Measuring High Levels of Total Suspended Solids and Turbidity Using Small Unoccupied Aerial Systems (sUAS) Multispectral Imagery

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Site
2.2. sUAS Setup
2.3. Data Collection
2.4. Data Processing
2.5. Statistical Analysis
- RMSE = root mean square error;
- n = number of observations;
- i = a value in a dataset;
- Pi = predicted value;
- Oi = observed value;
- RPD = residual prediction deviation;
- = standard deviation of the observed variable;
- RMSEP = root mean square error of the predicted value;
- MNB = mean normalized bias.
3. Results
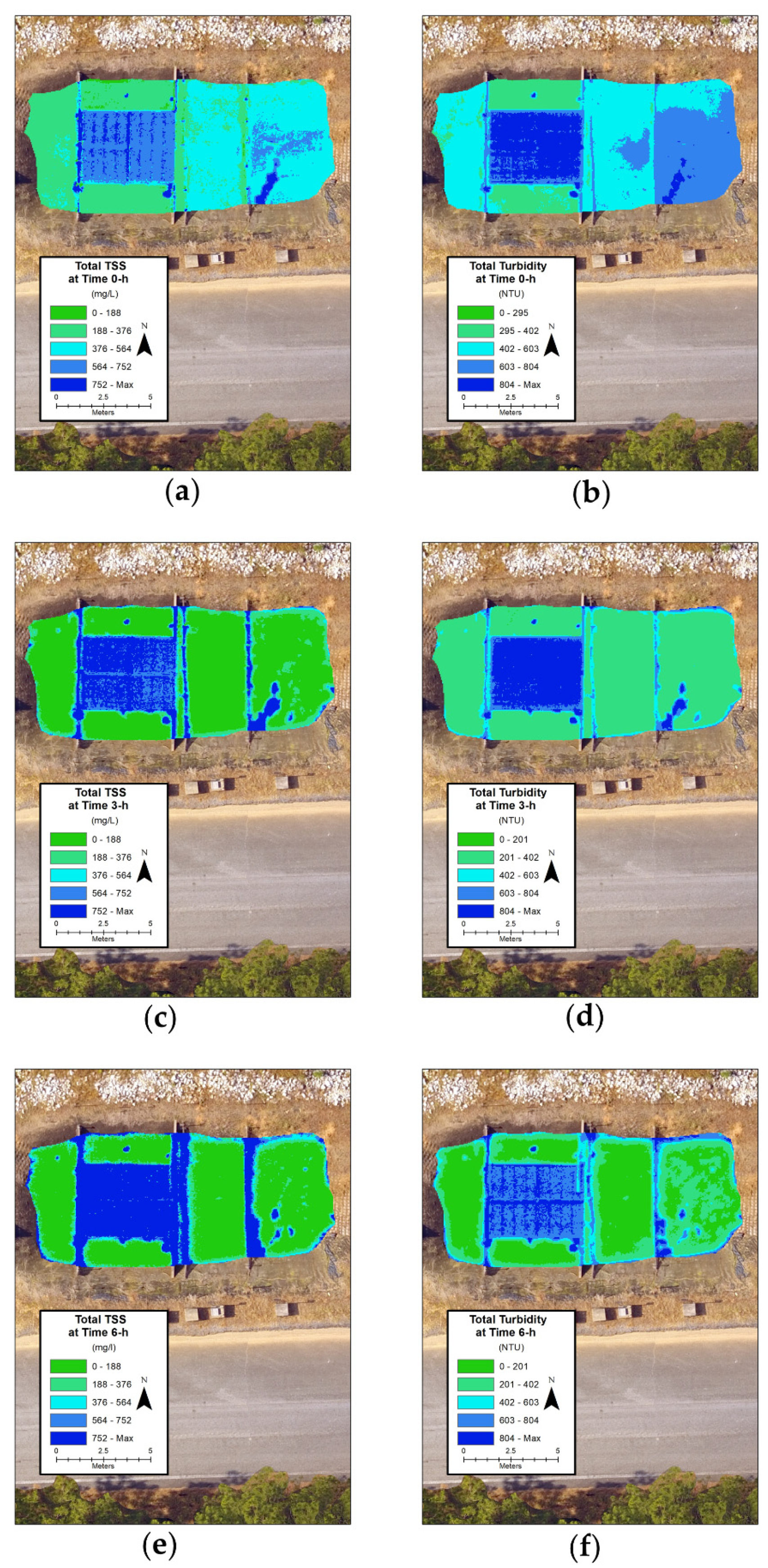
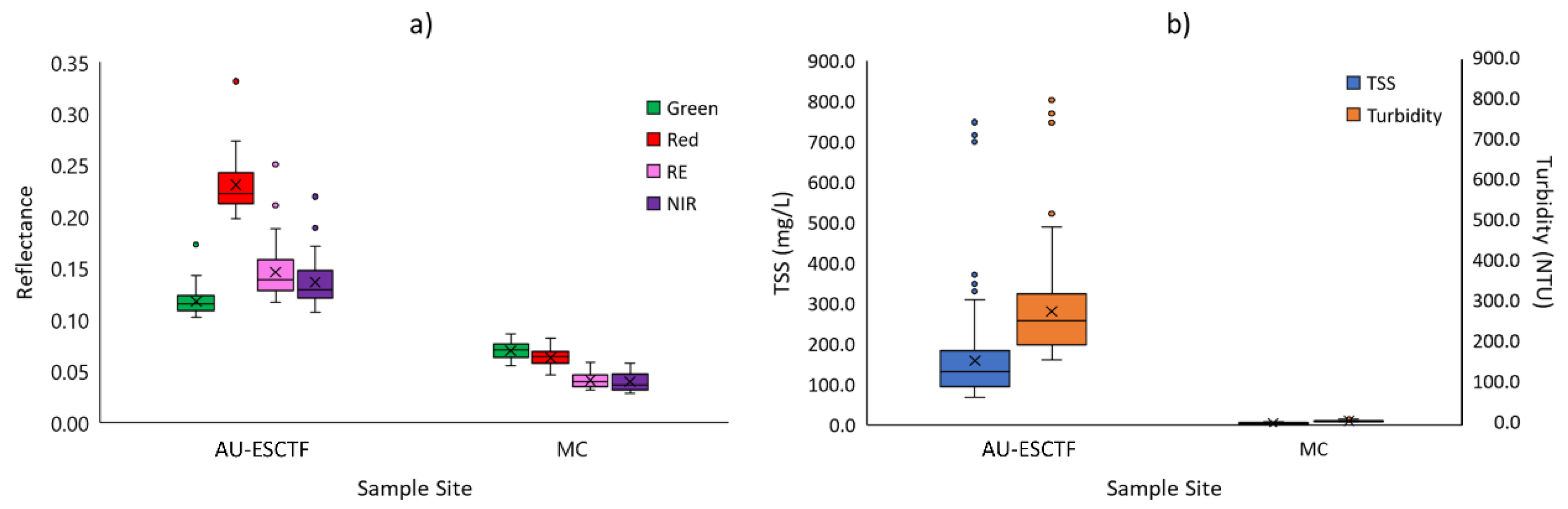
3.1. Turbidity and TSS
3.2. Regression Model Development
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Duda, A.M. Addressing nonpoint sources of water pollution must become an international priority. Water Sci. Technol. 1993, 28, 1–11. [Google Scholar] [CrossRef]
- NRCS. Urban Technical Note No. 1, Erosion and Sedimentation on Construction Sites. Agriculture. In Natural Resources Conservation Service Soil Quality; United States Department of Agriculture: Auburn, AL, USA, 2006. [Google Scholar]
- Rabení, C.; Jacobson, R.B. Warmwater Streams. In Inland Fisheries Management in North America; American Fisheries Society: Bethesda, MD, USA, 1999; pp. 505–528. [Google Scholar]
- USEPA. Construction Site Runoff Control Measure. In United States Environmental Protection Agency Stormwater Phase II Finale Rule; EPA Federal Register: Washington, DC, USA, 2005; Volume 833-F-00-008. [Google Scholar]
- Burton, G.; Gunnison, D.; Lanza, G.R. Survival of pathogenic bacteria in various freshwater sediments. Appl. Environ. Microbiol. 1987, 53, 633–638. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mitsch, W.J.; Reeder, B.C. Nutrient and hydrologic budgets of a Great Lakes coastal freshwater wetland during a drought year. Wetl. Ecol. Manag. 1992, 1, 211–222. [Google Scholar] [CrossRef]
