
Accuracy Assessment of Cultural Heritage Models Extracting 3D Point Cloud Geometric Features with RPAS SfM-MVS and TLS Techniques


Abstract
:1. Introduction
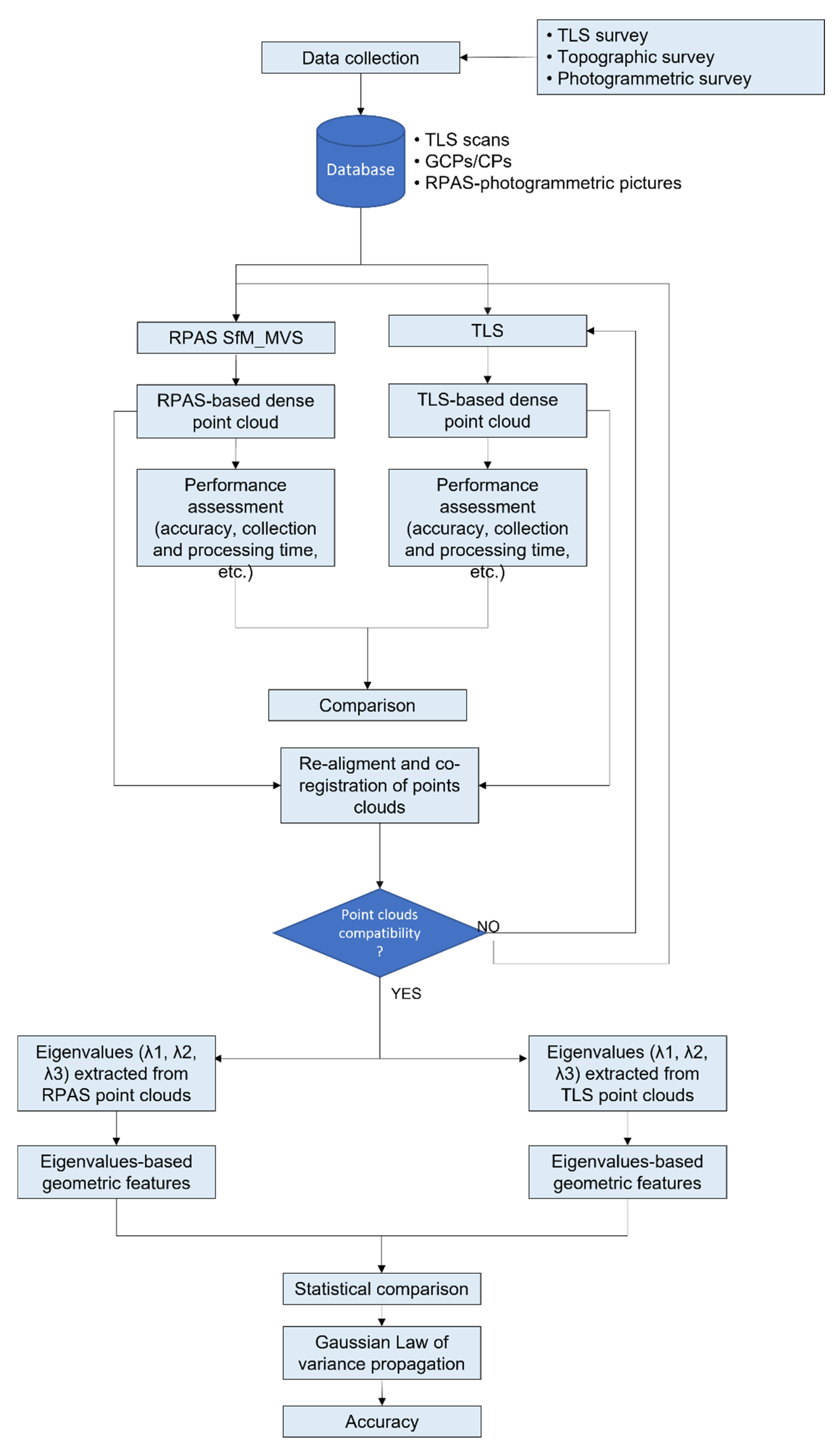
2. Materials and Methods
2.1. Data Collection and Database Construction
