
Adaptive Neural Network Synchronization Control for Uncertain Fractional-Order Time-Delay Chaotic Systems
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
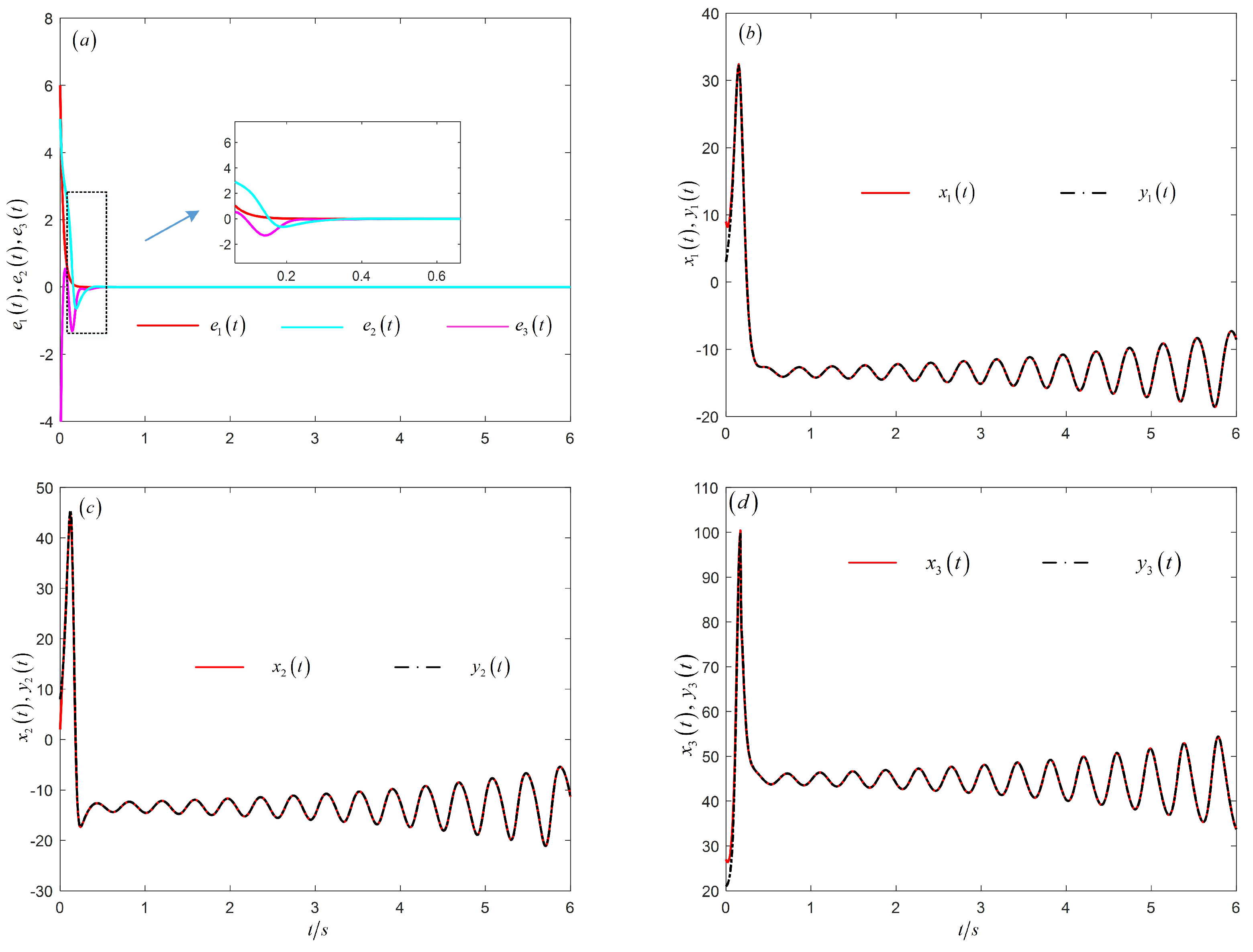
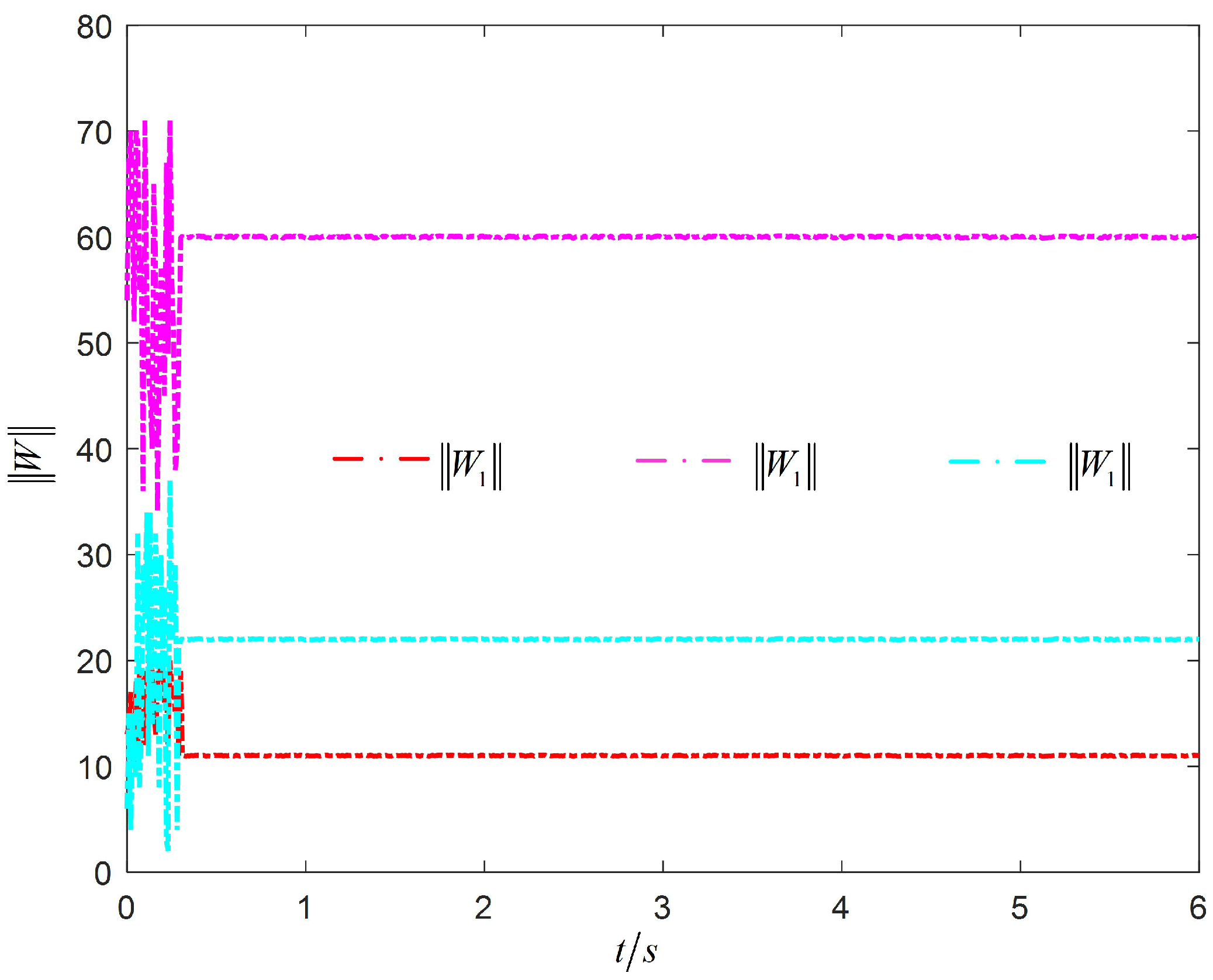
- On the basis of Barbarat’s lemma, an adaptive RBF neural network controller was designed that realizes the synchronization control of FOTDCSs with nonlinear uncertainty and external disturbance.
- (2)
- When the driving system and the response system have different time delays, they could also achieve synchronization under the action of the controller.
- (3)
- A numerical simulation realized the synchronous control of the uncertain fractional time-delay Liu chaotic system and the uncertain fractional time-delay financial chaotic system. The theoretical proof and simulation results show the effectiveness of the controller.