- Wohl, E.; Bledsoe, B.P.; Jacobson, R.B.; Poff, N.L.; Rathburn, S.L.; Walters, D.M.; Wilcox, A.C. The natural sediment regime in rivers: Broadening the foundation for ecosystem management. BioScience 2015, 65, 358–371. [Google Scholar] [CrossRef] [Green Version]
- Lake, P.S.; Palmer, M.A.; Biro, P.; Cole, J.; Covich, A.P.; Dahm, C.; Gibert, J.; Goedkoop, W.; Martens, K.; Verhoeven, J. Global Change and the Biodiversity of Freshwater Ecosystems: Impacts on Linkages between Above-Sediment and Sediment Biota: All forms of anthropogenic disturbance—changes in land use, biogeochemical processes, or biotic addition or loss—not only damage the biota of freshwater sediments but also disrupt the linkages between above-sediment and sediment-dwelling biota. BioScience 2000, 50, 1099–1107. [Google Scholar]
- Pimentel, D.; Kounang, N. Ecology of soil erosion in ecosystems. Ecosystems 1998, 1, 416–426. [Google Scholar] [CrossRef]
- Walker, W.J.; McNutt, R.P.; Maslanka, C.K. The potential contribution of urban runoff to surface sediments of the Passaic River: Sources and chemical characteristics. Chemosphere 1999, 38, 363–377. [Google Scholar] [CrossRef]
- USEPA. United States Environmental Protection Agency National Pollutant Discharge Elimination System (NPDES); EPA Federal Register: Washington, DC, USA, 2010.
- USEPA. United States Environmental Protection Agency Construction General Permit (CGP)—Fact Sheet; EPA Federal Register: Washington, DC, USA, 2012.
- Perez, M.A.; Zech, W.C.; Vasconcelos, J.G.; Fang, X. Large-Scale Performance Testing of Temporary Sediment Basin Treatments and High-Rate Lamella Settlers. Water 2019, 11, 316. [Google Scholar] [CrossRef] [Green Version]
- Perez, M.A.; Zech, W.C.; Donald, W.N.; Turochy, R.; Fagan, B.G. Transferring Innovative Erosion and Sediment Control Research Results into Industry Practice. Water 2019, 11, 2549. [Google Scholar] [CrossRef] [Green Version]
- Fang, X.; Zech, W.; Logan, C. Stormwater field evaluation and its challenges of a sediment basin with skimmer and baffles at a highway construction site. Water 2015, 7, 3407–3430. [Google Scholar] [CrossRef]
