1. Introduction
Visual inspections are usually required for ensuring the airworthiness of an aircraft in the maintenance routine [
1]. The traditional method of visual inspection is time-consuming and error-prone, as it requires human inspectors to visually inspect the entire aircraft exterior body to identify possible anomalies such as dents, cracks, leaking, broken or missing parts, etc., and manually measure the parameters of the found defects. Robotics-based inspection methods are being developed for aircraft inspection for reducing the workload, time, and cost of defect detection. These methods use unmanned ground vehicles (UGVs) [
2] or unmanned aerial vehicles (UAVs) [
3,
4] equipped with laser scanners or cameras to perform nondestructive inspection around the aircraft. The inspection vehicles either follow human operators’ guides or automatically navigate themselves based on an existing map of the environment to acquire images or other sensed data of the aircraft. These images or data can be used for defect identification and analysis, leveraging the power of machine learning techniques. Furthermore, automating the robotic inspection procedure without human intervention can significantly improve the efficiency of aircraft visual inspection. Many studies on this automatic robotic inspection employed UAVs to inspect large structures [
5,
6], specifically an aircraft [
7]. One key to the automatic robotic inspection is to solve the coverage path planning (CPP) problem to compute an optimal inspection path for the robotic inspection system, which requires a pre-existing CAD model of the target structure [
8]. All these studies assumed that a 3D mesh model of the target object is available and can be used for solving the CPP problem. Unfortunately, for aircraft inspection, such a 3D model may not be accessible to small and medium maintenance, repair, and overhaul (MRO) shops due to reasons such as the original 3D models of old aircraft may be missing, the original design may not match the current aircraft whose exterior may have been changed due to aging or alternation, or, in the most likely case, the original CAD model of the aircraft is inaccessible to the maintenance crew due to policy, process, or software constraints. Therefore, instead of creating a 3D CAD model of the aircraft from scratch, which is time-consuming, and requires professional designers, 3D scanners such as laser scanners and red–green–blue and depth (RGB-D) cameras can be used to generate a digital model of the target aircraft because of their efficient manner of 3D model reconstruction [
9,
10]. However, manually scanning a large aircraft using 3D scanner shares the same drawbacks as visually inspecting the aircraft. Similar to using UAVs for inspection, automating the aircraft scanning using UAVs equipped with 3D scanners can significantly improve the efficiency and quality because UAVs have been successfully applied in many other applications in surveying, mapping, and surveillance [
11], as well as in wireless networks [
12], due to their inherent attributes such as mobility, flexibility, and adaptive altitude. In addition, it is possible for small MROs to effectively use UAV technology and apply the “smart MRO” principle in the pre-flight inspection of aircraft [
13].
Aiming to automate the aircraft scanning and inspection when a 3D model of the aircraft is unavailable, we developed a two-stage approach of aircraft scanning using a UAV equipped with an RGB-D camera in this paper, based on our previous research [
14]. The goal of our approach is to generate a dense and precise 3D digital model of the target aircraft in a form of point cloud which could be used to compute an inspection path for guiding the robotic inspection procedure, and the UAV needs to finish the scanning or inspection process in a time-efficient manner, considering its constraint of short battery life. To ensure the precision of the generated point cloud model, we employed an indoor GPS system due to its advantages of large measurement range, non-contact, and easy setup [
15]. In addition, the indoor GPS system can achieve millimeter-level accuracy when tracking a slowly moving object, which makes it suitable for both stages of scanning [
16]. Therefore, in a static MRO environment with an indoor GPS system, the UAV–camera system follows a predefined path to quickly reconstruct a coarse model of the aircraft in the first stage. However, the low-resolution and low-accuracy model is not qualified for guiding the UAV–camera system to perform a safe and detailed inspection task. The UAV–camera system needs to closely scan the aircraft for the purpose of reconstructing a dense and precise digital model in the second stage. The resulting model then can be used for aircraft inspection, maintenance, or even as a key component of a digital twins to support the operational prediction and prognosis of the aircraft [
17]. In order to automate the scanning in the second stage, an ”optimal” scanning path for fully covering the area of interest of the target aircraft with short flying distance must be computed. We solved this CPP problem using a Monte Carlo tree search (MCTS) algorithm, which can be seen as a reinforcement learning (RL) technique, and it was applied in the difficult problem of computer Go [
18]. We also implemented a population-based heuristic optimization algorithm named max–min ant system (MMAS) [
19] to demonstrate the effectiveness of our two-stage approach of aircraft scanning.
