


A Survey on the Design Aspects and Opportunities in Age-Aware UAV-Aided Data Collection for Sensor Networks and Internet of Things Applications

 ,
,  , , ,
, , ,  and
and
Abstract
:1. Introduction
1.1. Applications of UAV-Aided Data Collection for WSNs/IoT
1.2. Objectives and Contributions of This Paper
- What are the pertinent architectural design considerations identified from the previous works on AoI minimization in UAV-assisted data collection for WSNs/IoT?
- What are the concerning issues related to the identified fundamental design aspects of AoI minimization in the literature on UAV-assisted WSNs/IoT?
- What are some potential study areas of AoI-aware UAV-assisted WSN/IoT network architectures?
- A comprehensive study of previous work on age-aware UAV-assisted WSNs/IoT for data gathering applications, focusing on the technical design aspects. This includes the classification of the studied works into three major categories and 17 subcategories, presenting illustrations on some of the common architectures, and identifying limitations and significant results in these works.
- A discussion on pertinent issues related to the identified design aspects, namely energy management, flight trajectory, and UAV/SN scheduling.
- A discussion of potential research directions in this field towards motivating further research and problem-solving in this area.
1.3. Related Surveys

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Year | Focus |
|---|---|---|
| [10] | 2015 | Distributed processing applications for UAVs |
| [11] | 2014 | 3D wireless ad hoc and sensor networks |
| [12] | 2014 | The use of multiple UAVs for persistent surveillance |
| [13] | 2016 | UAV communication networks for civil applications |
| [14] | 2016 | UAVs for civil applications |
| [15] | 2016 | UAV-based disaster management applications and issues |
| [16] | 2017 | WSN- and multi-UAV-assisted disaster management |
| [17] | 2017 | UAV-based disaster prediction and management |
| [18] | 2017 | UAV-based intelligent transport for smart cities |
| [19] | 2017 | UAV-assisted disaster management |
| [20] | 2019 | Collaborative UAV-WSN for monitoring |
| [21] | 2019 | Autonomous inspection via multi-UAV |
| [22] | 2020 | UAV applications in WSNs |
| [23] | 2019 | Green UAV for public safety applications |
| [24] | 2020 | Aerial wireless relay for emergencies |
| [25] | 2020 | FANET technologies and applications |
| [26] | 2020 | UAV data collection in the IoT |
| [27] | 2020 | UAV applications for precision agriculture |
| [28] | 2021 | Viticulture |
| [30] | 2020 | Mobile edge computing in UAV networks |
| [31] | 2020 | Air–ground integrated edge systems |
| [32] | 2020 | UAV softwarization applications |
| [34] | 2020 | Internet of Flying Things |
