1. Introduction
Controlling the pitch angle
(attitude) of an aircraft (see
Figure 1) is relevant in the aviation industry, since an important part of the pilots’ tasks is to maintain a specific attitude, that is to say, to achieve a straight and level flight, as well as to ascend or to descend with a certain angle
(attitude) with respect to the horizon. Since these tasks require the pilot to be diligent, most sophisticated aircraft have an autopilot attitude to complete the job and achieve the following goals:
- -
To relieve the pilot from manipulating the controls, reducing the loads on the plane, and improving navigation accuracy;
- -
To fly the airplane without direct control over the longitudinal control surfaces (elevator or tail).
Small planes widely use classical controllers, such as proportional-integral-derivative (PID) controllers because of their simplicity to maintain the airplane under control [
1,
2,
3,
4,
5]. The main disadvantage is that they do not have adaptation capabilities to face large variations in the operating conditions, external perturbations acting on the plane, or eventual plane parameter variations, since PID parameters are fixed.
In controlling plane trajectories, rather simple controllers, such as the integer order (IO) PID have been reported in the control literature. Only a few attempts have been made to use adaptive or more complex control strategies [
6,
7,
8,
9]. Moreover, techniques, such as μ-synthesis [
10] and nonlinear control [
11] have also been used to control airplanes with good results. In [
11], a tracking controller consisting of feedforward and static state feedback was designed to guarantee uniform asymptotic trajectory tracking. The landing control of an F-18 fighter aircraft based on a PID controller with an active disturbance rejection (ADR) system was studied in [
12]. In [
13], an LQR controller based on genetic algorithms was designed for the longitudinal control of an F-16 fighter aircraft under different flight regimes. The longitudinal control of a B-1 bomber was analyzed in [
14] using an optimal multivariable control approach [
15,
16,
17] of the LQG/LTR type based on an adaptive observer [
18,
19].
Furthermore, in [
9,
12], the longitudinal control of an F-16 Falcon fighter aircraft was studied by applying advanced control techniques, such as MRAC in its combined version (CMRAC), which could serve as a basis for comparison for an extension of the CMRAC techniques to the fractional order case (FO-CMRAC).
Additionally, in [
20], the longitudinal control using backstepping control was applied to a model X-plane similar to the NexStar plane with rectangular wings. In [
21], the longitudinal and lateral control of unmanned vehicles, such as helicopters, were studied. The control approach used is of the adaptive type based on a continuous linearization for different operating points to then apply MRAC.
In [
22], a typical MRAC approach was used (integer order plant and integer adaptive control laws) for the longitudinal control of an F-15 aircraft and the fractional part of this work was the fractional filter that approximates the plant that is newly approximate to an integer transfer function of the plant. Moreover, in this work, two new blocks were used (dynamic inversion and PI compensator blocks) achieving a more complex implementation.
It is important to mention that no attempt has been reported in the technical literature about the use of FO adaptive controllers for the longitudinal control of an airplane in which fractional adaptive laws are applied to an integer plant (airplane model) with no other additional special blocks.
The paper is organized as follows. In
Section 2, the airplane model used in this study is presented for certain flight conditions and controlled by a standard DMRAC.
Section 3 is devoted to the description of the DMRAC strategy.
Section 4 presents some basic concepts of fractional order calculus that will be used in this study, and a new lemma (Lemma 3) that relaxes the stability condition is proposed. In
Section 5, several simulation results are presented with numerical values of the parameters corresponding to the Cessna 182 plane used in this study [
2]. Finally, in
Section 6, some conclusions are drawn.
2. General Concepts on Plane Dynamics and Flight Control
2.1. Mathematical Model of the Longitudinal Movement of a Plane
In this Section, the basic concepts of a plane’s dynamics and its control are presented. In many cases, plane dynamic motion can be modeled assuming small disturbances concerning the airplane’s static stable path (operating point). The differential equations used in this study represent only the plane’s longitudinal movement, although the complete movement is in three dimensions. These equations are considered linear (or linearized) with constant coefficients corresponding to small deviations in the airplane’s operating point.
We consider the static stable path condition of a straight and level flight. The movement equations must consider the aerodynamic force and moment disturbances. By choosing
(angular velocity along the z-axis in rad/s), we obtain the plane small disturbances longitudinal equations separated from the small disturbances directional-lateral equations [
2].
Next, for a better understanding of the variables in the equations that follow,
Table 1 shows the glossary of terms with their respective units used in this paper.
To simplify the analysis,
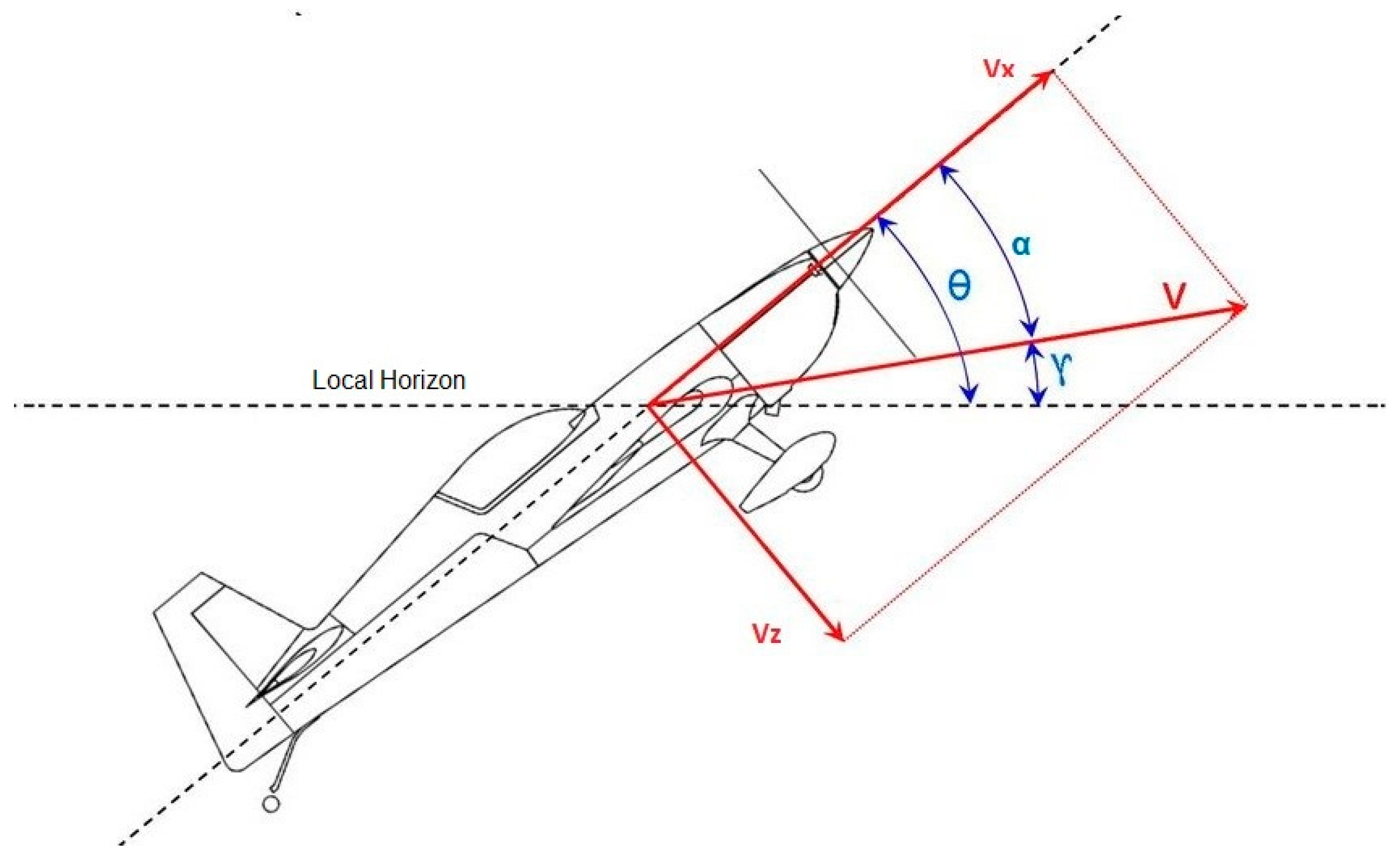
Figure 1 shows the geometry and the longitudinal angles of interest for the aircraft used in this study.
Figure 1.
Fundamental angles of the longitudinal movement of an aircraft (figure uploaded by Baron Johnson [
23]).
Figure 1.
Fundamental angles of the longitudinal movement of an aircraft (figure uploaded by Baron Johnson [
23]).
V is the wind speed relative to the aircraft, θ is the pitch angle, α is the angle of attack, and (it is important to note that this symbol is the same as the order of fractional derivatives, nevertheless this should not be confusing because of the context) γ is the flight path angle. Note that .
The airplane used in this study for the simulations of different adaptive control strategies, in its integer and fractional order versions, is the Cessna-182 utility aircraft, which is very popular due to its low cost and high performance. In addition, this aircraft is widely used in the training process for civil pilots.
Using the plane general dynamic equations and the aerodynamic and trust force disturbances, we obtain the following equations describing the plane’s disturbed longitudinal movement [
2,
8].
where
is the perturbed linear velocity along the longitudinal axis of the aircraft,
is the angle of attack,
is the perturbed pitch angle,
is the tail elevator angle and
,
and
are, respectively, the derivatives of cinematics forward, vertical, and moments variables concerning the variable of interest
i.
Then, a linearized model around a specified operating point is defined allowing for the introduction of basic and advanced control concepts for the resulting dynamical system. First, it is convenient to perform the following change of notation:
to express the set of Equation (1) in the state space matrix form, represented as:
where
are the constant matrices of proper dimensions. Following some algebraic manipulation, we arrive at the following system of equations expressed in state variables:
The matrix representation of System (2) becomes
where
is the system input and
is the system output.
The fractional order direct model reference adaptive control (FO-DMRAC) designed for this application will be later compared with its integer order counterpart (IO-DMRAC). The flight conditions will be those corresponding to a straight and level flight, considering the operating conditions shown in
Table 2.
For more information on the operational and technical characteristics of this aircraft, the reader is referred to [
24].
