
Multi-Level Hazard Detection Using a UAV-Mounted Multi-Sensor for Levee Inspection

Abstract
:1. Introduction
- (1)
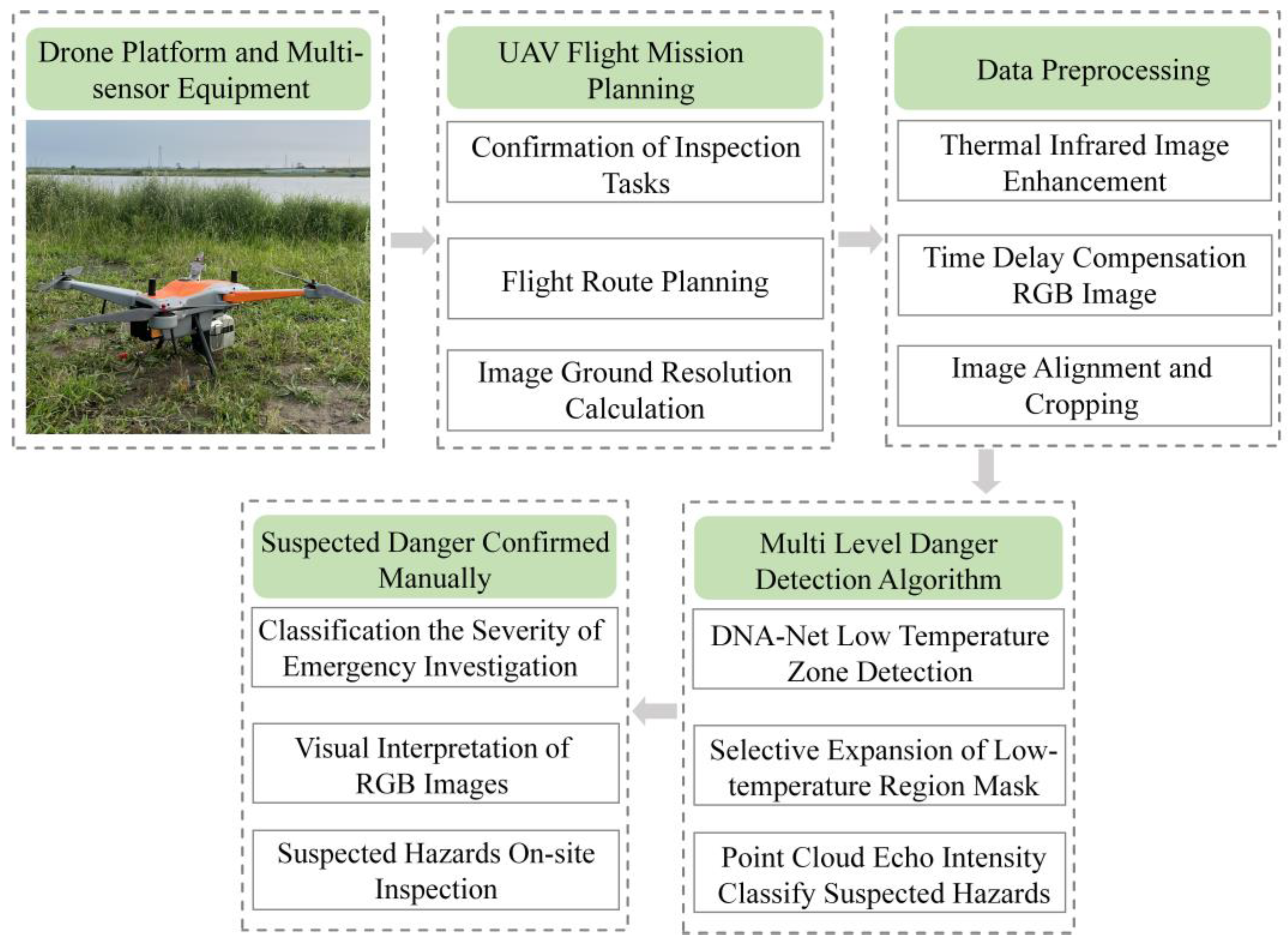
- We developed a multi-sensor integrated drone system tailored towards levee engineering hazard inspection. On the basis of multi-sensor time synchronization, external parameter calibration between RGB and thermal infrared cameras is achieved, ultimately unifying multi-source data within the same spatiotemporal framework. Additionally, the temperature resolution capability of the thermal infrared camera at various drone flight altitudes was examined to ensure the effectiveness of data collection.
