Adaptive Water Sampling Device for Aerial Robots




Abstract
:1. Introduction
2. Materials and Methods
2.1. UAV and Sensor Components for Adaptive Water Sampling
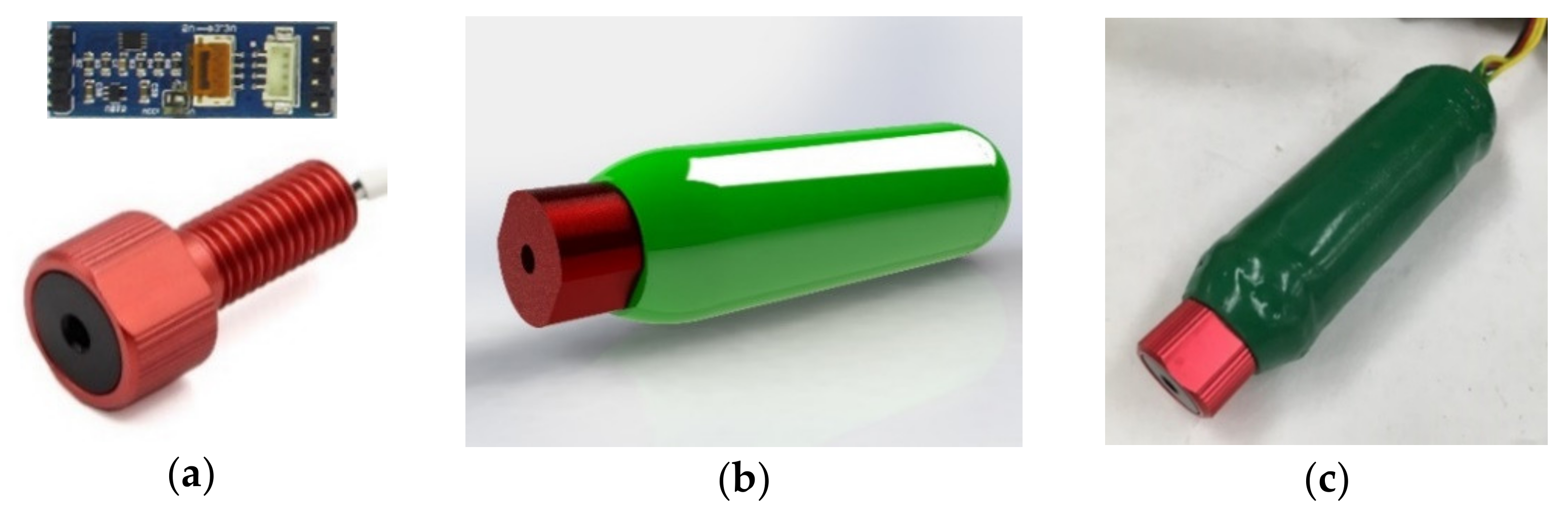
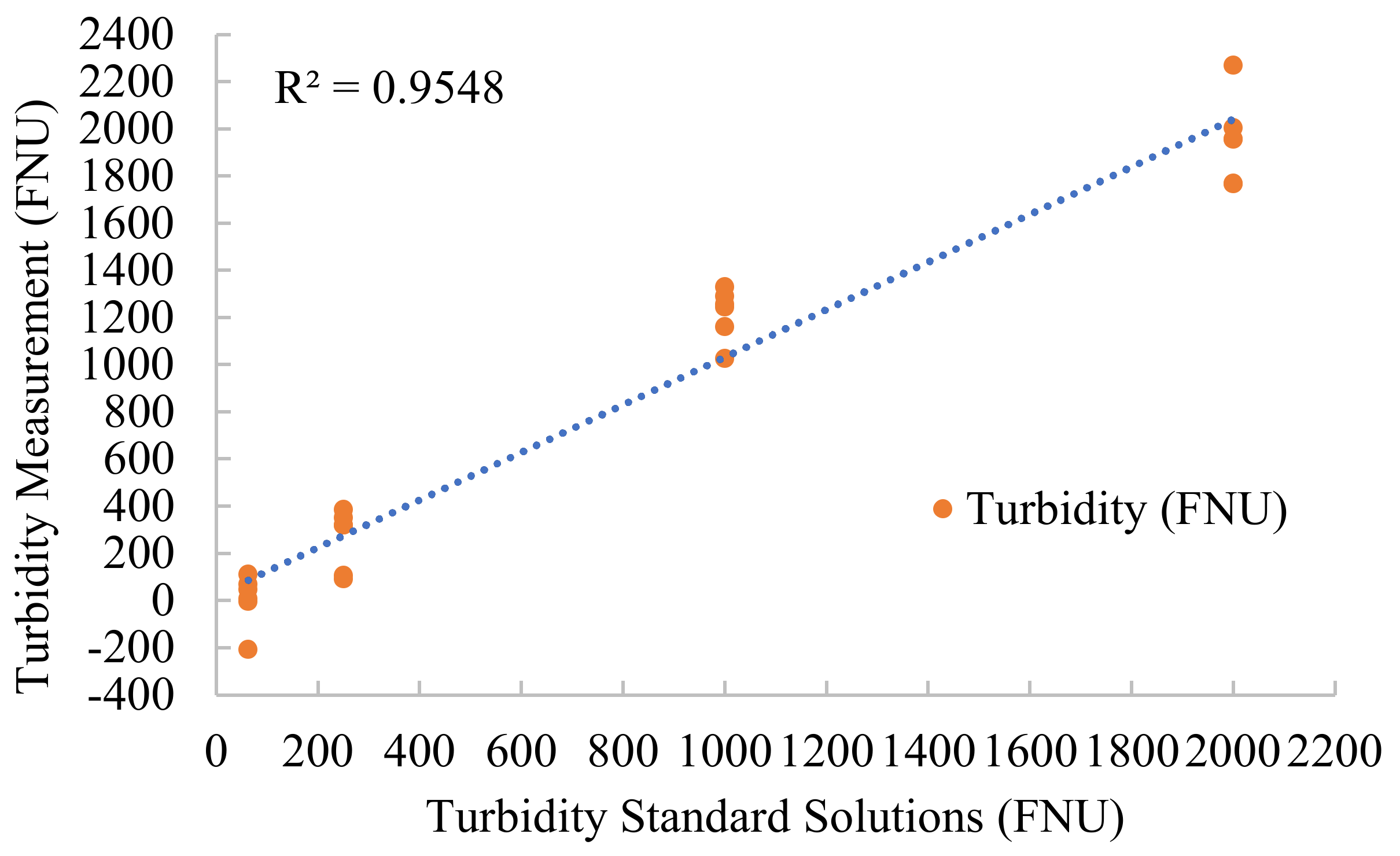
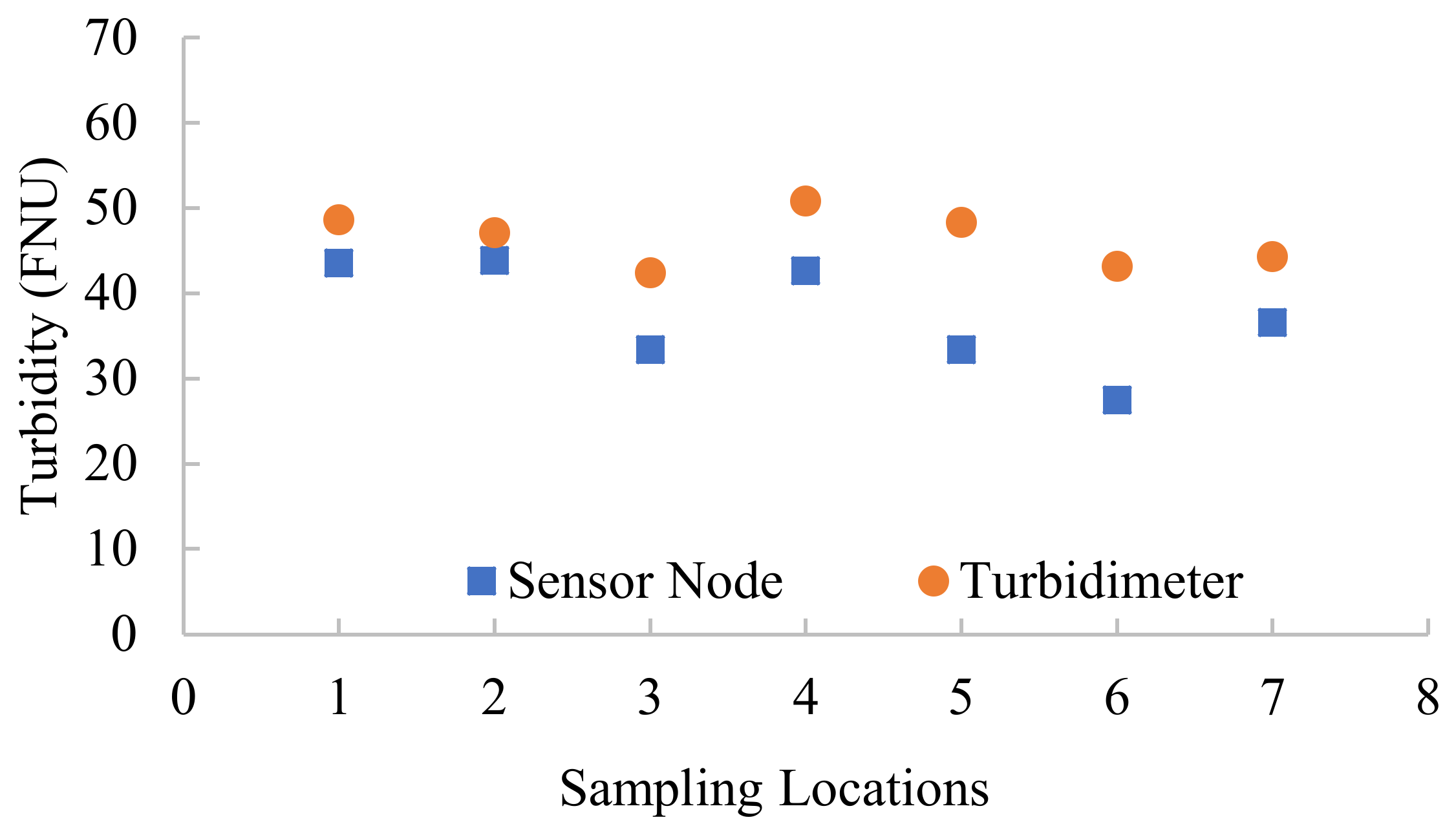
2.1.1. Turbidity Sensor Integration with the Sensor Node and Accuracy Assessment
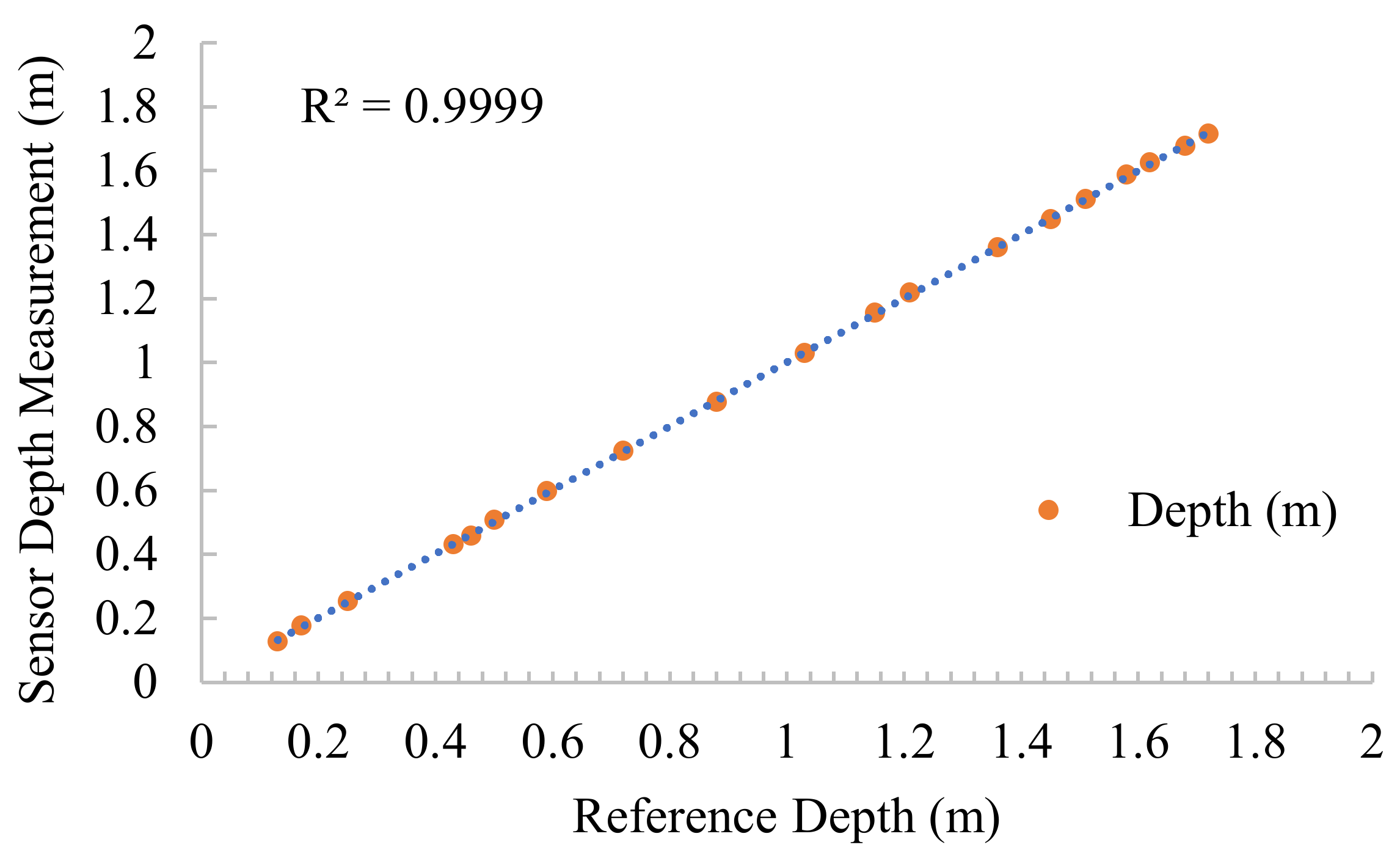
2.1.2. Depth Sensor Integration with the Sensor Node and Accuracy Assessment
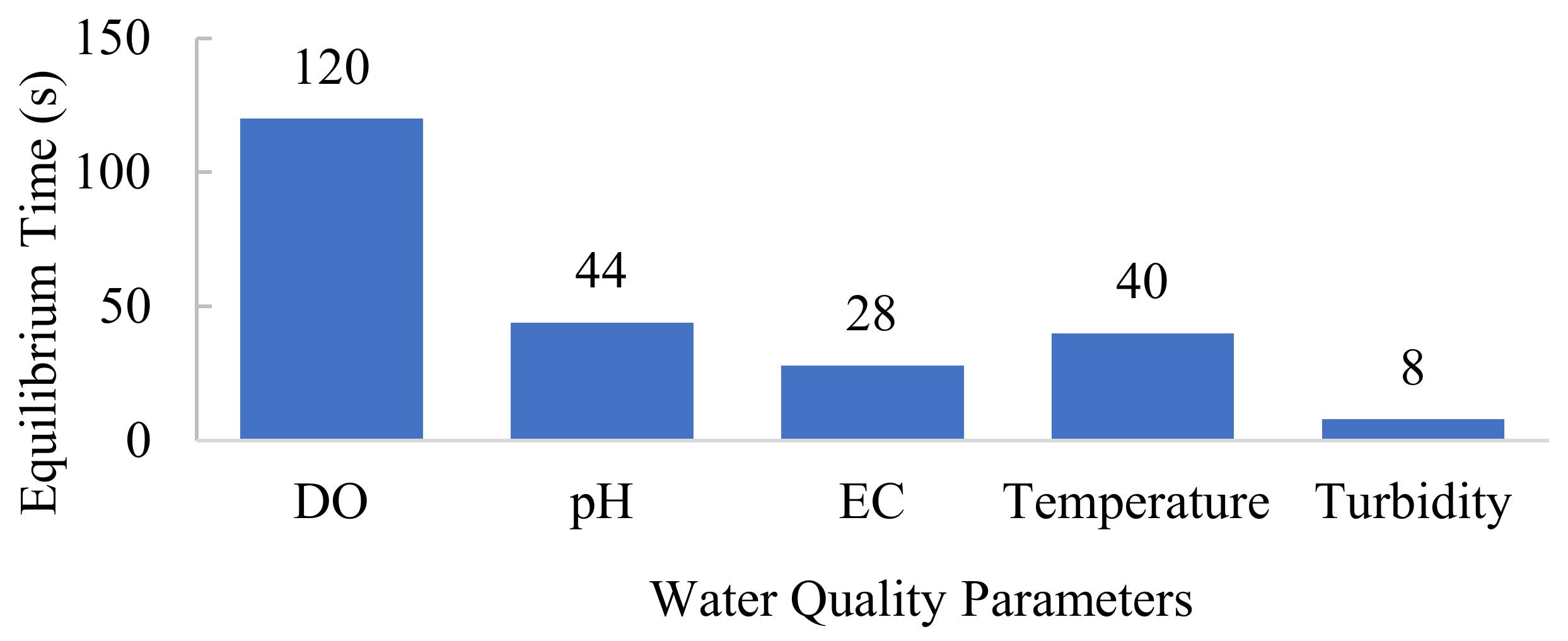
2.2. Evaluation of Sensor Node Stabilization Time
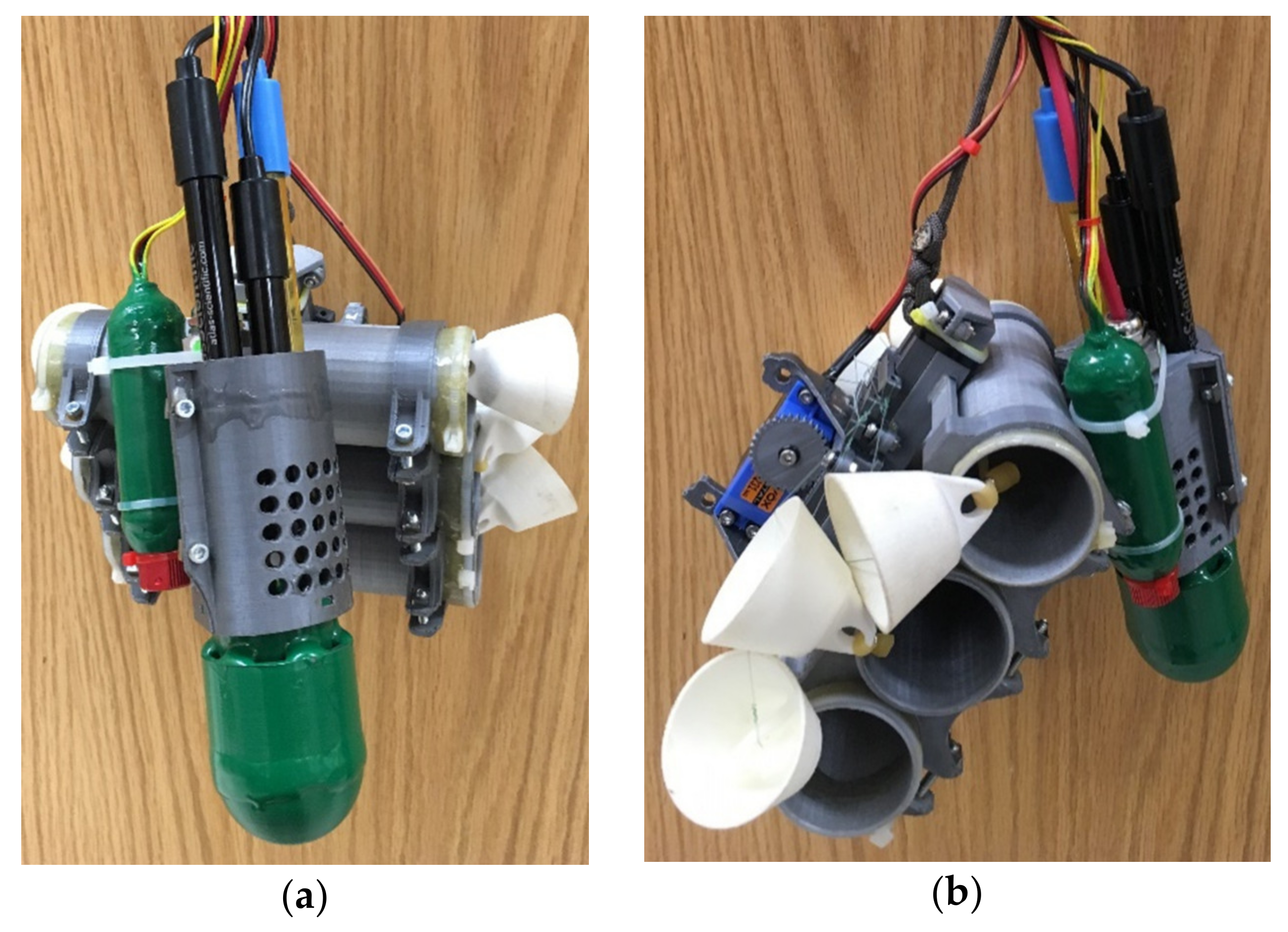
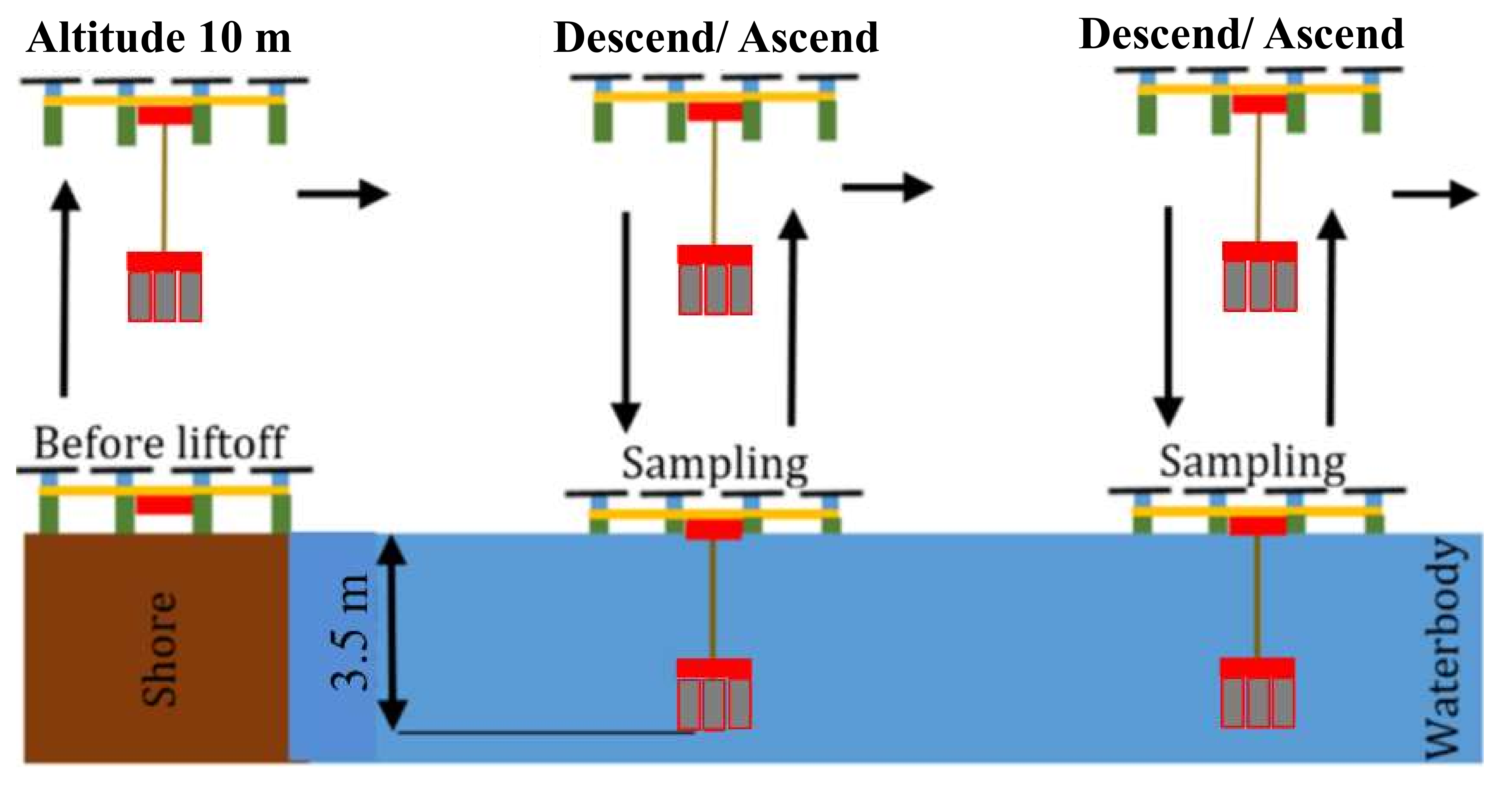
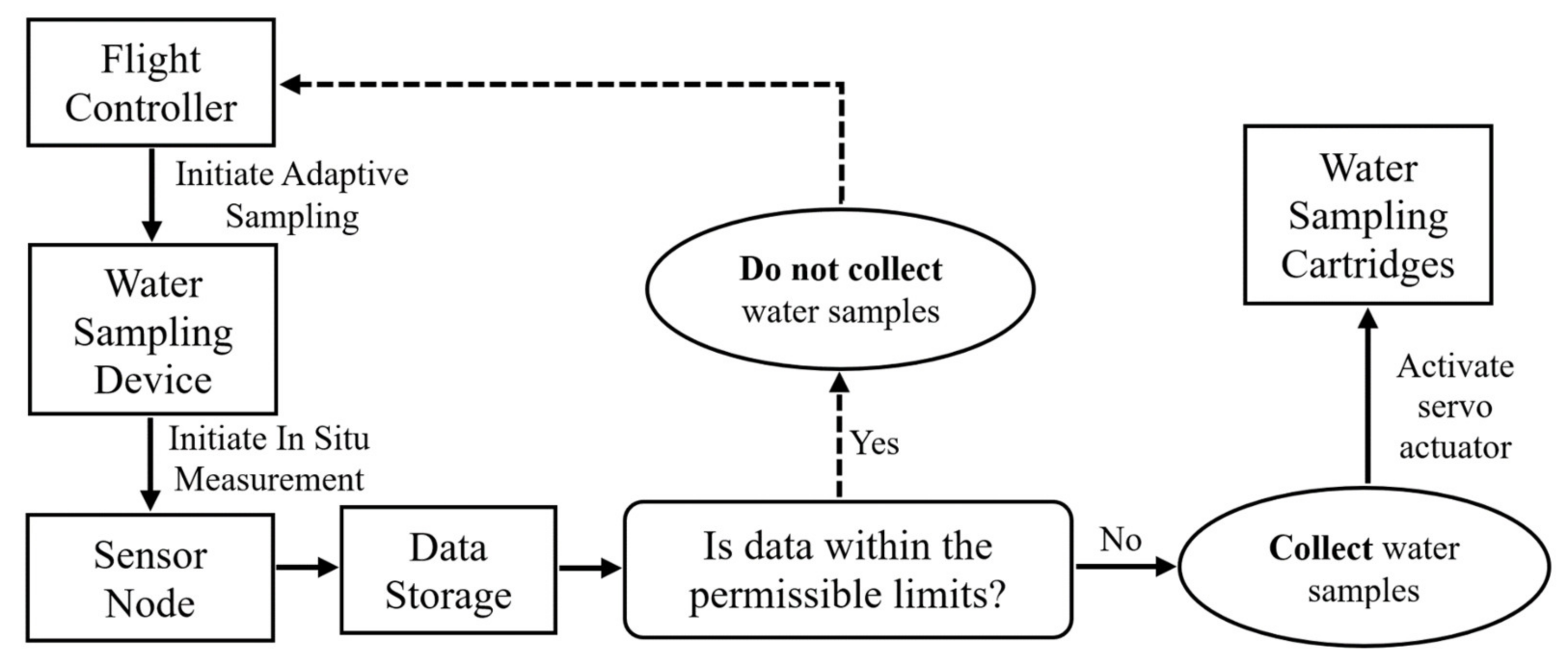
2.3. Water Sampling Device Self-Activation and Test Procedure
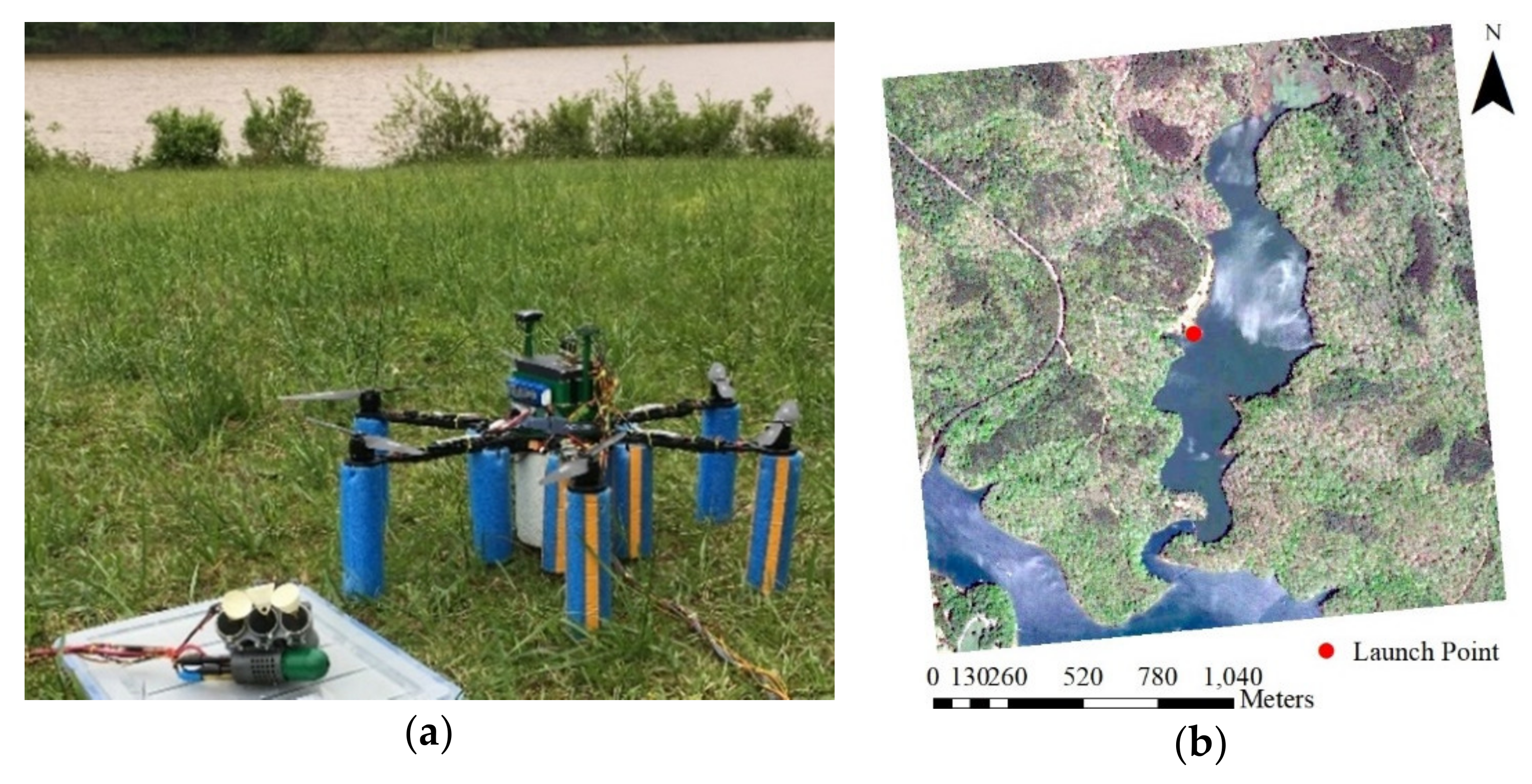
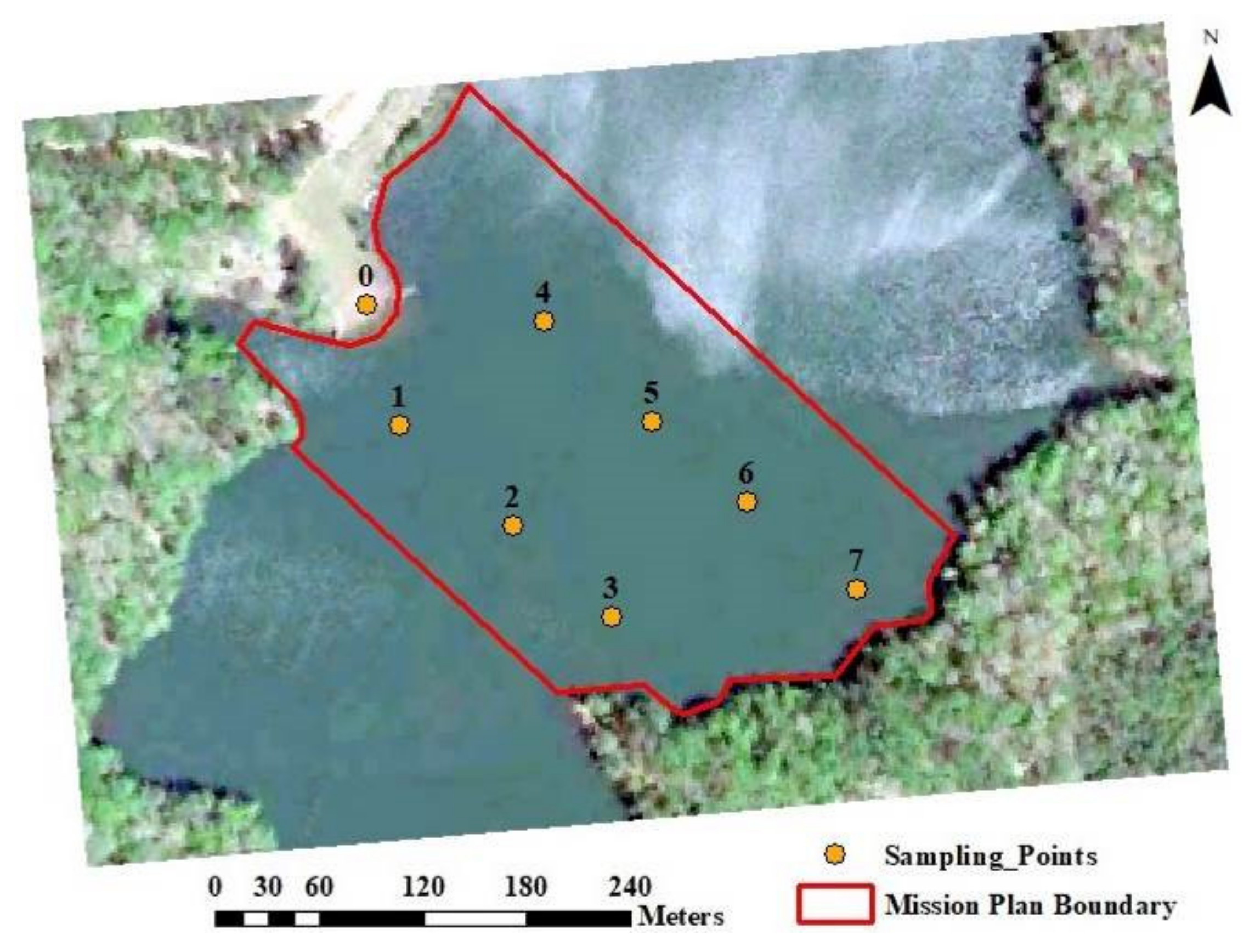
2.4. Experiment Site
2.5. Adaptive Water Sampling Data Collection
3. Results and Discussion
3.1. Accuracy Evaluation of Depth and Turbidity Sensors
3.2. Evaluation of Sensor Node Equilibrium Time
3.3. Self-Activation Trails of Adaptive Water Sampling
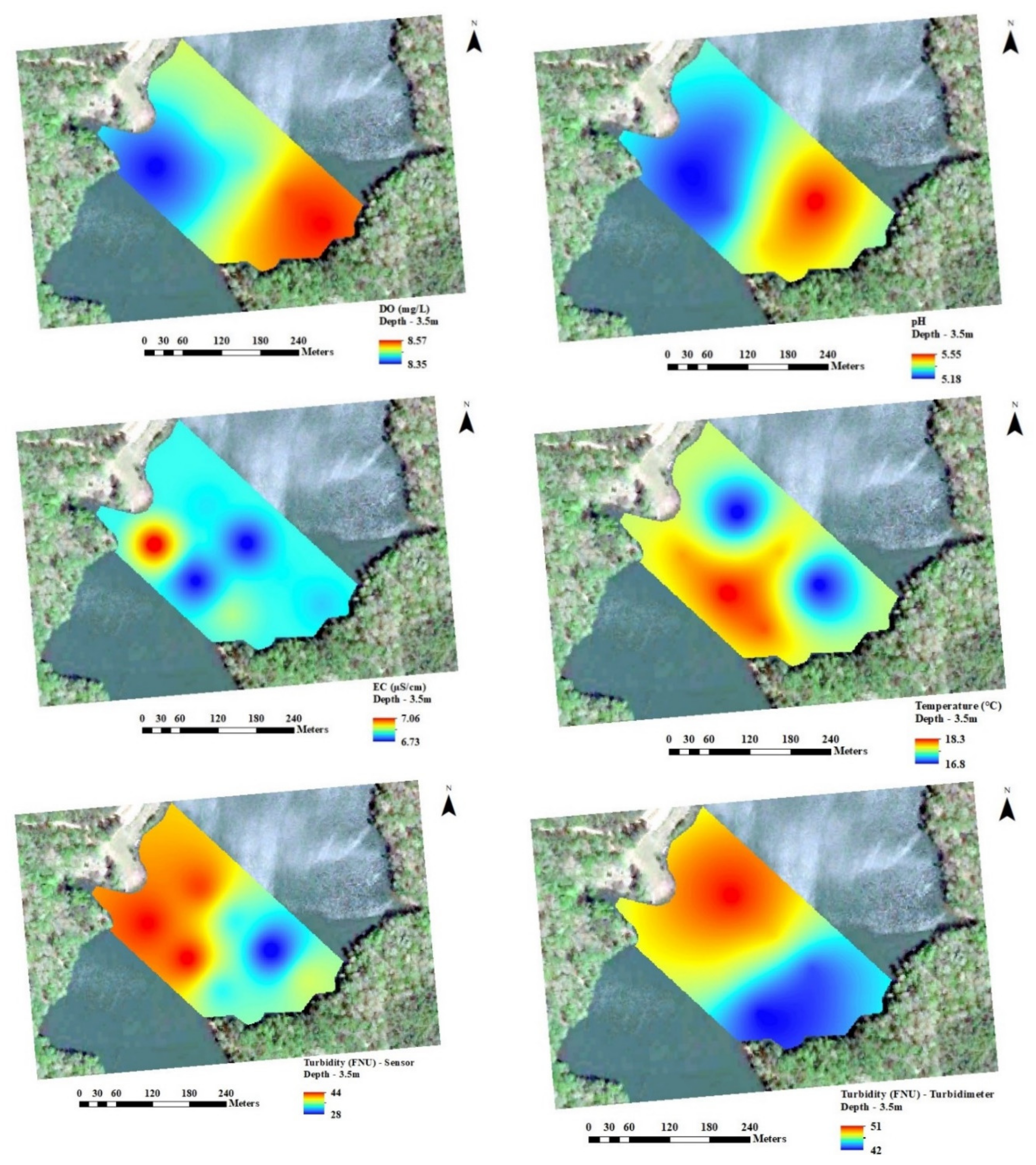
3.4. Water Quality Evaluation of Lake Issaqueena and Adaptive Water Sampling
4. Conclusions
Supplementary Materials
Author Contributions
Conflicts of Interest
References
- World Water Assesment Programme. The United Nations World Water Development Report 2017: Wastewater The Untapped Rescource; UNESCO: Paris, France, 2017. [Google Scholar]
- Berman, J. WHO: Waterborne Disease is World’s Leading Killer; Voice of America News: Washington, DC, USA, 2009. [Google Scholar]
- Hawthorne, J. Critical Facts about Waterborne Diseases in the United States and Abroad; Business Connect World: Grand Rapids, MI, USA, 2018. [Google Scholar]
- World Health Organization (WHO). Developing Drinking-Water Quality Regulations and Standards; General guidance with a special focus on countries with limited resources; World Health Organization: Copenhagen, Denmark, 2018. [Google Scholar]
- United States Centers for Disease Control and Prevention (CDC). Global Water, Sanitation, and Hygiene; Fast Facts; U.S. Department of Health and Human Services: Atlanta, GA, USA, 2016.