Additionally,
Table 3 shows the values of the derivative coefficients of Equation (1) or Equation (2) for the operating conditions given in
Table 2.
Performing a state space analysis, it can be shown that the dynamic model of the longitudinal movement of the aircraft for small variations has the input variable and the output variable for dimension 1.
Next, in Equation (4), the Cessna-182 model is represented in state variables for the operating conditions indicated in
Table 1 and
Table 2, resulting in
Furthermore, since the analysis interest is on the longitudinal movement, and in particular it is desired to control the pitch angle (rotation about the Y axis) of the aircraft, then the transfer function of interest is
Therefore, according to Equation (3) or Equation (4), the output will be
. Then, applying the Laplace transform to Equation (4) and imposing null initial conditions, the transfer function
has the form
where
A is a 4 × 4 matrix,
B is a 4 × 1 matrix,
C is a 1 × 4 matrix, and
D = 0.
Then, under these operating conditions, the transfer function of the plant, that is, between the pitch angle
and the elevator angle
, is given by
or equivalently,
Thus, the resulting airplane transfer function is of order 4 () and relative degree 2 ().
Controlling the pitch angle or attitude of the aircraft is of central importance in aeronautics. Thus, an important pilot’s task is to maintain a specific attitude allowing to achieve a straight and level flight, as well as to ascend or descend with a certain degree of attitude concerning the artificial horizon. Since this task is quite demanding for a pilot, most sophisticated aircraft have an autopilot attitude to complete this job. This takes care of two important issues:
- -
Relieving the pilot from the excessive manipulation of the controls, reducing the loads developed on the plane, and thus improving the navigation accuracy;
- -
Flying the airplane without direct control over the longitudinal control surfaces (elevator).
It should be noted that in the state-of-the-art literature review, no implementations of attitude adaptive controllers (pitch angle control) using fractional order controllers have been reported.
2.2. Control Process Description
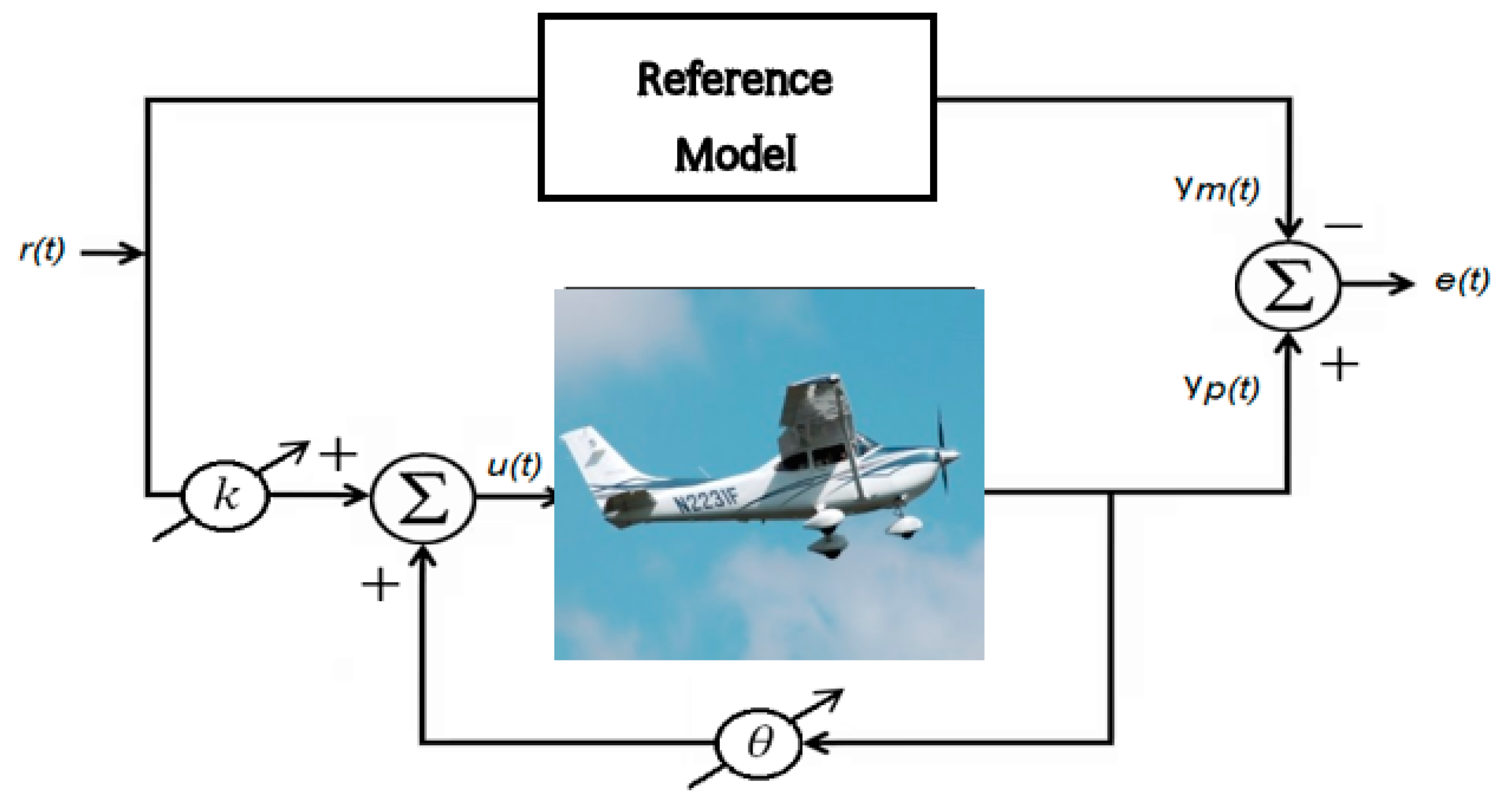
Figure 2 shows a simplified schematic block diagram for the DMRAC, in which parameters
and
are adjusted over time for using their corresponding adaptive laws to maintain the error to be small or zero as t approaches infinity.
In our case,
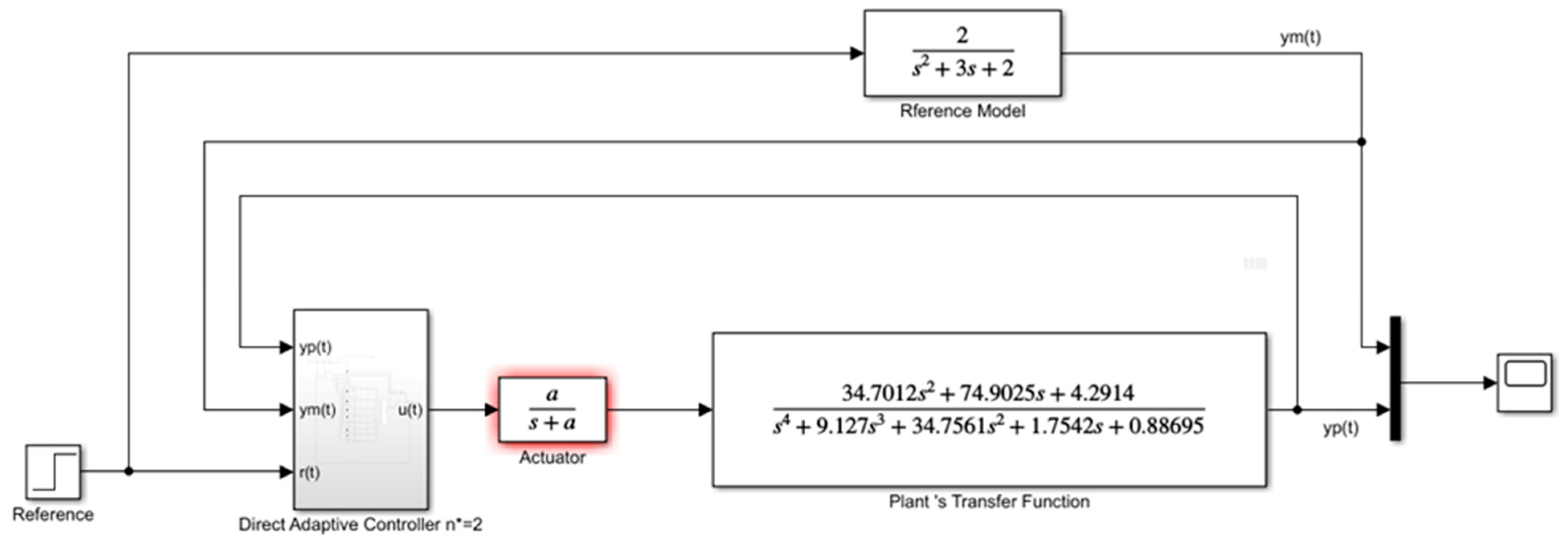
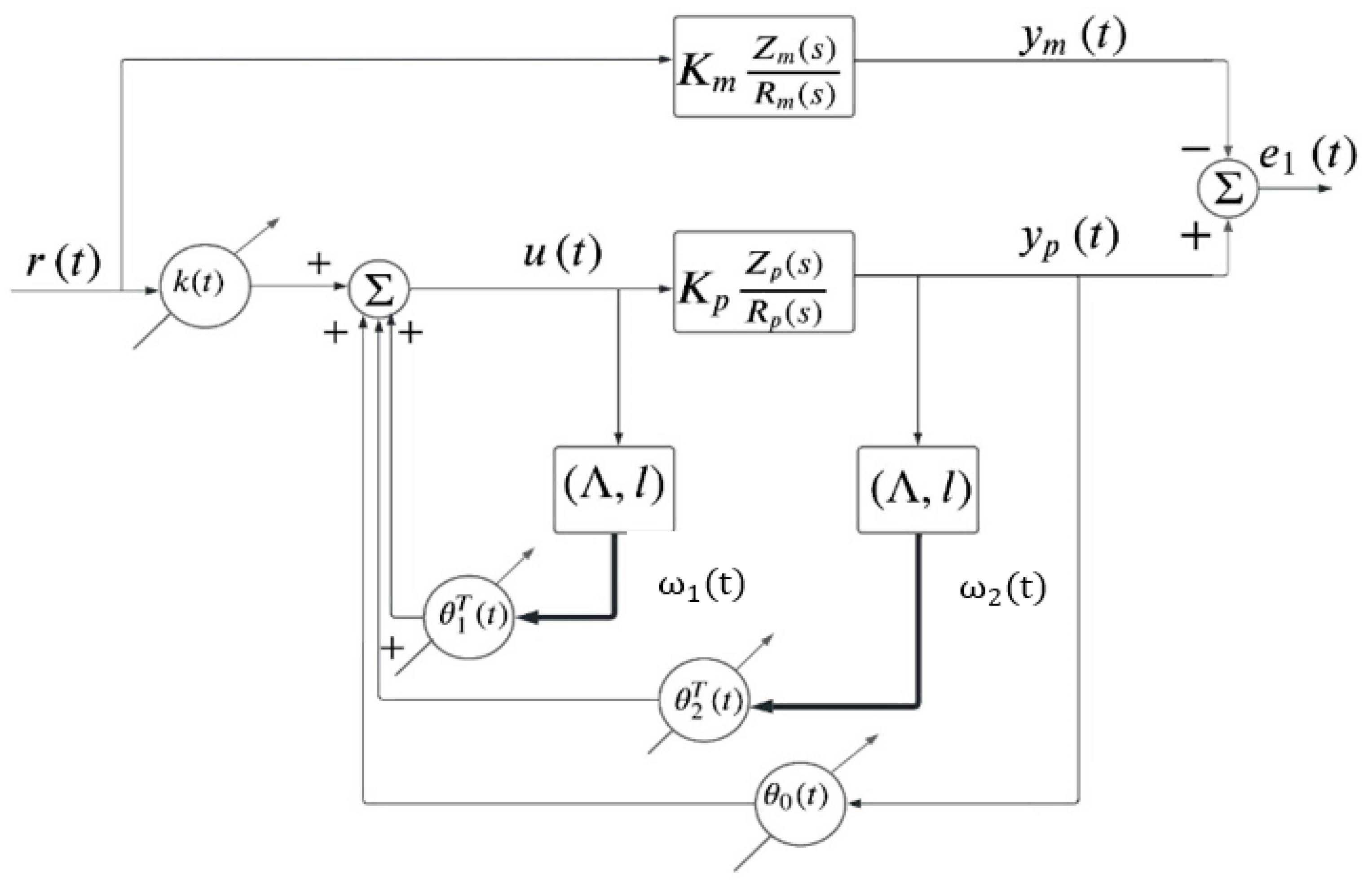
Figure 3 shows in detail the simplified block diagram of the DMRAC which will be used in this study, from analytical and simulation viewpoints. This Figure shows the plant, the reference model, the actuator, and the controller for the relative degree 2 (
). A complete block diagram implementation of the controller can be seen in [
25].
