1. Introduction
UAVs have been implemented to various applications from aerial patrolling, mapping, aerial videography, crop spraying, package delivery, and many others. Nowadays, cooperative UAVs consisting of several UAVs are more effective than a single UAV system because with the cooperative UAVs, many challenging tasks can be accomplished efficiently. For example, in the case of simultaneous UAVs on target mission, the necessary information can be collected simultaneously by UAV formation from several points of different areas.
The flight path optimization is also one of main issue for sustainable transportation of aircraft [
1]. The focus to achieve sustainable flight trajectories can be focused toward generating a curvilinear path that can be followed by a realistic aircraft compared with an approximated straight-line path. Generating the curvilinear motion of the aircraft is a very challenging computational problem because the aircraft has many constraints to be considered in finding the feasible path motion. Khardi et al. [
2] has reported that flight path optimization can be conducted to reduce the impact of aircraft noise, fuel costs, and gas emissions. Thus, flight trajectories optimization become very important research to be conducted to achieve the sustainability of aircrafts and the UAVs trajectories.
The UAV technologies still face a challenge to achieve a complete autonomous unmanned flying robot [
3]. The main challenges are the path planning and the obstacle avoidance. In general, the UAV can be grouped into two categories, which are a rotor-craft UAV and a fixed-wing UAV. The fixed-wing UAV has the capability to flight over long distances while the rotorcraft has good maneuverability but has an issue of short flight duration. The strategies to generate a flyable path is a challenging computational problem. For the fixed-wing UAV, due to the kinematic constraints, a feasible flight path cannot be generated by using simply way points [
4].
Since UAV motion planning is a very important research topic to improve the level of autonomy of small UAVs, it becomes a hot topic. Some previous papers addressed the UAV motion planning by considering only the kinematic constraint; however, the generated trajectory by this approach may not yield practical trajectory because it does not consider the time-varying dynamics constraints such as the speed range, the roll angle, load factor, etc. [
5]. Shanmugavel et al. [
6] developed a methodology to solve a path planning of a UAVs swarm for simultaneous arrival on target. An iterative method was employed in the flyable PH path generation with the length of path close to the Dubins path to fulfil the minimum length. The arc segment of the Dubins path was replaced with with clothoid arcs which have a ramp curvature profile to satisfy the curvature continuity in [
7]. Oh et al. [
8] presented a road-network route planning to solve the Chinese postman problem. To find the minimum flight time, a multi-choice multi-dimensional knapsack problem was formulated and solved using solved via mixed integer linear programming. The Dubins theory was used to generate the path. Liao et al. [
9] proposed a path planning algorithm for computing a location of circular path between a target and a UAV according to range of a UAV target and a bearing angle when the UAV flight at a constant altitude. Transition path planning considering the minimum turning radius was proposed for transition between the circular path to satisfy the UAV flyability.
Koyuncu et al. [
10] addressed the problem of generating agile maneuver for Unmanned Combat Aerial Vehicles using the Rapidly Random Tree (RRT). B-spline avoiding collision path was searched by generating the random node by executing RRT algorithm. Then, the feasible B-spline was searched by checking first and second derivatives which correspond to the velocities and acceleration, respectively. If they are within the flight envelope, the generated path was dynamically feasible. Re-planning the trajectory was necessary if the feasible path could not be revised during the maneuver planning.
Babel et al. [
11] addressed the UAV cooperative path planning where the UAV should arrive at the destination points simultaneously with specified time delays with minimum total mission time. A network-based routing model was applied to obtain shortest flight paths at a constant altitude. The algorithms that did not decouple assignment and path planning was developed. A linear bottleneck assignment with fitness of the tasks corresponding to shortest flight paths length was formulated.
Chen et al. [
12] addressed the problem of formation control of fixed-wing UAVs swarm at a constant altitude. A group-based hierarchical architecture was generated among the UAVs. The UAVs decomposed into several distinct and non-overlapping groups. A virtual target moving along its expected path was assigned to a UAV group leader and an updating law was developed to coordinate the virtual targets of group leaders. The control law of the distributed leader-following formation was proposed for the follower UAVs.
Meta-heuristic optimizations techniques have shown as very promising methods to solve the UAV path planning. Machmudah and Parman [
13] presented the collision avoidance algorithm for different type of obstacles geometries. The GA and the GWO had been implemented to find the optimal route of the Bezier curve. The proposed collision avoidance algorithm can be implemented for applications of UAV, robotics, and manufacturing system by further considering the mathematical model and constraints of the systems. The GA was applied to collision avoidance path of single UAV considering the curvature constraint in [
14]. In their paper, they did not discuss the flight trajectory generation. Machmudah et al. [
15] presented path planning and trajectory planning of single UAV using the GA. Minimum path planning with Bezier curve and trajectory generation using third-degree polynomial with four unknown searching variables were developed. Dewangan et al. [
16] presented three-dimension UAV path planning using the GWO. The feasible path considering collision avoidance among obstacles and other UAVs. The comparison of GWO with well-known deterministic algorithms, which were Dijkstra,
A*, and
D*, and several meta-heuristic algorithms, was investigated. Zhang et al. [
17] proposed an improved adaptive GWO to solve the 3D path planning of UAV in the complex environment of package delivery in earthquake-stricken area. An adaptive convergence factor adjustment and an adaptive weight factor were proposed to update the position of individuals.
The UAV motion planning considering a flight mechanics to accommodate a UAV flight performance had been considered in [
15,
18,
19,
20,
21,
22]. Yu et al. [
18] applied Bezier Curve-Based Shaping (BCBS) to generate 3D cooperative trajectories for the UAVs. The minimum flight time trajectories generation satisfying dynamic and collision avoidance constraints was addressed. Using the BCBS as initial values for the Gauss pseudospectral method yielded a lower computational time than that of the direct solver. Ni et al. [
19] proposed trajectory optimization of a high-altitude long endurance solar-powered UAV using reinforcement learning. Commands of thrust, bank angle, and angle of attack when UAV flight at a constant altitude were implemented based on maximization of the energy. Adhikari and Ruiter [
20] presented the methodology for real-time autonomous obstacle avoidance for fixed-wing UAV where the UAV was required to keep close to a reference path. Finite horizon model predictive control was applied. A high-fidelity model and a lower-fidelity counterpart were studied. Zhardasti et al. [
5] addressed the problem of achieving the optimum time-dependent trajectory for UAV flying on a low-altitude terrain following (TF)/threat avoidance (TA) mission. a grid-based discrete scheme was implemented. An algorithm of a modified minimum cost network flow (MCNF) over a large-scale network is proposed. the four-dimensional (4D) trajectory consisting of three spatial and one-time dimensions from a source to a destination is obtained via minimization of a fitness functional subject to the nonlinear dynamics and mission constraints of the UAV. Adhikari and Ruiter [
21] presented the method for generating rapid feasible trajectory generation for the fixed-wing UAV where the dynamic equation of the UAV was simplified. The bounds on the simplified controls were formulated. The states and the controls variables were transformed as functions of
x;
y;
z and the velocity,
v. Sequential Convex Programming (SCP) and a custom solver for the Quadratic Programming (QP) were applied to solve the transformed problem.
With the capability of long endurance, the fixed wing UAV has been widely implemented for aerial monitoring and surveying. In this aerial covering purpose, the flight maneuver following the agile curvilinear path is necessary. The maneuver planning of the fixed-wing UAV is a challenging optimization problem because it has many constraints to be considered. Keeping the flight trajectories in the UAV operational area is the compulsory task where the wrong flight trajectories which are beyond the UAV flight operational area can bring serious damage or accident. For example, the fixed-wing UAV has the minimum speed to avoid it from a stall condition and the maximum speed that has come from the actuator constraint [
20,
22].
