

Fractional Calculus to Analyze Efficiency Behavior in a Balancing Loop in a System Dynamics Environment


Abstract
:1. Introduction
2. Materials and Methods
2.1. Gamma Function
2.2. Mittag-Leffler Function
2.3. Caputo Derivative
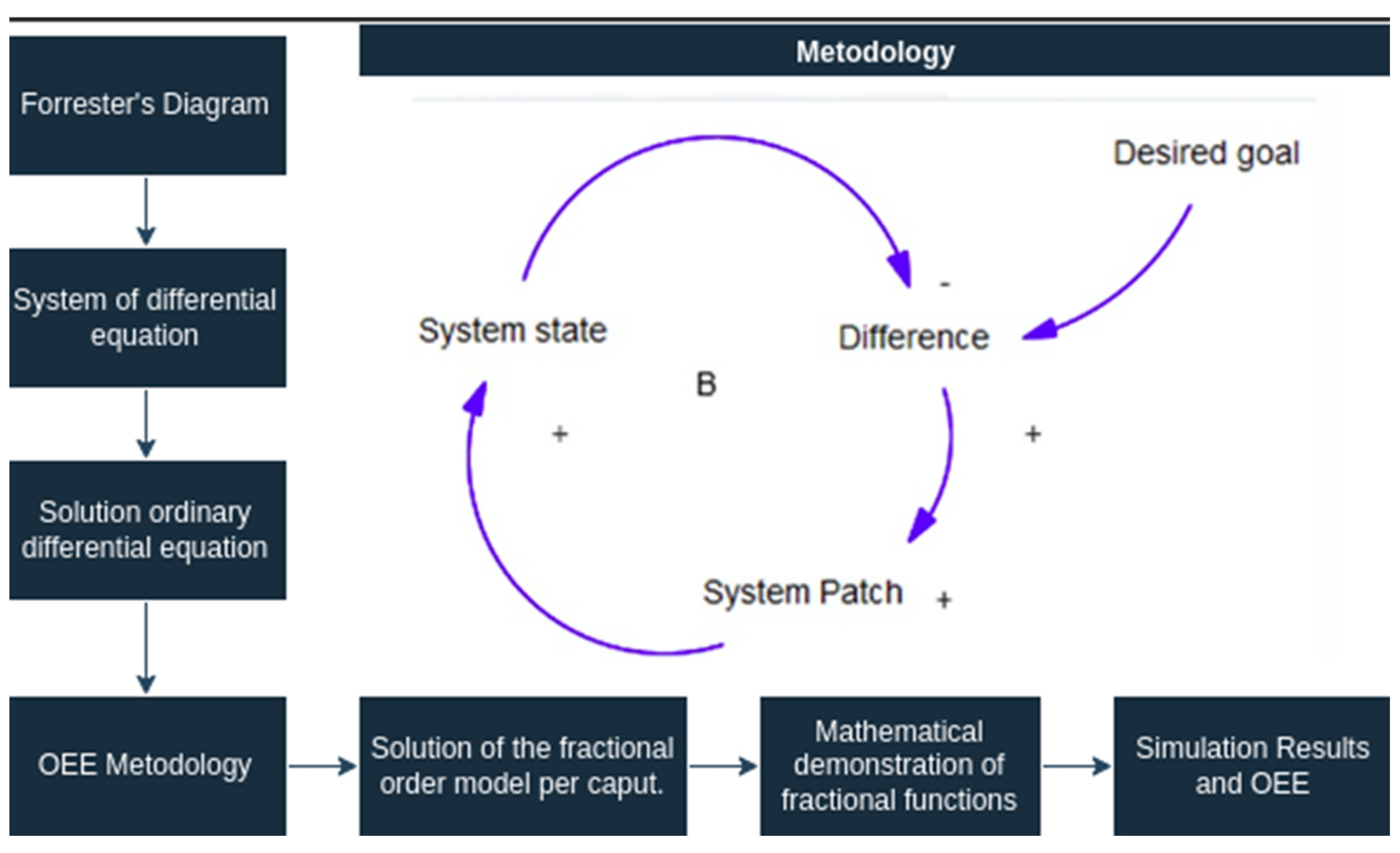
3. Methodology
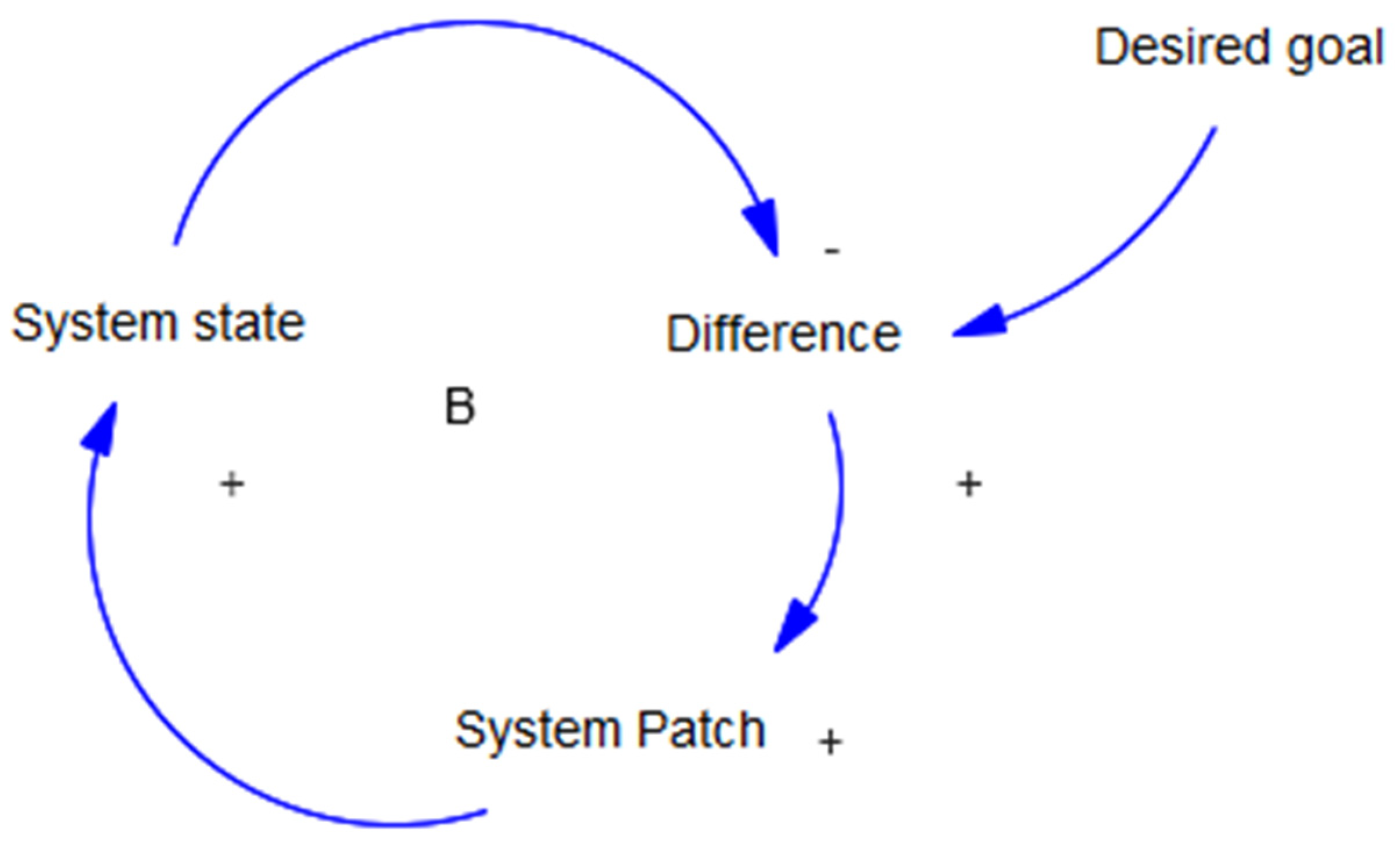
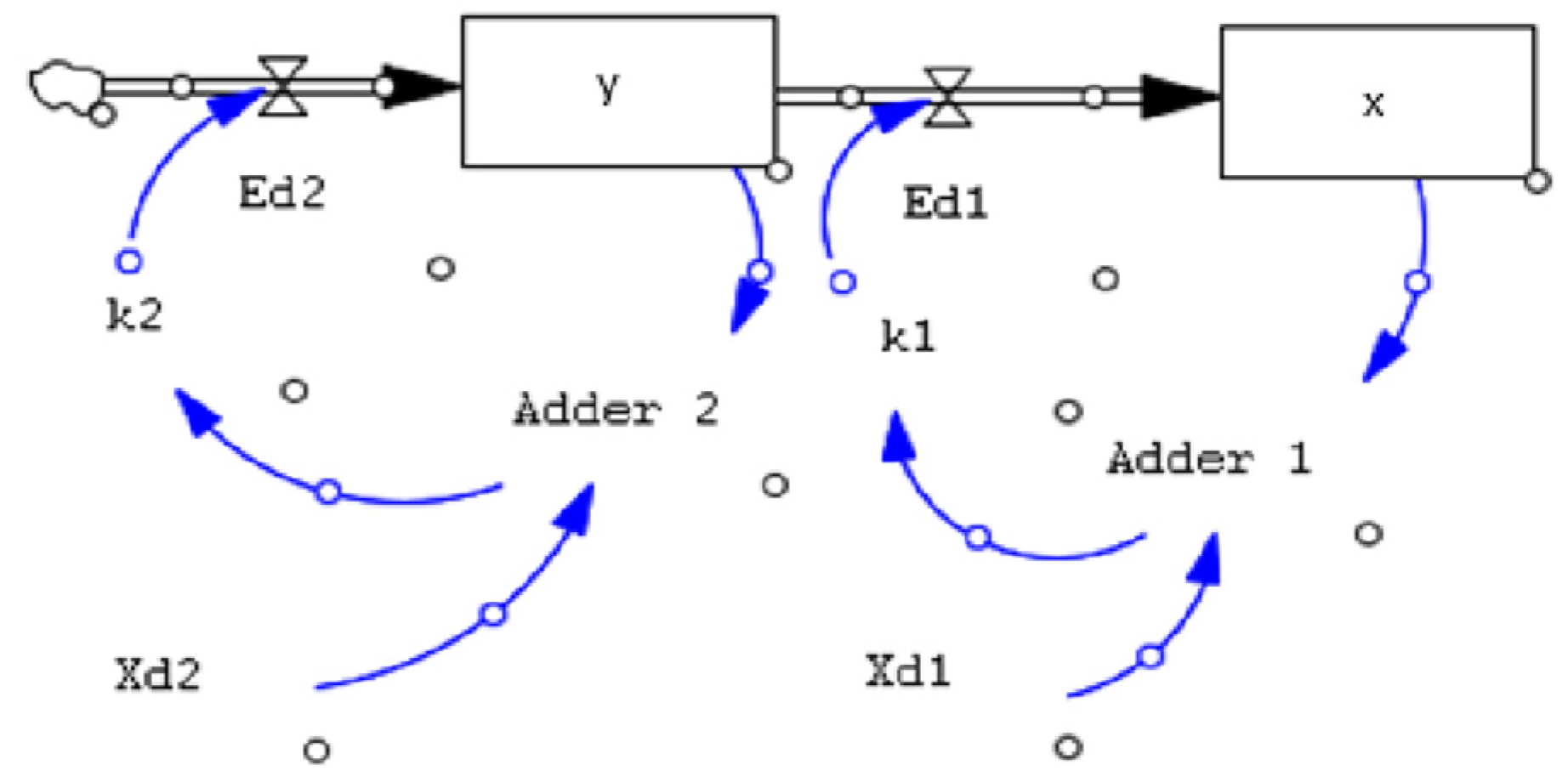
3.1. System Dynamics Model
3.2. System of Differential Equations
3.3. Solution Ordinary Differential Equation
3.4. OEE Methodology
3.4.1. Availability Factor
3.4.2. Quality Factor
3.4.3. Performance Factor
4. Results
4.1. Solution of The Fractional Order Model Per Caputo
4.2. Mathematical Demonstration of Fractional Functions
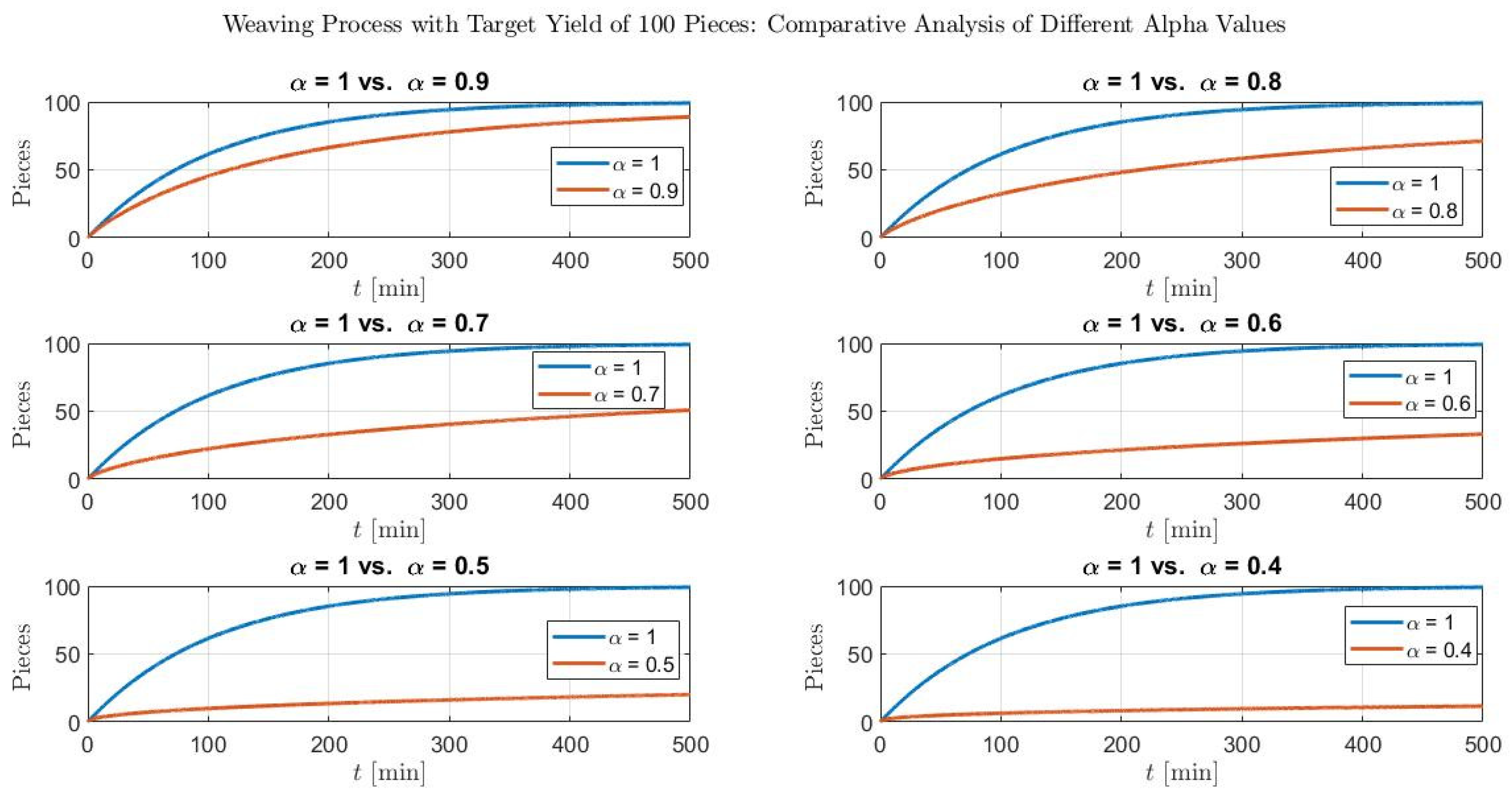
4.3. Simulating Diverse Scenarios
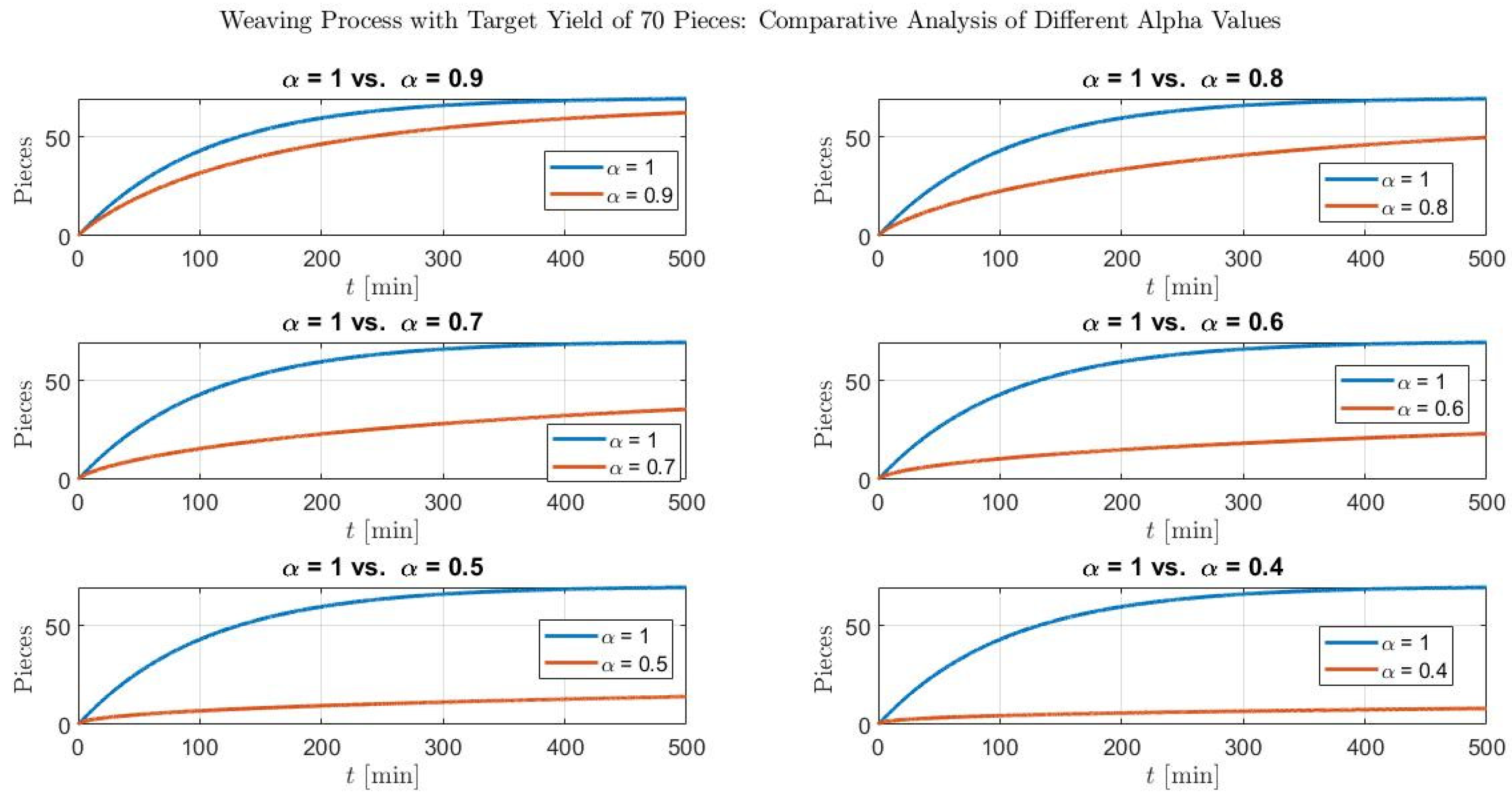
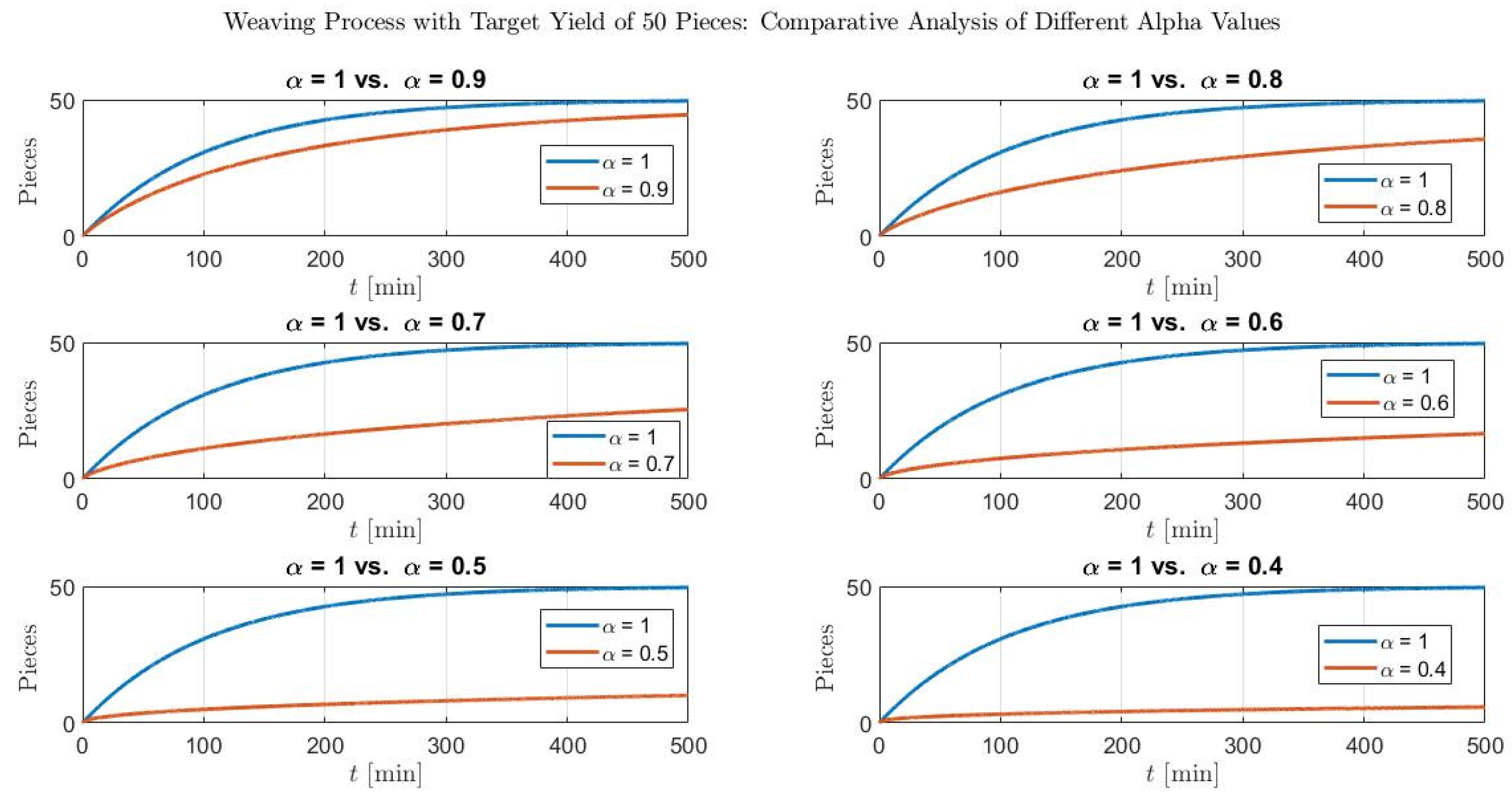
4.3.1. Simulation of Weaving Department Efficiencies
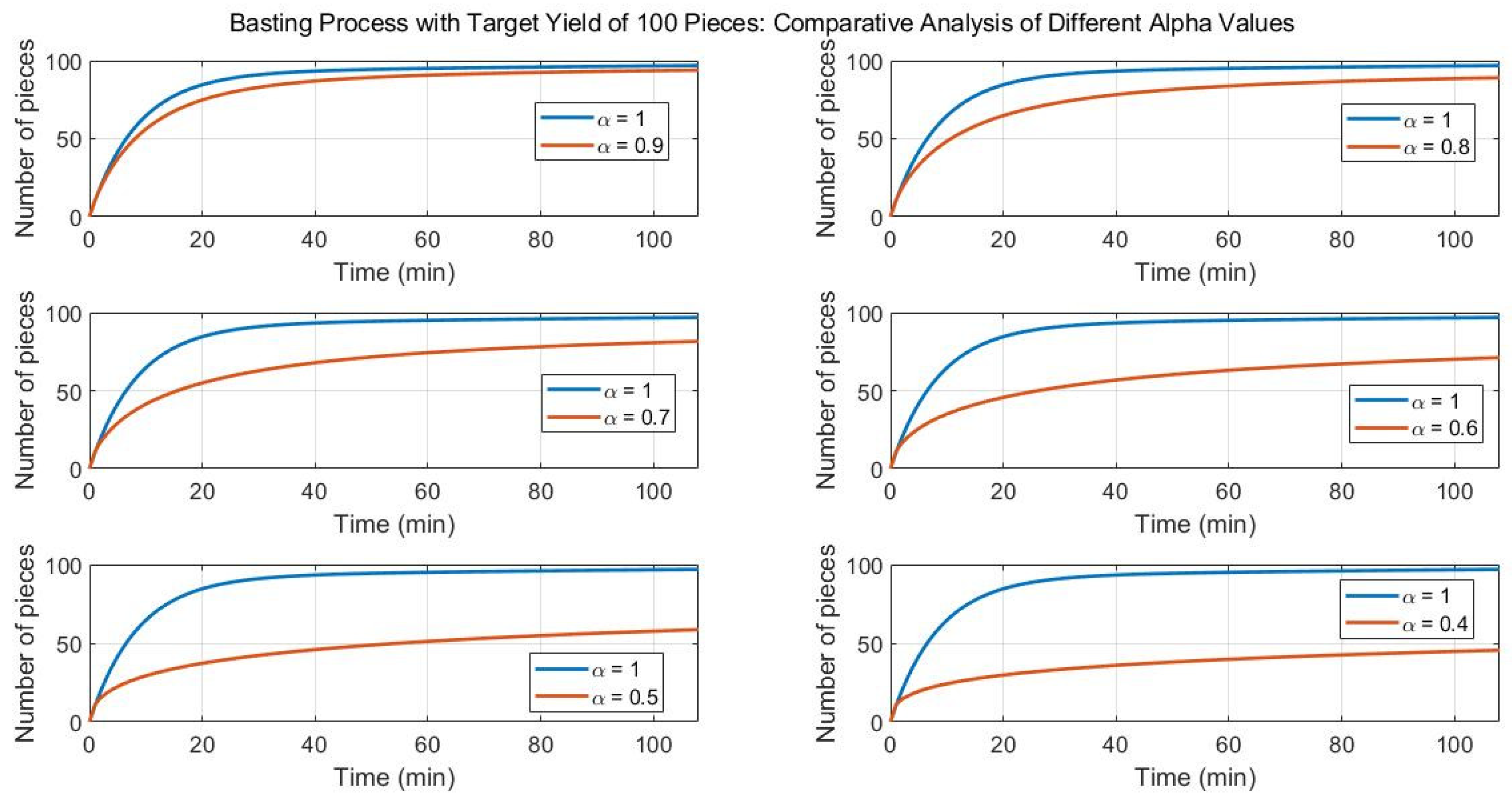
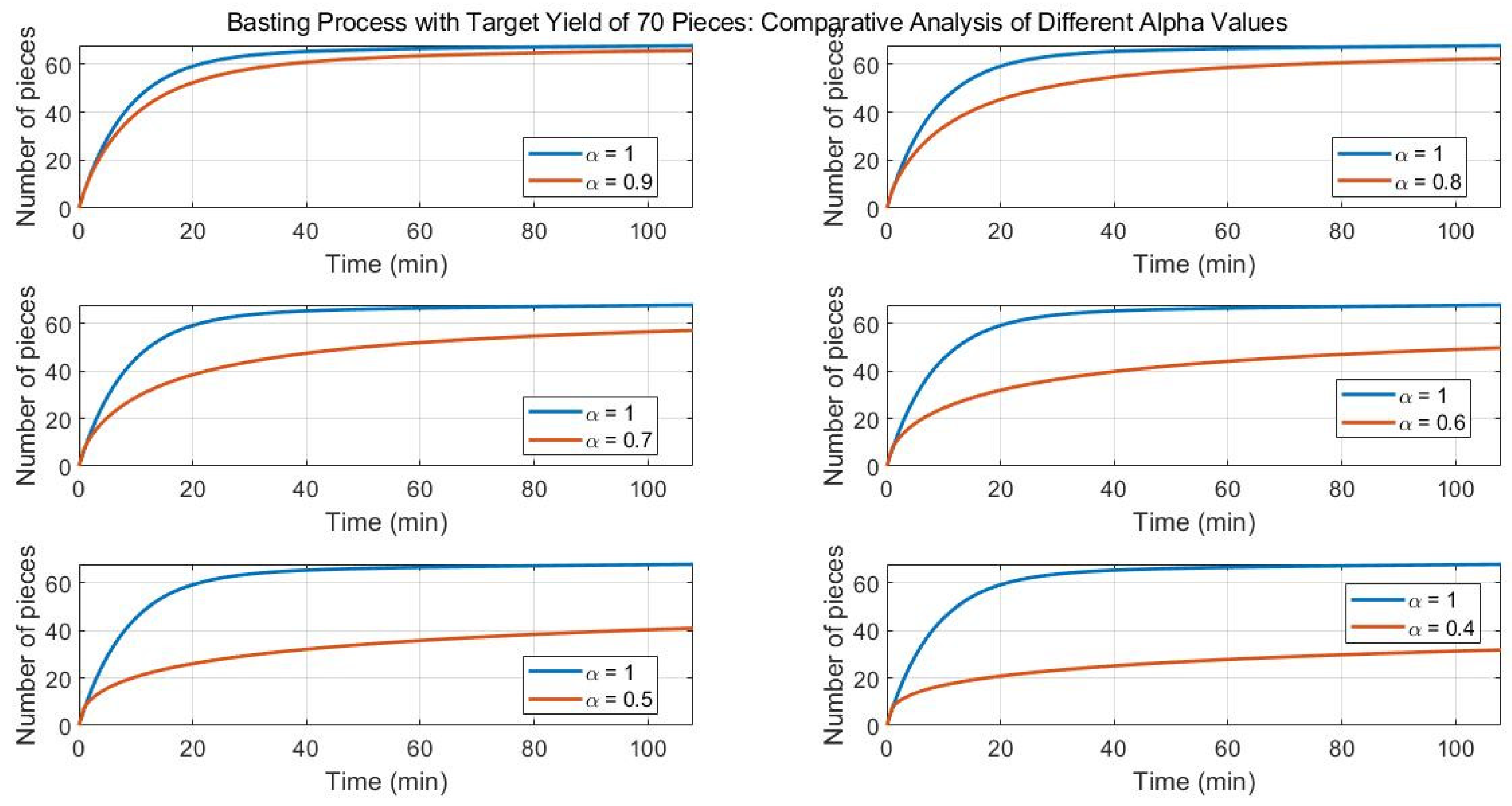
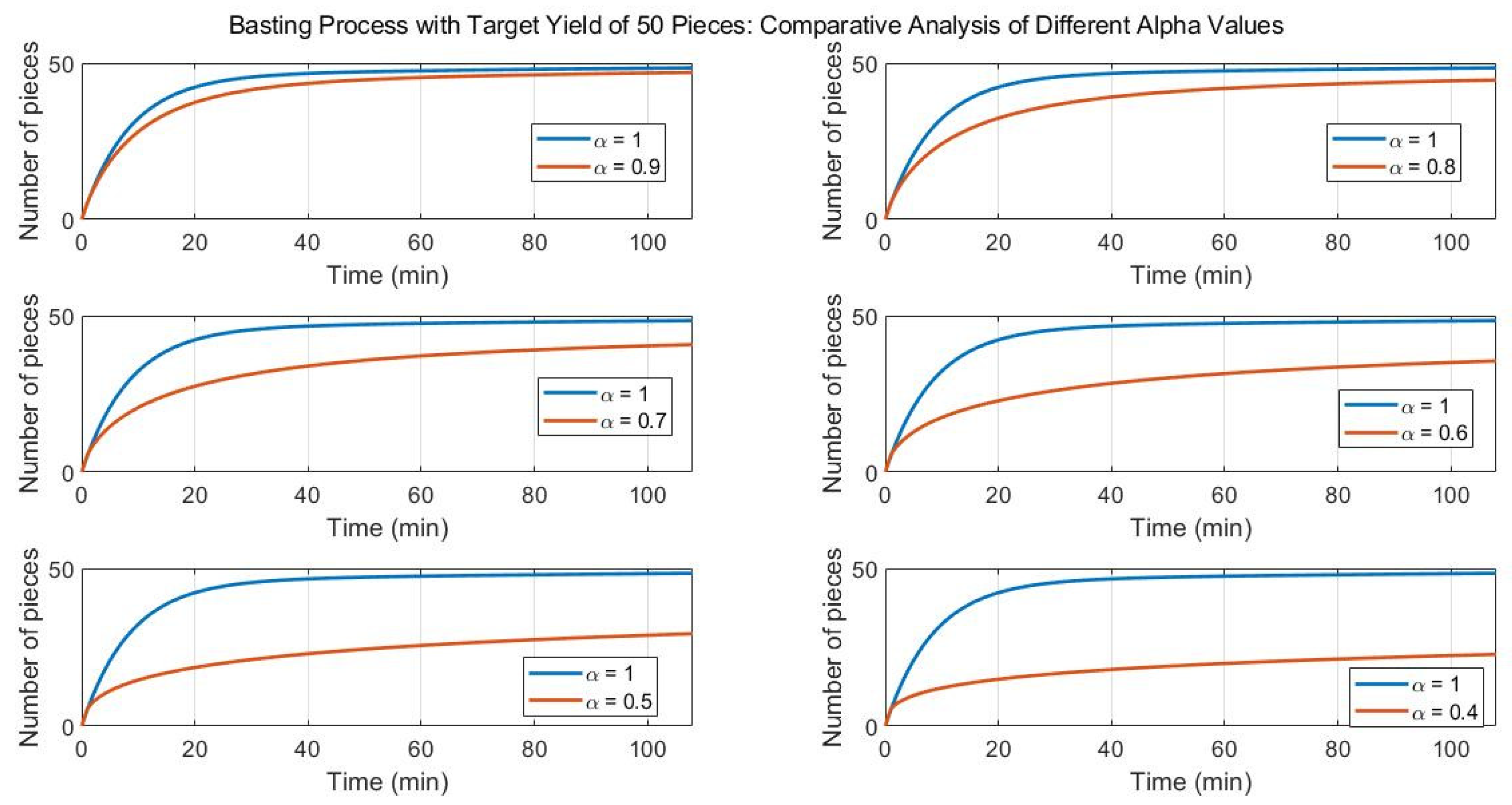
4.3.2. Simulation of Basting Department Efficiencies
4.4. Field Validation
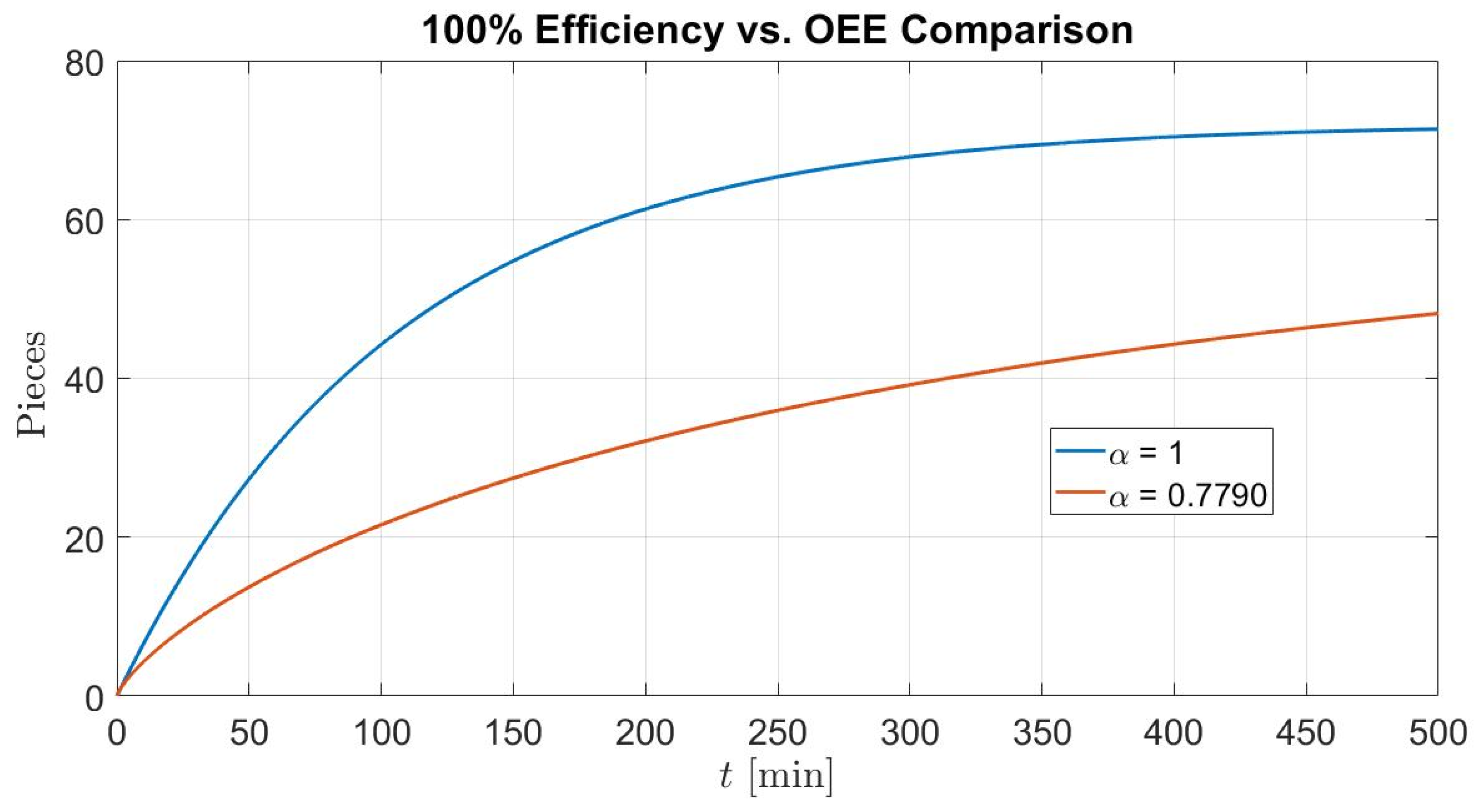
4.4.1. Simulation of Weaving Department Efficiencies
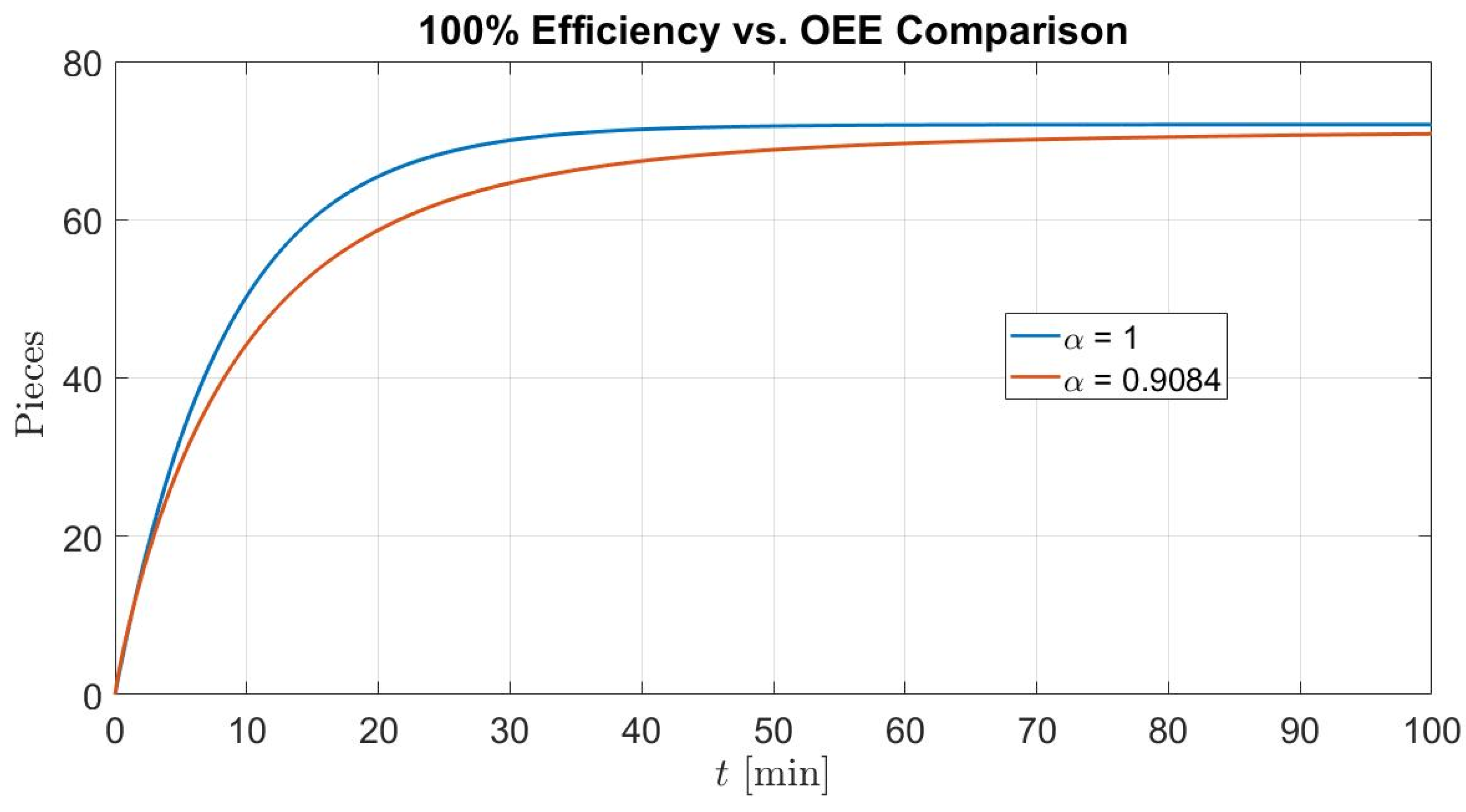
4.4.2. Simulation of Basting Department Efficiencies
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- García, J.M. Teoría y Ejercicios Prácticos de Dinámica de Sistemas: Dinámica de Sistemas con VENSIM PLE; Nova Science Publishers, Inc.: Hauppauge, NY, USA, 2023. [Google Scholar]
- Aracil, J.; Gordillo, F. Dinámica de Sistemas; Alianza Editorial: Madrid, Spain, 1997; p. 20. [Google Scholar]
- De Leo, E.; Aranda, D.; Addati, G. Introducción a la Dinámica de Sistemas; no. 739, Serie Documentos de Trabajo; University of CEMA: Buenos Aires, Argentina, 2020. [Google Scholar]