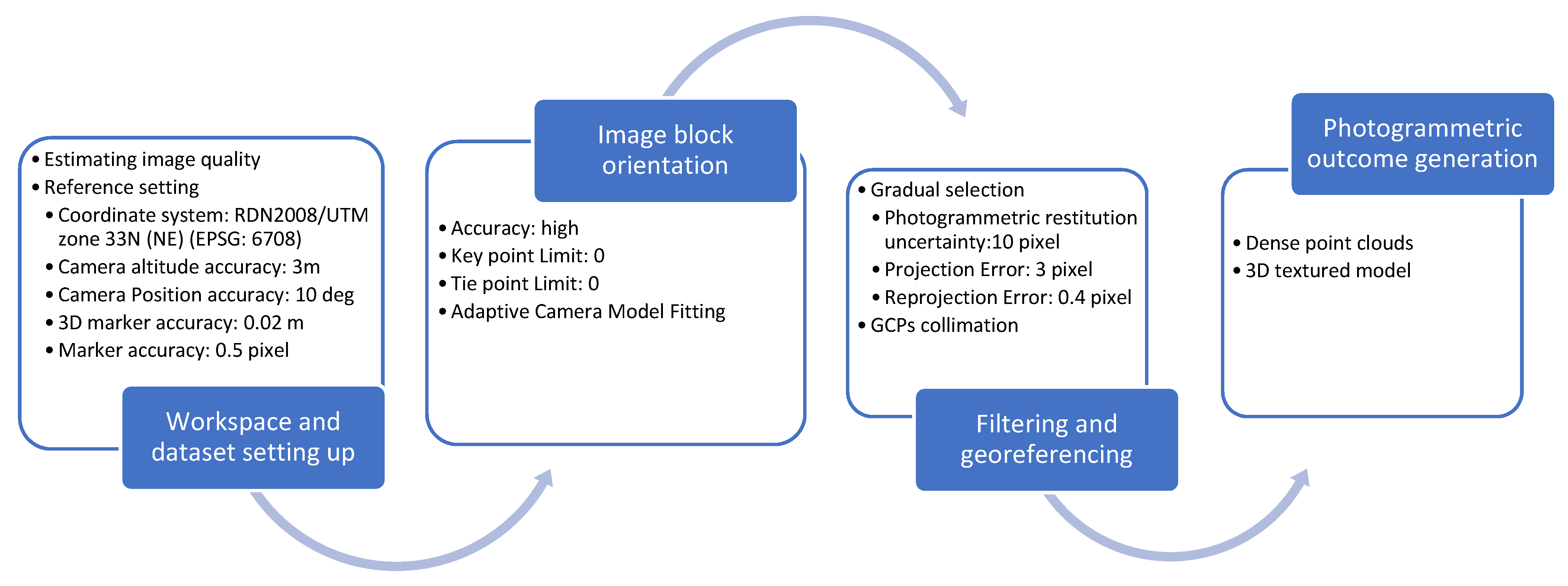
2.2. RPAS Digital Photogrammetry
2.3. TLS
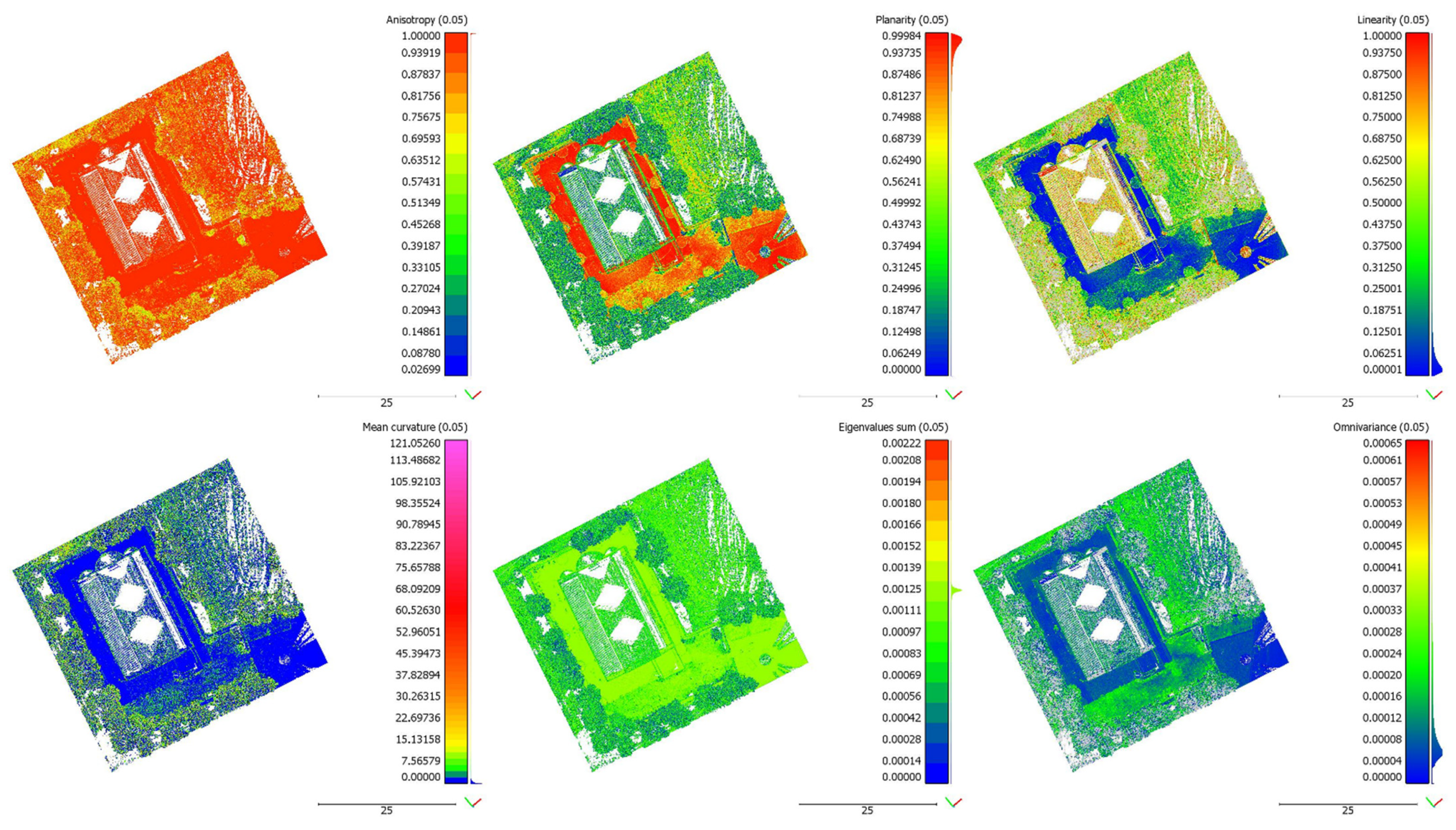
2.4. Geometric Feature Extraction and 3D Point Cloud Accuracy Assessment
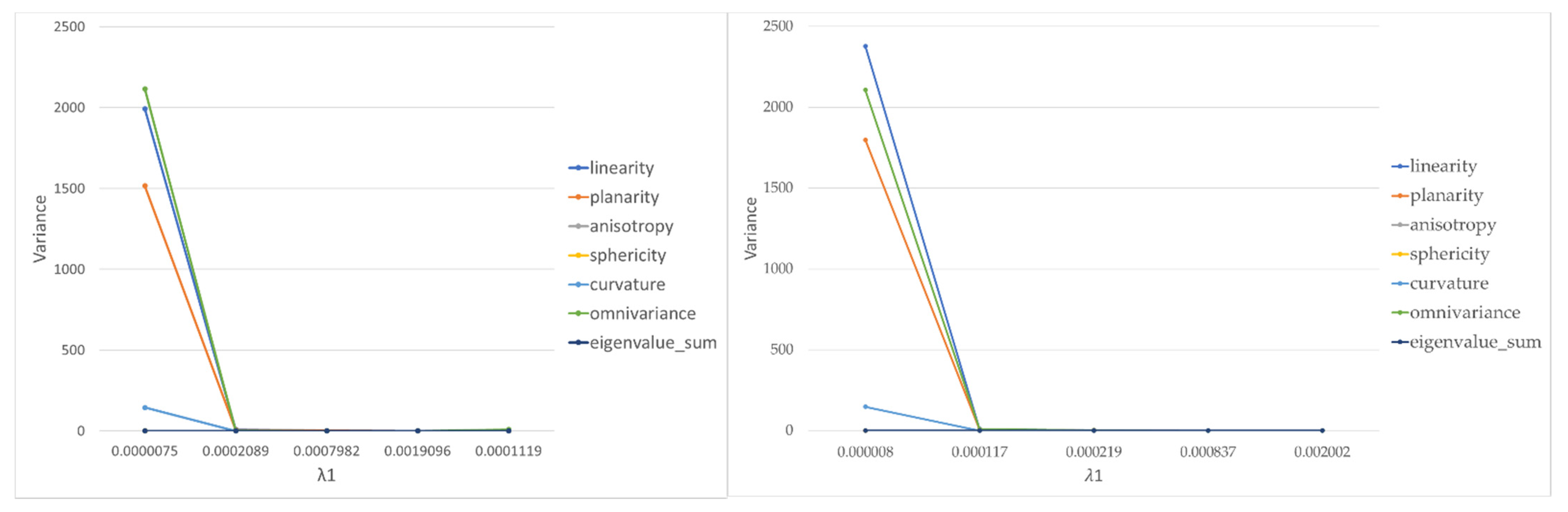
2.5. The Gaussian Law of Variance Propagation
