



Path Planning for Autonomous Drones: Challenges and Future Directions

Abstract
:1. Introduction
2. Drone Classification
3. Current Challenges
3.1. Energy Constraints
3.2. Onboard Computational Capabilities
3.3. Weather Conditions
3.4. Dynamic Environments
4. Drone Path Planning Problem
5. Path Planning Algorithms
5.1. Environmental Representation
5.2. Path Generation
6. Analysis
6.1. Analysis of Recent Studies
- Dimension: Studies included the spatial dimension for which the path planning algorithm was proposed. The algorithm was either suggested for 2D or 3D environments.
- Energy Constraints: Studies analyzed factors other than path length in their cost function. Various factors, such as payload, weight, wind, motor thrust, drone maneuvers, can affect the battery performance of drones [19].
- Path Optimization: Flight trajectory is important, particularly for fixed-wing drones. Since fixed-wing drones have limited turning angles, often Dubins curves or Bezier curves are used to ensure the path is feasible. Path smoothening techniques have also been applied to rotary-wing drones to allow for continuous motion and prevent the drone from having to come to a complete stop.
- Drone Type: Fixed-wing drones (F), rotary-wing drones (R), or the paper did not specify which type of drone the algorithm was intended for (N).
- Path Planner: The algorithm was developed as an online path planner to compute paths in real time (ON) or as an offline path planner (OFF).
- Obstacle Type: The algorithm can generate a path in an environment with stationary obstacles (ST) or moving obstacles (MV).
- Environment Type: Type of environment used for testing. We defined a small-sized environment as having 0–50 obstacles (S), a medium-sized environment as having 51–500 obstacles (M), and a large-sized environment as having more than 500 obstacles (L).
- Computer Simulations: Studies indicated whether computer simulations were used to validate the algorithm.
- Drone Implementation: Studies indicated whether the algorithm was tested on physical drones in an indoor (I) or outdoor (O) setting.
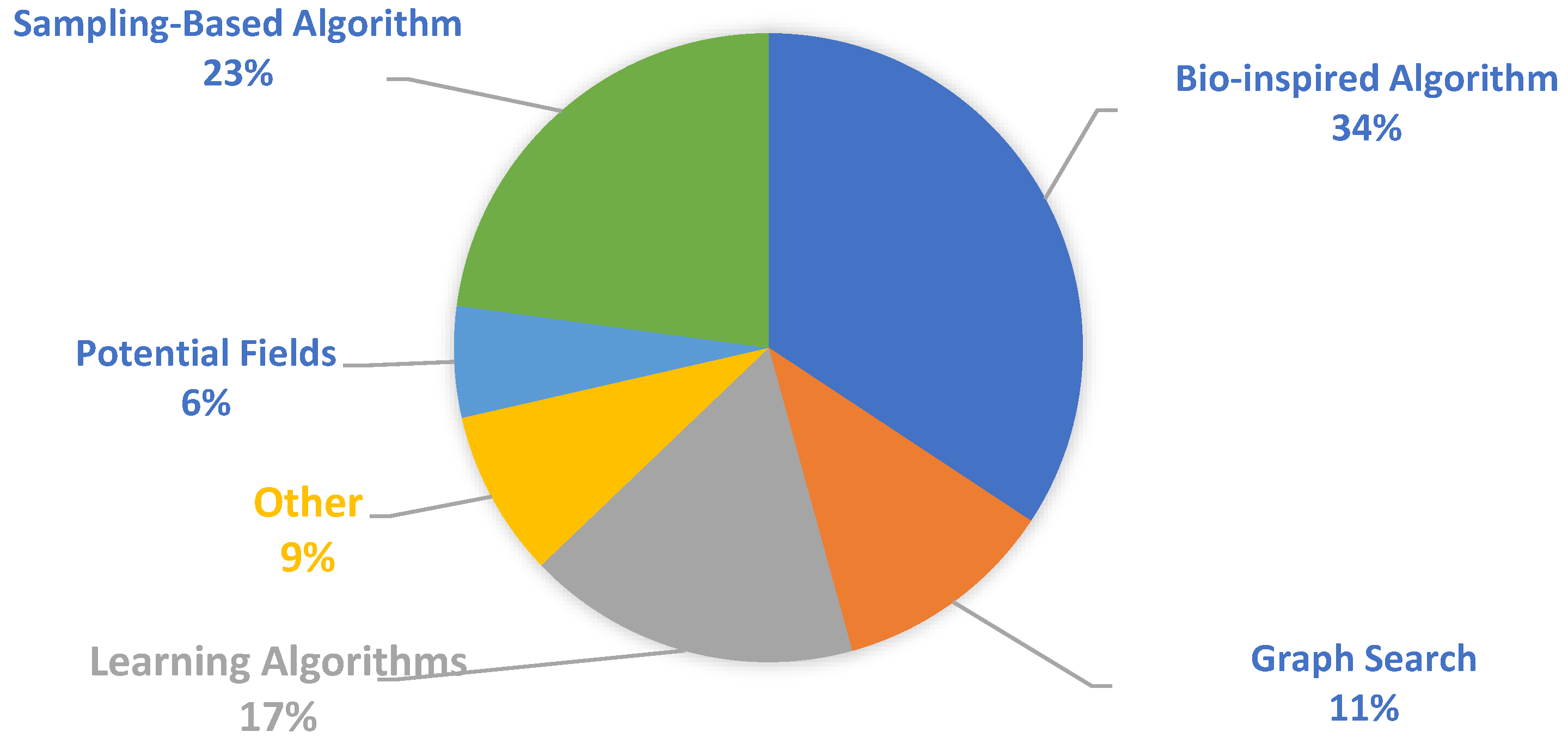
- Algorithm Category: We categorized the approach taken as either bio-inspired algorithm (BA), graph search (GS), learning algorithm (LA), other (OT), potential fields (PF), or sampling-based algorithm (SBA).
6.2. Future Directions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- FAA Aerospace Forecasts 2021–2041. Available online: https://www.faa.gov/data_research/aviation/aerospace_forecasts/media/Unmanned_Aircraft_Systems.pdf (accessed on 27 November 2022).
- Li, Y.; Liu, M.; Jiang, D. Application of Unmanned Aerial Vehicles in Logistics: A Literature Review. Sustainability 2022, 14, 14473. [Google Scholar] [CrossRef]
- Rejeb, A.; Abdollahi, A.; Rejeb, K.; Treiblmaier, H. Drones in agriculture: A review and bibliometric analysis. Comput. Electron. Agric. 2022, 198, 107017. [Google Scholar] [CrossRef]
- A Drone Program Taking Flight. Available online: https://blog.aboutamazon.com/transportation/a-drone-program-taking-flight (accessed on 27 November 2022).
- Huang, H.; Savkin, A.V.; Huang, C. Reliable Path Planning for Drone Delivery Using a Stochastic Time-Dependent Public Transportation Network. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4941. [Google Scholar] [CrossRef]