- Zech, W.; Logan, C.; Fang, X. State of the practice: Evaluation of sediment basin design, construction, maintenance, and inspection procedures. Pract. Period. Struct. Des. Constr. 2014, 19, 04014006. [Google Scholar] [CrossRef] [Green Version]
- USEPA. Turbidity and Total Solids. In United States Environmental Protection Agency Voluntary Estuary Monitoring Manual; USEPA Office of Wetlands, Oceans, and Watersheds: Washington, DC, USA, 2006; Volume EPA-842-B-06-003. [Google Scholar]
- Tomsett, C.; Leyland, J. Remote sensing of river corridors: A review of current trends and future directions. River Res. Appl. 2019. [Google Scholar] [CrossRef]
- Umar, M.; Rhoads, B.L.; Greenberg, J.A. Use of multispectral satellite remote sensing to assess mixing of suspended sediment downstream of large river confluences. J. Hydrol. 2018, 556, 325–338. [Google Scholar] [CrossRef]
- Becker, R.H.; Sayers, M.; Dehm, D.; Shuchman, R.; Quintero, K.; Bosse, K.; Sawtell, R. Unmanned aerial system based spectroradiometer for monitoring harmful algal blooms: A new paradigm in water quality monitoring. J. Great Lakes Res. 2019, 45, 444–453. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Nowak, M.M.; Dziób, K.; Bogawski, P. Unmanned Aerial Vehicles (UAVs) in environmental biology: A review. Eur. J. Ecol. 2019, 4, 56–74. [Google Scholar] [CrossRef]
- Simic Milas, A.; Sousa, J.J.; Warner, T.A.; Teodoro, A.C.; Peres, E.; Gonçalves, J.A.; Delgado Garcia, J.; Bento, R.; Phinn, S.; Woodget, A. Unmanned Aerial Systems (UAS) for environmental applications special issue preface. Int. J. Remote Sens. 2018, 39, 4845–4851. [Google Scholar] [CrossRef]
- Briggs, M.A.; Dawson, C.B.; Holmquist-Johnson, C.L.; Williams, K.H.; Lane, J.W. Efficient hydrogeological characterization of remote stream corridors using drones. Hydrol. Process. 2018, 33. [Google Scholar] [CrossRef] [Green Version]
- Fitch, K.; Kelleher, C.; Caldwell, S.; Joyce, I. Airborne thermal infrared videography of stream temperature anomalies from a small unoccupied aerial system. Hydrol. Process. 2018, 32, 2616–2619. [Google Scholar] [CrossRef]
