
Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G

 ,
,  ,
,  and
and
Abstract
:1. Introduction
1.1. Related Work
1.2. Motivation and Contributions
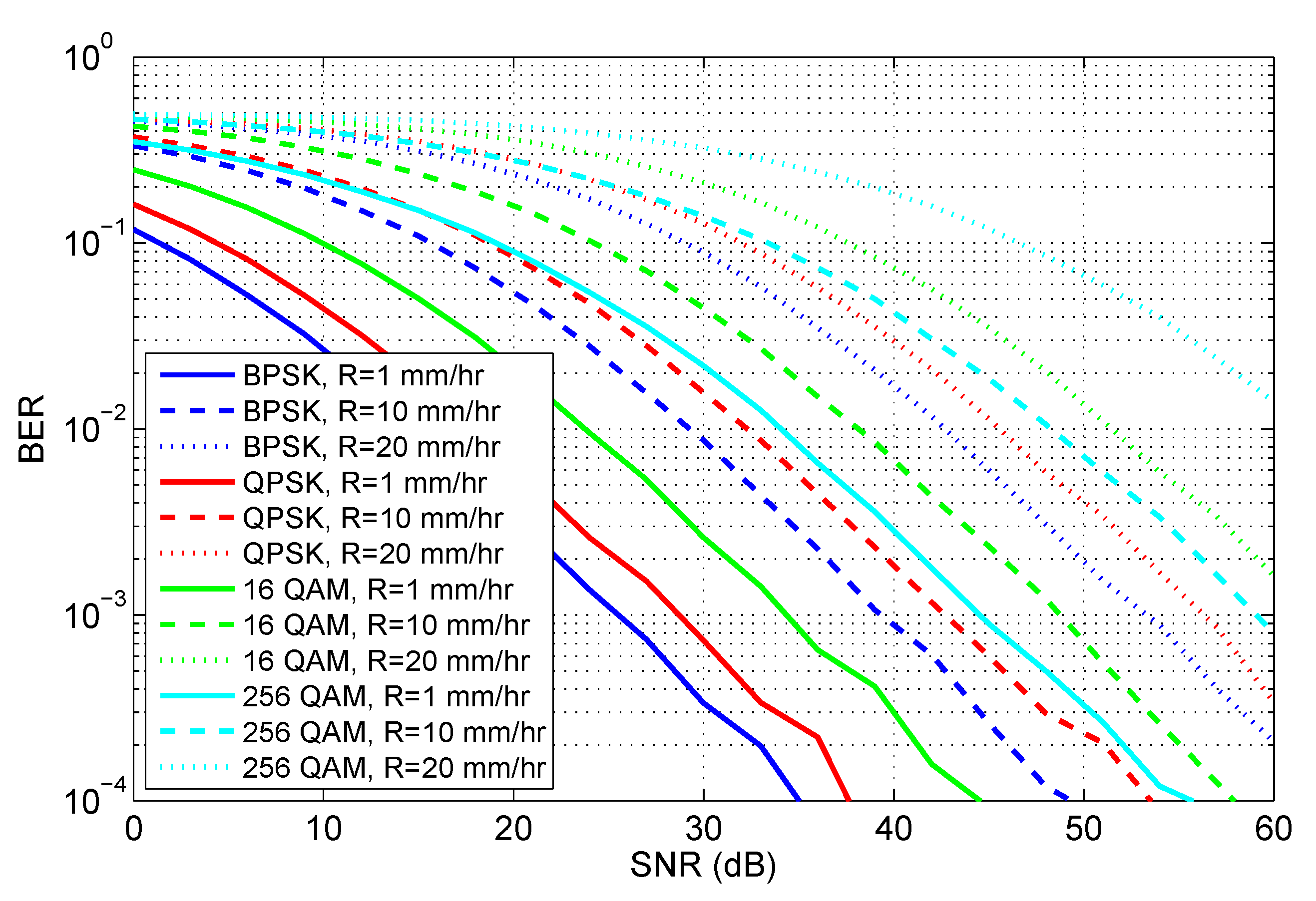
- We build a system model in which we consider switching between various phase shift schemes such as binary Phase-Shift Keying (BPSK), Quadrature Phase-Shift Keying (QPSK), 16-Quadrature Amplitude Modulation (QAM), and 256-QAM modulation schemes in order to satisfy the required BER threshold.
