
Influence of VF and SOR-Filtering Methods on Tree Height Inversion Using Unmanned Aerial Vehicle LiDAR Data

 ,
, 
 and
and 
Abstract
:1. Introduction
2. Materials and Methods
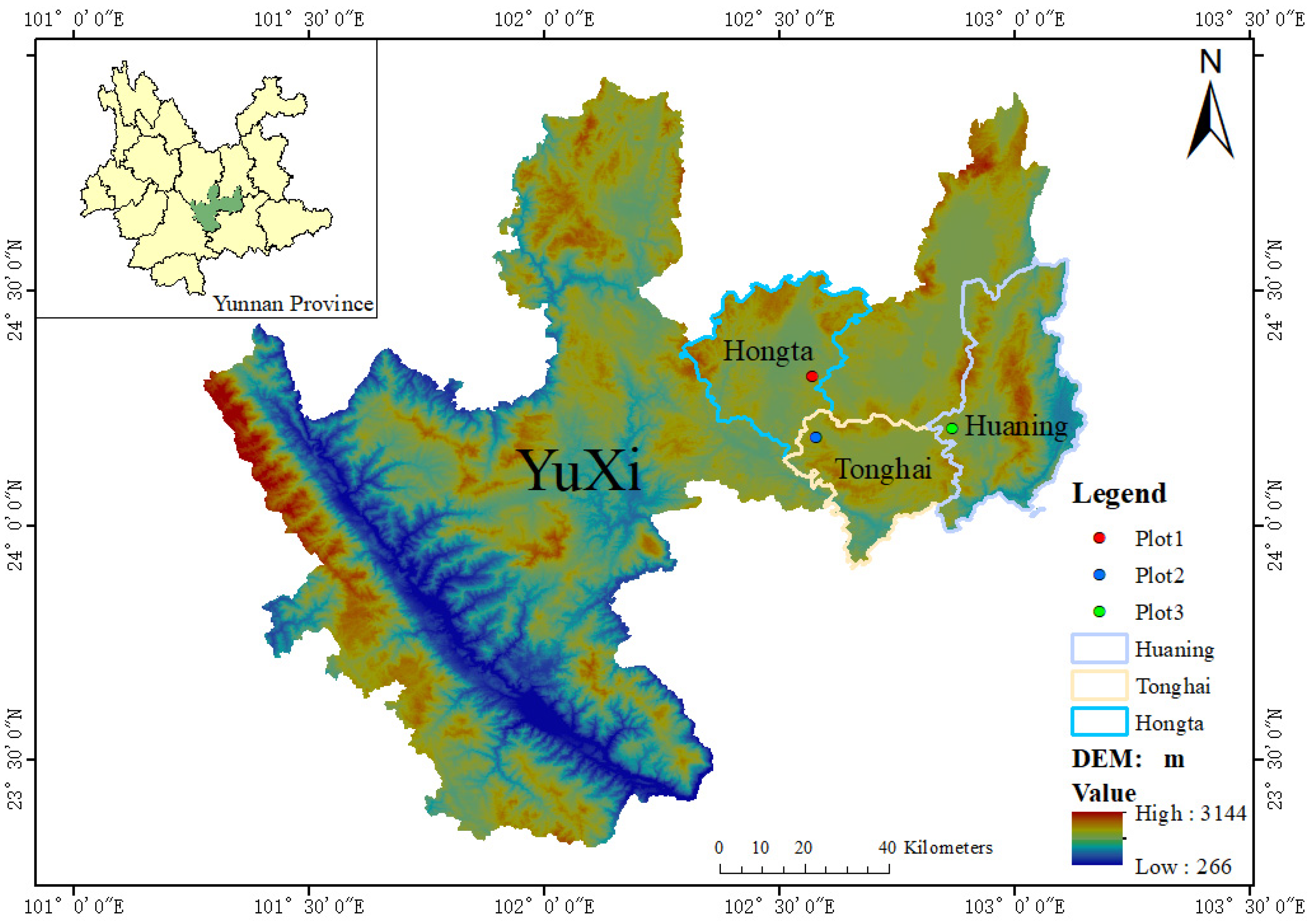
2.1. Study Area
2.2. Field Data
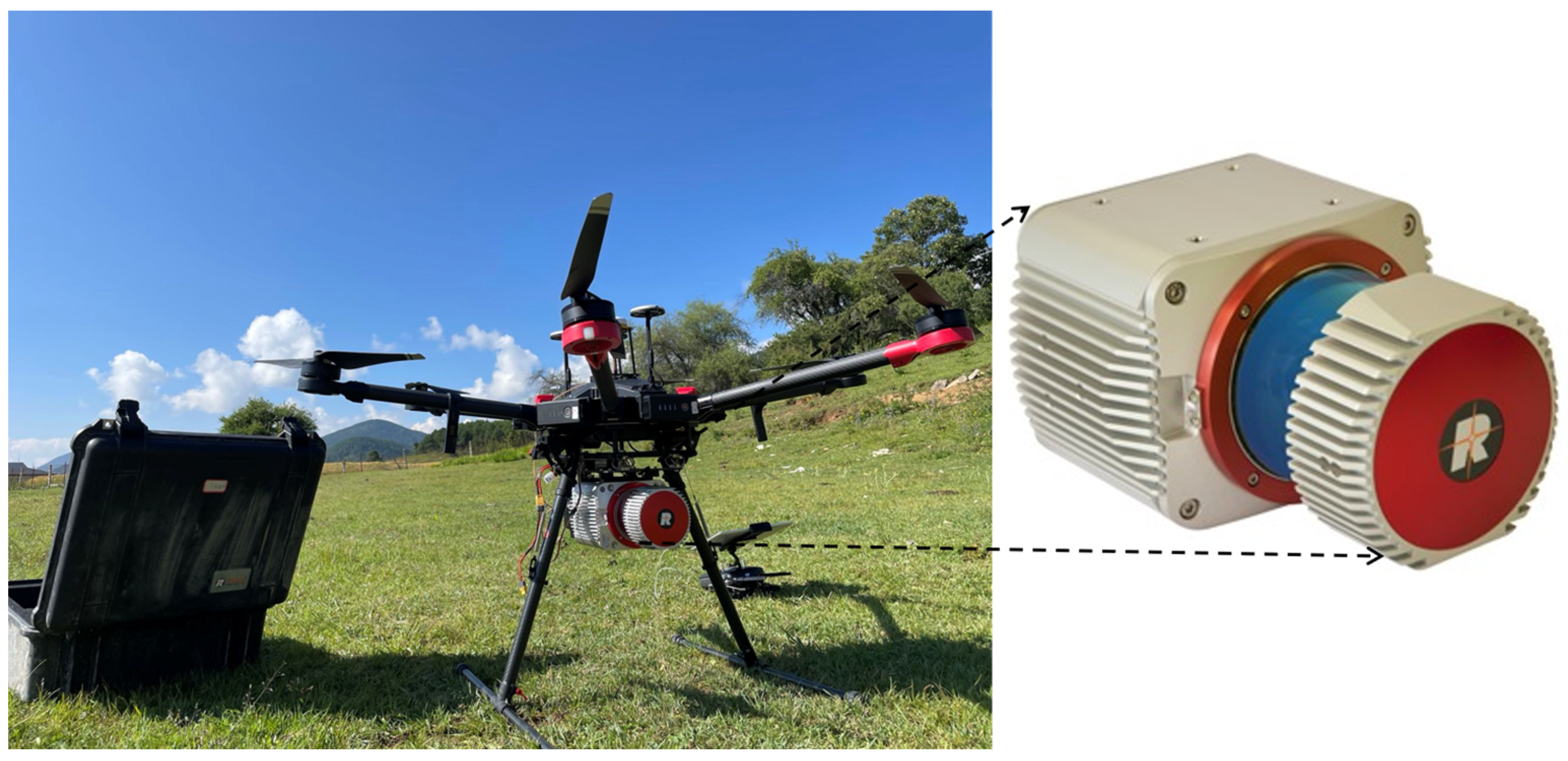
2.3. UAV-LiDAR Data
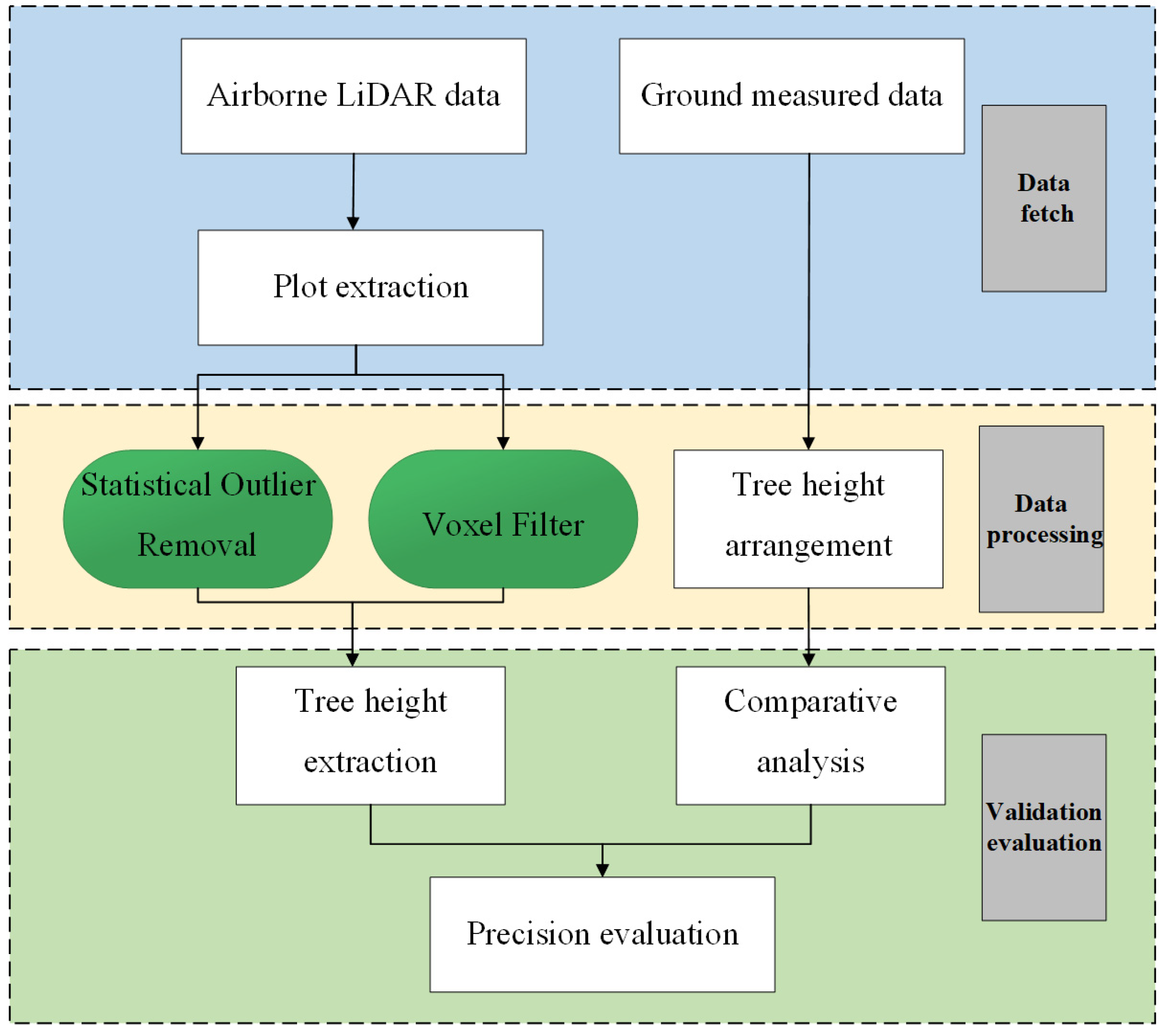
2.4. Methods