3. Case Study
4. Results and Discussion
5. Conclusions
- RPAS allowed reducing the time required to collect the input data while TLS permitted generating the final 3D model in a shorter operational time;
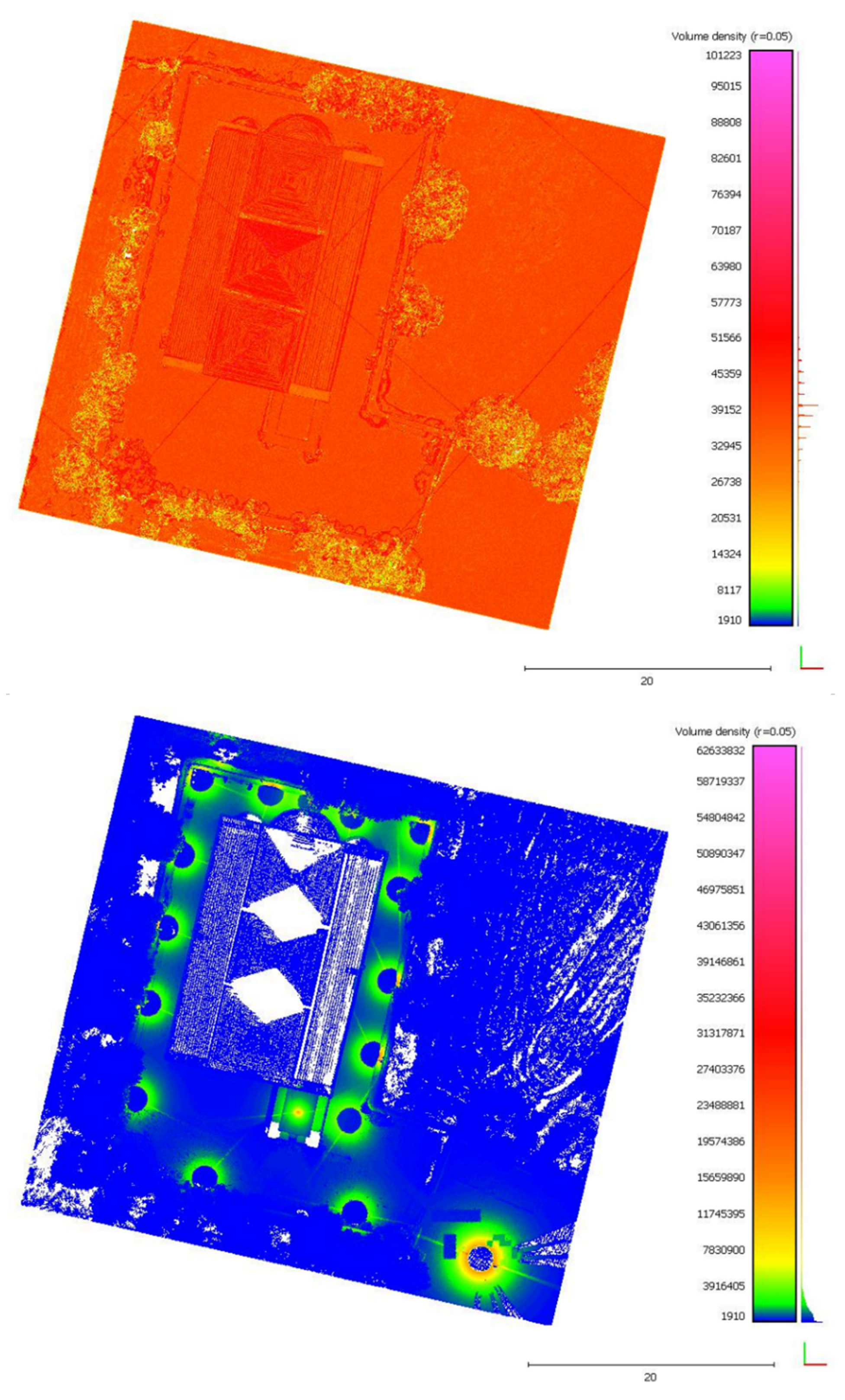
