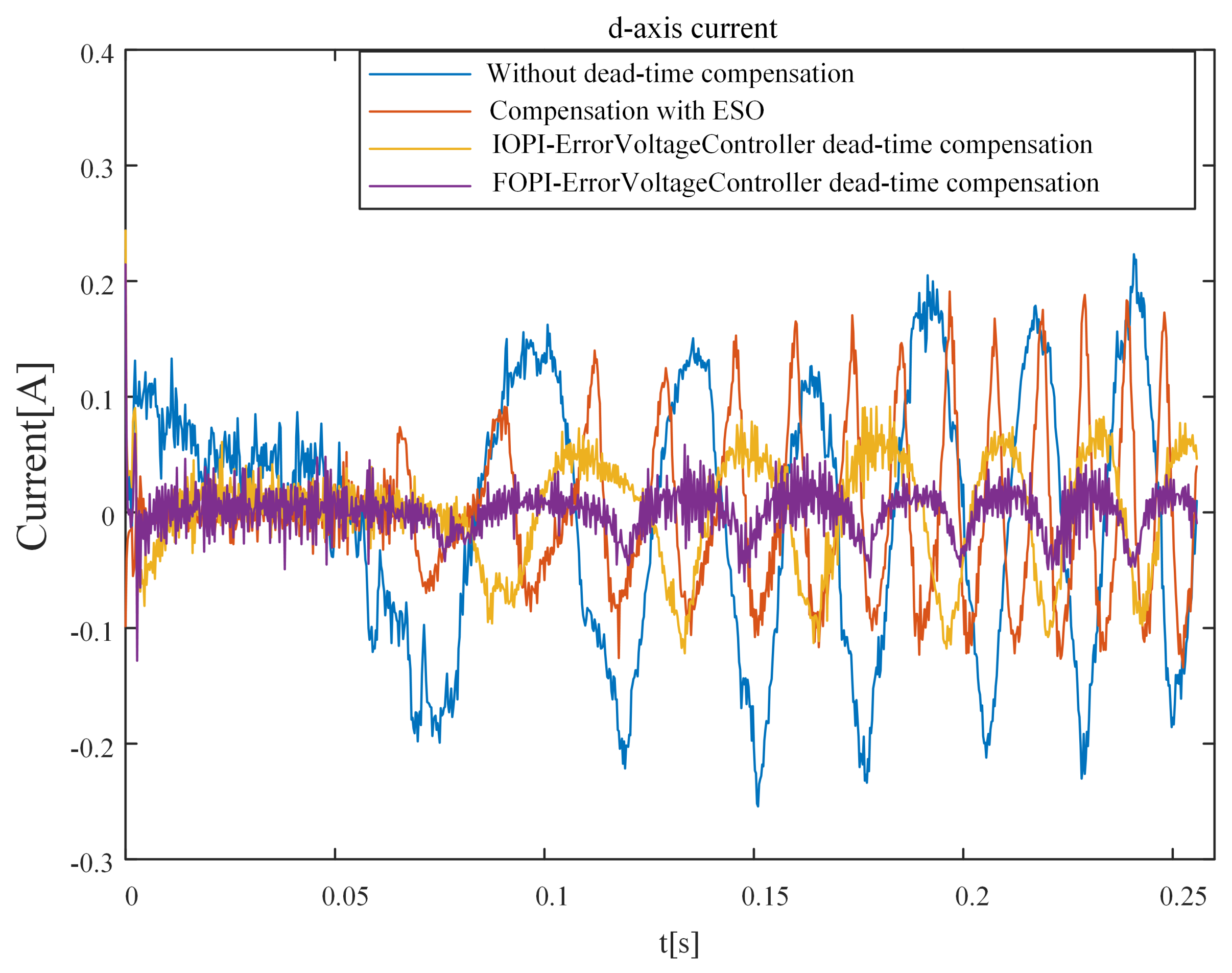
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lewicki, A. Dead-time effect compensation based on additional phase current measurements. IEEE Trans. Ind. Electron. 2015, 62, 4078–4085. [Google Scholar] [CrossRef]
- Mannen, T.; Fujita, H. Dead-Time Compensation Method Based on Current Ripple Estimation. IEEE Trans. Power Electron. 2015, 30, 4016–4024. [Google Scholar] [CrossRef]
- Dafang, W.; Bowen, Y.; Cheng, Z.; Chuanwei, Z.; Ji, Q. A Feedback-Type Phase Voltage Compensation Strategy Based on Phase Current Reconstruction for ACIM Drives. IEEE Trans. Power Electron. 2014, 29, 5031–5043. [Google Scholar] [CrossRef]
- Wu, Z.; Ding, K.; Yang, Z.; He, G. Analytical Prediction and Minimization of Deadtime-Related Harmonics in Permanent Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2020, 68, 7736–7746. [Google Scholar] [CrossRef]
- Tang, Z.; Akin, B. A new LMS algorithm based deadtime compensation method for PMSM FOC drives. IEEE Trans. Ind. Appl. 2018, 54, 6472–6484. [Google Scholar] [CrossRef]
- Qiu, T.; Wen, X.; Zhao, F. Adaptive-linear-neuron-based dead-time effects compensation scheme for PMSM drives. IEEE Trans. Power Electron. 2015, 31, 2530–2538. [Google Scholar] [CrossRef]
- Zhu, H.; Chen, Y.; Lei, H.; Chen, D.; Li, Z. A New Dead-time Compensation Method Based on LMS Algorithm for PMSM. J. Phys. Conf. Ser. 2021, 1754, 012203. [Google Scholar] [CrossRef]
- Liu, G.; Wang, D.; Jin, Y.; Wang, M.; Zhang, P. Current -Detection-Independent Dead-Time Compensation Method Based on Terminal Voltage A/D Conversion for PWM VSI. IEEE Trans. Ind. Electron. 2017, 64, 7689–7699. [Google Scholar] [CrossRef]
- Su, J.H.; Hsu, B.C. Application of small-gain theorem in the dead-time compensation of voltage-source-inverter drives. IEEE Trans. Ind. Electron. 2005, 52, 1456–1458. [Google Scholar] [CrossRef]
- Tang, N.; Brown, I.P. Framework and Solution Techniques for Suppressing Electric Machine Winding MMF Space Harmonics by Varying Slot Distribution and Coil Turns. IEEE Trans. Magn. 2018, 54, 1–12. [Google Scholar] [CrossRef]
- Lin, C.; Xing, J.; Zhuang, X. Dead-Time Correction Applied for Extended Flux-Based Sensorless Control of Assisted PMSMs in Electric Vehicles. Electronics 2021, 10, 220. [Google Scholar] [CrossRef]
