
Robust Control for UAV Close Formation Using LADRC via Sine-Powered Pigeon-Inspired Optimization


Abstract
:1. Introduction
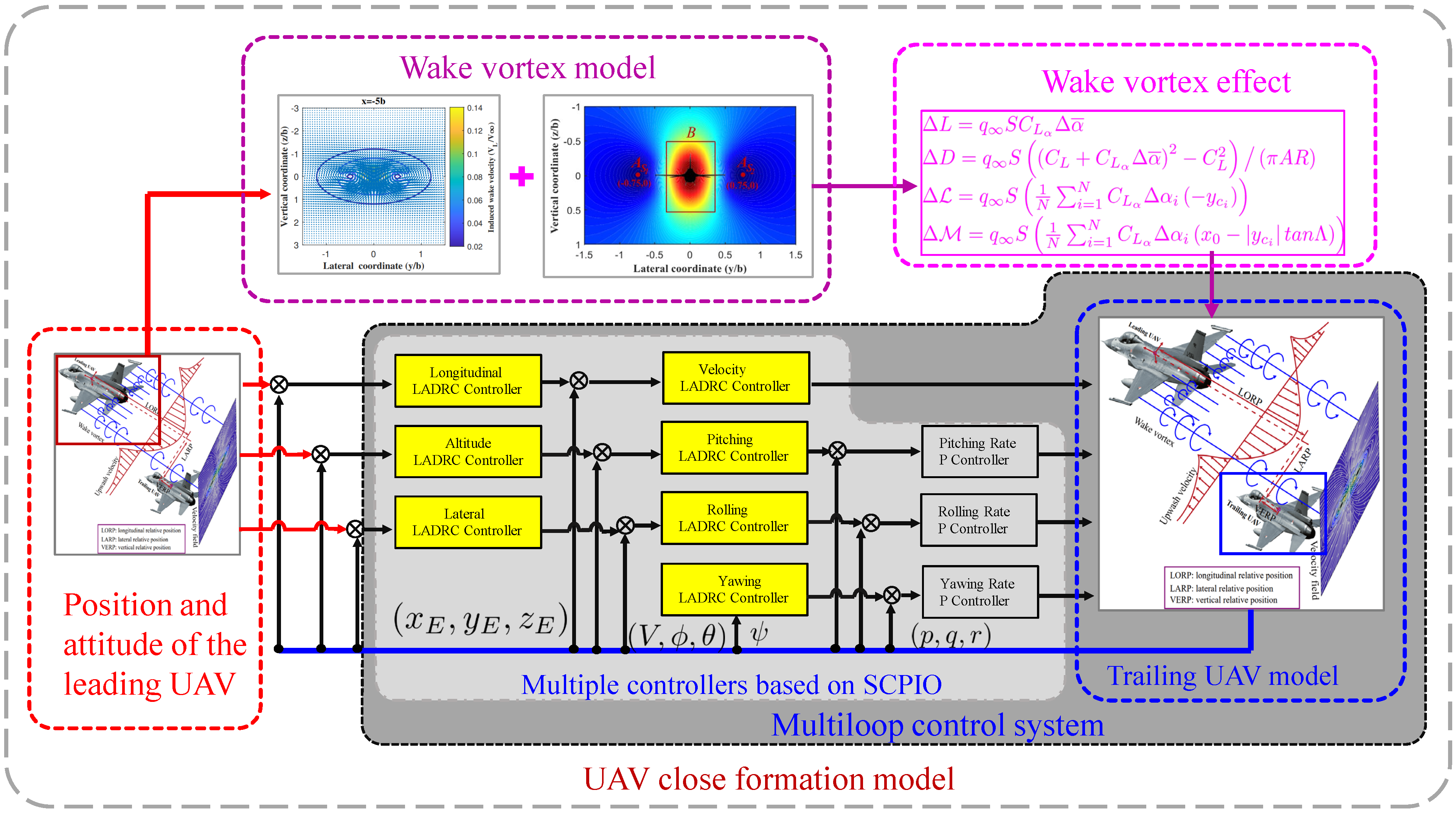
2. Close Formation Modeling
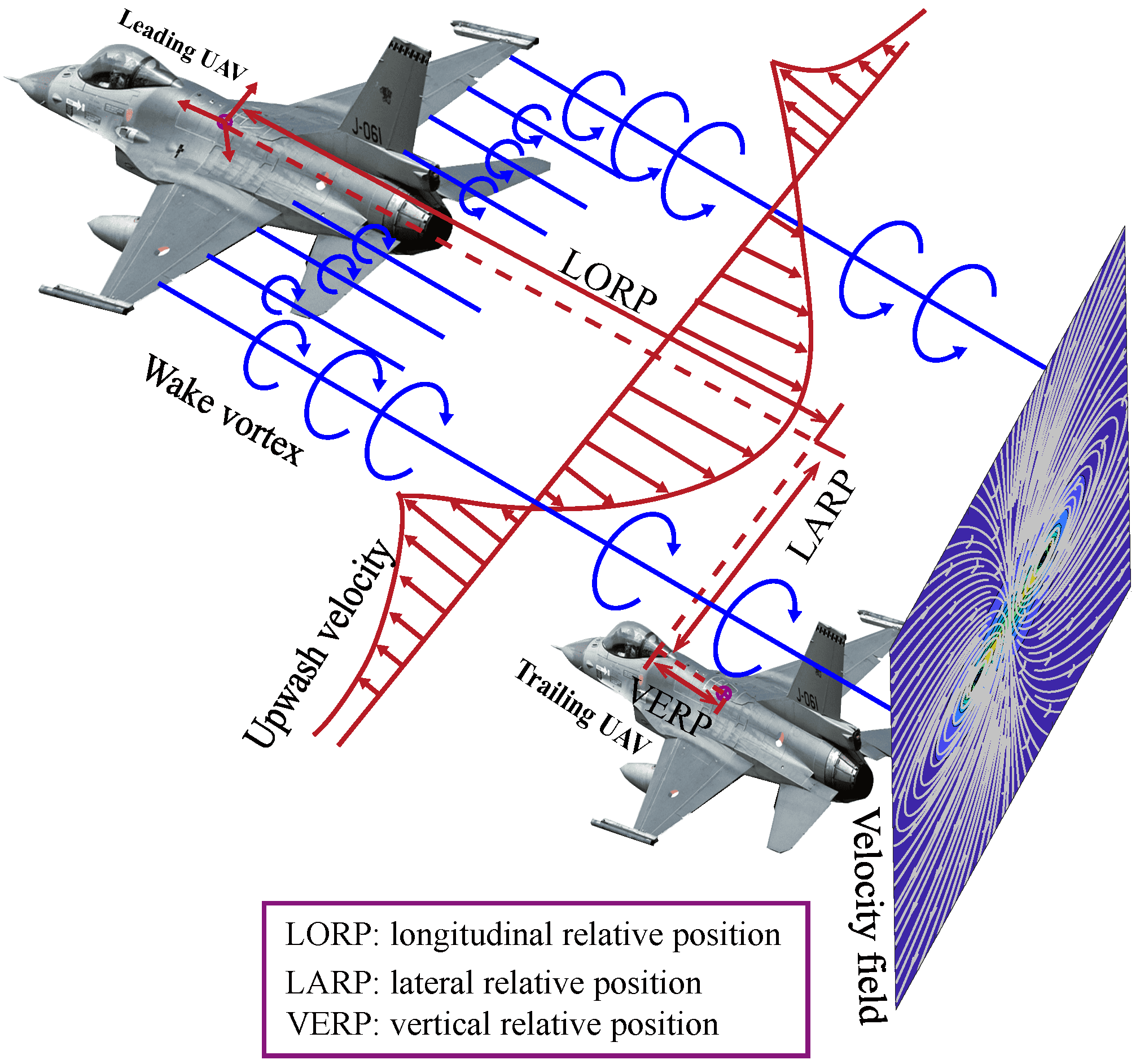