The rest of this paper is structured as follows.
Section 2 introduces the existing methods for aircraft scanning and inspection, including the solutions of the CPP problem.
Section 3 describes the proposed two-stage approach of aircraft scanning.
Section 4 provides a simulation of solving the CPP problem in simplified scenarios with both the MMAS and the MCTS algorithms.
Section 5 presents digital experiments with an example aircraft. Finally, a conclusion is drawn and future works are discussed to end our paper.
2. Related Work
Path planning has been one of the most important research problems in the UAV field, aiming at finding an optimal path from an initial location to a destination location. Different studies have been conducted, for example, with a focus on constraint optimization [
20], computational intelligence [
21], and multi-UAV cooperative path planning [
22]. A general review of UAV path planning techniques and challenges was discussed in [
23]. For specific application of aircraft scanning and inspection, UAVs equipped with cameras were employed for collecting image data that can be used to create detailed 3D models of an Airbus fleet [
24]. Such solutions were also adopted in small MRO companies to develop procedures for providing inspection solution for airports operations. In fact, as an aircraft is large and its shape is complex, the path planning problem, as a key task of automated robotic scanning and inspection using the UAV–camera system, remains challenging. This problem is referred to as the CPP problem, a non-deterministic polynomial time-hard problem, which is for computing an ”optimal” path in terms of flying distance, flying time, or energy consumption of the UAV to fully cover the exterior area of interest of the target aircraft. Considering that aircraft scanning and inspection in MRO shops is usually in a static environment, the CPP problem can be solved offline based on an existing digital model of the aircraft. Many studies [
25,
26,
27] tackled the CPP problem in two steps by solving a set covering problem (SCP), following solving a traveling salesman problem (TSP). The SCP algorithms find the smallest set of viewpoints for covering the entire area of scanning, and typical SCP algorithms are the greedy algorithm and its variants. The TSP algorithms find the shortest path for visiting all viewpoints selected by the SCP algorithms, and popular algorithms are population-based optimization algorithms such as genetic algorithm, ant colony optimization (ACO), and particle swarm optimization. Instead of dividing the CPP problem into two sub-problems, other researchers studied one integrated solution for achieving multiple objectives, which are maximizing coverage and accuracy, while minimizing flying distance, time, or energy consumption. Phung et al. [
28] formulated the inspection path planning problem as an extended TSP in which both the coverage and obstacle avoidance were taken into account. They proposed an enhanced discrete particle swarm optimization algorithm to solve the extended TSP for robotic inspection of large surfaces. Almandhoun et al. [
7] developed the adaptive search space coverage path planner algorithm for aircraft inspection using a graph search algorithm instead of TSP algorithms. They produced a discretized sample space which consists of a set of viewpoints, and the sample space was used to generate the search space by graphically connecting samples with their neighbors. The algorithm also included a heuristic function that evaluates the expected information gain of the waypoints by updating a probabilistic volumetric map represented as an octree. This approach was extended by Silberberg et al. in [
29] for developing a visual inspection system of military aircraft using a multi-rotor UAV, and their analysis showed that multi-rotor UAVs are a viable inspection platform for military aircraft. More generally, the CPP problem of inspection by UAVs could be solved using grid-based methods, which guarantee a complete coverage of the target scenario by applying cellular decomposition in the area of interest and splitting the target-free space into cells in order to simplify the coverage [
30]. The grid-based maps were also leveraged in Kyaw et al.’s solution for optimizing the CPP problem in large complex environments based on the TSP and deep RL [
31]. They decomposed the environment to form a TSP problem and determined the solution to the TSP by training a recurrent neural network with long short-term memory layers using RL.