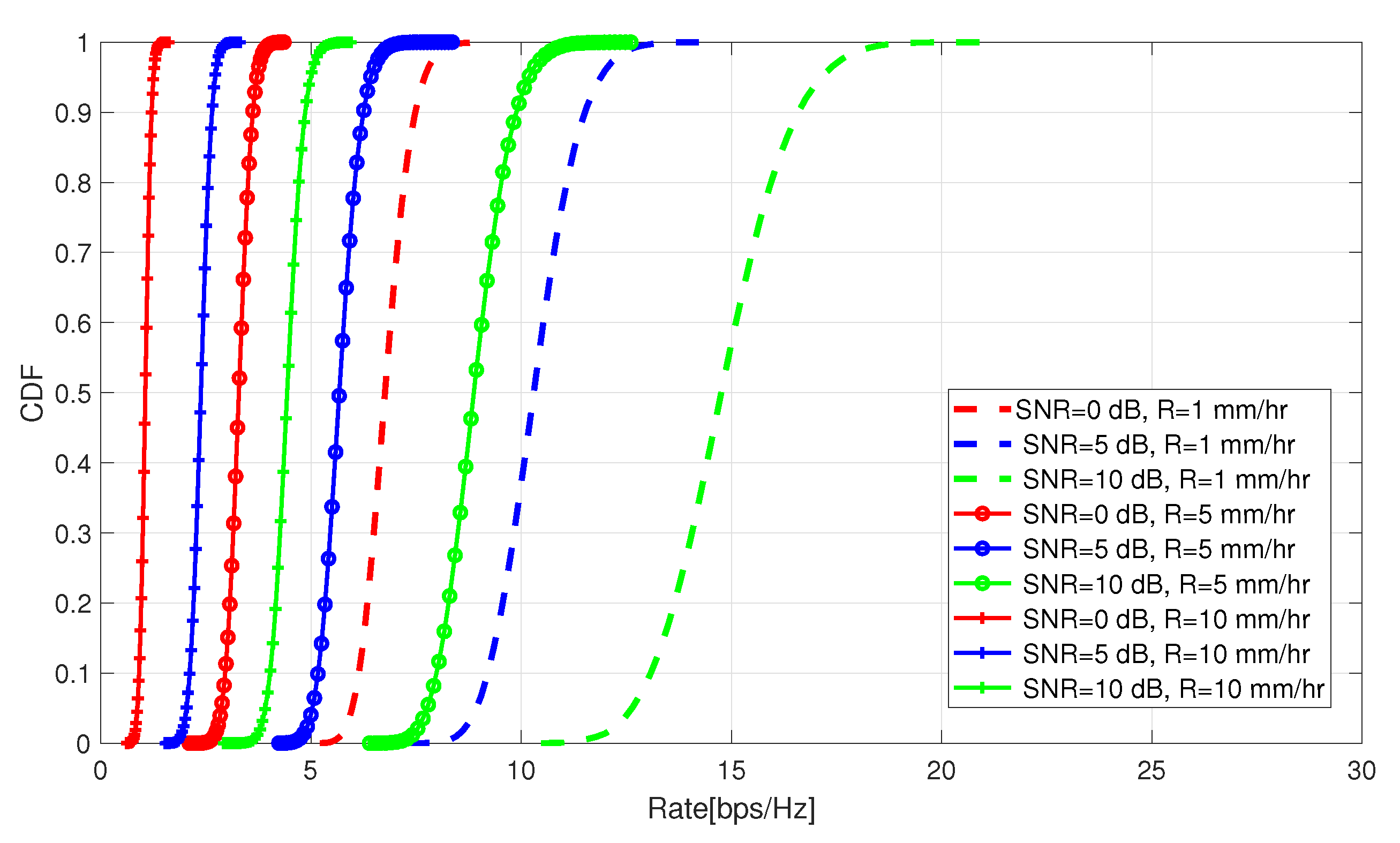
- We analyze the performance of the drone–user communication with various rain, LoS conditions.
- We propose an algorithm based on ML to intelligently adapt to the modulation scheme that offers the best data rate without sacrificing error performance due to atmospheric disturbances.
1.3. Paper Structure
2. Adaptive Modulation Overview