For simplicity, we will consider that the actuator dynamic is fast enough for considering this transfer function as a unity (the same assumption is made for the sensor dynamic which is not shown in the block diagram).
It is also interesting to show the behavior of the system output
, when the model reference output, denoted as
changes over time.
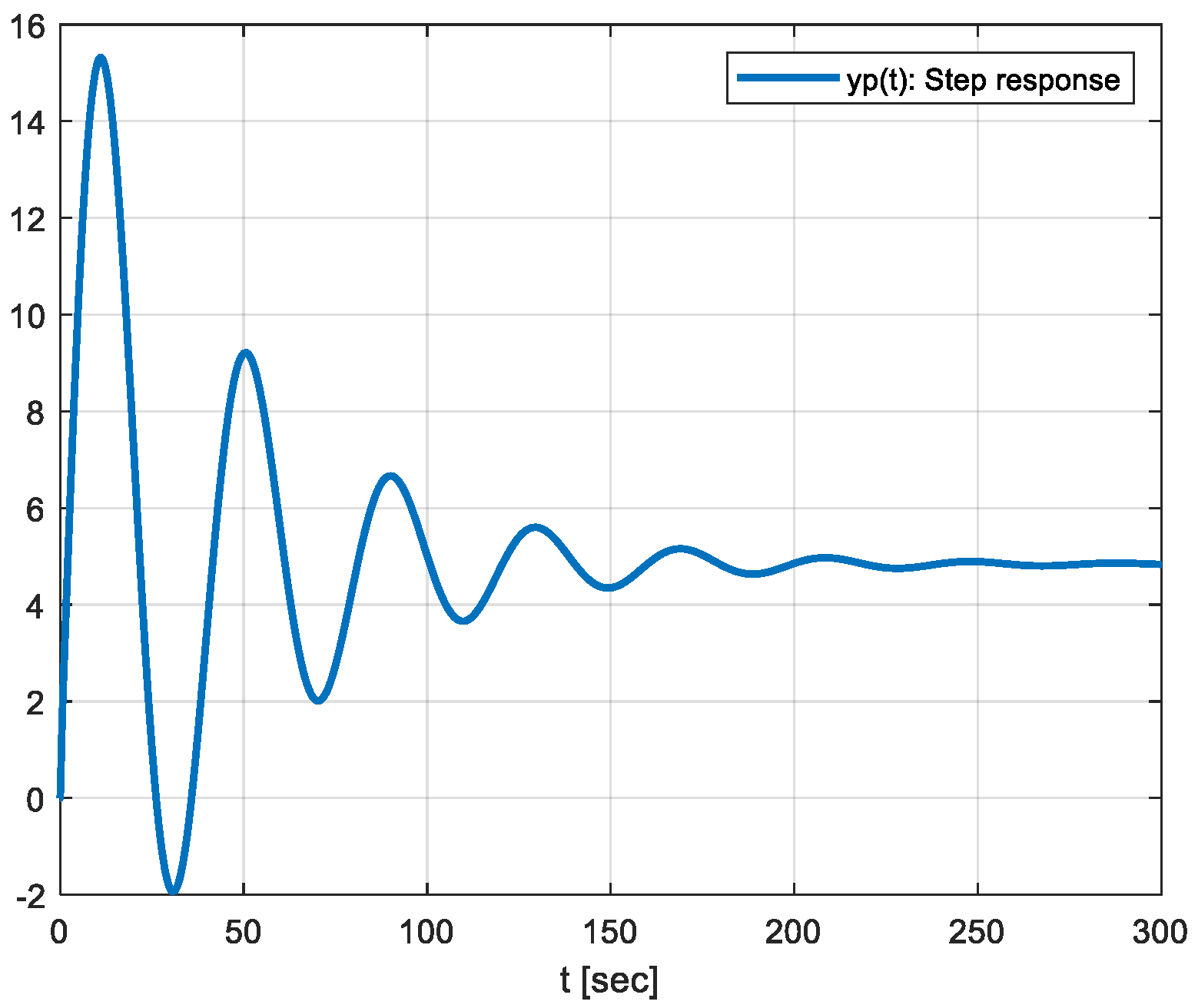
Figure 4 shows the evolution of the system output
in open-loop when the input
is a unit step at
t = 0.
From
Figure 4 we can deduce that for any step change in the reference, the pilot should constantly manipulate the plane for almost 200 s to maintain a straight and level flight, which is a demanding task besides the navigation activities, and this motivates the development of automatic control strategies to help pilot duties.
4. Fractional Calculus Overview
In this section, we present some definitions and concepts on the derivative and integral operators of the fractional order [
26,
27] that will be used in the stability analysis of the implementation of the FO-DMRAC for flight control.
Definition 1 ([27]). The Riemann–Liouville fractional integral of order of a function is defined bywhere is the Gamma function defined as Definition 2 ([27]). Let and . The Caputo fractional derivative of order of a function is defined as Some additional tools (lemmas and theorems) that are useful in the stability analysis of the fractional order adaptive control systems are presented in what follows.
Lemma 1 (Principle of fractional comparison)
. Let be a vector of differentiable functions. Then, the following inequality holds [
28,
29,
30,
31]
where is a symmetric square matrix of constant coefficients and positive definite. A proof of Lemma 1 can be found in [
28].
Another lemma that is useful in the study of the evolution of the output error in FO models is the following:
Lemma 2. Let be a uniformly continuous and bounded function. If there exists an such thatthen A proof of this lemma is given in [
30].
For completeness, we state Theorem 1 related to the boundedness and convergence of FO dynamical systems.
Theorem 1. Let the state error and the output error be represented by equationswhere is a Hurwitz matrix and such that given matrix . Then, there exists a matrix such that This implies that the triplet
satisfies the conditions of the Kalman–Yakubovich–Popov Lemma [
25]. Furthermore,
is an unknown constant, but with a known sign,
corresponds to the vector of the non-accessible states error,
is the output error (accessible),
with
is the parameter error vector defined as
with
the estimated parameters (of the controller) and
the unknown ideal parameters (of the controller).
is a vector of available auxiliary signals and
is the fractional order of the plant, whose adaptive adjustment laws estimate the unknown controller parameters, which are given by
with
and
. Then, assuming that
and
are differentiable and uniformly continuous functions, it holds that
The parametric error , the state error and the output error remain bounded for all time;
Furthermore, if the auxiliary signal is bounded, then and also remain bounded;
The mean value of the squared norm of the state error is .
The proof of this theorem can be found in [
32].
Corollary 1. From Theorem 1, it is evident that if (iii) holds, it must also hold that the mean value of the square norm of the output error is , since with a vector has components that are constants.
Finally, a new lemma (Lemma 3) for the case when the relative degree is 2 is stated, that relaxes the hypothesis made on the auxiliary signals in point (ii) of Theorem 1.
Lemma 3. Let us consider a system of order and relative degree represented by the state equationswhose FO adaptive laws to adjust the controller parameters are given byand whose error equation is given by (in this case, the error equation is of integer order, that is to say, with . See Equation (15), is the state matrix of the plant, is the state vector, and are vectors whose input and output are , such that and are monic polynomials of order and n, respectively. is s constant parameter called the high frequency gain, and its sign is known. Without a loss of generality, we will consider that it is positive throughout the entire analysis, and () and is Hurwitz. In addition, it is assumed that the parameters of the plant (gain and coefficients of the polynomials and ) are unknown and their reference model is also of the relative degree 2 () and Hurwitz, where is also Hurwitz. Then, since and are bounded by part (i) of Theorem 1, the auxiliary signals and will also be bounded. This is an important conclusion because we do not need to assume that the auxiliary signals or should be bounded, as is imposed in part (ii) of Theorem 1.