2.4.1. SOR Algorithm
2.4.2. VF Algorithm
2.4.3. Individual Tree Height Inversion
3. Results
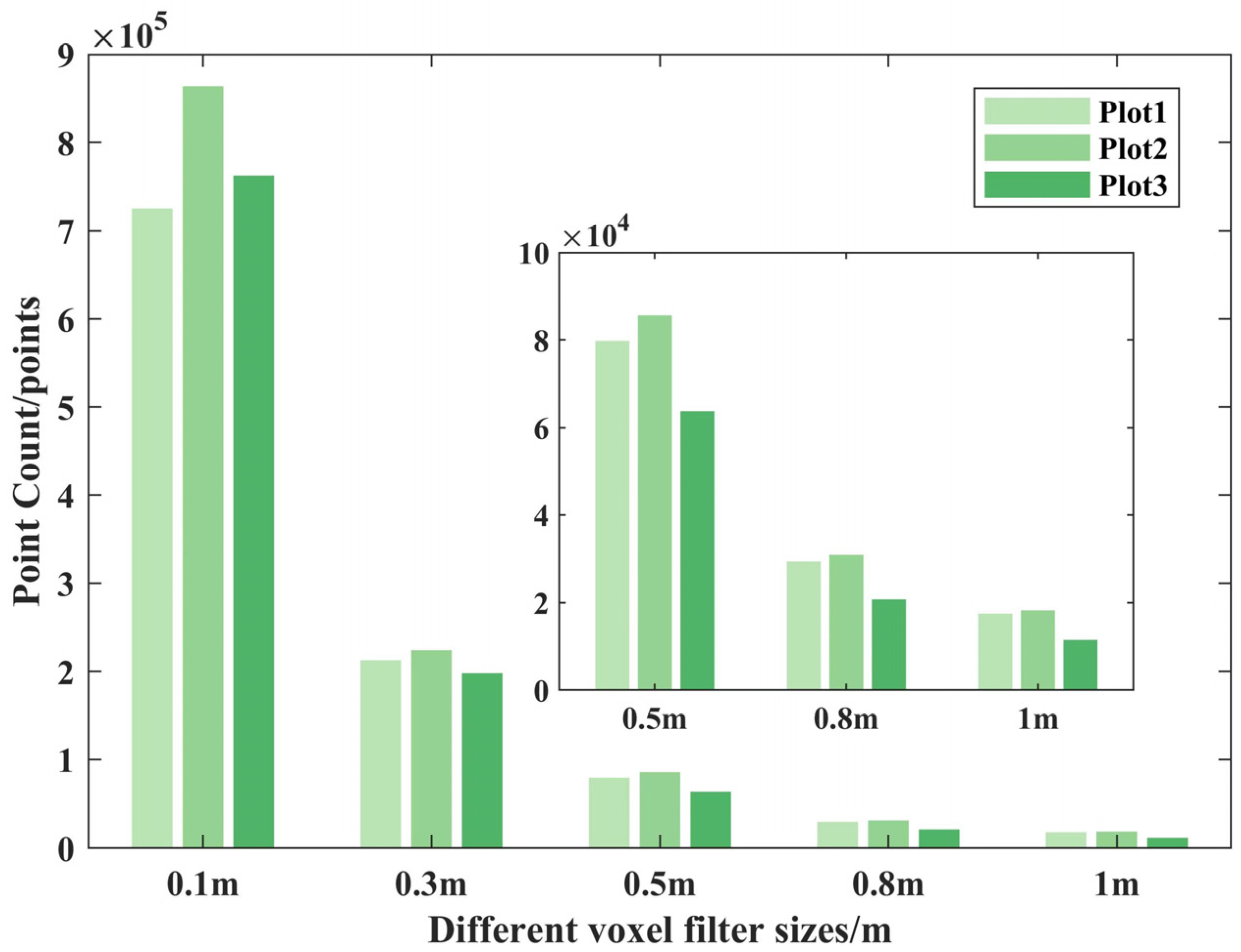
3.1. Comparison of Point Cloud Number
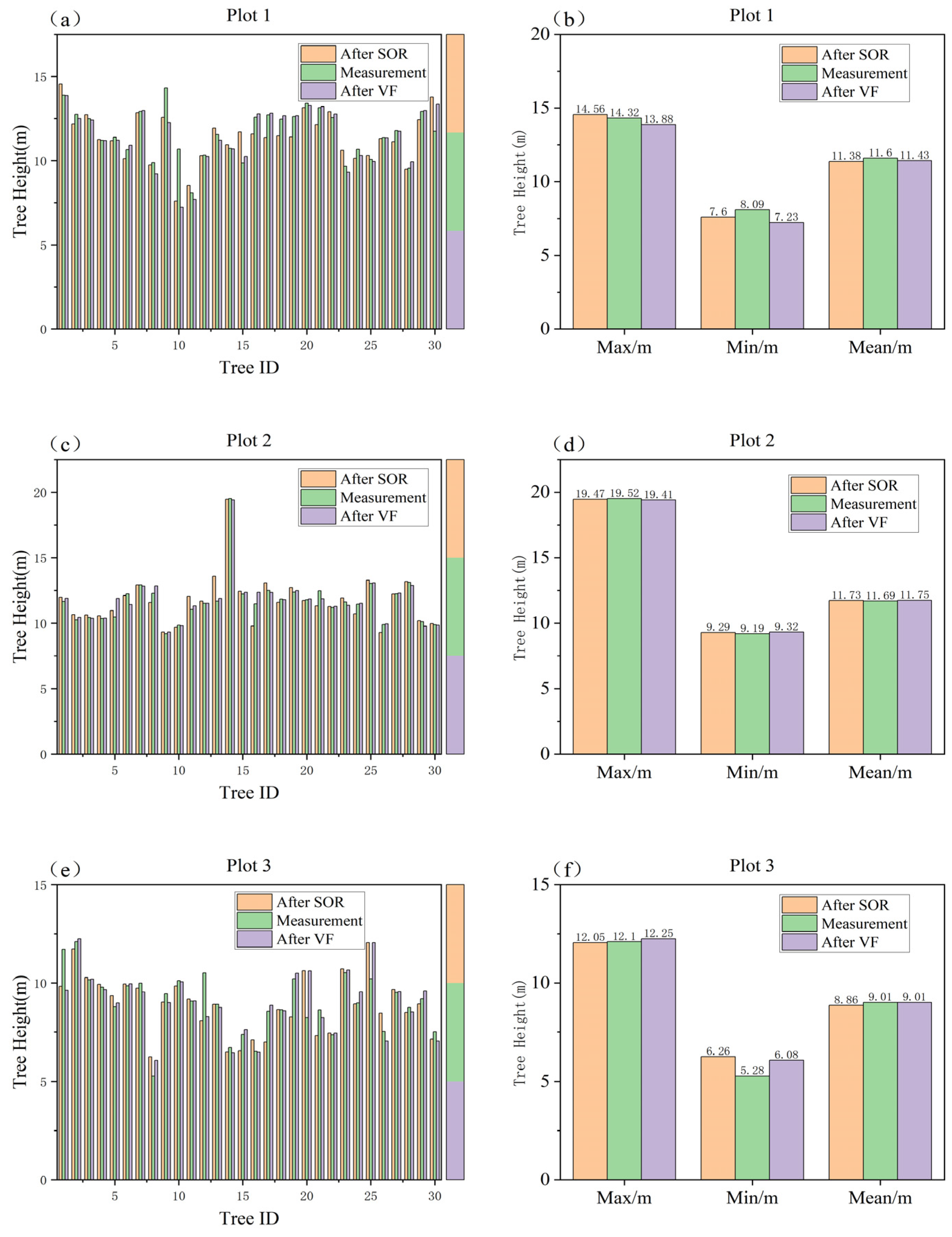
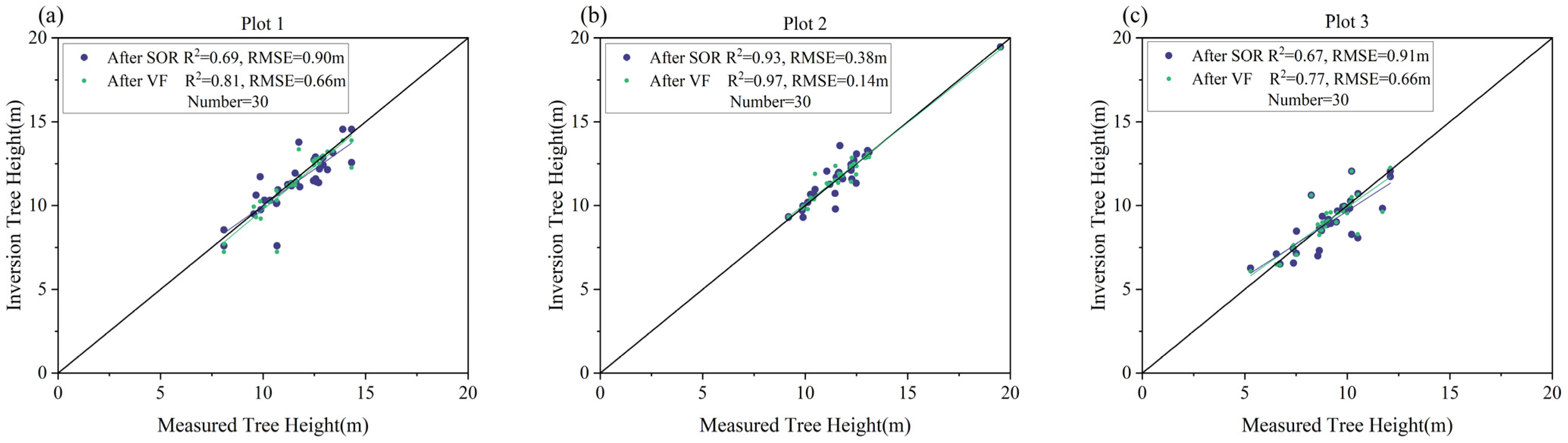
3.2. Impact of Tree Height Accuracy
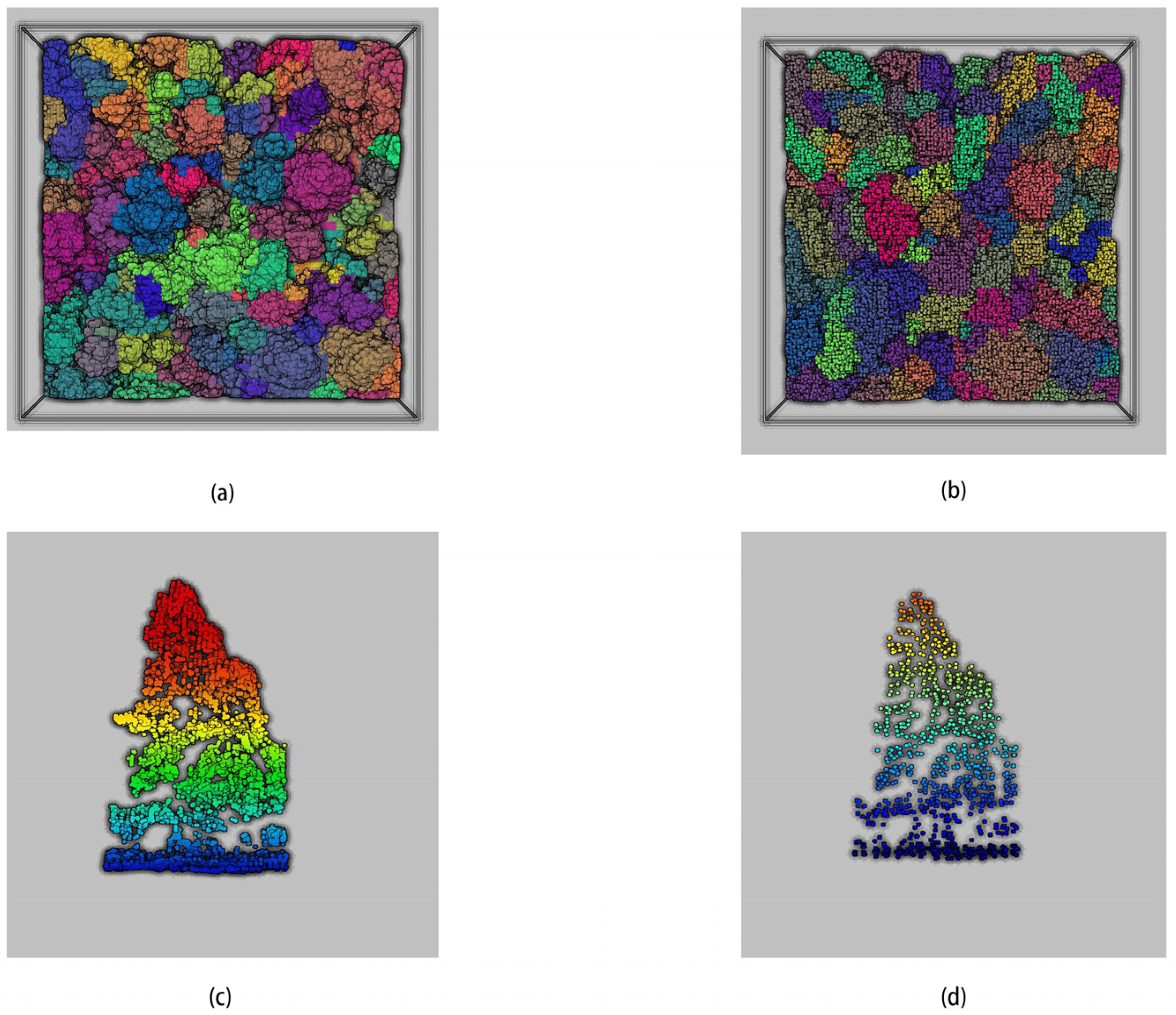
3.3. Scene Comparison