- Lega, M.; Kosmatka, J.; Ferrara, C.; Russo, F.; Napoli, R.; Persechino, G. Using advanced aerial platforms and infrared thermography to track environmental contamination. Environ. Forensics 2012, 13, 332–338. [Google Scholar] [CrossRef]
- Lega, M.; Napoli, R.M. Aerial infrared thermography in the surface waters contamination monitoring. Desalin. Water Treat. 2010, 23, 141–151. [Google Scholar] [CrossRef]
- Su, T.-C. A study of a matching pixel by pixel (MPP) algorithm to establish an empirical model of water quality mapping, as based on unmanned aerial vehicle (UAV) images. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 213–224. [Google Scholar] [CrossRef]
- Vogt, M.C.; Vogt, M.E. Near-remote sensing of water turbidity using small unmanned aircraft systems. Environ. Pract. 2016, 18, 18–31. [Google Scholar] [CrossRef]
- Larson, M.D.; Simic Milas, A.; Vincent, R.K.; Evans, J.E. Multi-depth suspended sediment estimation using high-resolution remote-sensing UAV in Maumee River, Ohio. Int. J. Remote Sens. 2018, 39, 5472–5489. [Google Scholar] [CrossRef]
- Ehmann, K.; Kelleher, C.; Condon, L.E. Monitoring turbidity from above: Deploying small unoccupied aerial vehicles to image in-stream turbidity. Hydrol. Process. 2019, 33, 1013–1021. [Google Scholar] [CrossRef]
- Prior, E.M.; O’Donnell, F.C.; Brodbeck, C.; Runion, G.B.; Shepherd, S.L. Investigating small unoccupied aerial systems (sUAS) multispectral imagery for total suspended solids and turbidity monitoring in small streams. Int. J. Remote Sens. 2020, 1–26. [Google Scholar] [CrossRef]
- Perez, M.; Zech, W.; Fang, X.; Vasconcelos, J. Methodology and development of a large-scale sediment basin for performance testing. J. Irrig. Drain. Eng. 2016, 142, 04016042. [Google Scholar] [CrossRef]
- Poncet, A.M.; Knappenberger, T.; Brodbeck, C.; Fogle, M.; Shaw, J.N.; Ortiz, B.V. Multispectral UAS Data Accuracy for Different Radiometric Calibration Methods. Remote Sens. 2019, 11, 1917. [Google Scholar] [CrossRef] [Green Version]
- DJI. DJI Phantom 4 Specs. Available online: https://www.dji.com/phantom-4/info#downloads (accessed on 8 December 2019).