Proof. Assuming that and are uniformly continuous and differentiable, and based on Theorem 1, in which it has been shown that both and are bounded, then, will also be bounded, since is bounded, differentiable, and uniformly continuous. Then, since the auxiliary signals and are part of the equation for (Equation (18)), then must be bounded and will also be bounded, since is with Hurwitz. This concludes the proof. □
In our case, the control law is but it can also be the classical adaptive control law as long as the structure of the error equation is of Equation (18) type, in which case, is replaced by .
Remark 1. Lemma 3 can be easily extended to the general case when as long as of Equation (15) is equal to 1 as is the case of Equation (18).
This lemma allows us to relax the hypothesis that must be considered in Theorem 1, in order to prove that the FO derivatives are bounded, the auxiliary signal should also be bounded, which is not necessary to impose in the case of . In other cases, with , only Theorem 1 should be used by now.
Furthermore, if the auxiliary signal is bounded (as shown in Lemma 3), then Theorem 1 guarantees that the squared norm of the state error and the output tend to 0, as t tends to infinity. Thus, the stability of the proposed FO adaptive control system has been proved.
FO-DMRAC Algorithm
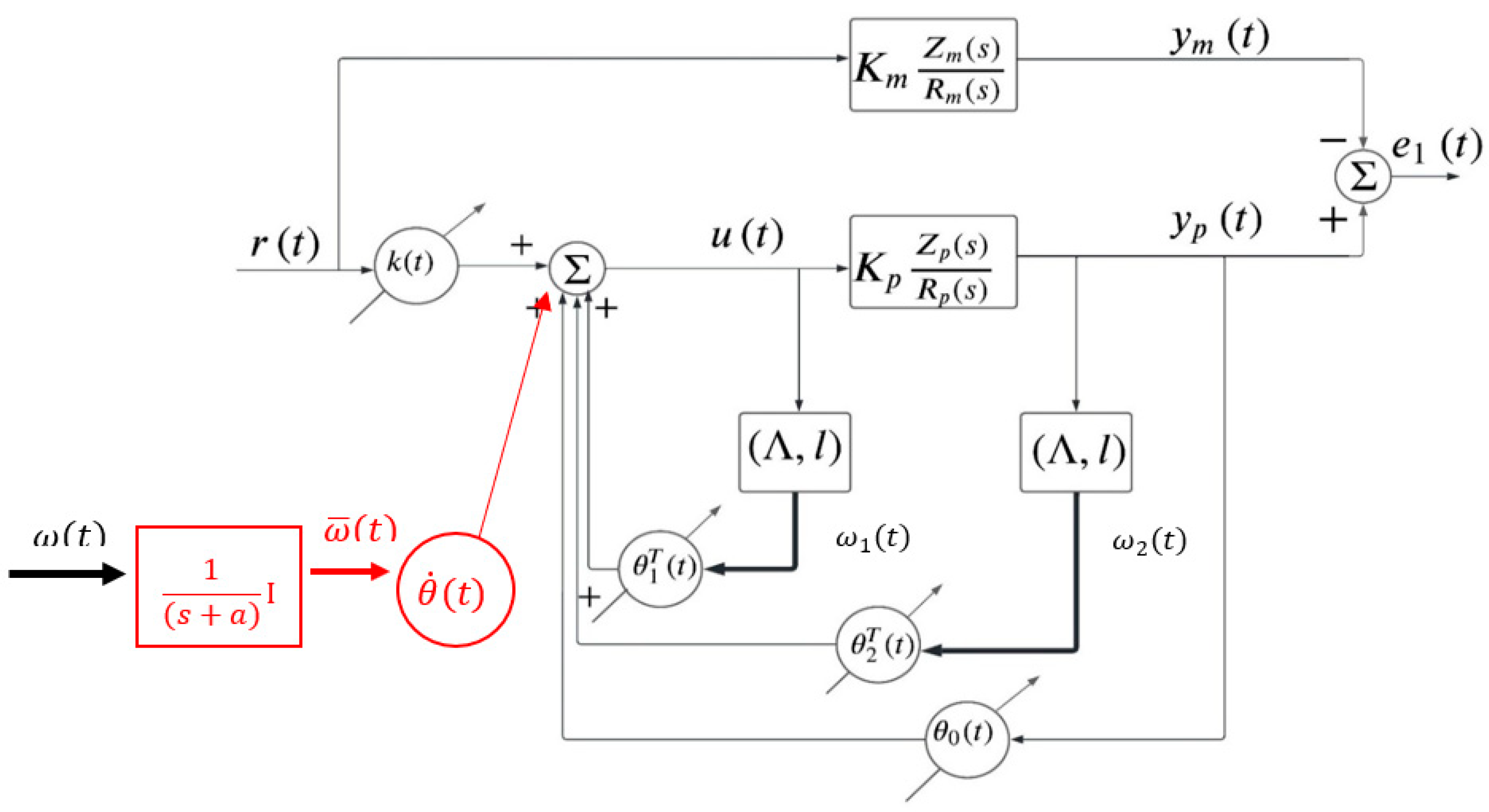
Figure 6 shows the block diagram of the FO-DMRAC for the specific case when
. Since the equation of the plant is of integer order, the only equations that change are the adaptive laws. For comparison purposes, it is interesting to note that for the IO case and
, these adaptive laws are given by
and for the FO case, these adaptive laws become
The control law in both cases is given by
where
with
, an arbitrary scalar is greater than 0. For simplicity, we will choose
. Furthermore, the high frequency gain of the plant is
(see Equation (7)), which is supposed to be unknown, but its sign is assumed to be known
.
5. Simulation Results and Comparisons
Computer simulations were performed in MATLAB-Simulink [
33,
34]. For all simulations, zero initial conditions were considered for the airplane.
Table 4 shows the implementation details of the IO-DMRACs and the FO-DMRACs.
Fractional adaptive laws were implemented using the Ninteger Toolbox for MATLAB [
35]. Specifically, the NID block was used, which is based on the Oustaloup approximation method [
36]. In this study, five poles and five zeros were selected in the implementation, and the frequency interval chosen was
100] [rad/s]. It is important to mention that better approximations can be achieved if the bandwidth is increased (e.g.,
at the expense of increasing the simulation time.
5.1. IO-DMRAC v/s FO-DMRAC Using the Particle Swarm Optimization (PSO)
In this Section, we compare the control results using IO-DMRAC v/s FO-DMRAC, when the controller parameters of both implementations are optimized using the particle swarm optimization (PSO) technique [
22,
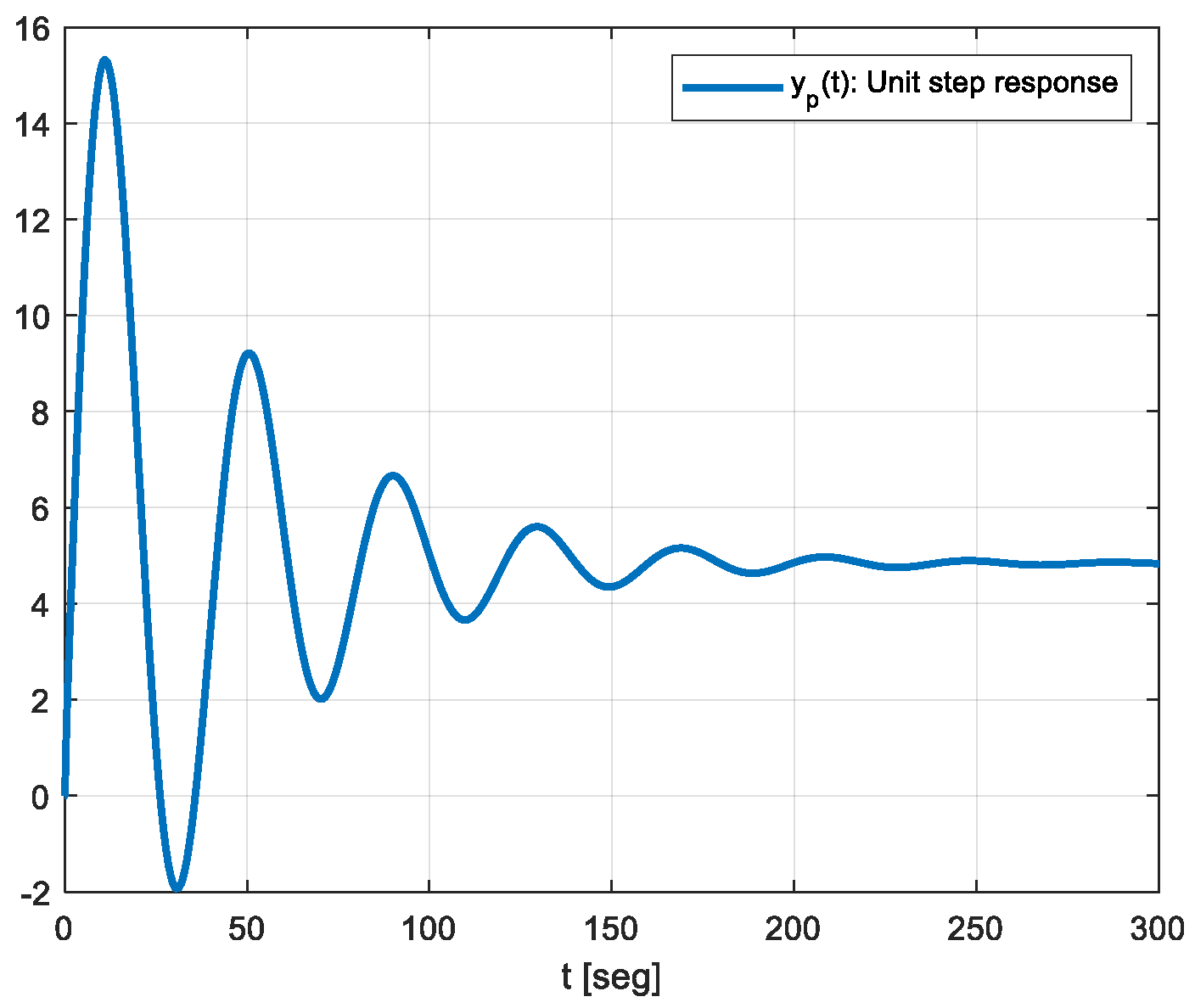
37], using 50 particles and 50 iterations. It should be noted that any other optimization technique could also be used to determine the controller’s parameters, and it is at the discretion of the designer. First, we analyze the open-loop response of the plant to a unit step input and zero initial conditions to observe the behavior of the oscillations during the transient period before reaching the steady-state regime. The result is shown in
Figure 8.