- (2)
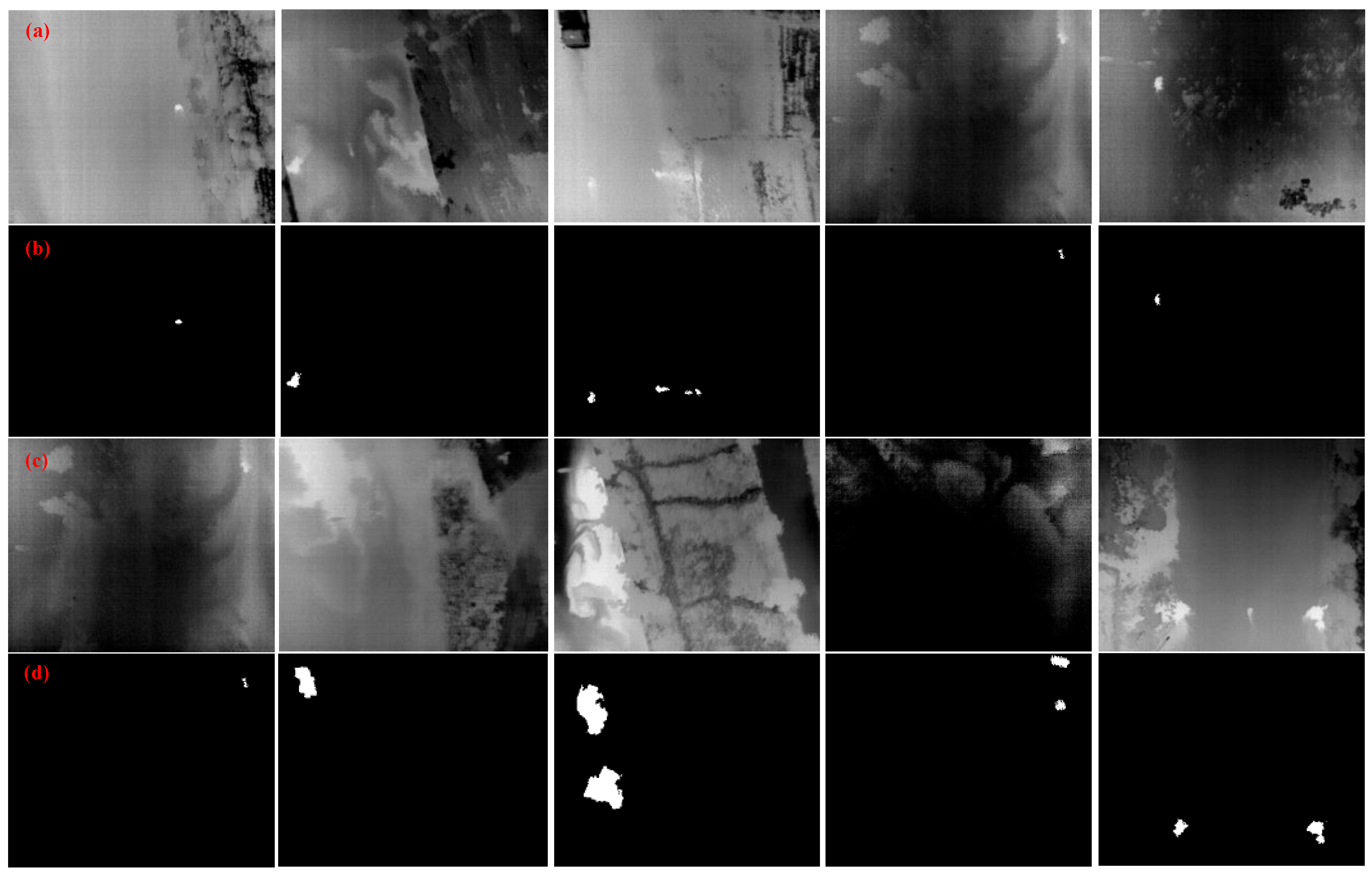
- We annotated and constructed a dataset containing 739 sets of low-temperature targets in thermal infrared images, and applied the trained network to detect low-temperature areas in thermal infrared images. Subsequently, the echo intensity of the LiDAR point cloud data was used to differentiate between water bodies, and assess the potential danger level of suspected hazards. Finally, a visual interpretation of the suspected hazard areas was conducted using RGB images, further enhancing operational efficiency.