- Datasheet: The Multi-Band Sensor Designed for Agriculture. Available online: https://tecnitop.com/wp-content/uploads/2015/10/Sequoia_Datasheet.pdf (accessed on 3 May 2020).
- Gauci, A.A.; Brodbeck, C.J.; Poncet, A.M.; Knappenberger, T. Assessing the Geospatial Accuracy of Aerial Imagery Collected with Various UAS Platforms. Am. Soc. Agric. Biol. Eng. 2018. [Google Scholar] [CrossRef]
- USEPA. Method 160.2: Nonfilterable (Suspended Solids), Water. In United States Environmental Protection Agency Standard Operating Procedure for the Analysis of Residue; EPA Federal Register: Washington, DC, USA, 1971. [Google Scholar]
- USEPA. Method 180.1: Determination of Turbidity by Nephelometry. In United States Environmental Protection Agency; EPA Federal Register: Washington, DC, USA, 1993. [Google Scholar]
- Iqbal, F.; Lucieer, A.; Barry, K. Simplified radiometric calibration for UAS-mounted multispectral sensor. Eur. J. Remote Sens. 2018, 51, 301–313. [Google Scholar] [CrossRef]
- SAS Institute Inc. SAS User’s Guide: Basics; SAS: Cary, NC, USA, 1982; p. 923. [Google Scholar]
- SAS Institute Inc. SAS User’s Guide: Statistics; SAS: Cary, NC, USA, 1985; p. 956. [Google Scholar]
- Lodhi, M.A.; Rundquist, D.C.; Han, L.; Kuzila, M.S. Estimation of suspended sediment concentration in water using integrated surface reflectance. Geocarto Int. 1998, 13, 11–15. [Google Scholar] [CrossRef]
- Shen, F.; Suhyb Salama, M.; Zhou, Y.-X.; Li, J.-F.; Su, Z.; Kuang, D.-B. Remote-sensing reflectance characteristics of highly turbid estuarine waters—A comparative experiment of the Yangtze River and the Yellow River. Int. J. Remote Sens. 2010, 31, 2639–2654. [Google Scholar] [CrossRef]
- Doxaran, D.; Froidefond, J.-M.; Castaing, P. Remote-sensing reflectance of turbid sediment-dominated waters. Reduction of sediment type variations and changing illumination conditions effects by use of reflectance ratios. Appl. Opt. 2003, 42, 2623–2634. [Google Scholar] [CrossRef] [PubMed]
- Sokoletsky, L.; Fang, S.; Yang, X.; Wei, X. Evaluation of empirical and semianalytical spectral reflectance models for surface suspended sediment concentration in the highly variable estuarine and coastal waters of East China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5182–5192. [Google Scholar] [CrossRef]
- Pereira, L.S.; Andes, L.C.; Cox, A.L.; Ghulam, A. Measuring Suspended-Sediment Concentration and Turbidity in the Middle Mississippi and Lower Missouri Rivers Using Landsat Data. JAWRA J. Am. Water Resour. Assoc. 2018, 54, 440–450. [Google Scholar] [CrossRef]
