
Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection




Abstract
:1. Introduction
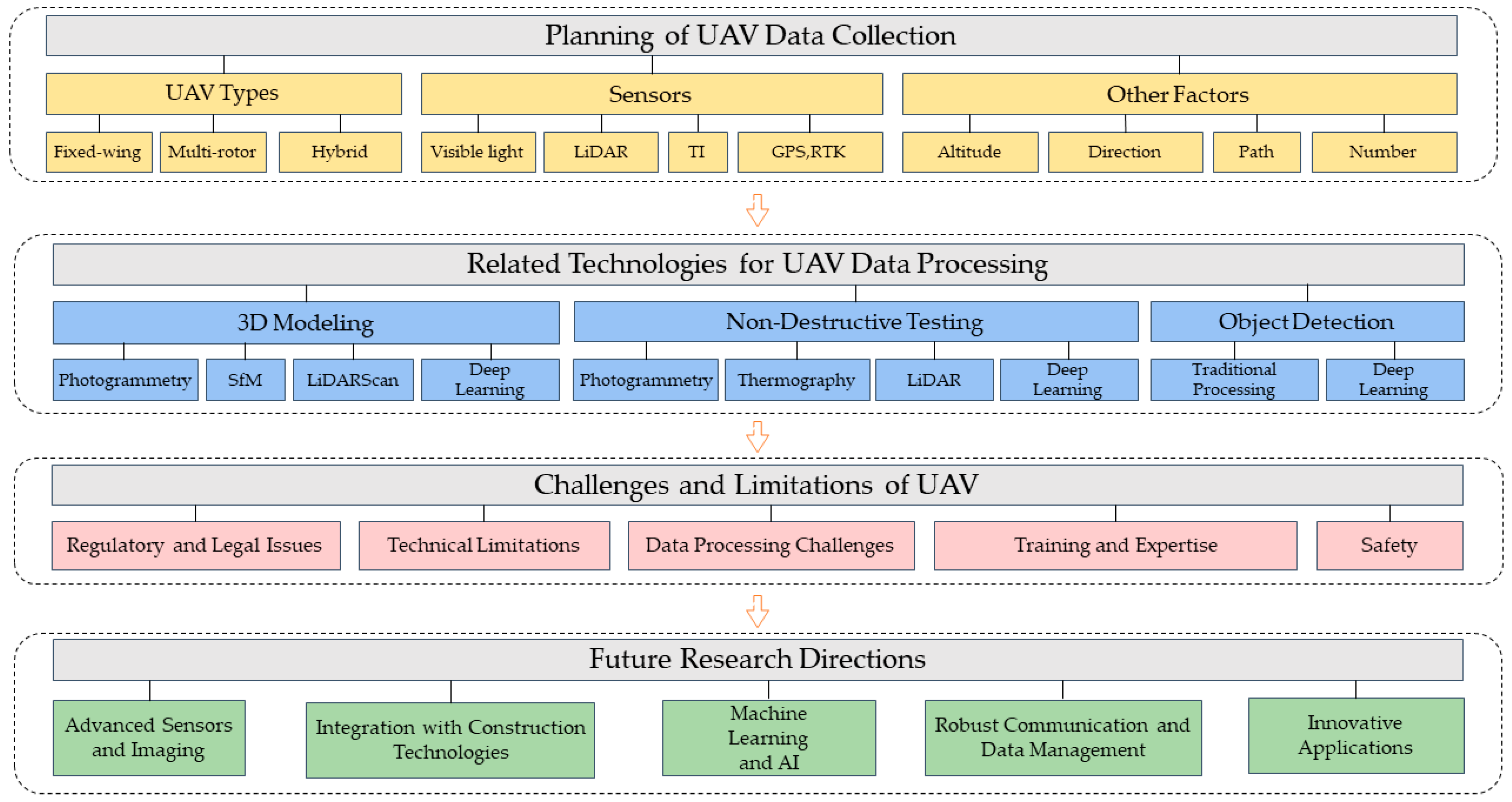
2. UAV Planning in the Construction Industry
2.1. Types of UAVs Used in the Construction Industry
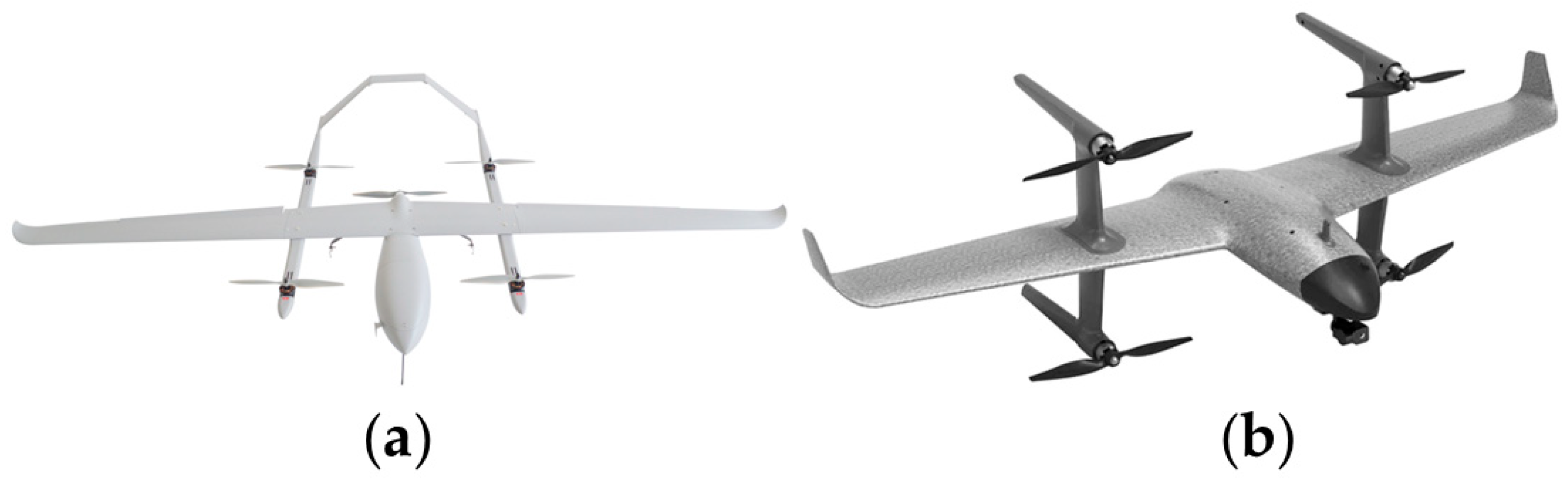
2.1.1. Fixed-Wing UAVs
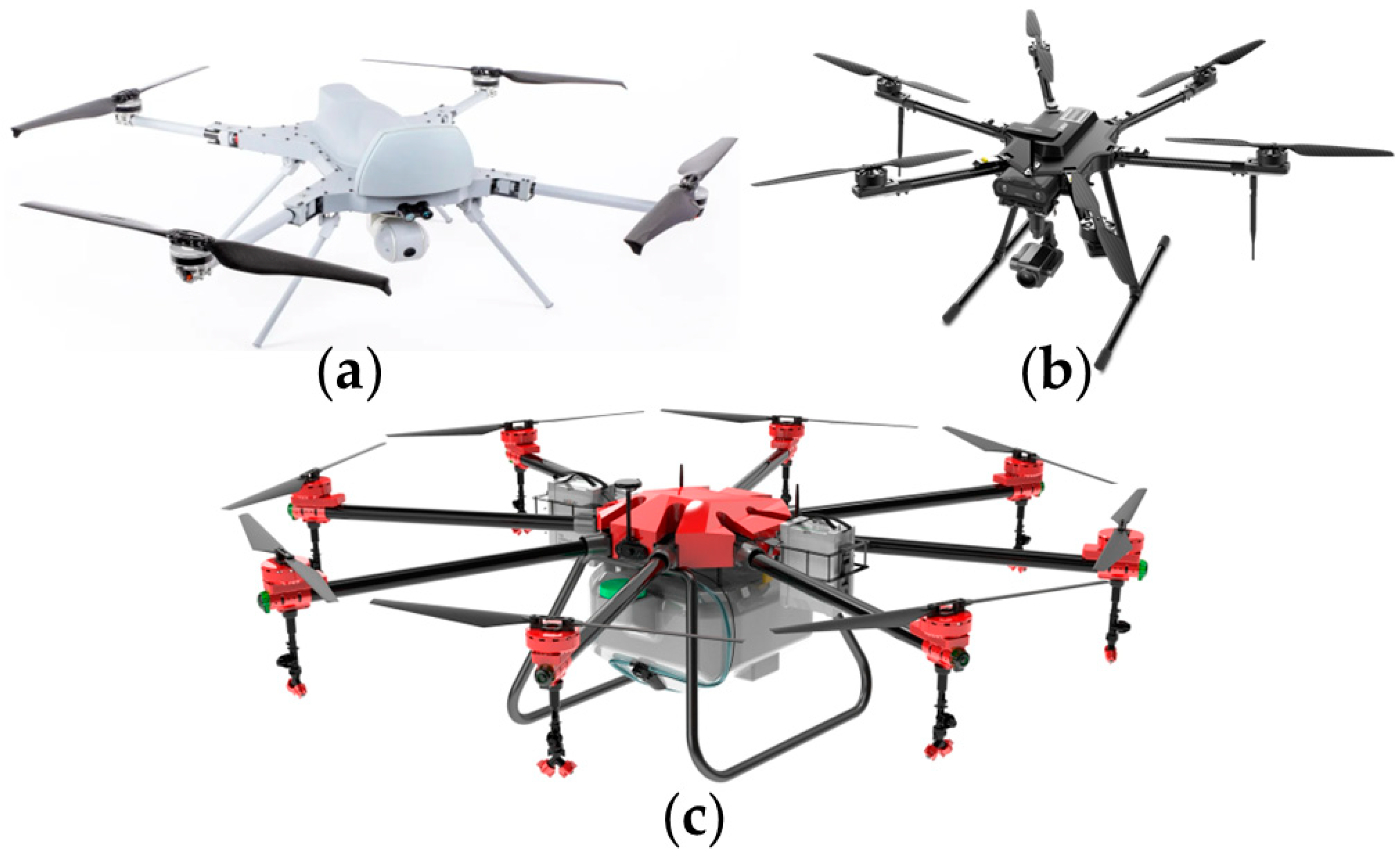
2.1.2. Multi-Rotor UAVs
2.1.3. Hybrid UAVs
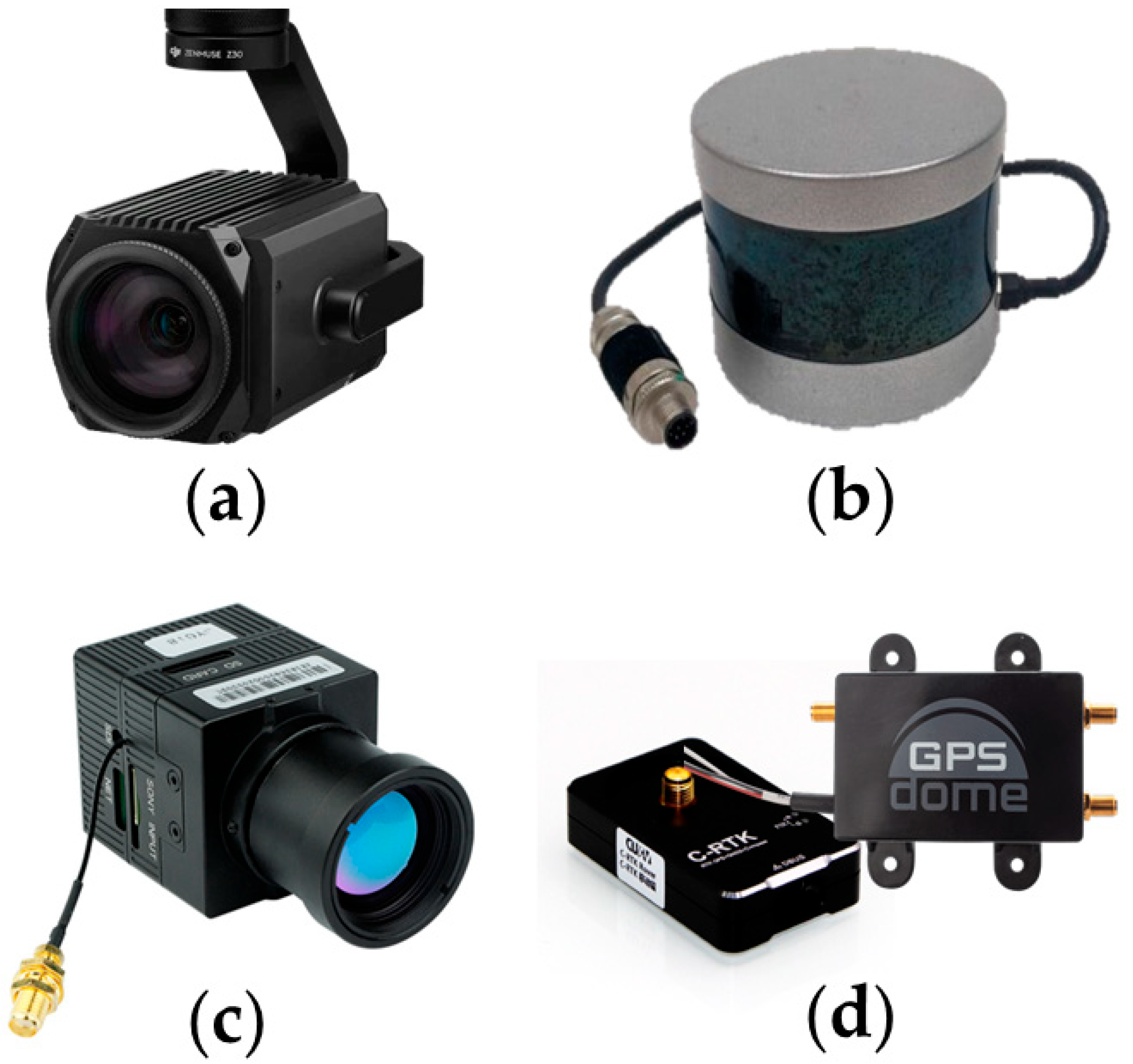
2.2. UAVs Equipped with Sensors Used in the Construction Industry
2.2.1. Visible Light Sensors
2.2.2. LiDAR Sensors
2.2.3. TI Sensors
2.2.4. GPS and RTK Sensors
2.3. Other Factors of UAVs Used in the Construction Industry
3. UAV-Based Related Technologies in the Construction Industry
3.1. Related Technologies for UAV-Based 3D Modeling in the Construction Industry
3.2. Related Technologies for UAV-Based Non-Destructive Testing (NDT) in the Construction Industry
3.3. Related Technologies for UAV-Based Object Detection in the Construction Industry
4. Challenges and Limitations
4.1. Regulatory and Legal Issues
4.2. Technical Limitations
4.3. Data Processing Challenges
4.4. Training and Expertise
4.5. Safety
5. Future Research Directions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| UAVs | Unmanned Aerial Vehicles |
| VTOL | Vertical Takeoff and Landing |
| LiDAR | Light Detection and Ranging |
| GPS | Global Positioning System |
| RTK | Real-Time Kinematic |
| RGB | Red-Green-Blue |
| FOV | Field Of View |
| NDT | Non-Destructive Testing |
| SfM | Structure from Motion |
| CNNs | Convolutional Neural Networks |
| GANs | Generative Adversarial Networks |
| RNNs | Recurrent Neural Networks |
| BIM | Building Information Modeling |
| SVMs | Support Vector Machines |
| HOG | Histogram of Oriented Gradients |
| V-J | Viola–Jones |
| SIFT | Scale Invariant Feature Transform |
| ISM | Implicit Shape Model |
| RPN | Region Proposal Network |
| IPO | Intersected Proportion of Objects |
| AP | Average Precision |
| mAP | mean Average Precision |
| SSH | Single Stage Headless |
| EASA | European Aviation Safety Agency |
| AI | Artificial Intelligence |
References
- Nikmehr, B.; Hosseini, M.R.; Martek, I.; Zavadskas, E.K.; Antucheviciene, J. Digitalization as a strategic means of achieving sustainable efficiencies in construction management: A critical review. Sustainability 2021, 13, 5040. [Google Scholar] [CrossRef]
- Outay, F.; Mengash, H.A.; Adnan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transp. Res. Part A Policy Pract. 2020, 141, 116–129. [Google Scholar] [CrossRef] [PubMed]
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in civil infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Cai, G.; Lum, K.-Y.; Chen, B.M.; Lee, T.H. A brief overview on miniature fixed-wing unmanned aerial vehicles. In Proceedings of the IEEE ICCA 2010, Xiamen, China, 9–11 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 285–290. [Google Scholar] [CrossRef]
- Kim, H.J.; Kim, M.; Lim, H.; Park, C.; Yoon, S.; Lee, D.; Choi, H.; Oh, G.; Park, J.; Kim, Y. Fully autonomous vision-based net-recovery landing system for a fixed-wing UAV. IEEE/ASME Trans. Mechatron. 2013, 18, 1320–1333. [Google Scholar] [CrossRef]
- Yang, H.; Lee, Y.; Jeon, S.Y.; Lee, D. Multi-rotor drone tutorial: Systems, mechanics, control and state estimation. Intell. Serv. Robot. 2017, 10, 79–93. [Google Scholar] [CrossRef]
- Wen, M.C.; Kang, S.C. Augmented reality and unmanned aerial vehicle assist in construction management. In Proceedings of the Computing in Civil and Building Engineering, Orlando, FL, USA, 23–25 June 2014; pp. 1570–1577. [Google Scholar]
- Chen, S.; FLaefer, D.; Mangina, E. State of technology review of civilian UAVs. Recent Pat. Eng. 2016, 10, 160–174. [Google Scholar] [CrossRef] [Green Version]
- Czyba, R.; Lemanowicz, M.; Gorol, Z.; Kudala, T. Construction prototyping, flight dynamics modeling, and aerodynamic analysis of hybrid VTOL unmanned aircraft. J. Adv. Transp. 2018, 2018, 7040531. [Google Scholar] [CrossRef]