3. System and Channel Modeling
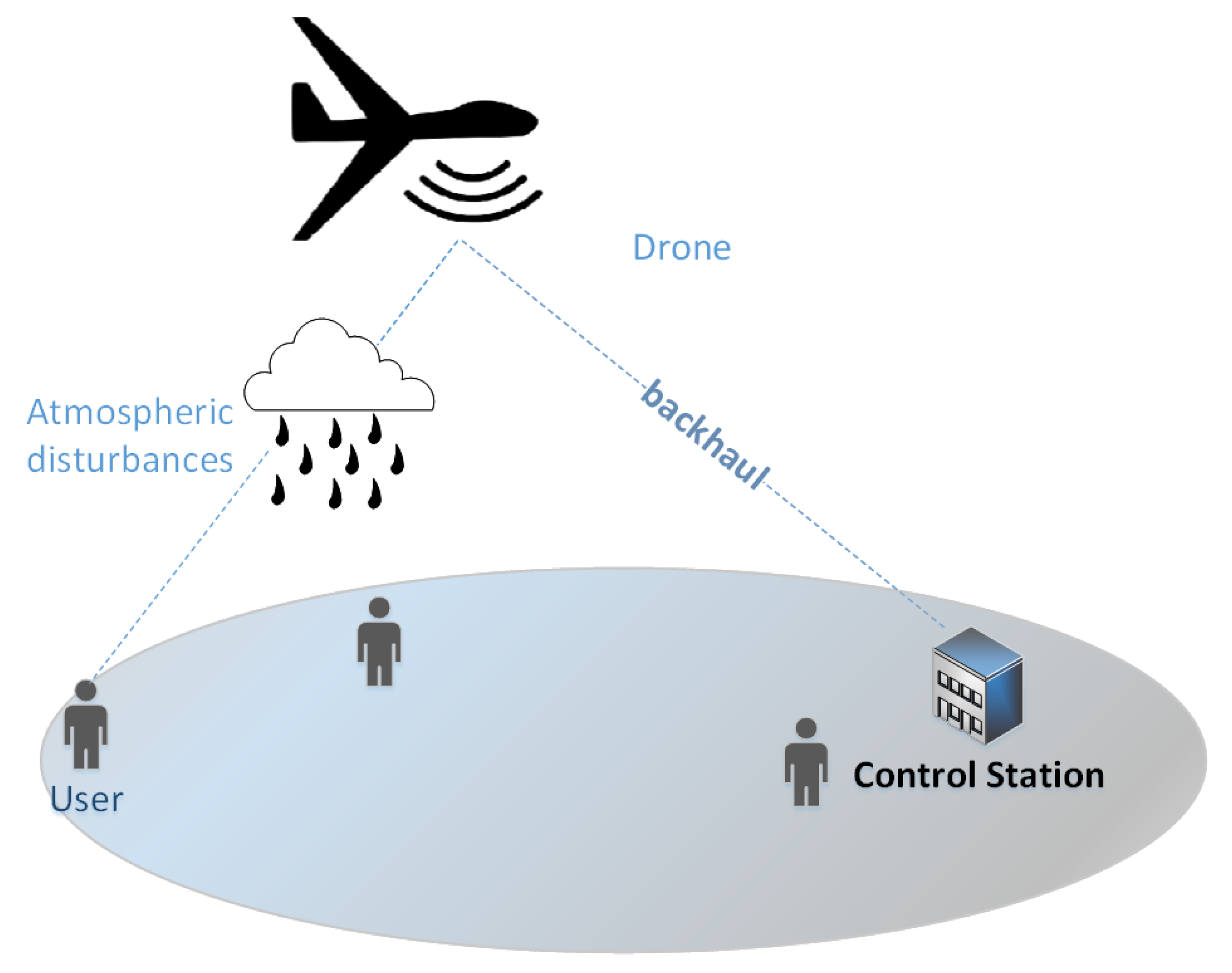
3.1. System Model
3.2. Channel Modeling
4. Ml-Assisted Adaptive Modulation
| Algorithm 1 K-means algorithm. |
|
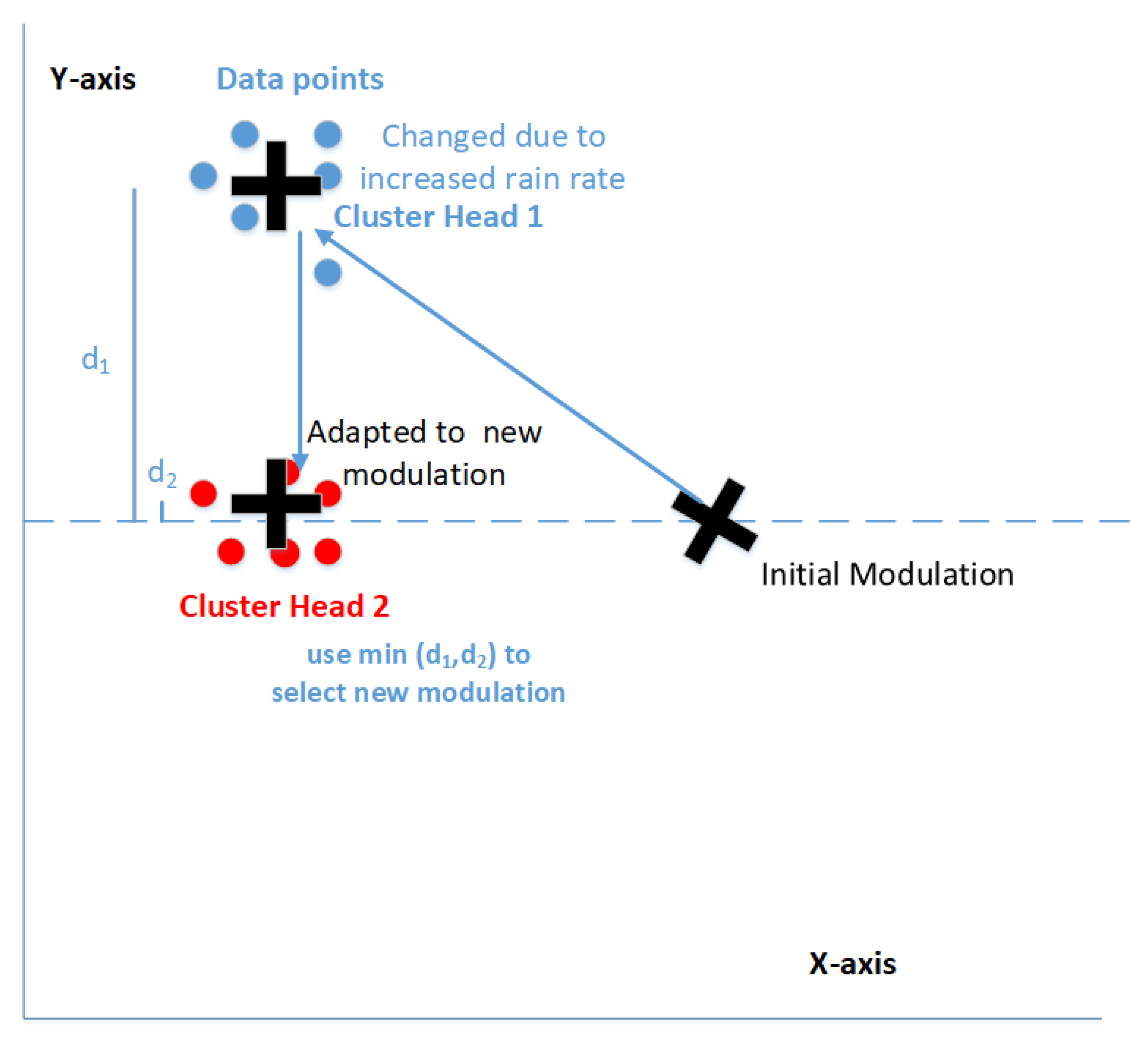
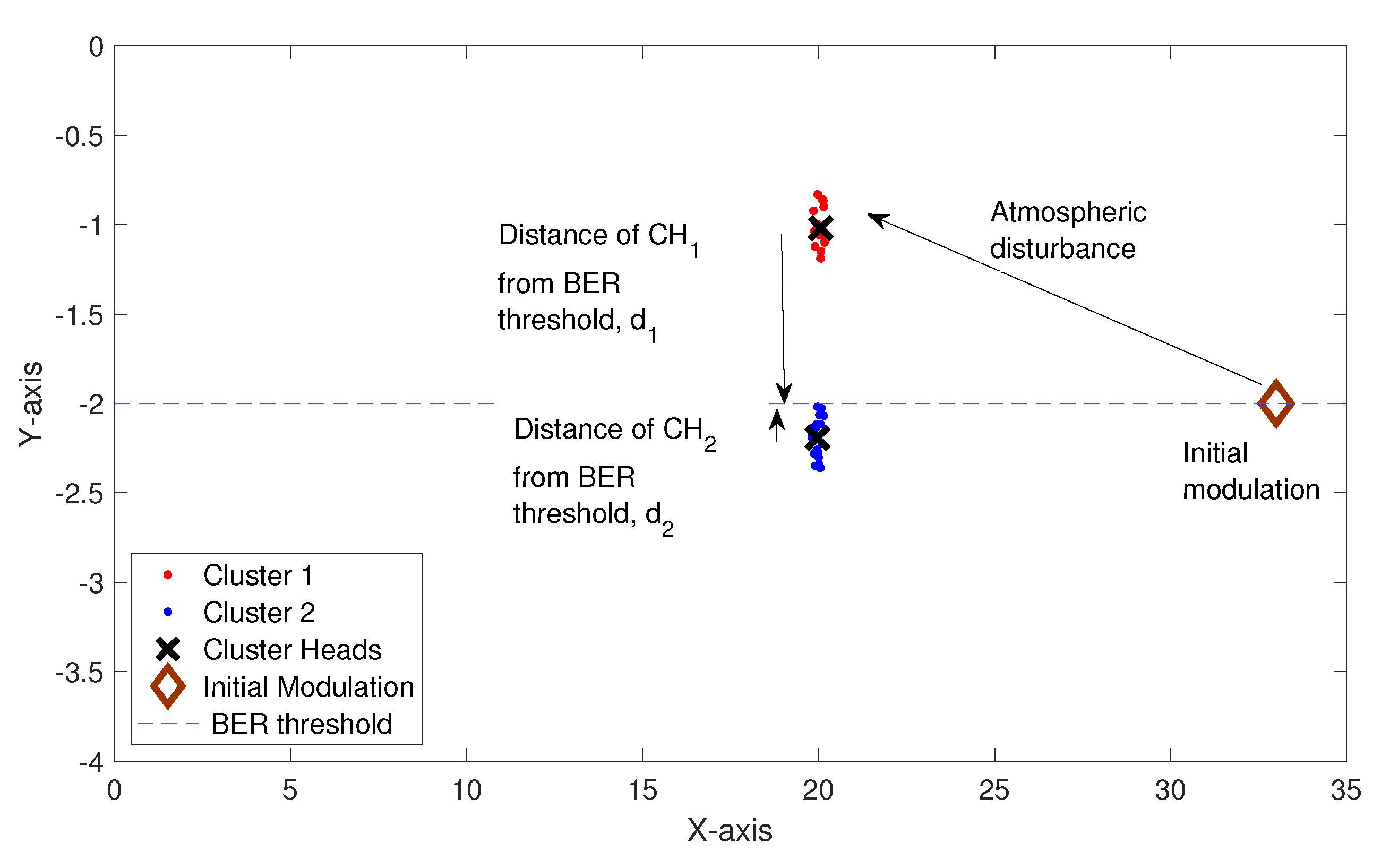
4.1. K-Means Clustering
4.2. Atmospheric Imperfections
- (1)
- The channel is attenuated heavily, and the received signal strength becomes weaker than the desired threshold,
- (2)
- An ill-modeled matrix destroys beam-forming vector design.Adaptive modulation has turned out to be an effective method to provide a higher rate by delivering a satisfactory performance. Hence, we propose adaptive modulation as a capacity maximization scheme under atmospheric imperfections.