- Miyama, Y.; Hazeyama, M.; Hanioka, S.; Watanabe, N.; Daikoku, A.; Inoue, M. PWM Carrier Harmonic Iron Loss Reduction Technique of Permanent-Magnet Motors for Electric Vehicles. IEEE Trans. Ind. Appl. 2016, 52, 2865–2871. [Google Scholar] [CrossRef]
- Herman, L.; Papic, I.; Blazic, B. A Proportional-Resonant Current Controller for Selective Harmonic Compensation in a Hybrid Active Power Filter. IEEE Trans. Power Deliv. 2014, 29, 2055–2065. [Google Scholar] [CrossRef]
- Shi, J.; Li, S. Analysis and compensation control of dead-time effect on space vector PWM. J. Power Electron. 2015, 15, 431–442. [Google Scholar] [CrossRef] [Green Version]
- Karttunen, J.; Kallio, S.; Peltoniemi, P.; Silventoinen, P. Current Harmonic Compensation in Dual Three-Phase PMSMs Using a Disturbance Observer. IEEE Trans. Ind. Electron. 2016, 63, 583–594. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiao, W.; Wu, L. Dead-Time Effect Analysis and Compensation for a Sliding-Mode Position Observer-Based Sensorless IPMSM Control System. IEEE Trans. Ind. Appl. 2015, 51, 2528–2535. [Google Scholar] [CrossRef]
- Guha, A.; Narayanan, G. Impact of Dead Time on Inverter Input Current, DC-Link Dynamics, and Light-Load Instability in Rectifier-Inverter-Fed Induction Motor Drives. IEEE Trans. Ind. Appl. 2018, 54, 1414–1424. [Google Scholar] [CrossRef]
- Khurram, A.; Rehman, H.; Mukhopadhyay, S.; Ali, D. Comparative Analysis of Integer-order and Fractional-order Proportional Integral Speed Controllers for Induction Motor Drive Systems. J. Power Electron. 2018, 18, 723–735. [Google Scholar]
- Zheng, W.; Pi, Y. Study of the fractional order proportional integral controller for the permanent magnet synchronous motor based on the differential evolution algorithm. ISA Trans. 2016, 63, 387–393. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Chen, Y. Fractional order [proportional derivative] controller for a class of fractional order systems. Automatica 2009, 45, 2446–2450. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y.Q.; Wang, C.Y.; Pi, Y.G. Tuning fractional order proportional integral controllers for fractional order systems. J. Process. Control. 2010, 20, 823–831. [Google Scholar] [CrossRef]
- Choi, J.W.; Sul, S.K. Inverter output voltage synthesis using novel dead time compensation. IEEE Trans. Power Electron. 1996, 11, 221–227. [Google Scholar] [CrossRef]
