2. Operations in Forest Environments
Forest environments are inherently difficult operating areas for unmanned aircraft. One of the major issues is the size of forests, with plantation areas ranging from a small 1 ha woodlot to a large plantation, such as Kaingaroa Forest, the largest pine plantation in the Southern Hemisphere, which covers approximately 180,000 ha [
1]. Natural forests can be an order of magnitude larger, again, with the world’s largest forest, the Boreal Forest, covering 1.2 billion ha, or approximately 9% of the land area of Earth [
2]. Plantation forests are typically broken up into smaller stands of 10 to 100 ha for management purposes, making them somewhat more accessible to UAVs, so this would be representative of the size of a typical UAV operation for forestry. UAV operations in forested areas, however, are not confined to smaller areas, with some studies using UAVs for wall-to-wall captures over larger areas of 200–340 ha [
3,
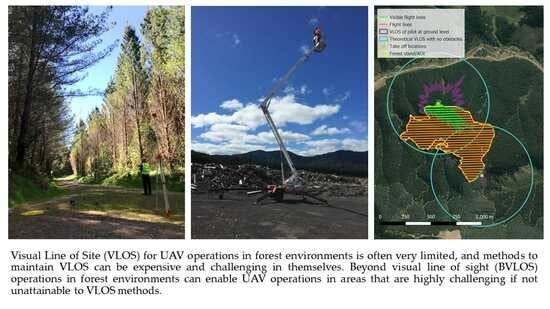
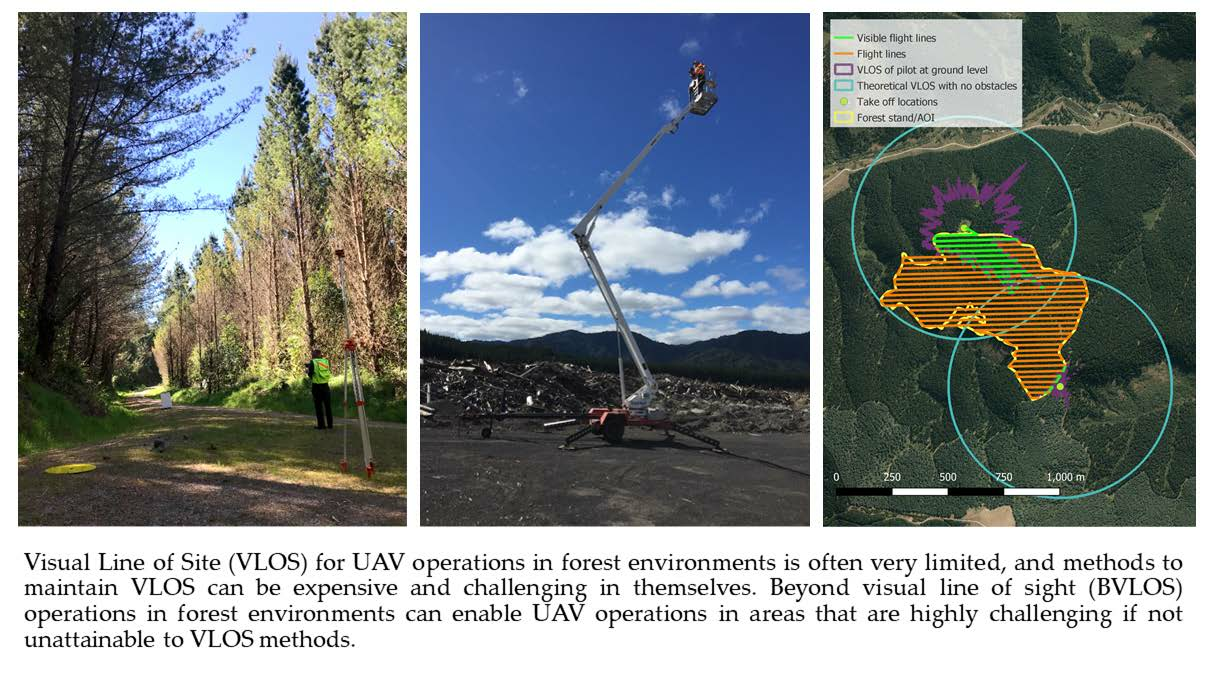
4]. The trees themselves also present an obstruction to line of sight (VLOS) and require frequent movements of pilots or the use of expensive equipment, such as mobile elevating work platforms (MEWP), in order to maintain VLOS [
5]. The ability to fly BVLOS, in such instances, would make operations far easier for the operator. However, there are some significant regulatory and operational barriers that would need to be overcome for such operations to begin. There are also clear applications of unmanned aircraft within forest environments, such as wildfire monitoring and suppression, carrying out inventory and health assessments of forestry plantations, conducting wildlife research, flora and fauna conservation efforts, dropping seed capsules to help with reforestation, spraying of herbicides to kill invasive plant species, and dropping poisons and traps for pest control, among others [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16]. One of the common characteristics to all of these applications is that the ability to cover large areas is desirable. However, if conducting VLOS operations, the operating area is limited by human vision. There are different estimates of what distance a human could visually detect unmanned aircraft from given variations in meteorological visibility, the size of unmanned aircraft, and the location of the person detecting the aircraft (e.g., on the ground vs. on board another aircraft) [
17,
18,
19]. Operational experience from the authors suggests that between 500 m and 2 km VLOS would be usual for most craft sizes in visual meteorological conditions. However, due to the variations that might be expected based upon aircraft size, colour, use of lighting, and meteorological conditions, we do not argue a precise value and, rather, present
Table 1 to show how VLOS operations can significantly reduce the size of operating areas.
While
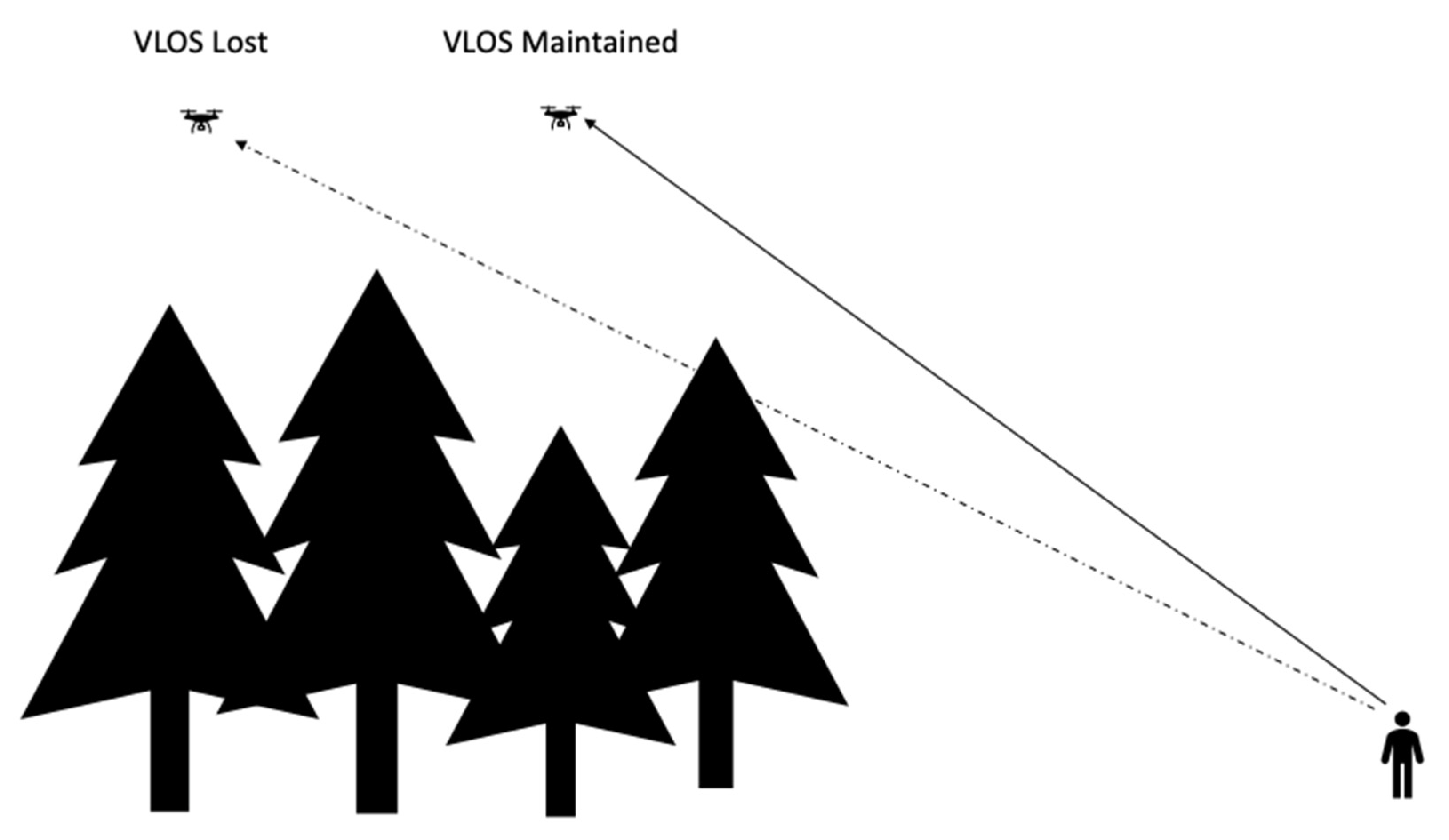
Table 1 shows the effect of VLOS on possible operating areas, one further consideration to take into account is that all forest areas have a common visual obstruction: the presence of trees.