- Spinel, A.V. Análisis de Armónicos en Redes de Distribución con Recursos Renovables Conectados a Través de Inversores; Universidad De Los Andes: Bogota, Colombia, 2023. [Google Scholar]
- Abid, A.; Kallel, I.; Sanchez-Medina, J.; Ayed, M. Parameters Sensitivity Analysis of Ant Colony Based Clustering: Application for Student Grouping in Collaborative Learning Environment. IEEE Access 2023, 12, 24751–24761. [Google Scholar] [CrossRef]
- Cazcarro, I.; García-Gusano, D.; Iribarren, D.; Linares, P.; Romero, J.; Arocena, P.; Arto, I.; Banacloche, S.; Lechón, Y.; Miguel, L.; et al. Energy-socio-economic-environmental modelling for the EU energy and post-COVID-19 transitions. Sci. Total Environ. 2022, 805, 150329. [Google Scholar] [CrossRef] [PubMed]
- Angerhofer, B.; Angelides, M. System dynamics modelling in supply chain management: Research review. In Proceedings of the 2000 Winter Simulation Conference Proceedings (Cat. No.00CH37165), Orlando, FL, USA, 10–13 December 2000. [Google Scholar]
- Zimmermann, N.; Curran, K. Dynamics of interdisciplinarity: A microlevel analysis of communication and facilitation in a group model—Building workshop. Syst. Dyn. Rev. 2023, 39, 336–370. [Google Scholar] [CrossRef]
- Ortega, J.J.C.; Serrato, R.B.; Morales, R.A.L. Development of a system dynamics model based on Six Sigma methodology. Ing. Investig. 2017, 37, 80. [Google Scholar] [CrossRef]
- Wang, Z.; Li, X.; Mao, Y.; Li, L.; Wang, X.; Lin, Q. Dynamic simulation of land use change and assessment of carbon storage based on climate change scenarios at the city level: A case study of Bortala, China. Ecol. Indic. 2022, 134, 108499. [Google Scholar] [CrossRef]
- Zoghi, M.; Kim, S. Dynamic Modeling for Life Cycle Cost Analysis of BIM-Based Construction Waste Management. Sustainability 2020, 12, 2483. [Google Scholar] [CrossRef]