- Stauber, C.; Miller, C.; Cantrell, B.; Kroell, K. Evaluation of the compartment bag test for the detection of Escherichia coli in water. J. Microbiol. Methods 2014, 99, 66–70. [Google Scholar] [CrossRef]
- Pearse, J. Phytoplankton-nutrient relationships in South Carolina reservoirs: Implications for management strategies. Lake Reserv. Manag. 1984, 1, 193–197. [Google Scholar] [CrossRef]
- Shoda, M.E.; Sprague, L.A.; Murphy, J.C.; Riskin, M.L. Water-quality trends in U.S. rivers, 2002 to 2012: Relations to levels of concern. Sci. Total Environ. 2019, 650, 2314–2324. [Google Scholar] [CrossRef] [PubMed]
- Yang, K.; Yu, Z.; Luo, Y.; Yang, Y.; Zhao, L.; Zhou, X. Spatial and temporal variations in the relationship between lake water surface temperatures and water quality—A case study of Dianchi Lake. Sci. Total Environ. 2018, 624, 859–871. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Liu, S. Chapter 2-Wireless Sensor Networks in Water Quality Monitoring. In Water Quality Monitoring and Management; Li, D., Liu, S., Eds.; Academic Press: Cambridge, MA, USA, 2019; pp. 55–100. [Google Scholar] [CrossRef]
- Zhuang, Y.; Zhang, L.; Du, Y.; Yang, W.; Lihui, W.; Cai, X. Identification of critical source areas for nonpoint source pollution in the Danjiangkou Reservoir Basin, China. Lake Reserv. Manag. 2016, 32, 1–12. [Google Scholar] [CrossRef]
- Zhang, L.; Thomas, S.; Mitsch, W.J. Design of real-time and long-term hydrologic and water quality wetland monitoring stations in South Florida, USA. Ecol. Eng. 2017, 108, 446–455. [Google Scholar] [CrossRef]
- Chung, W.-Y.; Yoo, J.-H. Remote water quality monitoring in wide area. Sens. Actuators B Chem. 2015, 217, 51–57. [Google Scholar] [CrossRef]
- Xu, Z.; Dong, Q.; Otieno, B.; Liu, Y.; Williams, I.; Cai, D.; Li, Y.; Lei, Y.; Li, B. Real-time in situ sensing of multiple water quality related parameters using micro-electrode array (MEA) fabricated by inkjet-printing technology (IPT). Sens. Actuators B Chem. 2016, 237, 1108–1119. [Google Scholar] [CrossRef]
- Thomas, K.V.; Hurst, M.R.; Matthiessen, P.; Sheahan, D.; Williams, R.J. Toxicity characterisation of organic contaminants in stormwaters from an agricultural headwater stream in South East England. Water Res. 2001, 35, 2411–2416. [Google Scholar] [CrossRef]
