


Smooth and Efficient Path Planning for Car-like Mobile Robot Using Improved Ant Colony Optimization in Narrow and Large-Size Scenes

Abstract
:1. Introduction
- (1)
- To enhance the accuracy of kinematic model construction for CLMRs equipped with suspension systems, an innovative fractional-order-based kinematic modelling method is proposed. This method takes into account the dynamic adjustment of angle constraints to address the issue caused by the time-varying position of the steering wheel’s virtual center due to suspension changes. By considering these constraints, the proposed method improves the kinematic capabilities of CLMRs, especially in limit steering states, which lays a solid foundation for subsequent efficient and smooth path planning.
- (2)
- To address the issue of unsmooth and inefficient planning paths in narrow and large-scale scenes, an improved Ant Colony Optimization (ACO) based path planning method that incorporates fractional-order models is presented, which overcomes the limitations of traditional approaches by establishing a global multifactorial heuristic function, utilizing dynamic angle constraints in fractional-order-based kinematic modelling, incorporating adaptive pheromone adjustment rules, and adopting fractional-order descriptive state-transfer models. These enhancements enable the algorithm to quickly acquire smooth paths and mitigate the problem of the algorithm getting trapped in local optima in narrow spaces, ultimately enhancing the searching speed and success rate of the algorithm in large-scale scenes.
- (3)