- (3)
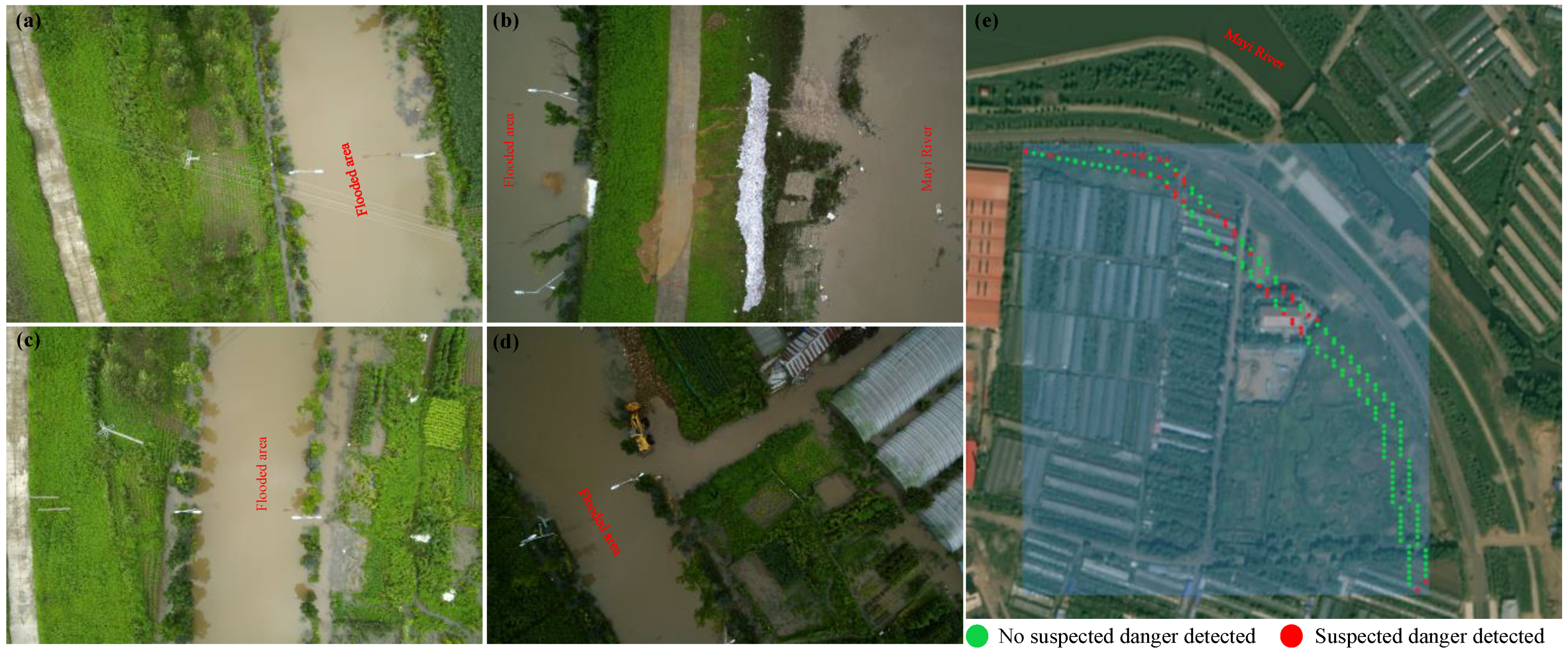
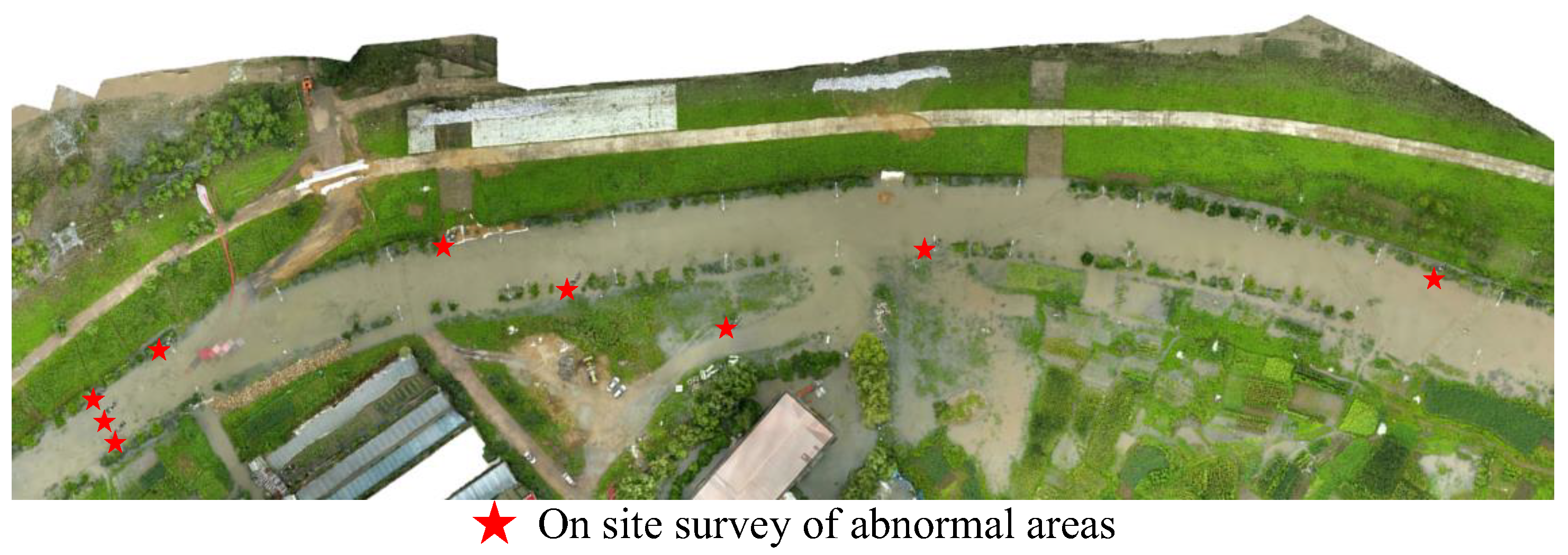
- We applied the multi-sensor integrated drone system and the multi-level suspected hazard detection algorithm in the field during heavy rain in Heilongjiang Province, China. We tested the applicability of the equipment and the effectiveness of multi-level detection methods at the disaster site. Practice has proven that the approach can provide robust support for the prevention and handling of potential hazards and risks.