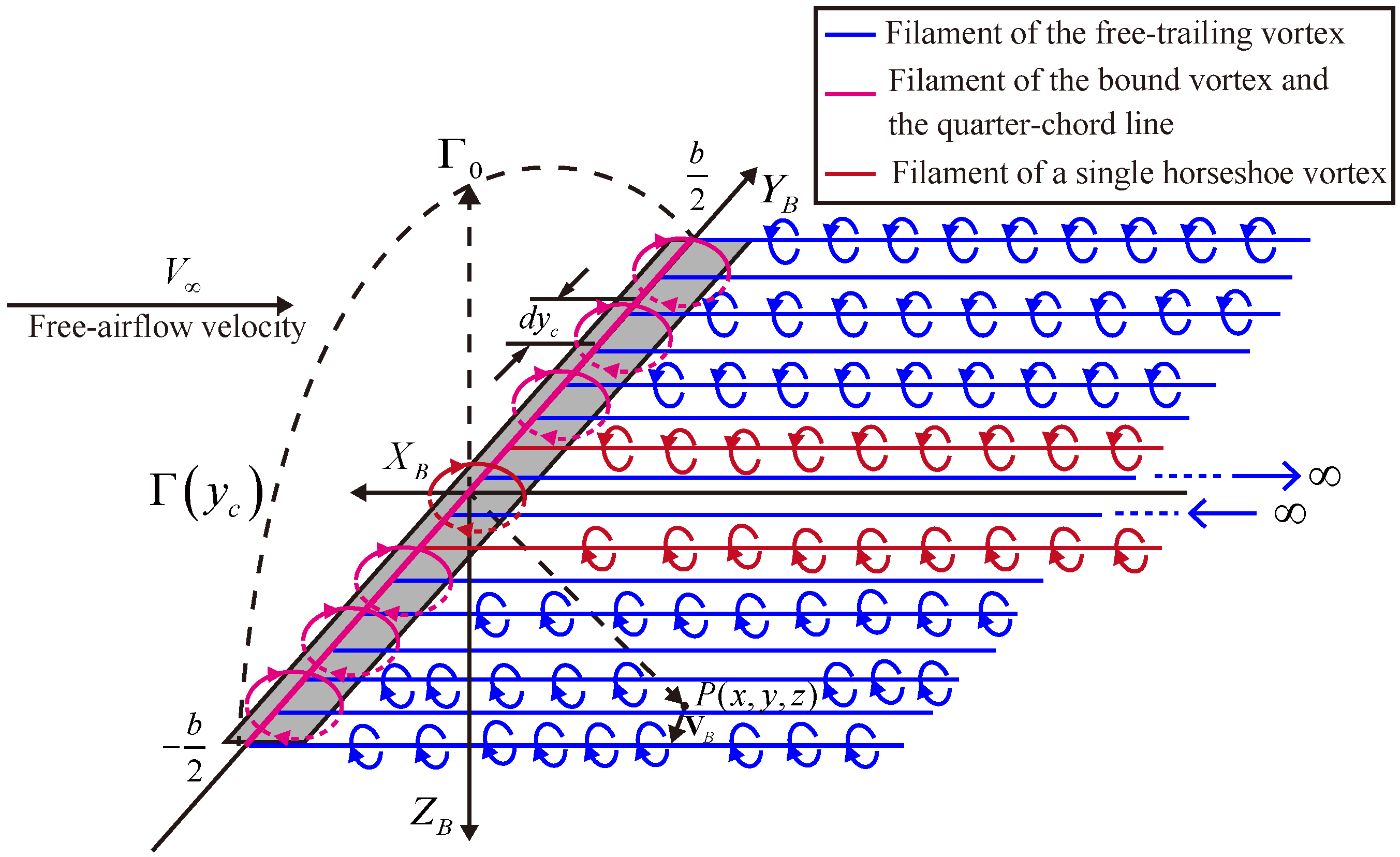
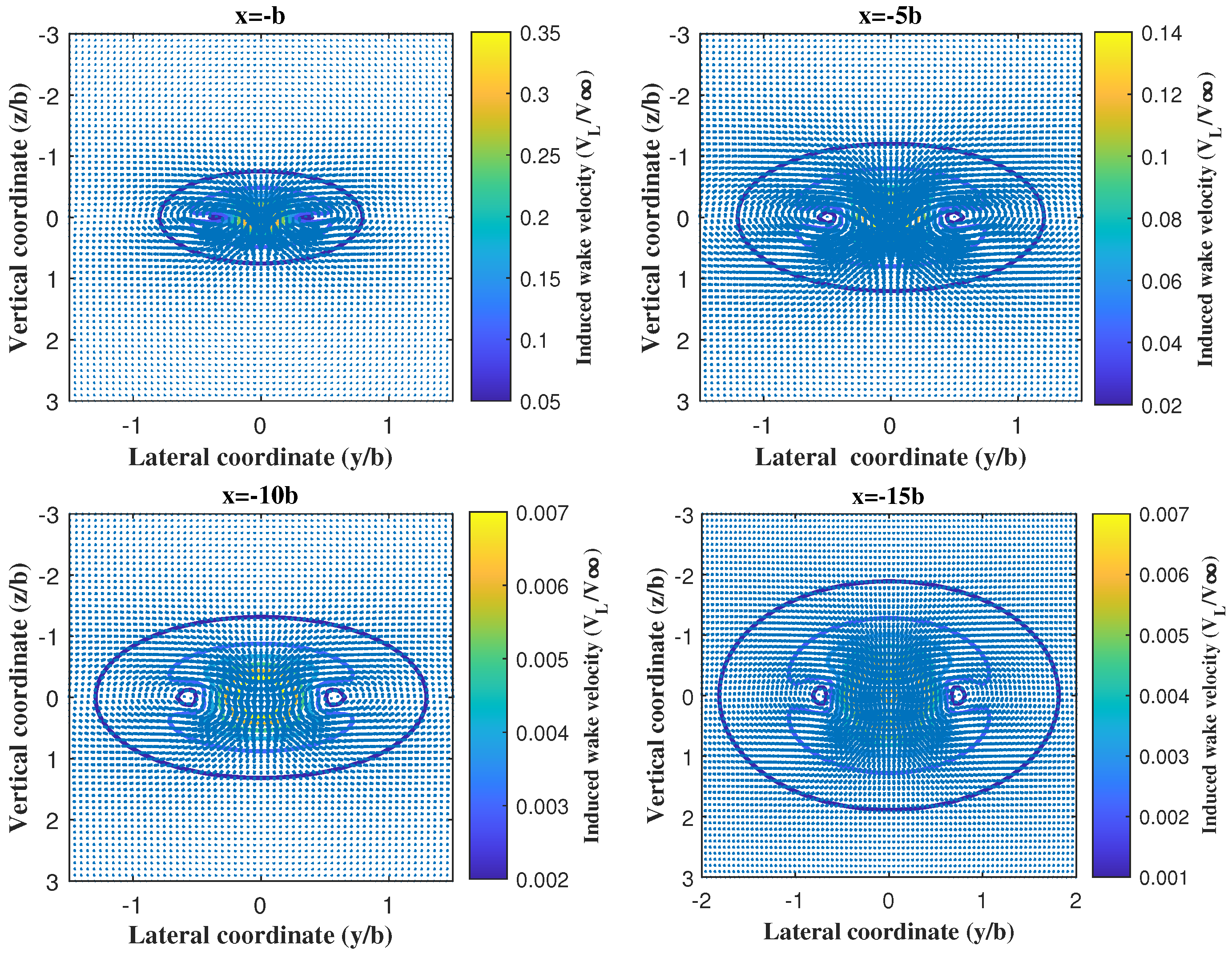
2.1. Wake Vortex Model
2.2. Trailing UAV Model
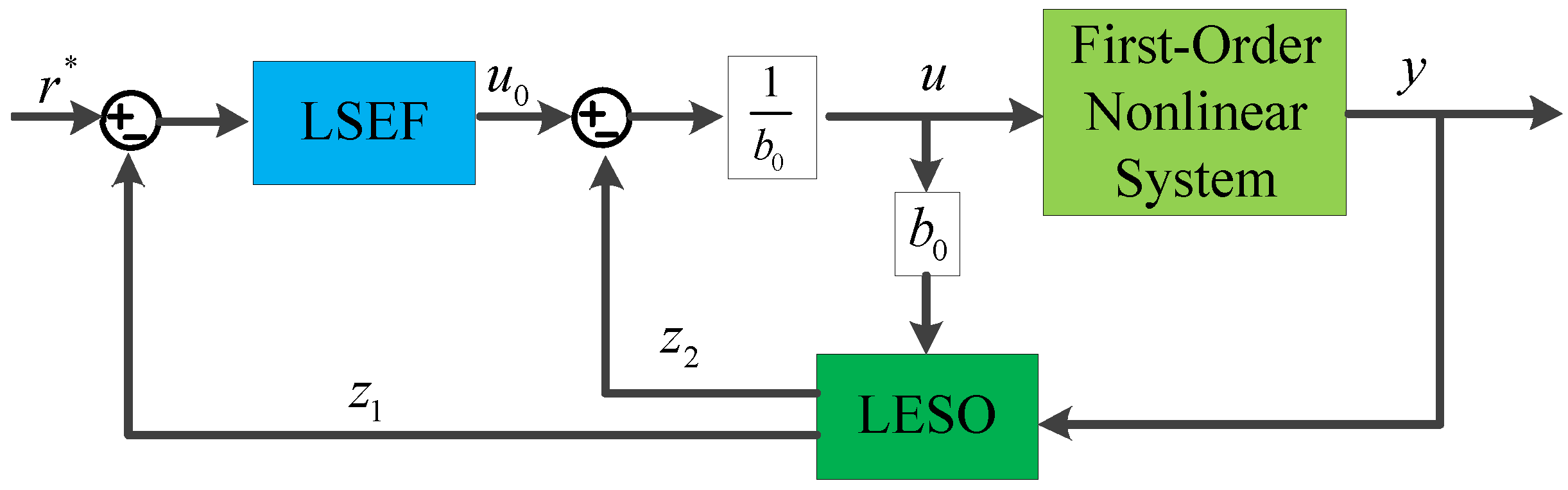
3. Structure of the First-Order LADRC
4. Robust Control System Design
4.1. Control Objective
4.2. Control System Design
4.3. Stability Analysis of the Control System
5. Sine-Powered Pigeon-Inspired Optimization
5.1. Standard PIO Algorithm
5.2. SCPIO Algorithm
5.3. Construction of the Fitness Function
5.4. Optimization Procedure
- Step 1.