- The RPAS-based point cloud was less dense than the one produced by TLS and thus more easily manageable;
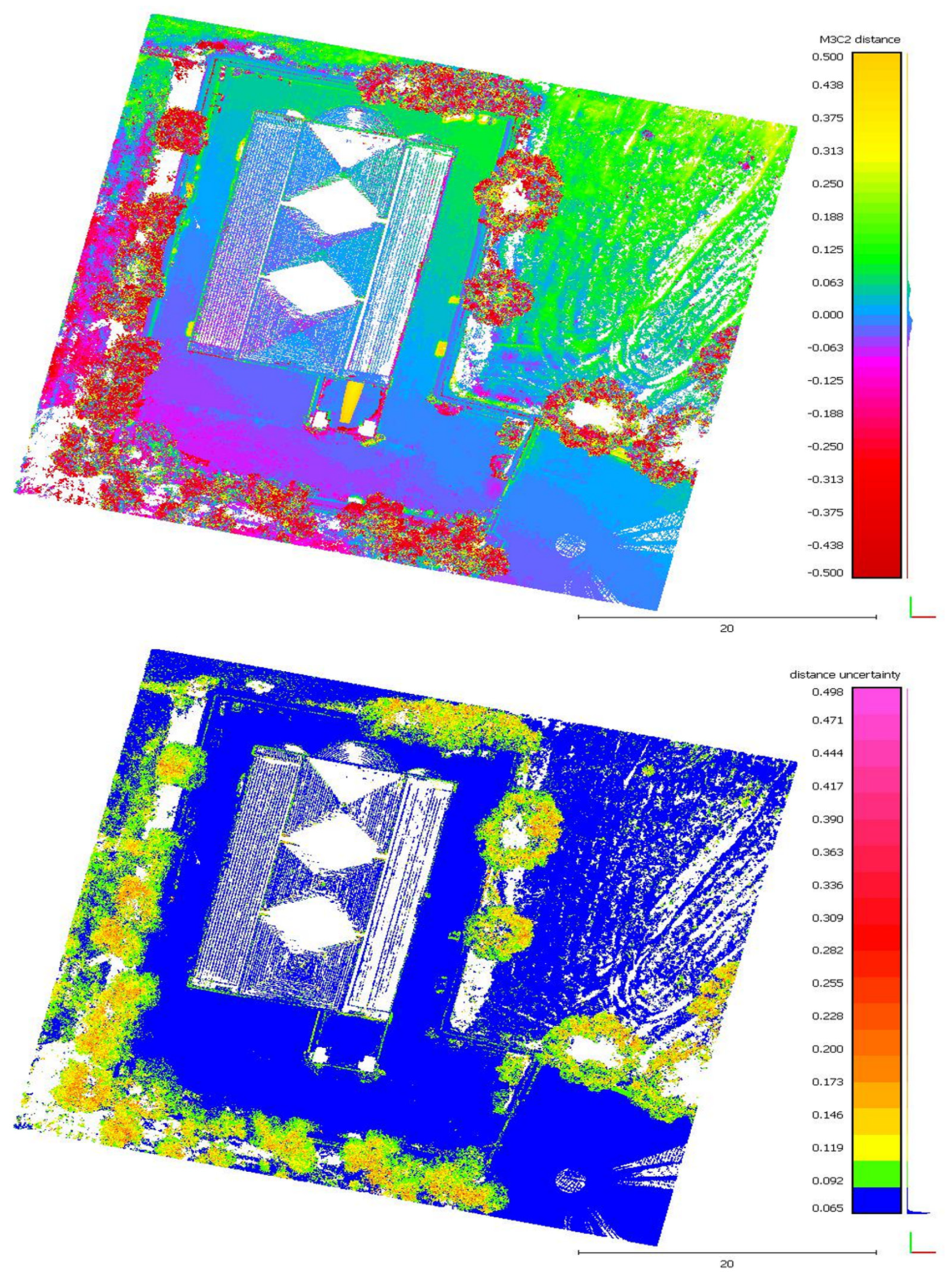
- The point distribution of the TLS-derived cloud was not homogeneous and, consequently, the accuracy of the 3D reconstruction was not uniform in the final model;
- RPAS allowed surveying the entire study area while TLS did not permit the collection of data concerning the roof of the Monastery, the vegetated areas, and the grounds;
- RPAS was a low-cost tool while TLS was a highly expensive instrument.