2. Related Levee Monitoring Methods
3. Materials and Methods
3.1. Sensors
3.2. Multi-Sensor Integrated Equipment Based on UAV Platform
3.2.1. Time Synchronization
3.2.2. Spatial Reference Standardization
3.2.3. Thermal Infrared Camera Temperature Resolution
3.3. Data Preprocessing
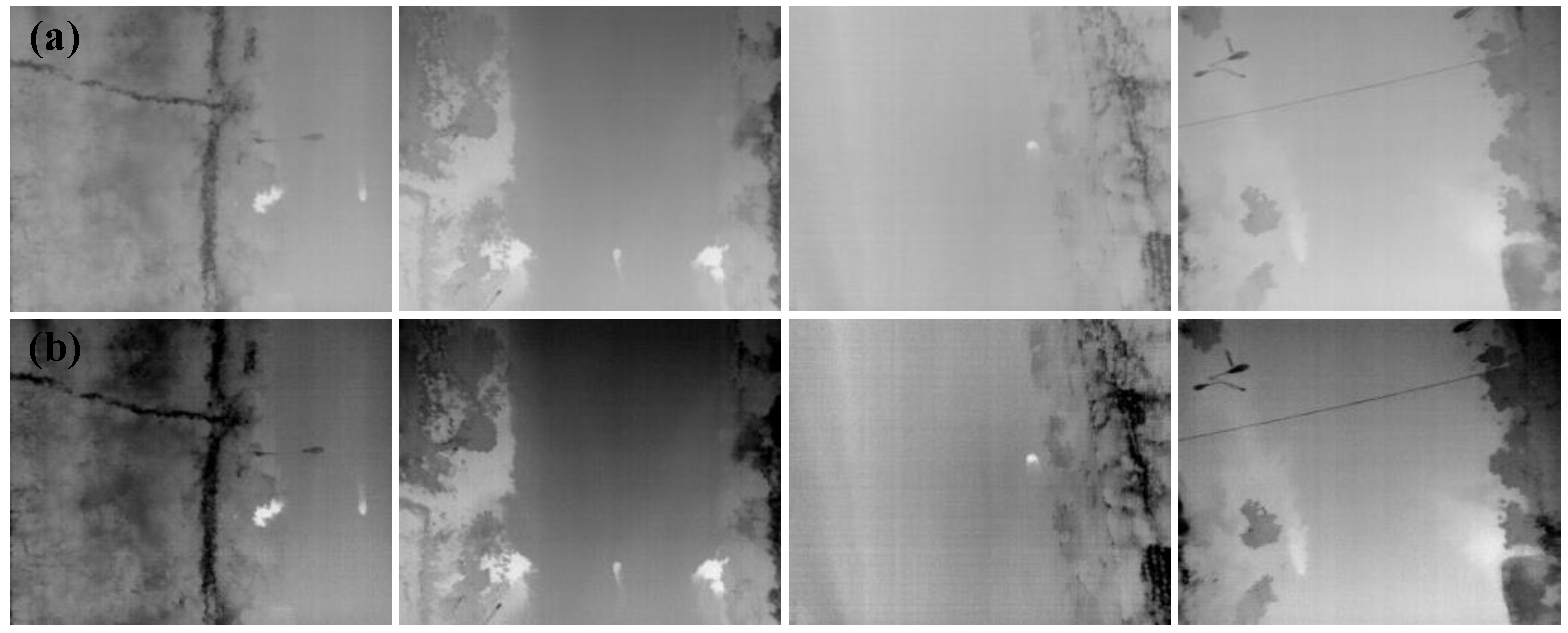
3.3.1. Infrared Image Enhancement
3.3.2. Alignment of Thermal Infrared, RGB and Point Cloud Images
3.4. Multi-Level Suspected Hazard Detection
4. System Implementation and Performance Analysis
4.1. Infrared Image Enhancement
4.2. Thermal Infrared Camera Temperature Resolution Test Results
4.3. Data Preprocessing
4.3.1. Infrared Image Enhancement
4.3.2. Alignment of Thermal Infrared, RGB and Point Cloud Images
4.4. Multi-Level Suspected Hazard Detection
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhong, Q.; Wang, L.; Chen, S. Breaches of embankment and landslide dams-State of the art review. Earth-Sci. Rev. 2021, 216, 103597. [Google Scholar] [CrossRef]
- Douglas, K.J.; Fell, R.; Peirson, W.L. Experimental investigation of global backward erosion and suffusion of soils in embankment dams. Can. Geotech. J. 2019, 56, 789–807. [Google Scholar] [CrossRef]
- Shin, S.; Park, S.; Kim, J.H. Time-lapse electrical resistivity tomography characterization for piping detection in earthen dam model of a sandbox. J. Appl. Geophys. 2019, 170, 103834. [Google Scholar] [CrossRef]
- Ahmed, A.A.A.; Joudah, A.A. Review About Incidents in Dams and Dike Behaviours Induced by Internal Erosion. Int. J. Eng. Technol. 2021, 8, 1057–1513. [Google Scholar]
- Gao, F.; Luo, C. Flow-pipe-seepage coupling analysis of spanning initiation of a partially-embedded pipeline. J. Hydrodyn. Ser. B 2010, 22, 478–487. [Google Scholar] [CrossRef]
- Luo, J.; Zhang, Q.; Li, L. Monitoring and characterizing the deformation of an earth dam in Guangxi Province, China. Eng. Geol. 2019, 248, 50–60. [Google Scholar] [CrossRef]
- Utili, S.; Castellanza, R.; Galli, A. Novel approach for health monitoring of earthen embankments. J. Geotech. Geoenviron. 2015, 141, 04014111. [Google Scholar] [CrossRef]
- Yang, B.; Ali, F.; Zhou, B. A novel approach of efficient 3D reconstruction for real scene using unmanned aerial vehicle oblique photogrammetry with five cameras. Comput. Electr. Eng. 2022, 99, 107804. [Google Scholar] [CrossRef]
- Milella, A.; Reina, G.; Nielsen, M. A multi-sensor robotic platform for ground mapping and estimation beyond the visible spectrum. Precis. Agric. 2019, 20, 423–444. [Google Scholar] [CrossRef]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS J. Photogramm. 2012, 68, 121–134. [Google Scholar] [CrossRef]
- Talha, M.; Stolkin, R. Particle filter tracking of camouflaged targets by adaptive fusion of thermal and visible spectra camera data. IEEE Sens. J. 2013, 14, 159–166. [Google Scholar] [CrossRef]