- Chen, Z.; Hu, C.; Muller-Karger, F. Monitoring turbidity in Tampa Bay using MODIS/Aqua 250-m imagery. Remote Sens. Environ. 2007, 109, 207–220. [Google Scholar] [CrossRef]
- Chang, C.-W.; Laird, D.A.; Mausbach, M.J.; Hurburgh, C.R. Near-infrared reflectance spectroscopy–principal components regression analyses of soil properties. Soil Sci. Soc. Am. J. 2001, 65, 480–490. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft | Sensor | Band Span (nm) | ||
|---|---|---|---|---|
| Weight (g) | 1380 | 72 | Green: | 480 to 520 |
| Red: | 640 to 680 | |||
| Size (mm) | 350 | 59 × 41 × 28 | Red Edge: | 730 to 810 |
| Near-infrared: | 770 to 810 | |||
| Sampling Location Closest to the Inlet | ||||||||||
| Time (h) | Green | Red | RE | NIR | TSS Surface (mg/L) | Turbidity Surface (NTU) | TSS Middle (mg/L) | Turbidity Middle (NTU) | TSS Bottom (mg/L) | Turbidity Bottom (NTU) |
| 0.25 | 0.1067 | 0.2428 | 0.2503 | 0.2193 | 748.4 | 803.78 | 716.8 | 746.55 | 699.6 | 769.65 |
| 0.75 | 0.1274 | 0.2648 | 0.1880 | 0.1714 | 278.4 | 417.38 | 309.2 | 441.53 | 329.2 | 522.38 |
| 1.00 | 0.1275 | 0.2595 | 0.1858 | 0.1708 | 225.6 | 392.70 | 250.8 | 391.13 | 294.0 | 442.58 |
| 1.25 | 0.1162 | 0.2407 | 0.1632 | 0.1505 | 175.2 | 379.58 | 228.0 | 374.33 | 232.4 | 411.60 |
| 1.50 | 0.1141 | 0.2355 | 0.1608 | 0.1514 | 204.4 | 315.00 | 208.8 | 333.90 | 212.8 | 373.80 |
| 1.75 | 0.1071 | 0.2196 | 0.1434 | 0.1310 | 172.8 | 295.58 | 190.8 | 319.20 | 212.4 | 352.80 |
| 2.00 | 0.1157 | 0.2293 | 0.1497 | 0.1401 | 155.6 | 284.55 | 184.4 | 322.88 | 201.6 | 347.55 |
| 2.25 | 0.1146 | 0.2235 | 0.1439 | 0.1388 | 143.2 | 270.90 | 178.0 | 307.13 | 188.8 | 345.45 |
| 2.50 | 0.1123 | 0.2198 | 0.1422 | 0.1312 | 128.0 | 253.58 | 163.2 | 281.93 | 187.2 | 358.05 |
| 2.75 | 0.1071 | 0.2055 | 0.1341 | 0.1273 | 102.0 | 233.10 | 158.8 | 287.18 | 162.0 | 353.85 |
| 3.00 | 0.1079 | 0.2069 | 0.1309 | 0.1230 | 110.0 | 217.35 | 142.8 | 270.38 | 178.0 | 323.93 |
| 3.25 | 0.1023 | 0.1980 | 0.1268 | 0.1222 | 98.0 | 206.64 | 130.4 | 250.95 | 170.0 | 302.93 |
| 3.50 | 0.1058 | 0.2082 | 0.1293 | 0.1270 | 86.8 | 193.04 | 106.4 | 260.40 | 168.8 | 308.18 |
| 3.75 | 0.1084 | 0.2143 | 0.1323 | 0.1294 | 85.2 | 186.17 | 134.0 | 250.43 | 158.0 | 318.15 |
| 4.00 | 0.1066 | 0.2137 | 0.1293 | 0.1268 | 66.4 | 171.36 | 129.6 | 254.63 | 137.6 | 301.88 |
| 4.75 | 0.1427 | 0.2729 | 0.1787 | 0.1503 | 78.0 | 162.28 | 112.8 | 225.75 | 141.6 | 266.70 |
| 5.00 | 0.1055 | 0.2089 | 0.1276 | 0.1182 | 77.6 | 163.96 | 110.4 | 215.78 | 144.0 | 273.00 |