- Initialize the SCPIO parameters, including the number of pigeons , the dimension of thesearch space , the maximum and minimum values of the map and compass factor and , the iteration numbers of two operators and , and the position and velocity of all pigeons.
- Step 2.
- Drive the close-formation simulation system using the pigeons in Step 1 to calculate the fitness function. Compare the fitness value and find the current optimal position.
- Step 3.
- Conduct the iteration. If , perform the improved map and compass operator to update the pigeons. Then, drive the close-formation simulation system using the updated pigeons to calculate the fitness function. Update the optimal position by comparing the new fitness values with the current optimal one. When , perform the landmark operator to continue the similar optimization process.
- Step 4.
- Once the iteration time reaches , terminate the algorithm and output the optimal position .
| Algorithm 1: SCPIO. |
 |
6. Simulation Results and Analysis
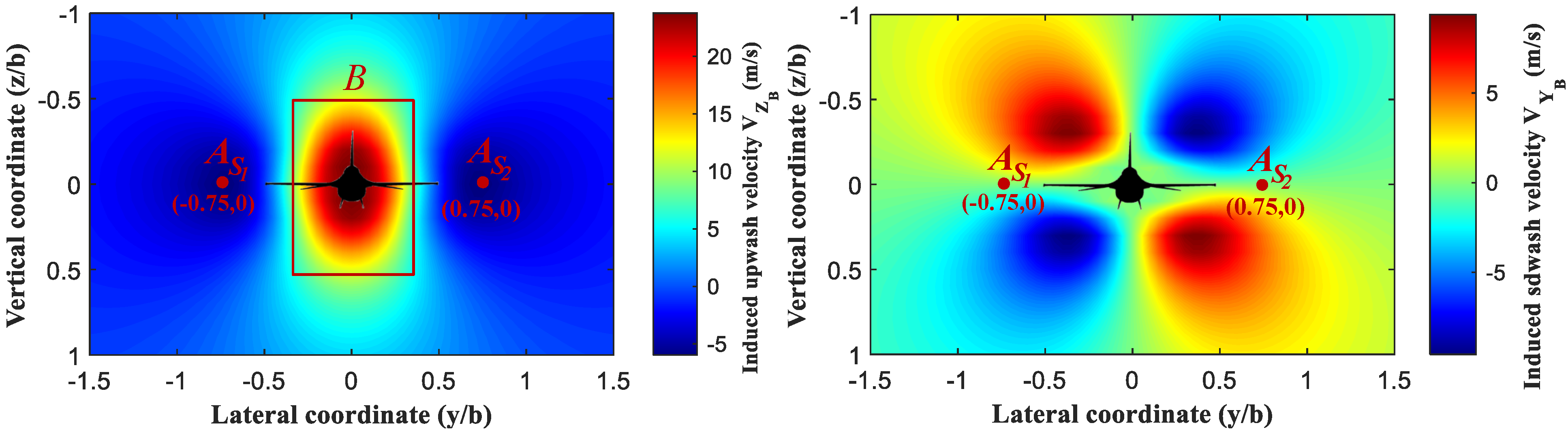
6.1. Analysis of the Sweet Spot
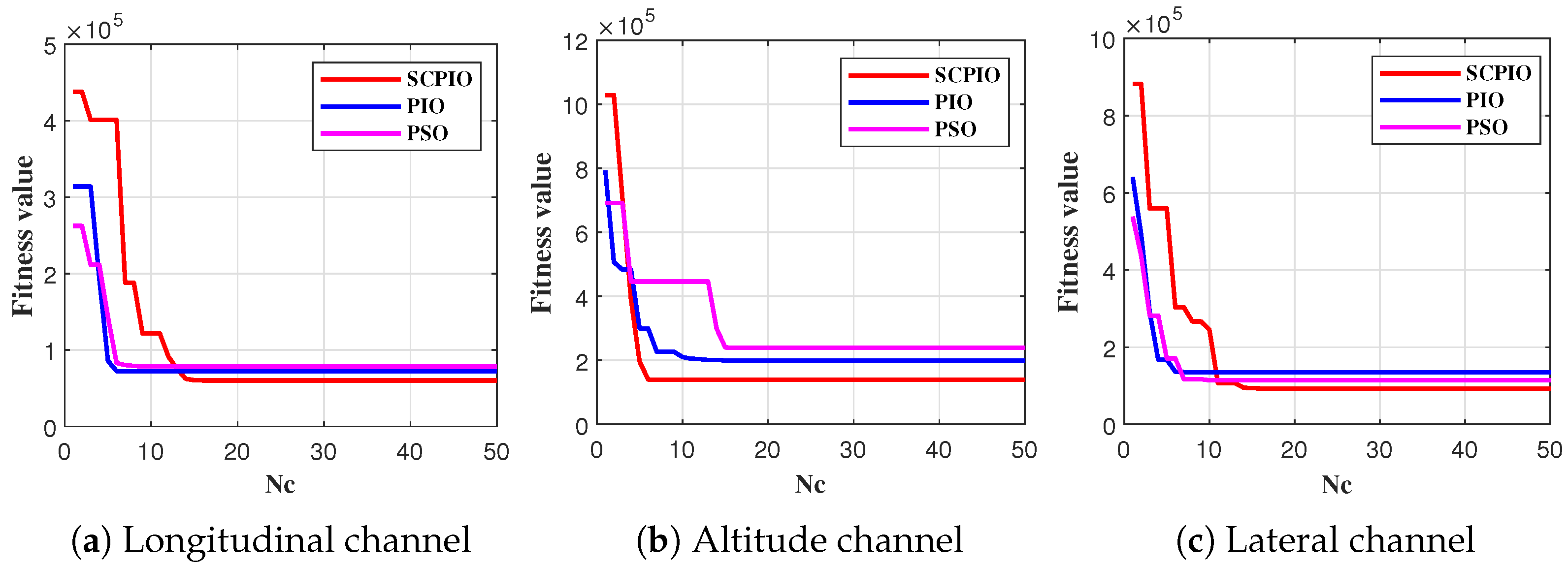
6.2. Implementation of Control System Optimization