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviation
| 3D | Three-Dimensional |
| AGL | Above Ground Level |
| BBA | Bundle Block Adjustment |
| CORS | Continuous Operation Reference Stations |
| CPs | Check Points |
| EPSG | European Petroleum Survey Group |
| GCPs | Ground Control Points |
| GNSS | Global Navigation Satellite System |
| GSD | Ground Sample Distance |
| IMU | Inertial Measurement Unit |
| INS | Inertial Navigation System |
| LoD | Level of Detection |
| M3C2 | Model-to-Model Cloud Comparison |
| MSV | MultiView Stereo |
| nRTK | Network Real-Time Kinematic |
| RMSE | Root Mean Square Error |
| RPAS | Remotely Piloted Aircraft Systems |
| SfM | Structure from Motion |
| TLS | Terrestrial Laser Scanner |
| v. | version |
References
- El-Hakim, S.F.; Beraldin, J.A.; Picard, M.; Godin, G. Detailed 3D reconstruction of large-scale heritage sites with integrated techniques. IEEE Comput. Graph. Appl. 2004, 24, 21–29. [Google Scholar] [CrossRef]
- Remondino, F. Heritage recording and 3D modeling with photogrammetry and 3D scanning. Remote Sens. 2011, 3, 1104–1138. [Google Scholar] [CrossRef] [Green Version]
- Jo, Y.H.; Hong, S. Three-dimensional digital documentation of cultural heritage site based on the convergence of terrestrial laser scanning and unmanned aerial vehicle photogrammetry. ISPRS Int. J. Geo-Inf. 2019, 8, 53. [Google Scholar] [CrossRef] [Green Version]
- Son, S.W.; Kim, D.W.; Sung, W.G.; Yu, J.J. Integrating UAV and TLS Approaches for Environmental Management: A Case Study of a Waste Stockpile Area. Remote Sens. 2020, 12, 1615. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Palladino, M.; Nasta, P.; Capolupo, A.; Romano, N. Monitoring and modelling the role of phytoremediation to mitigate non-point source cadmium pollution and groundwater contamination at field scale. Ital. J. Agron. 2018, 13 (Suppl. 1), 59–68. [Google Scholar]
- Luhmann, T.; Chizhova, M.; Gorkovchuk, D. Fusion of UAV and Terrestrial Photogrammetry with Laser Scanning for 3D Reconstruction of Historic Churches in Georgia. Drones 2020, 4, 53. [Google Scholar] [CrossRef]
- Rangel, J.M.G.; Gonçalves, G.R.; Pérez, J.A. The impact of number and spatial distribution of GCPs on the positional accuracy of geospatial products derived from low-cost UASs. Int. J. Remote Sens. 2018, 39, 7154–7171. [Google Scholar] [CrossRef]
- Padró, J.C.; Muñoz, F.J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 130–140. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; Torres-Sánchez, J.; Clavero-Rumbao, I.; García-Ferrer, A.; Peña, J.M.; BorraSerrano, I.; López-Granados, F. Assessing optimal flight parameters for generating accurate multispectral orthomosaicks by UAV to support site-specific crop management. Remote Sens. 2015, 7, 12793–12814. [Google Scholar] [CrossRef] [Green Version]
- Saponaro, M.; Capolupo, A.; Caporusso, G.; Borgogno Mondino, E.; Tarantino, E. Predicting the Accuracy of Photogrammetric 3D Reconstruction from Camera Calibration Parameters through a Multivariate Statistical Approach. In Proceedings of the XXIV ISPRS Congress, Nice, France, 4–10 July 2020; ISPRS: Hannover, Germany, 2020; Volume 43, pp. 479–486. [Google Scholar]
- Capolupo, A.; Saponaro, M.; Borgogno Mondino, E.; Tarantino, E. Combining Interior Orientation Variables to Predict the Accuracy of RPAS–SFM 3D Models. Remote Sens. 2020, 12, 2674. [Google Scholar] [CrossRef]
- Lumban-Gaol, Y.A.; Murtiyoso, A.; Nugroho, B.H. Investigations on the bundle adjustment results from SFM-based software for mapping purposes. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 623–628. [Google Scholar] [CrossRef] [Green Version]
- Weinmann, M.; Jutzi, B.; Mallet, C. Feature relevance assessment for the semantic interpretation of 3D point cloud data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 313–318. [Google Scholar] [CrossRef] [Green Version]
- Dittrich, A.; Weinmann, M.; Hinz, S. Analytical and numerical investigations on the accuracy and robustness of geometric features extracted from 3D point cloud data. ISPRS J. Photogramm. Remote Sens. 2017, 126, 195–208. [Google Scholar] [CrossRef]
- Chehata, N.; Guo, L.; Mallet, C. Airborne LIDAR feature selection for urban classification using random forests. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38 Pt 3/W8, 207–212. [Google Scholar]
- Mallet, C.; Bretar, F.; Roux, M.; Soergel, U.; Heipke, C. Relevance assessment of full-waveform lidar data for urban area classification. ISPRS J. Photogramm. Remote Sens. 2011, 66, S71–S84. [Google Scholar] [CrossRef]
- Maas, H.-G.; Vosselman, G. Two algorithms for extracting building models from raw laser altimetry data. ISPRS J. Photogramm. Remote Sens. 1999, 54, 153–163. [Google Scholar] [CrossRef]
- DJI. Dà-Jiāng Innovations. 2020. Available online: https://www.dji.com (accessed on 11 December 2019).
