
Energy Efficient Transmission Design for NOMA Backscatter-Aided UAV Networks with Imperfect CSI

 ,
, 
 and
and
Abstract
:1. Introduction
1.1. Recent Works on Backscatter Communications
1.2. Motivation and Contributions
- A NOMA ABC-aided UAV network is considered in which multiple UAVs transmit superimposed signals to the IoT in their coverage areas using a NOMA protocol. Meanwhile, BSTs also receive UAV signals, add valuable data, and reflect it towards the IoT. On the receiver side, the IoT with strong channel conditions applies SIC to decode the signal received from the UAV and the BST by subtracting the information of other IoT with poor channel conditions. However, the last IoT cannot apply SIC and decode the received signal from the UAV and the BST directly by treating the signal of the first IoT as noise. This work aims to minimize the power consumption of the NOMA ABC-aided UAV network by efficiently allocating the available system resources under the assumption of imperfect channel information.
- The formulated power minimization problem is not convex due to inter-UAV interference among UAVs, NOMA interference, and interference of imperfect CSI. Thus, solving the problem directly and obtaining the optimal solution is challenging and complex. Therefore, we transform it and then adopt a sub-gradient approach for an efficient solution. According to this method, all the optimization variables and multipliers are updated in each iteration until convergence. For comparison, we proposed an optimization framework for the traditional NOMA UAV network without involving ABC.
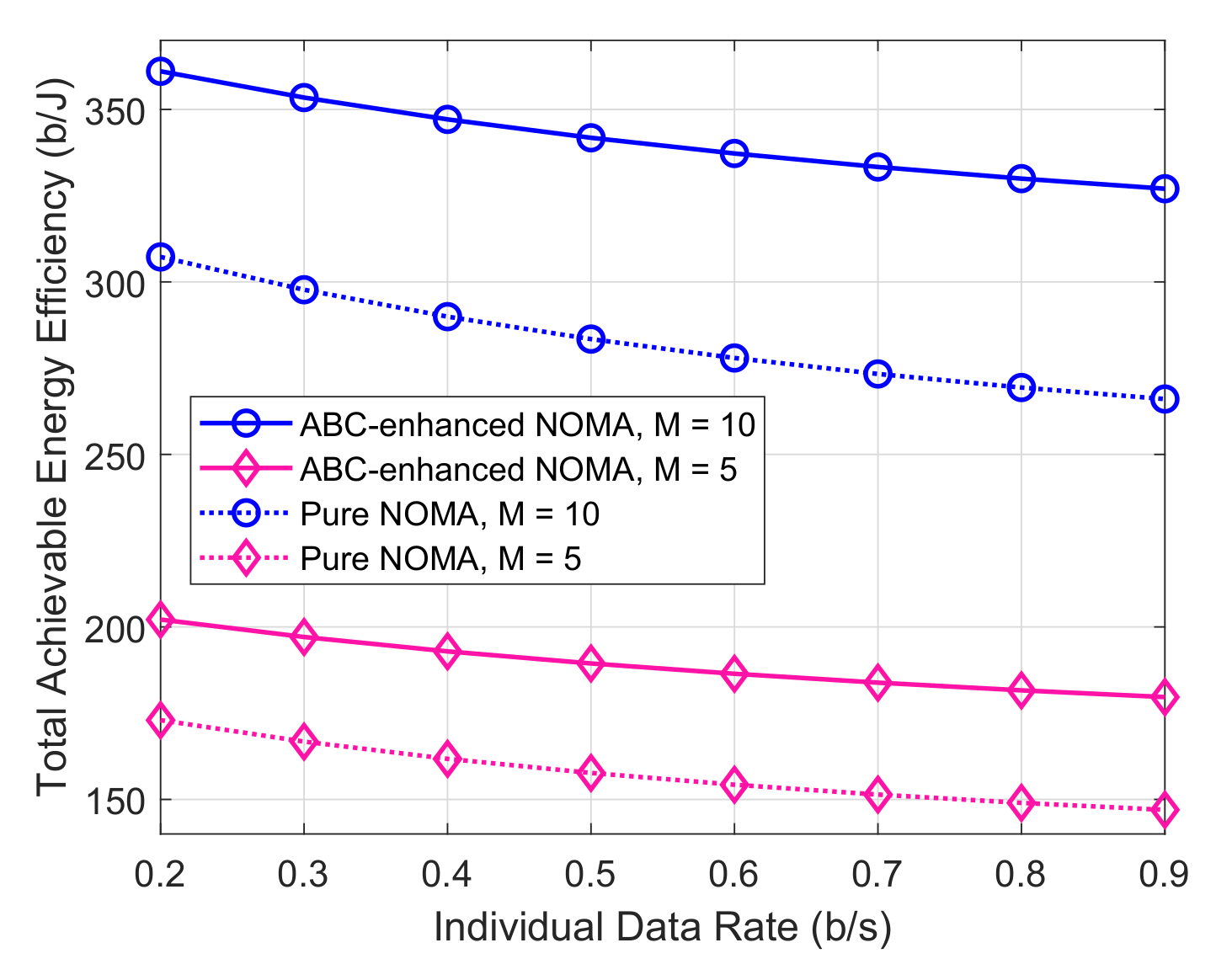
- To validate our proposed framework, we obtain numerical results using Monte Carlo simulations for the NOMA ABC-aided UAV network and the benchmark NOMA UAV network without ABC. Results demonstrate the benefits of the ABC-aided NOMA UAV network compared to the benchmark network. Moreover, results also show the effect of imperfect channel information on the overall system’s achievable energy efficiency. Furthermore, the impact of other optimization parameters, such as minimum quality of services of individual IoT, transmit power of each UAV, and the number of UAVs, is also depicted. The results reveal that using ABC in NOMA UAV networks can significantly improve the total achievable energy efficiency of the system.