- Boskovic, J.D.; Prasanth, R.; Mehra, R.K. A multilayer control architecture for unmanned aerial vehicles. In Proceedings of the 2002 American Control Conference, Anchorage, AK, USA, 8–10 May 2002; Volume 3, pp. 1825–1830. [Google Scholar]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Path planning using 3D Dubins Curve for Unmanned Aerial Vehicles. In Proceedings of the International Conference on Unmanned Aircraft Systems, Orlando, FL, USA, 27–30 May 2014; pp. 296–304. [Google Scholar]
- Yang, K.; Keat Gan, S.; Sukkarieh, S. A Gaussian process-based RRT planner for the exploration of an unknown and cluttered environment with a UAV. Adv. Robot. 2013, 27, 431–443. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Sampling-Based Path Planning for UAV Collision Avoidance. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3179–3192. [Google Scholar] [CrossRef]
- Burke, C.; McWhirter, P.R.; Veitch-Michaelis, J.; McAree, O.; Pointon, H.A.G.; Wich, S.; Longmore, S. Requirements and Limitations of Thermal Drones for Effective Search and Rescue in Marine and Coastal Areas. Drones 2019, 3, 78. [Google Scholar] [CrossRef] [Green Version]
- Leutenegger, S.; Hurzeler, C.; Stowers, A.K.; Alexis, K.; Achtelik, M.W.; Lentink, D.; Oh, P.Y.; Siegwart, R. Flying Robots. Springer Handbook of Robotics; Springer: Berlin, Germany, 2016; pp. 623–670. [Google Scholar]
- Norouzi Ghazbi, S.; Aghli, Y.; Alimohammadi, M.; Akbari, A. Quadrotors unmanned aerial vehicles: A review. Int. J. Smart Sens. Intell. Syst. 2016, 9, 309–333. [Google Scholar]
- Oakey, A.; Waters, T.; Zhu, W.; Royall, P.G.; Cherrett, T.; Courtney, P.; Majoe, D.; Jelev, N. Quantifying the Effects of Vibration on Medicines in Transit Caused by Fixed-Wing and Multi-Copter Drones. Drones 2021, 5, 22. [Google Scholar] [CrossRef]
- Ma, H.; Song, B.; Pei, Y.; Chen, Z. Efficiency Change of Control Surface of a Biomimetic Wing Morphing UAV. IEEE Access 2020, 8, 45627–45640. [Google Scholar] [CrossRef]
- Okulski, M.; Ławryńczuk, M. A Small UAV Optimized for Efficient Long-Range and VTOL Missions: An Experimental Tandem-Wing Quadplane Drone. Appl. Sci. 2022, 12, 7059. [Google Scholar] [CrossRef]
- Derrouaoui, S.H.; Bouzid, Y.; Guiatni, M.; Dib, I. A Comprehensive Review on Reconfigurable Drones: Classification, Characteristics, Design and Control Technologies. Unmanned Syst. 2022, 10, 3–29. [Google Scholar] [CrossRef]
- Valenti, F.; Giaquinto, D.; Musto, L.; Zinelli, A.; Bertozzi, M.; Broggi, A. Enabling Computer Vision-Based Autonomous Navigation for Unmanned Aerial Vehicles in Cluttered GPS-Denied Environments. In Proceedings of the International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018; pp. 3886–3891. [Google Scholar]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive Energy Consumption Model for Unmanned Aerial Vehicles, Based on Empirical Studies of Battery Performance. IEEE Access 2018, 6, 58383–58394. [Google Scholar] [CrossRef]
- Morbidi, F.; Cano, R.; Lara, D. Minimum-energy path generation for a quadrotor UAV. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 1492–1498. [Google Scholar]
- Abdilla, A.; Richards, A.; Burrow, S. Power and endurance modelling of battery-powered rotorcraft. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–3 October 2015; pp. 675–680. [Google Scholar]
- Ahmed, F.; Jenihhin, M.A. Survey on UAV Computing Platforms: A Hardware Reliability Perspective. Sensors 2022, 22, 6286. [Google Scholar] [CrossRef] [PubMed]