Adaptive Modulation Using K-Means Algorithm
| Algorithm 2 ML based AM |
|
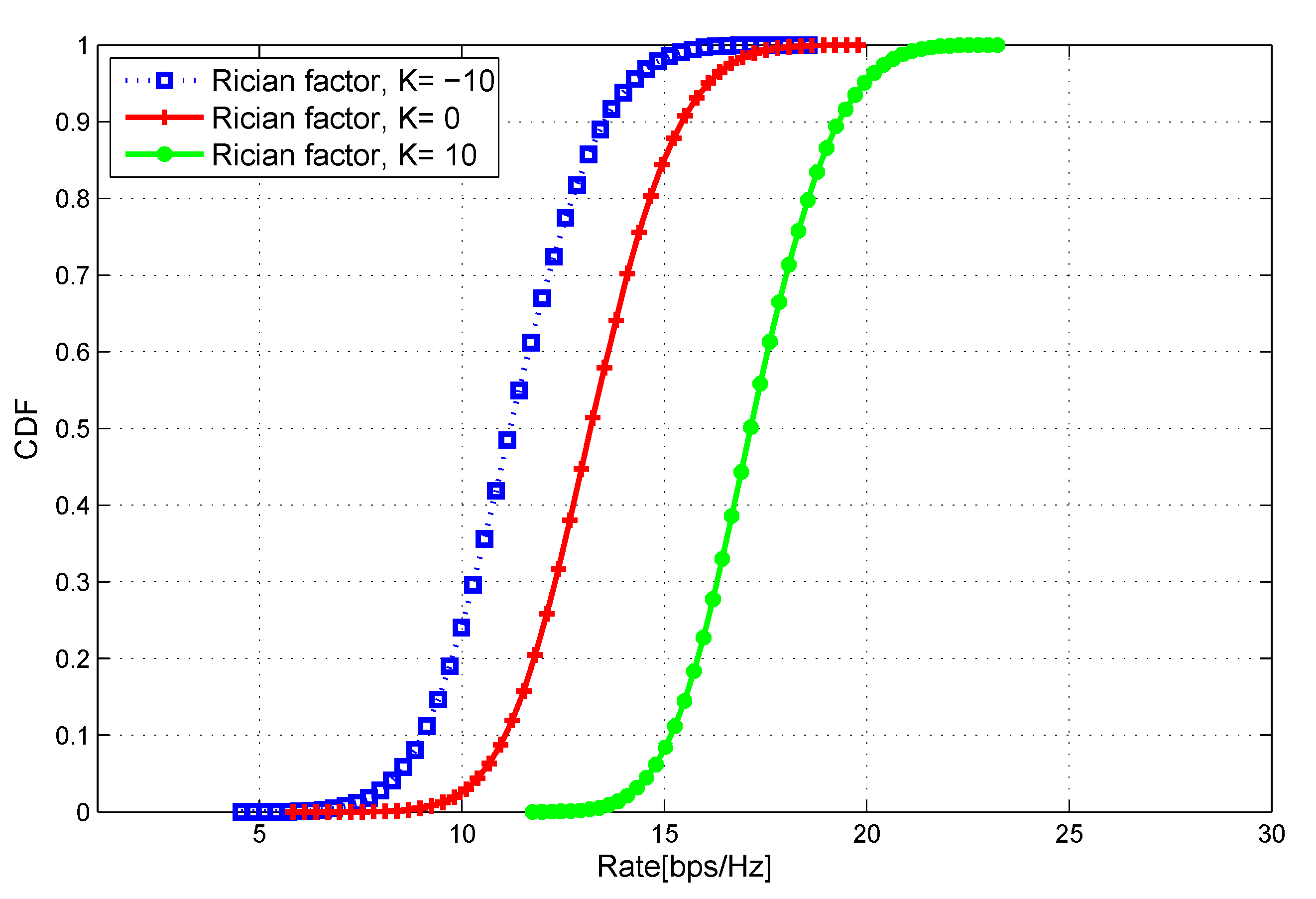
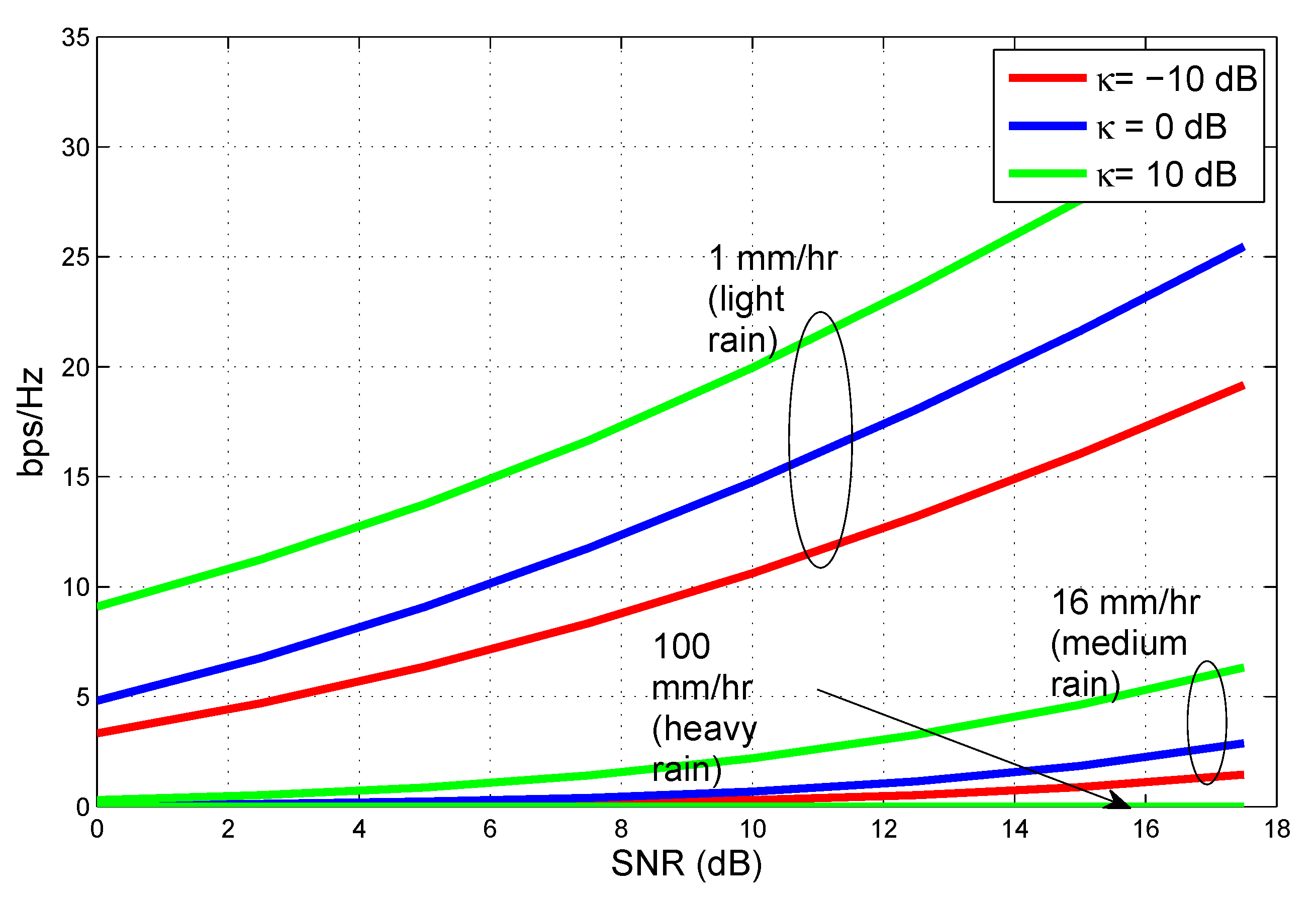
5. Numerical Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zajić, A. Mobile-to-Mobile Wireless Channels; Artech House: London, UK, 2013. [Google Scholar]
- Sudheesh, P.G.; Magarini, M.; Muthuchidambaranathan, P. Achieving maximum system capacity in multiple-high altitude platforms through interference alignment. In Proceedings of the 2016 11th International Conference on Industrial and Information Systems (ICIIS), Roorkee, India, 3–4 December 2016; pp. 139–143. [Google Scholar]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Predictive estimation of the optimal signal strength from unmanned aerial vehicle over internet of things using ANN. arXiv 2018, arXiv:1805.07614. [Google Scholar]
- Alsamhi, S.H.; Rajput, N.S. Implementation of call admission control technique in HAP for enhanced QoS in wireless network deployment. Telecommun. Syst. 2016, 63, 141–151. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Rajput, N.S. An efficient channel reservation technique for improved QoS for mobile communication deployment using high altitude platform. Wirel. Pers. Commun. 2016, 91, 1095–1108. [Google Scholar] [CrossRef]
- Akram, T.; Awais, M.; Naqvi, R.; Ahmed, A.; Naeem, M. Multicriteria UAV base stations placement for disaster management. IEEE Syst. J. 2020, 14, 3475–3482. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Zhang, H.; He, Y. Temporal Correlation and Long-Term Average Performance Analysis of Multiple UAV-Aided Networks. IEEE Internet Things J. 2021, 8, 8854–8864. [Google Scholar] [CrossRef]
- Athukoralage, D.; Guvenc, I.; Saad, W.; Bennis, M. Regret based learning for UAV assisted LTE-U/WiFi public safety networks. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar]
- Sudheesh, P.; Magarini, M.; Muthuchidambaranathan, P. Multiple-high altitude platforms aided system architecture for achieving maximum last mile capacity in satellite communication. Telecommun. Syst. 2019, 70, 27–35. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Al-Dois, H.; Ben Othman, S.; Hassan, J.; Hawbani, A.; Sahal, R.; Lee, B.; Saleh, H. Machine Learning for Smart Environments in B5G Networks: Connectivity and QoS. Comput. Intell. Neurosci. 2021. [Google Scholar] [CrossRef] [PubMed]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Survey on artificial intelligence based techniques for emerging robotic communication. Telecommun. Syst. 2019, 72, 483–503. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M. Convergence of machine learning and robotics communication in collaborative assembly: Mobility, connectivity and future perspectives. J. Intell. Robot. Syst. 2020, 98, 541–566. [Google Scholar] [CrossRef]