- Adamo, N.; Al-Ansari, N.; Sissakian, V. Dam safety problems related to seepage. J. Earth Sci. Geotech. Eng. 2020, 10, 191–239. [Google Scholar]
- Li, B.; Xiao, C.; Wang, L. Dense nested attention network for infrared small target detection. IEEE Trans. Image Process. 2022, 32, 1745–1758. [Google Scholar] [CrossRef] [PubMed]
- Höfle, B.; Vetter, M.; Pfeifer, N. Water surface mapping from airborne laser scanning using signal intensity and elevation data. Earth Surf. Process. Landf. 2009, 34, 1635–1649. [Google Scholar] [CrossRef]
- Rocchi, I.; Gragnano, C.G.; Govoni, L. Assessing the performance of a versatile and affordable geotechnical monitoring system for river embankments. Phys. Chem. Earth Parts A/B/C 2020, 117, 102872. [Google Scholar] [CrossRef]
- Rehamnia, I.; Benlaoukli, B.; Jamei, M. Simulation of seepage flow through embankment dam by using a novel extended Kalman filter based neural network paradigm: Case study of Fontaine Gazelles Dam, Algeria. Measurement 2021, 176, 109219. [Google Scholar] [CrossRef]
- Sjödahl, P.; Dahlin, T.; Johansson, S. Embankment dam seepage evaluation from resistivity monitoring data. Near Surf. Geophys. 2009, 7, 463–474. [Google Scholar] [CrossRef]
- Di Prinzio, M.; Bittelli, M.; Castellarin, A. Application of GPR to the monitoring of river embankments. J. Appl. Geophys. 2010, 71, 53–61. [Google Scholar] [CrossRef]
- Munawar, H.S.; Hammad, A.W.A.; Waller, S.T. Remote sensing methods for flood prediction: A review. Sensors 2022, 22, 960. [Google Scholar] [CrossRef]
- Rahman, M.S.; Di, L. The state of the art of spaceborne remote sensing in flood management. Nat. Hazards 2017, 85, 1223–1248. [Google Scholar] [CrossRef]
- Lendering, K.T.; Jonkman, S.N.; Kok, M. Effectiveness of emergency measures for flood prevention. J. Flood Risk Manag. 2016, 9, 320–334. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [PubMed]
- Eling, C.; Zeimetz, P.; Kuhlmann, H. Development of an instantaneous GNSS/MEMS attitude determination system. GPS Solut. 2013, 17, 129–138. [Google Scholar] [CrossRef]
- Thomas, H. Some like it hot: The impact of next generation FLIR Systems thermal cameras on archaeological thermography. Archaeol. Prospect. 2018, 25, 81–87. [Google Scholar] [CrossRef]
- Tsallis, C.; Barreto, F.C.S.; Loh, E.D. Generalization of the Planck radiation law and application to the cosmic microwave background radiation. Phys. Rev. E 1995, 52, 1447. [Google Scholar] [CrossRef] [PubMed]
- Manolakis, D.; Pieper, M.; Truslow, E. Longwave infrared hyperspectral imaging: Principles, progress, and challenges. IEEE Geosci. Remote Sens. Mag. 2019, 7, 72–100. [Google Scholar] [CrossRef]