- Oyuki Rojas-Perez, L.; Martinez-Carranza, J. On-board processing for autonomous drone racing: An overview. Integration 2021, 80, 46–59. [Google Scholar] [CrossRef]
- Roseman, C.A.; Argrow, B.M. Weather hazard risk quantification for sUAS safety risk management. J. Atmos. Oceanic Tech. 2020, 37, 1251. [Google Scholar] [CrossRef]
- Gianfelice, M.; Aboshosha, H. Real-time Wind Predictoins for Safe Drone Flights in Toronto. Results Eng. 2022, 15, 100534. [Google Scholar] [CrossRef]
- Hu, S.; Mayer, G. Three Dimensional Euler Solutions for Drone Delivery Trajectory Prediction under Extreme Environments. In Proceedings of the International Conference on Applied Mathematics, Modelling, and Intelligent Computing, Kunming, China, 25–27 March 2022; pp. 1–6. [Google Scholar]
- Jayaweera, H.M.P.C.; Hanoun, S. Path Planning of Unmanned Aerial Vehicles (UAVs) in Windy Environments. Drones 2022, 6, 101. [Google Scholar] [CrossRef]
- Lin, H.Y.; Peng, X.Z. Autonomous Quadrotor Navigation With Vision Based Obstacle Avoidance and Path Planning. IEEE Access 2021, 9, 102450–102459. [Google Scholar] [CrossRef]
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path planning and obstacle avoidance for AUV: A review. Ocean. Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Singh, J.; Dhuheir, M.; Refaey, A.; Erbad, A.; Mohamed, A.; Guizani, M. Navigation and Obstacle Avoidance System in Unknown Environment. In Proceedings of the IEEE Canadian Conference on Electrical and Computer Engineering, London, ON, Canada, 30 August–2 September 2020; pp. 1–4. [Google Scholar]
- Yijing, Z.; Zheng, Z.; Xiaoyi, Z.; Yang, L. Q learning algorithm based UAV path learning and obstacle avoidence approach. In Proceedings of the Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 3397–3402. [Google Scholar]
- Yan, C.; Xiang, X. A Path Planning Algorithm for UAV Based on Improved Q-Learning. In Proceedings of the International Conference on Robotics and Automation Sciences, Wuhan, China, 23–25 June 2018; pp. 1–5. [Google Scholar]
- Hou, X.; Liu, F.; Wang, R.; Yu, Y. A UAV Dynamic Path Planning Algorithm. In Proceedings of the Youth Academic Annual Conference of Chinese Association of Automation, Zhanjiang, China, 16–18 October 2020; pp. 127–131. [Google Scholar]
- Doukhi, O.; Lee, D.J. Deep Reinforcement Learning for Autonomous Map-Less Navigation of a Flying Robot. IEEE Access 2022, 10, 82964–82976. [Google Scholar] [CrossRef]
- Wu, Y.; Low, K.H. An Adaptive Path Replanning Method for Coordinated Operations of Drone in Dynamic Urban Environments. IEEE Syst. J. 2021, 15, 4600–4611. [Google Scholar] [CrossRef]
- Canny, J.; Reif, J. New lower bound techniques for robot motion planning problems. In Proceedings of the 28th Annual Symposium on Foundations of Computer Science, Los Angeles, CA, USA, 12–14 October 1987; pp. 49–60. [Google Scholar]
- Zhang, X.Y.; Duan, H.B. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Chen, Y.; Luo, G.; Mei, Y.; Yu, J.; Su, X. UAV Path Planning Using Artificial Potential Field Method Updated by Optimal Control Theory. Int. J. Syst. Sci. 2014, 47, 1407–1420. [Google Scholar] [CrossRef]
- Kim, H.; Jeong, J.; Kim, N.; Kang, B. A Study on 3D Optimal Path Planning for Quadcopter UAV Based on D* Lite. In Proceedings of the International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 11–14 June 2019; pp. 787–793. [Google Scholar]