- Hegde, N.T.; George, V.I.; Nayak, C.G.; Kumar, K. Design, dynamic modelling and control of tilt-rotor UAVs: A review. Int. J. Intell. Unmanned Syst. 2019, 8, 143–161. [Google Scholar] [CrossRef]
- Rothhaar, P.M.; Murphy, P.C.; Bacon, B.J.; Gregory, I.M.; Grauer, J.A.; Busan, R.C.; Croom, M.A. NASA Langley distributed propulsion VTOL tiltwing aircraft testing, modeling, simulation, control, and flight test development. In Proceedings of the 14th AIAA Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 16–20 June 2014; p. 2999. [Google Scholar]
- Kamal, A.; Ramirez-Serrano, A. Conceptual design of a highly-maneuverable transitional VTOL UAV with new maneuver and control capabilities. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1733. [Google Scholar]
- Saeed, A.S.; Younes, A.B.; Cai, C.; Cai, G. A survey of hybrid unmanned aerial vehicles. Prog. Aerosp. Sci. 2018, 98, 91–105. [Google Scholar] [CrossRef]
- Wilson, A.N.; Kumar, A.; Jha, A.; Cenkeramaddi, L.R. Embedded Sensors, Communication Technologies, Computing Platforms and Machine Learning for UAVs: A Review. IEEE Sens. J. 2021, 22, 1807–1826. [Google Scholar] [CrossRef]
- Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef] [Green Version]
- Omar, T.; Nehdi, M.L. Remote sensing of concrete bridge decks using unmanned aerial vehicle infrared thermography. Autom. Constr. 2017, 83, 360–371. [Google Scholar] [CrossRef]
- Motawa, I.; Kardakou, A. Unmanned aerial vehicles (UAVs) for inspection in construction and building industry. In Proceedings of the the 16th International Operation and Maintenance Conference, Cairo, Egypt, 18–20 November 2018. [Google Scholar]
- Ham, Y.; Han, K.K.; Lin, J.J.; Golparvar-Fard, M. Visual monitoring of civil infrastructure systems via camera-equipped Unmanned Aerial Vehicles (UAVs): A review of related works. Vis. Eng. 2016, 4, 1. [Google Scholar] [CrossRef] [Green Version]
- Boonpook, W.; Tan, Y.; Xu, B. Deep learning-based multi-feature semantic segmentation in building extraction from images of UAV photogrammetry. Int. J. Remote Sens. 2021, 42, 1–19. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Teng, F.; Lin, Y.; Wang, M.; Cai, H. Improved mask R-CNN for rural building roof type recognition from uav high-resolution images: A case study in hunan province, China. Remote Sens. 2022, 14, 265. [Google Scholar] [CrossRef]
- Kestur, R.; Farooq, S.; Abdal, R.; Mehraj, E.; Narasipura, O.S.; Mudigere, M. UFCN: A fully convolutional neural network for road extraction in RGB imagery acquired by remote sensing from an unmanned aerial vehicle. J. Appl. Remote Sens. 2018, 12, 016020. [Google Scholar] [CrossRef]
- Varia, N.; Dokania, A.; Senthilnath, J. DeepExt: A convolution neural network for road extraction using RGB images captured by UAV. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence (SSCI), Bangalore, India, 18–21 November 2018; pp. 1890–1895. [Google Scholar]
- Senthilnath, J.; Varia, N.; Dokania, A.; Anand, G.; Benediktsson, J.A. Deep TEC: Deep transfer learning with ensemble classifier for road extraction from UAV imagery. Remote Sens. 2020, 12, 245. [Google Scholar] [CrossRef] [Green Version]
- Feng, Q.; Liu, J.; Gong, J. UAV remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef] [Green Version]
- Senthilnath, J.; Kandukuri, M.; Dokania, A.; Ramesh, K.N. Application of UAV imaging platform for vegetation analysis based on spectral-spatial methods. Comput. Electron. Agric. 2017, 140, 8–24. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Hruška, J.; Adão, T.; Peres, E.; Morais, R.; Sousa, J.J. Multi-temporal vineyard monitoring through UAV-based RGB imagery. Remote Sens. 2018, 10, 1907. [Google Scholar] [CrossRef] [Green Version]
- Ocer, N.E.; Kaplan, G.; Erdem, F.; Kucuk Matci, D.; Avdan, U. Tree extraction from multi-scale UAV images using Mask R-CNN with FPN. Remote Sens. Lett. 2020, 11, 847–856. [Google Scholar] [CrossRef]