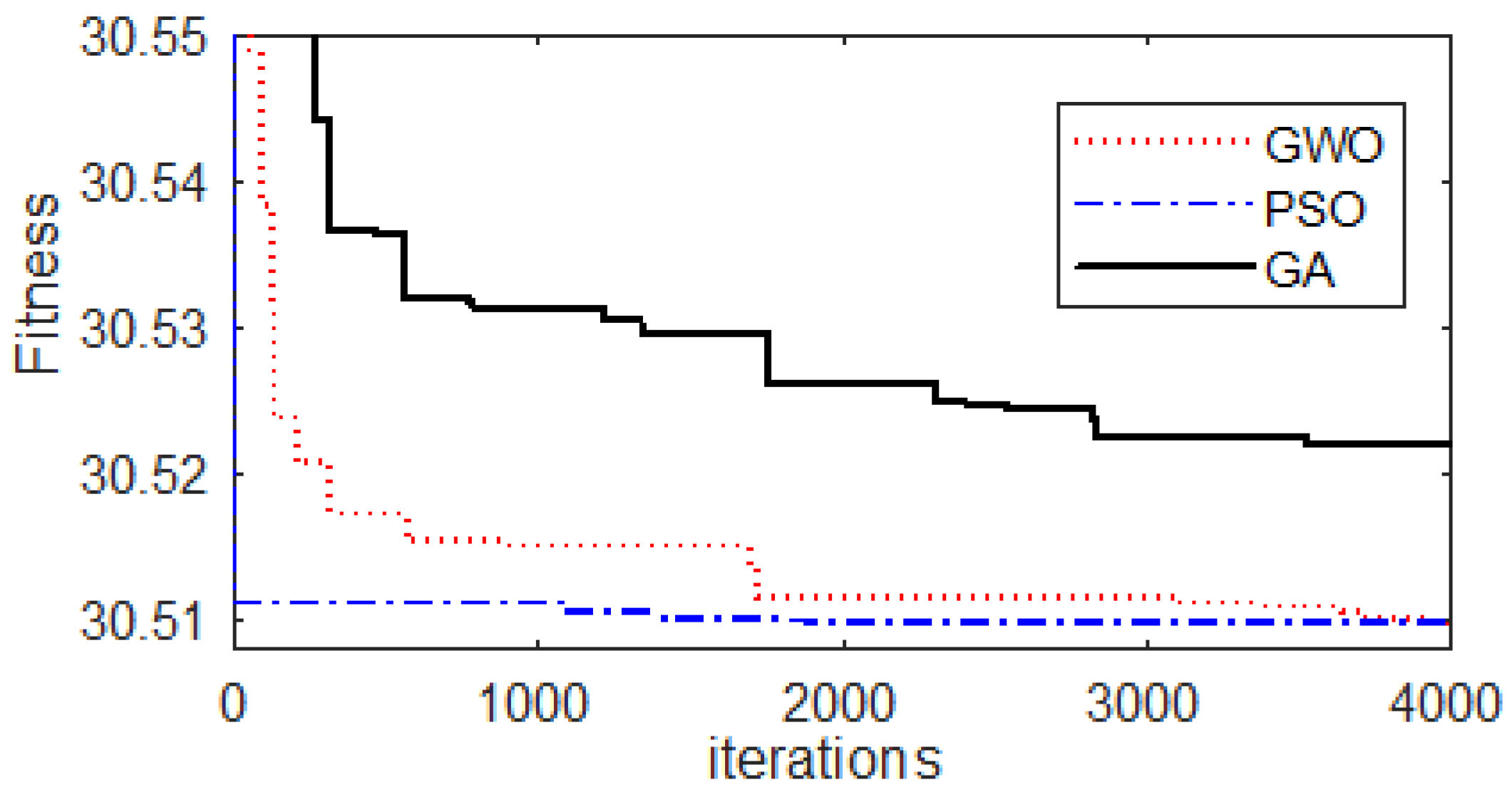
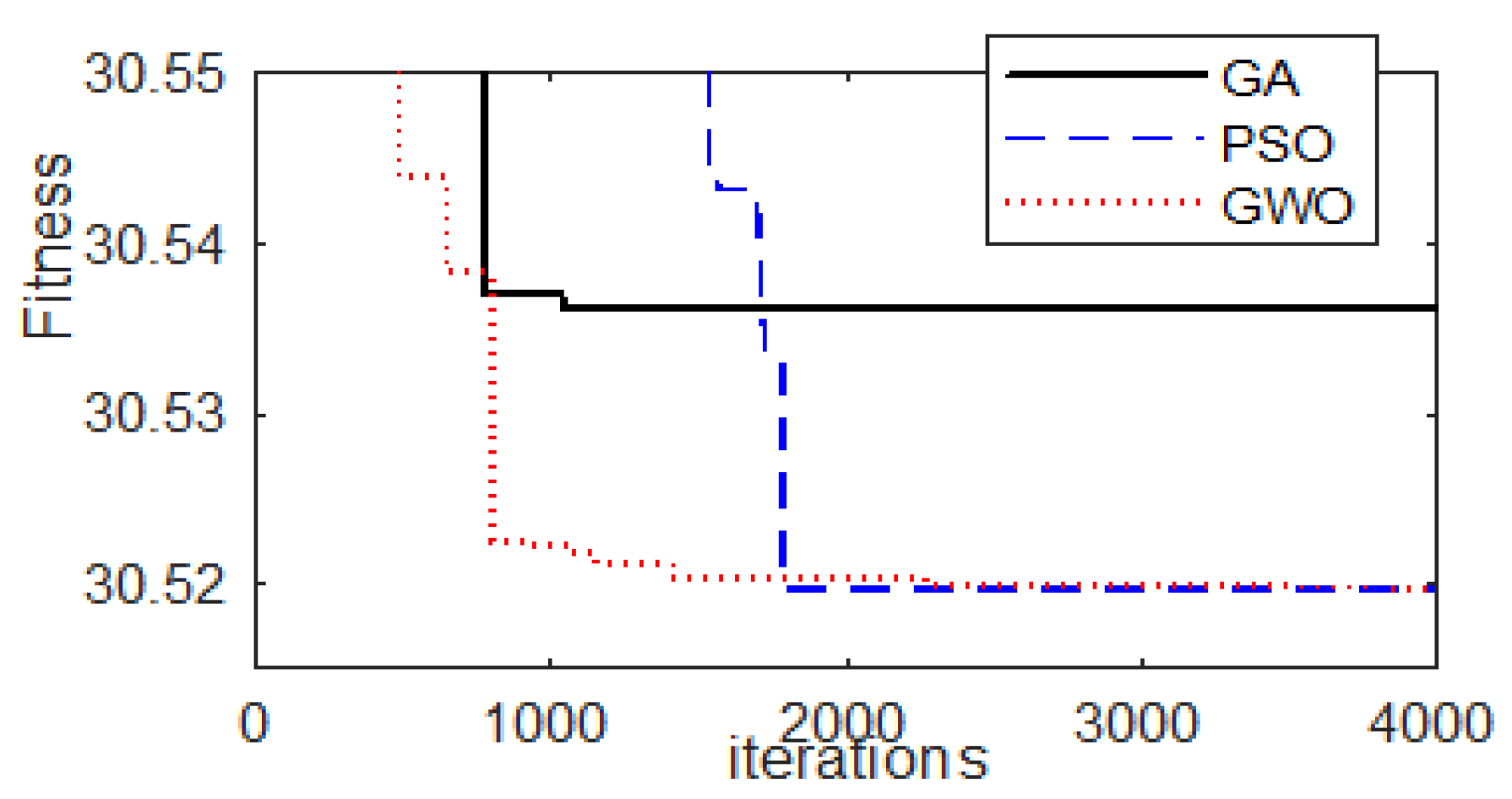
Motivating to improve the maneuvering capability of the conventional fixed-wing UAV, this paper addresses the UAV motion planning using the Bezier curve as the maneuvering path and the variable speed strategy as the flight trajectories generation. The conventional fixed-wing UAV has limitation in performing the bank-turn maneuver. The optimization problem with constraints should be formulated considering all UAV flight performance limitations. In contrast with gradient-based