- Lv, Z.; Yang, L.; He, Y.; Liu, Z.; Han, Z. 3D environment modeling with height dimension reduction and path planning for UAV. In Proceedings of the International Conference on Modelling, Identification and Control, Kunming, China, 10–12 July 2017; pp. 734–739. [Google Scholar]
- Song, X.; Hu, S. 2D path planning with dubins-path-based A∗ algorithm for a fixed-wing UAV. In Proceedings of the IEEE International Conference on Control Science and Systems Engineering, Beijing, China, 17–19 August 2017; pp. 69–73. [Google Scholar]
- Souissi, O.; Benatitallah, R.; Duvivier, D.; Artiba, A.; Belanger, N.; Feyzeau, P. Path planning: A 2013 survey. In Proceedings of the International Conference on Industrial Engineering and Systems Management, Rabat, Morocco, 28–30 October 2013; pp. 1–8. [Google Scholar]
- Jung, D.; Tsiotras, P. Multiresolution on-line path planning for small unmanned aerial vehicles. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 2744–2749. [Google Scholar]
- Samaniego, F.; Sanchis, J.; García-Nieto, S.; Simarro, R. UAV motion planning and obstacle avoidance based on adaptive 3D cell decomposition: Continuous space vs discrete space. In Proceedings of the IEEE Second Ecuador Technical Chapters Meeting, Salinas, Ecuador, 16–20 October 2017; pp. 1–6. [Google Scholar]
- Chen, F.C.; Gugan, G.; Solis-Oba, R.; Haque, A. Simple and Efficient Algorithm for Drone Path Planning. In Proceedings of the International Conference on Communications, Montreal, QC, Canada, 14–18 June2021; pp. 1–6. [Google Scholar]
- Chen, X.; Chen, X. The UAV dynamic path planning algorithm research based on Voronoi diagram. In Proceedings of the Chinese Control and Decision Conference, Changsha, China, 31 May–2 June 2014; pp. 1069–1071. [Google Scholar]
- Cekmez, U.; Ozsiginan, M.; Sahingoz, O.K. Multi colony ant optimization for UAV path planning with obstacle avoidance. In Proceedings of the International Conference on Unmanned Aircraft Systems, Arlington, VA, USA, 7–10 June 2016; pp. 47–52. [Google Scholar]
- Jiang, K.; Seneviratne, L.D.; Earles, S.W.E. A Shortest Path Based Path Planning Algorithm for Nonholonomic Mobile Robots. J. Intell. Robot Syst. 1999, 24, 347–366. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Arimoto, S. Path Planning Using a Tangent Graph for Mobile Robots Among Polygonal and Curved Obstacles: Communication. Int. J. Rob. Res. 1992, 11, 376–382. [Google Scholar] [CrossRef]
- Ahmad, Z.; Ullah, F.; Tran, C.; Lee, S. Efficient Energy Flight Path Planning Algorithm Using 3-D Visibility Roadmap for Small Unmanned Aerial Vehicle. Int. J. Aerosp. Eng. 2017, 2017, 2849745. [Google Scholar] [CrossRef] [Green Version]
- Frontera, G.; Martín, D.J.; Besada, J.A.; Gu, D. Approximate 3D Euclidean Shortest Paths for Unmanned Aircraft in Urban Environments. J. Intell. Robot Syst. 2017, 85, 353–368. [Google Scholar] [CrossRef]
- Majeed, A.; Lee, S. A Fast Global Flight Path Planning Algorithm Based on Space Circumscription and Sparse Visibility Graph for Unmanned Aerial Vehicle. Electronics 2018, 7, 375. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Teo, R.S.H. Computationally Efficient Visibility Graph-Based Generation Of 3D Shortest Collision-Free Path Among Polyhedral Obstacles For Unmanned Aerial Vehicles. In Proceedings of the International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 11–14 June 2019; pp. 1218–1223. [Google Scholar]
