
Long Distance Ground Target Tracking with Aerial Image-to-Position Conversion and Improved Track Association


Abstract
:1. Introduction
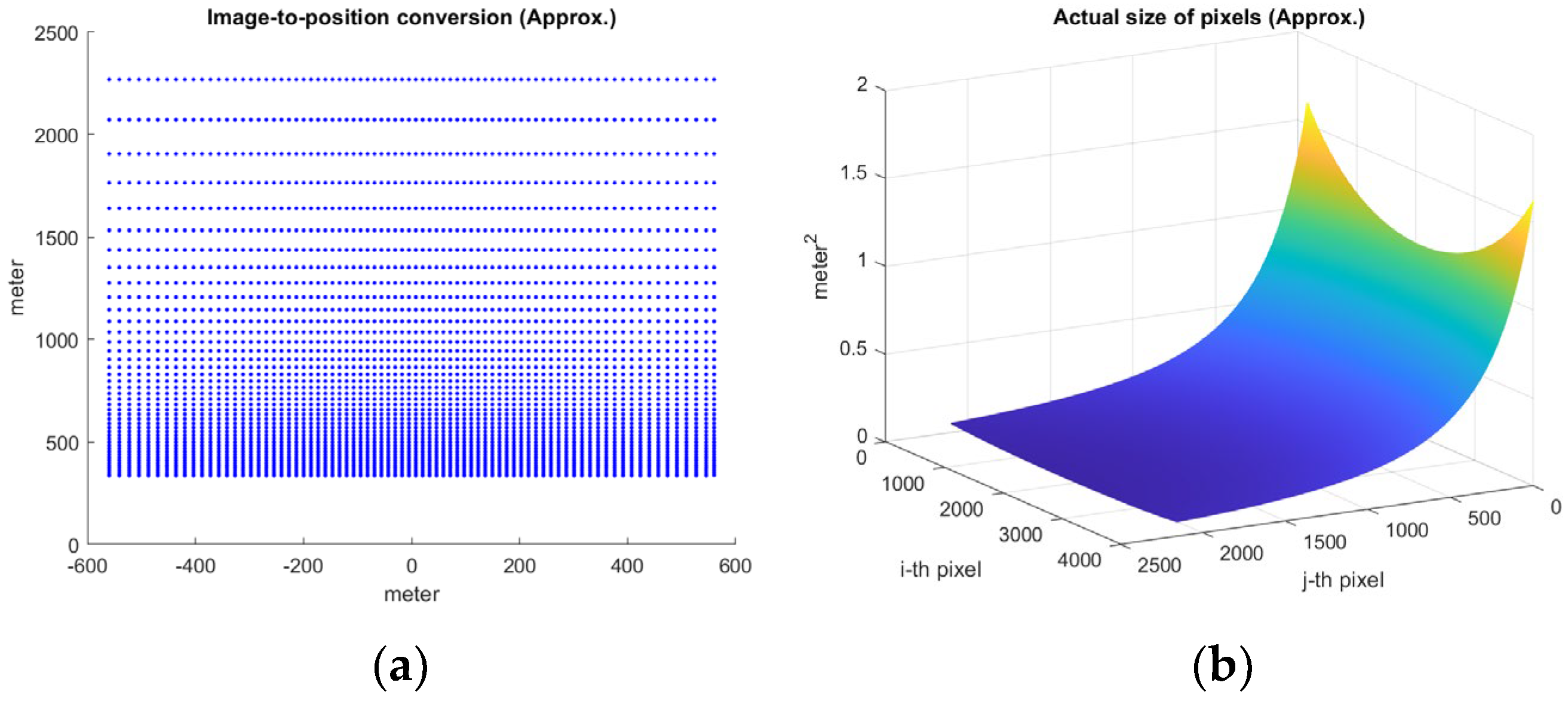
2. Image-Position Conversion
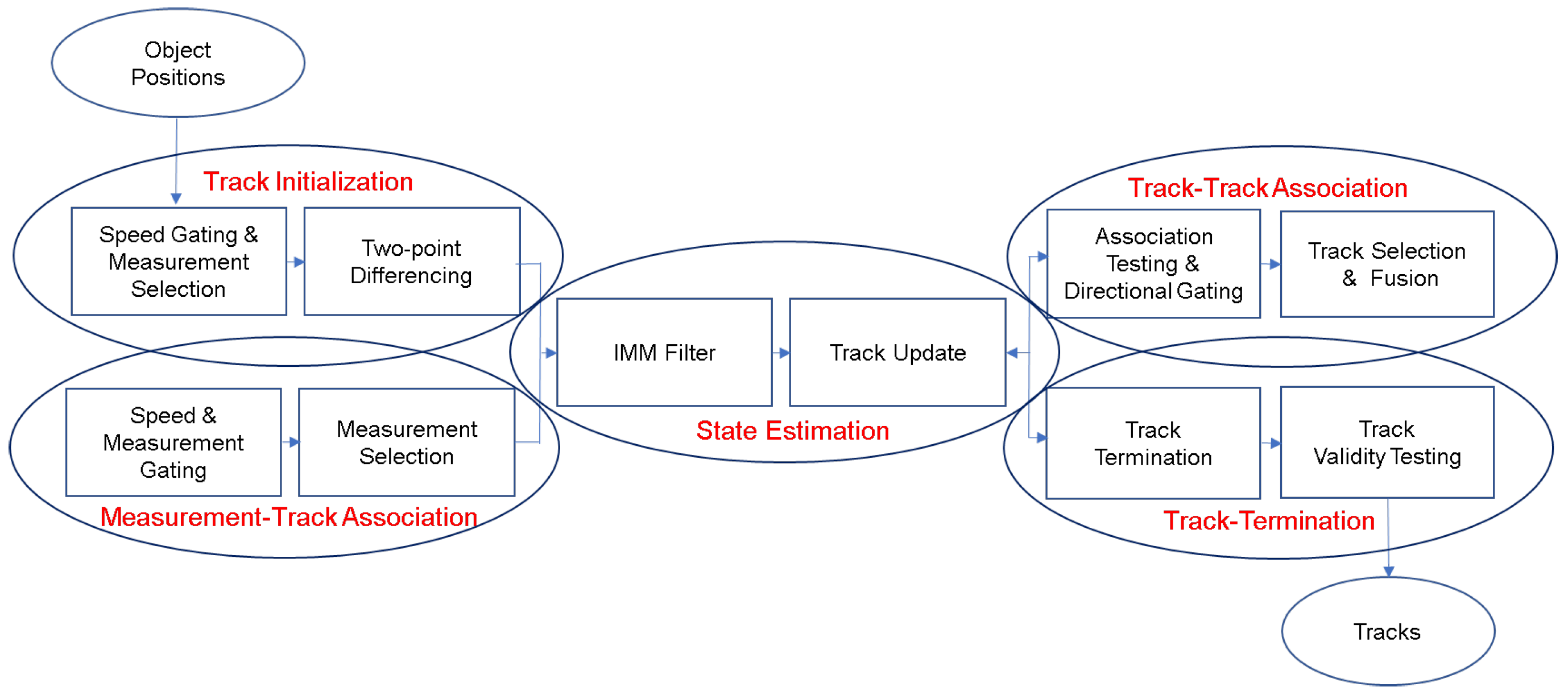
3. Multiple Target Tracking
4. Improved Track Association
5. Results
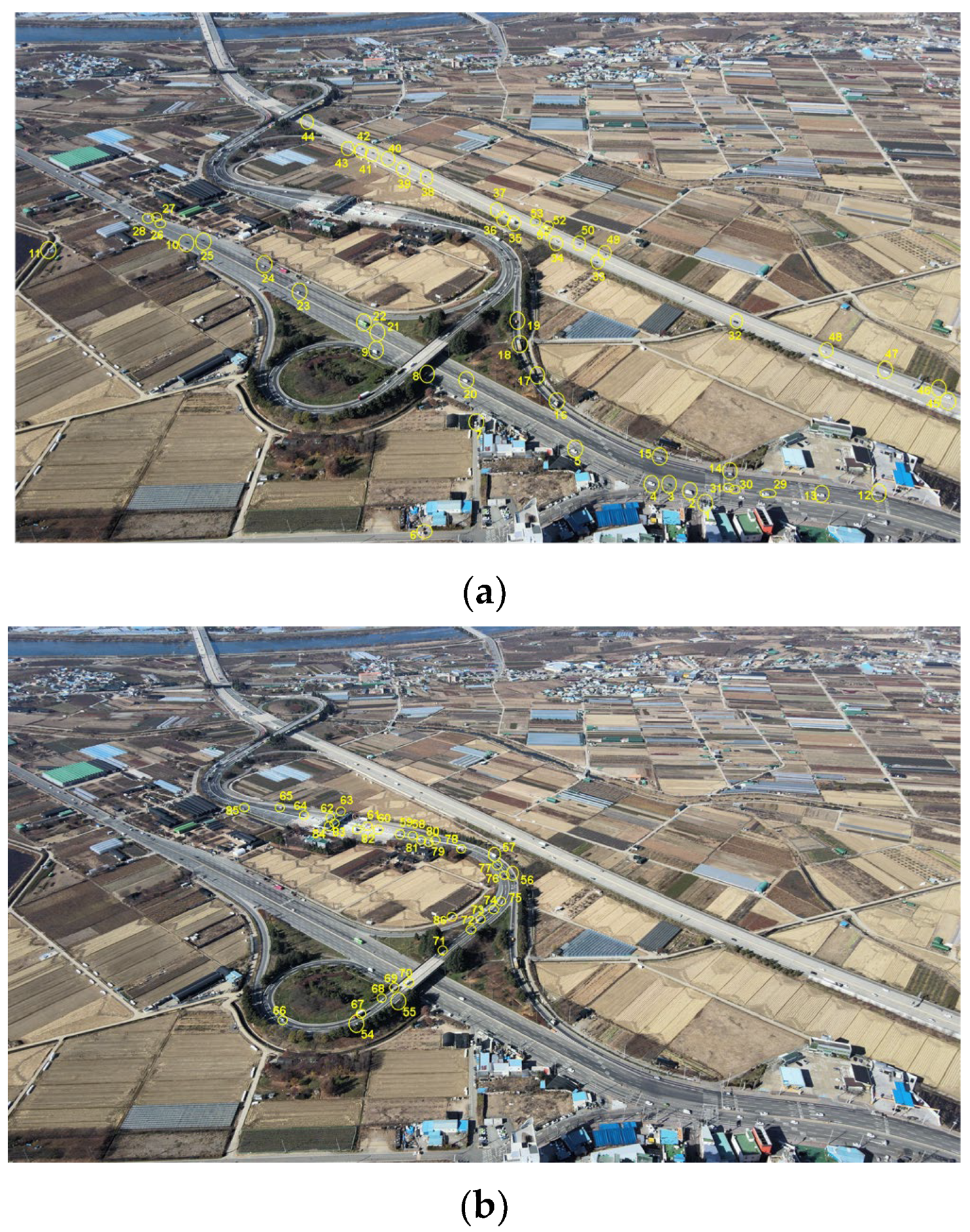
5.1. Video Description and Moving Object Detection
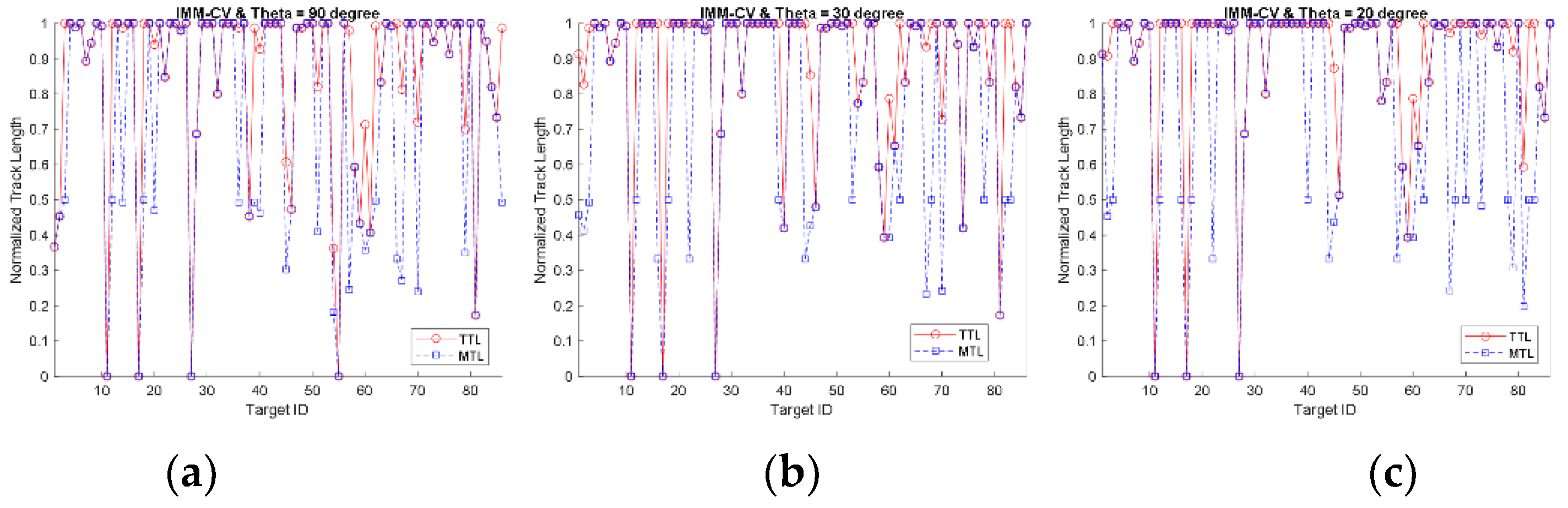
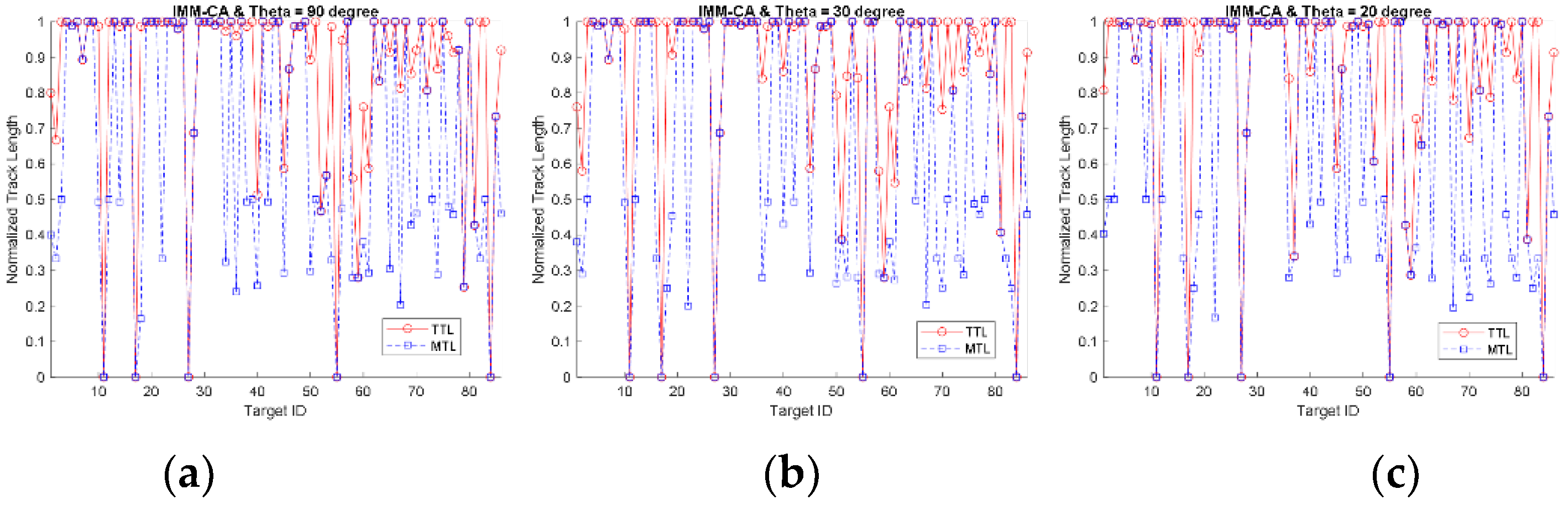
5.2. Multiple Target Tracking
6. Discussion
7. Conclusions
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV assistance paradigm: State-of-the-art in applications and challenges. J. Netw. Comput. Appl. 2020, 166, 102706. [Google Scholar] [CrossRef]
- Zaheer, Z.; Usmani, A.; Khan, E.; Qadeer, M.A. Aerial surveillance system using UAV. In Proceedings of the 2016 Thirteenth International Conference on Wireless and Optical Communications Networks (WOCN), Hyderabad, India, 21–23 July 2016; pp. 1–7. [Google Scholar]
- Theys, B.; Schutter, J.D. Forward flight tests of a quadcopter unmanned aerial vehicle with various spherical body diameters. Int. J. Micro Air Veh. 2020, 12, 1–8. [Google Scholar] [CrossRef]
- Li, S.; Yeung, D.-Y. Visual object tracking for unmanned aerial vehicles: A benchmark and new motion models. In Proceedings of the Thirty-Frist AAAI Conference on Artificial Intelligence (AAAI-17), San Francisco, CA, USA, 4–9 February 2017; pp. 4140–4146. [Google Scholar]