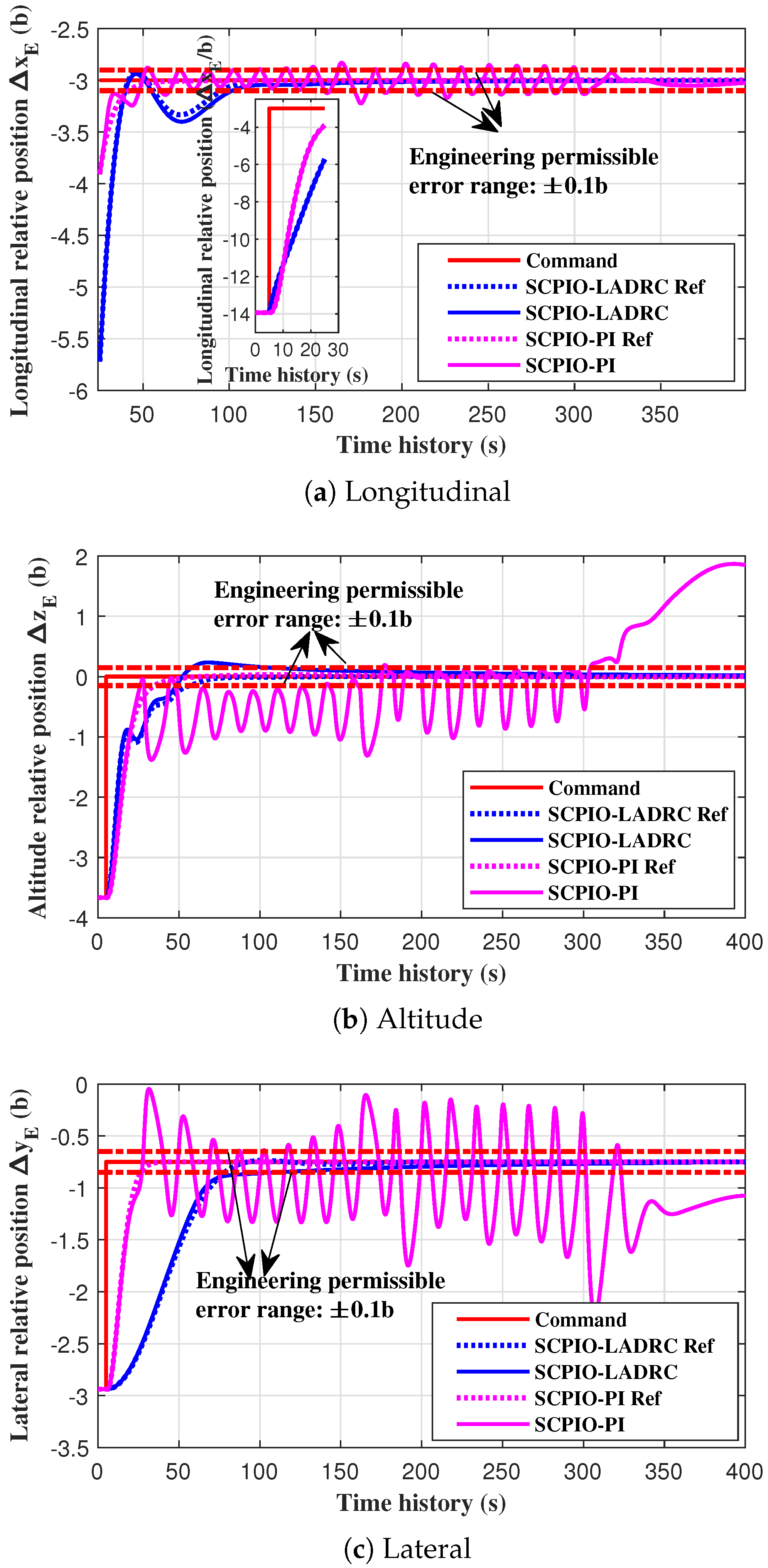
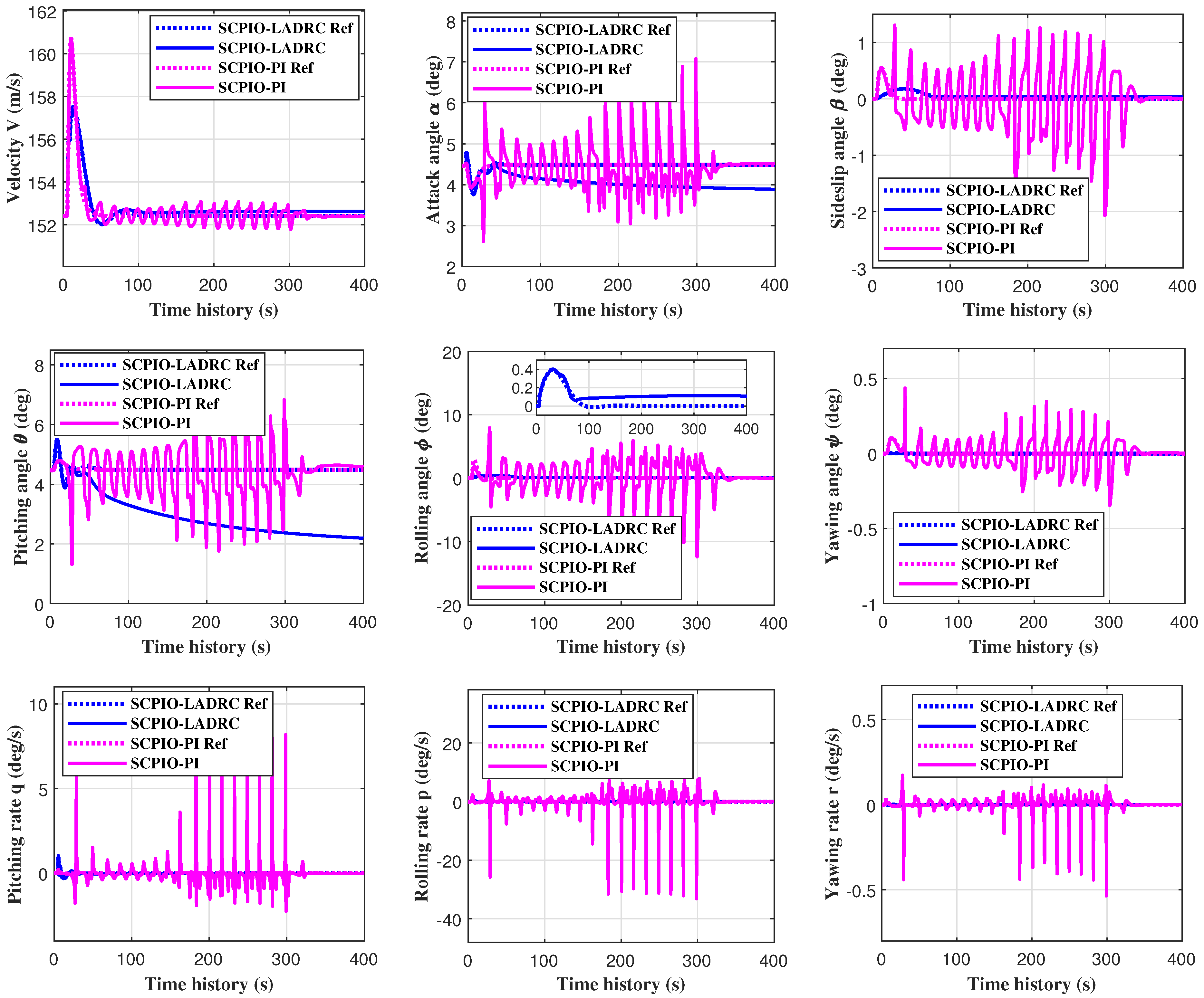
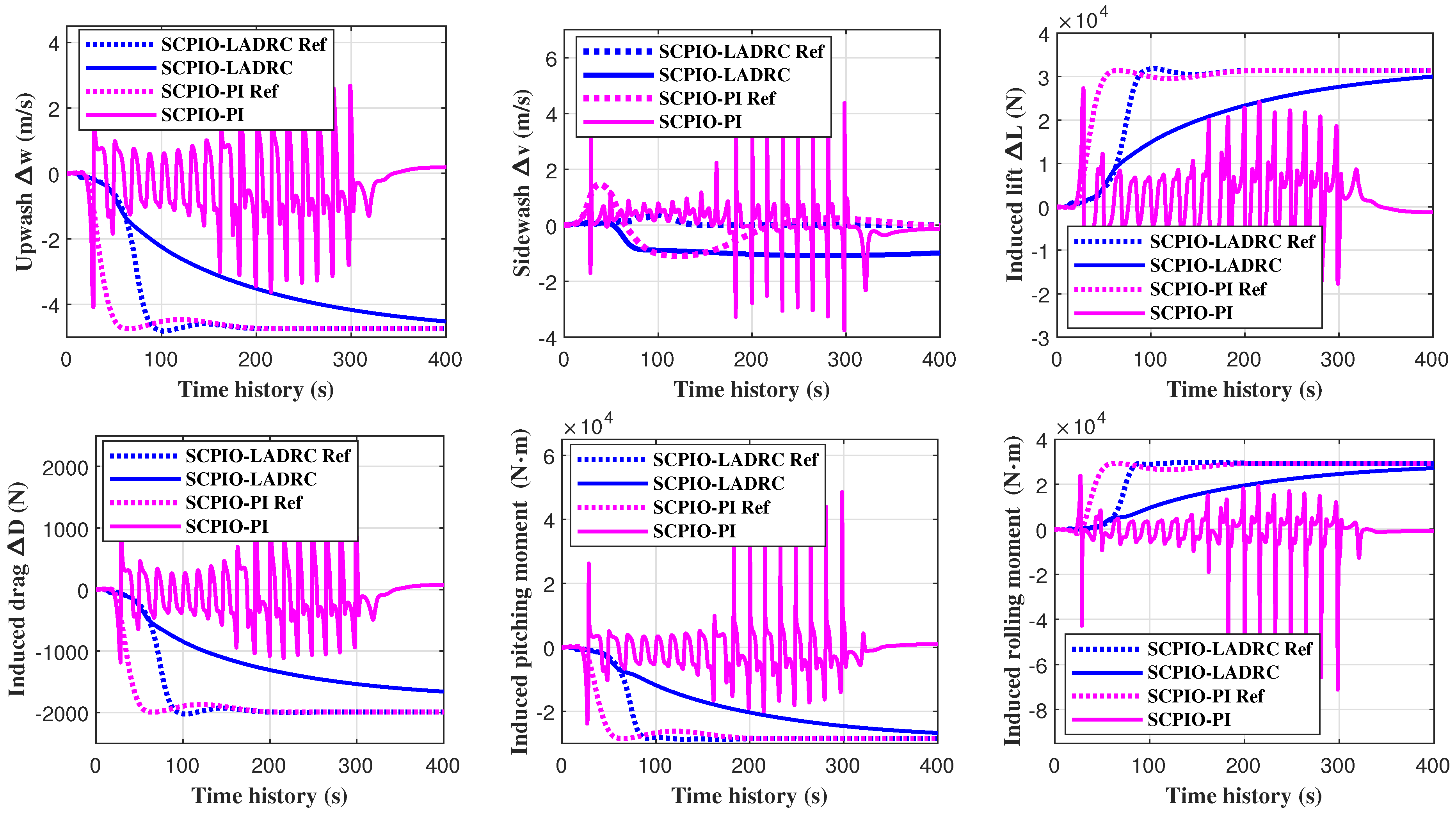
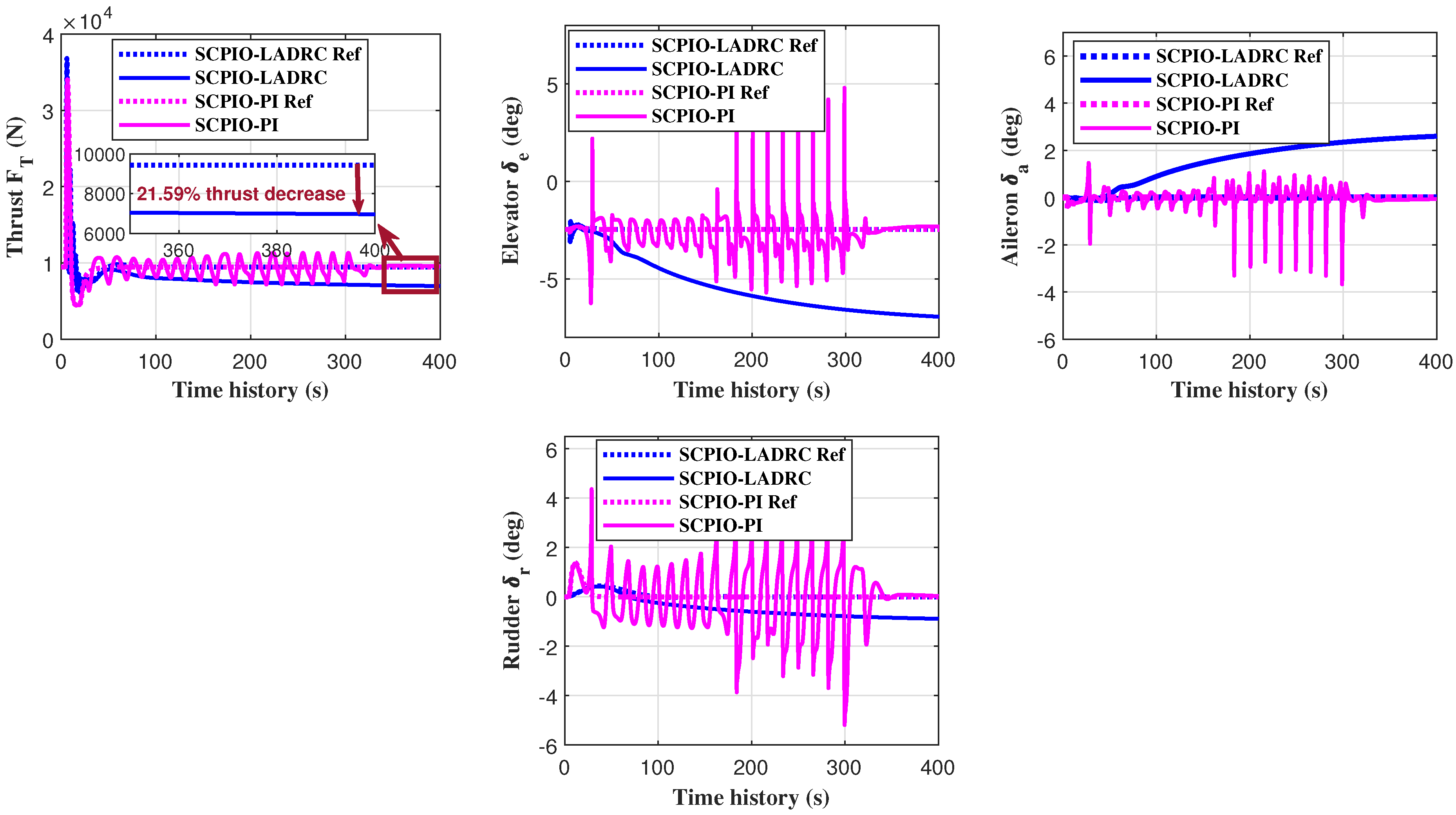
6.3. Tracking-Performance Validation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhan, G.; Gong, Z.; Lv, Q.; Zhou, Z.; Wang, Z.; Yang, Z.; Zhou, D. Flight Test of Autonomous Formation Management for Multiple Fixed-Wing UAVs Based on Missile Parallel Method. Drones 2022, 6, 99. [Google Scholar] [CrossRef]
- Li, S.; Li, Y.; Zhu, J.; Liu, B. Predefined Location Formation: Keeping Control for UAV Clusters Based on Monte Carlo Strategy. Drones 2022, 7, 29. [Google Scholar] [CrossRef]
- Xu, D.; Guo, Y.; Yu, Z.; Wang, Z.; Lan, R.; Zhao, R.; Xie, X.; Long, H. PPO-Exp: Keeping Fixed-Wing UAV Formation with Deep Reinforcement Learning. Drones 2022, 7, 28. [Google Scholar] [CrossRef]
- Jiang, Y.; Bai, T.; Wang, Y. Formation Control Algorithm of Multi-UAVs Based on Alliance. Drones 2022, 6, 431. [Google Scholar] [CrossRef]
- Luo, Y.; Bai, A.; Zhang, H. Distributed formation control of UAVs for circumnavigating a moving target in three-dimensional space. Guid. Navig. Control 2021, 1, 2150014. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.H. Aerodynamics Modeling and Analysis of Close Formation Flight. J. Aircr. 2017, 54, 2192–2204. [Google Scholar] [CrossRef]