The above studies for large structure inspection with a UAV–camera system require a pre-existing mesh model of the inspected structure for solving the CPP problem. However, for most MRO shops, such a model is often unavailable, or very difficult to obtain. This makes our approach of aircraft scanning and inspection unique because it does not need an existing mesh model, and hence is beneficial to those businesses. Our method is still applicable if an existing aircraft model is available. In this case, one can omit the first stage and directly proceed to the second stage of the method. Our contributions include that (1) we proposed a method for scanning large aircraft using a UAV and an RGB-D camera without need of a pre-existing model; (2) we solved the surface coverage path planning problem using a Monte Carlo tree search algorithm based on a coarse model of the aircraft; (3) we demonstrated that our two-stage method can scan or inspect the large aircraft much more efficiently than manual scanning.
4. Simulation and Results
To better visualize the performance of our solutions to the CPP problem and demonstrate their effectiveness, a 2D-grid-map-based simulation was carried out without loss of generality, because a 2D grid map is a special case of a 3D grid surface. In addition, we tuned the hyperparameters through the 2D simulation.
The map is a square meter surface area discretized into 900 squared grids of one square meter each. The UAV–camera system works at a distance of m above the surface and the camera’s FOV is (, ). There are 900 candidate viewpoints uniformly distributed on the map with one viewpoint above each grid.
Starting from a specific viewpoint, the SCP algorithm found 26 viewpoints among the total 900 candidate viewpoints for covering all the grids of the map (
coverage), and the MMAS computed an approximate scanning path with a total length of
m with recommended hyperparameters
,
, and
. The path is shown in
Figure 4a.
The MCTS algorithm found 25 viewpoints for the complete coverage without any overlap among the viewsheds, which means that each grid is only visible to one viewpoint. However, the total length of the scanning path computed by the MCTS algorithm is
m, which is about
longer than the one found using the combination of the SCP and the MMAS algorithms, as shown in
Figure 4b. In the figures, the starting viewpoint is marked with a blue hexagon, the terminated viewpoint is marked with a big blue point, and the path connects all the viewpoints (small blue point) with straight lines. The overlapped grids are colored in red.
From the results, we can find that the MCTS algorithm tends to find a path with less overlap among the viewsheds, as we considered no-overlap in finding the neighborhood viewpoints. Because the overlap calculation is an approximate estimation based on a grid map, it may lead to small gaps between two viewsheds when applying the no-overlap scanning path in the second-stage scanning due to other factors, such as positioning errors. Such an issue of small gaps can be easily addressed using a slightly smaller FOV in computing the scanning path; therefore, the second-stage scanning will fully cover the interested area as the camera has a larger FOV and the resulting model will have small overlaps among viewsheds.
The impact of the hyperparameter
to the effectiveness of the MCTS algorithm was also evaluated, as shown in
Figure 5. The MCTS algorithm finds a scanning path that completely covers the target area in 900 simulation iterations with
= 0.6, which is the fastest trial.
Similar to the other learning-based methods, the combination of the SCP and the MMAS algorithms cannot guarantee to provide an optimal scanning path, but it provides a full-coverage suboptimal path, although there are some overlaps among the viewsheds. They could be used in the scenario where the full coverage is a priority. Meanwhile, the MCTS algorithm can provide a full coverage scanning path with no overlaps among viewsheds in a problem with a small map requiring a smaller amount of viewpoints to cover. However, our tests showed that the MCTS algorithm cannot provide a full coverage scanning path in a limited computing time (even 100,000 simulation iterations) if the map is large and requires more number of viewpoints for fully covering it, as shown in
Figure 6b.
