Assessing the Accuracy of Digital Surface Models Derived from Optical Imagery Acquired with Unmanned Aerial Systems

 ,
,  ,
,  , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
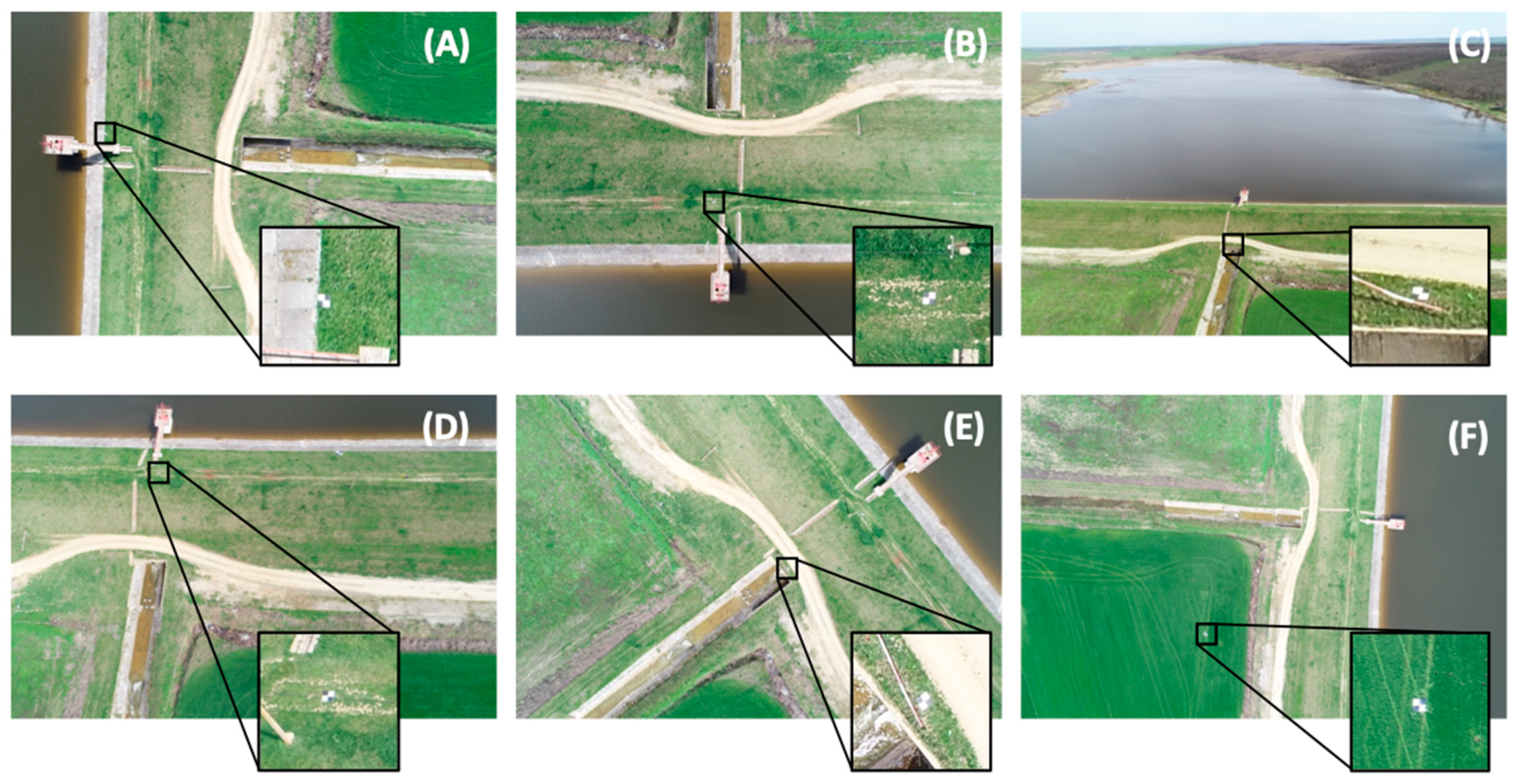
2.1. Study Area
2.2. Primary Data Collection
2.3. Data Processing
3. Accuracy Assessment of the 3D Models