optimizations, the meta-heuristic optimizations do not depend on the derivative of search spaces [
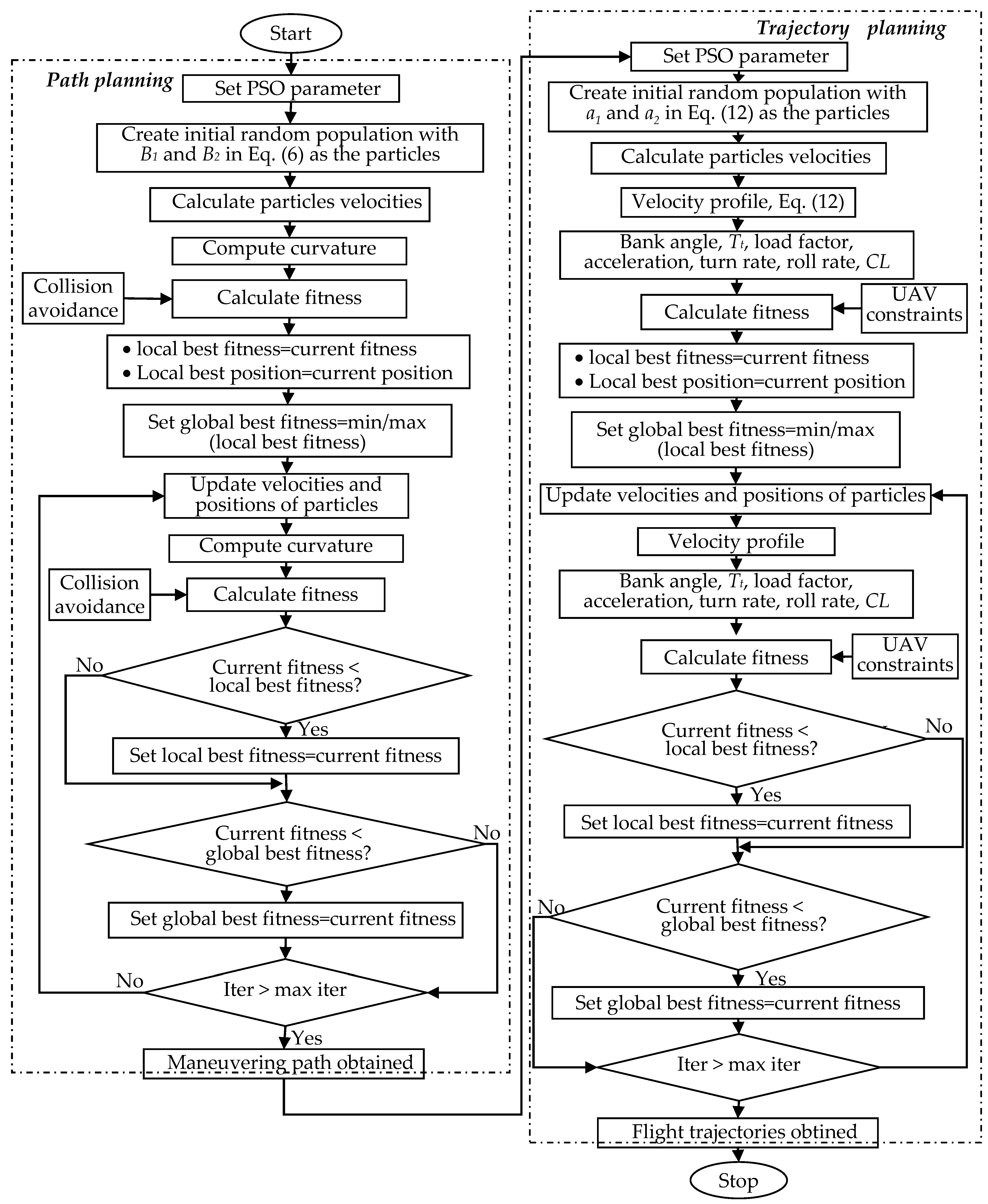
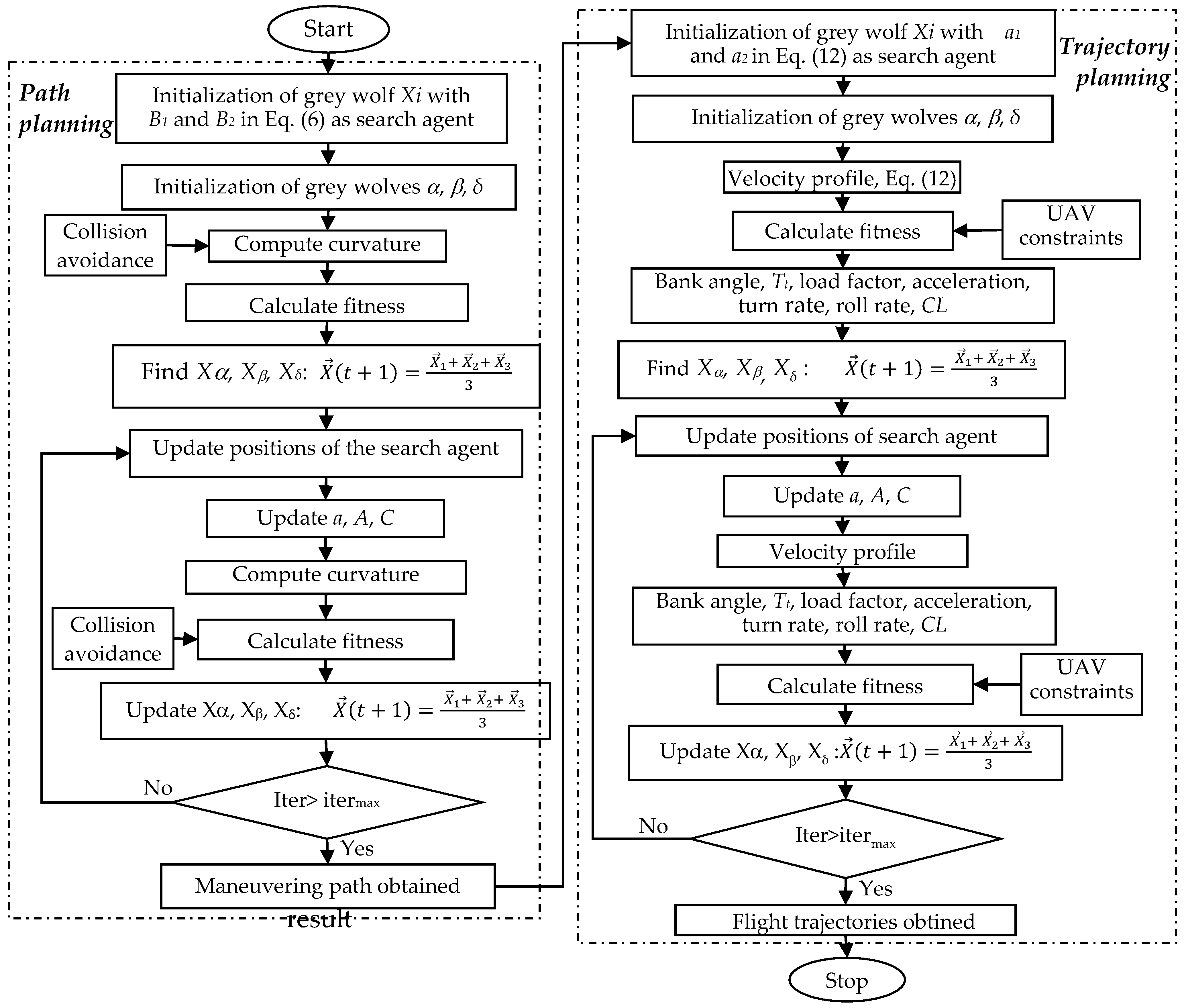
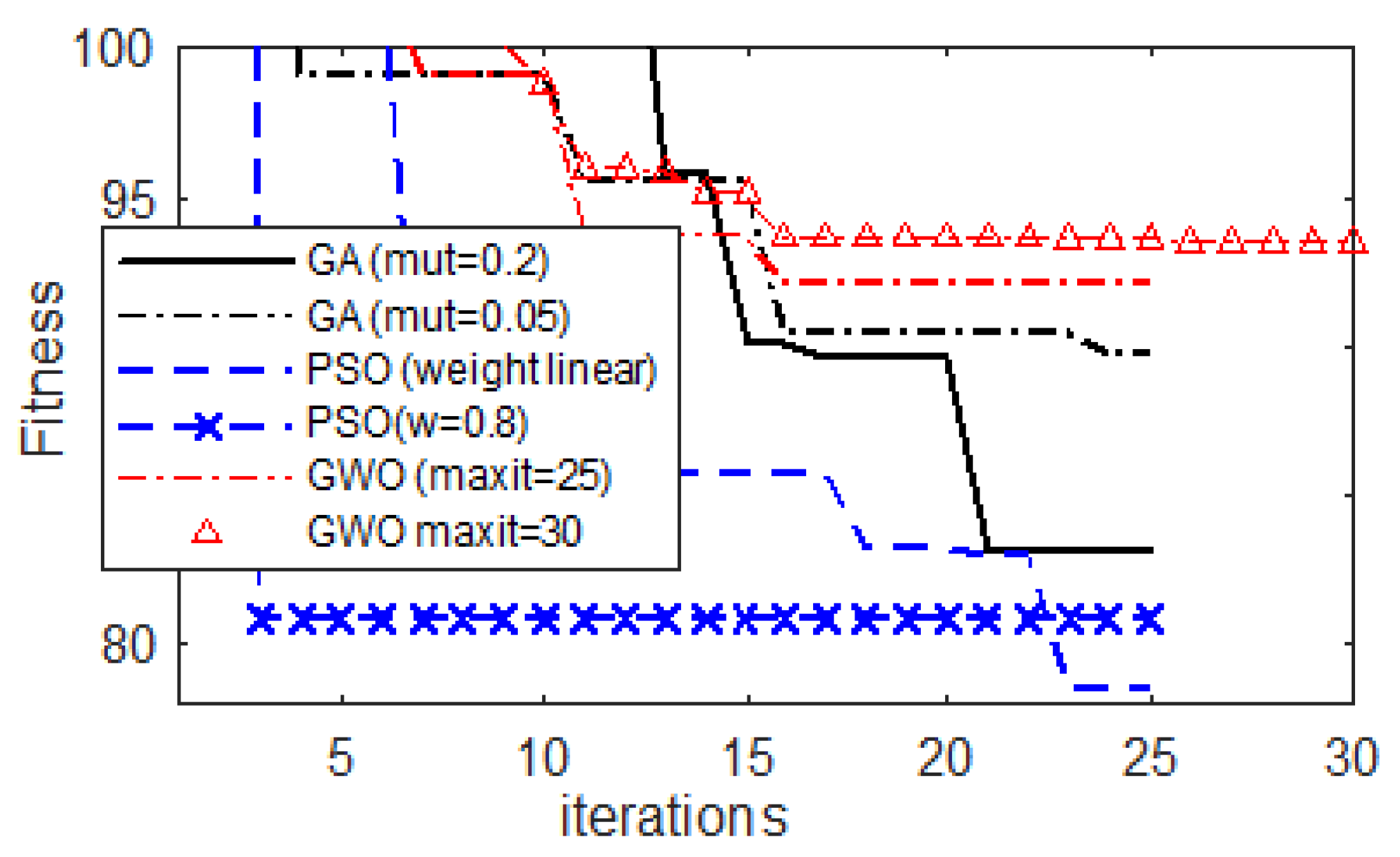
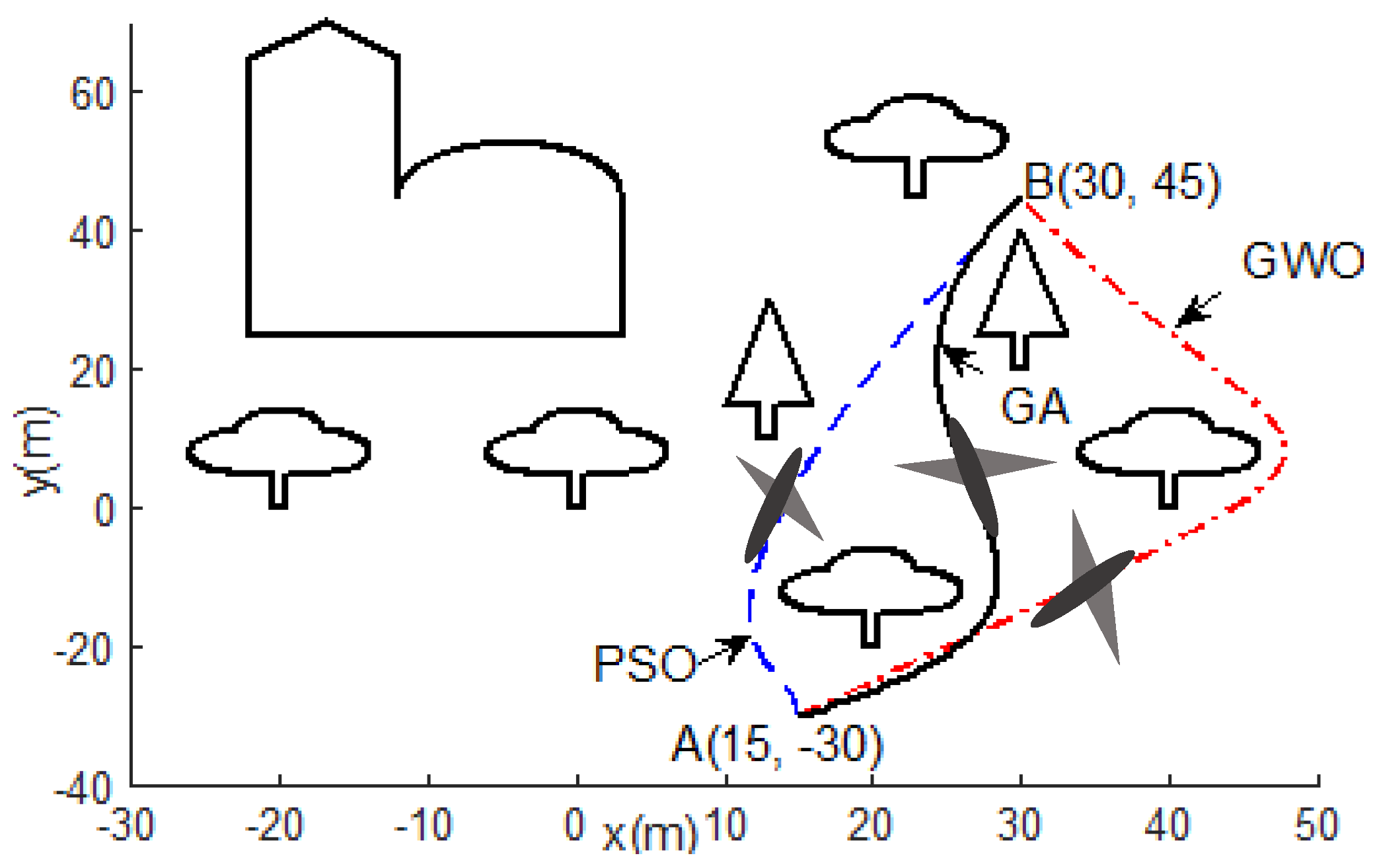
23]. Thus, the meta-heuristic optimizations become very promising methods to solve the real engineering problems which has many constraints to be satisfied, as in the case of UAV motion planning problems. The No Free Lunch (NFL) theorem applies to the meta-heuristic optimizations implying that there is no meta-heuristic method best appropriate to solve all optimization problems. A certain meta-heuristic algorithm may show a good performance on a set of optimization problems but having a poor performance on a different set of optimization problems. Thus, for a particular optimization problem, it is necessary to investigate the performance of some meta-heuristic optimizations. In this paper, the performance of three meta-heuristic optimizations, namely the GA, the PSO, and the GWO are investigated in solving the fixed-wing UAV motion planning.