The map is
m in length and
m in width, containing 5400 grids, and the size of each grid is
square meter. To increase the complexity of the problem, only valid grids (colored in green) are counted in the camera’s viewshed, while the white grids are invalid for the viewpoint. The MCTS algorithm found the best scanning path consisting of 68 viewpoints with a total length of
m, which covers
of the valid grids. For the same map, the combination of the SCP and MMAS algorithms found the best scanning path consisting of 91 viewpoints with a total length of
m, as shown in
Figure 6a.
5. Digital Experiment
To verify the practicality of our two-stage approach of scan path planning, a digital experiment was performed in Gazebo. We used the hector-quadrotor (a ROS package) [
34] with an Intel Realsense D435 camera (whose characteristics are listed in
Appendix A) for scanning the upper part of a Boeing 757 aircraft, as shown in
Figure 7a,b. The camera can be tilted from
(looking downward) to
(looking upward). All parameters of the simulation models were taken from the real products, such as the size of the target aircraft and the quadrotor, the FOV and depth range of the camera, etc. We used the simulated pose of the quadrotor in Gazebo as the data from an indoor GPS system, which contains both position and orientation of the quadrotor. To demonstrate the effectiveness of our approach, the quadrotor is under a proportional–integral–derivative control considering a tolerance of 5 cm in position and a tolerance of 0.05 radians in yaw.
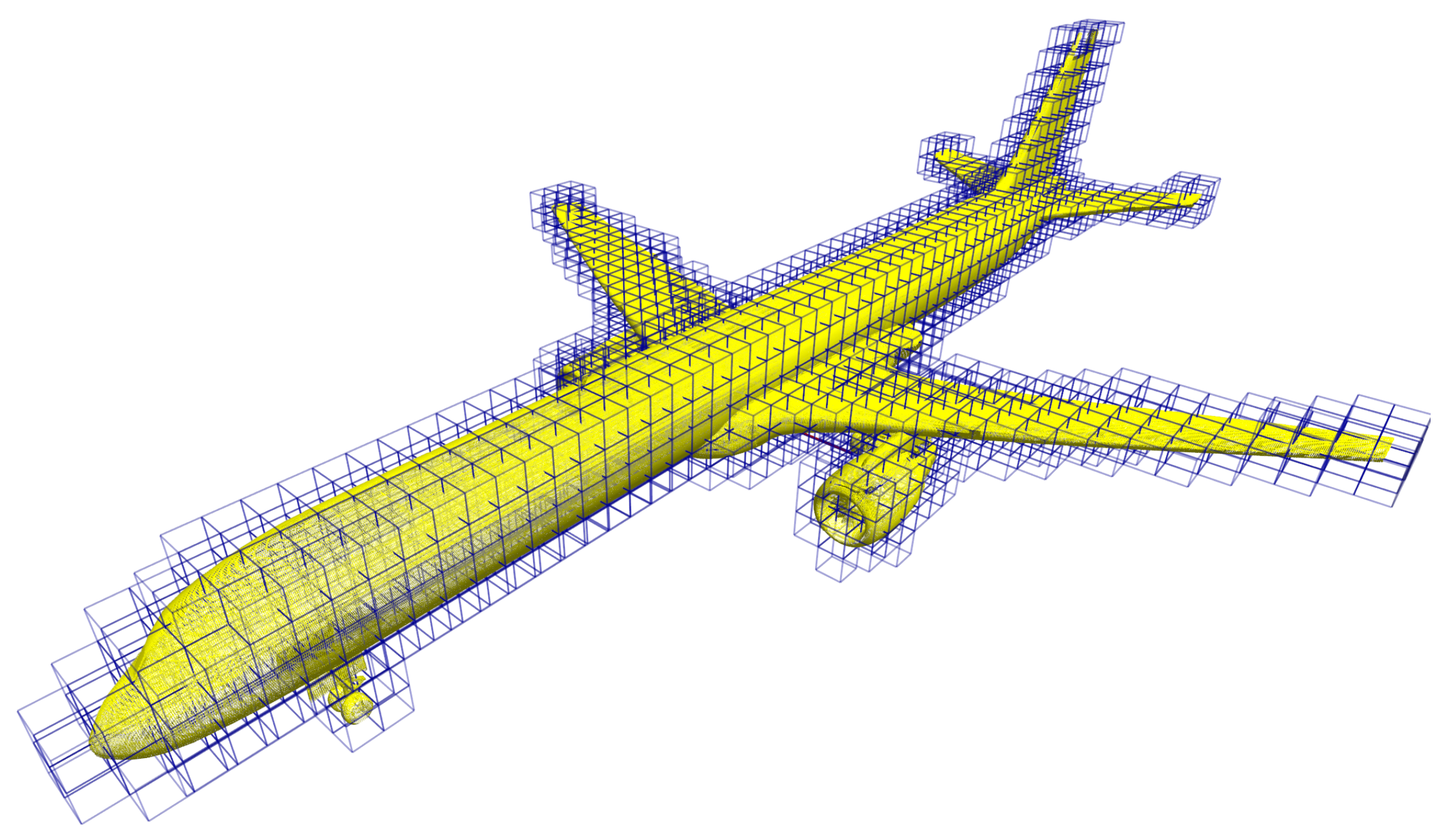
Taking the upper part of the fuselage as an example, based on the acquired coarse model of the aircraft in the first stage, 250 candidate viewpoints were generated with the working distance of
m from the aircraft surface and the voxel resolution of
m, as shown in
Figure 8.
The algorithms were tested on a desktop computer with an Intel i7-8700 CPU, an Nvidia GeForce GTX 1070 GPU, and 32 GB memory. The combination of the SCP algorithm and the MMAS algorithm found a full-coverage scanning path consisting of 109 viewpoint frames with total length of
m, as shown in
Table 1 and
Figure 9a. Meanwhile, by considering six neighborhood viewpoints in the search, the MCTS algorithm found a scanning path consisting of 55 viewpoint frames with hyper parameters specified in
Appendix B, and its total length is
m. The scanning path covers
of the target area, as shown in