- Du, D.; Qi, Y.; Yu, H.; Yang, Y.; Duan, K.; Li, G.; Zhang, W.; Huang, Q.; Tian, Q. The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking. Lect. Notes Comput. Sci. 2018, 375–391. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Lei, Z.; Wang, G.; Hwang, J. Eye in the Sky: Drone-Based Object Tracking and 3D Localization. In Proceedings of the 27th ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; pp. 899–907. [Google Scholar] [CrossRef] [Green Version]
- Lo, L.-Y.; Yiu, C.H.; Tang, Y.; Yang, A.-S.; Li, B.; Wen, C.-Y. Dynamic Object Tracking on Autonomous UAV System for Surveillance Applications. Sensors 2021, 21, 7888. [Google Scholar] [CrossRef]
- Zhang, S.; Zhuo, L.; Zhang, H.; Li, J. Object Tracking in Unmanned Aerial Vehicle Videos via Multifeature Discrimination and Instance-Aware Attention Network. Remote. Sens. 2020, 12, 2646. [Google Scholar] [CrossRef]
- Kouris, A.; Kyrkou, C.; Bouganis, C.-S. Informed Region Selection for Efficient UAV-Based Object Detectors: Altitude-Aware Vehicle Detection with Cycar Dataset. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–9 November 2019; pp. 51–58. [Google Scholar]
- Kamate, S.; Yilmazer, N. Application of Object Detection and Tracking Techniques for Unmanned Aerial Vehicles. Proc. Comput. Sci. 2015, 61, 436–441. [Google Scholar] [CrossRef] [Green Version]
- Fang, P.; Lu, J.; Tian, Y.; Miao, Z. An Improved Object Tracking Method in UAV Videos. Procedia Eng. 2011, 15, 634–638. [Google Scholar] [CrossRef]