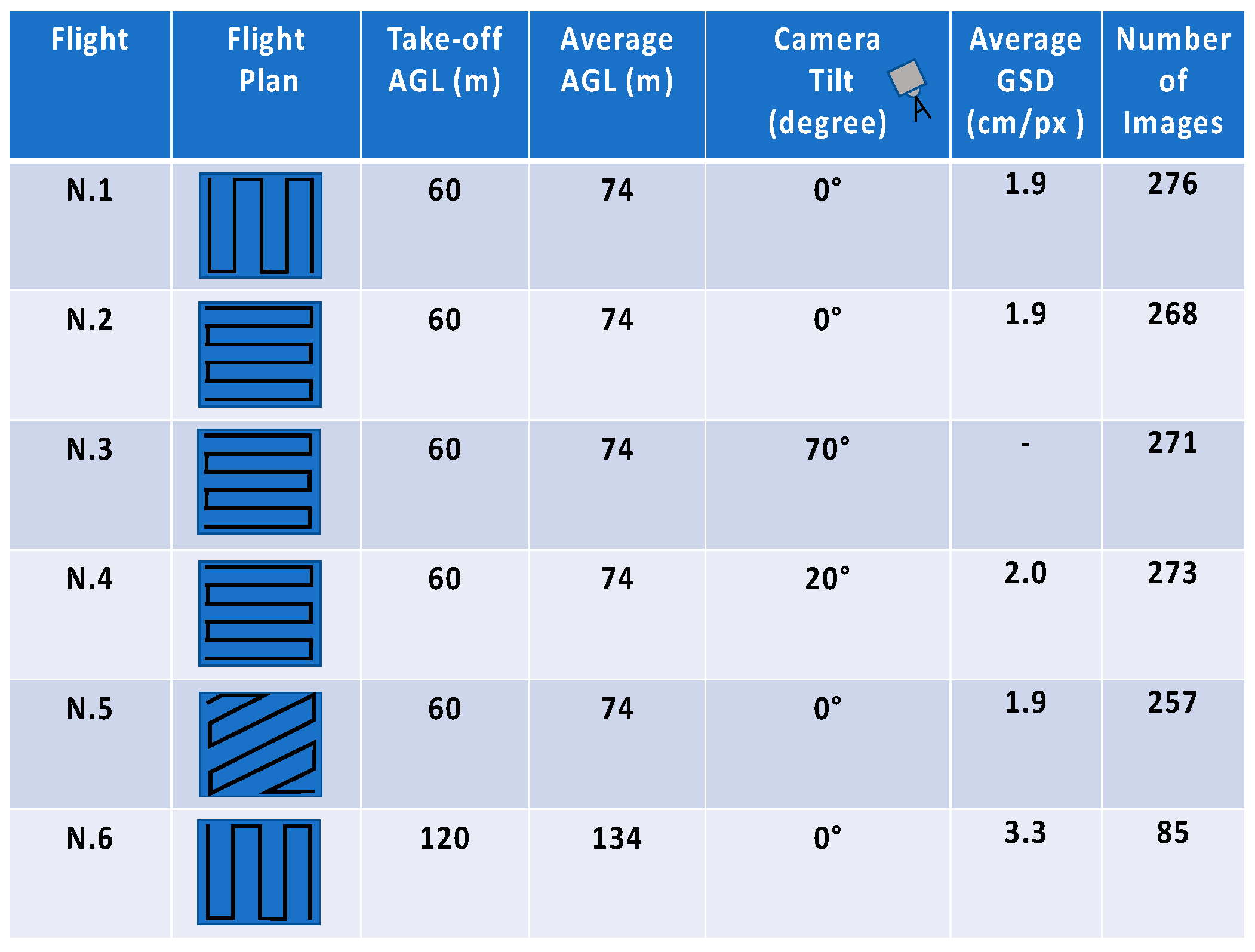
3.1. Impact of Mission Planning on DSMs
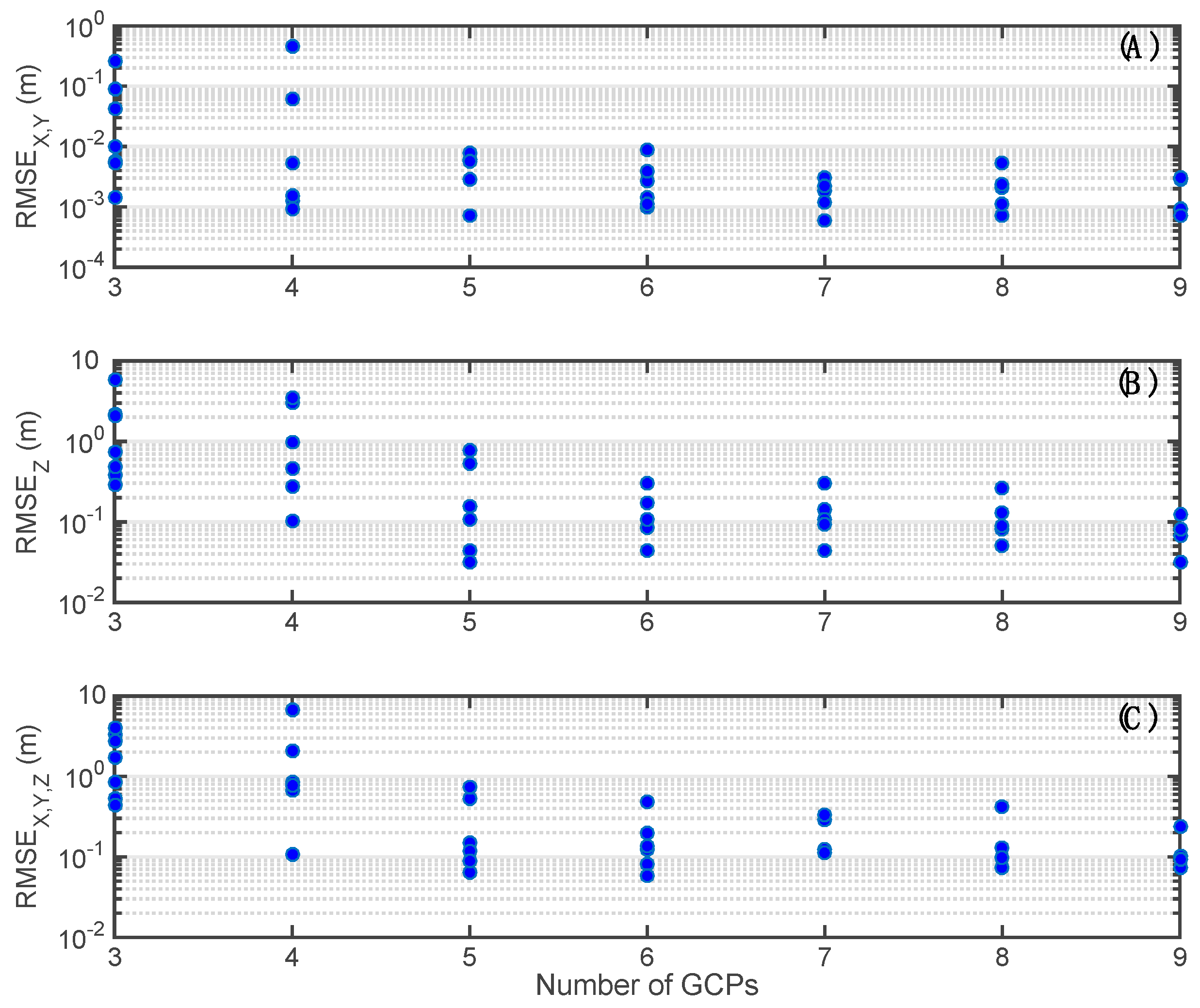
3.2. Use of GCPs in SfM-MVS Processing
3.2.1. DSMs Derived from a Single Flight
3.2.2. DSMs Derived from the Combination of Two Flights
3.2.3. Spatial Distribution of GCPs
4. Discussion
5. Conclusions
- (1)
- UAS-derived orthomosaics can produce a planar accuracy of a few centimeters, whereas the vertical accuracy of DSMs is always lower. This is likely due to the fact that most UASs adopt a camera in a zenithal position that provides a more accurate description of planar features. Vertical measurements are generally more complex, but also critical for studies of change detection.