Figure 9b. In terms of computational cost, the SCP and the MMAS algorithms took about 5 min to find the best path after around 550 iterations, while the MCTS algorithm took around 78 min for 1,000,000 iterations, which shows computational inefficiency, and this is a known issue of the MCTS algorithm with a large search space. However, the average frame coverage (the percentage of aircraft surface covered in one viewpoint frame) of the MCTS algorithm is 1.56%, which is better than the one of the SCP and MMAS algorithms (0.92%).
Increasing the number of neighborhood viewpoints will lead to more exploration in the MCTS algorithm, and thus require more computing resources. It is not a problem for an offline approach of planning the scanning path with a powerful computer; however, when the computing resource is limited or online path planning is required, reducing the number of neighborhood viewpoints is a simple way to reduce the learning cost and generate a scanning path more quickly, although the resulting path will be less optimal. In addition, increasing the terminated value will also result in more exploration in the MCTS algorithm, but the computed path will be more optimal. When the target area of interest is large and requires more viewpoints to cover, the solution found by MCTS tends to be less optimal; therefore, reducing the scope of search is a practical strategy in real-world aircraft scanning or inspection.
By following the planned scanning paths, the UAV–camera system can then perform close scanning to acquire a precise and dense digital model of the upper part of the fuselage, as shown in
Figure 10a,b. The generated model following the scanning path computed by the combination of the SCP and MMAS algorithms covers the entire area of the upper part of the fuselage after 15 min flying. While it took around 9 min to scan by following the path computed by MCTS algorithm, the resulting model contains few gaps. This could be improved by using a camera with a larger FOV during the second-stage scanning. Another strategy to improve the MCTS coverage is to divide the large target area of interest into several smaller subregions, and solve the CPP problem for each subregion, as the MCTS algorithm tends to perform better for searching an area which requires less viewpoints to cover. An additional benefit of this strategy is that we could leverage multiple cheap UAV–camera systems to simultaneously scan the subregions, which further improves the efficiency of aircraft scanning and UAV’s common issue of short endurance.