Figure 1 visually depicts how moving a very small distance over tree cover can result in complete loss of VLOS when flying a craft in a simple scenario over flat terrain.
Due to the difficulties associated with maintaining VLOS, operations often take place from clearings, high vantage points, or the pilot may use a MEWP. If none of these are available, the pilot may need to frequently relocate themselves to maintain VLOS or employ visual observers to conduct what is called an Extended Visual Line of Sight (EVLOS) operation, where the pilot loses VLOS, but a visual observer maintains VLOS and is in direct communication with the pilot [
20]. Aside from affecting the ability of the pilot to maintain VLOS of the aircraft, trees can also limit the pilot’s ability to scan the surrounding airspace and mitigate the potential of an airborne collision. Although many UAV users, in commercial forestry, operate at or below 400 ft, due to regulatory considerations, numerous operations in forest environments also take place at higher altitudes because of the operational efficiencies associated with higher altitudes (including a greater field of view for sensors and associated increase in flight line spacing), in addition to the enhanced VLOS that this creates for the pilot above the forest canopy. The anecdotal experience of the authors suggests operations between the altitudes of 400 and 1500 ft above ground level (AGL) are relatively common over forest environments. However, to operate above 400 ft, in most jurisdictions, requires regulatory approvals, such as licensing or certification. For this reason, it is critical that operators check aeronautical information as part of mitigating airborne risk and maintaining situational awareness [
21]. Listening to air band radio, after receiving appropriate training to understand standard aviation phraseologies, is also strongly advised to enhance situational awareness.
While EVLOS methods can be employed to overcome the visual occlusion caused by forests, the dense foliage can also cause signal attenuation for radio waves. This has a strong limiting effect on the range of the command and control link (C2) between the craft and the operator [
22,
23].
Another associated issue with operation in forest environments is that they are often remote and occupy land that would be otherwise unsuitable for high value crops. For this reason, operators often have to contend with steep and hilly terrain, which have a similar potential for obstructing VLOS as trees do, combined with the trees themselves. The remoteness can also present issues with accessing operating areas, due to the absence of roads, open spaces to set up ground operations, and other infrastructure, particularly in natural forests where harvesting is not permitted.
3. BVLOS Operations
BVLOS operations are attractive within forested environments because they remove the need for any pilot or visual observer to maintain VLOS with the aircraft and the surrounding airspace. Technically speaking, even basic prosumer-grade unmanned aircraft are capable of BVLOS flight. However, they lack the technical capabilities to mitigate ground-based and airborne risks to the extent necessary to do this in a compliant manner with aviation regulations. The regulatory environment and how to take a risk-based approach to allow for safe BVLOS operations are outlined in the following sections. However, this section elaborates, to a greater detail, how BVLOS operations can look in forested areas and how this overcomes many of the challenges within this operating environment. Real examples are given based upon operations that have been carried out or discussed by the authors within New Zealand and Pacific Island Nations.
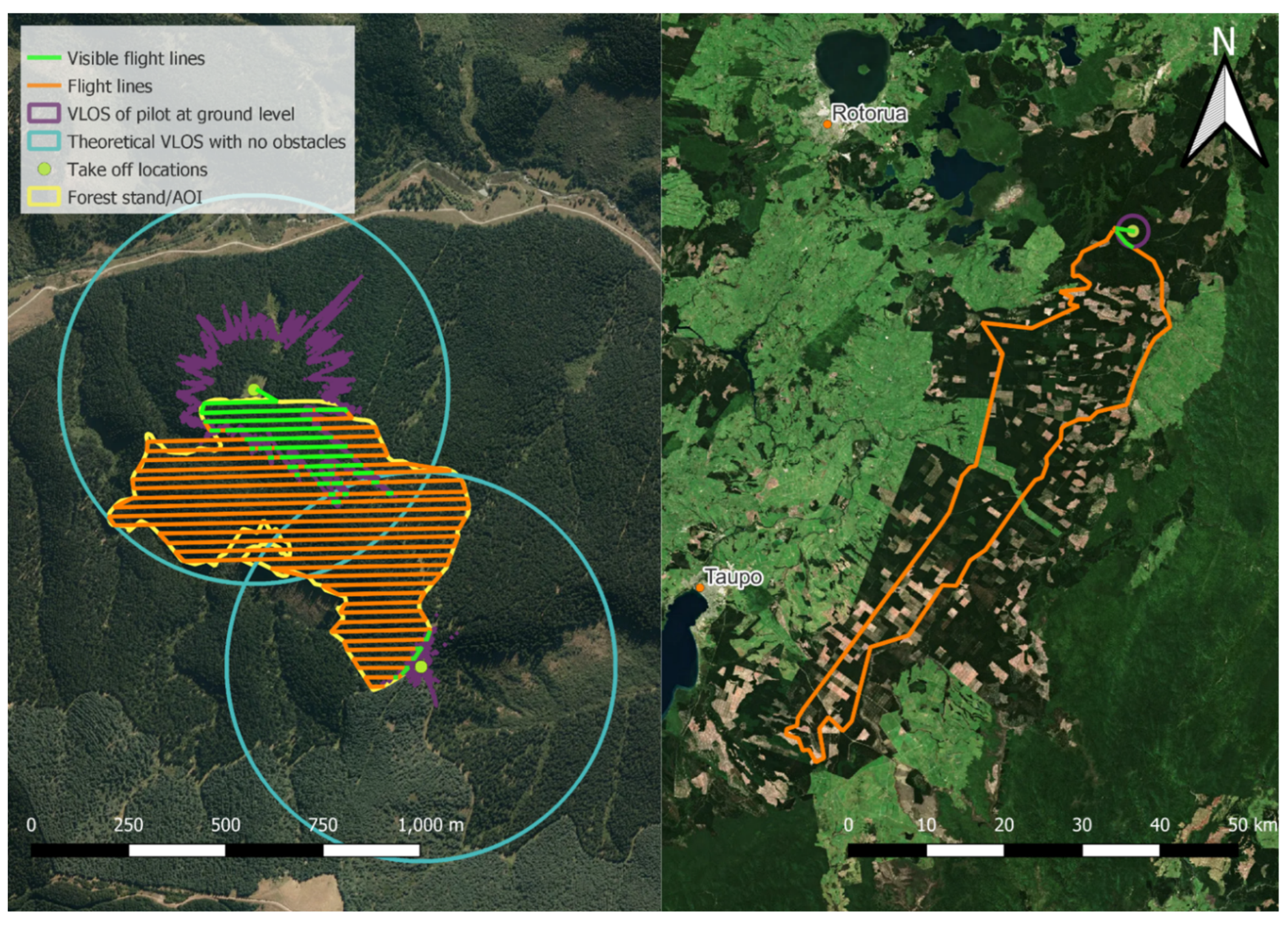
One of the first aspects to highlight about BVLOS is that there is variation with regard to the distance between the pilot and the unmanned aircraft. This influences the degree of usefulness of BVLOS for some operations, as well as the degree to which key technical and operational mitigations must be applied to be able to do those operations safely. While not recognised formally in the literature, the authors have observed a distinction between “Soft BVLOS” and “Hard BVLOS” within practitioner circles, and the terms are useful for understanding different risk profiles for BVLOS operations based upon how far the aircraft travels beyond VLOS. Soft BVLOS can be thought of as BVLOS operations that are carried out within a range that would be considered for VLOS operations, but the view of the aircraft and surrounding airspace is occluded by objects and terrain such that VLOS is not achieved. Hard BVLOS are operations that are carried out over long distances, which require significant equipment enhancement to be achieved safely. These two different situations are represented, in
Figure 2, with an example of an operation that takes place within a 500 m radius of the operator standing on two skid sites (timber landings) at either end of an area of interest and an operation carrying out a roading survey across a large forest estate that spans between two cities within New Zealand.
To expand upon the concept of Soft BVLOS vs. Hard BVLOS, two scenarios are provided that are typical scenarios that might be faced within the forestry sector. The example Soft BVLOS scenario is an unmanned aircraft flight covering a mature stand of trees on flat terrain, surrounded by stands of equal age that will be assessed, with only forest roads and a small skid site to take-off from. The Hard BVLOS scenario is a flight over a large forest estate that will be assessed, with mixed age classes and species, ranging from flat to hilly terrain, and the far end of the forest is 60 km from the take-off location. Both scenarios would be taking place in uncontrolled (Class G) airspace. A summary of these two scenarios can be found in
Table 2.