- Several experiments are conducted in narrow and large-size sceneries, and the effectiveness of the proposed path planning method is proved by comparison with advanced path planning methods.
2. System Modelling and Problem Formulation
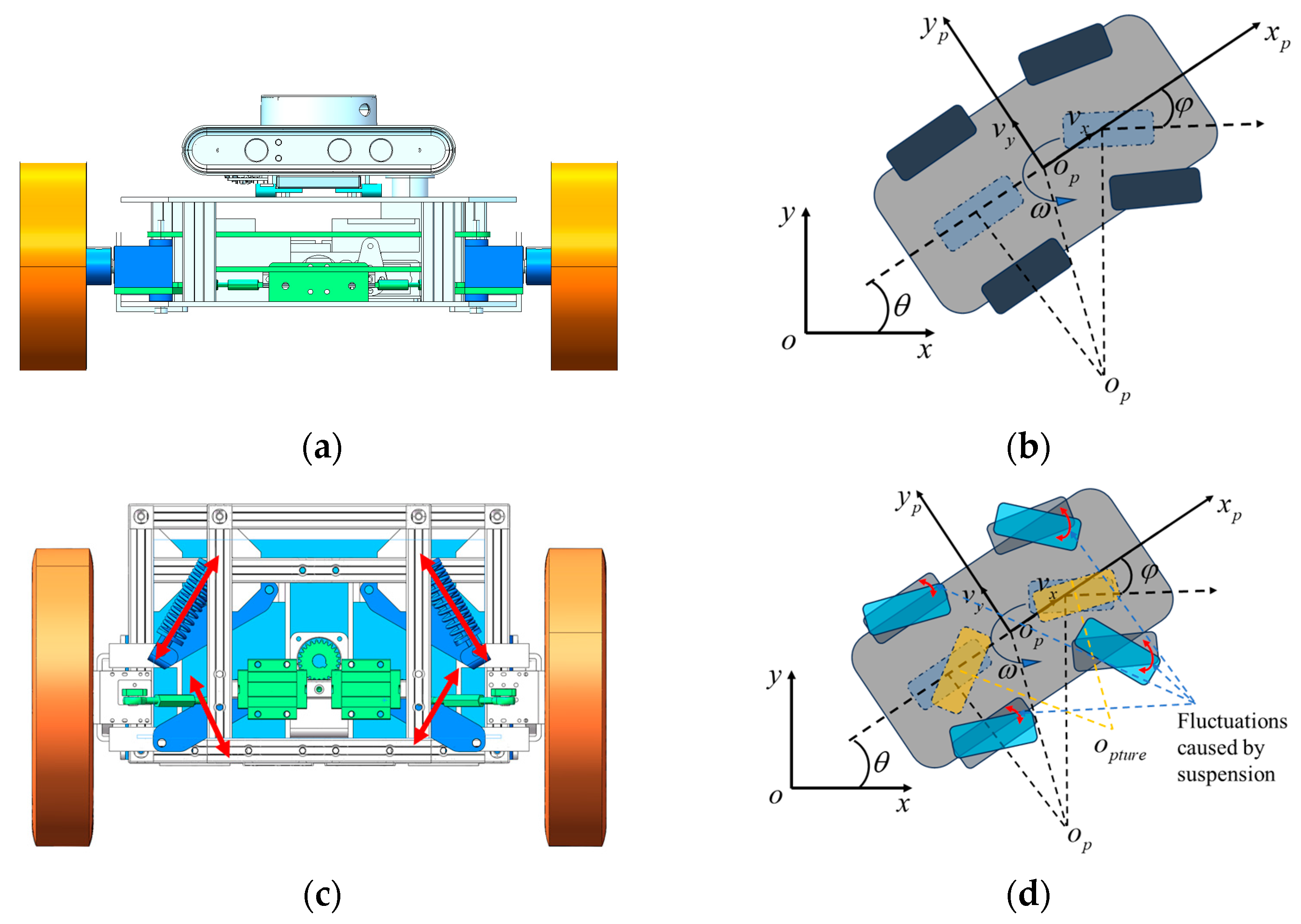
2.1. System Modelling
2.2. Fractional-Order Modelling
3. Accurate Fractional-Order-Based Kinematic Modeling of CLMR
4. Improved ACO Based Path Planning Using Fractional-Order Model
| Algorithm 1 The pseudocode of the improved ACO. | |
| 1 | /*Initialization*/ |
| 2 | Initialize the parameters, including |
| 3 | Calculate initialize pheromone matrix |
| 4 | /*main Loop*/ |
| 5 | While iteration number n does not arrive at the target do: |
| 6 | Place all ants at the start point; |
| 7 | /*inner loop*/ |
| 8 | For k = 1 to K do |
| 9 | Calculate the using Formula (25) and confirm the next node |
| 10 | If Ant k reach the target point do |
| 11 | Goto step 15 |
| 12 | Else |
| 13 | Goto step 9 |
| 14 | End if |
| 15 | Select the optimal ant path for this round according to Equation (15) |
| 16 | End for |
| 17 | Update the by Formulas (23)–(25) |
| 18 | n = n + 1, k = 0 |
| 19 | Select the optimal path Ln |
| 20 | End while |
| 21 | Return final optimal path Lk |
4.1. Factorization of the Cost Function with Fractional-Order Model
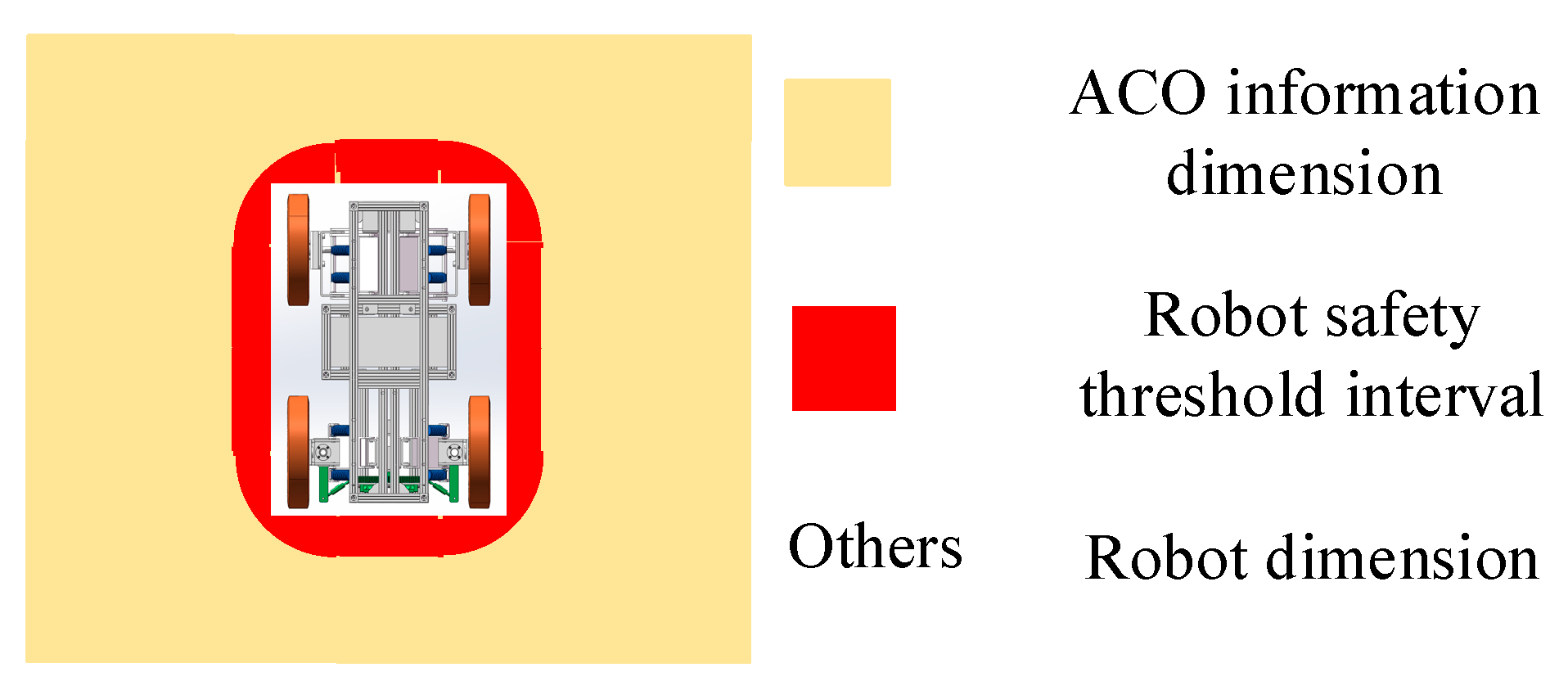
4.1.1. Safety Functions with Local Region Preprocessing
4.1.2. Smoothing Function Based on Dynamic Angle Constraints
4.1.3. Path Functions by Adding Adjusting Factor
4.2. Adaptive Pheromone Update Rules
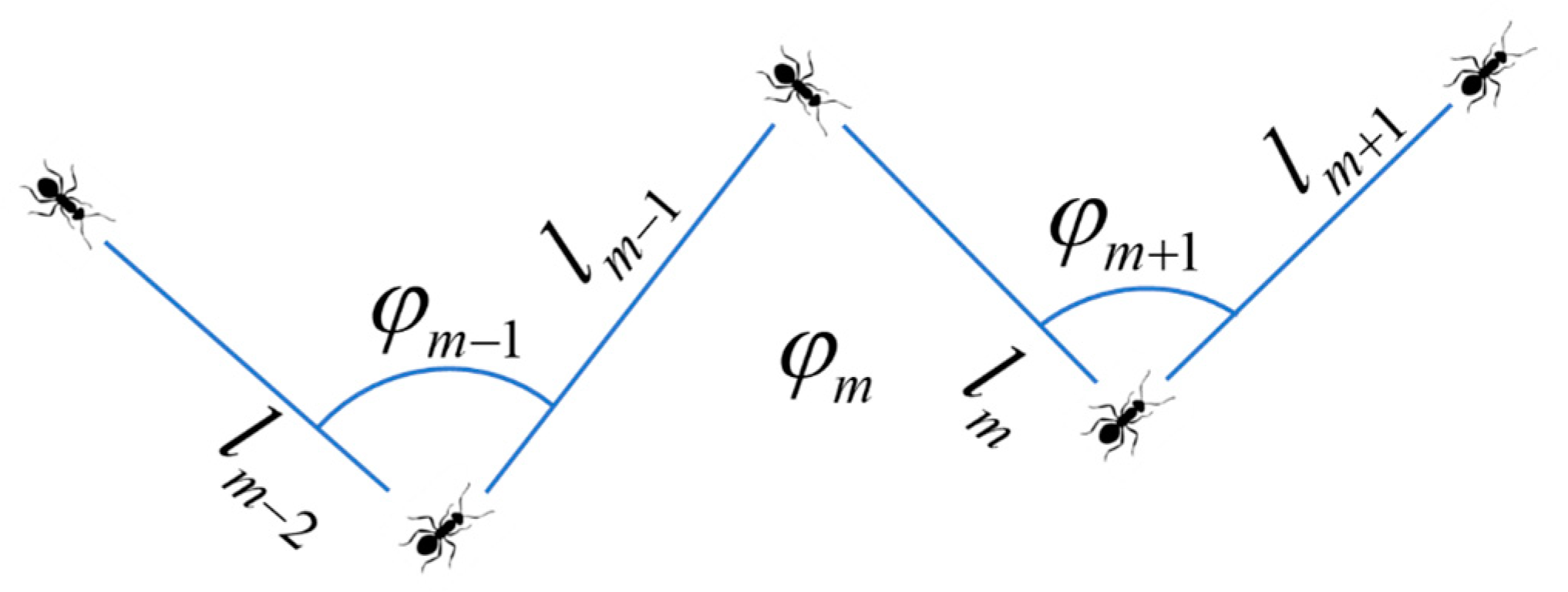
4.3. Fractional-Order Transfer Probability Rules