- Peters, C.B.; Zhan, Y.; Schwartz, M.W.; Godoy, L.; Ballard, H.L. Trusting land to volunteers: How and why land trusts involve volunteers in ecological monitoring. Biol. Conserv. 2017, 208, 48–54. [Google Scholar] [CrossRef] [Green Version]
- Lewitus, A.J.; Schmidt, L.B.; Mason, L.J.; Kempton, J.W.; Wilde, S.B.; Wolny, J.L.; Williams, B.J.; Hayes, K.C.; Hymel, S.N.; Keppler, C.J.; et al. Harmful Algal Blooms in South Carolina Residential and Golf Course Ponds. Popul. Environ. 2003, 24, 387–413. [Google Scholar] [CrossRef]
- Winkelbauer, A.; Fuiko, R.; Krampe, J.; Winkler, S. Crucial elements and technical implementation of intelligent monitoring networks. Water Sci. Technol. 2014, 70, 1926–1933. [Google Scholar] [CrossRef] [PubMed]
- Winkler, S.; Zessner, M.; Saracevic, E.; Fleischmann, N. Intelligent monitoring networks—Transformation of data into information for water management. Water Sci. Technol. 2008, 58, 317–322. [Google Scholar] [CrossRef] [PubMed]
- Adu-Manu, K.S.; Tapparello, C.; Heinzelman, W.; Katsriku, F.A.; Abdulai, J.-D. Water Quality Monitoring Using Wireless Sensor Networks: Current Trends and Future Research Directions. ACM Trans. Sen. Netw. 2017, 13, 1–41. [Google Scholar] [CrossRef] [Green Version]
- Bin Omar, A.; Bin MatJafri, M. Turbidimeter design and analysis: A review on optical fiber sensors for the measurement of water turbidity. Sensors 2009, 9, 8311–8335. [Google Scholar] [CrossRef]
- Pule, M.; Yahya, A.; Chuma, J. Wireless sensor networks: A survey on monitoring water quality. J. Appl. Res. Technol. 2017, 15, 562–570. [Google Scholar] [CrossRef]
- Kozyra, A.; Skrzypczyk, K.; Stebel, K.; Rolnik, A.; Rolnik, P.; Kućma, M. Remote controlled water craft for water measurement. Measurement 2017, 111, 105–113. [Google Scholar] [CrossRef]
- Valada, A.; Velagapudi, P.; Kannan, B.; Tomaszewski, C.; Kantor, G.; Scerri, P. Development of a low cost multi-robot autonomous marine surface platform. In Proceedings of the Field and Service Robotic, Matsushima, Miyagi, Japan, 20–22 July 2011; pp. 643–658. [Google Scholar]
- Liu, Y.; Noguchi, N.; Yusa, T. Development of an Unmanned Surface Vehicle Platform for Autonomous Navigation in Paddy Field. IFAC Proc. Vol. 2014, 47, 11553–11558. [Google Scholar] [CrossRef] [Green Version]