2. Preliminaries
2.1. Introduction to Fractional Calculus
2.2. Introduction to Radial Basis Neural Network
3. Design and Stability Analysis of the Adaptive Controller Based on the RBF Neural Network
3.1. Synchronization of Uncertain FOTDCSs
3.2. Adaptive Controller Based on the RBF Neural Network
3.3. Stability Analysis
4. Numerical Example
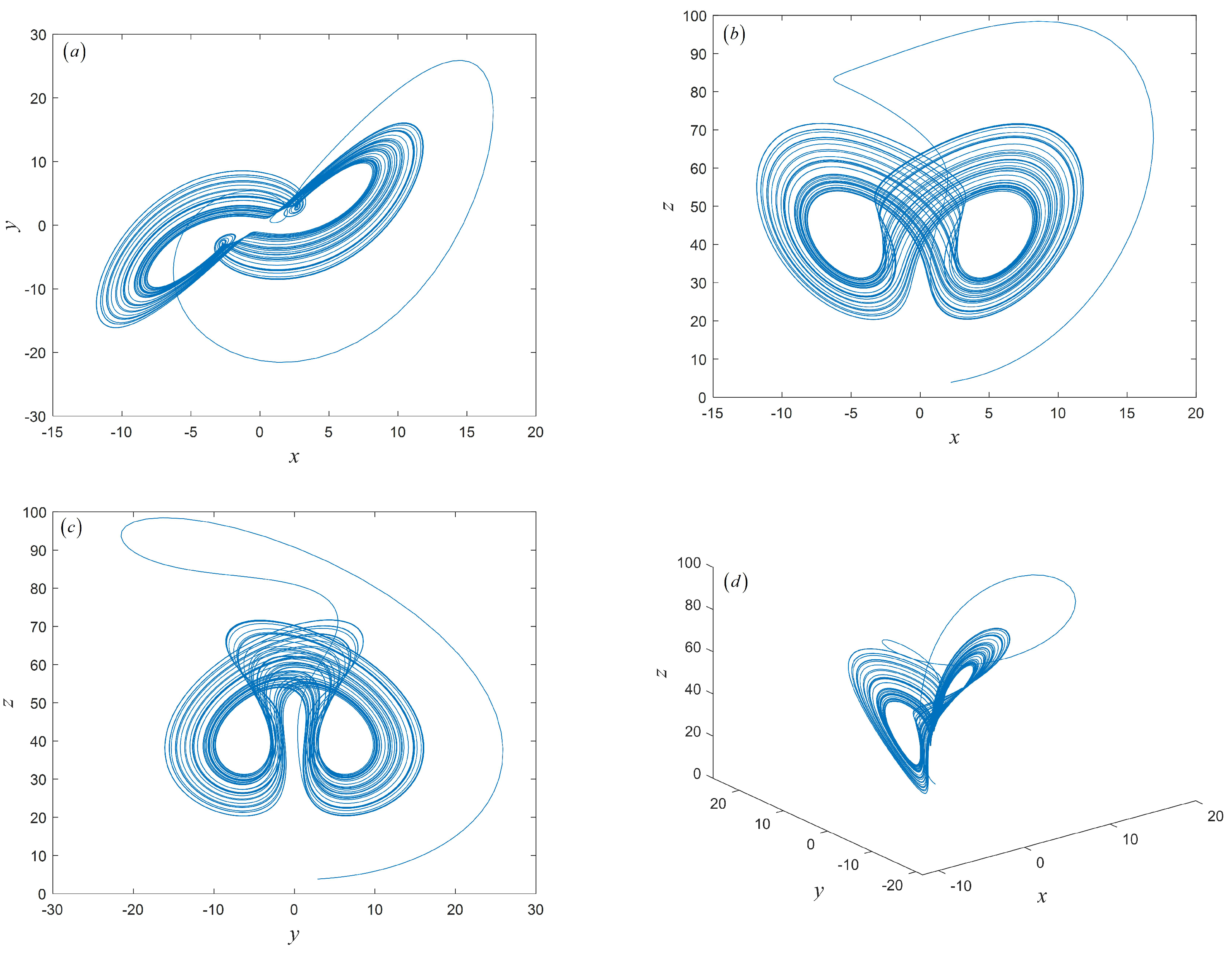
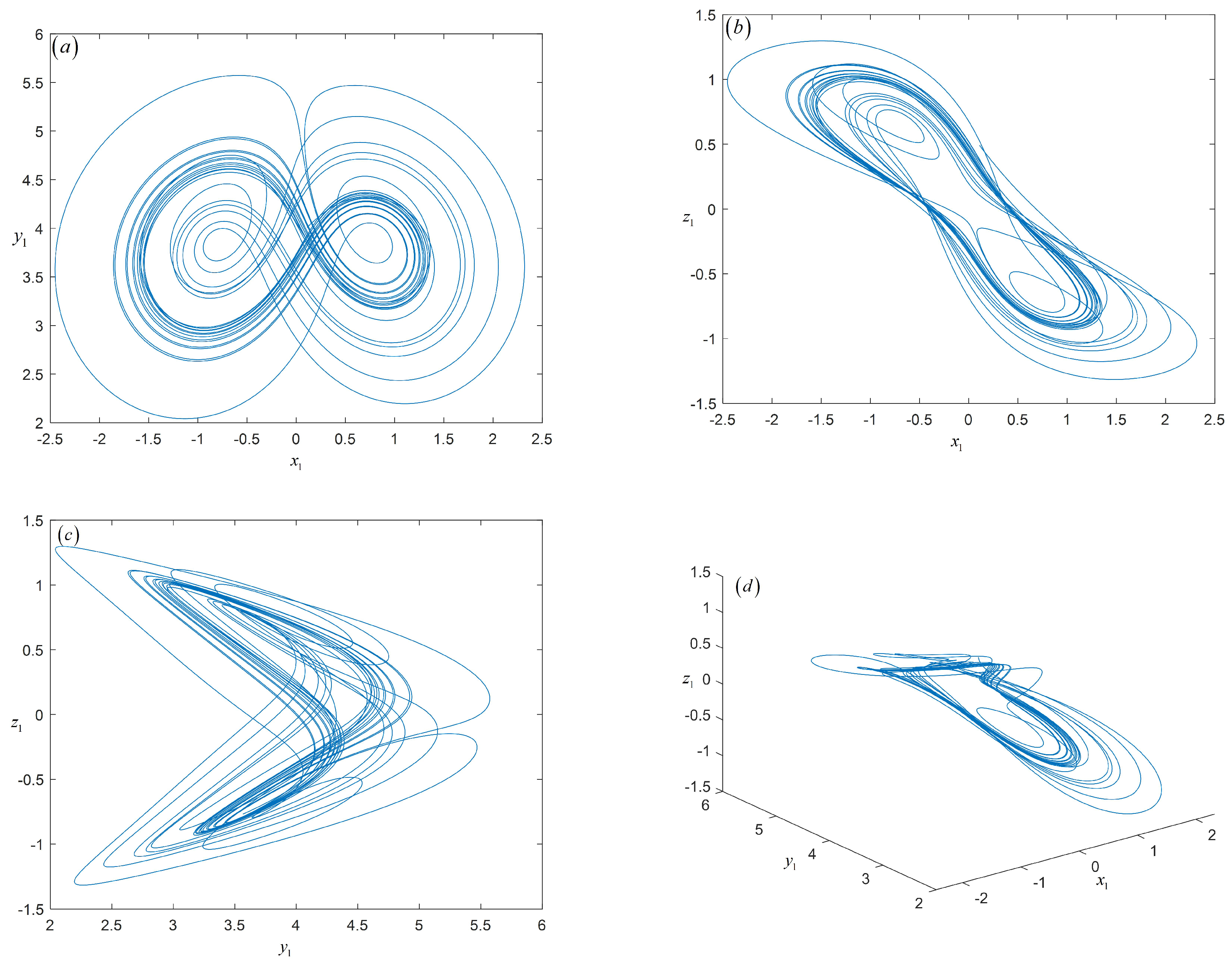
4.1. Fractional-Order Time-Delay Chaotic System
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rakkiyappan, R.; Chandrasekar, A.; Lakshmanan, S. Effects of leakage time-varying delays in Markovian jump neural networks with impulse control. Neurocomputing 2013, 121, 365–378. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Chandrasekar, A.; Lakshmanan, S. Exponential stability of Markovian jumping stochastic Cohen-Grossberg neural networks with mode-dependent probabilistic time-varying delays and impulses. Neurocomputing 2014, 131, 265–277. [Google Scholar] [CrossRef]
- Li, T.; Wang, T.; Song, A.; Fei, S. Combined convex technique on delay-dependent stability for delayed neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1459–1466. [Google Scholar] [CrossRef] [PubMed]
- Deng, Y.M.; Fan, H.F.; Wu, S.M. A hybrid ARIMA-LSTM model optimized by BP in the forecast of outpatient visits. J. Ambient Intell. Humaniz. Comput. 2020. [Google Scholar] [CrossRef]
- Deng, W.; Li, C.; Lu, J. Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 2007, 48, 409–416. [Google Scholar] [CrossRef]
- Xiao, M.; Zheng, W.; Cao, J. Bifurcation and control in a neural network with small and large delays. Neural Netw. 2013, 44, 132–142. [Google Scholar] [CrossRef]
- Choi, S.W.; Kim, B.H.S. Applying PCA to Deep Learning Forecasting Models for Predicting PM2.5. Sustainability 2021, 13, 3726. [Google Scholar] [CrossRef]