5. Experimental Validations
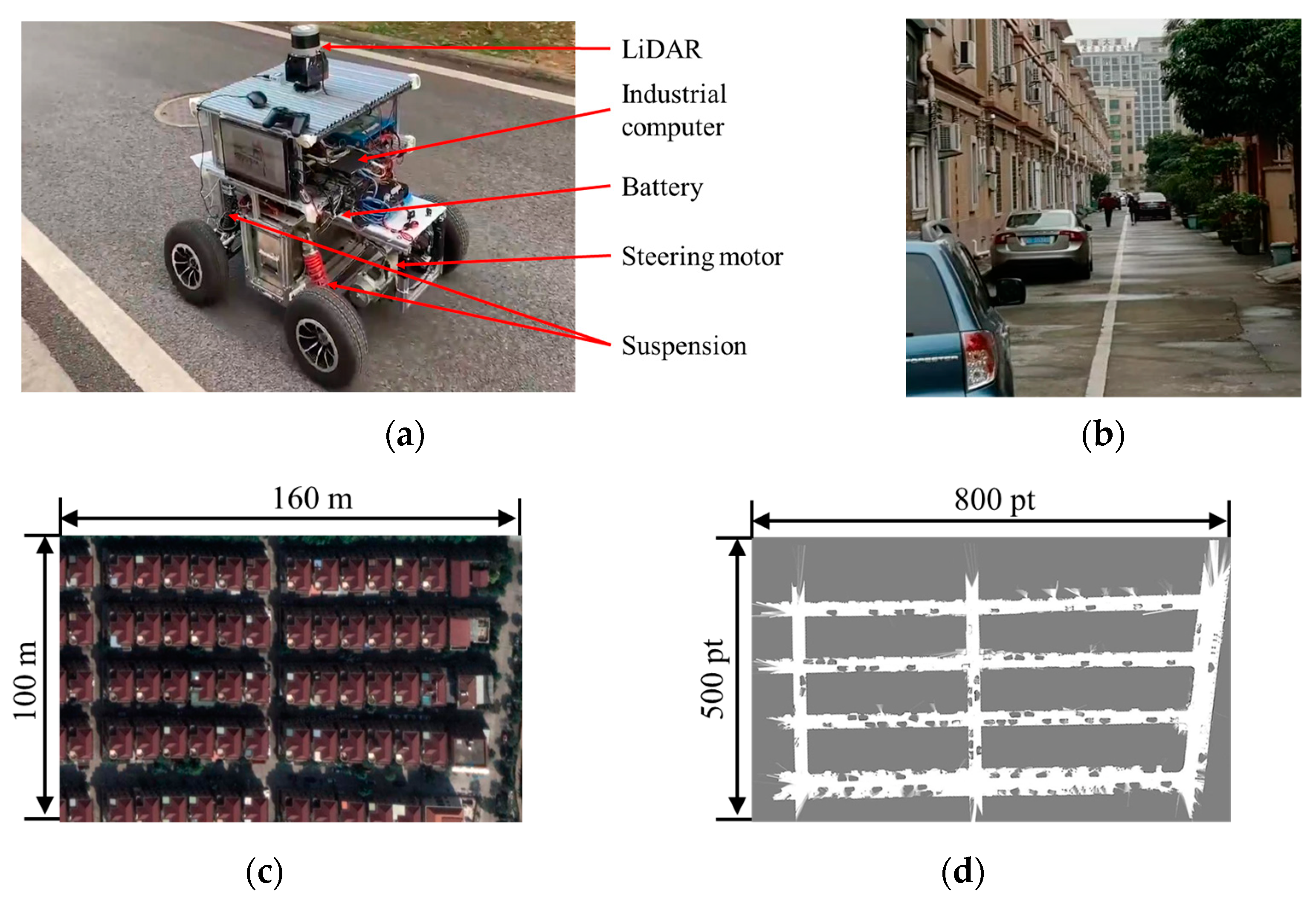
5.1. Experimental Implementation
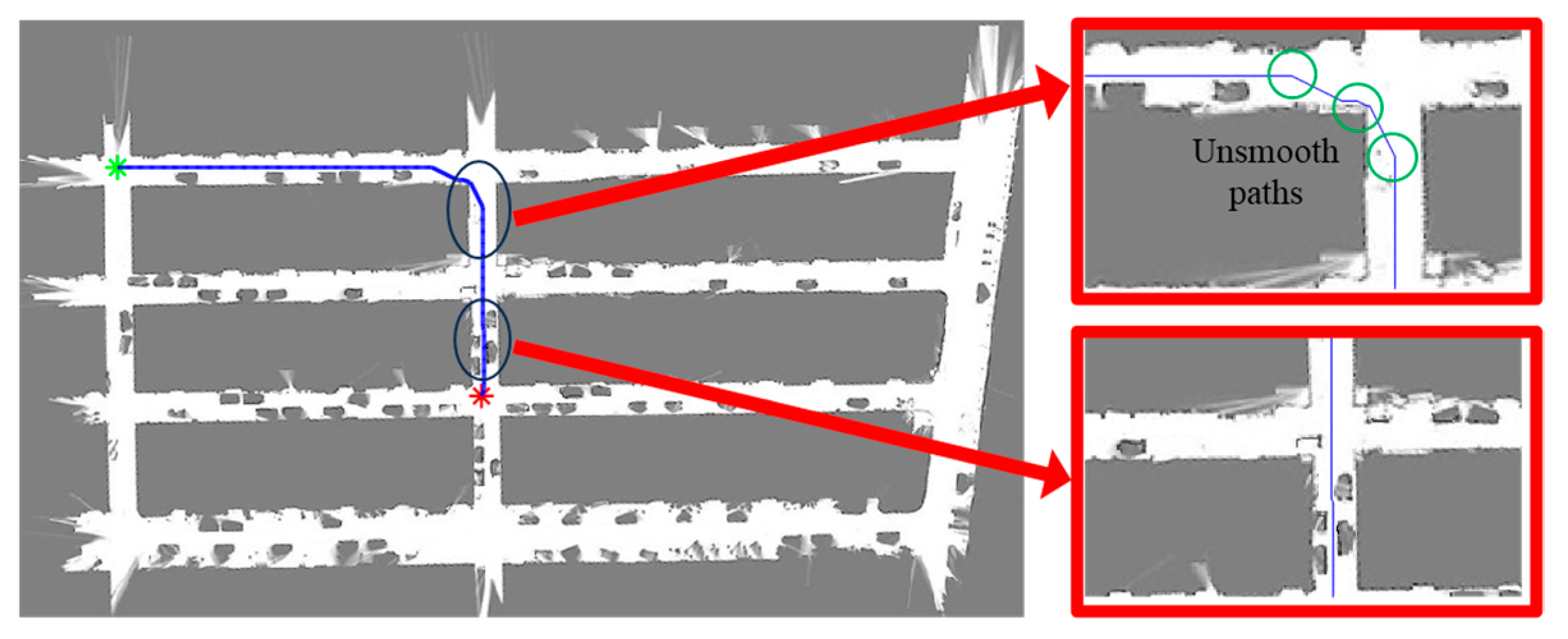
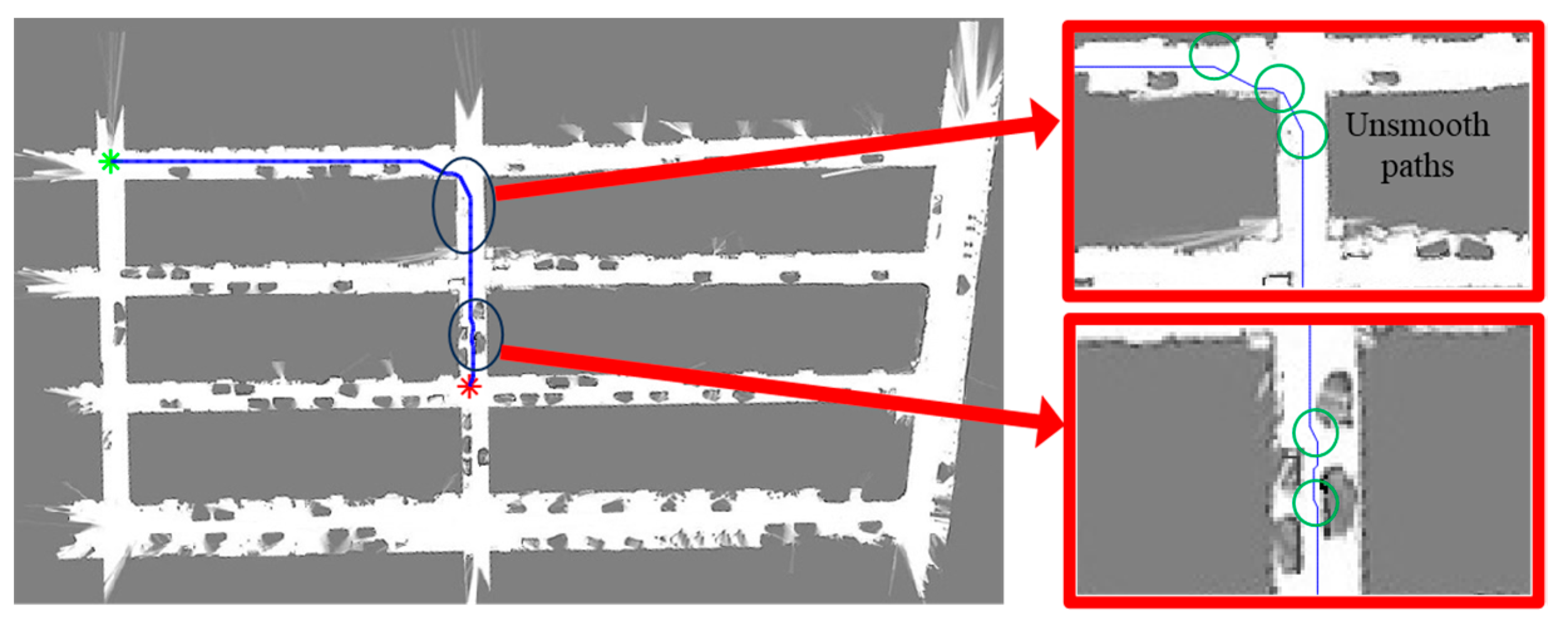
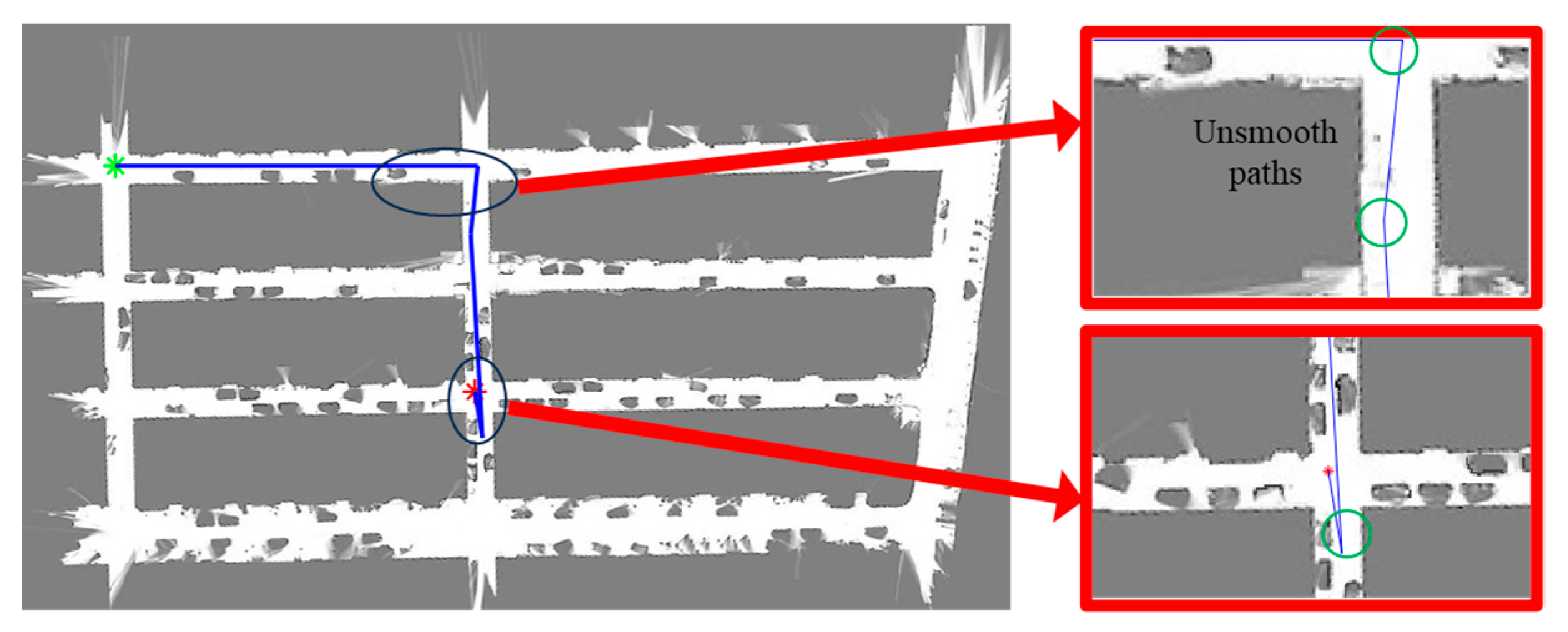
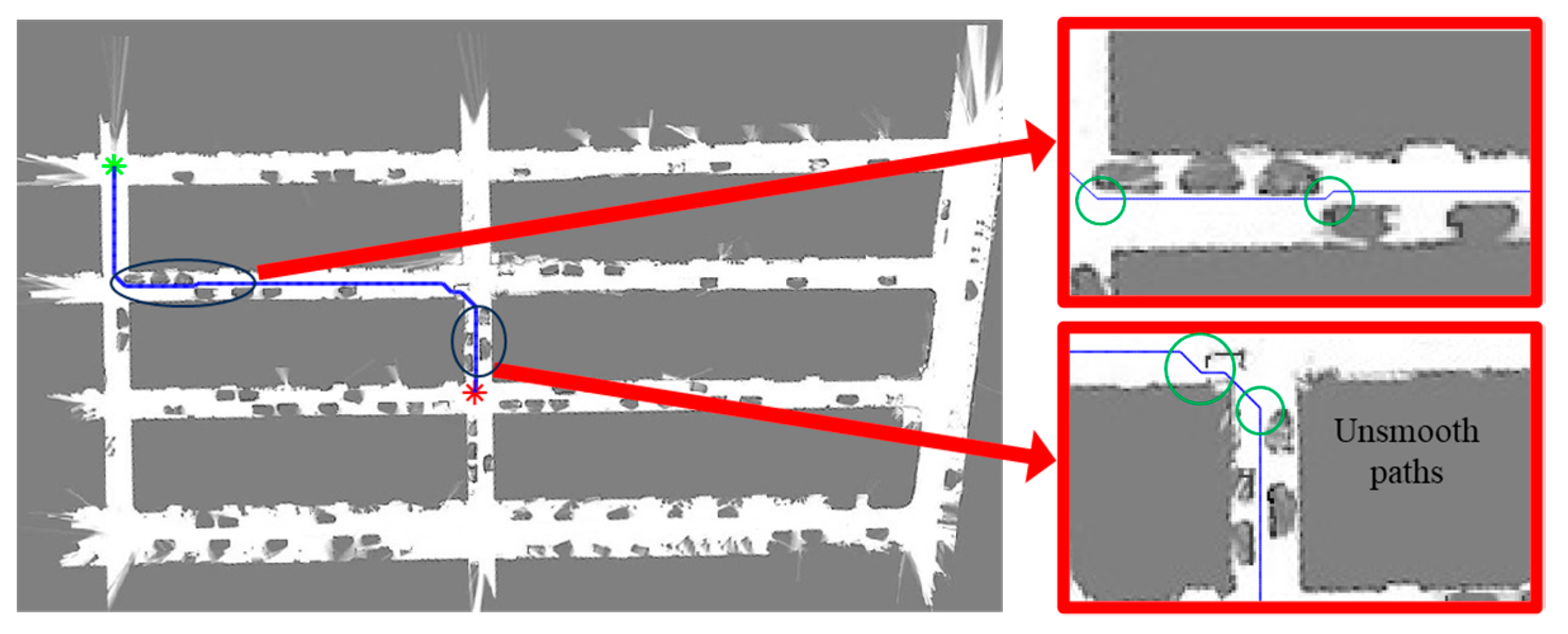
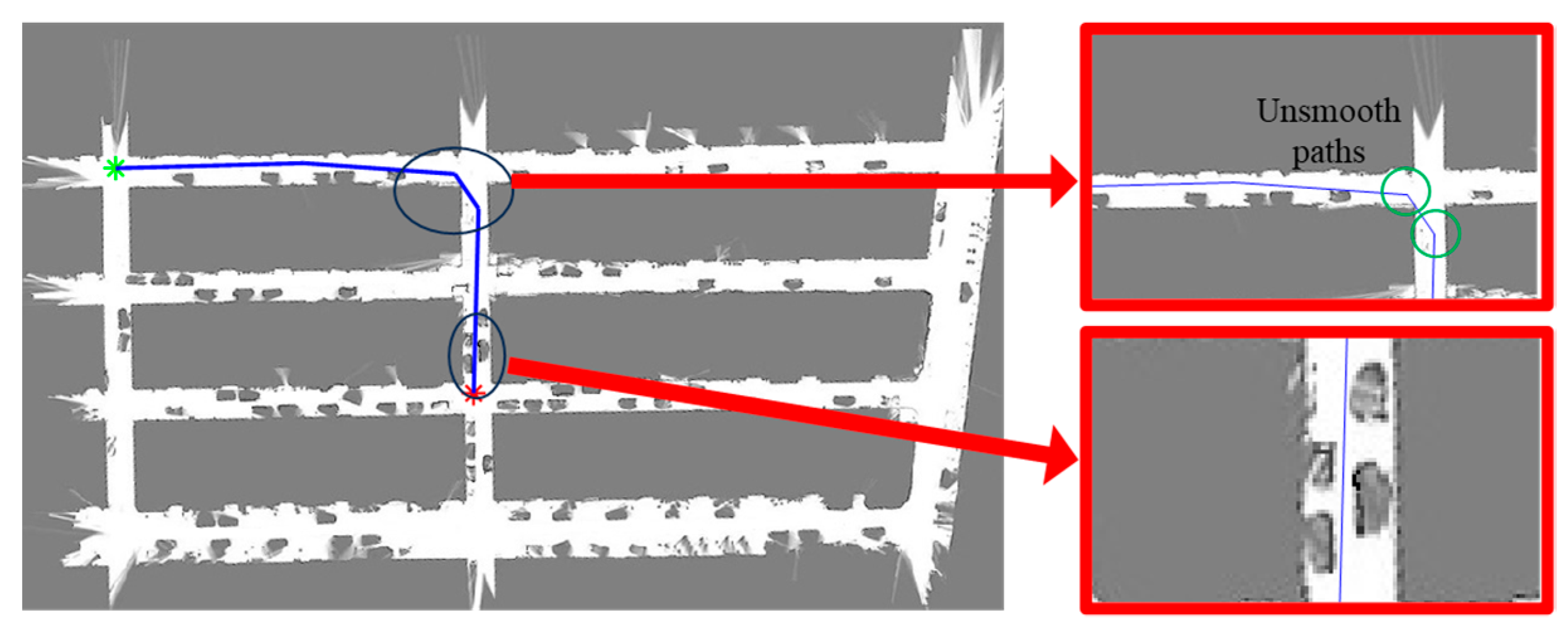
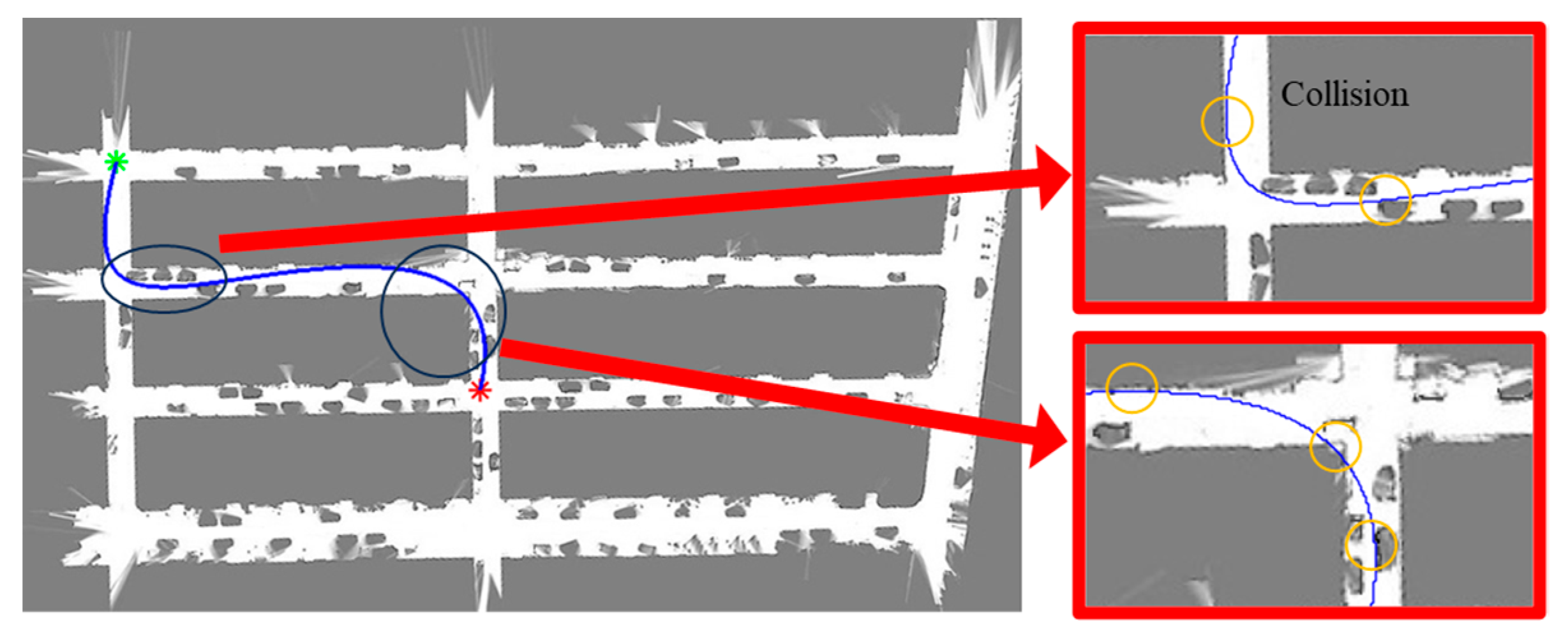
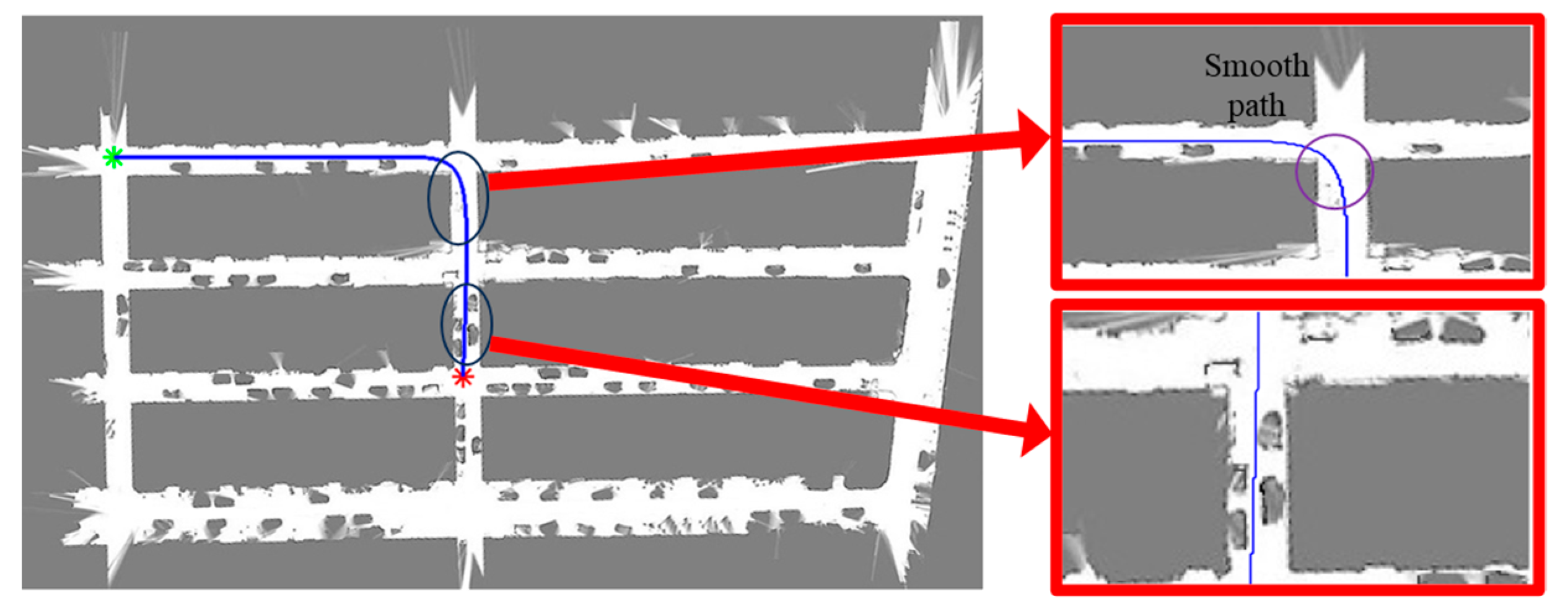
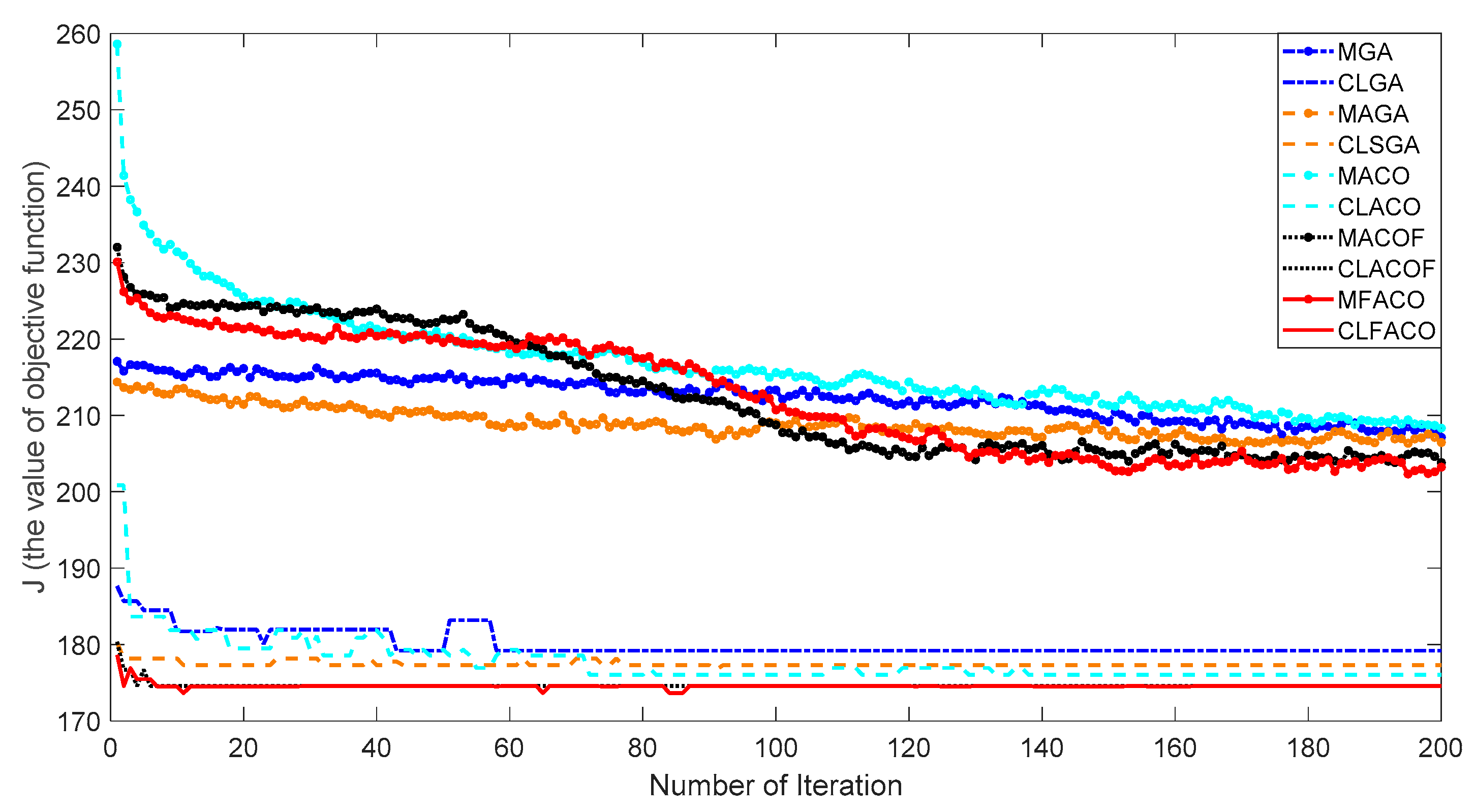
5.2. Experimental Results and Discussions
6. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, L.; Wang, X.; Yang, X.; Liu, H.; Li, J.; Wang, P. Path planning techniques for mobile robots: Review and prospect. Expert Syst. Appl. 2023, 227, 120254. [Google Scholar] [CrossRef]
- Meng, J.; Wang, S.; Xie, Y.; Li, G.; Zhang, X.; Jiang, L.; Liu, C. A safe and efficient LIDAR-based navigation system for 4WS4WD mobile manipulators in manufacturing plants. Meas. Sci. Technol. 2021, 32, 045203. [Google Scholar] [CrossRef]
- Wu, L.; Huang, X.; Cui, J.; Liu, C.; Xiao, W. Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot. Expert Syst. Appl. 2023, 215, 119410. [Google Scholar] [CrossRef]
- Li, G.; Liu, C.; Wu, L.; Xiao, W. A mixing algorithm of ACO and ABC for solving path planning of mobile robot. Appl. Soft. Comput. 2023, 148, 110868. [Google Scholar] [CrossRef]
- Ben-Asher, J.Z.; Rimon, E.D. Time optimal trajectories for a car-like mobile robot. IEEE Trans. Robot. 2021, 38, 421–432. [Google Scholar] [CrossRef]
- Shui, Y.; Zhao, T.; Dian, S.; Hu, Y.; Guo, R.; Li, S. Data-driven generalized predictive control for car-like mobile robots using interval type-2 T-S fuzzy neural network. Asian J. Control 2022, 24, 1391–1405. [Google Scholar] [CrossRef]