- Bartmiński, P.; Siłuch, M.; Kociuba, W. The Effectiveness of a UAV-Based LiDAR Survey to Develop Digital Terrain Models and Topographic Texture Analyses. Sensors 2023, 23, 6415. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, Y.; Nie, K. Extracting building areas from photogrammetric DSM and DOM by automatically selecting training samples from historical DLG data. ISPRS Int. J. Geo-Inf. 2020, 9, 18. [Google Scholar] [CrossRef]
- Liu, Y.; You, H.; Tang, X. Study on Individual Tree Segmentation of Different Tree Species Using Different Segmentation Algorithms Based on 3D UAV Data. Forests 2023, 14, 1327. [Google Scholar] [CrossRef]
- Musa, A.; Gunasekaran, A.; Yusuf, Y. Embedded devices for supply chain applications: Towards hardware integration of disparate technologies. Expert Syst. Appl. 2014, 41, 137–155. [Google Scholar] [CrossRef]
- Hu, C.; He, H.; Jiang, H. Fixed/preassigned-time synchronization of complex networks via improving fixed-time stability. IEEE Trans. Cybern. 2020, 51, 2882–2892. [Google Scholar] [CrossRef]
- Fu, T.; Yu, H.; Yang, W. Targetless extrinsic calibration of stereo, thermal, and laser sensors in structured environments. IEEE Trans. Instrum. Meas. 2022, 71, 5021511. [Google Scholar] [CrossRef]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. Superpoint: Self-supervised interest point detection and description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 224–236. [Google Scholar]
- Wei, T.; Patel, Y.; Shekhovtsov, A. Generalized differentiable RANSAC. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 1–6 October 2023; pp. 17649–17660. [Google Scholar]
- Yang, C.C. Image enhancement by modified contrast-stretching manipulation. Opt. Laser Technol. 2006, 38, 196–201. [Google Scholar] [CrossRef]
- Liu, C.; Sui, X.; Gu, G. Shutterless non-uniformity correction for the long-term stability of an uncooled long-wave infrared camera. Meas. Sci. Technol. 2018, 29, 025402. [Google Scholar] [CrossRef]
- Kuenzer, C.; Dech, S. Thermal infrared remote sensing: Sensors, methods, applications. Photogramm. Eng. Remote Sens. 2015, 81, 359–360. [Google Scholar]
- Zhao, M.; Li, W.; Li, L. Single-frame infrared small-target detection: A survey. IEEE Geosci. Remote Sens. Mag. 2022, 10, 87–119. [Google Scholar] [CrossRef]
- Gao, C.; Meng, D.; Yang, Y. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, R.; Yang, Y. ISNet: Shape matters for infrared small target detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 877–886. [Google Scholar]
- Hou, Q.; Zhang, L.; Tan, F.; Xi, Y.; Zheng, H.; Li, N. ISTDU-Net: Infrared Small-Target Detection U-Net. IEEE Geosci. Remote Sens. Lett. 2022, 19, 7506205. [Google Scholar] [CrossRef]
- Wu, S.; Xiao, C.; Wang, L. RepISD-Net: Learning Efficient Infrared Small-target Detection Network via Structural Re-parameterization. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5622712. [Google Scholar] [CrossRef]