- Maini, P.; Sujit, P.B. Path planning for a UAV with kinematic constraints in the presence of polygonal obstacles. In Proceedings of the International Conference on Unmanned Aircraft Systems, Arlington, VA, USA, 7–10 June 2016; pp. 62–67. [Google Scholar]
- Naazare, M.; Ramos, D.; Wildt, J.; Schulz, D. Application of Graph-based Path Planning for UAVs to Avoid Restricted Areas. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics, Würzburg, Germany, 2–4 September 2019; pp. 139–144. [Google Scholar]
- Chow, N.; Gugan, G.; Haque, A. RADR: Routing for Autonomous Drones. In Proceedings of the International Wireless Communications & Mobile Computing Conference, Tangier, Morocco, 24–28 June 2019; pp. 1445–1450. [Google Scholar]
- De Filippis, L.; Guglieri, G.; Quagliotti, F. Path Planning Strategies for UAVS in 3D Environments. J. Intell. Robot Syst. 2012, 65, 247–264. [Google Scholar] [CrossRef]
- Yin, C.; Xiao, Z.; Cao, X.; Xi, X.; Yang, P.; Wu, D. Offline and Online Search: UAV Multiobjective Path Planning Under Dynamic Urban Environment. IEEE Internet Things J. 2018, 5, 546–558. [Google Scholar] [CrossRef]
- LaValle, S.M. Rapidly-exploring random trees: A new tool for path planning; TR 98-11; Computer Science Department, Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- Qureshi, A.H.; Ayaz, Y. Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments. Rob. Auton. Syst. 2015, 68, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Reb. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Jia, Q.; Zhang, W. An Environmental Potential Field Based RRT Algorithm for UAV Path Planning. In Proceedings of the Chinese Control Conference, Wuhan, China, 25–27 July 2018; pp. 9922–9927. [Google Scholar]
- Wu, K.; Xi, T.; Wang, H. Real-time three-dimensional smooth path planning for unmanned aerial vehicles in completely unknown cluttered environments. In Proceedings of the TENCON, Penang, Malaysia, 5–8 November 2017; pp. 2017–2022. [Google Scholar]
- Lee, D.; Song, H.; Shim, D.H. Optimal path planning based on spline-RRT* for fixed-wing UAVs operating in three-dimensional environments. In Proceedings of the International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 22–25 October 2014; pp. 835–839. [Google Scholar]
- Galvez, R.L.; Faelden, G.E.U.; Maningo, J.M.; Nakano, R.C.S.; Dadios, E.P.; Bandala, A.A.; Vicerra, R.R.P.; Fernando, A.H. Obstacle avoidance algorithm for swarm of quadrotor unmanned aerial vehicle using artificial potential fields. In Proceedings of the TENCON, Penang, Malaysia, 5–8 November 2017; pp. 2307–2312. [Google Scholar]
- Chen, X.; Zhang, J. The Three-Dimension Path Planning of UAV Based on Improved Artificial Potential Field in Dynamic Environment. In Proceedings of the International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2013; pp. 144–147. [Google Scholar]
- Kok, J.; Gonzalez, L.F.; Kelson, N. FPGA Implementation of an Evolutionary Algorithm for Autonomous Unmanned Aerial Vehicle On-Board Path Planning. IEEE Trans. Evol. Comput. 2013, 17, 272–281. [Google Scholar] [CrossRef] [Green Version]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Fast Genetic Algorithm Path Planner for Fixed-Wing Military UAV Using GPU. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2105–2117. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V. A new vibrational genetic algorithm enhanced with a voronoi diagram for path planning of autonomous uav. Aerosp. Sci. Technol. 2012, 16, 47–55. [Google Scholar] [CrossRef]