3.1. Scenario 1: Soft BVLOS
Scenario 1 represents a situation that most foresters will face regularly when utilising unmanned aircraft for monitoring and management purposes. In this example, a forester is wanting to fly over a 20 ha rectangular stand of mature
Pinus radiata in the 40 m tall height range. The only take-off location is a small skid site on the side of a forest road at one side of the stand that has been kept open, and the skid site is surrounded on all sides by 40 m tall trees. The stand is surrounded, on all sides, by the same age class, and there are also no nearby high points from which to fly from, as the terrain is flat; therefore, the skid is the best take-off point. There is very limited VLOS to the craft and the surrounding airspace from any of the open spaces surrounding the stand, making VLOS operations impossible from this location. EVLOS is not an option here due to the height of the trees, and the height of the neighbouring trees, restricting visibility over the entire stand. It might be possible to bring in a MEWP to raise the height that the pilot is flying from above the height of the trees. However, this would be expensive—due to the height of the trees—and may not be possible given the lack of developed roads. It is also possible to climb trees, but that would require certified climbers who are also experienced unmanned aircraft pilots: labour that will not be cost-efficient due to the highly specialised nature of the work. The use of either a MEWP or climbers would add costs to the point where it might even be cheaper to use a small manned aircraft for the same operation.
Figure 3 illustrates the operating area that is described in scenario 1.
3.2. Scenario 2: Hard BVLOS
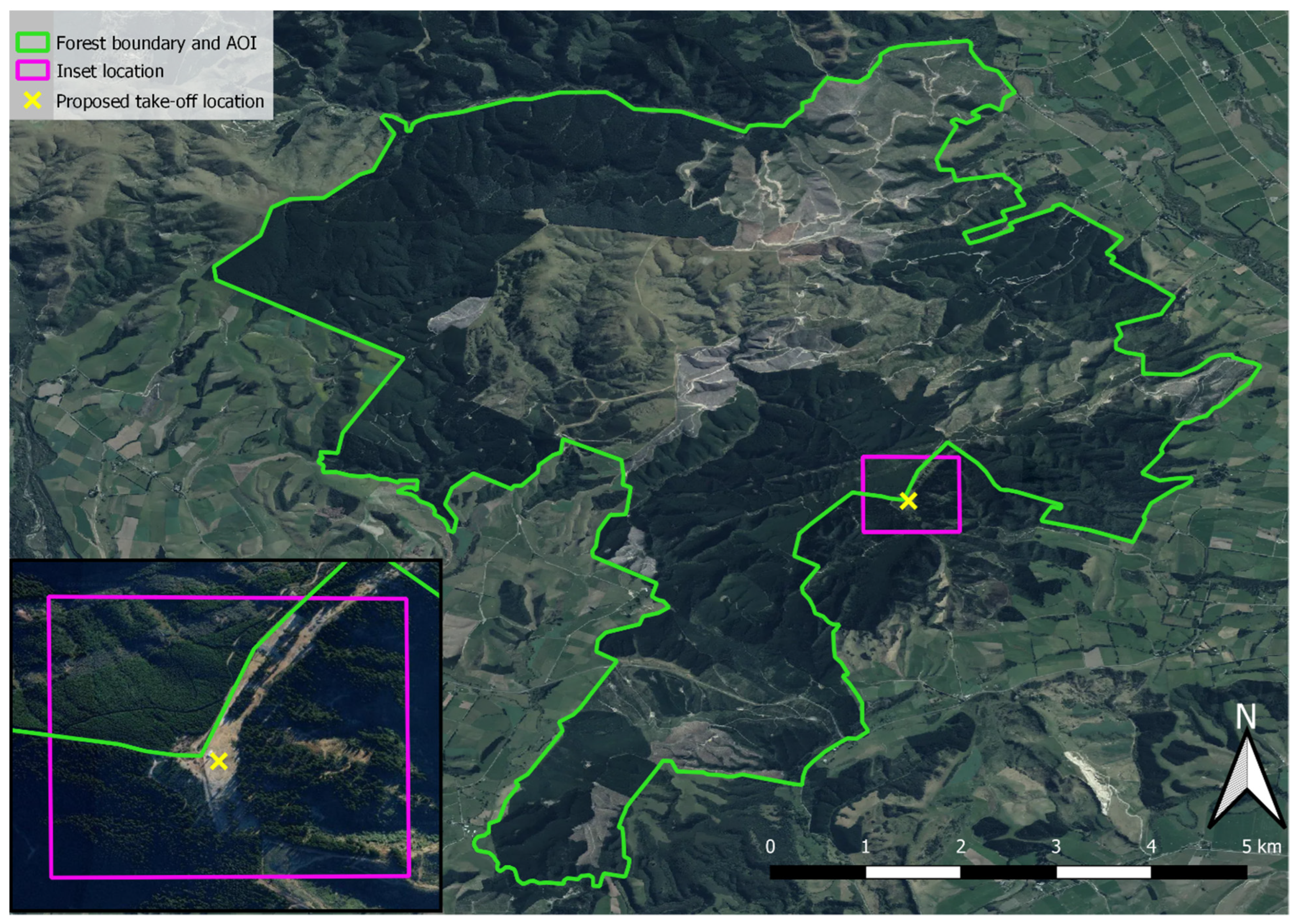
Scenario 2 represents another realistic scenario, within the forestry sector, whereby data capture is requested over an entire forest estate: in this case, one that is just under 6000 ha and comprised of steep terrain and mixed age classes of trees. There are some points from where the operation could take place, enabling a clear line of sight for the C2 link; however, the distance from the vantage point to the edge of the forest is 8 km, which means that the operation could not be done within VLOS. The operating area for scenario 2 is shown in
Figure 4.
In Scenario 2, VLOS is not possible with or without a MEWP because the distances involved are too far. However, it is possible to perform EVLOS by positioning visual observers on ridges around the estate. The difficulty with this is that there needs to be overlap amongst visual observers so that VLOS is never lost, and there also needs to be clear training around visual scanning, handover procedures, and standard phraseologies for communications. An additional consideration in forest environments is that it may be difficult to access the required vantage points, and a lot of time might be used up positioning visual observers. Those visual observers would also be paid for their work and may need travel expenses and accommodation paid for, especially if operating in a remote area. For these reasons, BVLOS is the more efficient and pragmatic option. Regardless of whether it is an EVLOS or a BVLOS operation, there will be common issues related to whether the C2 link is capable of securely covering the entire operating area and whether the aircraft has a large enough power supply to avoid regularly returning to the take-off point. In this sense, the most likely platform will be a fixed-wing vertical take-off and landing (VTOL) aircraft, as these have longer flight times due to superior aerodynamics and subsequent efficiency in power consumption [
24]. For BVLOS, there will also need to be sufficient payload to carry the combination of remote sensing equipment and the necessary systems to detect and avoid other aircraft.
4. The International Regulatory Environment
One of the biggest issues when planning a BVLOS operation is that the applicable rules and regulations vary markedly between countries [
20]. To this effect, the ability to conduct BVLOS operations and under what conditions are not standardised. This issue is briefly explored in this section, with some of the commonalities highlighted. The next section deals with taking a risk-based approach, which may not match a particular set of rules, but it instead highlights how risks can be managed.
For manned aviation, it is somewhat more straightforward as to how regulations are typically created. The International Civil Aviation Organisation (ICAO) would typically create Standards and Recommended Practices (SARPs), which would then be used by signatory states to create rules that are fit for purpose for their country, registering any differences against the SARPs [
25]. However, these have not yet been produced for remotely piloted aircraft systems or autonomous unmanned aircraft systems. While there may not be SARPs, there are model regulations that are available for states to use and adapt for their own countries [
26]. These model regulations have relatively few discrepancies between high-level regulatory considerations that are used in major jurisdictions [
27]. Under the model regulations, BVLOS operations would need to be conducted by an organisation that has achieved certification under Part 102 of the Civil Aviation Rules (CARs). The model CAR Part 102 provides a process whereby an organisation would submit an operating manual—commonly called an exposition—to take a risk-based approach to achieving variations to CAR Part 101, which is a set of general operating rules and is more constrained in what operations can be done [
28]. In the accompanying Advisory Circular (AC), AC102-1, which details acceptable means of compliance with CAR Part 102, ICAO states that the “risks associated with BVLOS will require a strong safety case in your application” (p. 11) [
29]. Examples contained within the AC include explaining how airspace requirements will be met, the ability to provide separation from other aircraft, and the means of mitigating risks to persons, property, and terrain [
29]. While these requirements are common across most countries, the means of determining how airspace requirements are met, how separation is achieved, and how risks are managed are where discrepancies between countries tend to occur.