| 5.50 | 0.1231 | 0.2352 | 0.1386 | 0.1370 | 73.6 | 169.42 | 105.2 | 215.25 | 136.0 | 260.93 |
| 5.75 | 0.1152 | 0.2465 | 0.1393 | 0.1364 | 72.4 | 161.12 | 101.2 | 209.58 | 133.2 | 269.33 |
| 6.00 | 0.1200 | 0.2020 | 0.1271 | 0.1201 | 68.0 | 169.58 | 101.6 | 195.72 | 128.4 | 270.38 |
| Sampling Location Furthest from the Inlet | ||||||||||
| Time (h) | Green | Red | RE | NIR | TSS Surface (mg/L) | Turbidity Surface (NTU) | TSS Middle (mg/L) | Turbidity Middle (NTU) | TSS Bottom (mg/L) | Turbidity Bottom (NTU) |
| 0.25 | 0.1215 | 0.2659 | 0.2111 | 0.1888 | 296.8 | 399.00 | 371.2 | 486.68 | 348.4 | 488.00 |
| 0.75 | 0.1259 | 0.2669 | 0.1716 | 0.1588 | 182.4 | 322.35 | 244.8 | 404.78 | 270.0 | 405.60 |
| 1.00 | 0.1297 | 0.2631 | 0.1694 | 0.1575 | 164.0 | 277.73 | 218.4 | 364.35 | 225.6 | 348.80 |
| 1.25 | 0.1154 | 0.2335 | 0.1402 | 0.1287 | 135.2 | 267.75 | 189.2 | 343.35 | 209.6 | 340.00 |
| 1.50 | 0.1157 | 0.2363 | 0.1488 | 0.1404 | 130.4 | 246.75 | 162.8 | 300.83 | 186.8 | 317.20 |
| 1.75 | 0.1097 | 0.2174 | 0.1345 | 0.1236 | 125.6 | 251.48 | 142.4 | 270.90 | 182.8 | 322.00 |
| 2.00 | 0.1161 | 0.2260 | 0.1393 | 0.1303 | 117.6 | 224.70 | 132.0 | 254.10 | 165.6 | 299.60 |
| 2.25 | 0.1169 | 0.2240 | 0.1391 | 0.1354 | 114.8 | 240.45 | 114.0 | 241.50 | 153.2 | 309.60 |
| 2.50 | 0.1161 | 0.2204 | 0.1318 | 0.1229 | 104.0 | 218.40 | 112.8 | 217.88 | 142.0 | 278.80 |
| 2.75 | 0.1142 | 0.2188 | 0.1287 | 0.1188 | 86.8 | 206.59 | 104.0 | 217.88 | 127.6 | 268.00 |
| 3.00 | 0.1100 | 0.2052 | 0.1238 | 0.1162 | 84.8 | 211.37 | 100.0 | 202.65 | 117.2 | 229.60 |
| 3.25 | 0.1056 | 0.2041 | 0.1205 | 0.1125 | 94.8 | 191.99 | 101.2 | 197.66 | 104.8 | 209.20 |
| 3.50 | 0.1105 | 0.2165 | 0.1252 | 0.1172 | 82.4 | 183.02 | 98.0 | 198.35 | 102.8 | 224.40 |
| 3.75 | 0.1114 | 0.2125 | 0.1248 | 0.1189 | 80.4 | 195.98 | 95.6 | 202.97 | 100.0 | 213.20 |
| 4.00 | 0.1101 | 0.2132 | 0.1203 | 0.1137 | 90.0 | 185.69 | 92.4 | 179.81 | 95.2 | 200.00 |
| 4.25 | 0.1725 | 0.3314 | 0.1628 | 0.1636 | 82.4 | 187.32 | 87.6 | 194.46 | 84.4 | 191.60 |
| 5.00 | 0.1098 | 0.2090 | 0.1163 | 0.1070 | 78.0 | 177.40 | 89.2 | 181.76 | 83.2 | 186.80 |
| 5.50 | 0.1271 | 0.2303 | 0.1266 | 0.1183 | 76.0 | 183.02 | 80.4 | 174.62 | 83.2 | 186.80 |
| 5.75 | 0.1295 | 0.2630 | 0.1432 | 0.1274 | 71.2 | 167.84 | 78.8 | 170.73 | 79.6 | 178.00 |
| 6.00 | 0.1385 | 0.2136 | 0.1319 | 0.1241 | 70.0 | 161.39 | 78.4 | 170.10 | 78.4 | 170.00 |
 0th percentile 100th percentile | ||||||||||