- Adade, R.; Aibinu, A.M.; Ekumah, B.; Asaana, J. Unmanned Aerial Vehicle (UAV) applications in coastal zone management—A review. Environ. Monit. Assess. 2021, 193, 154. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Song, Y.; Kil, S.H. Feasibility analyses of real-time detection of wildlife using UAV-derived thermal and rgb images. Remote Sens. 2021, 13, 2169. [Google Scholar] [CrossRef]
- Moon, D.; Chung, S.; Kwon, S.; Seo, J.; Shin, J. Comparison and utilization of point cloud generated from photogrammetry and laser scanning: 3D world model for smart heavy equipment planning. Autom. Constr. 2019, 98, 322–331. [Google Scholar] [CrossRef]
- Room, M.H.M.; Anuar, A. Integration of Lidar system, mobile laser scanning (MLS) and unmanned aerial vehicle system for generation of 3d building model application: A review. In Proceedings of the IOP Conference Series: Earth and Environmental Science, 11th IGRSM International Conference and Exhibition on Geospatial & Remote Sensing, Kuala Lumpur, Malaysia, 8–9 March 2022; Volume 1064, p. 012042. [Google Scholar]
- Kwon, S.; Park, J.W.; Moon, D.; Jung, S.; Park, H. Smart merging method for hybrid point cloud data using UAV and LIDAR in earthwork construction. Procedia Eng. 2017, 196, 21–28. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, W.; Huang, R.; Dong, Z.; Chen, C.; Jiang, L.; Wang, H. 3D model-based terrestrial laser scanning (TLS) observation network planning for large-scale building facades. Autom. Constr. 2022, 144, 104594. [Google Scholar] [CrossRef]
- Park, J.K.; Lee, K.W. Efficiency Analysis of Construction Automation Using 3D Geospatial Information. Sens. Mater 2022, 34, 415–425. [Google Scholar] [CrossRef]
- Room, M.H.M.; Ahmad, A. Fusion of Uav-Based LIDAR and Mobile Laser Scanning Data for Construction of 3d Building Model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 48, 297–302. [Google Scholar] [CrossRef]
- Miethig, B.; Liu, A.; Habibi, S.; Mohrenschildt, M.V. Leveraging thermal imaging for autonomous driving. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–5. [Google Scholar]
- Costello, J.; Stewart, I.B.; Donnelly, A.E.; Selfe, J.; Karki, A.I. Use of thermal imaging in sports medicine research: A short report: Short article. Int. Sport. J. 2013, 14, 94–98. [Google Scholar]
- Ottaviani, M.; Giammichele, L.; Fioretti, F.; Ricci, R. Thermal and visual remote sensing of residential buildings by UAV. In Proceedings of the IOP Conference Series: Earth and Environmental Science, 7th AIGE/IIETA International Conference and 16th AIGE Conference on: Energy Conversion, Management, Recovery, Saving, Storage and Renewable Systems (AIGE 2022), Parma, Italy, 8–9 June 2022; Volume 1106, p. 012019. [Google Scholar]
- Borrmann, D.; Elseberg, J.; Nüchter, A. Thermal 3D mapping of building façades. In Intelligent Autonomous Systems 12: Volume 1, Proceedings of the 12th International Conference IAS-12, Jeju Island, Republic of Korea, 26–29 June 2012; Springer: Berlin/Heidelberg, Germany, 2013; pp. 173–182. [Google Scholar]
- Amon, F.; Pearson, C. Thermal imaging in firefighting and thermography applications. Radiom. Temp. Meas. II. Appl. 2009, 43, 279–331. [Google Scholar]
- Kylili, A.; Fokaides, P.A.; Christou, P.; Kalogirou, S.A. Infrared thermography (IRT) applications for building diagnostics: A review. Appl. Energy 2014, 134, 531–549. [Google Scholar] [CrossRef]
- Mahmoodzadeh, M.; Gretka, V.; Wong, S.; Froese, T.; Mukhopadhyaya, P. Evaluating patterns of building envelope air leakage with infrared thermography. Energies 2020, 13, 3545. [Google Scholar] [CrossRef]
- Taylor, T.; Counsell, J.; Gill, S. Energy efficiency is more than skin deep: Improving construction quality control in new-build housing using thermography. Energy Build. 2013, 66, 222–231. [Google Scholar] [CrossRef]