- Chen, J.; Ye, F.; Jiang, T. Path planning under obstacle-avoidance constraints based on ant colony optimization algorithm. In Proceedings of the International Conference on Communication Technology, Chengdu, China, 27–30 October 2017; pp. 1434–1438. [Google Scholar]
- Al-Sabban, W.H.; Gonzalez, L.F.; Smith, R.N. Wind-energy based path planning for Unmanned Aerial Vehicles using Markov Decision Processes. In Proceedings of the International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 784–789. [Google Scholar]
- Zhang, D.; Xian, Y.; Li, J.; Lei, G.; Chang, Y. UAV Path Planning Based on Chaos Ant Colony Algorithm. In Proceedings of the International Conference on Computer Science and Mechanical Automation, Hangzhou, China, 23–25 October 2015; pp. 81–85. [Google Scholar]
- Liu, Y.; Zhang, X.; Guan, X.; Delahaye, D. Adaptive sensitivity decision based path planning algorithm for unmanned aerial vehicle with improved particle swarm optimization. Aerosp. Sci. Technol. 2016, 58, 92–102. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, X.; Songmin, J.; Li, X. A novel phase angle-encoded fruit fly optimization algorithm with mutation adaptation mechanism applied to UAV path planning. Appl. Soft Comput. 2018, 70, 371–388. [Google Scholar] [CrossRef]
- Zhang, X.; Jia, S.; Li, X.; Jiam, M. Design of the fruit fly optimization algorithm based path planner for UAV in 3D environments. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 6–9 August 2017; pp. 381–386. [Google Scholar]
- Chen, Y.B.; Mei, Y.S.; Yu, J.Q.; Su, X.L.; Xu, N. Three-dimensional unmanned aerial vehicle path planning using modified wolf pack search algorithm. Neurocomputing 2017, 266, 445–457. [Google Scholar]
- Lyakhov, A.O.; Oganov, A.R.; Stokes, H.T.; Zhu, Q. New developments in evolutionary structure prediction algorithm USPEX. Comput. Phys. Commun. 2013, 184, 1172–1182. [Google Scholar] [CrossRef]
- Azar, A.T.; Koubaa, A.; Ali Mohamed, N.; Ibrahim, H.A.; Ibrahim, Z.F.; Kazim, M.; Ammar, A.; Benjdira, B.; Khamis, A.M.; Hameed, I.A.; et al. Drone Deep Reinforcement Learning: A Review. Electronics 2021, 10, 999. [Google Scholar] [CrossRef]
- Bouhamed, O.; Ghazzai, H.; Besbes, H.; Massoud, Y. Autonomous UAV Navigation: A DDPG-Based Deep Reinforcement Learning Approach. In Proceedings of the IEEE International Symposium on Circuits and Systems, Seville, Spain, 10–21 October 2020; pp. 1–5. [Google Scholar]
- Luis, C.E.; Schoellig, A.P. Trajectory generation for multiagent point-to-point transitions via distributed model predictive control. IEEE Robot. Autom. Lett. 2019, 4, 375–382. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Liang, C. Energy-aware Trajectory Planning Model for Mission-oriented Drone Networks. In Proceedings of the IEEE International Systems Conference, Vancouver, BC, Canada, 15 April–15 May 2021; pp. 1–7. [Google Scholar]
- Grafe, A.; Eickhoff, J.; Trimpe, S. Event-triggered and distributed model predictive control for guaranteed collision avoidace in UAV swarms. IFAC Conf. Netw. Syst. 2022, 55, 79. [Google Scholar]
- Vinokursky, D.L.; Mezentseva, O.S.; Samoylov, P.V.; Ganshin, K.Y.; Baklanova, O.A. Model predictive control for path planning of UAV group. IOP Conf. Ser. Mater. Sci. 2021, 1155, 012092. [Google Scholar] [CrossRef]