- Jianfang, L.; Hao, Z.; Jingli, G. A novel fast target tracking method for UAV aerial image. Open Phys. 2017, 15, 420–426. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Tang, W.; Ding, Z. Long-Term Target Tracking of UAVs Based on Kernelized Correlation Filter. Mathematics 2021, 9, 3006. [Google Scholar] [CrossRef]
- Mueller, M.; Sharma, G.; Smith, N.; Ghanem, B. Persistent Aerial Tracking system for UAVs. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1562–1569. [Google Scholar] [CrossRef]
- Li, Y.; Doucette, E.A.; Curtis, J.W.; Gans, N. Ground target tracking and trajectory prediction by UAV using a single camera and 3D road geometry recovery. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1238–1243. [Google Scholar] [CrossRef]
- Guido, G.; Gallelli, V.; Rogano, D.; Vitale, A. Evaluating the accuracy of vehicle tracking data obtained from Unmanned Aerial Vehicles. Int. J. Transp. Sci. Technol. 2016, 5, 136–151. [Google Scholar] [CrossRef]
- Rajasekaran, R.K.; Ahmed, N.; Frew, E. Bayesian Fusion of Unlabeled Vision and RF Data for Aerial Tracking of Ground Targets. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1629–1636. [Google Scholar]
- Upadhyay, J.; Rawat, A.; Deb, D. Multiple Drone Navigation and Formation Using Selective Target Tracking-Based Computer Vision. Electronics 2021, 10, 2125. [Google Scholar] [CrossRef]