- Liu, J.; Liu, Y.; Wang, X. An environmental assessment model of construction and demolition waste based on system dynamics: A case study in Guangzhou. Environ. Sci. Pollut. Res. 2020, 27, 37237–37259. [Google Scholar] [CrossRef]
- De-Blas, I.; Miguel, L.; De-Castro, C. Modelos de evaluación integrada (IAMs) aplicados al cambio climático y la transición energética. DYNA-Ing. Ind. 2021, 96, 316. [Google Scholar]
- Sánchez, J.B.; Serrato, R.B.; Bianchetti, M. Design and Development of a Mathematical Model for an Industrial Process, in a System Dynamics Environment. Appl. Sci. 2022, 12, 9855. [Google Scholar] [CrossRef]
- Mojtahedzadeh, M.; Qureshi, H.I. Understanding End of Life Practices: Perspectives on Communication, Religion and Culture; Springer International Publishing: Berlin/Heidelberg, Germany, 1997; pp. 261–274. [Google Scholar]
- Mojtahedzadeh, M. Do parallel lines meet? How can pathway participation metrics and eigenvalue analysis produce similar results? Syst. Dyn. Rev. 2008, 24, 451–478. [Google Scholar] [CrossRef]
- Gonçalves, P. Behavior Modes, Pathways and Overall Trajectories: Eigenvector and Eigenvalue Analysis of Dynamic Systems. SSRN Electron. J. 2009, 25, 35–62. [Google Scholar] [CrossRef]
- Oliva, R. Structural dominance analysis of large and stochastic models. Syst. Dyn. Rev. 2016, 32, 26–51. [Google Scholar] [CrossRef]
- Schoenberg, W.; Hayward, J.; Eberlein, R. Improving Loops that Matter. Syst. Dyn. Rev. 2023, 39, 140–151. [Google Scholar] [CrossRef]
- Sánchez, J.M.B.; Serrato, R.B. Design and Development of an Optimal Control Model in System Dynamics through State-Space Representation. Appl. Sci. 2023, 13, 7154. [Google Scholar] [CrossRef]
- Sterman, J. Business Dynamics; Irwin/McGraw-Hill: New York, NY, USA, 2010; p. 982. [Google Scholar]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Mainardi, F. Fractional Calculus: Some Basic Problems in Continuum and Statistical Mechanics; Springer: Vienna, Austria, 1997; pp. 291–348. [Google Scholar]