- Dunbabin, M.; Grinham, A. Experimental evaluation of an Autonomous Surface Vehicle for water quality and greenhouse gas emission monitoring. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 4–8 May 2010; pp. 5268–5274. [Google Scholar]
- Melo, M.; Mota, F.; Albuquerque, V.; Alexandria, A. Development of a Robotic Airboat for Online Water Quality Monitoring in Lakes. Robotics 2019, 8, 19. [Google Scholar] [CrossRef] [Green Version]
- Kaizu, Y.; Iio, M.; Yamada, H.; Noguchi, N. Development of unmanned airboat for water-quality mapping. Biosyst. Eng. 2011, 109, 338–347. [Google Scholar] [CrossRef] [Green Version]
- Eichhorn, M.; Ament, C.; Jacobi, M.; Pfuetzenreuter, T.; Karimanzira, D.; Bley, K.; Boer, M.; Wehde, H. Modular AUV System with Integrated Real-Time Water Quality Analysis. Sensors 2018, 18, 1837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nagchaudhuri, A.; Diab, A.H.; Hartman, C.E.; Zhang, L.; Mitra, M.; Pachepsky, Y.; Joshi, R. STRIDER: Semi-Autonomous Tracking Robot with Instrumentation for Data-Acquisition and Environmental Research. In Proceedings of the ASEE Annual Conference & Exposition, New Orleans, LA, USA, 26–29 June 2016. [Google Scholar]
- Friedrichs, A.; Busch, J.A.; Van der Woerd, H.J.; Zielinski, O. SmartFluo: A Method and Affordable Adapter to Measure Chlorophyll a Fluorescence with Smartphones. Sensors 2017, 17, 678. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mayer, C.C.; Ali, K.A. Field Spectroscopy as a Tool for Enhancing Water Quality Monitoring in the ACE Basin, SC. J. South. Carol. Water Resour. 2017, 4, 41–55. [Google Scholar] [CrossRef] [Green Version]
- Leeuw, T.; Boss, E.S.; Wright, D.L. In situ Measurements of Phytoplankton Fluorescence Using Low Cost Electronics. Sensors 2013, 13, 7872–7883. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zeng, C.; Richardson, M.; King, D.J. The impacts of environmental variables on water reflectance measured using a lightweight unmanned aerial vehicle (UAV)-based spectrometer system. ISPRS J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Becker, R.H.; Sayers, M.; Dehm, D.; Shuchman, R.; Quintero, K.; Bosse, K.; Sawtell, R. Unmanned aerial system based spectroradiometer for monitoring harmful algal blooms: A new paradigm in water quality monitoring. J. Great Lakes Res. 2019, 45, 444–453. [Google Scholar] [CrossRef]