- Lucchi, E. Applications of the infrared thermography in the energy audit of buildings: A review. Renew. Sustain. Energy Rev. 2018, 82, 3077–3090. [Google Scholar] [CrossRef]
- Lerma, J.L.; Cabrelles, M.; Portales, C. Multitemporal thermal analysis to detect moisture on a building façade. Constr. Build. Mater. 2011, 25, 2190–2197. [Google Scholar] [CrossRef]
- Abdel-Qader, I.; Yohali, S.; Abudayyeh, O.; Yehia, S. Segmentation of thermal images for non-destructive evaluation of bridge decks. Ndt E Int. 2008, 41, 395–405. [Google Scholar] [CrossRef]
- Warsi, Z.H.; Irshad, S.M.; Khan, F.; Shahbaz, M.A.; Junaid, M.; Amin, S.U. Sensors for structural health monitoring: A review. In Proceedings of the 2019 Second International Conference on Latest Trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 13–14 November 2019; pp. 1–6. [Google Scholar]
- Zhang, R.; Li, H.; Duan, K.; You, S.; Liu, K.; Wang, F.; Hu, Y. Automatic detection of earthquake-damaged buildings by integrating UAV oblique photography and infrared thermal imaging. Remote Sens. 2020, 12, 2621. [Google Scholar] [CrossRef]
- Alam, M.S.; Bognar, J.G.; Hardie, R.C.; Yasuda, B.J. Infrared image registration and high-resolution reconstruction using multiple translationally shifted aliased video frames. IEEE Trans. Instrum. Meas. 2000, 49, 915–923. [Google Scholar] [CrossRef] [Green Version]
- Goss, T.M.; Barnard, P.W.; Fildis, H.; Erbudak, M.; Senger, T.; Alpman, M.E. Field of view selection for optimal airborne imaging sensor performance. In Proceedings of the Infrared Imaging Systems: Design, Analysis, Modeling, and Testing XXV, Baltimore, MA, USA, 6–8 May 2014; Volume 9071, pp. 9–18. [Google Scholar]
- O’Shaughnessy, S.A.; Hebel, M.A.; Evett, S.R.; Colaizzi, P.D. Evaluation of a wireless infrared thermometer with a narrow field of view. Comput. Electron. Agric. 2011, 76, 59–68. [Google Scholar] [CrossRef] [Green Version]
- Videras Rodríguez, M.; Melgar, S.G.; Cordero, A.S.; Márquez, J.M.A. A critical review of unmanned aerial vehicles (Uavs) use in architecture and urbanism: Scientometric and bibliometric analysis. Appl. Sci. 2021, 11, 9966. [Google Scholar] [CrossRef]
- Abdelfatah, R.; Moawad, A.; Alshaer, N.; Ismail, T. UAV tracking system using integrated sensor fusion with RTK-GPS. In Proceedings of the 2021 International Mobile, Intelligent, and Ubiquitous Computing Conference (MIUCC), Cairo, Egypt, 26–27 May 2021; pp. 352–356. [Google Scholar]
- Eling, C.; Klingbeil, L.; Kuhlmann, H. Real-time single-frequency GPS/MEMS-IMU attitude determination of lightweight UAVs. Sensors 2015, 15, 26212–26235. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, J.C.; Lin, C.J.; You, B.Y.; Yan, Y.L.; Cheng, T.H. Rtlio: Real-time lidar-inertial odometry and mapping for UAVS. Sensors 2021, 21, 3955. [Google Scholar] [CrossRef] [PubMed]
- Zimmermann, F.; Eling, C.; Klingbeil, L.; Kuhlmann, H. Precise Positioning of Uavs-Dealing with Challenging Rtk-Gps Measurement Conditions during Automated Uav Flights. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 95–102. [Google Scholar] [CrossRef] [Green Version]
- Jacob-Loyola, N.; Muñoz-La Rivera, F.; Herrera, R.F.; Atencio, E. Unmanned aerial vehicles (UAVs) for physical progress monitoring of construction. Sensors 2021, 21, 4227. [Google Scholar] [CrossRef]
- Czyża, S.; Szuniewicz, K.; Kowalczyk, K.; Dumalski, A.; Ogrodniczak, M.; Zieleniewicz, Ł. Assessment of Accuracy in Unmanned Aerial Vehicle (UAV) Pose Estimation with the REAL-Time Kinematic (RTK) Method on the Example of DJI Matrice 300 RTK. Sensors 2023, 23, 2092. [Google Scholar] [CrossRef]
- Song, C.; Chen, Z.; Wang, K.; Luo, H.; Cheng, J.C. BIM-supported scan and flight planning for fully autonomous LiDAR-carrying UAVs. Autom. Constr. 2022, 142, 104533. [Google Scholar] [CrossRef]
- Zhai, W.; Han, B.; Li, D.; Duan, J.; Cheng, C. A low-altitude public air route network for UAV management constructed by global subdivision grids. PLoS ONE 2021, 16, e0249680. [Google Scholar] [CrossRef]