| [33] | 2021 | UAV for 5G and beyond |
| [39] | 2022 | Micro UAV charging techniques |
| [40] | 2022 | Applications in disaster management |
| [41] | 2022 | Drone scheduling problems |
| [42] | 2022 | Drone-based logistics systems |
| [43] | 2022 | Farm monitoring and pesticide spraying |
| [44] | 2022 | Green UAV for 6G |
| [45] | 2022 | UAV path planning using optimization |
| [46] | 2022 | UAV for precision agriculture |
| [47] | 2022 | Computing for UAV-assisted 6G and Industry 4.0/5.0 |
| [48] | 2022 | UAV-based forest health monitoring |
| [49] | 2022 | AI-enabled routing protocols for UAVs |
| [50] | 2022 | AI applied to path planning in UAV swarms |
| [51] | 2022 | Cyber security threats and solutions for UAVs |
| [52] | 2022 | Environmental monitoring |
| [53] | 2022 | UAV-assisted data collection for IoT |
| [54] | 2022 | AI-powered 3D deployment of drone BS |
| [55] | 2022 | Forest insect pests and disease monitoring |
| [56] | 2022 | SDN solutions for drone detection and defense |
| [57] | 2022 | Resource optimization |
| [58] | 2022 | UAV placement optimization for 5G and beyond |
| [59] | 2022 | UAV-aided maritime communications |
| [60] | 2022 | Drone-assisted monitoring of atmospheric pollution |
| [61] | 2022 | UAV digital technologies for Construction 4.0 |
| [62] | 2022 | UAV placement and trajectory optimization |
| [63] | 2022 | UAV deployment and trajectory |
| [64] | 2022 | Security threats to UAV-aided IoT applications |
| [65] | 2022 | AI meets UAVs for precision agriculture |
| [66] | 2022 | UAV placement and trajectory design optimization |
| [67] | 2022 | Physical layer security for UAVs |
| [68] | 2023 | UAV formation trajectory planning algorithms |
| [69] | 2023 | Drone routing for delivery systems |
| Ref | Year | Focus | Summary |
|---|---|---|---|
| [37] | 2021 | Low-latency cyber-physical systems | Provides an overview of the current state of the art in the design and optimization of low-latency cyber-physical systems and applications requiring timely status updates. It also describes the various methods and metrics used to evaluate the Age of Information (AoI) in a wide range of systems and explores the use of AoI optimization in cyber-physical applications. |
| [36] | 2022 | Ambient Intelligence (AmI) Internet of Things (IoT) networks | Provides a review on notations of AoI, parameters affecting AoI in IoT systems, and techniques for modeling AoI. No special attention was given to UAV-assisted IoT. |
| [35] | 2023 | Wireless communication networks in general | The paper provides a comprehensive survey of the Age of Information (AoI) in wireless networks and reviews current progress from an optimization perspective. This includes AoI definitions, optimal sampling policies, packet management strategies, scheduling policies, and potential future research directions for AoI research. |