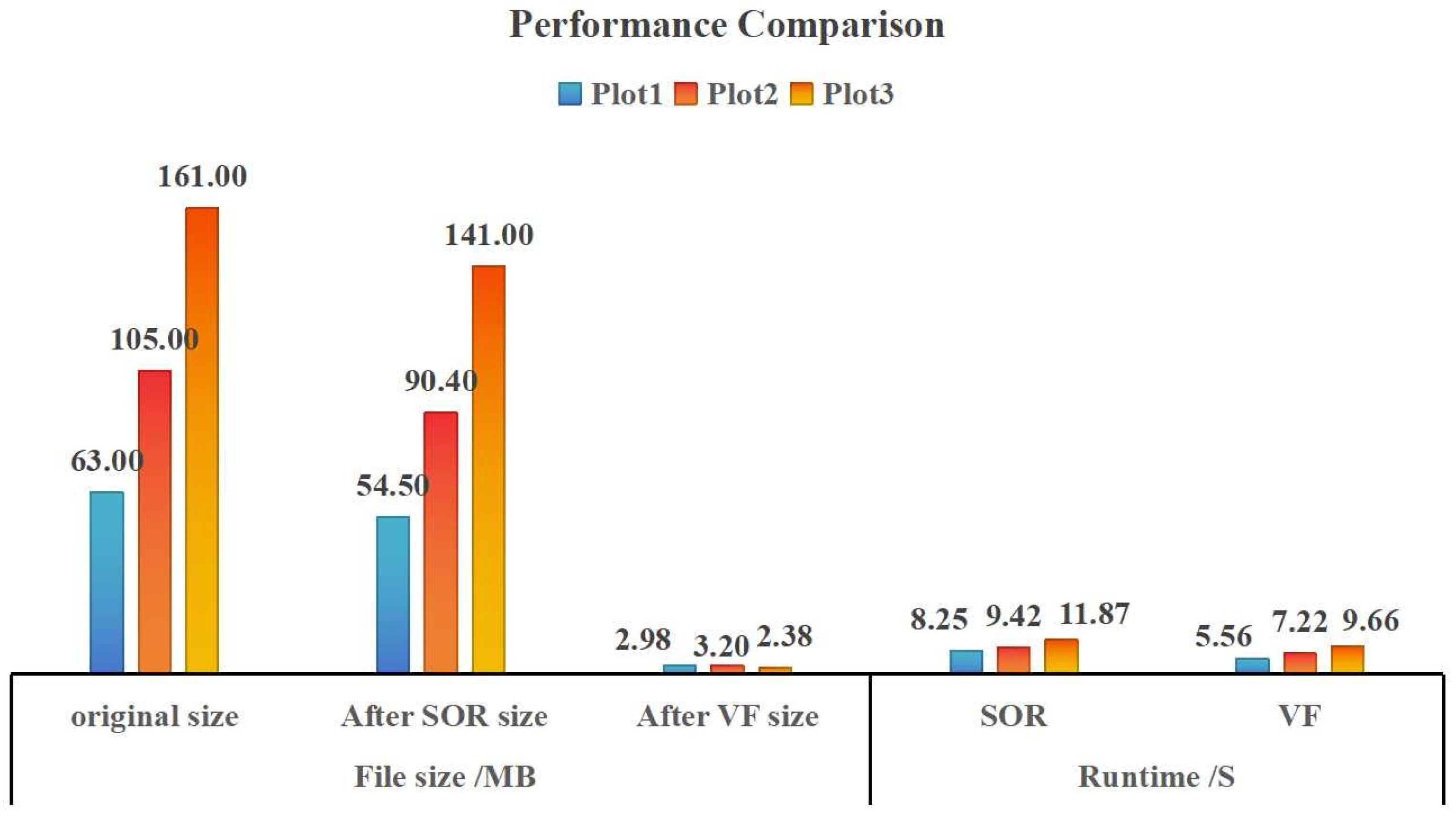
3.4. Performance Comparison
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xiong, J.; Zeng, H.; Cai, G.; Li, Y.; Chen, J.M.; Miao, G. Crown information extraction and annual growth estimation of a Chinese fir plantation based on unmanned aerial vehicle–light detection and ranging. Remote Sens. 2023, 15, 3869. [Google Scholar] [CrossRef]