- Bouras, A.; Bouzid, Y.; Guiatni, M. Multi-uavs coverage path planning. In Proceedings of the 4th International Conference on Electrical Engineering and Control Applications: ICEECA 2019, Constantine, Algeria, 17–19 December 2019; pp. 23–36. [Google Scholar]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Shi, J.; Tan, L.; Lian, X.; Xu, T.; Zhang, H.; Zhang, Y. A multi-unmanned aerial vehicle dynamic task assignment method based on bionic algorithms. Comput. Electr. Eng. 2022, 99, 107820. [Google Scholar] [CrossRef]
- Barba, S.; Barbarella, M.; Di Benedetto, A.; Fiani, M.; Gujski, L.; Limongiello, M. Accuracy assessment of 3D photogrammetric models from an unmanned aerial vehicle. Drones 2019, 3, 79. [Google Scholar] [CrossRef] [Green Version]
- Deliry, S.I.; Avdan, U. Accuracy of unmanned aerial systems photogrammetry and structure from motion in surveying and mapping: A review. J. Indian Soc. Remote Sens. 2021, 49, 1997–2017. [Google Scholar] [CrossRef]
- Nooralishahi, P.; Ibarra-Castanedo, C.; Deane, S.; López, F.; Pant, S.; Genest, M.; Avdelidis, N.P.; Maldague, X.P. Drone-based non-destructive inspection of industrial sites: A review and case studies. Drones 2021, 5, 106. [Google Scholar] [CrossRef]
- Oliensis, J. A critique of structure-from-motion algorithms. Comput. Vis. Image Underst. 2000, 80, 172–214. [Google Scholar] [CrossRef] [Green Version]
- Bianco, S.; Ciocca, G.; Marelli, D. Evaluating the performance of structure from motion pipelines. J. Imaging 2018, 4, 98. [Google Scholar] [CrossRef] [Green Version]
- Shalaby, A.; Elmogy, M.; El-Fetouh, A.A. Algorithms and applications of structure from motion (SFM): A survey. Algorithms 2017, 6. [Google Scholar] [CrossRef]
- El-Omari, S.; Moselhi, O. Integrating 3D laser scanning and photogrammetry for progress measurement of construction work. Autom. Constr. 2008, 18, 1–9. [Google Scholar] [CrossRef]
- Lo, Y.; Zhang, C.; Ye, Z.; Cui, C. Monitoring road base course construction progress by photogrammetry-based 3D reconstruction. Int. J. Constr. Manag. 2022, 1–15. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- Zaremba, W.; Sutskever, I.; Vinyals, O. Recurrent neural network regularization. arXiv 2014, arXiv:1409.2329. [Google Scholar]
- Parusheva, S. Digitalization and Digital Transformation in Construction-Benefits and Challenges. Inf. Commun. Technol. Bus. Educ. 2019, 126–134. [Google Scholar]
- Jiang, Y.; Han, S.; Bai, Y. Building and infrastructure defect detection and visualization using drone and deep learning technologies. J. Perform. Constr. Facil. 2021, 35, 04021092. [Google Scholar] [CrossRef]
- Kalfarisi, R.; Wu, Z.Y.; Soh, K. Crack detection and segmentation using deep learning with 3D reality mesh model for quantitative assessment and integrated visualization. J. Comput. Civ. Eng. 2020, 34, 04020010. [Google Scholar] [CrossRef]
- Kung, R.Y.; Pan, N.H.; Wang, C.C.; Lee, P.C. Application of deep learning and unmanned aerial vehicle on building maintenance. Adv. Civ. Eng. 2021, 2021, 5598690. [Google Scholar] [CrossRef]
- Roca, D.; Armesto, J.; Lagüela, S.; Díaz-Vilariño, L. Lidar-equipped uav for building information modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 523–527. [Google Scholar] [CrossRef] [Green Version]
- Mahajan, G. Applications of drone technology in construction industry: A study 2012–2021. Int. J. Eng. Adv. Technol. 2021, 11, 224–239. [Google Scholar] [CrossRef]
- Dahaghin, M.; Samadzadegan, F.; Dadrass Javan, F. Precise 3D extraction of building roofs by fusion of UAV-based thermal and visible images. Int. J. Remote Sens. 2021, 42, 7002–7030. [Google Scholar] [CrossRef]
- Truong-Hong, L.; Chen, S.; Cao, V.L.; Laefer, D.F. Automatic bridge deck damage using low cost UAV-based images. In Proceedings of the TU1406 Quality Specifications for Roadway Bridges Standardization at a European Level, Barcelona, Spain, 27–28 September 2018. [Google Scholar]