- Kislik, C.; Dronova, I.; Kelly, M. UAVs in Support of Algal Bloom Research: A Review of Current Applications and Future Opportunities. Drones 2018, 2, 35. [Google Scholar] [CrossRef] [Green Version]
- Erena, M.; Atenza, J.F.; García-Galiano, S.; Domínguez, J.A.; Bernabé, J.M. Use of Drones for the Topo-Bathymetric Monitoring of the Reservoirs of the Segura River Basin. Water 2019, 11, 445. [Google Scholar] [CrossRef] [Green Version]
- Rabta, B.; Wankmüller, C.; Reiner, G. A drone fleet model for last-mile distribution in disaster relief operations. Int. J. Disaster Risk Reduct. 2018, 28, 107–112. [Google Scholar] [CrossRef]
- Anweiler, S.; Piwowarski, D. Multicopter platform prototype for environmental monitoring. J. Clean. Prod. 2017, 155, 204–211. [Google Scholar] [CrossRef]
- Schaeffer, B.A.; Schaeffer, K.G.; Keith, D.; Lunetta, R.S.; Conmy, R.; Gould, R.W. Barriers to adopting satellite remote sensing for water quality management. Int. J. Remote Sens. 2013, 34, 7534–7544. [Google Scholar] [CrossRef]
- Esakki, B.; Ganesan, S.; Mathiyazhagan, S.; Ramasubramanian, K.; Gnanasekaran, B.; Son, B.; Park, S.W.; Choi, J.S. Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things. Sensors 2018, 18, 3318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ore, J.-P.; Detweiler, C. Sensing water properties at precise depths from the air. In Proceedings of the Field and Service Robotics, Zurich, Switzerland, 12–15 September 2017; pp. 205–220. [Google Scholar]
- Rodrigues, P.; Marques, F.; Pinto, E.; Pombeiro, R.; Lourenço, A.; Mendonça, R.; Santana, P.; Barata, J. An open-source watertight unmanned aerial vehicle for water quality monitoring. In Proceedings of the OCEANS’15 MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Koparan, C.; Koc, A.; Privette, C.; Sawyer, C. In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System. Water 2018, 10, 264. [Google Scholar] [CrossRef] [Green Version]
- Saiki, K.; Kaneko, K.; Ohba, T.; Ntchantcho, R.; Fouepe, A.; Kusakabe, M.; Tanyileke, G.; Hell, J.V. Vertical change in transparency of water at Lake Nyos, a possible indicator for the depth of chemocline. J. Afr. Earth Sci. 2019, 152, 122–127. [Google Scholar] [CrossRef]