In order to scan the aircraft, we divided the aircraft surface into several subareas so that the algorithms can compute a scanning path with higher coverage for each subarea. As the aircraft is symmetric, we computed scanning path on the left half of the aircraft surface, and mirrored the path to the right half of the aircraft surface. For scanning the belly of the aircraft, the viewpoints were generated at a safe distance of 2.0 m to the aircraft surface to ensure a feasible flying path for the UAV. By connecting all the path of subareas, the scanning path computed by the SCP and MMAS combined algorithm consists of 509 viewpoints with total length of 837 m, as shown in
Table 2 and
Figure 11. It covers 75% of the aircraft surface and requires around 59 min to complete the second-stage scanning. Meanwhile, the MCTS algorithm generated a path 689 m long which consists of 479 viewpoints and covers 68% of the aircraft, and the UAV needs to spend 53 min to complete the scanning. The second-stage scanning covers most of the surface of the aircraft body (excluding the landing gears and engines). The resulting dense models are shown in
Figure 12.
During the digital experiment, we found that it is difficult to generate feasible viewpoints for the belly of the aircraft due to its confined space. In addition, the sharp features of wing edges may not be fully covered because the resolution for generating viewpoints is 1 m, which is relatively low for the sharp edges. In the future, we need to use a higher resolution to generate the viewpoints for the complex features around the aircraft wings and belly, which requires a close scanning on these areas in the first stage to generate more points for computing more accurate surface normal. Overall, the SCP and MMAS combined algorithm outperforms the MCTS algorithm in finding a scanning path for full coverage; however, the MCTS algorithm tends to find a path with less viewpoints, and thus requires shorter flying distance. Both methods can guide the UAV–camera system to scan the large aircraft within just one hour.
It is worthy of mentioning that in a physical experiment or application, the UAV–camera system operation may encounter potential issues such as malfunction, data lost due to bad communication network, large error in positioning due to imperfect configuration of the indoor GPS system, or dynamic obstacles such as a human entering the UAV’s workspace. All of these issues have not been covered in our study, but they must be addressed before a real flight test or practical use of the technology can be attempted.
6. Conclusions and Future Work
We developed a two-stage approach of a UAV-based 3D scanning system for exterior inspection or digitization of an aircraft. Such a created digital model can be used for detailed offline inspection, another downstream process in aircraft maintenance, such as visualization and defect analysis, or just for data capture for future reference. The UAV is equipped with a consumer-grade RGB-D camera and works with an indoor GPS system. The technology can significantly reduce human workload, eliminate human error, and improve work efficiency in scanning or inspecting an aircraft. It solved a CPP problem using an MCTS algorithm and an MMAS algorithm. Both algorithms can effectively find an approximate optimal path in terms of flying distance for automated full coverage scanning. This two-stage approach has been verified by dynamic simulation for scanning the upper part of an aircraft fuselage and the entire aircraft to quickly generate a dense digital model. Practical level of sensor errors and noise have been considered in the simulation tests. From the study, we found that the MCTS algorithm performs better in small search space than a large search space and, therefore, it is better to divide a large area of interest into several smaller areas before applying the MCTS algorithm. Such a divide-and-conquer strategy also possibly benefits using multiple UAVs to scan an aircraft simultaneously, which will be our future research. We also found that it is difficult to scan some belly areas of an aircraft using a UAV because the confined space poses a safety challenge to the flying UAV. Future research is needed to address this challenge.
The scanning work can be easily extended to aircraft online inspection, which requires a full coverage based on either a discrete or continuous path. Another future topic is to use a team of UAVs to perform scanning or inspection work, so that they can complement each other for team synergy and strength. The team can also be a combination of UAVs and UGVs because the UGVs tend to be more suitable than UAVs for scanning or inspecting the belly areas of an aircraft.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