- Angelosanti, M.; Kulkarni, N.N.; Sabato, A. Combination of Building Information Modeling and Infrared Point Cloud for Nondestructive Evaluation. In Proceedings of the 2022 IEEE International Workshop on Metrology for Living Environment (MetroLivEn), Cosenza, Italy, 25–27 May 2022; pp. 269–273. [Google Scholar]
- Li, J.; Li, X.; Liu, K.; Yao, Z. Crack Identification for Bridge Structures Using an Unmanned Aerial Vehicle (UAV) Incorporating Image Geometric Correction. Buildings 2022, 12, 1869. [Google Scholar] [CrossRef]
- Zhou, R.; Wen, Z.; Su, H. Automatic recognition of earth rock embankment leakage based on UAV passive infrared thermography and deep learning. ISPRS J. Photogramm. Remote Sens. 2022, 191, 85–104. [Google Scholar] [CrossRef]
- Wang, Z.F.; Yu, Y.F.; Wang, J.; Zhang, J.Q.; Zhu, H.L.; Li, P.; Xu, L.; Jiang, H.-N.; Sui, Q.-M.; Jia, L.; et al. Convolutional neural-network-based automatic dam-surface seepage defect identification from thermograms collected from UAV-mounted thermal imaging camera. Constr. Build. Mater. 2022, 323, 126416. [Google Scholar] [CrossRef]
- Tan, Y.; Li, G.; Cai, R.; Ma, J.; Wang, M. Mapping and modelling defect data from UAV captured images to BIM for building external wall inspection. Autom. Constr. 2022, 139, 104284. [Google Scholar] [CrossRef]
- Akinosho, T.D.; Oyedele, L.O.; Bilal, M.; Ajayi, A.O.; Delgado, M.D.; Akinade, O.O.; Ahmed, A.A. Deep learning in the construction industry: A review of present status and future innovations. J. Build. Eng. 2020, 32, 101827. [Google Scholar] [CrossRef]
- Mostafa, K.; Hegazy, T. Review of image-based analysis and applications in construction. Autom. Constr. 2021, 122, 103516. [Google Scholar] [CrossRef]
- Yeh, C.H.; Lin, C.Y.; Muchtar, K.; Lai, H.E.; Sun, M.T. Three-pronged compensation and hysteresis thresholding for moving object detection in real-time video surveillance. IEEE Trans. Ind. Electron. 2017, 64, 4945–4955. [Google Scholar] [CrossRef]
- Ben-Musa, A.S.; Singh, S.K.; Agrawal, P. Object detection and recognition in cluttered scene using Harris Corner Detection. In Proceedings of the 2014 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kanyakumari, India, 10–11 July 2014; pp. 181–184. [Google Scholar]
- Ercan, M.F.; Wang, R.B. Deep learning for accurate corner detection in computer vision-based inspection. In Proceedings of the Computational Science and Its Applications–ICCSA 2021: 21st International Conference, Cagliari, Italy, 13–16 September 2021; Part II 21. pp. 45–54. [Google Scholar]
- Serre, T.; Wolf, L.; Poggio, T. Object recognition with features inspired by visual cortex. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 2, pp. 994–1000. [Google Scholar]
- Zhu, Z.; Brilakis, I. Concrete column recognition in images and videos. J. Comput. Civ. Eng. 2010, 24, 478–487. [Google Scholar] [CrossRef]
- Kim, H.; Kim, H. 3D reconstruction of a concrete mixer truck for training object detectors. Autom. Constr. 2018, 88, 23–30. [Google Scholar] [CrossRef]
- Xu, Y.; Yu, G.; Wang, Y.; Wu, X.; Ma, Y. A hybrid vehicle detection method based on viola-jones and HOG + SVM from UAV images. Sensors 2016, 16, 1325. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Meng, Q. Vehicle detection from UAVs by using SIFT with implicit shape model. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013; pp. 3139–3144. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23-28 June 2014; pp. 580–587. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 2778–2788. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Ding, J.; Zhang, J.; Zhan, Z.; Tang, X.; Wang, X. A Precision Efficient Method for Collapsed Building Detection in Post-Earthquake UAV Images Based on the Improved NMS Algorithm and Faster R-CNN. Remote Sens. 2022, 14, 663. [Google Scholar] [CrossRef]