- Leira, F.S.; Helgensen, H.H.; Johansen, T.A.; Fossen, T.I. Object detection, recognition, and tracking from UAVs using a thermal camera. J. Field Robot. 2021, 38, 242–267. [Google Scholar] [CrossRef]
- Helgesen, H.H.; Leira, F.S.; Johansen, T.A. Colored-Noise Tracking of Floating Objects using UAVs with Thermal Cameras. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 651–660. [Google Scholar] [CrossRef] [Green Version]
- Yeom, S.; Cho, I.-J. Detection and Tracking of Moving Pedestrians with a Small Unmanned Aerial Vehicle. Appl. Sci. 2019, 9, 3359. [Google Scholar] [CrossRef] [Green Version]
- Yeom, S.; Nam, D.-H. Moving Vehicle Tracking with a Moving Drone Based on Track Association. Appl. Sci. 2021, 11, 4046. [Google Scholar] [CrossRef]
- Yeom, S. Moving People Tracking and False Track Removing with Infrared Thermal Imaging by a Multirotor. Drones 2021, 5, 65. [Google Scholar] [CrossRef]
- Yeom, S. Long Distance Moving Vehicle Tracking with a Multirotor Based on IMM-Directional Track Association. Appl. Sci. 2021, 11, 11234. [Google Scholar] [CrossRef]
- Blom, H.A.P.; Bar-shalom, Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Houles, A.; Bar-Shalom, Y. Multisensor Tracking of a Maneuvering Target in Clutter. IEEE Trans. Aerospace Electron. Syst. 1989, 25, 176–189. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking: Principles and Techniques; YBS Publishing: Storrs, CT, USA, 1995. [Google Scholar]