For the first two aspects—complying with airspace requirements and maintaining separation from other aircraft—there may be several ways of achieving these requirements for a BVLOS operation. While the airspace classes and types of special use airspace that are used by each country do vary, the underlying requirements for those that are used are similar and sometimes identical. Typically, forest environments are not collocated with large cities or busy airports. For that reason, BVLOS forestry operations usually happen in Class G airspace, which is uncontrolled airspace. Regulators emphasise that operation within Class G airspace is dependent upon the ‘see, detect, and avoid’ principle, as per the Visual Flight Rules (VFRs) [
30,
31]. For this reason, there are associated rules regarding visibility, height above terrain, and distance from clouds such that pilots can visually detect other aircraft, as well as the requirement to keep a listening watch on the radio for position reports of other aircraft [
30,
31]. In this sense, unmanned aircraft operators are expected to maintain VLOS with their aircraft and surrounding airspace or to use EVLOS and achieve the same standard with the assistance of visual observers. They should also listen to the local air band radio frequency to assist with situational awareness when operating outside of shielded areas: areas that are shielded by obstacles such that no manned aircraft could reasonably enter them [
21]. To achieve BVLOS operations that are compliant with the requirements of Class G airspace, the unmanned aircraft will need to have the technological capability of fulfilling the ‘see, detect, and avoid’ principle, which is commonly referred to as Detect And Avoid (DAA) systems. The next section outlines some of the technologies that might be used to make this case. However, operations may also take place in controlled airspace. If this is the case, then, the operator will need to obtain permission from Air Traffic Control (ATC) and comply with any requirements [
32]. In many respects, controlled airspace is easier to operate BVLOS within because ATC can ensure separation between the unmanned aircraft and manned aircraft that might be operating in the area. However, this does not mitigate the need for some onboard technologies to enable visibility of the aircraft for Secondary Surveillance Radar (SSR) so that ATC can see the location, speed, and heading of the aircraft [
33]. Nonetheless, very few forested areas will be within controlled airspace, so this is an unlikely operating environment. Finally, BVLOS operations can take place within restricted airspace or other forms of segregated airspace [
34]. These require the administering authority’s permission to be able to enter them. With enough forward planning, it may be possible for the owner of a forestry estate to apply to have a restricted airspace above their estate so that they become the administering authority. This restricted airspace may be either temporary or permanent in nature. While, again, countries may have differences in how easy it is to apply for restricted airspace, the decision typically hinges upon whether the restricted airspace would pose a significant interruption to manned aircraft operations in the area [
20]. Accordingly, the ability to get the restricted airspace is a lot easier in remote areas where there are no extant manned aviation operations. The advantage of restricted airspace is that the operator only needs to be able to ensure that ground risks are managed and that the aircraft will not leave the boundary (in terms of area and altitude) of the restricted airspace. This avoids the need for complex DAA systems because there is no potential for collision with manned aircraft, but it does not remove the need to mitigate other risks [
21]. Some countries, such as Australia, also treat remote airspace in a similar manner to restricted airspace and allow for BVLOS operations without DAA systems. However, there are very tight bounds around such approvals [
35].
Outside of airspace requirements and preventing collisions with manned aircraft, most countries will have requirements around how risks to people, property, and terrain are mitigated. Typically, these aspects are already somewhat managed by the operating environment. In the case of privately-owned forest estates, the owners can ensure that there are no workers present within the operational area, effectively reducing the potential to injure people to zero (excluding those involved with the operation). Even if they are public areas, the concentration of people within the area will likely be very low. Similarly, the damage that could be done to property is limited to damaging trees or terrain, as forest environments will not typically contain privately occupied dwellings. Nonetheless, there may be exceptions that require specific mitigations to reduce ground risks (people, property, and terrain). As highlighted in extant literature, these mitigations sometimes overlap with reducing airborne risk, while others are specific to only ground risks [
21,
36]. Many of these issues will be covered in
Section 5.3, which details other considerations such as training and maintenance, which are organisation-specific due to differences in the nature of operations and types of aircraft being operated. Parachute systems, combined with minimum safe altitudes, the wearing of personal protective equipment, and ensuring staff are trained on first aid and emergency responses, are effective ways of mitigating ground risks [
21] and are suitable for the forestry environment. One that is particularly relevant is considering how any fire risk might be managed, which is particularly important when using a petrol-powered unmanned aircraft. Typically, there will be fuel shut-off valves that activate upon a heavy impact to try and contain fuel, combined with the ability to quickly respond in the event of an emergency (anecdotal examples include having a manned aircraft operator on standby or a second unmanned aircraft that can be used to see if the wreckage has ignited in the event of an accident). Many forest owners also maintain their own firefighting infrastructure; therefore, close coordination of BVLOS operations, with the relevant firefighting resources notified of the operation and placed on standby, can further mitigate risks.
In terms of formalising the issues discussed in this section, one method that is being increasingly applied around the world is the Joint Authorities for Rulemaking on Unmanned Systems’ (JARUS) Specific Operations Risk Assessment (SORA) process [
37]. This involves classifying the airborne and ground risks, as well as applying mitigations to reduce those to an acceptable level. Its annexes provide details around how this process works. At the time of writing this article, there are 63 regulatory authorities from around the world that are part of the JARUS community [
38], meaning that this approach is arguably the most widely accepted internationally. Nonetheless, the way in which the approach is used does vary internationally, and countries will typically use the process as part of an application, rather than in lieu of one.
The International Regulatory Environment: Executive Summary
- -
There are currently no standards and recommended practices (SARPS) that are internationally applied.
- -
ICAO has released model regulations, which are analogous to regulations in many major jurisdictions.
- -
Operators either need to use special use airspace to be separated from manned aircraft or must fulfil the see, detect, and avoid principle, through detect and avoid (DAA) systems, to allow for BVLOS flight
5. Taking a Risk-Based Approach to BVLOS Operations in Forest Environments
While there are common considerations worldwide, in terms of following airspace requirements, ensuring separation from other aircraft, and minimising risk to people, property, and terrain, these points can be addressed in many different ways, and different countries may have preferred methods. The following sections describe some of the technologies, operational considerations, and other considerations that should be taken into account when formulating an organisation-specific approach to safely conducting a BVLOS operation. Some considerations will be more or less relevant depending on the exact nature of the operation.
5.1. Technological Considerations
This subsection deals with technologies that might be considered as part of making the case for a BVLOS operation. The idea is that, after consideration, an operator may decide which technologies are appropriate for taking a risk-based approach towards the operation while still achieving the desired operational results. These considerations are also not exhaustive but, rather, present some common technologies and how they might be used.
5.1.1. Primary Radar
Primary radar is a technology that was widely used within manned aviation to separate aircraft from one another, and it is still sometimes used today as a back-up to the SSR systems, which are dependent upon aircraft transponders, or as a ground radar while aircraft are on the ground [
39]. However, primary radar can also be used on board unmanned aircraft as a means of achieving the DAA requirements associated with flight in non-segregated airspace [
40]. Unlike SSR and the use of ADS-B In and Out, primary radar does not depend on aircraft having transponders on board in order for them to be detected, and it also detects objects other than aircraft, such as buildings and trees, that would otherwise not be picked up [
41]. This is important, as many countries allow the flight of aircraft with no radio on board (known as NORDO aircraft). These NORDO aircraft can only fly in uncontrolled airspace, but unlike other aircraft, they do not make radio calls with position reports, and they are also not listening to position reports of other aircraft. They are entirely dependent on visual detection for avoiding other aircraft. Equally, in many countries, ADS-B transponders are not required to be installed on aircraft for flight in uncontrolled airspace, so they would not be picked up on SSR. These aircraft would be picked up by primary radar, allowing for NORDO aircraft and aircraft without transponders to be picked up. Primary radar is also less effected by sunlight and adverse meteorological conditions, such as fog, dust, rain, snow, or smoke, all of which are a major hindrance to an optical system and which may also affect lidar [
41,
42]. However, primary radar is not without its drawbacks as a DAA tool; namely, because it has a lower level of locational accuracy (due to longer wavelengths), it is often too large and has too much required power output to be fitted on unmanned aircraft, so it poses challenges for signal processing, and it is very costly to purchase and maintain [
41,
42,
43]. However, it is also possible to use a more powerful primary radar as part of the ground control station instead of on the aircraft. This does not avoid the high costs of purchasing radar, however, but it may be a good alternative if the aircraft is not large enough to have onboard radar. If properly deployed, it has been shown to be able to detect cooperative and non-cooperative aircraft, but it is often still combined with other DAA technologies for maximum effect [
44,
45]. There are also considerations in terms of where this is positioned, given the topography of different forest environments, with the potential requirement to use visual observers outside of the radar’s coverage [
45].