- Duchi, J.; Hazan, E.; Singer, Y. Adaptive subgradient methods for online learning and stochastic optimization. J. Mach. Learn. Res. 2011, 12, 2121–2159. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value |
|---|---|
| Thermal imager | Uncooled Vanadium Oxide (VOx) Microbolometer for Infrared Radiation Detection |
| Camera lens | 19 mm (focal length); 32° × 26° (field of view, FoV) |
| Resolution | 640 × 512 |
| Pixel Size | 17 μm |
| Wavelength Range | 7.5–13.5 μm |
| Size | 57.4 mm × 44.45 mm (including the lens) |
| Temperature Measurement Accuracy/ Radiation Measurement Accuracy | ±5 °C or ±5% of the reading |
| Operating Temperature Range | −20 °C to +50 °C |
| Thermal Sensitivity | <50 mK (Capable of precisely measuring temperature differences less than 50 mK) |
| Parameter Name | Parameter Value |
|---|---|
| Weight | 950 g |
| Field of View | 70.4° (Horizontal) × 4.5° (Vertical) |
| Ranging | 450 m (80% reflectivity, 0 klx) 190 m (10% reflectivity, 100 klx) |
| Ranging Accuracy | 2 cm |
| Protection Level | ≥IP64 |
| Point Frequency | 2.4 million points/s |
| Echo Count | Supports triple echo 240,000 points/second (single echo) 480,000 points/second (double echo) 720,000 points/second (triple echo) |
| Size | 128 mm × 68 mm × 140 mm |
| Parameter Name | Parameter Value |
|---|---|
| Resolution | 6252 × 4168 |
| Field of View | 72.3° × 52.2° |
| The Minimum Photographing Interval | 0.8 s |
| Focal Length | 16 mm |
| Parameter Name | Parameter Value |
|---|---|
| Size | 1300 mm × 750 × 330 mm |
| Maximum Takeoff Weight | 10 kg |
| Payload Weight | 3 kg |
| Aircraft Wind Resistance | ≥Level 7 |
| Protection Level | ≥IP55 |
| Flight Duration | Operating time with AlphaAir 450 mounted: 50 min; Empty load operation: 80 min |
| Single-flight Range | >5 km |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, S.; Yan, L.; Xie, H.; Chen, C.; Zhang, X.; Gao, L.; Zhang, R. Multi-Level Hazard Detection Using a UAV-Mounted Multi-Sensor for Levee Inspection. Drones 2024, 8, 90. https://doi.org/10.3390/drones8030090
Su S, Yan L, Xie H, Chen C, Zhang X, Gao L, Zhang R. Multi-Level Hazard Detection Using a UAV-Mounted Multi-Sensor for Levee Inspection. Drones. 2024; 8(3):90. https://doi.org/10.3390/drones8030090
Chicago/Turabian StyleSu, Shan, Li Yan, Hong Xie, Changjun Chen, Xiong Zhang, Lyuzhou Gao, and Rongling Zhang. 2024. "Multi-Level Hazard Detection Using a UAV-Mounted Multi-Sensor for Levee Inspection" Drones 8, no. 3: 90. https://doi.org/10.3390/drones8030090
APA StyleSu, S., Yan, L., Xie, H., Chen, C., Zhang, X., Gao, L., & Zhang, R. (2024). Multi-Level Hazard Detection Using a UAV-Mounted Multi-Sensor for Levee Inspection. Drones, 8(3), 90. https://doi.org/10.3390/drones8030090