- Theunissen, J.; Tota, A.; Gruber, P.; Dhaens, M.; Sorniotti, A. Preview-based techniques for vehicle suspension control: A state-of-the-art review. Annu. Rev. Control 2021, 51, 206–235. [Google Scholar] [CrossRef]
- Meng, J.; Wang, S.; Jiang, L.; Hu, Z.; Xie, Y. Accurate and Efficient Self-localization of AGV Relying on Trusted Area Information in Dynamic Industrial Scene. IEEE Trans. Veh. Technol. 2023, 72, 7148–7159. [Google Scholar] [CrossRef]
- Qie, T.; Wang, W.; Yang, C.; Li, Y.; Liu, W.; Xiang, C. A path planning algorithm for autonomous flying vehicles in cross-country environments with a novel TF-RRT* method. Green Energy Intell. Trans. 2022, 1, 100026. [Google Scholar] [CrossRef]
- Miao, C.; Chen, G.; Yan, C.; Wu, Y. Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm. Comput. Ind. Eng. 2021, 156, 107230. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic approaches in robot path planning: A survey. Robot. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft. Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Nassef, A.M.; Abdelkareem, M.A.; Maghrabie, H.M.; Baroutaji, A. Metaheuristic-Based Algorithms for Optimizing Fractional-Order Controllers—A Recent, Systematic, and Comprehensive Review. Fractal Fract. 2023, 7, 553. [Google Scholar] [CrossRef]
- Jiang, L.; Wang, S.; Xie, Y.; Xie, S.; Zheng, S.; Meng, J.; Ding, H. Decoupled fractional supertwisting stabilization of interconnected mobile robot under harsh terrain conditions. IEEE Trans. Ind. Electron. 2021, 69, 8178–8189. [Google Scholar] [CrossRef]