5.1.2. ADS-B In and Out
ADS-B (Automatic Dependent Surveillance-Broadcast) is a DAA system that relies upon the unmanned aircraft having a transponder on board that broadcasts its position, registration (or identity if the unmanned aircraft is not registered), direction of travel, and speed over an encrypted data link [
46]. The ADS-B Out function is when the aircraft sends its own data, while ADS-B In will provide information about other ADS-B equipped aircraft [
47]. ADS-B In is commonly used on unmanned aircraft operations, as it is relatively low-cost and can be used with small, unmanned aircraft as an aid to situational awareness [
33]. ADS-B Out is more complicated, as the required power output and potential for interference with other onboard systems mean that only larger unmanned aircraft could have a conventional ADS-B Out system. However, there are lower power alternatives to the ones used on manned aircraft that can be applied to smaller unmanned aircraft, albeit with reduced broadcasting ranges [
48,
49,
50]. The suitability of ADS-B systems as a DAA tool depends upon the airspace where the aircraft will be used. If it will be used within controlled airspace, this would bring the unmanned aircraft up to similar standards applied to manned aircraft, and ATC will be able to ensure separation between the unmanned aircraft and any other aircraft within the operating area. Even in remote areas, having a lower powered system is an additional safety layer that, if a manned aircraft that has a transponder on board was approaching the unmanned aircraft, could trigger some form of alert or warning. However, if the other aircraft does not have the ADS-B transponder, it will not be picked up with this tool alone.
5.1.3. Lidar
Lidar (acronym for light detection and ranging) is a tool widely used within forestry for remote sensing and data collection, particularly for measuring tree height and collecting inventory data [
51,
52]. Lidar has a much shorter wavelength compared with primary radar, which means that its effective range is also shorter, though with better range and azimuth accuracy [
41]. However, for low-level flying, lidar is capable of identifying obstacle collision hazards (e.g., trees and vegetation, powerline cables and manmade structures, animals, etc.) and helping to maintain the unmanned aircraft at a certain separation above the ground [
41,
53]. Lidar’s limited effective range is approximately 50–100 m [
54], so it is not an effective DAA tool against other aircraft. Rather, its application as a DAA is usually in a complementary role by providing low-level detection of obstacles. Nonetheless, recent research has shown that unmanned aircraft can perform autonomous sub-canopy flights using only lidar technology to avoid obstacles along the flight path [
55,
56]. SLAM-based UAV DAA systems have the dual benefit of being able to capture a detailed three-dimensional model of the forest beneath the canopy, which can be used for stand analysis [
57]. SLAM algorithms also work by matching geometric features from their environment to aid in situational awareness and navigation, so a forest is arguably an ideal situation for their use, as tree stems provide a feature-rich environment [
58]. This shows great potential for future research as lidar is a relatively inexpensive DAA tool if used in this way. The flight is sub-canopy, which means that the airborne risk is zero because no manned aircraft can enter the operating area, offering potentially more accurate data for issues, such as sub-canopy snow depth or sub-canopy invasive species, than current methods that use unmanned aircraft to fly above the canopy [
59,
60]. Nonetheless, the corollary is that flight at lower altitudes means that less area can be covered than using overflight, so the viability of this BVLOS technique is highly dependent on the size of the forest environments and the quality of data that is required.
5.1.4. Electro-Optical and Computer Vision-Based Systems
With the development of machine learning and deep learning, it is now possible to have on-board DAA systems that utilise Electro-Optical (EO) sensors. EO systems work by sensing light waves and utilise software to analyse the incoming scenes and detect any incoming threats to the aircraft [
61]. While as recently as 2008, the ability of such systems was questionable because they could not detect small aircraft such as microlights [
62], significant progress has been made in recent years to improve their reliability [
63,
64,
65] as well as how they can be adopted as part of multi-sensor architectures [
66]. EO systems are typically low weight, small, and are often inexpensive [
61]. However, they do not perform as well in visibility limiting meteorological conditions or in poor lighting [
61]. They also suffer from a limited range, and often, they have a limited field of view, which mean that they are often not a complete solution for DAA [
67]. Anecdotally from projects that the authors have worked on, providing a 360-degree field of view can significantly impact upon weight and the power output required, so this may not currently be a viable solution. Additionally, processing power and resolution for images are also challenges with this technology [
43]. However, EO sensors provide a significant enhancement when used with other DAA tools, particularly when combined with primary radar [
66].
5.1.5. FLARM
FLARM, short for flight alarm, is a system used in general aviation that informs the pilot of any nearby aircraft (manned or unmanned) or parachutes that have FLARM on board and locates them relative to the FLARM-equipped aircraft’s built-in Global Navigation Satellite System (GNSS) receiver and altimeter [
68,
69,
70]. FLARM can be meaningfully compared with ADS-B to consider why it may be chosen in lieu of—or additional to ADS-B—as a means of DAA. FLARM only has a range of up to 5 nm (9.26 km). Therefore, it cannot detect high velocity aircraft with enough time to safely respond, does not integrate with traffic collision avoidance systems, only works in the region it is purchased, and does not provide suggestions to pilots as to how to resolve any collision [
68]. Despite these disadvantages, it also has some advantages compared with ADS-B; namely, it is cheaper, quicker, uses less energy, and can operate independently from ATC [
68]. As noted earlier, forest environments are typically in remote areas, away from controlled airspace or significant aviation activity. The ability of FLARM to operate independently of ATC is, thus, a major advantage, and the disadvantages of range and inability to detect high velocity aircraft are unlikely to pose any major hindrance to the typically low altitude operations that take place in forestry. Thus, FLARM can provide a low-cost addition as part of a combination of DAA measures to help detect other aircraft.
5.1.6. Traffic Collision Avoidance System (TCAS)
TCAS is widely used on commercial aircraft in combination with ADS-B. Unlike ADS-B, TCAS actively interrogates aircraft transponders to identify intruders and their range, providing both a traffic advisory (i.e., that the traffic is there) and a resolution advisory (i.e., how to respond to avoid a collision) [
71,
72]. However, TCAS only works alongside ADS-B, may not be able to handle multiple intruders, and smaller unmanned aircraft may not be able to be equipped with TCAS due to payload constraints [
73,
74]. Nonetheless, if flights are happening where there are commercial aviation operations present, especially if higher altitudes are being used, then TCAS can provide a useful addition. It is highly situation-dependent, but for most forestry operations, TCAS will not provide any additional safeguard; however, it is worth mentioning in case it is relevant for a particular operation based upon the operating environment.
5.1.7. Command and Control (C2)
Command and Control (C2) links provide necessary bi-directional communication to and from the unmanned aircraft, normally consisting of commands from the operator’s Ground Control Station (GCS) and telemetry on the unmanned aircraft’s operation back to the GCS. C2, by definition, is a separate data stream to payload data (such as imagery) returning from the aircraft. Depending on the technology implemented on the UA to meet the necessary DAA requirements, it may or may not be necessary to have this payload data returned to the GCS; however, C2 links are required for all UA that are not operating completely autonomously (which is beyond the scope of this paper). While radio communication is not strictly limited to VLOS, radio signals refract and attenuate when they encounter obstacles, such as trees, terrain, or atmospheric factors [
22,
23]. The amount of degradation experienced varies greatly, depending upon a large number of variables. Best practice is to consider radio transmission to also have a line of sight, even if the UA is not able to be visually seen by the operator due to distance. Operating BVLOS in a forest environment, therefore, introduces a number of challenges, with similarities to the example shown in
Figure 1.
Many Consumer Off The Shelf (COTS) unmanned aircraft operate within the Industrial Scientific Medical (ISM) bands: primarily on 5.8 and 2.4 GHz. ISM bands are used due to being gazetted under a General Use Radio License (GURL) for Short Range Devices (SRD) in most countries, thereby not requiring any other licensing or certification other than complying with ISM requirements (established by ITU Radio Regulations worldwide, the primary requirement being equipment operating within ISM bands must tolerate interference generated by other ISM applications, and users have no regulatory protection from ISM device operation in these bands.). Due to the relative ease of operating in the ISM bands, many consumer electronics beyond the scope of UA operate on these same bands, such as Wi-Fi and Bluetooth. The prolific use of the 5.8 GHz and 2.4 GHz bands can result in these bands being overpopulated with equipment operating within them, which has led to a number of incidents involving unmanned aircraft [
75]. However, in the comparatively remote locations of forest environments, the flooding of these bands is unlikely. Although the remote locations of many forest operations may result in relatively empty ISM bands, there are other possible radio frequency hazards of remote area operations such as backhaul internet installations and Peer to Peer (P2P) Wi-Fi (for instance to and from milking sheds). Both of these examples use highly directional radiation patterns resulting from using high gain antennas. P2P Wi-Fi use is largely undocumented, and due to the relatively low levels of regulation of the ISM bands, it often operates at power levels beyond legal specification. Backhaul internet and other radio frequency installations may be mapped by commercial service providers [
76]. Mitigations for these installations can include conducting RF surveys of the area using RF spectrum analysers. Using backhaul maps and RF surveys in operational planning, one must also consider possible interference of harmonics; for instance, a 1.2 GHz transmitter will make a 1st harmonic at 2.4 GHz, and a 2nd harmonic at 3.6 GHz.