From the open-loop response shown in
Figure 8, we note that the time to reach the steady state regime is almost 300 s, which is considered too long. Therefore, an automatic control system has to be designed to reduce the time of the transient response while tracking the reference accurately.
5.2. Simulation Results Using the Exact Knowledge of
In this section, we analyze the behavior of the controller given in
Figure 6, i.e., assuming that the relative degree of the plant is exactly equal to 2.
The objective function used to optimize the process behavior is defined as
where
is the control steady-state error,
is the rate of change of the input to the plant (or the controller output),
is the control error,
is the output of the controller,
and
are the weighted parameters, and
and
are the standard deviations of the control error and controller output as a time function, respectively. The reference is the unit step.
Remark 2. In this study, a rather general objective function (Equation (22)) was chosen. Nevertheless, any other properly defined objective function could also be used by the designer.
Using the values and equations shown in
Table 4 and considering the weights
,
,
and
, the design parameter values for each case (IO-DMRAC and FO-DMRAC) were obtained and used in the simulations.
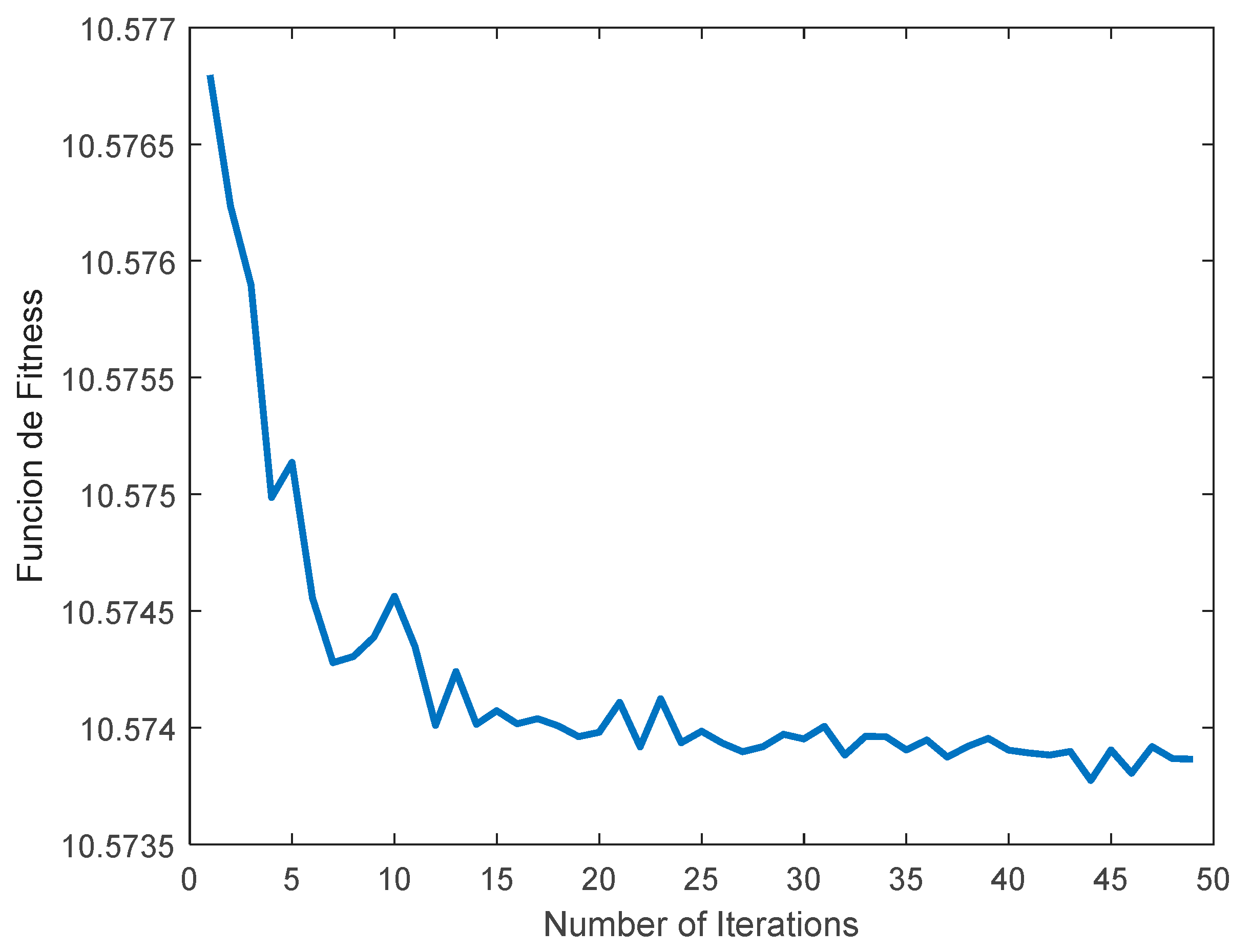
Figure 9 shows the evolution of the fitness function (objective function)
as a function of the number of iterations used in the PSO algorithm.
The optimal parameter values obtained for the case of IO-DMRAC were:
As in the previous case,
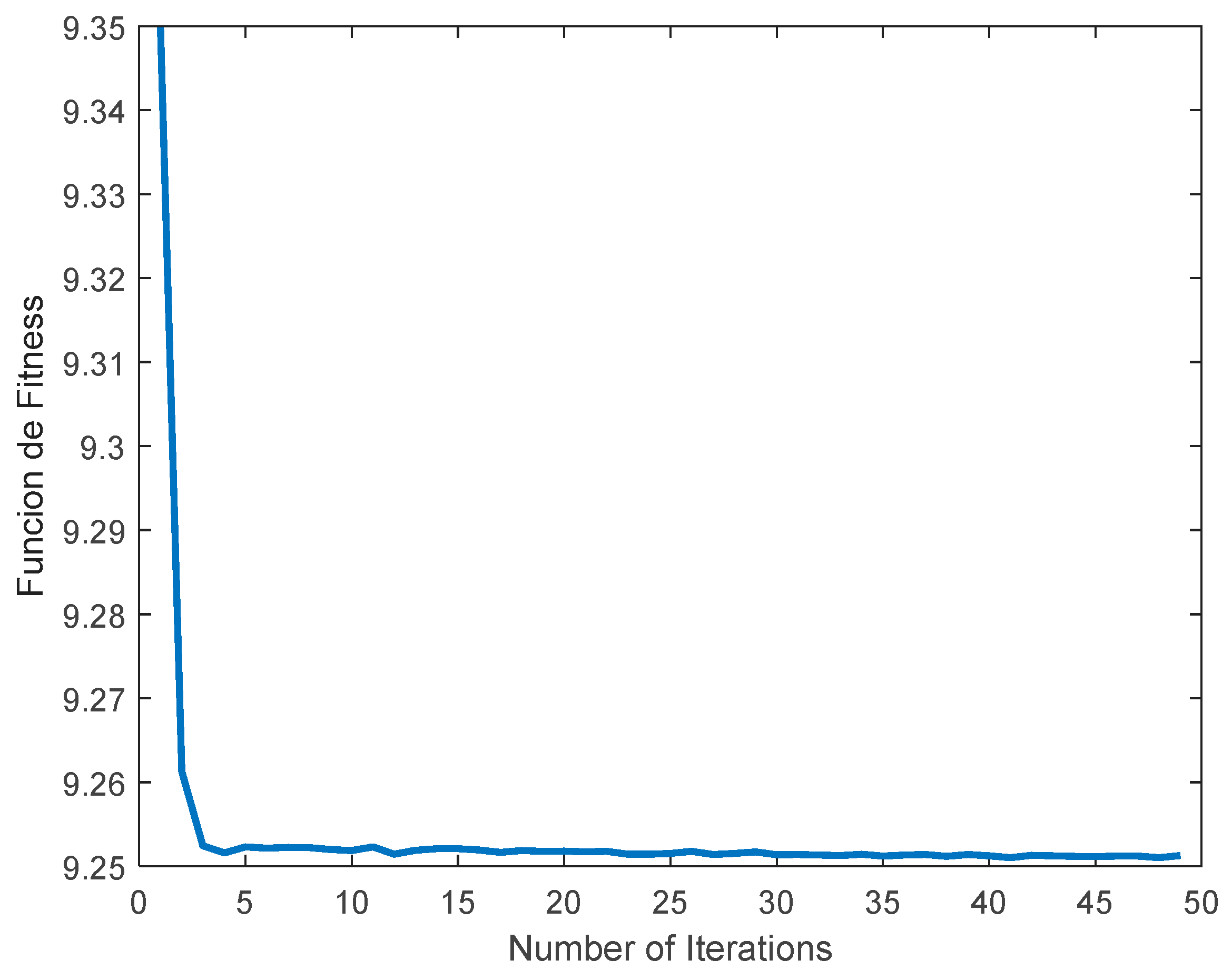
Figure 10 shows the evolution of the objective or fitness function while increasing the number of iterations of the PSO method in the case of the FO-DMRAC.
The best parameter values obtained for the FO-DMRAC case were
From
Figure 9 and
Figure 10, it is interesting to observe a faster rate of convergence to a stable value of the objective function in the FO case (
Figure 10) compared to the integer case (
Figure 9), even though the number of optimization parameters is twice the one used in the IO case. This seems to be an indication that, since in the FO case there are more degrees of freedom in the controller, the behavior attained is better than the one obtained for the IO case.
Figure 11 and
Figure 12 show the responses of both adaptive controllers regarding the tracking of the reference signal (in green). Both responses are similar to FO-DMRAC and IO-DMRAC and approximate the reference very well. Nevertheless, in the case of FO-DMRAC, the response is smoother than in the IO-DMRAC case.
Moreover,
Figure 13 and
Figure 14 show that the control effort in the IO case is greater than that required in the FO case. Particularly, this effort for the IO case is greater in the transient period.