| TSS | Band | RE/G | NIR/G | NIR/R | RE/R | Intercept | Sample Size, n | r² | RMSE | RPD | MNB (%) |
| r value | 0.950 | 0.932 | 0.898 | 0.929 | –319.760 | 60 | 0.93 | 30.7 | 3.6 | 4.2 | |
| p value | <.0001 | <0.0001 | <0.0001 | <0.0001 | |||||||
| Coefficient | 7935.402 | –8115.633 | 15,933.000 | –14,837.000 | |||||||
| Turbidity | Band | RE/G | NIR/G | NIR/R | RE/R | Intercept | Sample Size, n | r² | RMSE | RPD | MNB (%) |
| r value | 0.920 | 0.913 | 0.874 | 0.893 | –328.016 | 60 | 0.85 | 44.6 | 2.5 | 2.9 | |
| p value | <0.0001 | <0.0001 | <0.0001 | <0.0001 | |||||||
| Coefficient | 1656.912 | –1352.279 | 2967.325 | –2588.921 | |||||||
| Averaged TSS | Band | RE/G | NIR/G | NIR/R | RE/R | Intercept | Sample Size, n | r² | RMSE | RPD | MNB (%) |
| r value | 0.969 | 0.951 | 0.916 | 0.948 | –319.775 | 20 | 0.97 | 21.8 | 5.0 | 1.5 | |
| p value | <0.0001 | <0.0001 | <0.0001 | <0.0001 | |||||||
| Coefficient | 7932.678 | –8112.650 | 15,927.000 | –14,831.000 | |||||||
| Averaged Turbidity | Band | RE/G | NIR/G | NIR/R | RE/R | Intercept | Sample Size, n | r² | RMSE | RPD | MNB (%) |
| r value | 0.961 | 0.953 | 0.913 | 0.933 | –328.013 | 20 | 0.93 | 30.9 | 3.5 | 1.2 | |
| p value | <0.0001 | <0.0001 | <0.0001 | <0.0001 | |||||||
| Coefficient | 1657.235 | –1352.618 | 2968.020 | –2589.587 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prior, E.M.; O’Donnell, F.C.; Brodbeck, C.; Donald, W.N.; Runion, G.B.; Shepherd, S.L. Measuring High Levels of Total Suspended Solids and Turbidity Using Small Unoccupied Aerial Systems (sUAS) Multispectral Imagery. Drones 2020, 4, 54. https://doi.org/10.3390/drones4030054
Prior EM, O’Donnell FC, Brodbeck C, Donald WN, Runion GB, Shepherd SL. Measuring High Levels of Total Suspended Solids and Turbidity Using Small Unoccupied Aerial Systems (sUAS) Multispectral Imagery. Drones. 2020; 4(3):54. https://doi.org/10.3390/drones4030054
Chicago/Turabian StylePrior, Elizabeth M., Frances C. O’Donnell, Christian Brodbeck, Wesley N. Donald, George Brett Runion, and Stephanie L. Shepherd. 2020. "Measuring High Levels of Total Suspended Solids and Turbidity Using Small Unoccupied Aerial Systems (sUAS) Multispectral Imagery" Drones 4, no. 3: 54. https://doi.org/10.3390/drones4030054
APA StylePrior, E. M., O’Donnell, F. C., Brodbeck, C., Donald, W. N., Runion, G. B., & Shepherd, S. L. (2020). Measuring High Levels of Total Suspended Solids and Turbidity Using Small Unoccupied Aerial Systems (sUAS) Multispectral Imagery. Drones, 4(3), 54. https://doi.org/10.3390/drones4030054