1.3. Paper Organization
2. System Model and Problem Formulation
3. Proposed Optimization Solution
4. Numerical Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Giordani, M.; Polese, M.; Mezzavilla, M.; Rangan, S.; Zorzi, M. Toward 6G networks: Use cases and technologies. IEEE Commun. Mag. 2020, 58, 55–61. [Google Scholar] [CrossRef]
- Khan, W.U.; Lagunas, E.; Ali, Z.; Javed, M.A.; Ahmed, M.; Chatzinotas, S.; Ottersten, B.; Popovski, P. Opportunities for physical layer security in UAV communication enhanced with intelligent reflective surfaces. arXiv, 2022; arXiv:2203.16907. [Google Scholar]
- Khan, W.U.; Ihsan, A.; Nguyen, T.N.; Javed, M.A.; Ali, Z. NOMA-enabled backscatter communications for green transportation in automotive-Industry 5.0. IEEE Trans. Ind. Inform. 2020. [Google Scholar] [CrossRef]
- Sarieddeen, H.; Saeed, N.; Al-Naffouri, T.Y.; Alouini, M.S. Next generation terahertz communications: A rendezvous of sensing, imaging, and localization. IEEE Commun. Mag. 2020, 58, 69–75. [Google Scholar] [CrossRef]
- Khan, W.U.; Jameel, F.; Li, X.; Bilal, M.; Tsiftsis, T.A. Joint spectrum and energy optimization of NOMA-enabled small-cell networks with QoS guarantee. IEEE Trans. Veh. Technol. 2021, 70, 8337–8342. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Ali, Z.; Farooq, W.; Khan, W.U.; Qureshi, M.; Sidhu, G.A.S. Artificial intelligence techniques for rate maximization in interference channels. Phys. Commun. 2021, 47, 101294. [Google Scholar] [CrossRef]
- Van Huynh, N.; Hoang, D.T.; Lu, X.; Niyato, D.; Wang, P.; Kim, D.I. Ambient backscatter communications: A contemporary survey. IEEE Commun. Surv. Tutor. 2018, 20, 2889–2922. [Google Scholar] [CrossRef] [Green Version]
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A comprehensive survey on UAV communication channel modeling. IEEE Access 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Yang, W.; Guan, X.; Wu, Q. Uav-enabled relay communication under malicious jamming: Joint trajectory and transmit power optimization. IEEE Trans. Veh. Technol. 2021, 70, 8275–8279. [Google Scholar] [CrossRef]
- Ihsan, A.; Chen, W.; Asif, M.; Khan, W.U.; Li, J. Energy-efficient IRS-aided NOMA beamforming for 6G wireless communications. arXiv, 2022; arXiv:2203.16099. [Google Scholar]
- Haider, S.K.; Jiang, A.; Almogren, A.; Rehman, A.U.; Ahmed, A.; Khan, W.U.; Hamam, H. Energy efficient UAV flight path model for cluster head selection in next-generation wireless sensor networks. Sensors 2021, 21, 8445. [Google Scholar] [CrossRef]
- Xu, Y.; Qin, Z.; Gui, G.; Gacanin, H.; Sari, H.; Adachi, F. Energy efficiency maximization in NOMA enabled backscatter communications with QoS guarantee. IEEE Wirel. Commun. Lett. 2020, 10, 353–357. [Google Scholar] [CrossRef]
- Jameel, F.; Khan, W.U.; Shah, S.T.; Ristaniemi, T. Towards intelligent IoT networks: Reinforcement learning for reliable backscatter communications. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Khan, W.U.; Li, X.; Zeng, M.; Dobre, O.A. Backscatter-enabled NOMA for future 6G systems: A new optimization framework under imperfect SIC. IEEE Commun. Lett. 2021, 25, 1669–1672. [Google Scholar] [CrossRef]
- Liao, Y.; Yang, G.; Liang, Y.C. Resource allocation in NOMA-enhanced full-duplex symbiotic radio networks. IEEE Access 2020, 8, 22709–22720. [Google Scholar] [CrossRef]
- Yang, G.; Yuan, D.; Liang, Y.C.; Zhang, R.; Leung, V.C. Optimal resource allocation in full-duplex ambient backscatter communication networks for wireless-powered IoT. IEEE Internet Things J. 2018, 6, 2612–2625. [Google Scholar] [CrossRef] [Green Version]