- Ore, J.-P.; Detweiler, C. Sensing water properties at precise depths from the air. J. Field Robot. 2018, 35, 1205–1221. [Google Scholar] [CrossRef]
- Dörnhöfer, K.; Oppelt, N. Remote sensing for lake research and monitoring—Recent advances. Ecol. Indic. 2016, 64, 105–122. [Google Scholar] [CrossRef]
- Koparan, C.; Koc, A.; Privette, C.; Sawyer, C.; Sharp, J. Evaluation of a UAV-Assisted Autonomous Water Sampling. Water 2018, 10, 655. [Google Scholar] [CrossRef] [Green Version]
- Higgins, J.; Detweiler, C. The waterbug sub-surface sampler: Design, control and analysis. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 330–337. [Google Scholar]
- Castendyk, D.; Hill, B.; Filiatreault, P.; Straight, B.; Alangari, A.; Cote, P.; Leishman, W. Experiences with Autonomous Sampling of Pit Lakes in North America using Drone Aircraft and Drone Boats. In Proceedings of the 11th International Conference on Acid Rock Drainage and International Mine Water Association 2018 Annual Conference, International Network for Acid Prevention, Pretoria, South Africa, 10–14 September 2018; pp. 1036–1041. [Google Scholar]
- Banerjee, B.P.; Raval, S.; Maslin, T.J.; Timms, W. Development of a UAV-mounted system for remotely collecting mine water samples. Int. J. Min. Reclam. Environ. 2018, 1–12. [Google Scholar] [CrossRef]
- Ore, J.-P.; Elbaum, S.; Burgin, A.; Detweiler, C. Autonomous Aerial Water Sampling. J. Field Robot. 2015, 32, 1095–1113. [Google Scholar] [CrossRef] [Green Version]
- Lally, H.T.; O’Connor, I.; Jensen, O.P.; Graham, C.T. Can drones be used to conduct water sampling in aquatic environments? A review. Sci. Total Environ. 2019, 670, 569–575. [Google Scholar] [CrossRef]
- Glasgow, H.B.; Burkholder, J.M.; Reed, R.E.; Lewitus, A.J.; Kleinman, J.E. Real-time remote monitoring of water quality: A review of current applications, and advancements in sensor, telemetry, and computing technologies. J. Exp. Mar. Biol. Ecol. 2004, 300, 409–448. [Google Scholar] [CrossRef]
- Ankor, M.J.; Tyler, J.J.; Hughes, C.E. Development of an autonomous, monthly and daily, rainfall sampler for isotope research. J. Hydrol. 2019, 575, 31–41. [Google Scholar] [CrossRef]