- Jiang, L.; Wang, S.; Xie, Y.; Xie, S.Q.; Zheng, S.; Meng, J. Fractional robust finite time control of four-wheel-steering mobile robots subject to serious time-varying perturbations. Mech. Mach. Theory 2022, 169, 104634. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, X.; Meng, W.; Zheng, S.; Jiang, L.; Meng, J.; Wang, S. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot. ISA Trans. 2021, 108, 282–294. [Google Scholar] [CrossRef] [PubMed]
- Patnaik, S.; Hollkamp, J.P.; Semperlotti, F. Applications of variable-order fractional operators: A review. Proc. R. Soc. London Ser. A-Math. Phys. Eng. Sci. 2020, 476, 20190498. [Google Scholar] [CrossRef]
- Zhao, C.; Dai, L.; Huang, Y. Fractional-order Sequential Minimal Optimization Classification Method. Fractal Fract. 2023, 7, 637. [Google Scholar] [CrossRef]
- Muresan, C.I.; Birs, I.; Ionescu, C.; Dulf, E.H.; De Keyser, R. A review of recent developments in autotuning methods for fractional-order controllers. Fractal Fract. 2022, 6, 37. [Google Scholar] [CrossRef]
- Tzafestas, S.G. Mobile robot control and navigation: A global overview. J. Intell. Robot. Syst. 2018, 91, 35–58. [Google Scholar] [CrossRef]
- Jiang, H.; Xu, G.; Zeng, W.; Gao, F. Design and kinematic modeling of a passively-actively transformable mobile robot. Mech. Mach. Theory 2019, 142, 103591. [Google Scholar] [CrossRef]