The relatively high frequencies of the 2.4 and 5.8 GHz bands allow for a higher data rate, providing necessary bandwidth for digital video payload links, as well as the comparatively low bandwidth requirements for C2. Conversely, high frequencies are more easily attenuated by the environment and obstacles. Due to this many modern COTS unmanned aircraft operate on both bands: 5.8 GHz when received signal strength is high, and 2.4 GHz when attenuation happens on 5.8 GHz. This fall back to lower frequencies is associated with a lower data bandwidth and lower bitrate video stream. The amount of radio attenuation experienced by a transmitter varies drastically depending on numerous factors. For forest environments, the density and water content of foliage will have a dramatic effect on the performance of a payload or C2 link. Comparatively lower frequencies (such as the commonly used and gazetted 915 MHz band) are used for C2 links in commercial and military applications due to the lack of radio penetration of higher frequencies. This often results in the operations losing the payload data stream; however, maintaining command and control can allow the aircraft to reposition and resume payload data transmission. These lower frequencies do not support bandwidth capable of conveying data such as video in any meaningful resolution with current technology.
The issue of higher frequencies experiencing greater attenuation and lower frequencies having lower bandwidth is one of the primary issues to solve for BVLOS, particularly in forest environments where the operator and GCS might be below the tree canopy. However, there are a number of available and feasible solutions. Traditional unmanned aircraft C2 links are a Point to Point (PTP) technology, meaning one GCS transmitter/receiver communicating to one aircraft. PTP architecture is comparatively simple, not requiring any further equipment to install (or batteries to charge), and is the most common form of C2 and payload datalink employed in UA operations. Moving beyond PTP architecture can solve many of the inherent problems of radio frequency line of sight, particularly on ISM bands.
Mesh networks are one such radio architecture beyond the PTP links. Unlike PTP networks, mesh networks employ multiple receivers and transmitters, known as nodes, on a network. Nodes are dispersed strategically over the operating area. C2 and Payload data can be transmitted between these nodes over multiple short line of sight paths at higher frequencies, and finally, to and from the aircraft. This offers a number of benefits, such as high bandwidth, as well as the possibility for redundancy, depending on network configuration (data can be broadcast over multiple pathways to get to the aircraft). The downsides of the mesh network are the initial infrastructure cost and the relatively permanent nature of the network (particularly when the mesh is installed over a forestry block, mounted, for instance, in or above the forest canopy). Mesh networks could also offer further DAA options, such as stationary cameras (performing computer-based vision or electro optical traffic tracking) or ADS-B transceivers installed in each node. This concept introduces the possibility of operating relatively unsophisticated UA over a “smart forest”.
Another solution to radio frequency line of sight is the use of a single repeater station which has radio frequency line of sight to the operator’s GCS and the aircraft, while being positioned between them. An example of a repeater would be an unmanned aircraft operating with a hill between the operational area and the operator, with the repeater positioned on top of the hill. This solution offers greater simplicity than a mesh network, and it is likely easier to install. However, it does not offer redundancy. The repeater concept can be taken further, with the repeater mounted on a second unmanned aircraft acting as a satellite and providing line of sight to both the unmanned aircraft and operator. This repeater unmanned aircraft would lend itself to being fixed-wing, lighter-than-air, or a tethered multi-rotor, capable of relatively long loiter times over a relatively fixed position.
Cellular telephone networks, such as 3G/4G/5G have the required bandwidth to handle C2 and payload data streams, and they have been used to operate unmanned aircraft, offering RF ranges as far as the existing cellular network extends. Benefits of this architecture is the use of existing infrastructure rather than an ad hoc network. Cellular networks operate on multiple frequencies and can have exceptional high data throughput capabilities. However, cellular networks are rarely installed with particularly robust coverage in the remote locations where forestry exists. Cellular networks also introduce a large degree of latency in the link, increasing the time between operator input and the UA responding or payload data returning to the GCS. This latency may affect DAA effectiveness and response times.
Other solutions may employ using segregated bands with radio frequencies licensed and reserved for the operator (often at higher than ISM output power and, therefore, range). This, however, incurs regulator and hardware costs. Satellite links are also an option; however, these are more aimed at large, medium/high altitude long endurance (MALE/HALE) unmanned aircraft and military applications, due to their high costs and difficulties with fitting antennae to smaller aircraft [
77,
78]. These may be worth exploring, due to their benefits, but only when there is a sufficient budget or if using large equipment.
5.2. Operational Considerations
This sub-section details alternative mechanisms that may be easier to enact than BVLOS operations to achieve similar effects, as well as common operational considerations that need to be addressed for BVLOS operations in forest environments.
5.2.1. BVLOS or EVLOS+?
One question to ask before performing a BVLOS operation is whether it would be easier to vary typical EVLOS requirements instead. Standard EVLOS requirements involve either the pilot or visual observers having unaided visual line of sight of the aircraft such that they cannot use any tools, such as binoculars, to enhance their vision [
20]. However, sometimes regulatory authorities approve operations that vary this requirement and where visual observers use technology such as binoculars, telescopes, night vision goggles, or zoom lenses to observe the aircraft and airspace at a much greater distance than what is achievable using human vision alone. There needs to be some DAA capabilities built into the aircraft in order to justify an EVLOS+ operation because the use of binoculars limits the field of view, and the magnification means that smaller tracts of airspace are being observed at any given time [
79]. However, the sophistication of the DAA technology can be significantly less than that for a BVLOS operation because the usual VFR rules of see, detect, and avoid can largely be achieved in the usual manner (i.e., visual scanning) under EVLOS+. It is questionable whether EVLOS+ is safer than a BVLOS operation, however, because it works with existing rules and regulations, and it may be easier to achieve the requisite standards for such an approval. The authors could only find one mention of a similar operation in the literature [
80], indicating that this could be an interesting area for future research. Industry experience suggests that this can be more cost-effective than BVLOS (by avoiding the need for highly sophisticated DAA technology) and more practicable than EVLOS (requiring multitudes of visual observers if in a large operating area).
5.2.2. Use of Restricted Airspace (or Other Segregated Airspace)
A simple means of removing airborne risks associated with BVLOS flight is to fly in airspace that does not contain other aircraft [
20]. Most commonly, this would be Restricted Airspace (RA) but could be other segregated airspace, such as Military Operating Areas (MOA). As noted earlier, forestry companies can apply to have the airspace above their estate (up to a certain level) made into Restricted Airspace (either temporary or permanent in nature) such that they can control whether other aircraft can enter that airspace or not [
20]. Countries do vary on their likelihood of giving this airspace and how easy it is to apply for it. However, the general consideration is whether the imposition of Restricted Airspace would disrupt extant aviation operations [
20]. Given that forested areas are typically remote, this approach may make sense for larger estates to avoid the need to purchase sophisticated DAA tools for the aircraft.
5.2.3. Air Band Radio
In manned aviation, air band radio is considered as the second most important aid to situational awareness, sitting only behind visual scanning [
81]. There are two considerations for using air band radio with a BVLOS operation. The first is listening to broadcasts on the local frequency. This is a must for a BVLOS operation that is being conducted in non-segregated airspace. This is because listening to position reports will allow the pilot to form a mental model of how traffic is acting in the airspace surrounding them, thus providing useful information to help detect and avoid other aircraft [
82]. A recent study showed that just over a quarter of unmanned aircraft users listen in to air band radio when conducting operations, primarily when operating above 400 ft AGL, within 4 km of an aerodrome, or within controlled airspace [
21]. These correspond with the types of airspace where this is most useful because there is the greatest potential for manned aircraft to also be operating within these areas [
20]. To be able to make sense of radio calls, there will need to be some training, as well as an awareness of where the operation is taking place so that the pilot will be aware of which locations’ position reports will be made in relation to them (i.e., 5 nautical miles southwest of “location”). For BVLOS operations, it is also advisable to make position reports for the unmanned aircraft to aid another pilot’s situational awareness. However, to be able to make radio calls requires a Flight Radio Telephony Operator’s (FRTO) rating, which is typically held alongside a pilot’s license [
20]. Some countries, such as Australia, have made this easier by providing a means for unmanned aircraft pilots to have an FRTO rating independently of a pilot’s license [
83]. If the operation is taking place in a country where it is not possible for unmanned aircraft pilots to make radio calls, and the pilot in command for the operation does not have a pilot’s license, it may be necessary to have someone with a pilot’s license in the support crew. This relates back to meeting the requirements of the airspace that is being flown within, which, outside of segregated or controlled airspace, means making position reports so that other pilots can maintain situational awareness of traffic in the area.
5.2.4. Job Safety Assessments (JSAs)
JSAs are a formalised way of showing that steps have been taken to reduce risk levels to people, property, and other aircraft to as low as reasonably practicable [
21]. The great thing about them is their flexibility, whereby hazards and associated risks pertinent to a specific operating area can be taken into account and managed, in combination with other operational procedures, to manage more general risks. For example, many airports have their own requirements for flying in their airspace, which are additional to any local aviation regulations [
84]. Just over 20% of unmanned aircraft users typically conduct a job safety assessment prior to flight [
21]. Being familiar with the operating area, aware of risks, and planning flights accordingly is critical for effective risk mitigation [
85], and JSAs provide evidence that this has taken place.