- Wu, Y.; Low, K.H.; Pang, B.; Tan, Q. Swarm-Based 4D Path Planning For Drone Operations in Urban Environments. IEEE Trans. Veh. Technol. 2021, 70, 7464–7479. [Google Scholar] [CrossRef]
- Liu, G.; Shu, C.; Liang, Z.; Peng, B.; Cheng, L. A Modified Sparrow Search Algorithm with Application in 3d Route Planning for UAV. Sensors 2021, 21, 1224. [Google Scholar] [CrossRef]
- Penicka, R.; Meng, G.; Xu, Y.; Luo, H. A geometrical path planning method for unmanned aerial vehicle in 2D/3D complex environment. Intell. Serv. Robot. 2018, 11, 301–312. [Google Scholar]
- Tu, G.T.; Juang, J.G. Path Planning and Obstacle Avoidance Based on Reinforcement Learning for UAV Application. In Proceedings of the International Conference on System Science and Engineering, Ho Chi Minh City, Vietnam, 26–28 August 2021; pp. 352–355. [Google Scholar]
- Chen, Y.; Yu, J.; Mei, Y.; Wang, Y.; Su, X. Modified central force optimization (MCFO) algorithm for 3D UAV path planning. Neurocomputing 2016, 171, 878–888. [Google Scholar] [CrossRef]
- Dolicanin, E.; Fetahovic, I.; Tuba, E.; Capor-Hrosik, R.; Tuba, M. Unmanned Combat Aerial Vehicle Path Planning by Brain Storm Optimization Algorithm. Stud. Inform. Control 2018, 27, 15–24. [Google Scholar] [CrossRef]
- Penicka, R.; Scaramuzza, D. Minimum-Time Quadrotor Waypoint Flight in Cluttered Environments. IEEE Robot. Autom. Lett. 2022, 7, 5719–5726. [Google Scholar] [CrossRef]
- Pötter Neto, C.A.; de Carvalho Bertoli, G.; Saotome, O. 2D and 3D A* Algorithm Comparison for UAS Traffic Management Systems. In Proceedings of the International Conference on Unmanned Aircraft Systems, Athens, Greece, 9–12 June 2020; pp. 72–76. [Google Scholar]
- Alyassi, R.; Khonji, M.; Karapetyan, A.; Chau, S.C.K.; Elbassioni, K.; Tseng, C.M. Autonomous Recharging and Flight Mission Planning for Battery-Operated Autonomous Drones. IEEE Trans. Autom. Sci. Eng. 2022, 1–13. [Google Scholar] [CrossRef]
- Mechali, O.; Xu, L.; Xie, X.; Iqbal, J. Fixed-time nonlinear homogeneous sliding mode approach for robust tracking control of multirotor aircraft: Experimental validation. J. Frank. Inst. 2022, 359, 1971–2029. [Google Scholar] [CrossRef]
- Song, W.; Li, Z.; Xu, B.; Wang, S.; Meng, X. Research on Improved Control Algorithm of Quadrotor UAV based on Fuzzy PID. In Proceedings of the IEEE International Conference on Artificial Intelligence and Computer Applications, Shanghai, China, 28–30 November 2022; pp. 361–365. [Google Scholar]
- Mechali, O.; Iqbal, J.; Xie, X.; Xu, L.; Senouci, A. Robust Finite-Time Trajectory Tracking Control of Quadrotor Aircraft via Terminal Sliding Mode-Based Active Antidisturbance Approach: A PIL Experiment. Int. J. Aerosp. Eng. 2021, 2021, 5522379. [Google Scholar] [CrossRef]
- Gugan, G.; Haque, A. Towards the Development of a Robust Path Planner for Autonomous Drones. In Proceedings of the IEEE Vehicular Technology Conference, Antwerp, Belgium, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Zammit, C.; Kampen, E.J.V. Comparison between A* and RRT Algorithms for 3D UAV Path Planning. Unmanned Systems. Unmanned Syst. 2022, 10, 129–146. [Google Scholar] [CrossRef]
- Kang, J.; Xiong, Z.; Niyato, D.; Xie, S.; Kim, D.I. Securing Data Sharing from the Sky: Integrating Blockchains into Drones in 5G and Beyond. IEEE Netw. 2021, 35, 78–85. [Google Scholar] [CrossRef]