| This paper | 2023 | Design considerations in age-aware UAV-IoT | The paper provides a comprehensive survey of the design aspects of Age of Information (AoI)-aware UAV-assisted IoT and its architectures. |
1.4. Paper Organization
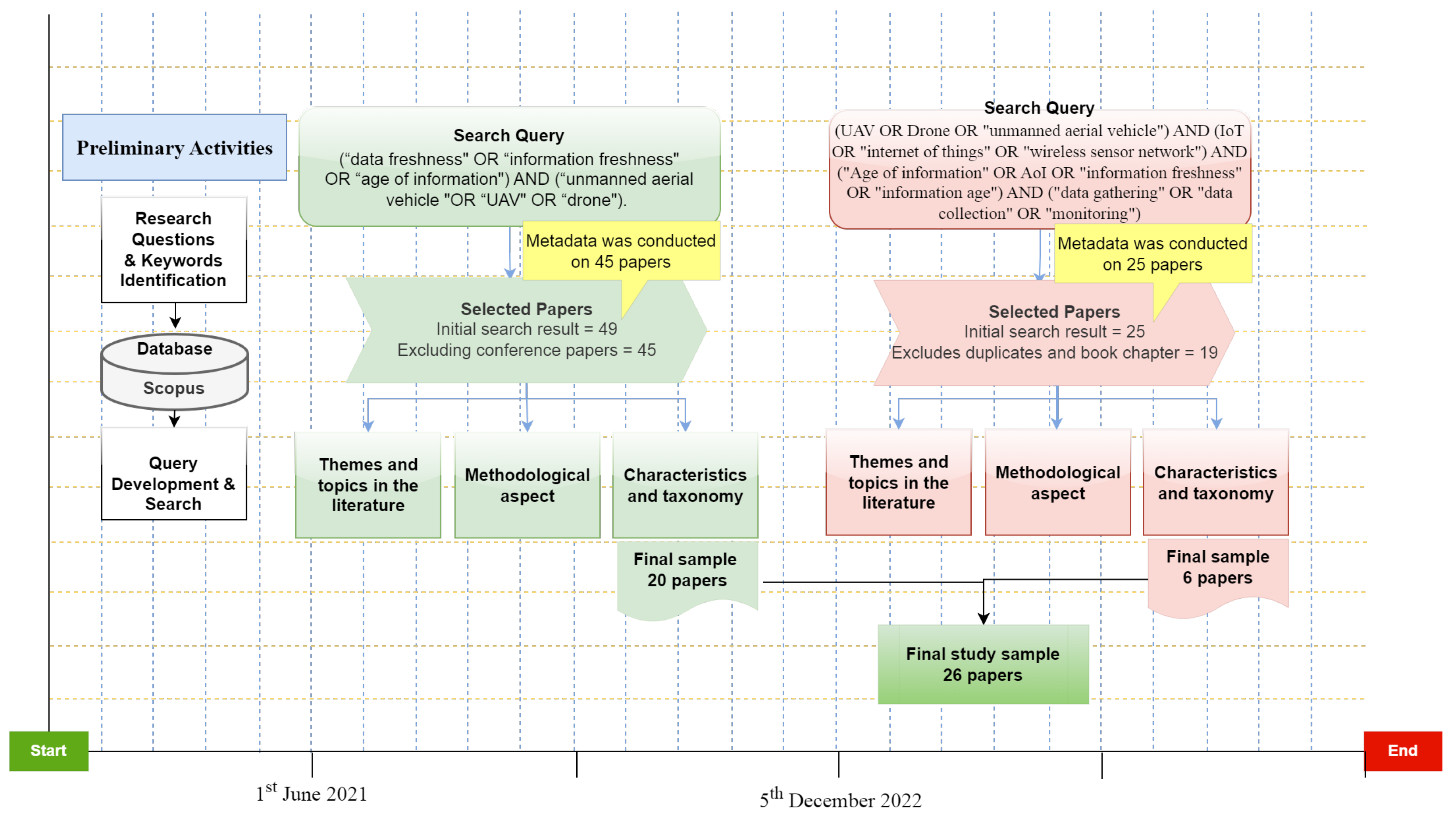
2. Methodology
3. AoI Minimization in UAV-Assisted WSN/IoT Application Architectures
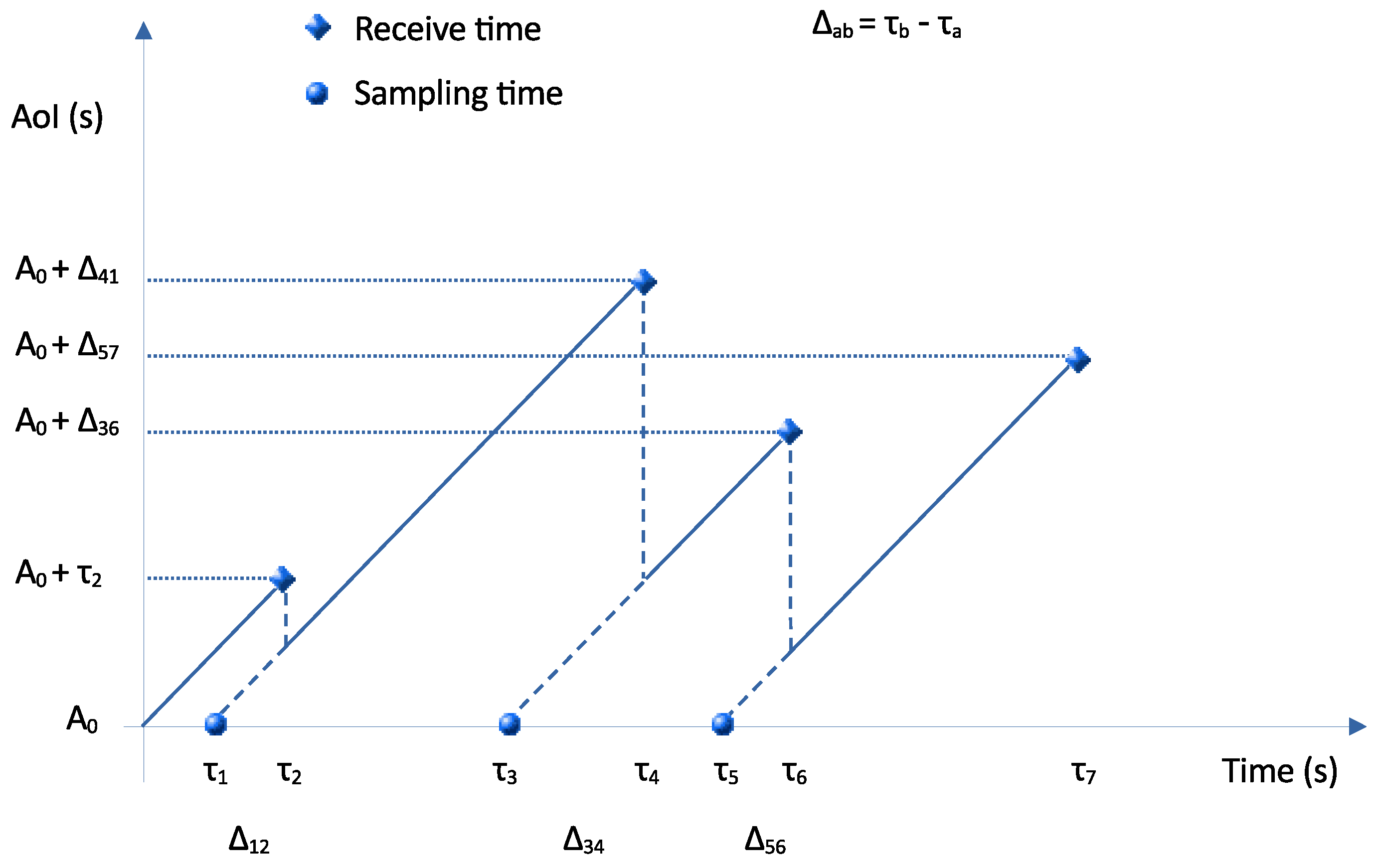
3.1. AoI Minimization
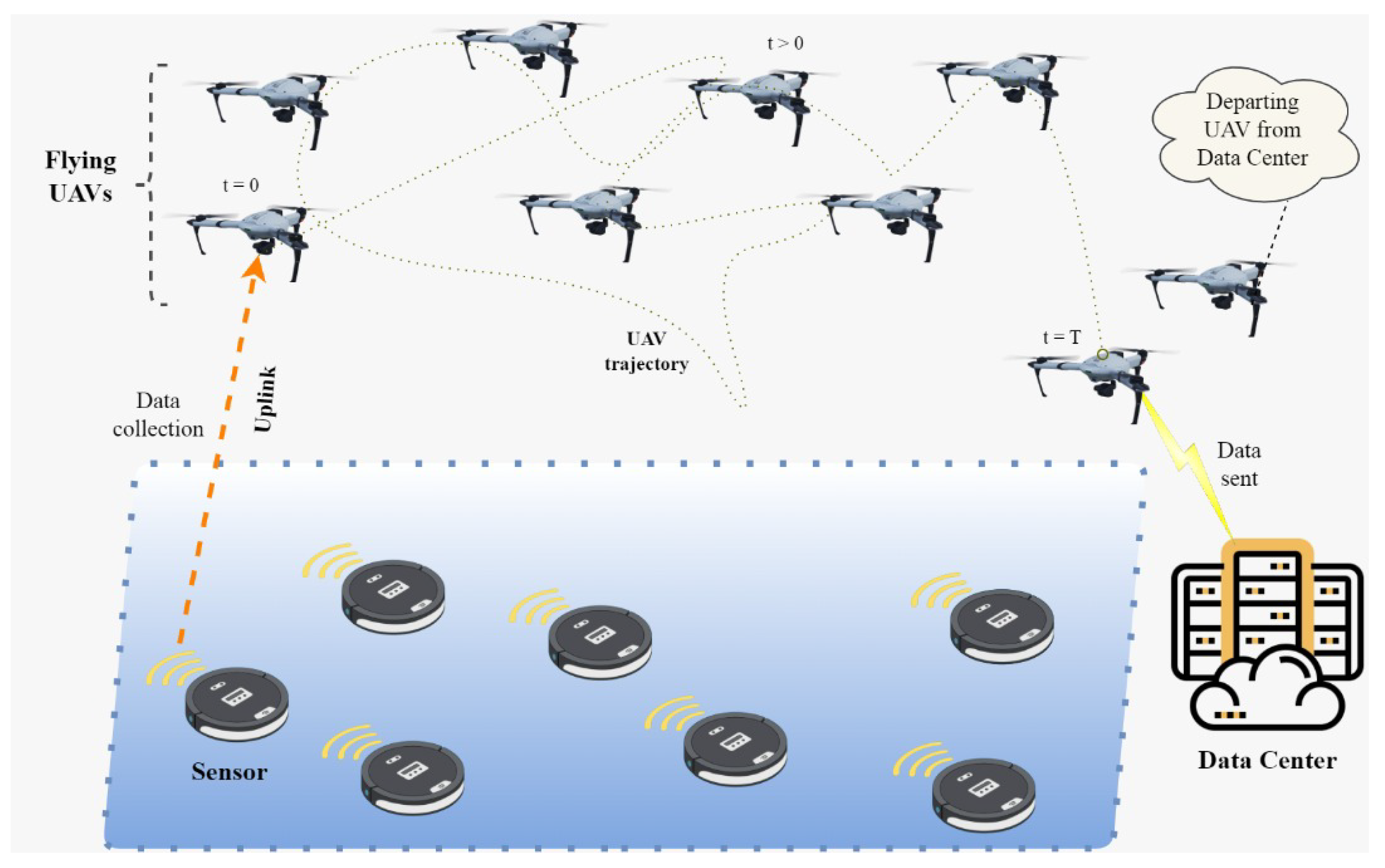
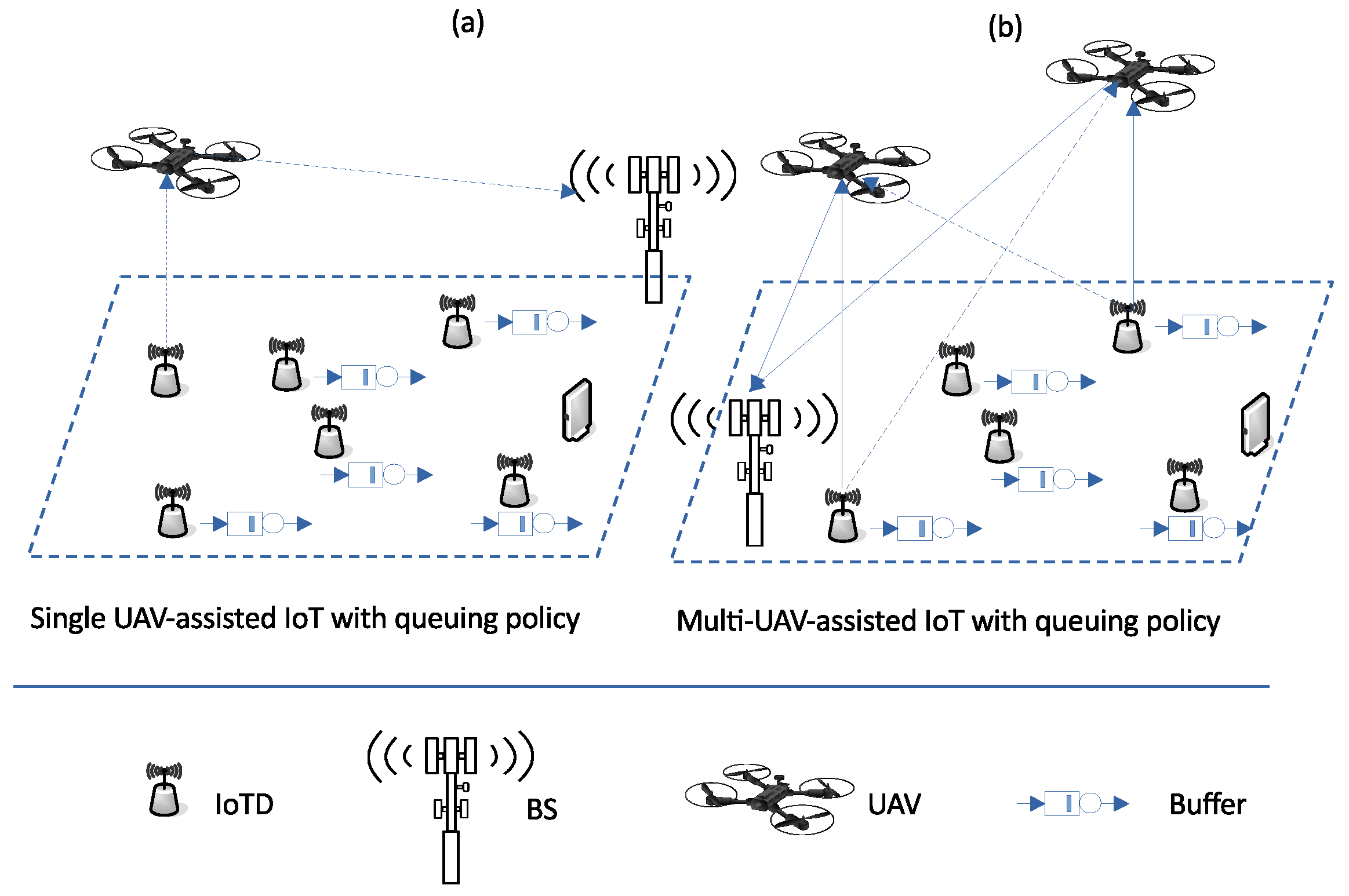
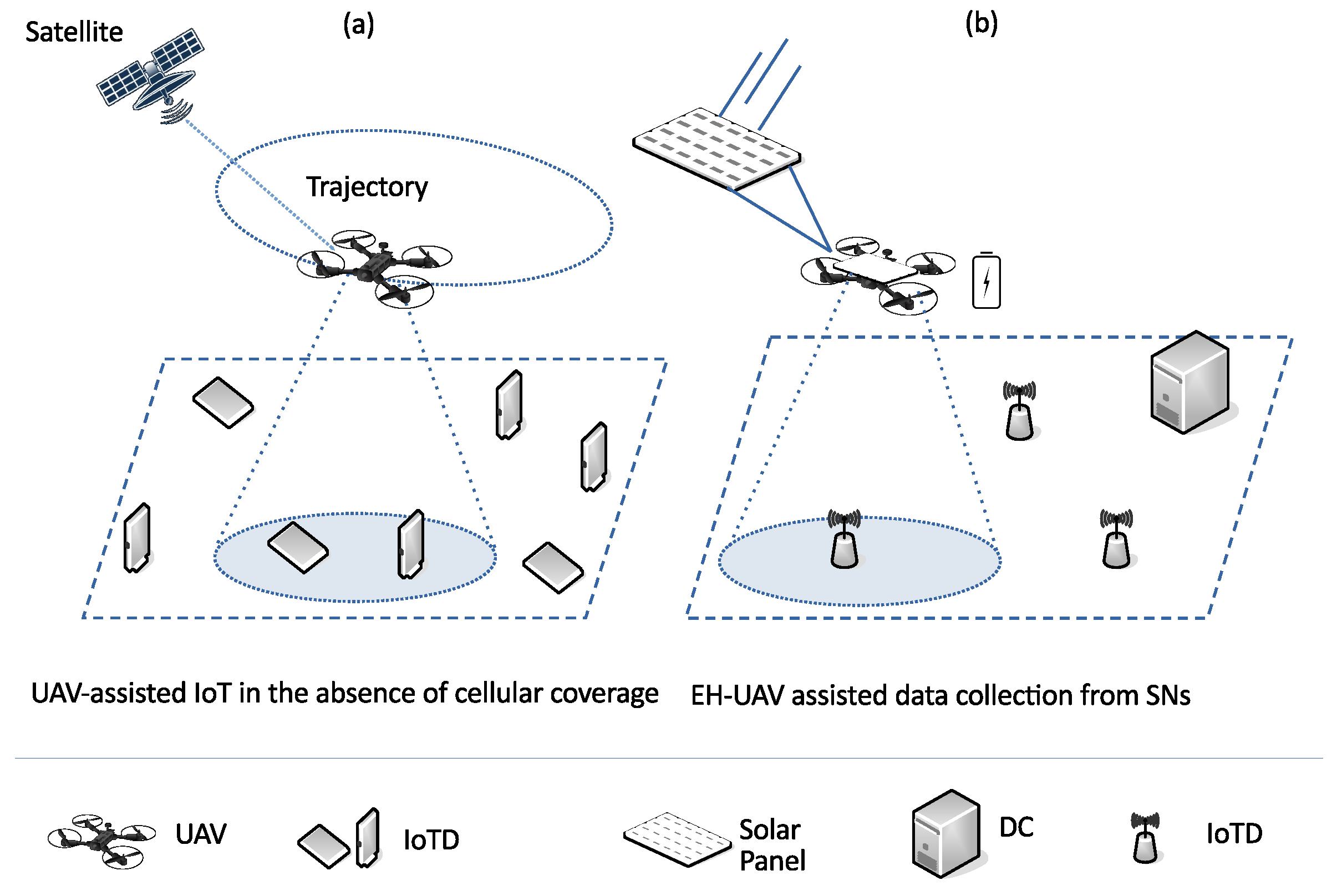
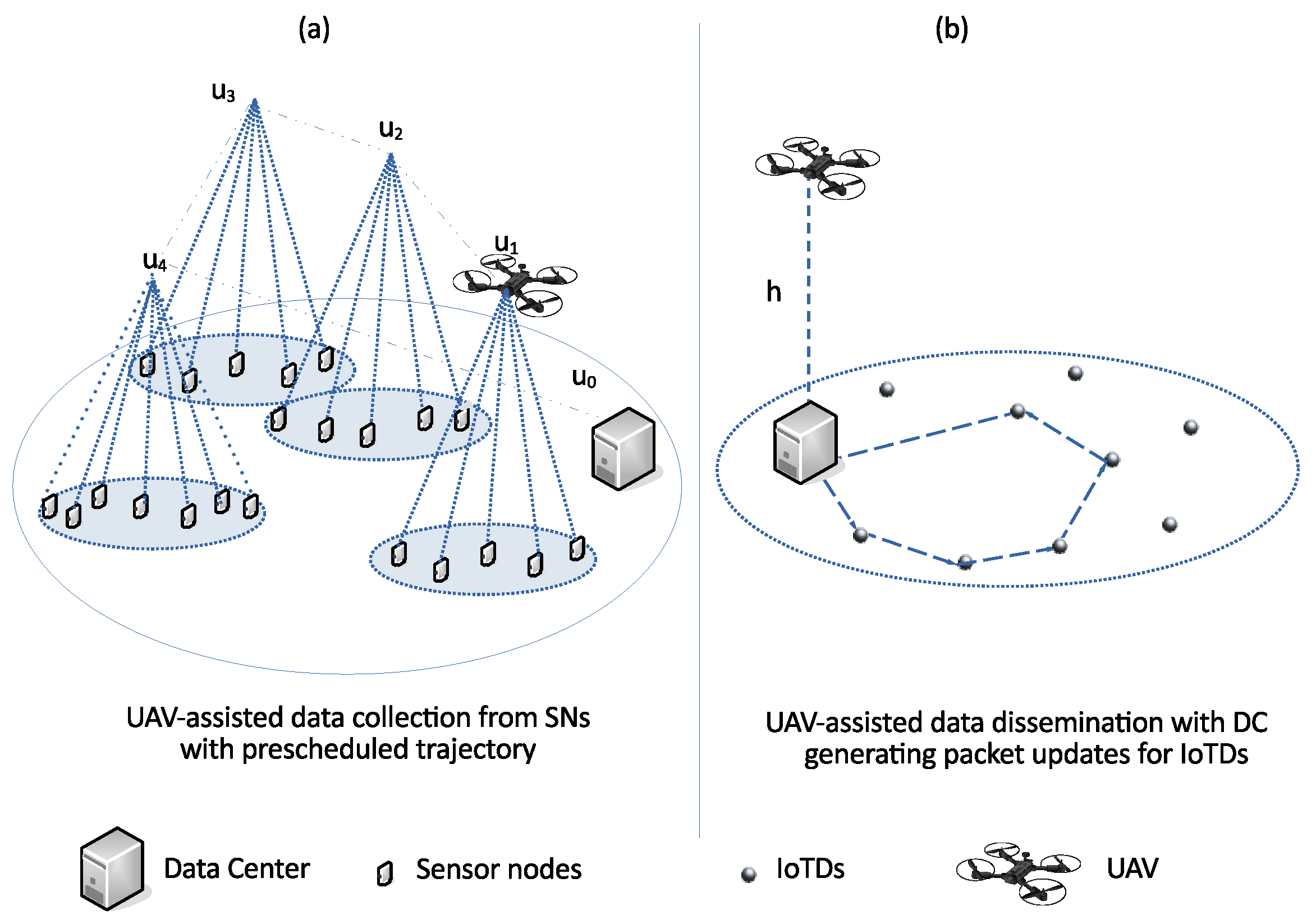
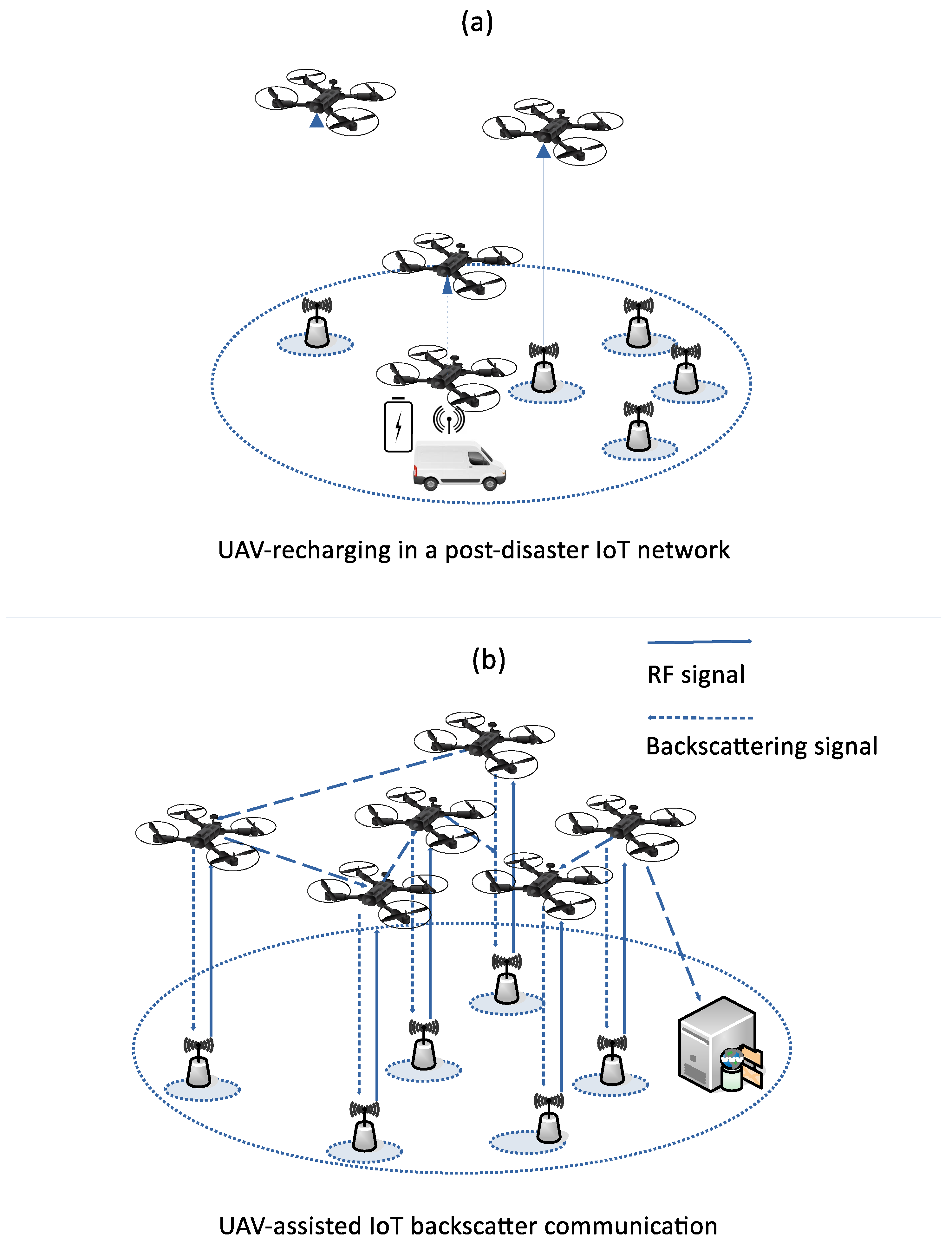
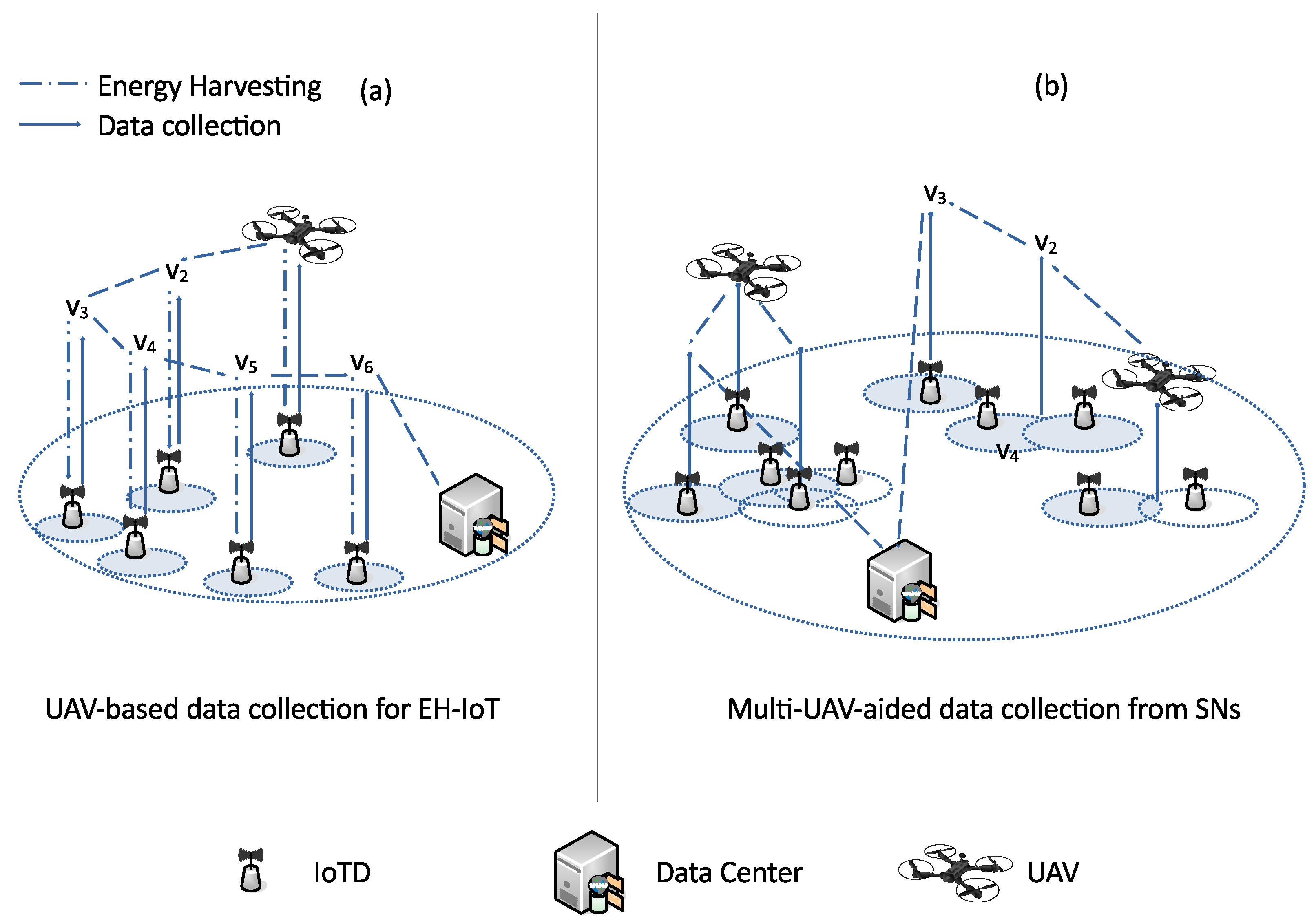
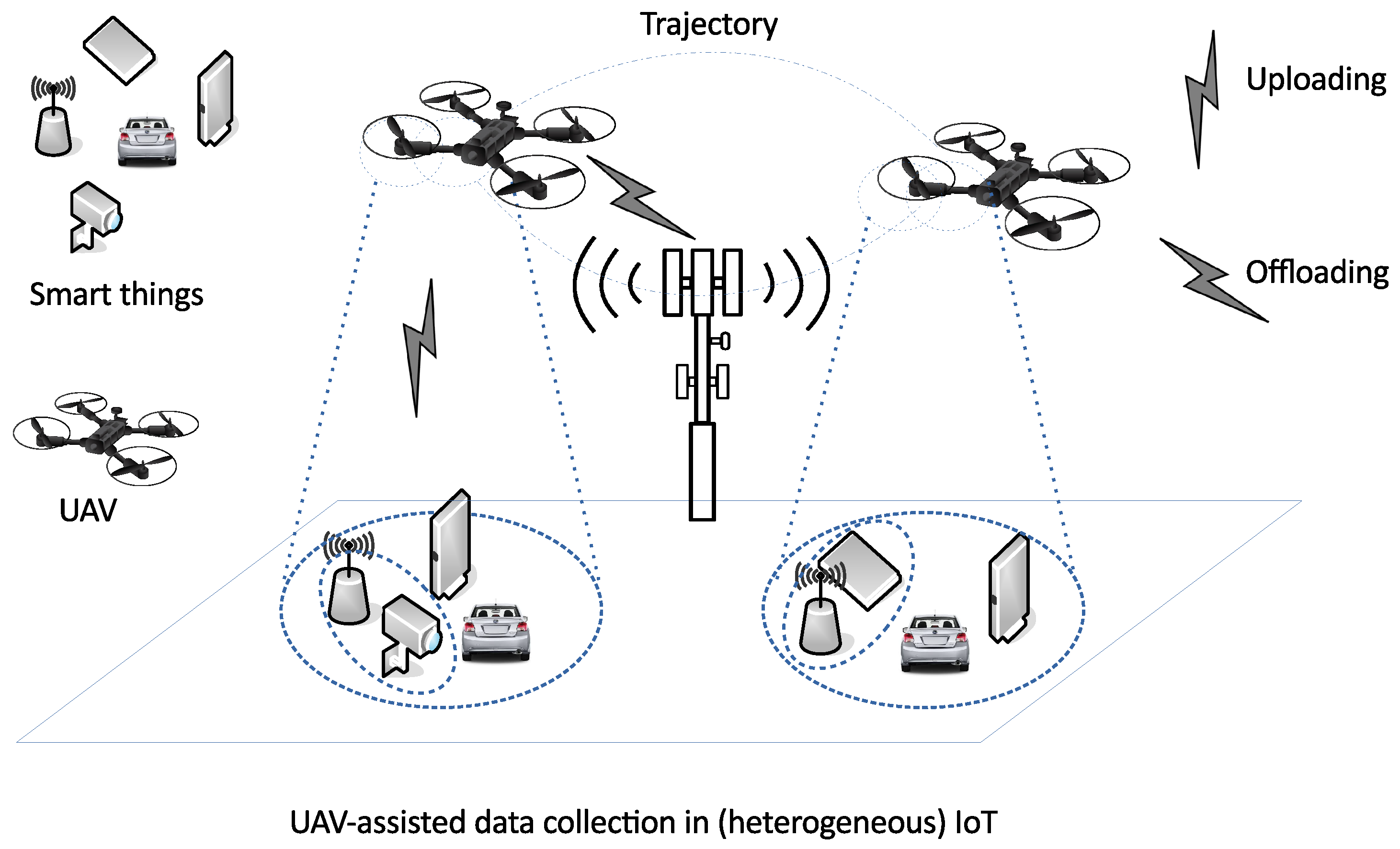
3.2. Typical Architecture of UAV-Assisted WSN/IoT Applications
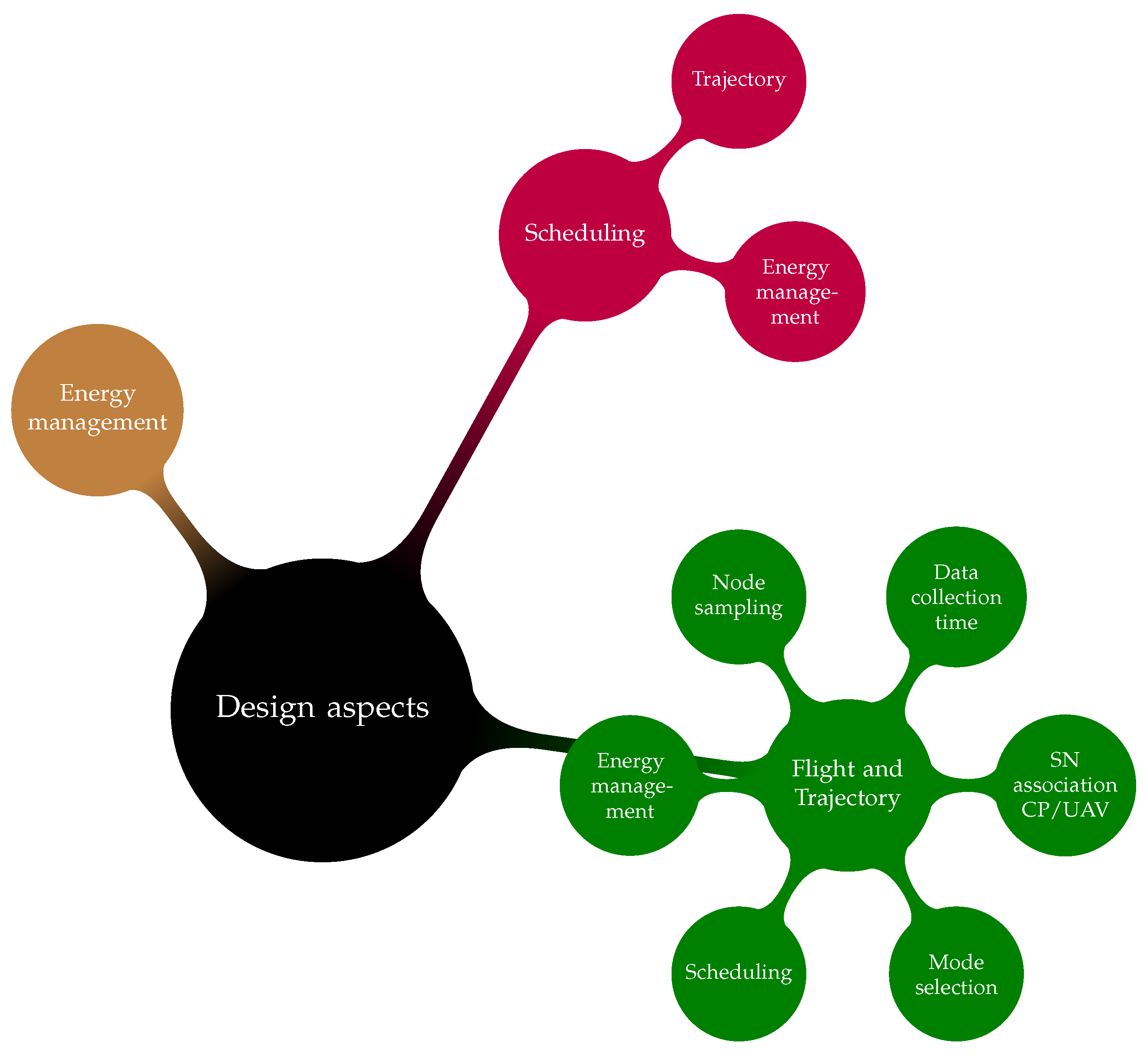
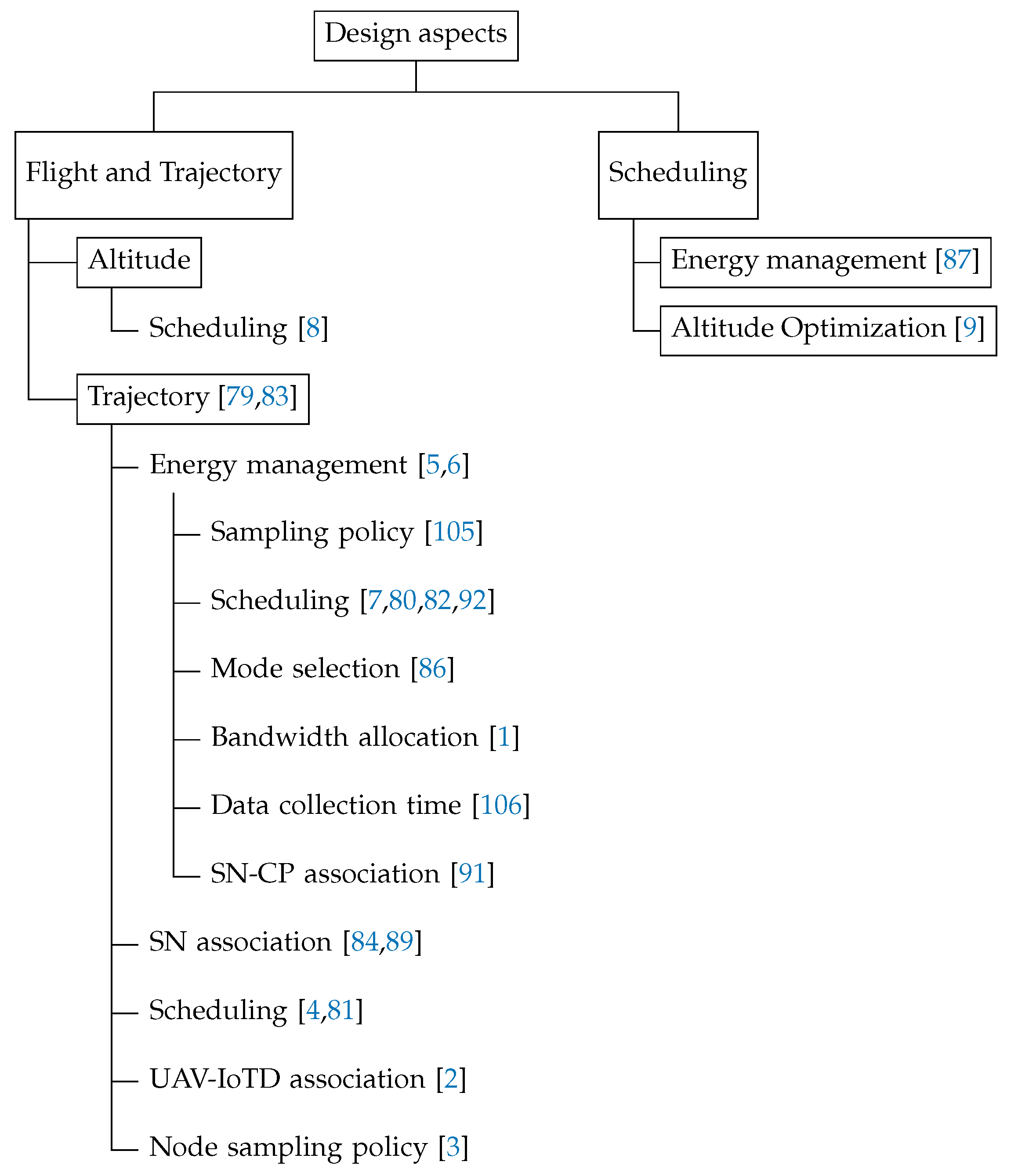
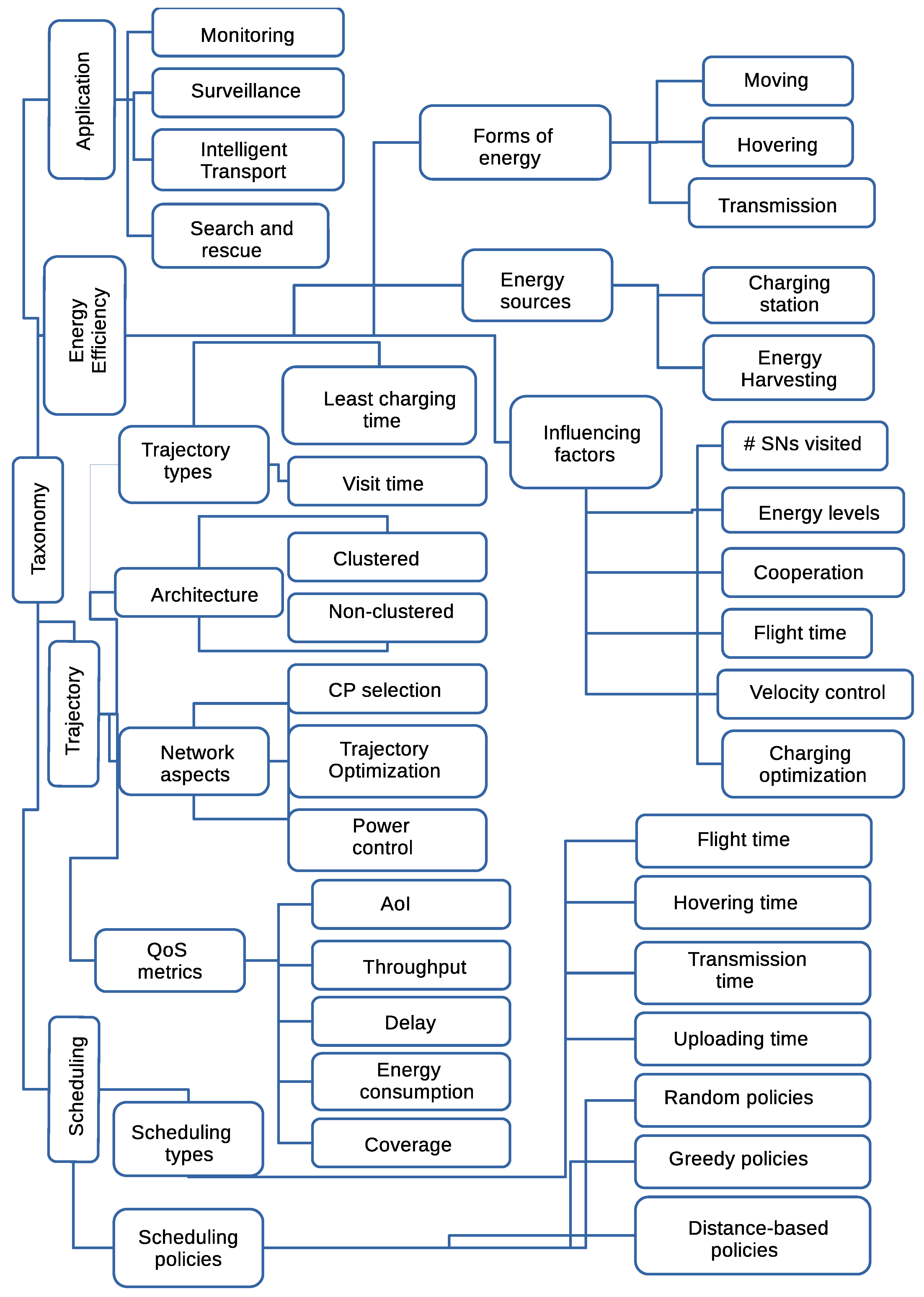
4. Classification of Multiple Design Aspects of AoI Minimization in UAV-Assisted WSN/IoT Applications in the Literature
4.1. UAV Trajectory
4.1.1. Trajectory and Sensor Node Association
4.1.2. Trajectory and Mode Selection
4.1.3. Trajectory and Scheduling
4.2. Trajectory and Energy Management (TE)
4.2.1. TE with Node Sampling Policy
4.2.2. TE with Node Selection
4.2.3. TE with Data Collection Time
4.2.4. TE with SN-CP Association
4.2.5. TE and Scheduling
4.3. UAV Altitude and Scheduling
4.4. Scheduling and Energy Consumption
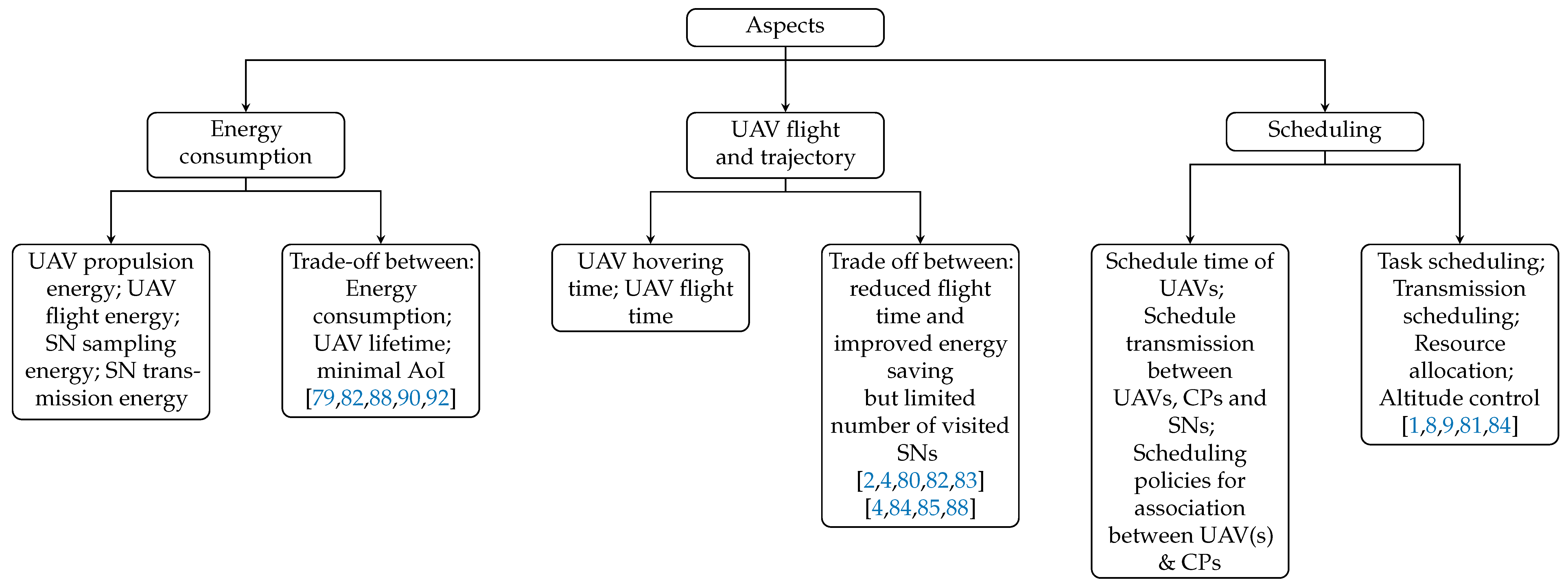
5. Issues Relating to the Fundamental Design Aspects
5.1. Energy Management
5.1.1. Importance of Energy Consumption in UAV-Assisted Data Gathering
5.1.2. Factors That Affect Energy Consumption in AoI-Aware UAV-Assisted Data Gathering
Number of Sensor Nodes Visited
Energy Levels
UAV Cooperation
Flight Time
Velocity Control
Charging Optimization
5.1.3. Issues Pertaining to Energy Efficiency
5.2. UAV Flight and Trajectory
5.3. UAV and Sensor Node Scheduling
Scheduling IoT Devices
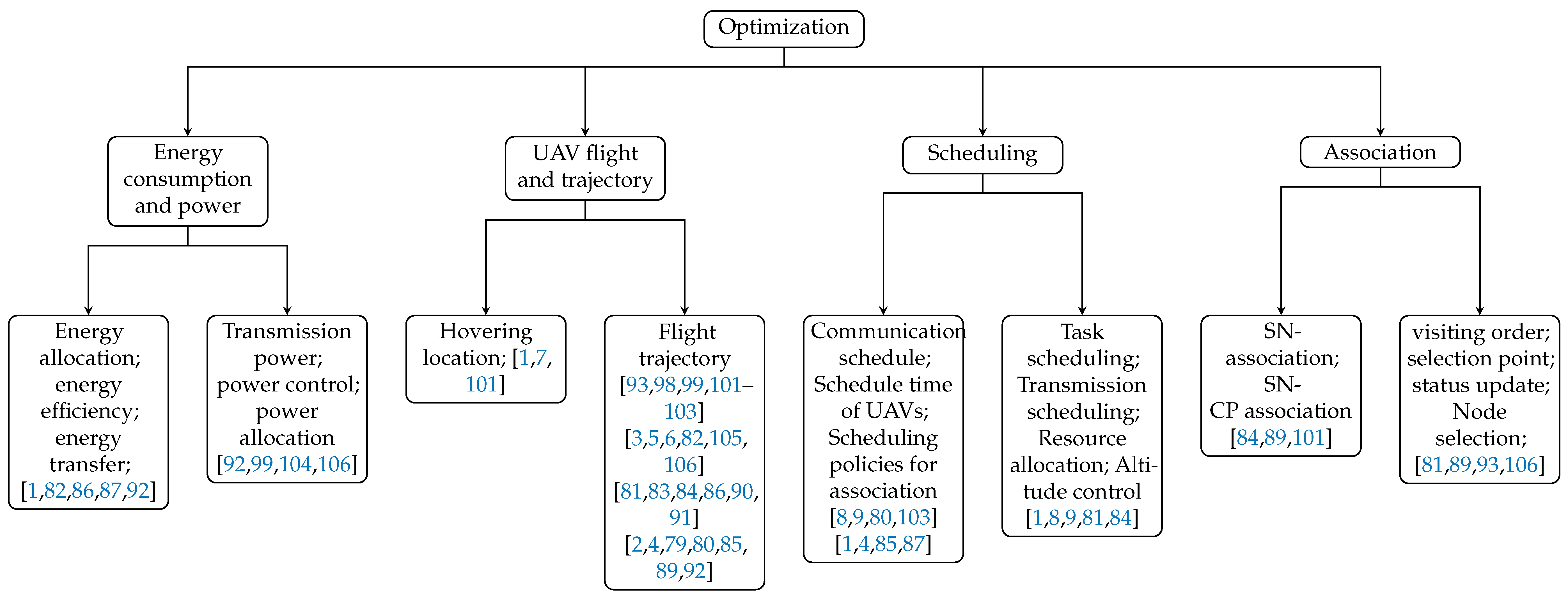
6. Discussion and Future Considerations
6.1. Network Architecture and Size
6.2. Traffic Prioritization
6.3. Association
6.4. Optimization
6.5. Packet Delivery Errors
6.6. Physical Impairments
6.7. Multi-UAVs
6.8. Channel Models
6.9. Flight Control
6.10. Energy Minimization
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Ant colony |
| AoI | Age of Information |
| AP | Affinity Propagation |
| A2G | Air-to-ground |
| BS | Base station |
| CH | Cluster head |
| CP | Clustering point |
| CSI | Channel state information |
| DC | Data center |
| DDPG | Deep Deterministic Policy Gradient |
| DP | Dynamic programming |
| DQN | Deep Q network |
| DRL | Deep reinforcement learning |
| EH | Energy harvesting |