- Magin, R. Fractional Calculus in Bioengineering, Part 1. Critical Reviews™. Biomed. Eng. 2004, 32, 104. [Google Scholar]
- Ramadevi, B.; Kasi, V.R.; Bingi, K. Hybrid LSTM-Based Fractional-Order Neural Network for Jeju Island’s Wind Farm Power Forecasting. Fractal Fract. 2024, 8, 149. [Google Scholar] [CrossRef]
- Moumen, A.; Mennouni, A.; Bouye, M. A Novel Vieta–Fibonacci Projection Method for Solving a System of Fractional In-tegrodifferential Equations. Mathematics 2023, 11, 3985. [Google Scholar] [CrossRef]
- Schiessel, H.; Metzler, R.; Blumen, A.; Nonnenmacher, T.F. Generalized viscoelastic models: Their fractional equations with solutions. J. Phys. A Math. Gen. 1995, 28, 6567–6584. [Google Scholar] [CrossRef]
- Meral, F.C.; Royston, T.J.; Magin, R. Fractional calculus in viscoelasticity: An experimental study. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 939–945. [Google Scholar] [CrossRef]
- Chen, W.; Sun, H.; Zhang, X.; Korošak, D. Anomalous diffusion modeling by fractal and fractional derivatives. Comput. Math. Appl. 2010, 59, 1754–1758. [Google Scholar] [CrossRef]
- Guia, M.; Gomez, F.; Rosales, J. Lomé and the North-South Relations (1975–1984): From the “New International Economic Order” to a New Conditionality. In Europe in a Globalising World; Nomos: Baden-Baden, Germany, 2013; Volume 11, pp. 123–146. [Google Scholar]
- Leonardo, M.-J.; Pedro, L.-L.; Adán, F.-B.; Manuel, L.-H.J. Automatic blood vessel detection using fractional Hessian matrices. ECORFAN J. 2022, 6, 12–19. [Google Scholar]
- Sengupta, S.; Ghosh, U.; Sarkar, S.; Das, S. Prediction of Ventricular Hypertrophy of Heart Using Fractional Calculus. J. Appl. Nonlinear Dyn. 2020, 9, 287–305. [Google Scholar] [CrossRef]