- Hassija, V.; Chamola, V.; Agrawal, A.; Goyal, A.; Luong, N.C.; Niyato, D.; Yu, F.R.; Guizani, M. Fast, Reliable, and Secure Drone Communication: A Comprehensive Survey. IEEE Commun. Surv. 2021, 23, 2802–2832. [Google Scholar] [CrossRef]
- Challita, U.; Saad, W.; Bettstetter, C. Deep Reinforcement Learning for Interference-Aware Path Planning of Cellular-Connected UAVs. In Proceedings of the IEEE International Conference on Communications, Kansas City, MO, USA, 20–24 May 2018; pp. 1–7. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | 3D | Energy Constraints | Path Optimization | Drone Type (F/R/N) | Path Planner (ON/OFF) | Obstacle Type (MV/ST) | Environment Type (S/M/L) | Computer Simulations | Practical Implementation (I/O) | Algorithm Category |
|---|---|---|---|---|---|---|---|---|---|---|
| [37] | ✓ | ✗ | ✓ | F | OFF | ST | S | ✓ | ✗ | BA |
| [47] | ✗ | ✗ | ✗ | R | OFF | ST | S | ✓ | ✗ | BA |
| [71] | ✗ | ✗ | ✗ | N | OFF | ST | S | ✓ | ✗ | BA |
| [69] | ✓ | ✗ | ✓ | F | OFF | ST | S | ✓ | ✗ | BA |
| [73] | ✗ | ✗ | ✓ | N | OFF | ST | S | ✓ | ✗ | BA |
| [74] | ✓ | ✗ | ✗ | N | OFF | ST | S | ✓ | ✗ | BA |
| [70] | ✓ | ✗ | ✓ | N | OFF | ST | M | ✓ | ✗ | BA |
| [75] | ✓ | ✗ | ✓ | N | OFF | ST | S | ✓ | ✗ | BA |
| [77] | ✓ | ✗ | ✓ | R + F | OFF | ST | S | ✓ | ✗ | BA |
| [76] | ✓ | ✗ | ✓ | N | OFF | ST | S | ✓ | ✗ | BA |
| [84] | ✓ | ✗ | ✓ | N | OFF | ST | M | ✓ | ✗ | BA |
| [85] | ✓ | ✗ | ✓ | N | OFF | ST | S | ✓ | ✗ | BA |
| [40] | ✓ | ✗ | ✗ | R | ON | ST/MV | M | ✓ | ✗ | GS |
| [57] | ✓ | ✗ | ✗ | N | OFF | ST | S | ✓ | ✗ | GS |
| [58] | ✗ | ✗ | ✓ | R | ON | ST/MV | S | ✓ | ✗ | GS |
| [86] | ✓ | ✗ | ✓ | N | OFF | ST | S | ✓ | ✗ | GS |
| [31] | ✗ | ✗ | ✗ | F | ON | ST | S | ✓ | ✗ | LA |
| [32] | ✗ | ✗ | ✗ | N | ON | ST | S | ✓ | ✗ | LA |
| [33] | ✗ | ✗ | ✗ | N | ON | ST/MV | S | ✓ | ✗ | LA |
| [34] | ✓ | ✗ | ✗ | R | ON | ST | S | ✓ | O | LA |
| [87] | ✓ | ✗ | ✗ | R | ON | ST | S | ✓ | ✗ | LA |
| [79] | ✓ | ✗ | ✗ | R | ON | ST | S | ✓ | ✗ | LA |
| [72] | ✗ | ✓ | ✓ | F | ON | ST | S | ✓ | ✗ | OT |
| [88] | ✓ | ✗ | ✓ | R | OFF | ST | S | ✓ | ✗ | OT |
| [89] | ✗ | ✗ | ✗ | F | OFF | ST | S | ✓ | ✗ | OT |
| [38] | ✓ | ✓ | ✗ | R | OFF | ST | S | ✓ | ✗ | PF |
| [66] | ✓ | ✗ | ✗ | R | OFF | ST | S | ✓ | O | PF |
| [8] | ✓ | ✗ | ✓ | R | ON | ST/MV | S | ✓ | I | SBA |
| [9] | ✓ | ✗ | ✓ | R | ON | ST | M | ✓ | ✗ | SBA |
| [10] | ✓ | ✗ | ✓ | R | ON | MV | S | ✓ | I | SBA |
| [64] | ✓ | ✗ | ✓ | F | OFF | ST | S | ✓ | ✗ | SBA |
| [63] | ✓ | ✗ | ✓ | N | ON | ST | M | ✓ | ✗ | SBA |
| [62] | ✗ | ✗ | ✗ | N | OFF | ST | M | ✓ | ✗ | SBA |
| [35] | ✓ | ✗ | ✓ | N | ON | ST/MV | M | ✓ | ✗ | SBA |
| [90] | ✓ | ✗ | ✓ | R | OFF | ST | M | ✓ | I | SBA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gugan, G.; Haque, A. Path Planning for Autonomous Drones: Challenges and Future Directions. Drones 2023, 7, 169. https://doi.org/10.3390/drones7030169
Gugan G, Haque A. Path Planning for Autonomous Drones: Challenges and Future Directions. Drones. 2023; 7(3):169. https://doi.org/10.3390/drones7030169
Chicago/Turabian StyleGugan, Gopi, and Anwar Haque. 2023. "Path Planning for Autonomous Drones: Challenges and Future Directions" Drones 7, no. 3: 169. https://doi.org/10.3390/drones7030169
APA StyleGugan, G., & Haque, A. (2023). Path Planning for Autonomous Drones: Challenges and Future Directions. Drones, 7(3), 169. https://doi.org/10.3390/drones7030169