- Babinec, A.; Jiří, A. On accuracy of position estimation from aerial imagery captured by low-flying UAVs. Int. J. Transp. Sci. Technol. 2016, 5, 152–166. [Google Scholar] [CrossRef]
- Cai, Y.; Ding, Y.; Zhang, H.; Xiu, J.; Liu, Z. Geo-Location Algorithm for Building Targets in Oblique Remote Sensing Images Based on Deep Learning and Height Estimation. Remote Sens. 2020, 12, 2427. [Google Scholar] [CrossRef]
- Yeom, S.-W.; Kirubarajan, T.; Bar-Shalom, Y. Track segment association, fine-step IMM and initialization with doppler for improved track performance. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 293–309. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking, part I: Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Available online: https://map.naver.com/v5/search/%EA%B2%BD%EC%82%B0ic?c=14336187.1023075,4283701.1549134,15,0,0,1,dh (accessed on 31 January 2022).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | IMM-CV | IMM-CA | |
|---|---|---|---|
| Sampling time | 1/15 s | ||
| Max. target speed for initialization, Vmax | 60 m/s | ||
| Process noise variance | 1 m/s2 | 0.01 m/s2 | |
| 10 m/s2 | 0.1 m/s2 | ||
| Mode transition probabiltiy pij | |||
| 1.5 m | |||
| Measurent association | 8 | ||
| Max. target speed, Smax | 80 m/s | ||
| Track association | 100 | ||
| 90°, 30°, 20° | |||
| Track termination | Max. searching number | 20 frames (1.33 s) | |
| Min. target speed | 1 m/s | ||
| Min. track life length for track validity | |||
| IMM-CV | |||
|---|---|---|---|