- Py, F.; Ryan, J.; Rajan, K.; Sherman, A.; Bird, L.; Fox, M.; Long, D. Adaptive Water Sampling based on Unsupervised Clustering. In Proceedings of the AGU Fall Meeting 2007—Session on Past Climate Forcings, San Francisco, CA, USA, 10–14 December 2007. [Google Scholar]
- Kellner, K.; Ettenauer, J.; Zuser, K.; Posnicek, T.; Brandl, M. An automated, Robotic Biosensor for the Electrochemical Detection of E. Coli in Water. Procedia Eng. 2016, 168, 594–597. [Google Scholar] [CrossRef]
- Li, D.; Liu, S. Chapter 8—Water Quality Detection for Lakes. In Water Quality Monitoring and Management; Li, D., Liu, S., Eds.; Academic Press: Cambridge, MA, USA, 2019; pp. 221–231. [Google Scholar] [CrossRef]
- Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B. Autonomous In Situ Measurements of Noncontaminant Water Quality Indicators and Sample Collection with a UAV. Water 2019, 11, 604. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Liu, S. Chapter 1—Sensors in Water Quality Monitoring. In Water Quality Monitoring and Management; Li, D., Liu, S., Eds.; Academic Press: Cambridge, MA, USA, 2019; pp. 1–54. [Google Scholar] [CrossRef]
- Lawler, D.M. Turbidity, Turbidimetry, and Nephelometry. In Encyclopedia of Analytical Science, 3rd ed.; Worsfold, P., Poole, C., Townshend, A., Miró, M., Eds.; Academic Press: Oxford, UK, 2016; pp. 152–163. [Google Scholar] [CrossRef]
- Kumar, M.; Puri, A. A review of permissible limits of drinking water. Indian J. Occup. Environ. Med. 2012, 16, 40–44. [Google Scholar] [CrossRef] [Green Version]
- Stone, N.M.; Thomforde, H.K. Understanding Your Fish Pond Water Analysis Report; University of Arkansas: Pine Bluff, AR, USA, 2004. [Google Scholar]
- Bhatnagar, A.; Devi, P. Water quality guidelines for the management of pond fish culture. Int. J. Environ. Sci. 2013, 3, 1980. [Google Scholar]
- Pilgrim, C.M.; Mikhailova, E.A.; Post, C.J.; Hains, J.J. Spatial and temporal analysis of land cover changes and water quality in the Lake Issaqueena watershed, South Carolina. Environ. Monit. Assess. 2014, 186, 7617–7630. [Google Scholar] [CrossRef]
- SCDHEC. State of South Carolina Monitoring Strategy for Calender Year 2018. Available online: https://scdhec.gov/sites/default/files/docs/HomeAndEnvironment/Docs/Strategy.pdf (accessed on 22 January 2020).