- Mohammadpour, M.; Kelouwani, S.; Gaudreau, M.A.; Zeghmi, L.; Amamou, A.; Bahmanabadi, H.; Graba, M. Energy-efficient motion planning of an autonomous forklift using deep neural networks and kinetic model. Expert Syst. Appl. 2024, 237, 121623. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Zou, L.; Xu, L.; Alsaadi, F.E. A new approach to smooth global path planning of mobile robots with kinematic constraints. Int. J. Mach. Learn. Cybern. 2019, 10, 107–119. [Google Scholar] [CrossRef]
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419839596. [Google Scholar] [CrossRef]
- Niu, C.; Li, A.; Huang, X.; Li, W.; Xu, C. Research on Global Dynamic Path Planning Method Based on Improved A* Algorithm. Math. Probl. Eng. 2021, 2021, 1–13. [Google Scholar] [CrossRef]
- Wang, J.; Chi, W.; Li, C.; Wang, C.; Meng, M.Q.H. Neural RRT*: Learning-based optimal path planning. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Lyridis, D.V. An improved ant colony optimization algorithm for unmanned surface vehicle local path planning with multi-modality constraints. Ocean Eng. 2021, 241, 109890. [Google Scholar] [CrossRef]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, J.; Chen, Z.; Xiong, G.; Liu, S. A robot path planning method based on improved genetic algorithm and improved dynamic window approach. Sustainability 2023, 15, 4656. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Khedr, A.M.; Al Aghbari, Z.; Khalifa, B.E. Fuzzy-based multi-layered clustering and ACO-based multiple mobile sinks path planning for optimal coverage in WSNs. IEEE Sens. J. 2022, 22, 7277–7287. [Google Scholar] [CrossRef]
- Liu, C.; Wu, L.; Xiao, W.; Li, G.; Xu, D.; Guo, J.; Li, W. An improved heuristic mechanism ant colony optimization algorithm for solving path planning. Knowl. Based Syst. 2023, 271, 110540. [Google Scholar] [CrossRef]