- (2)
- The flight plan and camera configuration may significantly impact the overall quality of the resulting DSM. Therefore, it should be planned thoroughly to produce the best depiction of the entire area. For instance, a transversal survey with respect to a given structure provides better description and quality of the resulting 3D surface.
- (3)
- The use of a tilted camera can improve the amount of information (retrieved number of points) for inclined surfaces, providing higher DSM elevation accuracy. The tilted camera images increase the robustness of the geometrical model, providing also a possible strategy to reduce the total number of GCPs adopted over a given area. This can be beneficial especially in inaccessible areas.
- (4)
- The combination of several flights may be extremely beneficial for DSM accuracy. This improves the overall quality of the results, exploiting information redundancy derived by different flight plans and camera configurations.
- (5)
- The planar and vertical accuracies can be improved by increasing the number of GCPs and their relative distances. It is therefore convenient to evenly spread GCPs in space. In many cases, such ideal settings are not possible and a combination of flights, that include the use of a tilted camera, can be used to reduce sensitivity to this parameter in the final vertical accuracy of the DSMs.
Author Contributions
Funding
Conflicts of Interest
References
- Cook, S.J.; Clarke, L.E.; Nield, J.M. Geomorphological Techniques (Online Edition); British Society for Geomorphology: London, UK, 2012. [Google Scholar]
- Kraus, K.; Waldhausl, P. Photogrammetry, Volume 1: Fundamentals and Standard Processes; Ferd. Dümmlers Verlog: Bonn, Germany, 1993. [Google Scholar]
- Krauss, K.; Jansa, J.; Kager, H. Photogrammetry, Volume 2: Advanced Methods and Applications; Ferd. Dümmlers Verlog: Bonn, Germany, 1997. [Google Scholar]
- Luhmann, T.; Robson, S.; Kyle, S.A.; Harley, I.A. Close Range Photogrammetry: Principles, Techniques and Applications; Whittles: Dunbeath, UK, 2006. [Google Scholar]
- Mikhail, E.M.; Bethel, J.S.; McGlone, J.C. Introduction to Modern Photogrammetry; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Manfreda, S.; McCabe, M.F.; Miller, P.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef]
- Lucieer, A.; Jong, S.M.D.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Progr. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Smith, M.W.; Vericat, D. From experimental plots to experimental landscapes: Topography, erosion and deposition in sub-humid badlands from structure-from-motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 1656–1671. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Ridolfi, E.; Buffi, G.; Venturi, S.; Manciola, P. Accuracy Analysis of a Dam Model from Drone Surveys. Sensors 2017, 17, 1777. [Google Scholar] [CrossRef]