- Kent, T.E.; Richards, A.G. Analytic Approach to Optimal Routing for Commercial Formation Flight. J. Guid. Control Dyn. 2015, 38, 1872–1884. [Google Scholar] [CrossRef]
- Bangash, Z.A.; Sanchez, R.P.; Ahmed, A.; Khan, M.J. Aerodynamics of Formation Flight. J. Aircr. 2006, 43, 907–912. [Google Scholar] [CrossRef]
- Hanson, C.E.; Pahle, J.; Reynolds, J.R.; Andrade, S.; Nelson, B. Experimental Measurements of Fuel Savings During Aircraft Wake Surfing. In Proceedings of the 2018 Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Zhang, Q.; Liu, H.H. Aerodynamic Model-Based Robust Adaptive Control for Close Formation Flight. Aerosp. Sci. Technol. 2018, 79, 5–16. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.H. UDE-Based Robust Command Filtered Backstepping Control for Close Formation Flight. IEEE Trans. Ind. Electron. 2018, 65, 8818–8827. [Google Scholar] [CrossRef]
- Galzi, D.; Shtessel, Y. Closed-Coupled Formation Flight Control Using Quasi-Continuous High-Order Sliding-Mode. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007. [Google Scholar]
- Liu, C.; Jiang, B.; Zhang, K. Adaptive Fault-Tolerant H-Infinity Output Feedback Control for Lead–Wing Close Formation Flight. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2804–2814. [Google Scholar] [CrossRef]
- Yuan, G.; Xia, J.; Duan, H. A Continuous Modeling Method via Improved Pigeon-Inspired Optimization for Wake vVortices in UAVs Close Formation Flight. Aerosp. Sci. Technol. 2022, 120, 107259. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Z.; Zhang, X.; Sun, Q.; Sun, M. A Novel Control Scheme for Quadrotor UAV Based upon Active Disturbance Rejection Control. Aerosp. Sci. Technol. 2018, 79, 601–609. [Google Scholar] [CrossRef]
- Ahi, B.; Nobakhti, A. Hardware Implementation of an ADRC Controller on a Gimbal Mechanism. IEEE Trans. Control Syst. Technol. 2018, 26, 2268–2275. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and Bandwidth-Parameterization Based Controller Tuning. In Proceedings of the American Control Conference, Minneapolis, MN, USA, July 2003; Available online: https://www.semanticscholar.org/paper/Scaling-and-bandwidth-parameterization-based-tuning-Gao/4f4d7b650767e01138a6969b97e5e2601779fb4c (accessed on 20 March 2023).