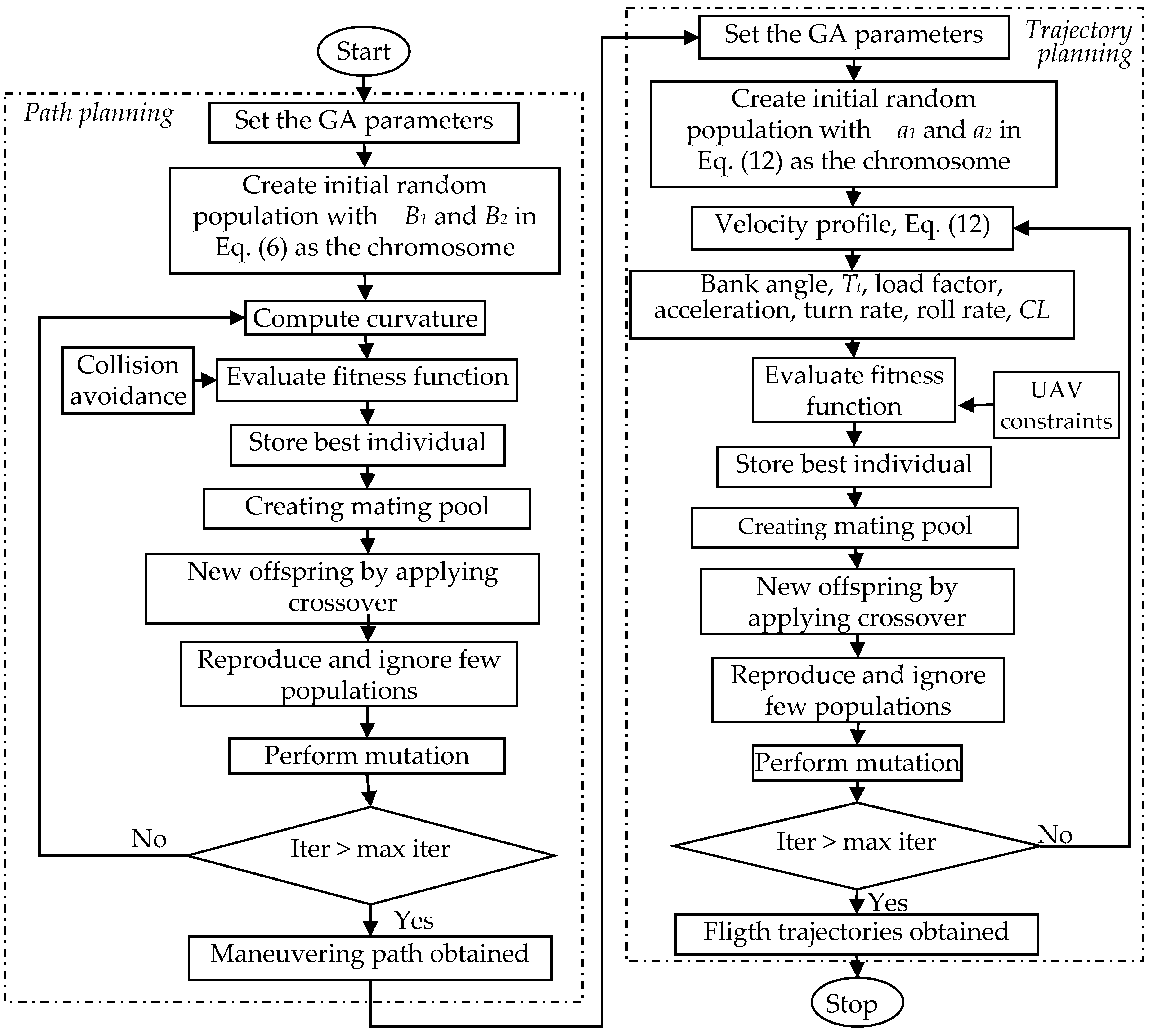
Bezier curve provides the agility and continuity to the flight path. The motion planning is conducted in two steps, which are the path planning and the flight trajectory planning. The path planning objective is to minimize the path length considering the curvature constraint and avoiding collision. Different with typically previous studies, in generating the curvilinear path, this paper does not employ either grid-based technique or RRT algorithm. The Bezier curve is generated directly by searching the optimal Bezier curve control points using meta-heuristic optimizations. The second step is to find the optimal time and load factor considering the flight trajectories constraints. The UAVs perform the Bezier agile path by performing the bank-turn maneuver where the speed and the bank angle, or the roll angle, need to be managed in such a way so that the flight trajectories are optimal and stay in the UAV safe zone. The variable speed is used to perform the bank-turn mechanism. The variable speed plays an important role not only in avoiding the collision with obstacles, but also in preventing an accident and road traffic, and obtaining an optimal time [
24].
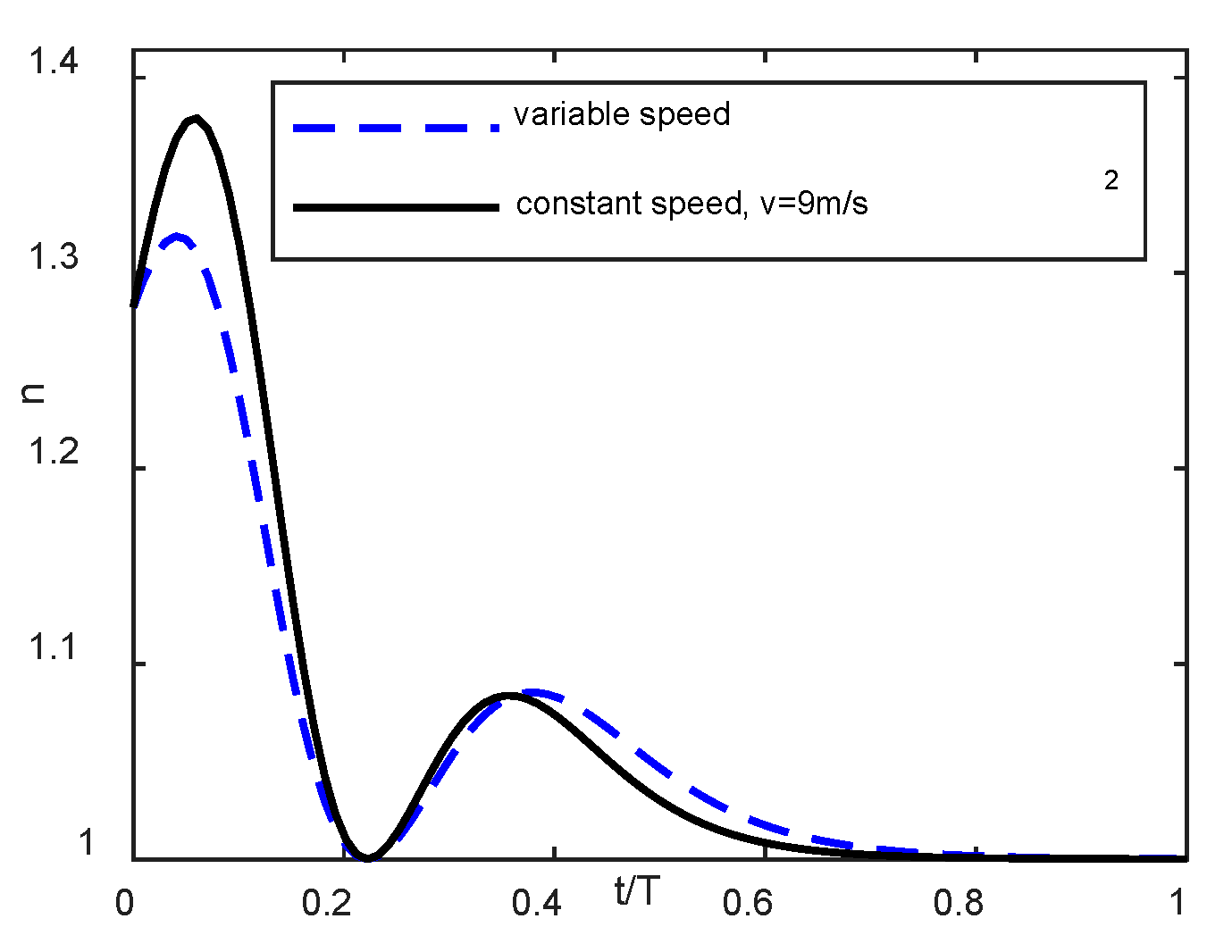
The contributions of this paper are as follows. This paper considers the flight trajectory generation using the variable speed strategy to reduce the load factor distribution during the UAV fixed-wing maneuvering in the normal and tangential coordinate. The load factor distribution plays an important role in the aircraft/UAV maneuvering; however, the load factor behavior during the UAV fixed-wing maneuver is very rarely discussed in studies. An excessive load factor should be avoided because it may indicate a flight operation that exceeds the structural strength [