- Baba, I.A.; Humphries, U.W.; Rihan, F.A. Role of Vaccines in Controlling the Spread of COVID-19: A Fractional-Order Model. Vaccines 2023, 11, 145. [Google Scholar] [CrossRef] [PubMed]
- Ruby; Mandal, M. The geometrical and physical interpretation of fractional order derivatives for a general class of functions. Math. Methods Appl. Sci. 2024, 2024, 1–21. [Google Scholar] [CrossRef]
- Podlubny, I. Geometric and Physical Interpretation of Fractional Integration and Fractional Differentiation. arXiv 2001, arXiv:math/0110241. [Google Scholar]
- Heymans, N.; Podlubny, I. Physical interpretation of initial conditions for fractional differential equations with Riemann-Liouville fractional derivatives. Rheol. Acta 2006, 45, 765–771. [Google Scholar] [CrossRef]
- Tarasov, V.E. No violation of the Leibniz rule. No fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 2945–2948. [Google Scholar] [CrossRef]
- Micula, S. An iterative numerical method for fractional integral equations of the second kind. J. Comput. Appl. Math. 2018, 339, 124–133. [Google Scholar] [CrossRef]
- Jafari, H.; Tuan, N.; Ganji, R. A new numerical scheme for solving pantograph type nonlinear fractional integro-differential equations. J. King Saud Univ.—Sci. 2021, 33, 101185. [Google Scholar] [CrossRef]
- Sánchez-Muñoz, J. Hamilton y el descubrimiento de los Cuaterniones. Pensam. Matemático 2011, 7. [Google Scholar]
- De Oliveira, E.C.; Machado, T. A review of definitions for fractional derivatives and integral. Math. Probl. Eng. 2014, 2014, 1–6. [Google Scholar] [CrossRef]
- Khalil, R.; Al Horani, M.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Caputo, M.; Mainardi, F. A new dissipation model based on memory mechanism. Pure Appl. Geophys. 1971, 91, 134–147. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. Theory and Applications of Fractional Order Systems. Progr. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Artin, E. The Gamma Function; Courier Dover Publications: Mineola, NY, USA, 2015. [Google Scholar]