- Li, Y.; Sheng, H.; Chen, Y. Impulse response invariant discretization of a generalized commensurate fractional order filter. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 191–196. [Google Scholar]
- Poli, R. Analysis of the Publications on the Applications of Particle Swarm Optimisation. J. Artif. Evol. Appl. 2008, 2008, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Gaing, Z.L. A particle swarm optimization approach for optimum design of PID controller in AVR system. IEEE Trans. Energy Convers. 2004, 19, 384–391. [Google Scholar] [CrossRef] [Green Version]
- Yoshida, H.; Kawata, K.; Fukuyama, Y.; Takayama, S.; Nakanishi, Y. A particle swarm optimization for reactive power and voltage control considering voltage security assessment. IEEE Trans. Power Syst. 2000, 15, 1232–1239. [Google Scholar] [CrossRef] [Green Version]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Wang, B.; Wang, S.; Peng, Y.; Pi, Y.; Luo, Y. Design and High-Order Precision Numerical Implementation of Fractional-Order PI Controller for PMSM Speed System Based on FPGA. Fractal Fract. 2022, 6, 218. [Google Scholar] [CrossRef]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| For Optimal IOPI Controler | For Optimal FOPI Controller | ||
|---|---|---|---|
| populations | 40 | populations | 40 |
| 40 | 40 | ||
| 0.8 | 0.8 | ||
| 0.2 | 0.2 | ||
| 0.3 | 0.3 | ||
| 2.5 | 2.5 | ||
| 0.3 | 0.3 | ||
| 2.5 | 2.5 | ||
| [3,40,3,40] | [3,40,3,40,0.2,0.2] | ||
| [−3,−40,−3,−40] | [−3,−40,−3,−40,−0.2,−0.2] | ||
| [2,1000,20,1000] | [2,1000,20,1000,0,0] | ||
| [0,0,0,0] | [0,0,0,0,−2,−2] | ||
| Paramters of IOPI Controller | Paramters of FOPI Controller | ||
|---|---|---|---|
| 3.05745 | 2.186 | ||
| 431.402 | 491.66 | ||
| 2.7419 | 1.693 | ||
| 707.891 | 503.683 | ||
| 0.651 | |||
| 0.722 | |||
| IOPI Controller | FOPI Controller | |
|---|---|---|
| Optimal fitness function value of PSO algorithm | ||
| Optimal fitness function value of ABC algorithm |
| Parameters of PMSM | Specification of PWM Inverter | ||
|---|---|---|---|
| Pole pairs | 5 | DC link | 310 [V] |
| Resistance (Rs) | 0.38 [] | PWM period | 50 [s] |
| Inductance (Ls) | 4.37 [mH] | Turn-on/off delay | 180/320 [s] |
| Flux linkage (lam) | 0.066 [Wb] | Dead-time | 2.1 [s] |
| Inertia (J) | 0.027 [kg·m2] | IGBT/Diode Ron | 36 [m] |
| viscous daping (B) | 0.0502 [N·m·s] | Saturation Volt | 1.1 [V] |
| without Compensation | IOPI | FOPI | ESO [14] | |