5.2.5. Aeronautical Information
One of the most important aspects of pre-flight planning for a BVLOS operation is to ensure that all aeronautical information is taken into account. At the most basic level, this involves checking what airspace the operation will be within, the requirements of that airspace, and how to comply with those requirements (or if it is even possible to comply with those requirements). Some of the key sources of aeronautical information for unmanned aircraft operators include the Aeronautical Information Publication (AIP), AIP Supplements, Visual Navigation Charts (VNCs), and Notices to Airmen (NOTAMs) [
20]. Each one of these provides information that is relevant for different time intervals. AIPs provide aeronautical information that is of a lasting nature and is essential for air navigation, while the AIP Supplements provide temporary changes to information published in the AIP [
20]. VNCs are probably the most used of the sources of aeronautical information because these visually depict this information, including airspace boundaries, aerodrome locations, special use airspace, and other useful information [
21,
30,
86]. Reading VNCs has been established as a key risk mitigation because of how it assists with flight planning and situational awareness of the surrounding airspace [
85]. Another source of aeronautical information, that unmanned aircraft operators should check prior to operation, are NOTAMs. Unlike other sources of aeronautical information, NOTAMs are issued daily and contain information about temporary changes to aeronautical information or procedures, as well as any temporary hazards that should be taken into account when planning a flight [
21,
87]. This has also been identified as a key risk mitigation step that unmanned aircraft operators should take to help mitigate airborne risks [
36]. The issuance of NOTAMs may also a useful safety precaution for BVLOS operations, as this will make manned aircraft pilots aware of the ongoing operation, the operating area, and times of operation. The importance of this would depend on what airspace and what altitude the operations take place within. When operations are taking place in airspace that is shared with manned aircraft, then, it would be advisable to issue a NOTAM.
5.3. Other Considerations
This sub-section outlines some of the other considerations that should be taken into account when planning BVLOS operations in forest environments. Most of these centre on human factors issues, with deliberate interference being the only issue that does not fit within that domain. These are often important issues for determining how well an operation is performed. However, they are also under-researched in the literature in comparison to more technical considerations.
5.3.1. Training and Competency Requirements
The least predictable component of any system is the human operator [
88]. One way in which this can be more standardised is through formal training and competency requirements that form part of the overall operation. There may be different sources of training and competency requirements. Some requirements are stipulated by government regulators and form part of an application for a license or certification to carry out a certain activity. However, companies often also have internal training and competency requirements that form part of their safety assurance. When considering a BVLOS operation within a forest environment, there are some unique considerations for training. Firstly, the operating environment presents a number of difficulties that have already been outlined in this paper. Pilots and support personnel need to be familiar with these peculiarities and how to manage them. Secondly, there are some unique hazards within this environment that require thorough training on emergency procedures. One salient example is the risk of creating a forest fire due to an accident. Lithium polymer batteries and petroleum (the two most common energy sources) are inflammable and highly flammable, respectively. The organisation should have considered how it would manage post-crash activities when writing their operating manual; however, staff require training on these emergency procedures to ensure that these can be carried out in a timely and coordinated manner. Thirdly, the highly automated nature of the systems means that the role of a pilot is more one of monitoring systems rather than conventional “hand on stick” flying. This means that they need a thorough understanding of the systems that are being used, their failure modes, and when intervention may be necessary or desirable in the interests of safety. Because there are significant differences between platforms and ground control systems, this training needs to be bespoke for the particular operator. Lastly, an assessment of competence cannot be restricted only to flying ability; competency needs to be assessed more holistically. The term operational competency tends to be used for more novel applications, such as BVLOS in forestry, whereby pilots and support crew need to demonstrate competency in the overall operation, including pre-flight procedures, in-flight procedures, post-flight procedures, emergency procedures, and so on. This often means working with training providers to create bespoke competency assessments that provide a sufficient level of safety assurance for the human element of the operation.
5.3.2. Fatigue Risk Management
BVLOS operations take place over larger operational areas, where the ability to perform BVLOS is advantageous, which also means that operations are typically longer endurance than conventional operations. In such instances, it is important to consider duty limits for pilots and visual observers to avoid the negative consequences of fatigue. Fatigue is a state of deep tiredness that impairs performance, particularly motor skills, situational awareness, vision, and personal standards [
88]. There are a number of ways to manage fatigue. Primarily, these centre on schedule optimisation, rest breaks and naps, fatigue aids (e.g., caffeine), and ensuring that crew are practicing good sleep hygiene [
89]. The schedule optimisation is aimed at avoiding duty periods that are excessive and ensuring sufficient rest periods between duties. Rules and guidelines vary internationally for manned aviation. However, differences exist based upon whether the operation is a single crew operation or multi-crew operation and whether the flight is done under Visual Flight Rules (VFR) or Instrument Flight Rules (IFR). To generalise those requirements, a single duty period should not exceed 8–11 h, a pilot should not be scheduled for more than 30–35 h in 7 consecutive days, 90–100 h in 28 consecutive days, or 250–300 h in 90 consecutive days [
90]. In addition to this, employees need to ensure they get at least 8 h of sleep per night, plan sleep ahead of time, and report fatigue [
91]. During multi-crew operations, it may also be possible for an individual crew member to take a short break, which sees some short-term improvement in alertness, or even to take a nap (10–30 min), allowing 30 min post-nap to prevent sleep inertia [
89]. Caffeine is also a useful fatigue countermeasure that increases alertness. However, it does take about 30–50 min to act, its effects wear off after about 4–5 h, and high caffeine intake can have an adverse effect [
89]. Personal sleep practices are also critical, with crew needing to ensure that they get enough rest (most people need between 6–10 h sleep), that they try to avoid sleeping at unusual times (sleep at night to align with circadian rhythms), ensure that their sleeping environment is dark and cool, keep their sleep environments as safe sleep zones (e.g., never use the same area for sleep and work), and avoid detrimental sleep aids such as alcohol, among other things [
92]. As can be seen thus far, fatigue management is both a crew responsibility and an organisational responsibility. If conducting BVLOS operations, which tend to be more complex, it is critical that flight crew do not have their performance impaired due to fatigue. Despite the importance of this topic area within manned aviation, research into pilot fatigue for long-endurance unmanned aircraft has primarily been within military applications [
93,
94,
95] and often calls for further research due to the lack of data on this issue. This presents a potentially useful area for future research, given the likely increase in long-range BVLOS operations in coming years.
5.3.3. Crew Resource Management
While not necessarily the case, most BVLOS operations require multiple crew members. In such instances, it is important that all crew members are empowered to perform their roles effectively. This process is termed Crew Resource Management (CRM) within aviation and is a compulsory subject area for the issuance of pilot’s licenses. Good CRM means that the tasks associated with a particular flight are organised and distributed such that all of the crew’s resources are applied in a safe and efficient manner [
88]. For this reason, it is important that organisations doing BVLOS operations in forest environments have ensured that CRM training is provided, either internally or externally, to staff to ensure that multi-crew operations are effectively managed. While limited, there is already some literature that supports the need for CRM training for large and complex unmanned aircraft operations [
96,
97,
98].
5.3.4. Ergonomic Design of Ground Control Systems
An area that has only received limited attention is the design of the ground control systems in such a way that takes into account the human body and expectations around how things should be controlled. Anecdotally, the authors have come across systems that cause discomfort or are confusing for a human operator. There are no international standards enforced upon the design of ground control systems, however, and that is true for many aspects of unmanned aviation. Some have suggested that standards could be borrowed from closely related areas, such as general-purpose computer workstations [
99]. However, others have suggested that a combination of human–computer interface standards and conventional cockpit design is required as ground control systems for unmanned aircraft resemble both systems, though they also have distinct differences [
100]. Either way, as BVLOS operations become more prevalent, it is critical that the principles of ergonomics are also applied to the design of ground control systems in order to minimise the potential for design-induced errors.
5.3.5. Drugs and Alcohol
Drugs and alcohol are major concerns within the aviation context, with states often imposing strict regulations to manage associated risks. Alcohol is widely consumed, but it does cause performance detriments, primarily, in relation to cognitive and sensory functions [
101]. While regulations vary between countries, they usually consist of a minimum stand-down period following any consumption of alcohol called the “bottle to throttle” rule (usually 8 or 12 h), which is the requirement to not pilot an aircraft unless your blood alcohol level is zero and to not pilot an aircraft under the influence of alcohol even if your blood alcohol level is zero [
102,
103]. This latter point is important in capturing the ongoing impairment associated with hangovers. These are standards that should also be applied to unmanned aircraft operators to prevent any alcohol-associated impairment. Past research also suggests that pilots with previous convictions for driving while intoxicated are twice as likely to be involved in a pilot-error accident [
104], providing a good basis for background checks regarding past compliance with transport regulations.