| ESA | Expected sum AoI |
| FANETs | Flying Ad hoc Networks |
| GA | Genetic algorithm |
| GTSP | Generalized Traveling Salesman Problem |
| IoFT | Internet of Flying Things |
| IoT | Internet of Things |
| IoTD | Internet of Things Devices |
| KKT | Karush–Kuhn–Tucker |
| LoRA | Long Range |
| LOS | Line-of-sight |
| MAC | Medium Access Control |
| MDP | Markov Decision Process |
| ML | Machine learning |
| NWAoI | Normalized Weighted sum of Age of Information |
| QoS | Quality of Service |
| RF | Radio frequency |
| RIS | Re-configurable Intelligent Surface |
| RL | Reinforcement learning |
| SMDP | Semi-Markov Decision Process |
| SNR | Signal-to-noise ratio |
| UAV | Unmanned aerial vehicle |
| VDN | Value Decomposition Networks |
| WPT | Wireless power transfer |
| WSN | Wireless sensor networks |
References
- Sun, M.; Xu, X.; Qin, X.; Zhang, P. AoI-Energy-Aware UAV-assisted Data Collection for IoT Networks: A Deep Reinforcement Learning Method. IEEE Internet Things J. 2021, 8, 17275–17289. [Google Scholar] [CrossRef]
- Zhou, C.; He, H.; Yang, P.; Lyu, F.; Wu, W.; Cheng, N.; Shen, X. Deep RL-based trajectory planning for AoI minimization in UAV-assisted IoT. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–6. [Google Scholar]
- Tong, P.; Liu, J.; Wang, X.; Bai, B.; Dai, H. Deep reinforcement learning for efficient data collection in UAV-aided Internet of Things. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Ferdowsi, A.; Abd-Elmagid, M.A.; Saad, W.; Dhillon, H.S. Neural combinatorial deep reinforcement learning for age-optimal joint trajectory and scheduling design in UAV-assisted networks. IEEE J. Sel. Areas Commun. 2021, 39, 1250–1265. [Google Scholar] [CrossRef]
- Qin, Z.; Zhang, X.; Zhang, X.; Lu, B.; Liu, Z.; Guo, L. The UAV Trajectory Optimization for Data Collection from Time-Constrained IoT Devices: A Hierarchical Deep Q-Network Approach. Appl. Sci. 2022, 12, 2546. [Google Scholar] [CrossRef]
- Shi, L.; Zhang, X.; Xiang, X.; Zhou, Y.; Sun, S. Age of Information optimization with Heterogeneous UAVs based on Deep Reinforcement Learning. In Proceedings of the 2022 14th International Conference on Advanced Computational Intelligence (ICACI), Wuhan, China, 15–17 July 2022; pp. 239–245. [Google Scholar]
- Zhu, B.; Bedeer, E.; Nguyen, H.H.; Barton, R.; Gao, Z. UAV Trajectory Planning for AoI-Minimal Data Collection in UAV-Aided IoT Networks by Transformer. IEEE Trans. Wirel. Commun. 2022, 22, 1343–1358. [Google Scholar] [CrossRef]
- Samir, M.; Assi, C.; Sharafeddine, S.; Ghrayeb, A. Online Altitude Control and Scheduling Policy for Minimizing AoI in UAV-assisted IoT Wireless Networks. IEEE Trans. Mob. Comput. 2020, 21, 2493–2505. [Google Scholar] [CrossRef]