- Ajeil, F.H.; Ibraheem, I.K.; Azar, A.T.; Humaidi, A.J. Grid-based mobile robot path planning using aging-based ant colony optimization algorithm in static and dynamic environments. Sensors 2020, 20, 1880. [Google Scholar] [CrossRef] [PubMed]
- Ali, H.; Gong, D.; Wang, M.; Dai, X. Path planning of mobile robot with improved ant colony algorithm and MDP to produce smooth trajectory in grid-based environment. Front. Neurorobotics 2020, 14, 44. [Google Scholar] [CrossRef] [PubMed]
- Feng, K.; He, X.; Wang, M.; Chu, X.; Wang, D.; Yue, D. Path Optimization of Agricultural Robot Based on Immune Ant Colony: B-Spline Interpolation Algorithm. Math. Probl. Eng. 2022, 2022, 2585910. [Google Scholar] [CrossRef]
- Zhang, X.; Xie, Y.; Jiang, L.; Li, G.; Meng, J.; Huang, Y. Fault-tolerant dynamic control of a four-wheel redundantly-actuated mobile robot. IEEE Access 2019, 7, 157909–157921. [Google Scholar] [CrossRef]
- Kiran, M.S.; Hakli, H.; Gunduz, M.; Uguz, H. Artificial bee colony algorithm with variable search strategy for continuous optimization. Inf. Sci. 2015, 300, 140–157. [Google Scholar] [CrossRef]
- Abdulakareem, M.; Raheem, F.A. Development of path planning algorithm using probabilistic roadmap based on ant colony optimization. Engin. Techn. J. 2020, 38, 343–351. [Google Scholar] [CrossRef]
- Gao, W.; Tang, Q.; Ye, B.; Yang, Y.; Yao, J. An enhanced heuristic ant colony optimization for mobile robot path planning. Soft Comput. 2020, 24, 6139–6150. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Path Length (m) | Times (s) | Success Rate (%) |