- Zheng, Q.; Gaol, L.Q.; Gao, Z. On Stability Analysis of Active Disturbance Rejection Control for Nonlinear Time-Varying Plants with Unknown Dynamics. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Qi, Y.; Liu, J.; Yu, J. Dynamic Modeling and Hybrid Fireworks Algorithm-Based Path Planning of an Amphibious Robot. Guid. Navig. Control 2022, 2, 2250002. [Google Scholar] [CrossRef]
- Zhu, K.; Han, B.; Zhang, T. Multi-UAV Distributed Collaborative Coverage for TargetSearch Using Heuristic Strategy. Guid. Navig. Control 2021, 1, 2150002. [Google Scholar] [CrossRef]
- Duan, H.; Qiao, P. Pigeon-Inspired Optimization: A New Swarm Intelligence Optimizer for Air Robot Path Planning. Int. J. Intell. Comput. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Tong, B.; Wei, C.; Shi, Y. Fractional Order Darwinian Pigeon-Inspired Optimization for Multi-UAV Swarm Controller. Guid. Navig. Control 2022, 2, 2250010. [Google Scholar] [CrossRef]
- Duan, H.; Zhao, J.; Deng, Y.; Shi, Y.; Ding, X. Dynamic Discrete Pigeon-Inspired Optimization for Multi-UAV Cooperative Search-Attack Mission Planning. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 706–720. [Google Scholar] [CrossRef]
- Huo, M.; Duan, H.; Fan, Y. Pigeon-Inspired Circular Formation Control for Multi-UAV System with Limited Target Information. Guid. Navig. Control 2021, 1, 2150004. [Google Scholar] [CrossRef]
- Chen, K.; Zhou, F.; Liu, A. Chaotic Dynamic Weight Particle Swarm Optimization for Numerical Function Optimization. Knowl. Based Syst. 2018, 139, 23–40. [Google Scholar] [CrossRef]
- Sonneveldt, L. Nonlinear F-16 Model Description; Delft University of Technology: Delft, The Netherlands, 2006. [Google Scholar]
- Richard, S.R. Nonlinear F-16 Simulation Using Simulink and Matlab; University of Minnesota: Minneapolis, MN, USA, 2003. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle Swarm Optimization: An Overview. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter | Description | Value |
|---|---|---|---|
| PSO | Maximum iterative number | 50 | |
| Number of particles | 100 | ||
| Inertia weight | 0.4 | ||
| Self-learning factor | 2 | ||
| Group-learning factor | 2 | ||
| PIO, SCPIO | Iteration number of the map and compass operator | 30 | |
| Iteration number of the landmark operator | 20 | ||
| Number of pigeons | 100 | ||
| R | Map and compass factor | 0.4 | |
| Range of the control parameter of the sine map | [0.1, 0.9] |
| Channel | Control Parameters | Algorithm | Optimal Values | Fitness Value |
|---|---|---|---|---|
| Longitudinal | SCPIO | [0.0712, 0.11, 0.26, 6.12] | 60,126 | |
| PIO | [0.0634, 0.16, 0.23, 6.56] | 72,151 | ||
| PSO | [0.0607, 0.20, 0.21, 6.81] | 78,136 | ||
| Altitude | SCPIO | [0.06854, 0.71, 1.05, 8.21] | 139,842 | |
| PIO | [0.07345, 0.64, 1.16, 7.78] | 199,774 | ||
| PSO | [0.07562, 0.61, 1.24, 7.46] | 239,729 | ||
| Lateral | , | SCPIO | [0.0254, 0.27, 0.98, 7.04, 1.10, 7.58] | 93,251 |
| PIO | [0.0207, 0.30, 0.87, 7.43, 1.21, 7.42] | 134,696 | ||
| PSO | [0.0318, 0.25, 1.25, 6.78, 1.00, 7.63] | 113,974 |
| Channel | Control Parameters | Algorithm | Optimal Values | Fitness Value |
|---|---|---|---|---|
| Longitudinal | SCPIO | [0.1024, 250.7534] | 28,146 | |
| Altitude | SCPIO | [0.0021, 0.0005, 1.1568] | 39,084 | |
| Lateral | SCPIO | [0.08791, 1.1326, 2.9736] | 10,211 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, G.; Duan, H. Robust Control for UAV Close Formation Using LADRC via Sine-Powered Pigeon-Inspired Optimization. Drones 2023, 7, 238. https://doi.org/10.3390/drones7040238
Yuan G, Duan H. Robust Control for UAV Close Formation Using LADRC via Sine-Powered Pigeon-Inspired Optimization. Drones. 2023; 7(4):238. https://doi.org/10.3390/drones7040238
Chicago/Turabian StyleYuan, Guangsong, and Haibin Duan. 2023. "Robust Control for UAV Close Formation Using LADRC via Sine-Powered Pigeon-Inspired Optimization" Drones 7, no. 4: 238. https://doi.org/10.3390/drones7040238
APA StyleYuan, G., & Duan, H. (2023). Robust Control for UAV Close Formation Using LADRC via Sine-Powered Pigeon-Inspired Optimization. Drones, 7(4), 238. https://doi.org/10.3390/drones7040238