- Ahmad, H.R.; Aziz, T.; Rehman, Z.R.; Saifullah. Chapter 15—Spatial Mapping of Metal-Contaminated Soils A2—Hakeem, Khalid Rehman. In Soil Remediation and Plants; Academic Press: San Diego, CA, USA, 2015; pp. 415–431. [Google Scholar]
- Garg, V.; Senthil Kumar, A.; Aggarwal, S.P.; Kumar, V.; Dhote, P.R.; Thakur, P.K.; Nikam, B.R.; Sambare, R.S.; Siddiqui, A.; Muduli, P.R.; et al. Spectral similarity approach for mapping turbidity of an inland waterbody. J. Hydrol. 2017, 550, 527–537. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Lower Limit | Higher Limit | Successful Self Activation | Failed Self Activation | Success Rate (%) |
|---|---|---|---|---|---|
| DO | 6 mg/L | 12 mg/L | 21 | 1 | 96 |
| pH | 6.5 | 9.5 | 20 | 2 | 91 |
| EC | 100 µS/cm | 2000 µS/cm | 21 | 1 | 96 |
| Temperature | 20 °C | 35 °C | 22 | 0 | 100 |
| Total | N/A | N/A | 84 | 4 | 96 |
| Sample Location | In Situ Measurements with WSD | Parameters Outside the Allowable Limits | Self-Activation of Cartridges | |||
|---|---|---|---|---|---|---|
| DO (mg/L) | pH | EC (µS/cm) | Temp (°C) | |||
| 1 | 8.18 | 5.08 | 7.52 | 18.21 | pH, EC, Temperature | Successful |
| 2 | 8.39 | 4.98 | 6.51 | 18.81 | pH, EC, Temperature | Successful |
| 3 | 8.55 | 5.59 | 6.96 | 18.49 | pH, EC, Temperature | Successful |
| 4 | 8.57 | 5.15 | 6.8 | 16.06 | pH, EC, Temperature | Successful |
| 5 | 8.27 | 5.37 | 6.49 | 18.26 | pH, EC, Temperature | Successful |
| 6 | 8.68 | 5.92 | 6.82 | 16.08 | pH, EC, Temperature | Successful |
| 7 | 8.64 | 5.28 | 6.77 | 17.31 | pH, EC, Temperature | Successful |
| Avg. | 8.47 | 5.34 | 7 | 18 | N/A | N/A |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B. Adaptive Water Sampling Device for Aerial Robots. Drones 2020, 4, 5. https://doi.org/10.3390/drones4010005
Koparan C, Koc AB, Privette CV, Sawyer CB. Adaptive Water Sampling Device for Aerial Robots. Drones. 2020; 4(1):5. https://doi.org/10.3390/drones4010005
Chicago/Turabian StyleKoparan, Cengiz, A. Bulent Koc, Charles V. Privette, and Calvin B. Sawyer. 2020. "Adaptive Water Sampling Device for Aerial Robots" Drones 4, no. 1: 5. https://doi.org/10.3390/drones4010005
APA StyleKoparan, C., Koc, A. B., Privette, C. V., & Sawyer, C. B. (2020). Adaptive Water Sampling Device for Aerial Robots. Drones, 4(1), 5. https://doi.org/10.3390/drones4010005