|---|---|---|---|---|
| overshoot (%) | 9.05 | 4.53 | 4.767 | 0.0 |
| rise time (s) | 0.01825 | 0.0037 | 0.0017 | 0.00986 |
| settling time (s) | \ | 0.03 | 0.024 | 0.00986 |
| current ripple amplitude (A) | 0.184 | 0.0359 | 0.0175 | 0.08467 |
| without Compensation | IOPI | FOPI | ESO [14] | |
|---|---|---|---|---|
| Current ripple amplitude (A) | 0.671 | 0.23 | 0.097 | 0.33 |
| without Compensation | IOPI | FOPI | ESO [14] | |
|---|---|---|---|---|
| Current clamping time (s) | 0.0102 | 0.003258 | 0.001751 | 0.00482 |
| Resistance () | Inductance (mH) | Inertia (kg·m2) | Viscous Damping (N·m·s) | |
|---|---|---|---|---|
| error parameters (1) | 0.514 | 4.90 | 0.0396 | 0.023 |
| error parameters (2) | 0.769 | 2.75 | 0.033 | 0.0299 |
| error parameters (3) | 0.769 | 1.96 | 0.0134 | 0.0172 |
| actual parameters | 0.38 | 4.37 | 0.027 | 0.05027 |
| without Compensation | IOPI | FOPI | ESO [14] | |
|---|---|---|---|---|
| overshoot (%) | 2.3 | 3.8 | 1.7 | 1.82 |
| rise time (s) | 0.036 | 0.00875 | 0.00675 | 0.00375 |
| settling time (s) | \ | 0.0417 | 0.007 | 0.00376 |
| current ripple amplitude (A) | 0.1852 | 0.065 | 0.0586 | 0.089 |
| without Compensation | IOPI | FOPI | ESO [14] | |
|---|---|---|---|---|
| Current ripple amplitude (A) | 0.424 | 0.1851 | 0.0732 | 0.291 |
| without Compensation | IOPI | FOPI | ESO [14] | |
|---|---|---|---|---|
| Current clamping time (s) | 0.0112 | 0.00375 | 0.00175 | 0.00195 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Luo, Y.; Luo, X.; Chen, P.; Chen, Y. Optimal FOPI Error Voltage Control Dead-Time Compensation for PMSM Servo System. Fractal Fract. 2023, 7, 274. https://doi.org/10.3390/fractalfract7030274
Li F, Luo Y, Luo X, Chen P, Chen Y. Optimal FOPI Error Voltage Control Dead-Time Compensation for PMSM Servo System. Fractal and Fractional. 2023; 7(3):274. https://doi.org/10.3390/fractalfract7030274
Chicago/Turabian StyleLi, Fumin, Ying Luo, Xin Luo, Pengchong Chen, and Yangquan Chen. 2023. "Optimal FOPI Error Voltage Control Dead-Time Compensation for PMSM Servo System" Fractal and Fractional 7, no. 3: 274. https://doi.org/10.3390/fractalfract7030274
APA StyleLi, F., Luo, Y., Luo, X., Chen, P., & Chen, Y. (2023). Optimal FOPI Error Voltage Control Dead-Time Compensation for PMSM Servo System. Fractal and Fractional, 7(3), 274. https://doi.org/10.3390/fractalfract7030274