- Singh, K.K.; Frazier, A.E. A meta-analysis and review of unmanned aircraft system (UAS) imagery for terrestrial applications. Int. J. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Rock, G.; Ries, J.B.; Udelhoven, T. Sensitivity analysis of UAV-photogrammetry for creating digital elevation models (DEM). In Proceedings of the Conference on Unmanned Aerial Vehicle in Geomatics, Zurich, Switzerland, 14–16 September 2011. [Google Scholar]
- Tahar, K.N. An evaluation on different number of ground control points in unmanned aerial vehicle photogrammetric block. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 93–98. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Cryderman, C.; Mah, S.B.; Shufletoski, A. Evaluation of UAV photogrammetric accuracy for mapping and earthworks computations. Geomatica 2014, 68, 309–317. [Google Scholar] [CrossRef]
- Gómez-Candón, D.; De Castro, A.I.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Uysal, M.; Toprak, A.S.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- Küng, O.; Strecha, C.; Beyeler, A.; Zufferey, J.C.; Floreano, D.; Fua, P.; Gervaix, F. The accuracy of automatic photogrammetric techniques on ultra-light UAV imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 125–130. [Google Scholar] [CrossRef]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Koci, J.; Jarihani, B.; Leon, J.X.; Sidle, R.C.; Wilkinson, S.N.; Bartley, R. Assessment of UAV and ground-based Structure from Motion with multi-view stereo photogrammetry in a gullied savanna catchment. ISPRS Int. Geo-Inf. 2017, 6, 328. [Google Scholar] [CrossRef]
- Oniga, V.-E.; Breaban, A.-I.; Statescu, F. Determining the Optimum Number of Ground Control Points for Obtaining High Precision Results Based on UAS Images. Proceedings 2018, 2, 352. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G. Ground-Control Networks for Image Based Surface Reconstruction: An Investigation of Optimum Survey Designs Using UAV Derived Imagery and Structure-from-Motion Photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy Assessment of Digital Surface Models from Unmanned Aerial Vehicles’ Imagery on Glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117, F03017. [Google Scholar] [CrossRef]
- Pepe, M.; Fregonese, L.; Scaioni, M. Planning airborne photogrammetry and remote-sensing missions with modern platforms and sensors. Eur. J. Remote Sens. 2018, 51, 412–436. [Google Scholar] [CrossRef]
- Müllerová, J.; Bartaloš, T.; Brůna, J.; Dvořák, P.; Vítková, M. Unmanned aircraft in nature conservation—An example from plant invasions. Int. J. Remote Sens. 2017, 38, 2177–2198. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.-J. Accuracy analysis of photogrammetric UAV image blocks: Influence of onboard RTK-GNSS and cross flight patterns. Photogramm.-Fernerkund.-Geoinf. 2016, 2016, 17–30. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Area (ha) | Number of GCPs | AGL (m) | RMSEX,Y (cm) | RMSEZ (cm) | RMSE Total (cm) |
|---|---|---|---|---|---|---|
| Rock et al. [18] | N/A | 1042 | 50–550 | N/A | 5.5 | N/A |
| Tahar [19] | 150 | 8–9 | N/A | 50.0 | 78.0 | N/A |
| Mancini et al. [20] | 2.75 | 18 | 40 | 0.8 | 10.0 | N/A |
| Hugenholtz et al. [21] | 4.5 | 28 | 200 | 18 | 29 | N/A |
| Lucieer et al. [11] | 0.75 | 39 | N/A | 7.4 | 6.2 | N/A |