- Khan, W.U.; Jameel, F.; Ihsan, A.; Waqar, O.; Ahmed, M. Joint optimization for secure ambient backscatter communication in NOMA-enabled IoT networks. Digit. Commun. Netw. 2022. [Google Scholar] [CrossRef]
- Zhuang, Y.; Li, X.; Ji, H.; Zhang, H.; Leung, V.C. Optimal resource allocation for RF-powered underlay cognitive radio networks with ambient backscatter communication. IEEE Trans. Veh. Technol. 2020, 69, 15216–15228. [Google Scholar] [CrossRef]
- Xu, Y.; Gu, B.; Hu, R.Q.; Li, D.; Zhang, H. Joint computation offloading and radio resource allocation in MEC-based wireless-powered backscatter communication networks. IEEE Trans. Veh. Technol. 2021, 70, 6200–6205. [Google Scholar] [CrossRef]
- Khan, W.U.; Imtiaz, N.; Ullah, I. Joint optimization of NOMA-enabled backscatter communications for beyond 5G IoT networks. Internet Technol. Lett. 2021, 4, e265. [Google Scholar] [CrossRef]
- Li, X.; Zheng, Y.; Khan, W.U.; Zeng, M.; Li, D.; Ragesh, G.K.; Li, L. Physical layer security of cognitive ambient backscatter communications for green Internet-of-Things. IEEE Trans. Green Commun. Netw. 2021, 5, 1066–1076. [Google Scholar] [CrossRef]
- Ahmed, M.; Khan, W.U.; Ihsan, A.; Li, X.; Li, J.; Tsiftsis, T.A. Backscatter sensors communication for 6G low-powered NOMA-enabled IoT networks under imperfect SIC. arXiv, 2021; arXiv:2109.12711. [Google Scholar]
- Khan, W.U.; Nguyen, T.N.; Jameel, F.; Jamshed, M.A.; Pervaiz, H.; Javed, M.A.; Jäntti, R. Learning-based resource allocation for backscatter-aided vehicular networks. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Jameel, F.; Khan, W.U.; Jamshed, M.A.; Pervaiz, H.; Abbasi, Q.; Jäntti, R. Reinforcement learning for scalable and reliable power allocation in SDN-based backscatter heterogeneous network. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 1069–1074. [Google Scholar]
- Hua, M.; Yang, L.; Li, C.; Wu, Q.; Swindlehurst, A.L. Throughput maximization for UAV-aided backscatter communication networks. IEEE Trans. Commun. 2020, 68, 1254–1270. [Google Scholar] [CrossRef] [Green Version]
- Farajzadeh, A.; Ercetin, O.; Yanikomeroglu, H. UAV data collection over NOMA backscatter networks: UAV altitude and trajectory optimization. In Proceedings of the IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–7. [Google Scholar]
- Tran-Dinh, H.; Gautam, S.; Chatzinotas, S.; Ottersten, B. Throughput Maximization for Backscatter-and Cache-Assisted Wireless Powered UAV Technology. IEEE Trans. Veh. Technol. 2022, 71, 5187–5202. [Google Scholar] [CrossRef]
- Han, R.; Bai, L.; Wen, Y.; Liu, J.; Choi, J.; Zhang, W. UAV-aided backscatter communications: Performance analysis and trajectory optimization. IEEE J. Sel. Areas Commun. 2021, 39, 3129–3143. [Google Scholar] [CrossRef]
- Hu, J.; Cai, X.; Yang, K. Joint trajectory and scheduling design for UAV aided secure backscatter communications. IEEE Wirel. Commun. Lett. 2020, 9, 2168–2172. [Google Scholar] [CrossRef]
- Yang, S.; Deng, Y.; Tang, X.; Ding, Y.; Zhou, J. Energy efficiency optimization for UAV-assisted backscatter communications. IEEE Commun. Lett. 2019, 23, 2041–2045. [Google Scholar] [CrossRef] [Green Version]
- Yang, G.; Dai, R.; Liang, Y.C. Energy-efficient UAV backscatter communication with joint trajectory design and resource optimization. IEEE Trans. Wirel. Commun. 2020, 20, 926–941. [Google Scholar] [CrossRef]
- Hua, M.; Swindlehurst, A.L.; Li, C.; Yang, L. UAV-aided backscatter networks: Joint UAV trajectory and protocol design. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019. [Google Scholar]
- Zamani, M.R.; Eslami, M.; Khorramizadeh, M.; Ding, Z. Energy-efficient power allocation for NOMA with imperfect CSI. IEEE Trans. Veh. Technol. 2018, 68, 1009–1013. [Google Scholar] [CrossRef]