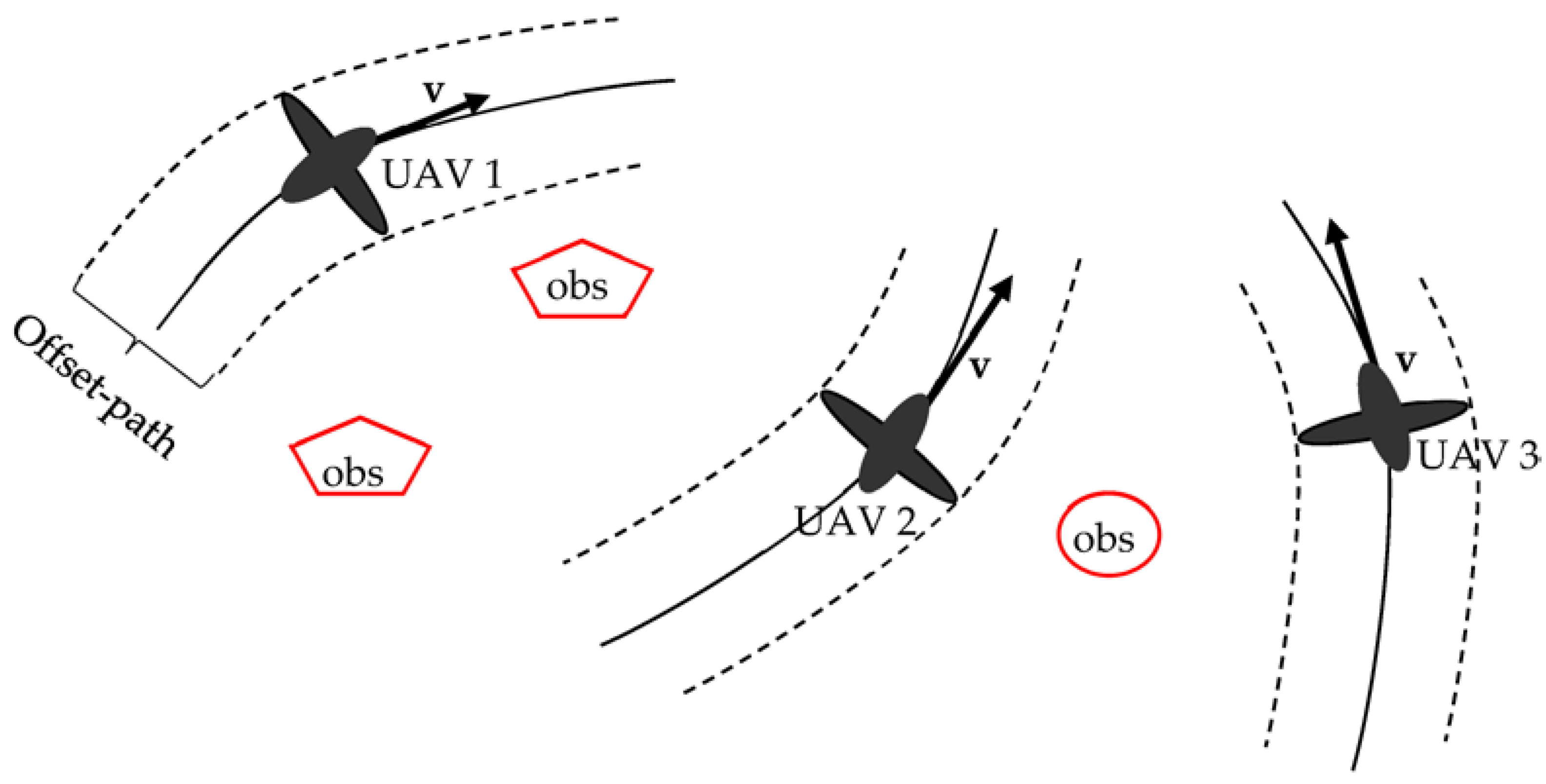
25]. The new computational strategies to generate the speed profile in the normal and tangential coordinate are presented using third-degree polynomials. Instead of only considering the kinematic constraints of the curvature path and collision avoidance, this paper considers the UAV flight constraints, which are the minimum/maximum speed, the minimum/maximum acceleration, the maximum roll angle, and the aerodynamics constraint so the generated trajectories are practically flyable. The trajectory planning is computed based on UAV flight mechanics. Compared with the previous research, the proposed variable speed trajectory generation has only two unknown searching variables. Furthermore, the generated speed trajectories are stable where during different running time, the generated trajectories of the meta-heuristic optimization are convergence. Secondly, the proposed variable speed strategy is applied to the swarm UAVs for simultaneous on target mission. The scenario of the swarm UAV to achieve the simultaneous on target mission using the proposed variable speed strategy is analyzed.
The presentation of the paper is organized as follows.
Section 2 presents the material and methods. The proposed path planning and trajectory planning strategies are presented. The variable speed maneuver is developed.
Section 3 presents the results and discussions. The single UAV maneuver planning and cooperative UAVs simultaneous on target mission are presented in the numerical simulations. Conclusions of the present paper are presented in
Section 4.