- Samir, M.; Elhattab, M.; Assi, C.; Sharafeddine, S.; Ghrayeb, A. Optimizing age of information through aerial reconfigurable intelligent surfaces: A deep reinforcement learning approach. IEEE Trans. Veh. Technol. 2021, 70, 3978–3983. [Google Scholar] [CrossRef]
- Chmaj, G.; Selvaraj, H. Distributed processing applications for UAV/drones: A survey. In Progress in Systems Engineering; Springer: Cham, Switzerland, 2015; pp. 449–454. [Google Scholar]
- Shah, B.; Kim, K.I. A survey on three-dimensional wireless ad hoc and sensor networks. Int. J. Distrib. Sens. Netw. 2014, 10, 616014. [Google Scholar] [CrossRef]
- Nigam, N. The multiple unmanned air vehicle persistent surveillance problem: A review. Machines 2014, 2, 13–72. [Google Scholar] [CrossRef] [Green Version]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in civil infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless sensor networks and multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the sky: Leveraging UAVs for disaster management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-enabled intelligent transportation systems for the smart city: Applications and challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Bacco, M.; Cassará, P.; Colucci, M.; Gotta, A.; Marchese, M.; Patrone, F. A survey on network architectures and applications for nanosat and UAV swarms. In Proceedings of the International Conference on Wireless and Satellite Systems, Nanjing, China, 17–18 September 2017; Springer: Cham, Switzerland, 2017; pp. 75–85. [Google Scholar]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Chenaru, O.; Ichim, L. A survey of collaborative UAV–WSN systems for efficient monitoring. Sensors 2019, 19, 4690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, L.; Marcano, N.J.H.; Jacobsen, R.H. A Survey on Multi-Unmanned Aerial Vehicle Communications for Autonomous Inspections. In Proceedings of the 2019 22nd Euromicro Conference on Digital System Design (DSD), Kallithea, Greece, 28–30 August 2019; pp. 580–587. [Google Scholar]
- Zhang, F.; Liu, H.; Ma, Z.; Yang, Y.; Wan, X. Study of UAV Application in Wireless Sensor Networks. In Proceedings of the 2020 3rd International Conference on Mechanical, Electronics, Computer, and Industrial Technology (MECnIT), Medan, Indonesia, 25–27 June 2020; pp. 343–348. [Google Scholar]
- Shakoor, S.; Kaleem, Z.; Baig, M.I.; Chughtai, O.; Duong, T.Q.; Nguyen, L.D. Role of UAVs in public safety communications: Energy efficiency perspective. IEEE Access 2019, 7, 140665–140679. [Google Scholar] [CrossRef]
- Okada, H. An overview of aerial wireless relay networks for emergency communications during large-scale disasters. IEICE Trans. Commun. 2020, 103, 1376–1384. [Google Scholar] [CrossRef]