- Xiao, D.Y.; Su, J.X. Research on Stock Price Time Series Prediction Based on Deep Learning and Autoregressive Integrated Moving Average. Sci. Program.-Neth. 2022, 2022, 4758698. [Google Scholar] [CrossRef]
- Aghababa, M. Control of fractional-order systems using chatter-free sliding mode approach. J. Comput. Nonlinear Dyn. 2014, 9, 031003. [Google Scholar] [CrossRef]
- Aghababa, M. No-chatter variable structure control for fractional nonlinear complex systems. Nonlinear Dyn. 2013, 73, 2329–2342. [Google Scholar] [CrossRef]
- Aghababa, M. Synchronization and stabilization of fractional second-order nonlinear complex systems. Nonlinear Dyn. 2015, 80, 1731–1744. [Google Scholar] [CrossRef]
- Pecora, L.; Carroll, T. Synchronization in chaotic system. Phys. Rev. Lett. 1990, 64, 821–824. [Google Scholar] [CrossRef] [PubMed]
- Megherbi, O.; Hamiche, H.; Djennoune, S. A New Contribution for the Impulsive Synchronization of Fractional-Order Discrete-Time Chaotic Systems. Nonlinear Dyn. 2017, 980, 1519–1533. [Google Scholar] [CrossRef]
- Park, J.H. Adaptive modified projective synchronization of a unified chaotic system with an uncertain parameter. Chaos Solitons Fractals 2017, 34, 1552–1559. [Google Scholar] [CrossRef]
- Mobayen, S. Chaos Synchronization of Uncertain Chaotic Systems Using Composite Nonlinear Feedback Based Integral Sliding Mode Control. ISA Trans. 2018, 77, 100–111. [Google Scholar] [CrossRef] [PubMed]
- Sangyun, L.; Mignon, P.; Jaeho, B. Robust adaptive synchronization of a class of chaotic systems via fuzzy bilinear observer using projection operator. Inf. Sci. 2017, 402, 182–198. [Google Scholar]
- Chou, H.; Chuang, C.; Wang, W. A Fuzzy-Model-Based Chaotic Synchronization and Its Implementation on a Secure Communication System. IEEE Trans. Inf. Forensics Secur. 2013, 8, 2177–2185. [Google Scholar] [CrossRef]
- Xu, G.; Xu, J.; Xiu, C.; Liu, F.; Zang, Y. Secure communication based on the synchronous control of hysteretic chaotic neuron. Neurocomputing 2017, 227, 108–112. [Google Scholar] [CrossRef]