| Cryderman et al. [22] | 7.12 | 11 | 118 | 3.3 | 3.1 | 4.6 |
| Gómez–Candón et al. [23] | 1.0 | 11–45 | 30–100 | N/A | N/A | 0.29–0.12 |
| Uysal et al. [24] | 5.0 | 27 | 60 | N/A | 6.62 | N/A |
| Kung et al. [25] | 210.0 | 19 | 262 | 38 | 107 | 125 |
| Agüera-Vega et al. [26] | 17.64 | 4–15–20 | 120 | 7–4.5–1.7 | 33–5.8–4.7 | N/A |
| Koci et al. [27] | 41–45–72 | 6–7 | 100 | N/A | 30.9–68.7–95.9 | N/A |
| James et al. [14] | 7.5 | 4–27 | 100 | 4.9 | N/A | 1.6 |
| Oniga et al. [28] | 1.0 | 3–40 | 28–35 | 4.5–8.9 | 6.6–4.0 | 7.4–7.9 |
| Planar Coordinates—RMSEX,Y (m) | |||||||
| Flight | N.1 | N.2 | N.3 | N.4 | N.5 | N.6 | |
| N.1 | 4.47 | ||||||
| N.2 | 2.39 | 2.03 | |||||
| N.3 | 136.05 | 1497.25 | - | ||||
| N.4 | 1.64 | 3.08 | 3835.20 | 7.75 | |||
| N.5 | 2.09 | 1.95 | 15,042.56 | 8.05 | 7.15 | ||
| N.6 | 3.06 | 3.35 | 1750.11 | 8.63 | 6.94 | 19.70 | |
| Elevation—RMSEZ (m) | |||||||
| Flight | N.1 | N.2 | N.3 | N.4 | N.5 | N.6 | |
| N.1 | 82.90 | ||||||
| N.2 | 81.18 | 78.72 | |||||
| N.3 | 80.32 | 56.94 | - | ||||
| N.4 | 79.21 | 76.94 | 15.51 | 75.02 | |||
| N.5 | 77.90 | 77.86 | 7.70 | 73.35 | 71.86 | ||
| N.6 | 78.79 | 75.48 | 20.25 | 72.85 | 70.27 | 59.75 | |
| Relative Elevation—RMSEZ (m) | |||||||
| Flight | N.1 | N.2 | N.3 | N.4 | N.5 | N.6 | |
| N.1 | 1.06 | ||||||
| N.2 | 0.39 | 0.37 | |||||
| N.3 | 3.74 | 19.55 | - | ||||
| N.4 | 0.55 | 0.42 | 5.88 | 0.11 | |||
| N.5 | 0.39 | 0.25 | 8.00 | 0.47 | 0.26 | ||
| N.6 | 0.22 | 0.94 | 13.85 | 0.80 | 0.40 | 3.44 | |
| Planar and vertical—RMSE (m) | |||||||
| Flight | N.1 | N.2 | N.3 | N.4 | N.5 | N.6 | |
| N.1 | 4.59 | ||||||
| N.2 | 2.42 | 2.06 | Performances | ||||
| N.3 | 136.10 | 1497.38 | - | Good | |||
| N.4 | 1.73 | 3.11 | 3835.20 | 7.75 | Medium | ||
| N.5 | 2.13 | 1.97 | 15,042.56 | 8.06 | 7.15 | Low | |
| N.6 | 3.07 | 3.48 | 1750.16 | 8.67 | 6.95 | 20.00 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manfreda, S.; Dvorak, P.; Mullerova, J.; Herban, S.; Vuono, P.; Arranz Justel, J.J.; Perks, M. Assessing the Accuracy of Digital Surface Models Derived from Optical Imagery Acquired with Unmanned Aerial Systems. Drones 2019, 3, 15. https://doi.org/10.3390/drones3010015
Manfreda S, Dvorak P, Mullerova J, Herban S, Vuono P, Arranz Justel JJ, Perks M. Assessing the Accuracy of Digital Surface Models Derived from Optical Imagery Acquired with Unmanned Aerial Systems. Drones. 2019; 3(1):15. https://doi.org/10.3390/drones3010015
Chicago/Turabian StyleManfreda, Salvatore, Petr Dvorak, Jana Mullerova, Sorin Herban, Pietro Vuono, José Juan Arranz Justel, and Matthew Perks. 2019. "Assessing the Accuracy of Digital Surface Models Derived from Optical Imagery Acquired with Unmanned Aerial Systems" Drones 3, no. 1: 15. https://doi.org/10.3390/drones3010015
APA StyleManfreda, S., Dvorak, P., Mullerova, J., Herban, S., Vuono, P., Arranz Justel, J. J., & Perks, M. (2019). Assessing the Accuracy of Digital Surface Models Derived from Optical Imagery Acquired with Unmanned Aerial Systems. Drones, 3(1), 15. https://doi.org/10.3390/drones3010015