- Noor, F.; Khan, M.A.; Al-Zahrani, A.; Ullah, I.; Al-Dhlan, K.A. A review on communications perspective of flying ad-hoc networks: Key enabling wireless technologies, applications, challenges and open research topics. Drones 2020, 4, 65. [Google Scholar] [CrossRef]
- Yang, X.; Fu, S.; Wu, B.; Zhang, M. A Survey of Key Issues in UAV Data Collection in the Internet of Things. In Proceedings of the 2020 IEEE International Conference on Dependable, Autonomic and Secure Computing, International Conference on Pervasive Intelligence and Computing, International Conference on Cloud and Big Data Computing, International Conference on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech), Falerna, Italy, 17–22 August 2020; pp. 410–413. [Google Scholar]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Ammoniaci, M.; Kartsiotis, S.P.; Perria, R.; Storchi, P. State of the Art of Monitoring Technologies and Data Processing for Precision Viticulture. Agriculture 2021, 11, 201. [Google Scholar] [CrossRef]
- Lambey, V.; Prasad, A. A review on air quality measurement using an unmanned aerial vehicle. Water Air Soil Pollut. 2021, 232, 1–32. [Google Scholar] [CrossRef]
- Zhou, F.; Hu, R.Q.; Li, Z.; Wang, Y. Mobile edge computing in unmanned aerial vehicle networks. IEEE Wirel. Commun. 2020, 27, 140–146. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Li, L.; Zhang, N.; Han, T.; Wang, S. Air-ground integrated mobile edge networks: A survey. IEEE Access 2020, 8, 125998–126018. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Ahanger, T.A.; Ibrahim, A. Softwarization of UAV networks: A survey of applications and future trends. IEEE Access 2020, 8, 98073–98125. [Google Scholar] [CrossRef]
- Shahzadi, R.; Ali, M.; Khan, H.Z.; Naeem, M. UAV assisted 5G and beyond wireless networks: A survey. J. Netw. Comput. Appl. 2021, 189, 103114. [Google Scholar] [CrossRef]
- Zaidi, S.; Atiquzzaman, M.; Calafate, C.T. Internet of Flying Things (IoFT): A survey. Comput. Commun. 2020, 165, 53–74. [Google Scholar] [CrossRef]
- Wang, H.; Sun, Q.; Wang, S. A survey on the optimisation of age of information in wireless networks. Int. J. Web Grid Serv. 2023, 19, 1–33. [Google Scholar] [CrossRef]
- Abbas, Q.; Hassan, S.A.; Qureshi, H.K.; Dev, K.; Jung, H. A comprehensive survey on age of information in massive IoT networks. Comput. Commun. 2022, 197, 199–213. [Google Scholar] [CrossRef]
- Yates, R.D.; Sun, Y.; Brown, D.R.; Kaul, S.K.; Modiano, E.; Ulukus, S. Age of information: An introduction and survey. IEEE J. Sel. Areas Commun. 2021, 39, 1183–1210. [Google Scholar] [CrossRef]
- Amodu, O.A.; Bukar, U.A.; Raja Mahmood, R.A.; Jarray, C.; Othman, M. Age of Information Minimization in UAV-aided Data Collection for Wsn and IoT Applications: A Systematic Review. Available online: https://ssrn.com/abstract=4416386 (accessed on 2 April 2023).
- Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Żywiołek, J. A comprehensive review of micro UAV charging techniques. Micromachines 2022, 13, 977. [Google Scholar] [CrossRef]
- Daud, S.M.S.M.; Yusof, M.Y.P.M.; Heo, C.C.; Khoo, L.S.; Singh, M.K.C.; Mahmood, M.S.; Nawawi, H. Applications of drone in disaster management: A scoping review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef] [PubMed]
- Pasha, J.; Elmi, Z.; Purkayastha, S.; Fathollahi-Fard, A.M.; Ge, Y.E.; Lau, Y.Y.; Dulebenets, M.A. The drone scheduling problem: A systematic state-of-the-art review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14224–14247. [Google Scholar] [CrossRef]
- Benarbia, T.; Kyamakya, K. A literature review of drone-based package delivery logistics systems and their implementation feasibility. Sustainability 2022, 14, 360. [Google Scholar] [CrossRef]
- Hafeez, A.; Husain, M.A.; Singh, S.; Chauhan, A.; Khan, M.T.; Kumar, N.; Chauhan, A.; Soni, S. Implementation of drone technology for farm monitoring & pesticide spraying: A review. Inf. Process. Agric. 2022; in press. [Google Scholar]
- Jiang, X.; Sheng, M.; Nan, Z.; Chengwen, X.; Weidang, L.; Xianbin, W. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2022, 35, 19–34. [Google Scholar] [CrossRef]
- Ait Saadi, A.; Soukane, A.; Meraihi, Y.; Benmessaoud Gabis, A.; Mirjalili, S.; Ramdane-Cherif, A. UAV path planning using optimization approaches: A survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K.; Ropelewska, E.; Gültekin, S.S. A comprehensive survey of the recent studies with UAV for precision agriculture in open fields and greenhouses. Appl. Sci. 2022, 12, 1047. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Hassan, J.; Alhartomi, M.A.; Shvetsova, S.V.; Sahal, R.; Hawbani, A. Computing in the sky: A survey on intelligent ubiquitous computing for uav-assisted 6g networks and industry 4.0/5.0. Drones 2022, 6, 177. [Google Scholar] [CrossRef]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.J.; Tiede, D.; Seifert, T. UAV-based forest health monitoring: A systematic review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Tsao, K.Y.; Girdler, T.; Vassilakis, V.G. A survey of cyber security threats and solutions for UAV communications and flying ad-hoc networks. Ad Hoc Netw. 2022, 133, 102894. [Google Scholar] [CrossRef]
- Fascista, A. Toward integrated large-scale environmental monitoring using WSN/UAV/Crowdsensing: A review of applications, signal processing, and future perspectives. Sensors 2022, 22, 1824. [Google Scholar] [CrossRef]
- Wei, Z.; Zhu, M.; Zhang, N.; Wang, L.; Zou, Y.; Meng, Z.; Wu, H.; Feng, Z. UAV-Assisted Data Collection for Internet of Things: A Survey. IEEE Internet Things J. 2022, 9, 15460–15483. [Google Scholar] [CrossRef]
- Parvaresh, N.; Kulhandjian, M.; Kulhandjian, H.; D’Amours, C.; Kantarci, B. A tutorial on AI-powered 3D deployment of drone base stations: State of the art, applications and challenges. Veh. Commun. 2022, 36, 100474. [Google Scholar] [CrossRef]
- Duarte, A.; Borralho, N.; Cabral, P.; Caetano, M. Recent advances in forest insect pests and diseases monitoring using UAV-based data: A systematic review. Forests 2022, 13, 911. [Google Scholar] [CrossRef]
- Chiper, F.L.; Martian, A.; Vladeanu, C.; Marghescu, I.; Craciunescu, R.; Fratu, O. Drone detection and defense systems: Survey and a software-defined radio-based solution. Sensors 2022, 22, 1453. [Google Scholar] [CrossRef] [PubMed]
- Basharat, M.; Naeem, M.; Qadir, Z.; Anpalagan, A. Resource optimization in UAV-assisted wireless networks—A comprehensive survey. Trans. Emerg. Telecommun. Technol. 2022, 33, e4464. [Google Scholar] [CrossRef]
- Elnabty, I.A.; Fahmy, Y.; Kafafy, M. A survey on UAV placement optimization for UAV-assisted communication in 5G and beyond networks. Phys. Commun. 2022, 51, 101564. [Google Scholar] [CrossRef]
- Nomikos, N.; Gkonis, P.K.; Bithas, P.S.; Trakadas, P. A survey on UAV-aided maritime communications: Deployment considerations, applications, and future challenges. IEEE Open J. Commun. Soc. 2022, 4, 56–78. [Google Scholar] [CrossRef]
- Jońca, J.; Pawnuk, M.; Bezyk, Y.; Arsen, A.; Sówka, I. Drone-Assisted Monitoring of Atmospheric Pollution—A Comprehensive Review. Sustainability 2022, 14, 11516. [Google Scholar] [CrossRef]
- Rachmawati, T.S.N.; Kim, S. Unmanned Aerial Vehicles (UAV) Integration with Digital Technologies toward Construction 4.0: A Systematic Literature Review. Sustainability 2022, 14, 5708. [Google Scholar] [CrossRef]
- Won, J.; Kim, D.Y.; Park, Y.I.; Lee, J.W. A survey on UAV placement and trajectory optimization in communication networks: From the perspective of air-to-ground channel models. ICT Express, 2022; in press. [Google Scholar] [CrossRef]
- Han, S.I. Survey on UAV Deployment and Trajectory in Wireless Communication Networks: Applications and Challenges. Information 2022, 13, 389. [Google Scholar] [CrossRef]
- Adil, M.; Jan, M.A.; Liu, Y.; Abulkasim, H.; Farouk, A.; Song, H. A Systematic Survey: Security Threats to UAV-Aided IoT Applications, Taxonomy, Current Challenges and Requirements With Future Research Directions. IEEE Trans. Intell. Transp. Syst. 2022, 24, 1437–1455. [Google Scholar] [CrossRef]
- Su, J.; Zhu, X.; Li, S.; Chen, W.H. AI meets UAVs: A survey on AI empowered UAV perception systems for precision agriculture. Neurocomputing 2022, 518, 242–270. [Google Scholar] [CrossRef]
- Mazaherifar, A.; Mostafavi, S. UAV placement and trajectory design optimization: A survey. Wirel. Pers. Commun. 2022, 124, 2191–2210. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.; Gao, R.; Lei, C.; Feng, W.; Ge, N.; Jin, S.; Quek, T.Q. Physical layer security for UAV communications: A comprehensive survey. China Commun. 2022, 19, 77–115. [Google Scholar] [CrossRef]
- Yang, Y.; Xiong, X.; Yan, Y. UAV Formation Trajectory Planning Algorithms: A Review. Drones 2023, 7, 62. [Google Scholar] [CrossRef]
- Raivi, A.M.; Huda, S.A.; Alam, M.M.; Moh, S. Drone Routing for Drone-Based Delivery Systems: A Review of Trajectory Planning, Charging, and Security. Sensors 2023, 23, 1463. [Google Scholar] [CrossRef]
- Aznoli, F.; Navimipour, N.J. Deployment strategies in the wireless sensor networks: Systematic literature review, classification, and current trends. Wirel. Pers. Commun. 2017, 95, 819–846. [Google Scholar] [CrossRef]
- Bukar, U.A.; Othman, M. Architectural Design, Improvement, and Challenges of Distributed Software-Defined Wireless Sensor Networks. Wirel. Pers. Commun. 2022, 122, 2395–2439. [Google Scholar] [CrossRef]
- Abbasi, A.A.; Abbasi, A.; Shamshirband, S.; Chronopoulos, A.T.; Persico, V.; Pescapè, A. Software-defined cloud computing: A systematic review on latest trends and developments. IEEE Access 2019, 7, 93294–93314. [Google Scholar] [CrossRef]
- Keshari, S.K.; Kansal, V.; Kumar, S. A systematic review of quality of services (QoS) in software defined networking (SDN). Wirel. Pers. Commun. 2021, 116, 2593–2614. [Google Scholar] [CrossRef]
- Patil, S.; Gokhale, P. Systematic Review of Resource Allocation Methods Using Scheduling for M2M (Machine to Machine Communication) in IoT Network. Secur. Issues Priv. Threat. Smart Ubiquitous Comput. 2021, 341, 213–224. [Google Scholar]
- Snyder, H. Literature review as a research methodology: An overview and guidelines. J. Bus. Res. 2019, 104, 333–339. [Google Scholar] [CrossRef]
- Cook, D.J.; Greengold, N.L.; Ellrodt, A.G.; Weingarten, S.R. The relation between systematic reviews and practice guidelines. Ann. Intern. Med. 1997, 127, 210–216. [Google Scholar] [CrossRef]
- Kitchenham, B.; Charters, S. Guidelines for Performing Systematic Literature Reviews in Software Engineering; Technical Report, EBSE Technical Report EBSE-2007-01, Ver. 2.3; Durham University: Durham, UK, 2007. [Google Scholar]
- Liao, Y.; Loures, E.d.F.R.; Deschamps, F. Industrial Internet of Things: A systematic literature review and insights. IEEE Internet Things J. 2018, 5, 4515–4525. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Bai, B.; Dai, H. Age-optimal trajectory planning for UAV-assisted data collection. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Virtual, 2–5 May 2018; pp. 553–558. [Google Scholar]
- Yi, M.; Wang, X.; Liu, J.; Zhang, Y.; Bai, B. Deep reinforcement learning for fresh data collection in UAV-assisted IoT networks. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 716–721. [Google Scholar]
- Abd-Elmagid, M.A.; Ferdowsi, A.; Dhillon, H.S.; Saad, W. Deep reinforcement learning for minimizing age-of-information in UAV-assisted networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Big Island, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Abd-Elmagid, M.A.; Dhillon, H.S. Average peak age-of-information minimization in UAV-assisted IoT networks. IEEE Trans. Veh. Technol. 2018, 68, 2003–2008. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Wang, L.; Fei, A. Minimizing packet expiration loss with path planning in UAV-assisted data sensing. IEEE Wirel. Commun. Lett. 2019, 8, 1520–1523. [Google Scholar] [CrossRef]
- Tong, P.; Liu, J.; Wang, X.; Bai, B.; Dai, H. UAV-enabled age-optimal data collection in wireless sensor networks. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Hu, H.; Xiong, K.; Qu, G.; Ni, Q.; Fan, P.; Letaief, K.B. AoI-minimal trajectory planning and data collection in UAV-assisted wireless powered IoT networks. IEEE Internet Things J. 2020, 8, 1211–1223. [Google Scholar] [CrossRef]
- Changizi, A.; Emadi, M.J. Age-optimal path planning for finite-battery UAV-assisted data dissemination in IoT networks. IET Commun. 2021, 15, 1287–1296. [Google Scholar] [CrossRef]
- Ahani, G.; Yuan, D.; Zhao, Y. Age-optimal UAV scheduling for data collection with battery recharging. IEEE Commun. Lett. 2020, 25, 1254–1258. [Google Scholar] [CrossRef]
- Yuhua, Z.; Xiangdong, J.; Yuxin, W.; Shengnan, C. A Research on Age of Information Minimization Scheme of Wireless Sensor Network Assisted by UAV. In Proceedings of the 2021 6th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 9–11 April 2021; pp. 1149–1152. [Google Scholar]