Table 5 shows the optimal values of the cost function
when all controller parameters are varied.
From
Table 5, it can be seen that a better performance is achieved when using FO-DMRAC, since all of the indices are smaller than the IO case. Furthermore, the control effort is smaller in the transient period, as is shown in
Figure 14.
Remember that the weights used in the optimization processes were chosen as , , and .
5.3. Simulation Results Using the Generalized Controller for
In this section, we analyze the problem from a viewpoint different from the one used in
Section 5.1, i.e., using the general implementation of the FO-DMRAC when the relative degree is greater than or equal to 2 (
). The idea is to compare the behavior with the one implemented in
Section 5.1, which, as mentioned, only works for the case when the relative degree is exactly equal to 2 (
).
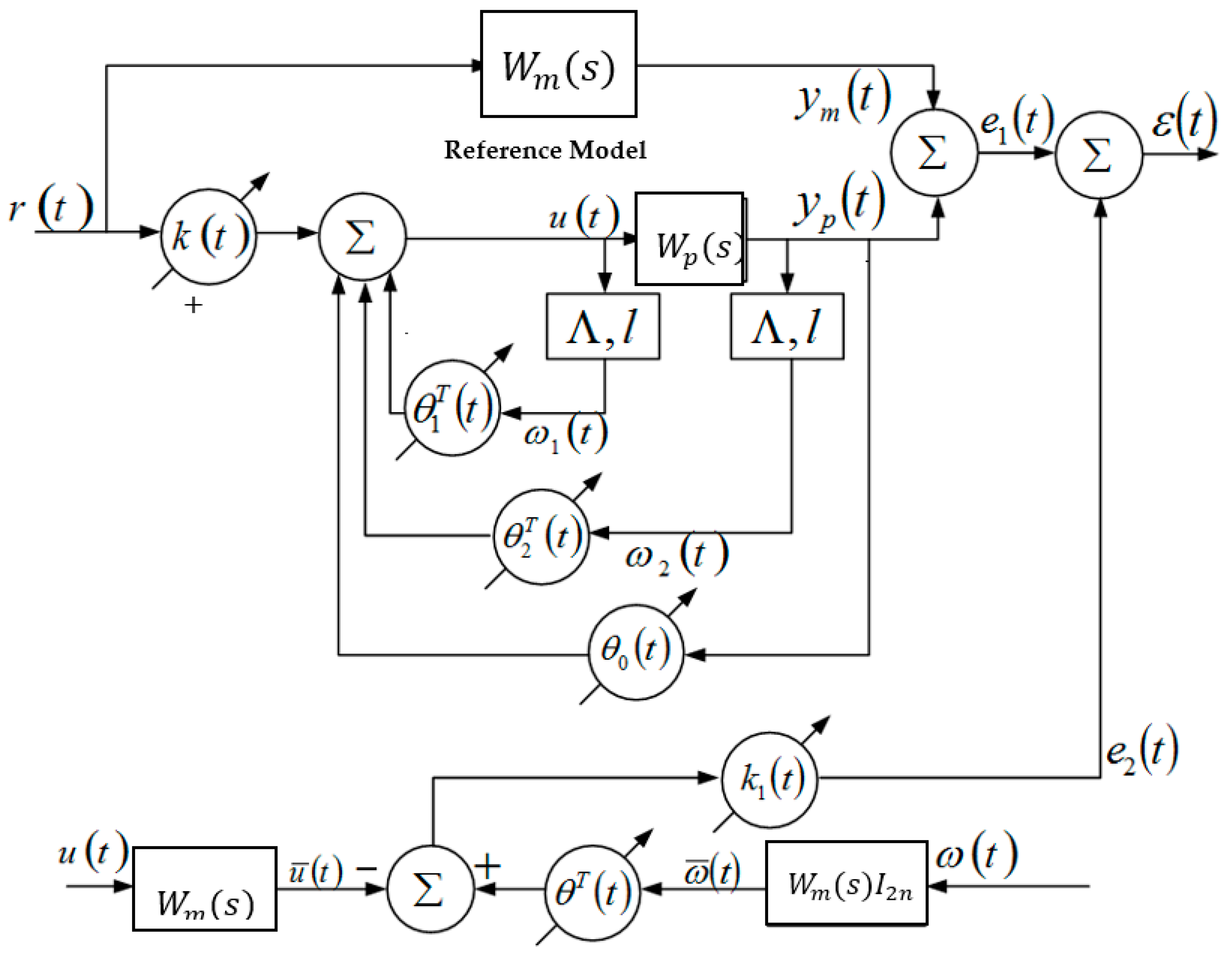
The block diagram of the generalized DMRAC when
is shown in
Figure 15 [
25]. In this case, additional errors must be considered, such as the auxiliary error
and augmented error
, as well as an additional gain
. In this case,
and
are the transfer functions of the reference model and the plant, respectively.
It is important to mention that the structure of
Figure 15 is the same for both the integer and fractional adaptive control cases. The only difference lies in the laws for the adjustment of the parameters (IO derivative in one case and FO derivative in the other one).
Then, to make the analysis comparable (when
and FO-DMRAC) with the generalized adaptive implementation of the integer order DMRAC (or IO-DMRAC), we have determined the values of the γ’s and α’s optimized by PSO. The resulting values are:
Table 6 shows the design parameters for the general case IO-DMRAC when the relative degree of the plant is greater than or equal to 2 (
).
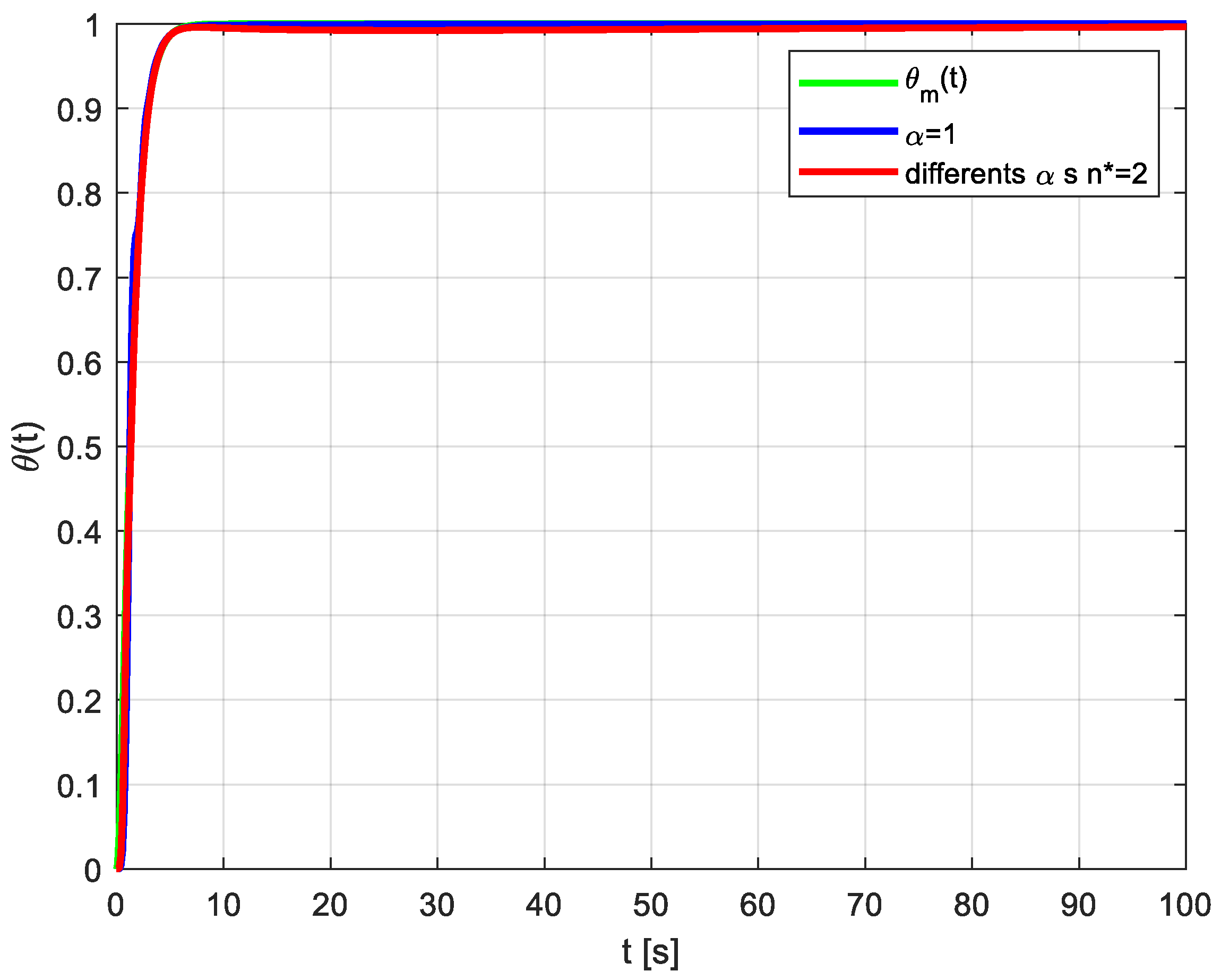
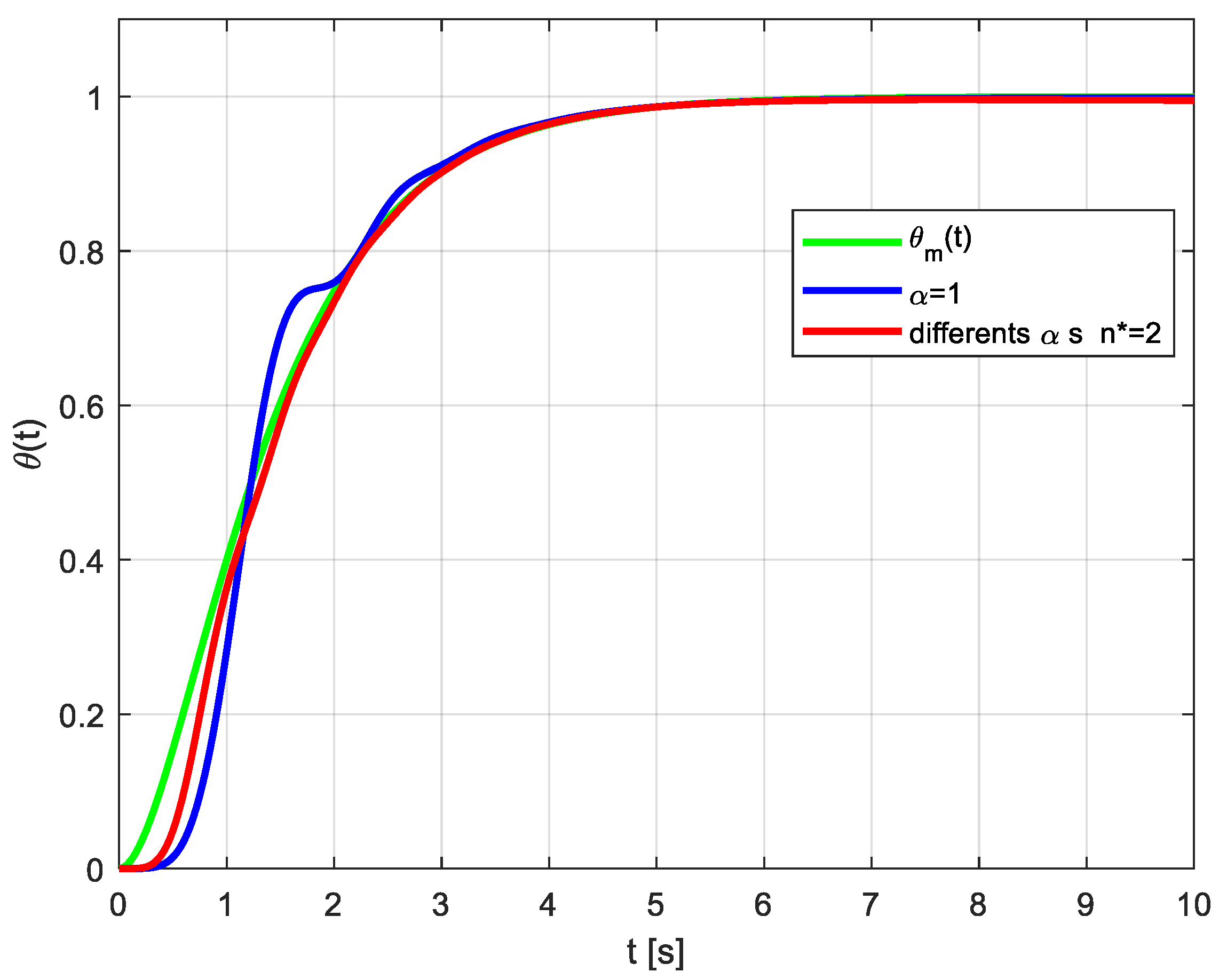
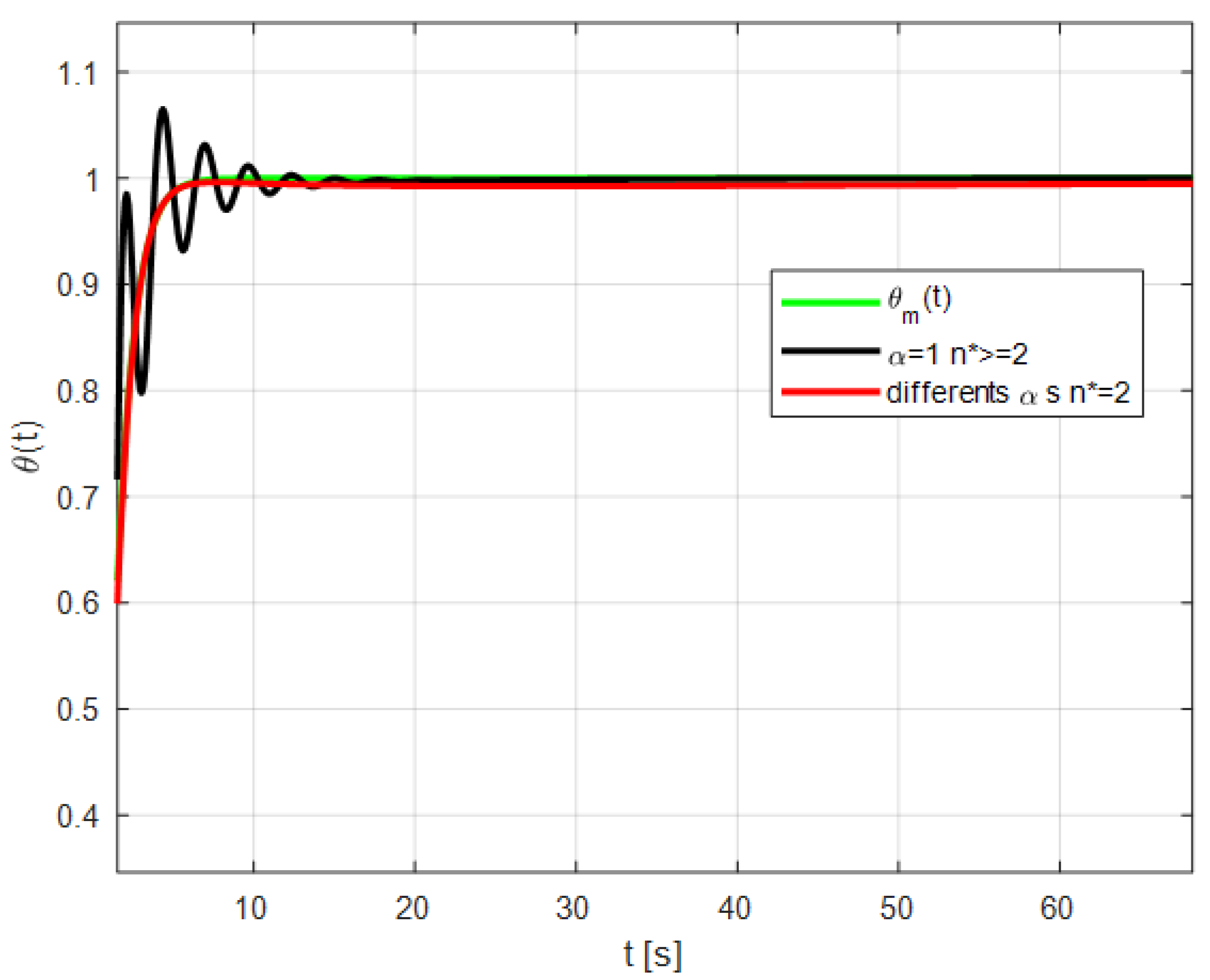
A plot of the pitch angle
for the generalized IO-DMRAC case (
) and FO-DMARC case (
) are shown in
Figure 16 together with the output signal of the reference model
in green.
is the reference signal or the desired evolution of the pitch angle (green color). The signal in black is the plant output when the generalized IO-DMRAC implementation is used (i.e., ), and finally in red, the plant output is shown when FO-DMRAC is considered using the simple structure ()
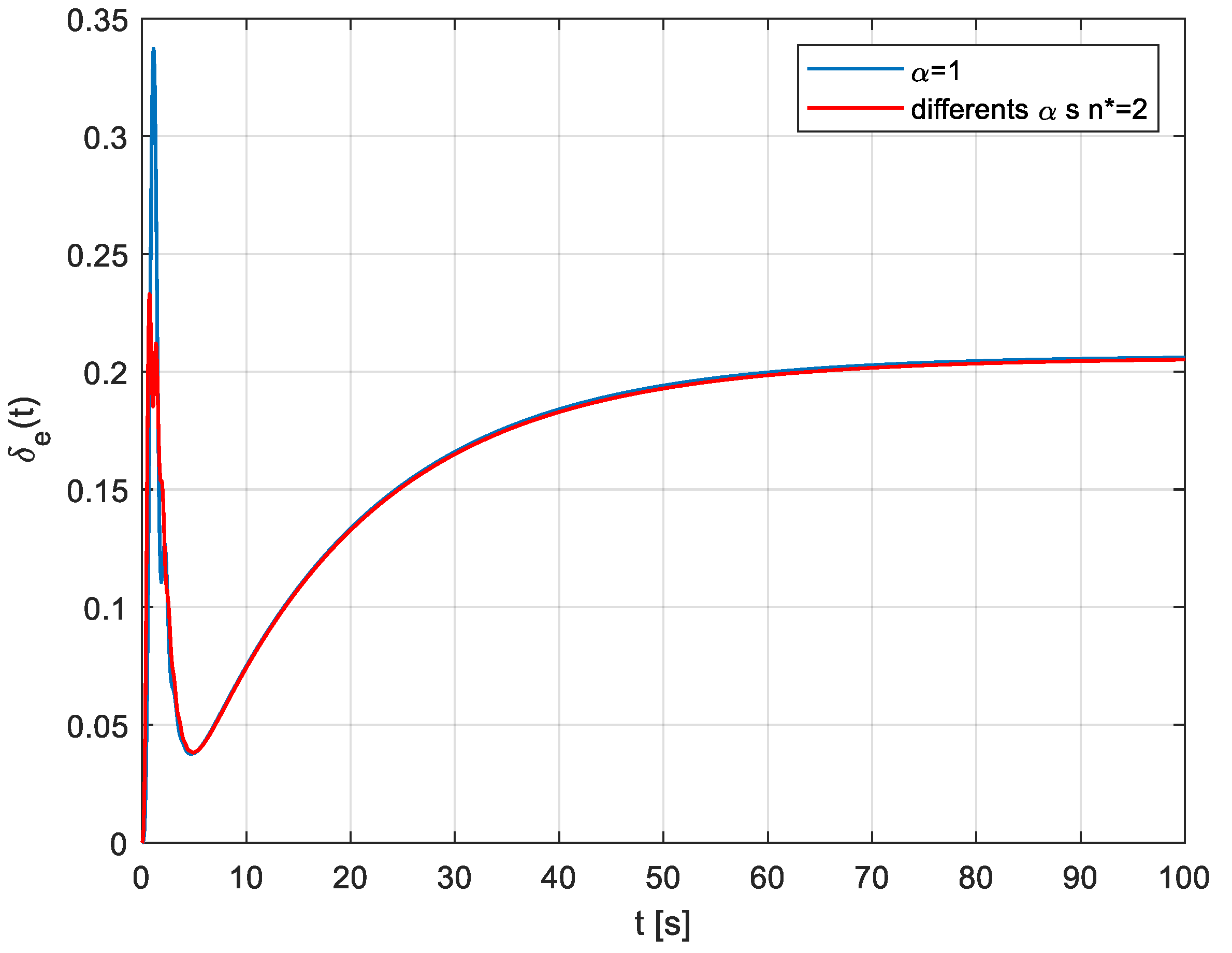
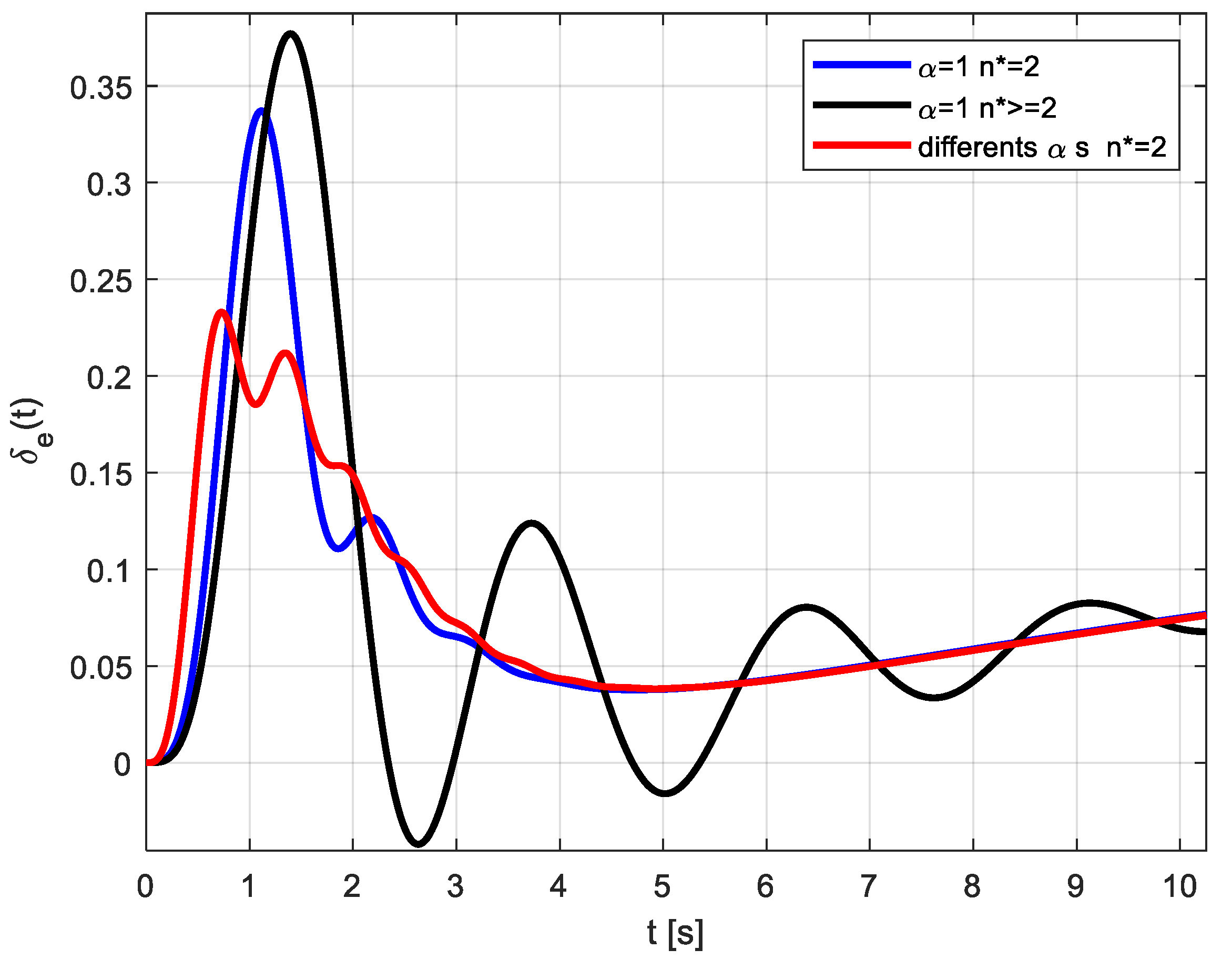
Without being exhaustive, it can be seen from
Figure 16 and
Figure 17 that the best response and least control effort is achieved with the FO-DMRAC for
. Furthermore, the generalized IO-DMRAC case presents oscillations in the transient period, something that does not occur in the cases of the IO and FO controls when
.
It is important to point out that the generalized case corresponds to the structure shown in
Figure 15 (i.e.,
. Furthermore, as discussed in the previous paragraph, the results for the generalized IO-DMRAC-PSO case are supported by the results shown in
Table 7, where the best result is achieved with the FO-DMRAC with a relative degree exactly equal to 2 (
), and with text highlighted in blue.
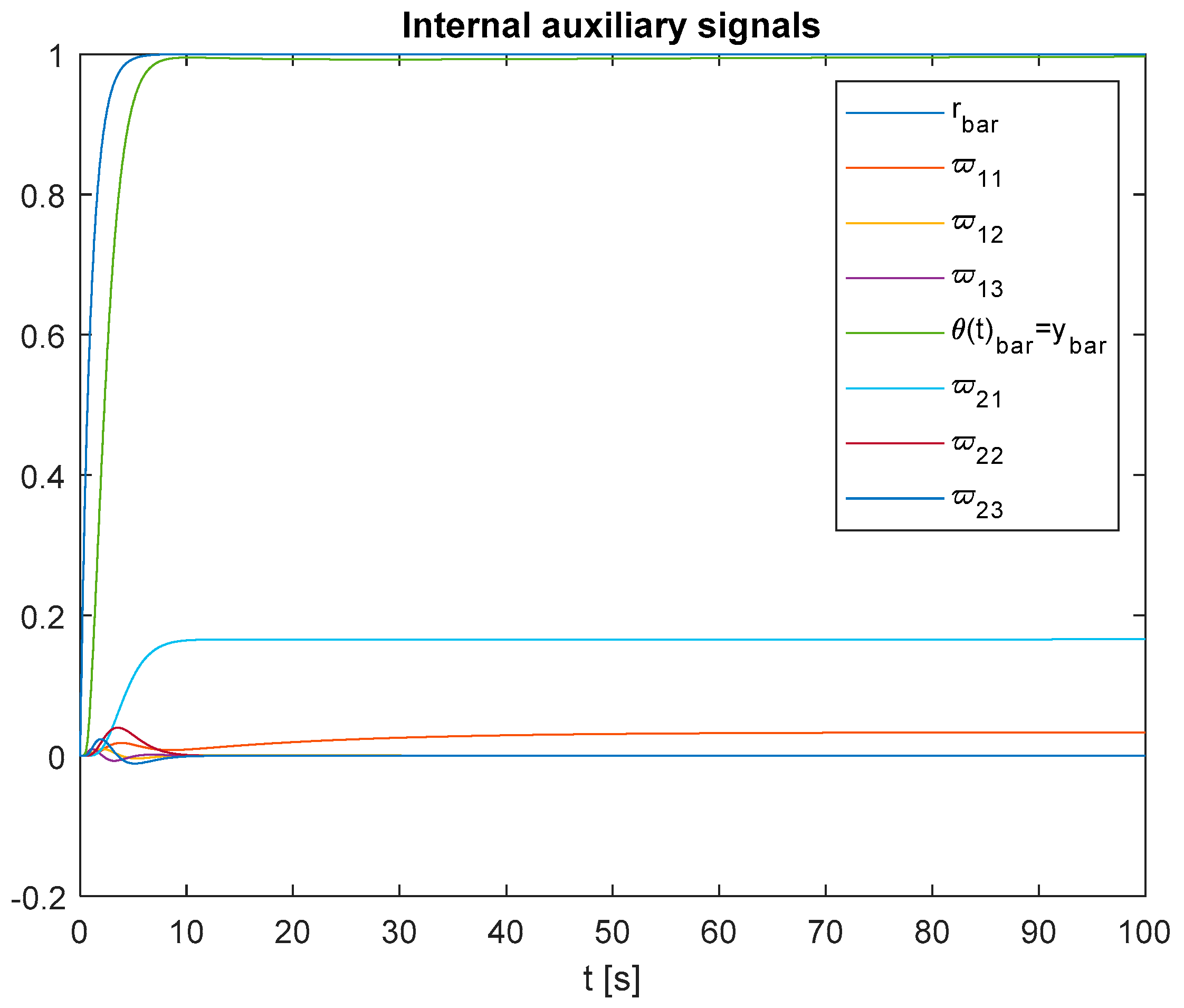
Finally,
Figure 18 shows the boundedness of all auxiliary signals
of the FO-DMRAC when
. This is also true for the case when
is in the state of Lemma 3.