- Mainieri, R.; Rehacek, J. Projective synchronization in three-dimensional chaotic systems. Phys. Rev. Lett. 1999, 82, 3024–3045. [Google Scholar] [CrossRef]
- Velmurugan, G.; Rakkiyappan, R. Hybrid Projective Synchronization of Fractional-Order Chaotic Complex Nonlinear Systems with Time Delays. J. Comput. Nonlinear Dyn. 2016, 11, 031016. [Google Scholar] [CrossRef]
- Wang, S.; Yu, Y.; Wen, G. Hybrid projective synchronization of time-delayed fractional order chaotic systems. Nonlinear-Anal.-Hybrid Syst. 2014, 11, 129–138. [Google Scholar] [CrossRef]
- Wang, X.Y.; He, Y.J. Projective synchronization of fractional order chaotic system based on linear separation. Phys. Lett. A 2008, 372, 435–441. [Google Scholar] [CrossRef]
- Bao, H.B.; Cao, J. Projective synchronization of fractional-order memristor-based neural networks. Neural Netw. 2015, 63, 1–9. [Google Scholar] [CrossRef]
- Zhou, P.; Zhu, W. Function projective synchronization for fractional-order chaotic systems. Nonlinear Anal. Real World Appl. 2011, 12, 811–816. [Google Scholar] [CrossRef]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag–Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef]
- Wang, X.Y.; Zhang, X.P.; Ma, C. Modified projective synchronization of fractional-order chaotic systems via active sliding mode control. Nonlinear Dyn. 2012, 69, 511–517. [Google Scholar] [CrossRef]
- Yu, J.; Hu, C.; Jiang, H.; Fan, X. Projective synchronization for fractional neural networks. Neural Netw. 2014, 49, 87–95. [Google Scholar] [CrossRef]
- Wang, S.; Yu, Y.G.; Diao, M. Hybrid projective synchronization of chaotic fractional order systems with different dimensions. Phys. A 2010, 389, 4981–4988. [Google Scholar] [CrossRef]
- Wu, R.C.; Hei, X.D.; Chen, L.P. Finite-time stability of fractional-order neural networks with delay. Commun. Theor. Phys. 2013, 60, 189–193. [Google Scholar] [CrossRef]