- Lee, J.H.; Yoon, S.S.; Kim, I.H.; Jung, H.J. Diagnosis of crack damage on structures based on image processing techniques and R-CNN using unmanned aerial vehicle (UAV). In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2018, Denver, CO, USA, 5–8 March 2018; Volume 10598, pp. 265–272. [Google Scholar]
- Zhou, Q.; Ding, S.; Qing, G.; Hu, J. UAV vision detection method for crane surface cracks based on Faster R-CNN and image segmentation. J. Civ. Struct. Health Monit. 2022, 12, 845–855. [Google Scholar] [CrossRef]
- Sharma, S.; Susmitha, A.V.V.; Van, L.D.; Tseng, Y.C. An edge-controlled outdoor autonomous UAV for colorwise safety helmet detection and counting of workers in construction sites. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Nanjing, China, 27–30 September 2021; pp. 1–5. [Google Scholar]
- Liang, H.; Seo, S. UAV Low-Altitude Remote Sensing Inspection System Using a Small Target Detection Network for Helmet Wear Detection. Remote Sens. 2023, 15, 196. [Google Scholar] [CrossRef]
- Qiu, Z.; Bai, H.; Chen, T. Special Vehicle Detection from UAV Perspective via YOLO-GNS Based Deep Learning Network. Drones 2023, 7, 117. [Google Scholar] [CrossRef]
- Li, B.; Gan, Z.; Neretin, E.S.; Yang, Z. Object Recognition Through UAV Observations Based on Yolo and Generative Adversarial Network. In Proceedings of the IoT as a Service: 6th EAI International Conference, IoTaaS 2020, Xi’an, China, 19–20 November 2020; Proceedings 6. pp. 439–449. [Google Scholar]
- Xiao, B.; Kang, S.C. Development of an image data set of construction machines for deep learning object detection. J. Comput. Civ. Eng. 2021, 35, 05020005. [Google Scholar] [CrossRef]
- Han, Q.; Liu, X.; Xu, J. Detection and location of steel structure surface cracks based on unmanned aerial vehicle images. J. Build. Eng. 2022, 50, 104098. [Google Scholar] [CrossRef]
- Lightfoot, T.R. Bring on the Drones: Legal and Regulatory Issues in Using Unmanned Aircraft Systems. Nat. Resour. Environ. 2018, 32, 41–45. [Google Scholar]
- Bassi, E. From here to 2023: Civil drones operations and the setting of new legal rules for the European single sky. J. Intell. Robot. Syst. 2020, 100, 493–503. [Google Scholar] [CrossRef]
- Huttunen, M. Civil unmanned aircraft systems and security: The European approach. J. Transp. Secur. 2019, 12, 83–101. [Google Scholar] [CrossRef] [Green Version]
- Watkins, S.; Burry, J.; Mohamed, A.; Marino, M.; Prudden, S.; Fisher, A.; Kloet, N.; Jakobi, T.; Clothier, R. Ten questions concerning the use of drones in urban environments. Build. Environ. 2020, 167, 106458. [Google Scholar] [CrossRef]
- Vattapparamban, E.; Güvenç, I.; Yurekli, A.I.; Akkaya, K.; Uluağaç, S. Drones for smart cities: Issues in cybersecurity, privacy, and public safety. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 216–221. [Google Scholar]
- Finn, R.L.; Wright, D. Unmanned aircraft systems: Surveillance, ethics and privacy in civil applications. Comput. Law Secur. Rev. 2012, 28, 184–194. [Google Scholar] [CrossRef]
- Biczyski, M.; Sehab, R.; Whidborne, J.F.; Krebs, G.; Luk, P. Multirotor sizing methodology with flight time estimation. J. Adv. Transp. 2020, 2020, 9689604. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- York, D.D.; Al-Bayati, A.J.; Al-Shabbani, Z.Y. Potential Applications of UAV within the Construction Industry and the Challenges Limiting Implementation. In Proceedings of the Construction Research Congress 2020: Project Management and Controls, Materials, and Contracts, Tempe, AZ, USA, 8–10 March 2020; American Society of Civil Engineers: Reston, VA, USA, 2021; pp. 31–39. [Google Scholar]
- Norton, A.; Ahmadzadeh, R.; Jerath, K.; Robinette, P.; Weitzen, J.; Wickramarathne, T.; Yanco, H.; Choi, M.; Donald, R.; Donoghue., B.; et al. DECISIVE Test Methods Handbook: Test Methods for Evaluating sUAS in Subterranean and Constrained Indoor Environments, Version 1.1. arXiv 2022, arXiv:2211.01801. [Google Scholar]