6. Conclusions
In this paper, we have analyzed and compared two types of adaptive controllers of the direct type that were applied to an integer order plant using integer and fractional order adjustment laws, namely, the classic or integer DMRAC (IO-DMRAC) and the FO-DMRAC. The simulation results allow us to verify the boundedness of all of the signals in the FO case, as assured by using Lemma 3. Moreover, through simulations, it was possible to show the advantages of the FO implementation, in particular when the relative degree of the plant is exactly equal to 2 (). It was also possible to prove that the auxiliary signals remain bounded without the need of using hypothesis (ii) of Theorem 1, thus relaxing the stability analysis.
It is promising to say that, when possible, it is useful to decrease the relative degree of the plant to 2, since the performance is better than in the cases of larger relative degrees, in which case one is obliged to use the generalized scheme () that is more complex to implement due to errors and auxiliary blocks. In addition, the fact that the output signal to be controlled is subject to oscillations and overshoots in the transient period, this phenomenon does not occur when case of is considered. Finally, it is important to note, as said before, this is the first time that an FOAC is used in the longitudinal control of an airplane using fractional-order adaptive laws applied to an integer-order system (airplane model) without changing the classic structure of MRAC. Finally, the analysis of asymptotic stability is a subject still pending for future research work in the field of fractional-order MRAC control systems.



 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}