- Lazarevic, M.; Debeljkovic, D. Finite time stability analysis of linear autonomous fractional order systems with delayed state. Asian J. Control 2005, 7, 440–447. [Google Scholar] [CrossRef]
- Lazarevic, M.; Spasic, A. Finite-time stability analysis of fractional order time-delay systems: Gronwall’s approach. Math. Comput. Model. 2009, 49, 475–481. [Google Scholar] [CrossRef]
- Lorenz, C.; Hartley, T. Variable order and distributed order fractional operators. Nonlinear Dyn. 2002, 29, 57–98. [Google Scholar] [CrossRef]
- Samko, S.; Kilbas, A.; Marichev, O. Fractional Integrals and Derivatives; Gordon and Breach Science Publishers: Basel, Switzerland, 1993. [Google Scholar]
- Gorenflo, R.; Mainardi, F. Fractional Calculus; Springer: New York, NY, USA, 1997. [Google Scholar]
- Liu, H.; Pan, Y.; Li, S. Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2209–2217. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, W.; Jiang, Z.; Huang, X.; Ding, Q. Adaptive Neural Network Synchronization Control for Uncertain Fractional-Order Time-Delay Chaotic Systems. Fractal Fract. 2023, 7, 288. https://doi.org/10.3390/fractalfract7040288
Yan W, Jiang Z, Huang X, Ding Q. Adaptive Neural Network Synchronization Control for Uncertain Fractional-Order Time-Delay Chaotic Systems. Fractal and Fractional. 2023; 7(4):288. https://doi.org/10.3390/fractalfract7040288
Chicago/Turabian StyleYan, Wenhao, Zijing Jiang, Xin Huang, and Qun Ding. 2023. "Adaptive Neural Network Synchronization Control for Uncertain Fractional-Order Time-Delay Chaotic Systems" Fractal and Fractional 7, no. 4: 288. https://doi.org/10.3390/fractalfract7040288
APA StyleYan, W., Jiang, Z., Huang, X., & Ding, Q. (2023). Adaptive Neural Network Synchronization Control for Uncertain Fractional-Order Time-Delay Chaotic Systems. Fractal and Fractional, 7(4), 288. https://doi.org/10.3390/fractalfract7040288