- Hussain, F.; Hassan, S.A.; Hussain, R.; Hossain, E. Machine learning for resource management in cellular and IoT networks: Potentials, current solutions, and open challenges. IEEE Commun. Surv. Tutor. 2020, 22, 1251–1275. [Google Scholar] [CrossRef] [Green Version]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Machine learning for wireless connectivity and security of cellular-connected UAVs. IEEE Wirel. Commun. 2019, 26, 28–35. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Shi, S.; Feng, T.; Gu, X. Trajectory planning in UAV emergency networks with potential underlaying D2D communication based on K-means. EURASIP J. Wirel. Commun. Netw. 2021, 1, 1–19. [Google Scholar]
- Wu, X.; Wei, Z.; Cheng, Z.; Zhang, X. Joint optimization of UAV Trajectory and User Scheduling Based on NOMA Technology. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Amorim, R.; Wigard, J.; Nguyen, H.; Kovacs, I.Z.; Mogensen, P. Machine-learning identification of airborne UAV-UEs based on LTE radio measurements. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Alsamhi, S.H.; Almalki, F.; Ma, O.; Ansari, M.S.; Lee, B. Predictive Estimation of Optimal Signal Strength from Drones over IoT Frameworks in Smart Cities. IEEE Trans. Mob. Comput. 2021. [Google Scholar] [CrossRef]
- Luo, F.L. (Ed.) Machine Learning for Future Wireless Communications; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Daniels, R.C.; Caramanis, C.M.; Heath, R.W. Adaptation in convolutionally coded MIMO-OFDM wireless systems through supervised learning and SNR ordering. IEEE Trans. Veh. Technol. 2009, 59, 114–126. [Google Scholar] [CrossRef]
- Xu, G.; Lu, Y. Channel and modulation selection based on support vector machines for cognitive radio. In Proceedings of the 2006 International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 22–24 September 2006; pp. 1–4. [Google Scholar]
- Daniels, R.; Heath, R.W. Online adaptive modulation and coding with support vector machines. In Proceedings of the 2010 European Wireless Conference (EW), Lucca, Italy, 12–15 April 2010; pp. 718–724. [Google Scholar]
- Ko, Y.; Choi, J. Unsupervised Machine Intelligence for Automation of Multi-Dimensional Modulation. IEEE Commun. Lett. 2019, 23, 1783–1786. [Google Scholar] [CrossRef]
- Schnitzer, J.; Prahladan, P.; Rahimzadeh, P.; Humble, C.; Lee, J.; Lee, J.; Lee, K.; Ha, S. Toward Programmable DOCSIS 4.0 Networks: Adaptive Modulation in OFDM Channels. IEEE Trans. Netw. Serv. Manag. 2020, 18, 441–455. [Google Scholar] [CrossRef]
- Mauricio, W.V.; Araujo, D.C.; Neto, F.H.; Lima, F.R.; Maciel, T.F. A low complexity solution for resource allocation and SDMA grouping in massive MIMO systems. In Proceedings of the 2018 15th International Symposium on Wireless Communication Systems (ISWCS), Lisbon, Portugal, 28–31 August 2018; pp. 1–6. [Google Scholar]
- Leite, J.P.; de Carvalho, P.H.P.; Vieira, R.D. A flexible framework based on reinforcement learning for adaptive modulation and coding in OFDM wireless systems. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 809–814. [Google Scholar]
- de Carvalho, P.H.P.; Vieira, R.D.; Leite, J.P. A Continuous-State Reinforcement Learning Strategy for Link Adaptation in OFDM Wireless Systems. J. Commun. Inf. Syst. 2015, 30. [Google Scholar] [CrossRef]