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Cima, V.; Carroccio, M.; Maseroli, R. Corretto utilizzo dei Sistemi Geodetici di Riferimento all’interno dei software GIS. In Proceedings of the Atti 18a Conferenza Nazionale ASITA, Firenze, Italy, 14–16 October 2014; pp. 359–363. [Google Scholar]
- Agisoft LLC. Agisoft Metashape User Manual—Professional Edition, Version 1.6; Agisoft LLC: St. Petersburg, Russia, 2020; pp. 1–172. Available online: https://www.agisoft.com/pdf/metashape-pro_1_6_en.pdf (accessed on 22 January 2021).
- Wang, X.; Wu, X. Application of Leica RTC360 3D laser scanner in completion survey. Bull. Surv. Mapp. 2019, 10, 150. [Google Scholar]
- Tong, X.; Liu, X.; Chen, P.; Liu, S.; Luan, K.; Li, L.; Liu, S.; Liu, X.; Xie, H.; Jin, Y.; et al. Integration of UAV-based photogrammetry and terrestrial laser scanning for the three-dimensional mapping and monitoring of open-pit mine areas. Remote Sens. 2015, 7, 6635–6662. [Google Scholar] [CrossRef] [Green Version]
- Beretta, F.; Shibata, H.; Cordova, R.; Peroni, R.D.L.; Azambuja, J.; Costa, J.F.C.L. Topographic modelling using UAVs compared with traditional survey methods in mining. REM Int. Eng. J. 2018, 71, 463–470. [Google Scholar] [CrossRef]
- Caroti, G.; Piemonte, A.; Nespoli, R. UAV-Borne photogrammetry: A low-cost 3D surveying methodology for cartographic update. MATEC Web Conf. 2017, 120, 09005, EDP Sciences. [Google Scholar] [CrossRef] [Green Version]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.M.; Madrigal, V.P.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Daakir, M.; Pierrot-Deseilligny, M.; Bosser, P.; Pichard, F.; Thom, C.; Rabot, Y. Study of lever-arm effect using embedded photogrammetry and on-board GPS receiver on UAV for metrological mapping purpose and proposal of a free ground measurements calibration procedure. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XL-3/W4, 65–70. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimizing UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Gruen, A.; Beyer, H.A. System calibration through self calibration. In Calibration and Orientation of Cameras in Computer Vision; Gruen, A., Huang, T.S., Eds.; Springer: New York, NY, USA, 2001; pp. 163–194. [Google Scholar]
- Triggs, W.; McLauchlan, P.; Hartley, R.; Fitzgibbon, A. Bundle adjustment—A modern synthesis. In Vision Algorithms: Theory and Practice; Triggs, W., Ziesserman, A., Sterliski, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2000; pp. 298–375. [Google Scholar]
- Saponaro, M.; Capolupo, A.; Tarantino, E.; Fratino, U. Comparative Analysis of Different UAV-Based Photogrammetric Processes to Improve Product Accuracies. In Proceedings of the International Conference on Computational Science and Its Applications, St. Petersburg, Russia, 1–4 July 2019; Springer: Cham, Switzerland, 2019; pp. 225–238. [Google Scholar]
- Gagliolo, S.; Fagandini, R.; Passoni, D.; Federici, B.; Ferrando, I.; Pagliari, D.; Pinto, L.; Sguerso, D. Parameter optimization for creating reliable photogrammetric models in emergency scenarios. Appl. Geomat. 2018, 10, 501–514. [Google Scholar] [CrossRef]
- Saponaro, M.; Tarantino, E.; Fratino, U. Generation of 3D surface models from UAV imagery varying flight patterns and processing parameters. AIP Conf. Proc. 2019, 2116, 280009, AIP Publishing LLC. [Google Scholar]
- Girardeau-Montaut, D. Cloud Compare—3D Point Cloud and Mesh Processing Software; Open Source Project. Available online: http://www.danielgm.net/cc/ (accessed on 20 March 2020).