- Mittag-Leffler, G. Sur la représentation analytique d’une branche uniforme d’une fonction monogène: Seconde note. Acta Math. 1903, 24, 183–204. [Google Scholar] [CrossRef]
- Wiman, A. Über die Nullstellen der Funktionen E a (x). Acta Math. 1905, 29, 217–234. [Google Scholar] [CrossRef]
- Wiman, A. Über den Fundamentalsatz in der Teorie der Funktionen E a (x). Acta Math. 1905, 29, 191–201. [Google Scholar] [CrossRef]
- Zarslan, M.A.; Yılmaz, B. The extended Mittag-Leffler function and its properties. J. Inequalities Appl. 2014, 2014, 1–10. [Google Scholar] [CrossRef]
- Khan, M.A.; Ahmed, S. On some properties of the generalized Mittag-Leffler function. SpringerPlus 2013, 2, 337. [Google Scholar] [CrossRef]
- Makris, N. The Fractional Derivative of the Dirac Delta Function and Additional Results on the Inverse Laplace Transform of Irrational Functions. Fractal Fract. 2021, 5, 18. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State Variable | Notation of the Variable | Xd (Goals) | Adder | Differential Equation |
|---|---|---|---|---|
| Weaving | ||||
| Basting | Ed y) k2 − Ed1 |
| Day | 25 | 26 | 27 | 28 | 29 | 30 |
|---|---|---|---|---|---|---|
| Total time (min) | 690 | 690 | 690 | 690 | 690 | 630 |
| Breaks (min) | 120 | 120 | 120 | 120 | 120 | 120 |
| Maintenance stoppage (min) | 10 | 10 | 10 | 10 | 10 | 45 |
| Shutdowns of machine records (min) | 20.43 | 29.21 | 36.23 | 20.78 | 32.45 | 30.27 |
| (A) Planned time available (min) | 560 | 560 | 560 | 560 | 560 | 465 |
| (B) Productive time (min) | 539.5 | 530.7 | 523.7 | 539.2 | 527.5 | 434.73 |
| (B/A) Availability (%) | 96.35 | 94.78 | 93.53 | 96.29 | 94.21 | 93.49 |
| Day | 25 | 26 | 27 | 28 | 29 | 30 |