- Liu, J.; Tong, P.; Wang, X.; Bai, B.; Dai, H. UAV-Aided Data Collection for Information Freshness in Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2020, 20, 2368–2382. [Google Scholar] [CrossRef]
- Zeng, X.; Ma, F.; Chen, T.; Chen, X.; Wang, X. Age-Optimal UAV Trajectory Planning for Information Gathering with Energy Constraints. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC), Xiamen, China, 28–30 July 2020; pp. 881–886. [Google Scholar]
- Mao, C.; Liu, J.; Xie, L. Multi-UAV Aided Data Collection for Age Minimization in Wireless Sensor Networks. In Proceedings of the 2020 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 21–23 October 2020; pp. 80–85. [Google Scholar]
- Zhang, N.; Liu, J.; Xie, L.; Tong, P. A Deep Reinforcement Learning Approach to Energy-harvesting UAV-aided Data Collection. In Proceedings of the 2020 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 21–23 October 2020; pp. 93–98. [Google Scholar]
- Jia, Z.; Qin, X.; Wang, Z.; Liu, B. Age-based path planning and data acquisition in UAV-assisted IoT networks. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Chen, H.; Qin, X.; Li, Y.; Ma, N. Energy-aware Path Planning for Obtaining Fresh Updates in UAV-IoT MEC systems. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 1791–1796. [Google Scholar]
- Tran, D.H.; Nguyen, V.D.; Chatzinotas, S.; Vu, T.X.; Ottersten, B. UAV relay-assisted emergency communications in IoT networks: Resource allocation and trajectory optimization. IEEE Trans. Wirel. Commun. 2021, 21, 1621–1637. [Google Scholar] [CrossRef]
- Augello, A.; Gaglio, S.; Lo Re, G.; Peri, D. Time-Constrained Node Visit Planning for Collaborative UAV–WSN Distributed Applications. Sensors 2022, 22, 5298. [Google Scholar] [CrossRef]
- Han, R.; Wang, J.; Bai, L.; Liu, J.; Choi, J. Age of Information and Performance Analysis for UAV-Aided IoT Systems. IEEE Internet Things J. 2021, 8, 14447–14457. [Google Scholar] [CrossRef]
- Liu, K.; Zheng, J. UAV Trajectory Optimization for Time-Constrained Data Collection in UAV-Enabled Environmental Monitoring Systems. IEEE Internet Things J. 2022, 9, 24300–24314. [Google Scholar] [CrossRef]
- Li, X.; Yin, B.; Yan, J.; Zhang, X.; Wei, R. Joint Power Control and UAV Trajectory Design for Information Freshness via Deep Reinforcement Learning. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference:(VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar]
- Oubbati, O.S.; Atiquzzaman, M.; Lim, H.; Rachedi, A.; Lakas, A. Synchronizing uav teams for timely data collection and energy transfer by deep reinforcement learning. IEEE Trans. Veh. Technol. 2022, 71, 6682–6697. [Google Scholar] [CrossRef]
- Liu, C.; Guo, Y.; Li, N.; Song, X. AoI-Minimal Task Assignment and Trajectory Optimization in Multi-UAV-Assisted IoT Networks. IEEE Internet Things J. 2022, 9, 21777–21791. [Google Scholar] [CrossRef]
- Dang, Q.; Cui, Q.; Gong, Z.; Zhang, X.; Huang, X.; Tao, X. AoI Oriented UAV Trajectory Planning in Wireless Powered IoT Networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 884–889. [Google Scholar]
- Fan, X.; Liu, M.; Chen, Y.; Sun, S.; Li, Z. RIS-Assisted UAV for Fresh Data Collection in 3D Urban Environments: A Deep Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2022, 72, 632–647. [Google Scholar] [CrossRef]
- Lu, X.; Yang, W.; Yan, S.; Li, Z.; Ng, D.W.K. Covertness and Timeliness of Data Collection in UAV-Aided Wireless-Powered IoT. IEEE Internet Things J. 2021, 9, 12573–12587. [Google Scholar] [CrossRef]
- Li, Z.; Tong, P.; Liu, J.; Wang, X.; Xie, L.; Dai, H. Learning-based Data Gathering for Information Freshness in UAV-assisted IoT Networks. IEEE Internet Things J. 2022, 10, 2557–2573. [Google Scholar] [CrossRef]
- Zhang, X.; Luo, W.; Shen, Y.; Wang, S. Average AoI Minimization in UAV-Assisted IoT Backscatter Communication Systems with Updated Information. In Proceedings of the 2021 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/IOP/SCI), Atlanta, GA, USA, 18–21 October 2021; pp. 123–130. [Google Scholar]
- Kaul, S.; Yates, R.; Gruteser, M. Real-time status: How often should one update? In Proceedings of the 2012 IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 2731–2735. [Google Scholar]
- Pogaku, A.C.; Do, D.T.; Lee, B.M.; Nguyen, N.D. UAV-Assisted RIS for Future Wireless Communications: A Survey on Optimization and Performance Analysis. IEEE Access 2022, 10, 16320–16336. [Google Scholar] [CrossRef]
- Shakeri, R.; Al-Garadi, M.A.; Badawy, A.; Mohamed, A.; Khattab, T.; Al-Ali, A.K.; Harras, K.A.; Guizani, M. Design challenges of multi-UAV systems in cyber-physical applications: A comprehensive survey and future directions. IEEE Commun. Surv. Tutor. 2019, 21, 3340–3385. [Google Scholar] [CrossRef] [Green Version]
















| Ref | Aspect | Summary |
|---|---|---|
| [8] | Altitude scheduling | Joint study of dynamic UAV altitude control and scheduling policy in a UAV-assisted wireless IoT network. |
| [9] | Altitude optimization | Optimization of RIS configuration for AoI minimization in a network with UAV altitude constraints. |
| [5] | Trajectory and energy management | AoI minimization in a scenario where UAVs return to the ground control station to be recharged. |
| [6] | Trajectory and energy management | AoI optimization with UAVs possessing varying energy capacities which introduces some degree of heterogeneity. |
| [84,89] | SN association | Design of sensor node association and trajectory planning for UAV-assisted data collection. |
| [4,81] | Trajectory and scheduling | Optimize the flight path of a UAV and schedule updates of the ground nodes’status. |
| [2] | UAV-IoTD association | The UAV trajectory planning for maintaining information freshness in IoT. |
| [3,105] | Node sampling policy | The UAV trajectory planning for maintaining information freshness in IoT. |
| [87] | Scheduling and energy management | Age-optimal UAV scheduling with battery recharging. |
| [105] | Sampling policy | Trajectory design of UAV was created before the UAV’s flight and not in real-time. |
| [7,80,82,92] | Scheduling | Ground node transmissions of status update packets are scheduled |
| [86] | Mode selection | Framework where a battery-limited UAV flies in multiple turns. |
| [1] | Bandwidth allocation | UAV-assisted energy-aware data collection for a group of IoT devices. |
| [106] | Data collection time | Joint optimization of UAV trajectory, transmit power, and data collection time from each sensor on the backscatter IoT architecture |
| [91] | SN-CP association | Cooperative framework for energy-constrained multi-UAV data collection for time-sensitive WSNs. |
| Aspect | Considered Factors | References | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [1] | [91] | [92] | [90] | [87] | [85] | [81] | [2] | [80] | [83] | [84] | [86] | [89] | [9] | [4] | ||
| Energy consumption | Number of SNs visited | ✓ | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | • |
| Nature of application | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | • | • | |
| UAV cooperation | • | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | • | |
| Energy level | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | • | • | |
| Flight time | • | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | • | |
| Velocity control | • | • | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | |
| Charging optimization | • | • | ✓ | ✓ | ✓ | ✓ | • | • | • | • | • | • | • | • | • | |
| Choice and order of visited nodes | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | • | • | |
| Scheduling policy of UAV | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | • | • | |
| UAV trajectory | UAV flight trajectory | • | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | ✓ |
| UAV flight time | ✓ | • | • | • | • | • | • | • | • | ✓ | ✓ | • | • | • | • | |
| Scheduling of ground nodes | • | • | • | • | • | • | ✓ | • | • | • | ✓ | • | • | • | • | |
| Flight trajectory types | ✓ | • | • | ✓ | • | • | • | • | • | ✓ | • | • | • | • | • | |
| QoS metrics | ✓ | • | • | • | • | • | • | ✓ | ✓ | • | • | • | • | • | • | |
| Flight trajectory model | • | • | • | • | • | • | • | • | • | • | ✓ | ✓ | • | • | • | |
| Service time allocation | • | • | • | • | • | ✓ | • | • | • | • | • | ✓ | • | • | • | |
| UAV connection methods | ✓ | ✓ | • | • | • | • | • | ✓ | • | • | ✓ | • | • | • | • | |
| Scheduling | Scheduling policies (random, greedy, distance-based) | ✓ | ✓ | • | • | • | • | • | • | • | • | • | ✓ | • | • | ✓ |
| Scheduling of IoTDs | ✓ | • | • | • | • | • | • | • | • | • | ✓ | • | • | ✓ | • | |
| Scheduling using machine learning | ✓ | • | • | • | • | • | • | • | • | • | • | • | • | ✓ | • | |
| Scheduling packets | ✓ | • | • | • | • | • | • | • | • | • | • | ✓ | • | • | • | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amodu, O.A.; Nordin, R.; Jarray, C.; Bukar, U.A.; Raja Mahmood, R.A.; Othman, M. A Survey on the Design Aspects and Opportunities in Age-Aware UAV-Aided Data Collection for Sensor Networks and Internet of Things Applications. Drones 2023, 7, 260. https://doi.org/10.3390/drones7040260
Amodu OA, Nordin R, Jarray C, Bukar UA, Raja Mahmood RA, Othman M. A Survey on the Design Aspects and Opportunities in Age-Aware UAV-Aided Data Collection for Sensor Networks and Internet of Things Applications. Drones. 2023; 7(4):260. https://doi.org/10.3390/drones7040260
Chicago/Turabian StyleAmodu, Oluwatosin Ahmed, Rosdiadee Nordin, Chedia Jarray, Umar Ali Bukar, Raja Azlina Raja Mahmood, and Mohamed Othman. 2023. "A Survey on the Design Aspects and Opportunities in Age-Aware UAV-Aided Data Collection for Sensor Networks and Internet of Things Applications" Drones 7, no. 4: 260. https://doi.org/10.3390/drones7040260
APA StyleAmodu, O. A., Nordin, R., Jarray, C., Bukar, U. A., Raja Mahmood, R. A., & Othman, M. (2023). A Survey on the Design Aspects and Opportunities in Age-Aware UAV-Aided Data Collection for Sensor Networks and Internet of Things Applications. Drones, 7(4), 260. https://doi.org/10.3390/drones7040260