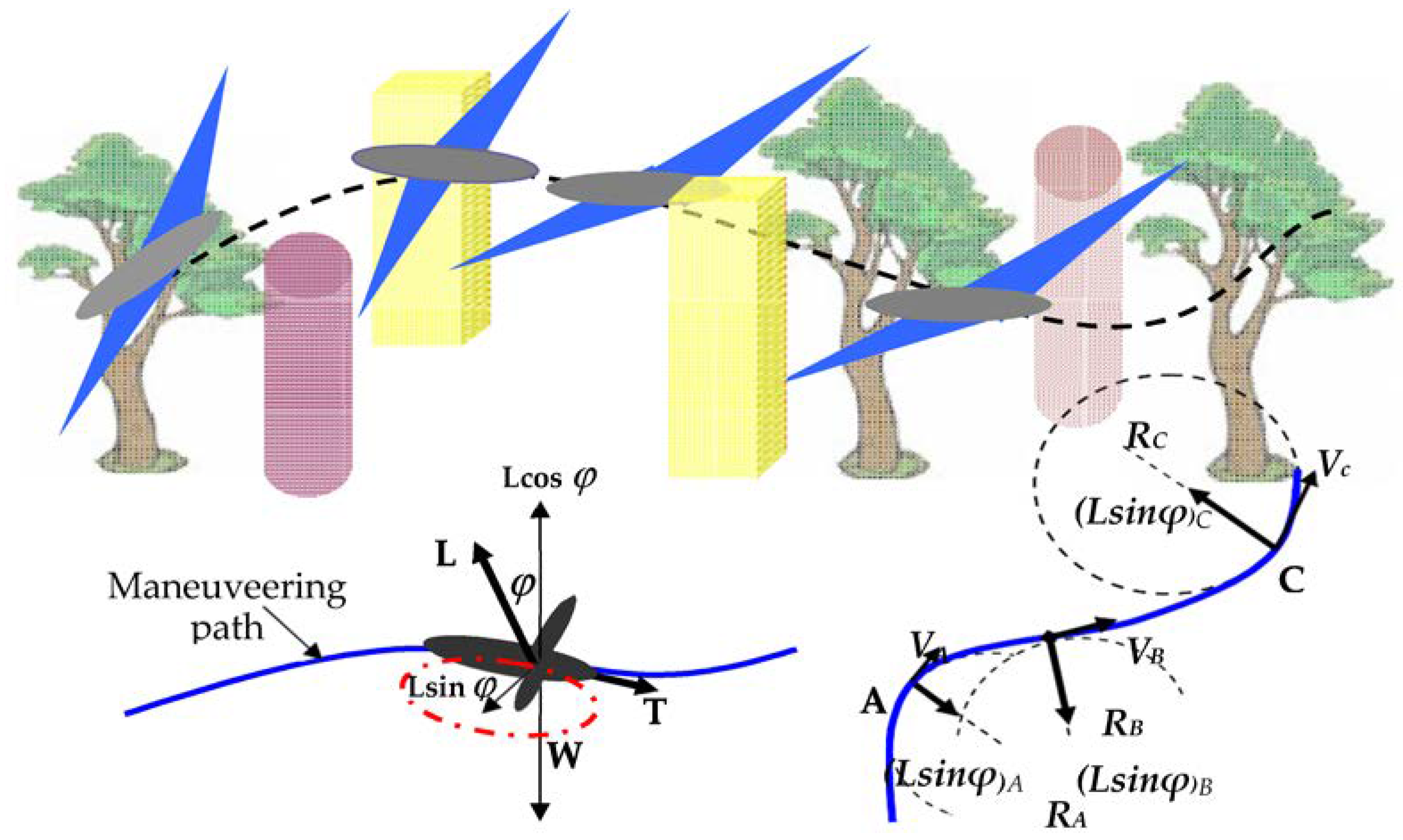
2. Materials and Methods
Figure 1 shows the UAV bank-turn maneuver following the curvilinear path. With the curvilinear path using the Bezier curve, the maneuvering path will be adaptable for difficult geometrical environment.
UAV equations of motion of bank-turn mechanism at constant altitude can be expressed as follows [
26,
27,
28]:
where
T,
D,
m,
a,
L,
,
g,
v, and
R are thrust, drag force, mass, acceleration, lift force, roll angle, gravitational acceleration, velocity, and radius of turn, respectively.
Equations (2) and (3) can be arranged as follows:
By definition, the load factor is expressed as follows:
where
n is the load factor.
2.1. Path Planning with Bezier Curve
Originally, the Bezier curve is one of the ab initio design methods developed by Pierre Bezier. Ab initio design is class of shape design problem that depends on both aesthetics and functional requirements. In recent developments, the Bezier curve has been widely utilized in the motion planning of the robot. It has control points which are very agile to be placed as needed in the surveying area.
The Bezier curve is expressed parametrically as follows [
18]:
where
Jn,
i(
t) is the
ith
nth order Bernstein basis function, and
u is curve parameter. To construct an
nth degree Bezier curve, it needs
n + 1 control points.
This paper uses the third-degree Bezier curve as the maneuvering path. The UAV has the turning radius limitation. The turning radius relates with the path parameter, namely the curvature. The curvature is very important in the curvilinear motion. The radius of the turn, R, will be equal to K = 1/R. Detail of the curvature constraint is presented in the next section.
The objective optimization of the path planning is the minimum path length. For the parametric curve, the path planning objective can be expressed as follows:
where
St,
x(
u) and
y(
u) are total of the maneuver path length, the equation of Bezier curve in the
x-component and
y-component at Equation (6).
2.2. Trajectory Planning
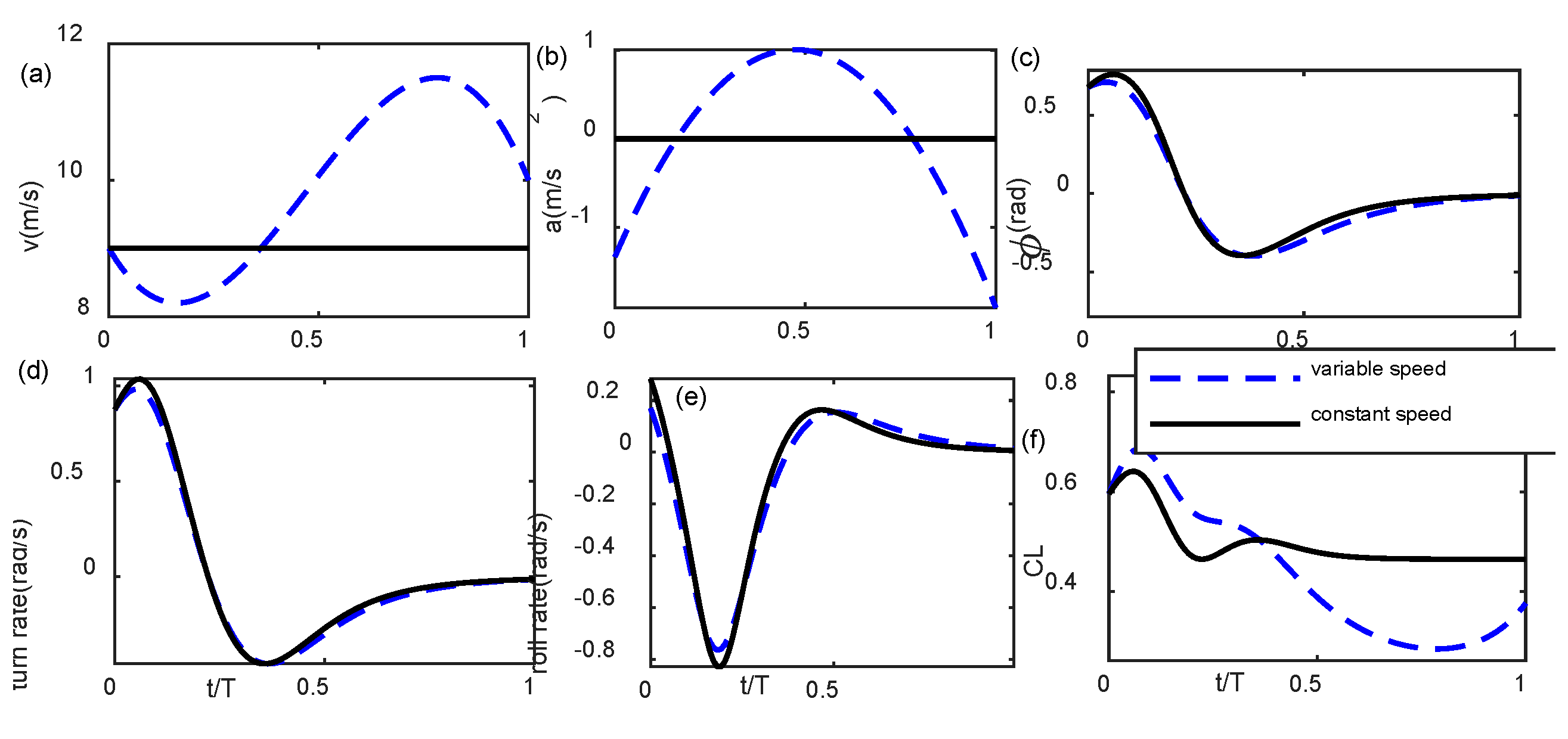
The flight maneuvering can be conducted using either constant speed or variable speed trajectories. This section develops computational strategies to generate the speed profile generation in normal-tangential coordinate. From the path planning, the geometry of the maneuvering curve can be determined, and the heading angle can be computed for the navigation purpose. After the path planning results have been obtained, the trajectory planning analysis in the normal and tangential coordinates is conducted.