|---|---|---|---|---|---|---|
| Total Time (min) | 100 | 100 | 100 | 100 | 100 | 90 |
| Breaks (min) | 20 | 20 | 20 | 20 | 20 | 20 |
| (A) Planned time available (min) | 80 | 80 | 80 | 80 | 80 | 70 |
| (B) Productive time (min) | 79.26 | 79.35 | 76.55 | 78.41 | 79.95 | 69.73 |
| (B/A) Availability (%) | 99.10 | 99.19 | 95.70 | 98.03 | 99.95 | 99.63 |
| Day | 25 | 26 | 27 | 28 | 29 | 30 |
|---|---|---|---|---|---|---|
| (A) Actual production- total parts | 80 | 79 | 72 | 72 | 69 | 55 |
| Contaminated canvases | 0 | 1 | 0 | 2 | 0 | 0 |
| Overlay | 5 | 6 | 5 | 10 | 7 | 10 |
| Non-functional canvases | 1 | 3 | 3 | 5 | 3 | 7 |
| (B) Good pieces | 74 | 69 | 64 | 55 | 59 | 38 |
| (B/A) Quality (%) | 92.50 | 87.34 | 88.89 | 76.39 | 85.51 | 69.09 |
| Day | 25 | 26 | 27 | 28 | 29 | 30 |
|---|---|---|---|---|---|---|
| (A) Actual production-total parts | 75 | 64 | 72 | 79 | 88 | 81 |
| (B) Good pieces | 75 | 64 | 72 | 78 | 88 | 80 |
| (B/A) Quality (%) | 100 | 100 | 100 | 98.73 | 100 | 98.77 |
| Day | 25 | 26 | 27 | 28 | 29 | 30 |
|---|---|---|---|---|---|---|
| (A) Planned production (total pieces) | 82.7 | 79.3 | 72.98 | 73.44 | 69.24 | 55.21 |
| (B) Real production | 80 | 79 | 72 | 72 | 69 | 55 |
| (B/A) Performance (%) | 96.70 | 99.59 | 98.66 | 98.04 | 99.65 | 99.63 |
| Day | 25 | 26 | 27 | 28 | 29 | 30 |
|---|---|---|---|---|---|---|
| (A) Planned production (total pieces) | 78.0 | 78.1 | 75.3 | 83.7 | 96.5 | 84.2 |
| (B) Real production | 75 | 64 | 72 | 79 | 88 | 81 |
| (B/A) Performance (%) | 96.10 | 81.93 | 95.54 | 94.38 | 91.16 | 96.20 |
| Day | 25 | 26 | 27 | 28 | 29 | 30 | OEE Weekly |
|---|---|---|---|---|---|---|---|
| OEE (Weaving) (%) | 86.1 | 82.4 | 82.0 | 72.1 | 80.2 | 64.3 | 77.90 |
| OEE (Basting) (%) | 95.2 | 81.2 | 91.4 | 91.3 | 91.1 | 94.6 | 90.84 |
| Scenarios | Category | Target (Pieces) | Efficiency |