|---|---|---|---|
| A* | 91.60 | 857.26 | 100 |
| IA | 93.57 | 591.73 | 100 |
| GA | 101.24 | 100.61 | 100 |
| AGA | 93.36 | 123.67 | 100 |
| ACO | 89.20 | 350.66 | 100 |
| ACOF | 94.97 | 153.71 | 0 |
| FACO | 92.98 | 63.74 | 100 |
| Methods | 0–5° | 5–10° | >10° |
|---|---|---|---|
| A* | 98.39% | 1.15% | 0.46% |
| IA | 96.77% | 2.30% | 0.93% |
| GA | 0 | 33.33% | 66.67% |
| AGA | 0 | 0 | 100% |
| ACO | 33.33% | 0 | 66.67% |
| ACOF | 100% | 0 | 0 |
| FACO | 99.4% | 0.6% | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Jiang, L.; Tu, W.; Jiang, L.; He, R. Smooth and Efficient Path Planning for Car-like Mobile Robot Using Improved Ant Colony Optimization in Narrow and Large-Size Scenes. Fractal Fract. 2024, 8, 157. https://doi.org/10.3390/fractalfract8030157
Li L, Jiang L, Tu W, Jiang L, He R. Smooth and Efficient Path Planning for Car-like Mobile Robot Using Improved Ant Colony Optimization in Narrow and Large-Size Scenes. Fractal and Fractional. 2024; 8(3):157. https://doi.org/10.3390/fractalfract8030157
Chicago/Turabian StyleLi, Likun, Liyu Jiang, Wenzhang Tu, Liquan Jiang, and Ruhan He. 2024. "Smooth and Efficient Path Planning for Car-like Mobile Robot Using Improved Ant Colony Optimization in Narrow and Large-Size Scenes" Fractal and Fractional 8, no. 3: 157. https://doi.org/10.3390/fractalfract8030157
APA StyleLi, L., Jiang, L., Tu, W., Jiang, L., & He, R. (2024). Smooth and Efficient Path Planning for Car-like Mobile Robot Using Improved Ant Colony Optimization in Narrow and Large-Size Scenes. Fractal and Fractional, 8(3), 157. https://doi.org/10.3390/fractalfract8030157