- Costantino, D.; Angelini, M.G.; Caprino, G. Laser scanner survey of an archaeological site—Scala di Furno (Lecce, Italy). In Proceedings of the ISPRS Commission V, Mid-Term Symposium “Close Range Image Measurements Techniques”, Newcastle upon Tyne, UK, 21–24 June 2010; Volume XXXVIII Part 5, pp. 178–183. [Google Scholar]
- Capolupo, A.; Maltese, A.; Saponaro, M.; Costantino, D. Integration of terrestrial laser scanning and UAV-SFM technique to generate a detailed 3D textured model of a heritage building. In Earth Resources and Environmental Remote Sensing/GIS Applications XI; International Society for Optics and Photonics: Bellingham, WA, USA, 2020; Volume 11534, p. 115340Z. [Google Scholar]
- Ozimek, A.; Ozimek, P.; Skabek, K.; Łabędź, P. Digital modelling and accuracy verification of a complex architectural object based on photogrammetric reconstruction. Buildings 2021, 11, 206. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Fugazza, D.; Scaioni, M.; Corti, M.; D’Agata, C.; Azzoni, R.S.; Cernuschi, M.; Smiraglia, C.; Diolaiuti, G.A. Combination of UAV and terrestrial photogrammetry to assess rapid glacier evolution and map glacier hazards. Nat. Hazards Earth Syst. Sci. 2018, 18, 1055–1071. [Google Scholar] [CrossRef] [Green Version]
- Jutzi, B.; Gross, H. Nearest neighbour classification on laser point clouds to gain object structures from buildings. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38 Pt 1, 4–7. [Google Scholar]
- Lee, I.; Schenk, T. Perceptual organization of 3D surface points. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 193–198. [Google Scholar]
- Demantké, J.; Mallet, C.; David, N.; Vallet, B. Dimensionality Based Scale Selection in 3D Lidar Point Clouds; Laserscanning: Calgary, AB, Canada, 2011; pp. 1–7. [Google Scholar]
- West, K.F.; Webb, B.N.; Lersch, J.R.; Pothier, S.; Triscari, J.M.; Iverson, A.E. Context-driven automated target detection in 3D data. In Proceedings of the SPIE 5426, Automatic Target Recognition XIV, SPIE, Orlando, FL, USA, 12–16 April 2004; pp. 133–143. [Google Scholar]
- Pauly, M.; Keiser, R.; Gross, M. Multi-scale feature extraction on point-sampled surfaces. Comput. Graph. Forum 2003, 22, 281–289. [Google Scholar] [CrossRef] [Green Version]
- Mitra, N.J.; Nguyen, A. Estimating surface normals in noisy point cloud data. In Proceedings of the Annual Symposium on Computational Geometry, ACM, San Diego, CA, USA, 8–10 June 2003; pp. 322–328. [Google Scholar]
- Nurunnabi, A.; Belton, D.; West, G. Robust statistical approaches for local planar surface fitting in 3D laser scanning data. ISPRS J. Photogramm. Remote Sens. 2014, 96, 106–122. [Google Scholar] [CrossRef] [Green Version]
- Hubert, M.; Rousseeuw, P.J.; Vanden Branden, K. Robpca: A new approach to robust principal component analysis. Technometrics 2005, 47, 64–79. [Google Scholar] [CrossRef]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning geometry: Influencing factor on the quality of terrestrial laser scanning points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Di Francesco, P.M.; Bonneau, D.; Hutchinson, D.J. The Implications of M3C2 Projection Diameter on 3D Semi-Automated Rockfall Extraction from Sequential Terrestrial Laser Scanning Point Clouds. Remote Sens. 2020, 12, 1885. [Google Scholar] [CrossRef]
- Di Monte, R. Ognissanti di Valenzano: Il monastero benedettino e le sue vicende storiche. Nicolaus. Studi Stor. 1999, 10, 24865349. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RPAS | TLS | |
|---|---|---|
| ACQUISITION TIME (min) | ~14 | ~150 |
| PROCESSING TIME (min) | ~974 | ~300 |
| DENSE POINT CLOUDS NUMEROSITY (n° points) | 28,202,789 | 195,939,535 |
| GCPs | CPs | |
|---|---|---|
| RMSEx (m) | 0.014 | 0.009 |
| RMSEy (m) | 0.016 | 0.013 |
| RMSEz (m) | 0.026 | 0.022 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Capolupo, A. Accuracy Assessment of Cultural Heritage Models Extracting 3D Point Cloud Geometric Features with RPAS SfM-MVS and TLS Techniques. Drones 2021, 5, 145. https://doi.org/10.3390/drones5040145
Capolupo A. Accuracy Assessment of Cultural Heritage Models Extracting 3D Point Cloud Geometric Features with RPAS SfM-MVS and TLS Techniques. Drones. 2021; 5(4):145. https://doi.org/10.3390/drones5040145
Chicago/Turabian StyleCapolupo, Alessandra. 2021. "Accuracy Assessment of Cultural Heritage Models Extracting 3D Point Cloud Geometric Features with RPAS SfM-MVS and TLS Techniques" Drones 5, no. 4: 145. https://doi.org/10.3390/drones5040145
APA StyleCapolupo, A. (2021). Accuracy Assessment of Cultural Heritage Models Extracting 3D Point Cloud Geometric Features with RPAS SfM-MVS and TLS Techniques. Drones, 5(4), 145. https://doi.org/10.3390/drones5040145