- Mota, M.P.; Araujo, D.C.; Costa Neto, F.H.; de Almeida, A.L.F.; Cavalcanti, F.R. Adaptive Modulation and Coding Based on Reinforcement Learning for 5G Networks. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Tan, J.; Liang, Y.C.; Feng, G.; Niyato, D. Deep reinforcement learning-based modulation and coding scheme selection in cognitive heterogeneous networks. IEEE Trans. Wirel. Commun. 2019, 18, 3281–3294. [Google Scholar] [CrossRef] [Green Version]
- Sudheesh, P.; Mozaffari, M.; Magarini, M.; Saad, W.; Muthuchidambaranathan, P. Sum-rate analysis for high altitude platform (HAP) drones with tethered balloon relay. IEEE Commun. Lett. 2017, 22, 1240–1243. [Google Scholar] [CrossRef] [Green Version]
- Ishimaru, A.; Jaruwatanadilok, S.; Ritcey, J.A.; Kuga, Y. A MIMO propagation channel model in a random medium. IEEE Trans. Antennas Propag. 2009, 58, 178–186. [Google Scholar] [CrossRef]
- Spillard, C.; Gremont, B.; Grace, D.; Tozer, T. The performance of high-altitude platform networks in rainy conditions. In Proceedings of the 22nd AIAA International Communications Satellite Systems Conference & Exhibit 2004 (ICSSC), Monterey, CA, USA, 9–12 May 2004; p. 3220. [Google Scholar]
- Rundstedt, K. Measurements and Channel Modelling of Microwave Line-of-Sight MIMO Links. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2015. [Google Scholar]
- Kandus, G.; Mohorcic, M.; Smolnikar, M.; Leitgeb, E.; Javornik, T. A channel model of atmospheric impairment for the design of adaptive coding and modulation in stratospheric communication. WSEAS Trans. Commun. 2008, 7, 311–326. [Google Scholar]
- Bohagen, F.; Orten, P.; Oien, G. Modeling and analysis of a 40 GHz MIMO system for fixed wireless access. In Proceedings of the 2005 IEEE 61st Vehicular Technology Conference, Stockholm, Sweden, 30 May–1 June 2005; Volume 3, pp. 1691–1695. [Google Scholar]
- Zhao, Z.w.; Zhang, M.g.; Wu, Z.s. Analytic specific attenuation model for rain for use in prediction methods. Int. J. Infrared Millim. Waves 2001, 22, 113–120. [Google Scholar] [CrossRef]
- Jiang, X.; Shokri-Ghadikolaei, H.; Fodor, G.; Modiano, E.; Pang, Z.; Zorzi, M.; Fischione, C. Low-latency networking: Where latency lurks and how to tame it. Proc. IEEE 2018, 107, 280–306. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Kanatas, A.G. Three-dimensional HAP-MIMO channels: Modeling and analysis of space-time correlation. IEEE Trans. Veh. Technol. 2010, 59, 2232–2242. [Google Scholar] [CrossRef]
- Dong, F.; He, Y.; Nan, H.; Zhang, Z.; Wang, J. System capacity analysis on constellation of interconnected HAP networks. In Proceedings of the 2015 IEEE fifth international conference on big data and cloud computing, Dalian, China, 26–28 August 2015; pp. 154–159. [Google Scholar]
- Cho, Y.S.; Kim, J.; Yang, W.Y.; Kang, C.G. MIMO-OFDM Wireless Communications with MATLAB; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Sudheesh, P.; Sharma, N.; Magarini, M.; Muthuchidambaranathan, P. Effect of imperfect CSI on interference alignment in multiple-High Altitude Platforms based communication. Phys. Commun. 2018, 29, 336–342. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Highlighted | Advantages | Limitation and Future Directions |