- Martinez, J.G.; Gheisari, M.; Alarcón, L.F. UAV integration in current construction safety planning and monitoring processes: Case study of a high-rise building construction project in Chile. J. Manag. Eng. 2020, 36, 05020005. [Google Scholar] [CrossRef]
- Congalton, R.G. Remote sensing and geographic information system data integration: Error sources and. Photogramm. Eng. Remote Sens. 1991, 57, 677–687. [Google Scholar]
- Jeelani, I.; Gheisari, M. Safety challenges of UAV integration in construction: Conceptual analysis and future research roadmap. Saf. Sci. 2021, 144, 105473. [Google Scholar] [CrossRef]
- Rachmawati, T.S.N.; Kim, S. Unmanned Aerial Vehicles (UAV) Integration with Digital Technologies toward Construction 4.0: A Systematic Literature Review. Sustainability 2022, 14, 5708. [Google Scholar] [CrossRef]
- Subramanya, K.; Kermanshachi, S.; Patel, R.K. The Future of Highway and Bridge Construction: Digital Project Delivery Using Integrated Advanced Technologies. In Proceedings of the International Conference on Transportation and Development 2022, Seattle, WA, USA, 31 May–3 June 2022; pp. 14–25. [Google Scholar]
- McCabe, B.Y.; Hamledari, H.; Shahi, A.; Zangeneh, P.; Azar, E.R. Roles, benefits, and challenges of using UAVs for indoor smart construction applications. In Proceedings of the Computing in Civil Engineering 2017, Seattle, DC, USA, 25–27 June 2017; pp. 349–357. [Google Scholar]
- Izadi Moud, H.; Flood, I.; Zhang, X.; Abbasnejad, B.; Rahgozar, P.; McIntyre, M. Quantitative assessment of proximity risks associated with unmanned aerial vehicles in construction. J. Manag. Eng. 2021, 37, 04020095. [Google Scholar] [CrossRef]
- Irizarry, J.; Gheisari, M.; Walker, B.N. Usability assessment of drone technology as safety inspection tools. J. Inf. Technol. Constr. (ITcon) 2012, 17, 194–212. [Google Scholar]
- Mosly, I. Applications and issues of unmanned aerial systems in the construction industry. Safety 2017, 21, 31. [Google Scholar] [CrossRef] [Green Version]
- Krichen, M.; Adoni, W.Y.H.; Mihoub, A.; Alzahrani, M.Y.; Nahhal, T. Security Challenges for Drone Communications: Possible Threats, Attacks and Countermeasures. In Proceedings of the 2022 2nd International Conference of Smart Systems and Emerging Technologies (SMARTTECH), Riyadh, Saudi Arabia, 9–11 May 2022; pp. 184–189. [Google Scholar]
- Ko, Y.; Kim, J.; Duguma, D.G.; Astillo, P.V.; You, I.; Pau, G. Drone secure communication protocol for future sensitive applications in military zone. Sensors 2021, 21, 2057. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of UAV | Advantages | Disadvantages | References |
|---|---|---|---|
| Fixed-wing UAVs |
|
| Cai et al. [5] Kim et al. [6] |
| Multi-rotor UAVs |
|
| Yang et al. [7] Wen et al. [8] Chen et al. [9] |
| Hybrid UAVs |
|
| Czyba et al. [10] Saeed et al. [14] |
| Sensor Type | Advantages | Disadvantages | References |
|---|---|---|---|
| Visible light sensors |
|
| Ham et al. [19] Adade et al. [29] Lee et al. [30] |
| LiDAR sensors |
|
| Moon et al. [31] Park et al. [35] Room et al. [36] |
| TI sensors |
|
| Warsi et al. [48] Zhang et al. [49] Goss et al. [51] |
| GPS and RTK sensors |
|
| Abdelfatah et al. [54] Eling et al. [55] Yang et al. [56] Czyża et al. [59] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Lee, S.-C.; Bae, W.; Kim, J.; Seo, S. Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection. Drones 2023, 7, 202. https://doi.org/10.3390/drones7030202
Liang H, Lee S-C, Bae W, Kim J, Seo S. Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection. Drones. 2023; 7(3):202. https://doi.org/10.3390/drones7030202
Chicago/Turabian StyleLiang, Han, Seong-Cheol Lee, Woosung Bae, Jeongyun Kim, and Suyoung Seo. 2023. "Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection" Drones 7, no. 3: 202. https://doi.org/10.3390/drones7030202
APA StyleLiang, H., Lee, S.-C., Bae, W., Kim, J., & Seo, S. (2023). Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection. Drones, 7(3), 202. https://doi.org/10.3390/drones7030202