Different from the rotor UAV which can hover in the air, the fixed-wing UAV can only move forward; therefore, at the constant altitude, the normal and tangential coordinate can be implemented for analyzing flight maneuvering.
Figure 2 illustrates the normal and tangential coordinates for the constant speed and the variable speed. The unit vector
with a positive direction is the same as the UAV movement and a unit vector
with a positive direction toward the radius center.
Velocity vector is only in tangential component as follows [
29]:
Acceleration vector consists of tangential and normal components as follows:
2.2.1. Constant Speed
Using the constant speed, the problem is simplified as to choose the constant speed, v, in such a way so that the trajectory optimization objective is achieved. The UAV traveling time can be obtained using the Newton law.
Considering the tangential component, the UAV maneuvering time can be obtained from the tangential component of velocity as follows:
The UAV maneuvering speed, vt, needs to be selected within the UAV speed range: [vmin, vmax]. The total curve length during the maneuvering, St, is obtained from the path-planning step.
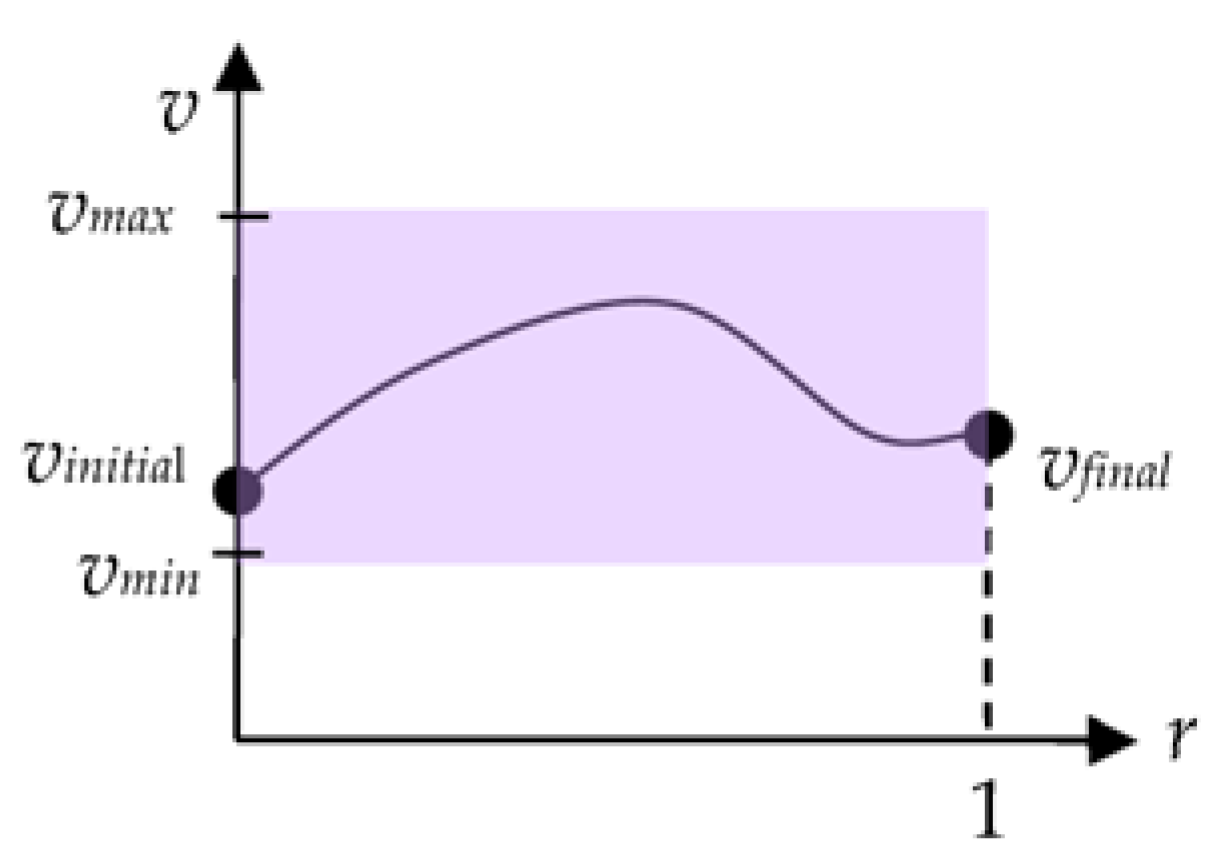
2.2.2. The Variable Speed Strategy
This paper considers the variable speed maneuvering where the speed trajectories profile is generated with the polynomial continuous function. The speed should be managed to stay in the UAV operational area while the flight trajectories are also kept to the optimum. This is a challenging optimization problem since the UAV speed can fall into very low value or very high value which is beyond the UAV operational area.
Figure 3 shows the illustration of this strategy. The initial speed,
vinitial, and final speed,
vfinal, are known and the speed profile should be managed in the UAV allowable speed zone.
This paper uses third-degree polynomial function in generating the speed profile. For third-degree polynomial, the speed equation is in the following
where
an is the
nth coefficient of polynomial and
r is linear time-scale,
, with
t is the time variable and
Tt is the total maneuvering time.
Substituting the conditions of initial speed and final speed, the following equations of coefficient polynomial can be obtained:
where
vi is the initial speed at
r = 0 and
vf is the final speed at
r = 1.
This paper considers known vi and vf so that there are two searching parameters, which are a1 and a2.
The UAV tangential acceleration is as follows:
The motion of the UAV can be analyzed using Newton’s law as follows:
With the linear timescale,
, so that
or
, Equation (16) can be expressed as follows:
2.3. Constraints
For the planar curve, there is a parameter which is called a curvature,
K. Its expression can be written as follows:
where
and
are the first derivative of
x,
y, and the second derivative of
x and
y, respectively. Since
K = 1/
R, the minimum turning radius constraint means the maximum
K,
Kmax.
The curvature constraint can be expressed in the following:
The speed and acceleration during the flight maneuver should be kept within the operational areas as follows:
where
vt,
vmin,
vmax,
amax, and
amin are the speed, the minimum speed, the maximum speed, the maximum acceleration, and the minimum acceleration, respectively.
The value of
amax can be obtained using Equation (1):
where
amax,
Tmax, and
Dmin are maximum acceleration, maximum thrust, and minimum drag force, respectively.
The minimum drag force can be obtained as follows
where
Dmin,
,
v,
S, and
Cd0 are the minimum drag force, air density, wing surface area, and minimum drag coefficient, respectively.
The UAV has the roll angle limitation which show the flight maneuvering ability as follows:
The positive and negative sign in Equation (24) are associated with the curvature value.
The maximum load factor constraint can be obtained from Equations (5) and (24) as follows:
This paper considers that UAV flying at positive load factor, thus the constraint of the load factor can be expressed:
The UAV has the turn rate constraint as follows:
where
and
are the turn rate and the maximum turn rate, respectively.
The value of maximum turn rate is obtained from:
Keeping the flight at constant altitude involves the requirement to manage the lift force. Thus, the coefficient of lift,
CL, should be considered also as the constraints in the following:
where
CL,
,
,
, and
S are the lift coefficient, the maximum lift coefficient, the minimum lift coefficient, an air density, and a wing area, respectively. The value of maximum/minimum
CL is obtained by substituting the value of maximum/minimum velocity and roll angle in value of
CL in Equation (30).
Speed Constraint for Constant Speed Maneuver
Due to the maximum load factor constraint, for the constant speed maneuver, it needs to check the velocity correspond to the minimum radius of the maneuvering path, i.e.,
(see Equation (4)) as follows:
where
vmax_ and
are maximum velocity corresponds to the maneuvering path and minimum radius of the maneuvering path, respectively.
For the constant speed maneuvering, there is a new range of the feasible constant speed from the minimum speed to the new maximum allowable speed,
vmax_, as follows:
In the case that vmax_ > vmax, Equation (20) is applicable.


 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}