|---|---|---|---|
| [21] | Link adaptation in OFDM using K-NN algorithm | -Supervised learning algorithm, which works well, if training data are available. -Applied in the MIMO system | Training data are required in supervised learning |
| [22] | Channel and modulation selection using SVM algorithm in cognitive radio | -Supervised learning algorithm, training improves performance -Applied in cognitive radio | Applied in cognitive radio, not generalized. |
| [23] | Fast link adaption using ML algorithm | -Uses SVM method for fast adaption | Data set is required for training |
| [24] | Adaptive modulation in under water acoustic network | -Improved performance verified with practical experiments -Uses K-NN and k-means algorithm | k-means is used for training set condensation |
| [25] | Adaptive modulation in wired communication where different cable modems with similar channel conditions are clustered | -Classification using k-means -Improves performance in wired OFDM transmission | Applied in wired channel and extension to wireless is not considered |
| [26] | Application of K-means clustering in multi-user Massive MIMO scenario | -K-Means clustering is used for clustering user groups and clusters that maximize capacity are selected | Applicable in Massive MIMO scenario |
| [27] | Novel framework for AM in OFDM | -Used Q-Learning, an RL algorithm -Decision is based on information in the Q-Table | Performance is poor in initial stages. |
| [28] | Link adaptation in OFDM | -Same as above -Extensive study about RL in AM is carried out | RL requires huge time to converge |
| [29] | Q-learning-based adaptive modulation for 5G network | -Computationally less complex -Need not possess big storage as RL does not require previous data | RL takes huge time for convergence. |
| [30] | Deep reinforcement learning-based adaptive modulation in cognitive heterogeneous neztworks | -Can process complex data -By improving the neural network we can improve the performance and/or capacity of the data processing | Computationally complex and drones have limited computational power. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gopi, S.P.; Magarini, M.; Alsamhi, S.H.; Shvetsov, A.V. Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G. Drones 2021, 5, 128. https://doi.org/10.3390/drones5040128
Gopi SP, Magarini M, Alsamhi SH, Shvetsov AV. Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G. Drones. 2021; 5(4):128. https://doi.org/10.3390/drones5040128
Chicago/Turabian StyleGopi, Sudheesh Puthenveettil, Maurizio Magarini, Saeed Hamood Alsamhi, and Alexey V. Shvetsov. 2021. "Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G" Drones 5, no. 4: 128. https://doi.org/10.3390/drones5040128
APA StyleGopi, S. P., Magarini, M., Alsamhi, S. H., & Shvetsov, A. V. (2021). Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G. Drones, 5(4), 128. https://doi.org/10.3390/drones5040128