| Number of tracks | 173 | 185 | 192 |
| Number of associated tracks | 106 | 108 | 111 |
| Avg. TTL | 0.851 | 0.885 | 0.910 |
| Avg. MTL | 0.747 | 0.770 | 0.782 |
| Avg. TTL w/o missing targets | 0.892 | 0.9176 | 0.943 |
| Avg. MTL w/o missing targets | 0.783 | 0.798 | 0.810 |
| Number of missing targets | 4 | 3 | 3 |
| IMM-CA | |||
|---|---|---|---|
| Number of tracks | 196 | 208 | 209 |
| Number of associated tracks | 129 | 133 | 133 |
| Avg. TTL | 0.849 | 0.858 | 0.861 |
| Avg. MTL | 0.656 | 0.660 | 0.668 |
| Avg. TTL w/o missing targets | 0.901 | 0.911 | 0.914 |
| Avg. MTL w/o missing targets | 0.697 | 0.700 | 0.709 |
| Number of missing targets | 5 | 5 | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeom, S. Long Distance Ground Target Tracking with Aerial Image-to-Position Conversion and Improved Track Association. Drones 2022, 6, 55. https://doi.org/10.3390/drones6030055
Yeom S. Long Distance Ground Target Tracking with Aerial Image-to-Position Conversion and Improved Track Association. Drones. 2022; 6(3):55. https://doi.org/10.3390/drones6030055
Chicago/Turabian StyleYeom, Seokwon. 2022. "Long Distance Ground Target Tracking with Aerial Image-to-Position Conversion and Improved Track Association" Drones 6, no. 3: 55. https://doi.org/10.3390/drones6030055
APA StyleYeom, S. (2022). Long Distance Ground Target Tracking with Aerial Image-to-Position Conversion and Improved Track Association. Drones, 6(3), 55. https://doi.org/10.3390/drones6030055