- Ihsan, A.; Chen, W.; Zhang, S.; Xu, S. Energy-efficient NOMA multicasting system for beyond 5G cellular V2X communications with imperfect CSI. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Scenario | Objective | UAV/Backscatter | Technique | CSI |
|---|---|---|---|---|---|
| [14] | Single cell | Energy efficiency | Single/single | Dinkelbach and dual theory | Perfect |
| [15] | Single cell | Efficient capacity | None/multiple | Reinforcement learning | Perfect |
| [16] | Single cell | Spectral efficiency | None/single | Dual theory and KKT conditions | Perfect |
| [17] | Single cell | Throughput | None/multiple | Block coordinated descent and successive convex optimization | Perfect |
| [18] | Single cell | Max-min throughput | None/multiple | Block coordinated descent and successive convex optimization | Perfect |
| [19] | Single cell | Secrecy rate | None/single | Dual theory | Perfect |
| [20] | Single | Throughput | None/multiple | Lagrangian method | Perfect |
| [21] | Single cell | Energy efficiency | None/multiple | Alternating optimization and Dual theory | Perfect |
| [22] | Single cell | Spectral efficiency | None/single | Dual theory and KKT conditions | Perfect |
| [23] | Single cell | Outage probability and intercept probability | None/single | Asymptotic expressions and approximate expressions | Perfect |
| [24] | Multi cell | Energy efficiency | None/multiple | Dinkelbach and dual theory | Perfect |
| [25] | Multi cell | Utility | None/multiple | Reinforcement learning and supervised deep learning | Perfect |
| [26] | Multi cell | Interference management | None/multiple | Reinforcement learning | Perfect |
| [27] | Single cell | Throughput | Single/single | Block coordinated descent and successive convex optimization | Perfect |
| [28] | Single cell | Throughput | Single/multiple | Exhaustive search | Perfect |
| [29] | Single cell | Throughput | Single/single | Block coordinated descent and successive convex optimization | Perfect |
| [30] | Single cell | BER and Energy efficiency | multiple/multiple | Closed-form solution for BER | Perfect |
| [31] | Single cell | Secrecy rate | Single/multiple | Block coordinate descent | Perfect |
| [32] | Single cell | Energy efficiency | Single/multiple | Golden section | Perfect |
| [33] | Single cell | Energy efficiency | Single/multiple | Block coordinated decent | Perfect |
| [Our] | Multi cell | Energy efficiency | Multiple/multiple | Sub-gradient and alternating optimization | Imperfect |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
AlJubayrin, S.; Al-Wesabi, F.N.; Alsolai, H.; Duhayyim, M.A.; Nour, M.K.; Khan, W.U.; Mahmood, A.; Rabie, K.; Shongwe, T. Energy Efficient Transmission Design for NOMA Backscatter-Aided UAV Networks with Imperfect CSI. Drones 2022, 6, 190. https://doi.org/10.3390/drones6080190
AlJubayrin S, Al-Wesabi FN, Alsolai H, Duhayyim MA, Nour MK, Khan WU, Mahmood A, Rabie K, Shongwe T. Energy Efficient Transmission Design for NOMA Backscatter-Aided UAV Networks with Imperfect CSI. Drones. 2022; 6(8):190. https://doi.org/10.3390/drones6080190
Chicago/Turabian StyleAlJubayrin, Saad, Fahd N. Al-Wesabi, Hadeel Alsolai, Mesfer Al Duhayyim, Mohamed K. Nour, Wali Ullah Khan, Asad Mahmood, Khaled Rabie, and Thokozani Shongwe. 2022. "Energy Efficient Transmission Design for NOMA Backscatter-Aided UAV Networks with Imperfect CSI" Drones 6, no. 8: 190. https://doi.org/10.3390/drones6080190
APA StyleAlJubayrin, S., Al-Wesabi, F. N., Alsolai, H., Duhayyim, M. A., Nour, M. K., Khan, W. U., Mahmood, A., Rabie, K., & Shongwe, T. (2022). Energy Efficient Transmission Design for NOMA Backscatter-Aided UAV Networks with Imperfect CSI. Drones, 6(8), 190. https://doi.org/10.3390/drones6080190