Drugs can be divided into two categories of concern for unmanned aircraft pilots: the first are over-the-counter and prescription medicines, and the second are illicit substances. Over-the-counter and prescription medicines are legal substances, but that does not mean that they will be compatible with safe flying. All drugs are taken with the intention of affecting the human body, which means that they may have side-effects that are detrimental to human performance. Antihistamines are an example of a widely taken drug for hay fever that have a sedative effect and may be incompatible with safe flight (depending on the exact medicine and dose) [
88]. Unmanned aircraft pilots should always check with their doctor as to whether a particular medicine they are prescribed or intend on taking is compatible with safe flight; in specialised cases, an aviation doctor may also be more appropriate to consult. Illicit drugs, on the other hand, are illegal and, often, consumption of these would result in loss of a pilot’s license in manned aviation. Some of these are also being legalised in some parts of the world, such as marijuana. In this instance, it needs to be viewed in a similar manner to alcohol, whereby its consumption may take place, but this should never affect performance in the workplace. Pilot performance has been shown to be impaired as long as 24 h after a social dose of marijuana, though the subjects are unlikely to be aware of its effects at this time [
105]. It has been suggested that, since 1991, when the aforementioned study was conducted, the impact will have likely increased, as the potency of marijuana has begun to increase [
106]. The key symptoms are impairments of a cognitive and psychomotor nature [
106]. A 2011 research article that compared 10 years of drug testing data for employees in the United States commercial aviation industry found that the prevalence of drug violations (specifically for marijuana, cocaine, amphetamines, opiates, and phencyclidine) were 0.64% in random drug tests compared with 1.82% for post-accident tests, meaning that the odds of being involved in an accident was three times higher for those that tested positive than those who tested negative [
107]. While not mandatory for unmanned aircraft operators, random drug and alcohol testing is widely used in the aviation industry to counter the effects of drugs and alcohol upon pilot performance. Unmanned aircraft operators should voluntarily undertake this in line with a clear drugs and alcohol policy to ensure that pilots involved in complex operations, such as BVLOS in forest environments, do not have their performance impaired by drugs or alcohol.
5.3.6. Deliberate Interference
While seemingly not addressed in the literature (to the best of the authors’ knowledge), one risk that needs to be thought through with BVLOS operations in forest environments is the potential for deliberate interference with the unmanned aircraft being operated. Anecdotally, the authors are aware of such instances within New Zealand. The potential for this is that criminal activity in cultivating illegal drugs such as marijuana and cocaine often takes place in remote forest environments on public lands [
108,
109,
110]. As unmanned aircraft become more commonly used by enforcement powers and government authorities, it is possible that an unmanned aircraft being used for legitimate purposes in a forest environment may be confused with law enforcement unmanned aircraft. In such instances, it is possible that the unmanned aircraft may be shot down. This is a risk that needs to be considered when operating over forest environments where it is known that there may be cultivation of illegal crops. Options include not conducting the operation, publicising the operation and its purpose in the hope of getting the word out, or even direct contact with organisations that are known to be involved with such activities. The latter option does also present ethical issues. However, those are outside of scope for this paper. As this risk appears to be undocumented in the literature, it would be useful to see research on the frequency of illegal interference with unmanned aircraft operations and also what measures operators are using the mitigate the likelihood of such occurrences.
5.4. Taking a Risk-Based Approach to BVLOS Operations in Forest Environments: Executive Summary
- -
A risk-based approach will require incorporation of Detect and Avoid (DAA) technologies, consideration of C2 links, the detailing of operational procedures, and carefully managing human factors.
- -
The best DAA technology will depend upon the operating environment and the airspace classifications above that forest environment. In the case of varying operating environments, a combination of DAA technologies will likely be necessary.
- -
It is important to ensure that BVLOS is actually necessary and that alternatives, such as EVLOS+, will not be sufficient for the task.
- -
The operating manuals would need to clearly detail risk mitigations, such as JSA’s, training requirements, fatigue risk management, and drug and alcohol policies.
6. Directions for Future Research
Throughout this review article, different facets of considerations for BVLOS operations in forest environments have been considered. Some of these have been substantially researched in the literature, and clear answers are provided to help guide such operations. However, some areas have either been sparsely researched or not researched at all. This section provides some of the highlight items that have been identified as fruitful areas for future research.
6.1. Smart Forests
One idea raised during the course of this paper was that of smart forests, whereby you could use a relatively simple unmanned aircraft, but where there are technological aids built around the forest environment to facilitate quasi-BVLOS flight. For example, the use of electro-optical cameras installed around the forest area that can be used to track the unmanned aircraft such that an artificial line of sight is maintained, similar to with EVLOS+. This may be easier from a regulatory point of view and may also be cheaper than having an aircraft with the necessary DAA capabilities. However, that is uncertain until such an idea is trialled and costs and challenges ascertained. The authors argue that such research would make a useful and pragmatic contribution to the literature.
6.2. Sub-Canopy Operations
Another idea raised during the paper was the idea of sub-canopy operations. These have been trialled on a limited scale, but they do not appear to be addressed in the literature. While many operations would not make sense to do under the canopy, basic technologies can be applied to facilitate sub-canopy operations. These are easier from a risk mitigation point of view: If you can close off the forest environment (e.g., a specific stand within a forest estate), then there is no risk to people, and being sub-canopy means there is no risk to aircraft. An automated flight sub-canopy would inevitably take longer, but that needs to be weighed up against the substantial cost of doing BVLOS above the canopy. Future research that examines the viability of sub-canopy operations to collect scientific data would be useful, especially if a comparison can be made with operations above the canopy. That would allow for meaningful comparison and the potential to identify logical applications of this type of operation.
6.3. Human Factors Issues
A number of human factors considerations were addressed in this paper, including training and competency, fatigue, CRM, ergonomics, and drugs and alcohol. However, there are other areas that are not addressed in this paper, such as boredom in highlight automated environments, communication, checklists, and others. As a general observation, the literature dealing with technical aspects of unmanned aircraft systems is quite developed, while human factors aspects are largely unaddressed or only addressed in a limited manner. Experience from manned aviation suggests that the biggest potential for an accident lies with human errors at different levels within a system. This area of research needs to be prioritised to prevent accidents from occurring due to human factors issues that could have been managed. Some of this work may involve translating literature from manned aviation, as has been done in this paper. However, there are some peculiarities of unmanned aircraft operations that warrant their own areas of research: For example, the lack of sensory inputs for a pilot from not being on board the aircraft presents a challenge when establishing situational awareness.
6.4. Deliberate Interference
One peculiarity of the forest environment is the potential to fly over areas that are being used for the illegal cultivation of crops, particularly those associated with producing illicit drugs. Considering this, there is a risk of deliberate interference with the unmanned aircraft, such as having it shot down by a criminal entity. This topic appears to be absent from the literature. Given that practitioners are already managing this issue in a few different ways, there is an opportunity for future research to study the prevalence of deliberate interference in forest environments and the sorts of procedures that practitioners are already using to manage this threat.
6.5. Emergency Procedures
As we have discussed, fire risk is a particular concern when flying UAVs over forest environments, owing to the flammability of batteries and fuels used in their propulsion. In line with international aviation legislation, any BVLOS operation will have to demonstrate that the safety of people and property that are being flown over are being taken into consideration and risks are mitigated accordingly. The mitigation of these risks has been largely covered within this manuscript. However, forest environments can be extremely large and inaccessible, and if these mitigations do fail, emergency management is a critical factor that needs to be considered in how to access and manage an incident. Further research in this area would be a great benefit to the unmanned aviation community, and a particularly interesting area would be to examine what practitioners are currently doing for emergency management, as well as the commonalities for the development of future practice.
6.6. Future Pathways for BVLOS in Forested Environments
Although BVLOS is possible with UAV operations in forested environments, especially when building a model for a Hard BVLOS scenario, which would likely carry greater financial support, for the average forester looking to conduct Soft BVLOS operations to collect operational data over a small stand, the reality is that, without closing airspace or hiring a MEWP, the technology and compliance costs prevent significant barriers for entry. In order for BVLOS to become as simple as conducting typical VLOS operations, the technology needs to become cheaper, more robust, be rigorously tested, certified, and off-the-shelf. Airspace integration must also be addressed, thoroughly proven, and put in place. With these aspects addressed, we foresee that UAV operations with BVLOS, in forested areas, could become as routine as capturing photogrammetric data over a cornfield.
In the near term, two novel ways that these barriers are being overcome can be observed in Australia and the United States. In Australia, CASA have implemented regulations for BVLOS in remote areas, which enable CASA to grant clearance for BVLOS operations, if they fit within certain bounds and if it can be proven that they are in a remote area. In the United States, the FAA makes it relatively simple to apply for Temporary Restricted Areas (TFRs) using special use airspace in an effective manner to de-conflict airspace for BVLOS operations.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}