|---|---|---|---|
| Scenario 1 | Optimal | 100 | |
| Very good | |||
| Good | |||
| Fair | |||
| Poor | |||
| Very poor | |||
| Scenario 2 | Optimal | 70 | |
| Very good | |||
| Good | |||
| Fair | |||
| Poor | |||
| Very poor | |||
| Scenario 3 | Optimal | 50 | |
| Very good | |||
| Good | |||
| Fair | |||
| Poor | |||
| Very poor |
| Scenarios | Category | Target (Pieces) | Efficiency |
|---|---|---|---|
| Scenario 1 | Optimal | 100 | |
| Very good | |||
| Good | |||
| Fair | |||
| Poor | |||
| Very poor | |||
| Scenario 2 | Optimal | 70 | |
| Very good | |||
| Good | |||
| Fair | |||
| Poor | |||
| Very poor | |||
| Scenario 3 | Optimal | 50 | |
| Very good | |||
| Good | |||
| Fair | |||
| Poor | |||
| Very poor |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barrios-Sánchez, J.M.; Baeza-Serrato, R.; Martínez-Jiménez, L. Fractional Calculus to Analyze Efficiency Behavior in a Balancing Loop in a System Dynamics Environment. Fractal Fract. 2024, 8, 212. https://doi.org/10.3390/fractalfract8040212
Barrios-Sánchez JM, Baeza-Serrato R, Martínez-Jiménez L. Fractional Calculus to Analyze Efficiency Behavior in a Balancing Loop in a System Dynamics Environment. Fractal and Fractional. 2024; 8(4):212. https://doi.org/10.3390/fractalfract8040212
Chicago/Turabian StyleBarrios-Sánchez, Jorge Manuel, Roberto Baeza-Serrato, and Leonardo Martínez-Jiménez. 2024. "Fractional Calculus to Analyze Efficiency Behavior in a Balancing Loop in a System Dynamics Environment" Fractal and Fractional 8, no. 4: 212. https://doi.org/10.3390/fractalfract8040212
APA StyleBarrios-Sánchez, J. M., Baeza-Serrato, R., & Martínez-Jiménez, L. (2024). Fractional Calculus to Analyze Efficiency Behavior in a Balancing Loop in a System Dynamics Environment. Fractal and Fractional, 8(4), 212. https://doi.org/10.3390/fractalfract8040212