- Liu, X. Application of airborne lidar technology in forest resource survey. J. Green Sci. Technol. 2019, 15, 244–245. [Google Scholar] [CrossRef]
- Liu, L.; Pang, Y.; Li, Z. Individual tree DBH and Height Extraction Using Terrestrial Laser Scanning (TLS) in a Subtropical Forest. Sci. Silvae Sin. 2016, 52, 26–37. [Google Scholar] [CrossRef]
- Li, Y.; Xie, D.; Wang, Y.; Jin, S.; Zhou, K.; Zhang, Z.; Li, W.; Zhang, W.; Mu, X.; Yan, G. Individual tree segmentation of airborne and uAV LiDAR point clouds based on the watershed and optimized connection center evolution clustering. Ecol. Evol. 2023, 13, e10297. [Google Scholar] [CrossRef]
- Matsugami, H.; Hiroaki, M.; Kenichi, W.; Yo, S.; Kenji, O. Accurate detection of tree apexes in coniferous canopies from airborne scanning light detection and ranging images based on crown-extraction filtering. J. Appl. Remote Sens. 2012, 6, 063502. [Google Scholar] [CrossRef]
- Zhou, R.; Sun, H.; Ma, K.; Tang, J.; Chen, S.; Fu, L.; Liu, Q. Improving estimation of tree parameters by fusing ALS and TLS point cloud data based on canopy gap shape feature points. Drones 2023, 7, 524. [Google Scholar] [CrossRef]
- Ozdemir, I.; Karnieli, A. Predicting Forest Structural Parameters Using the Image Texture Derived from WorldView-2 Multispectral Imagery in a Dryland Forest, Israel. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 701–710. [Google Scholar] [CrossRef]
- Xing, C.; Wang, H.; Zhang, Z.; Yin, J.; Yang, J. A Review of Forest Height Inversion by PolInSAR: Theory, Advances, and Perspectives. Remote Sens. 2023, 15, 3781. [Google Scholar] [CrossRef]
- Meng, X. Forest Measurement, 3rd ed.; China Forestry Publishing Textbook Center: Beijing, China, 2006; pp. 10–17. [Google Scholar]
- Da, L.; Yuan, G. Indoor correction of field tree error in Brrice alomeometer. Inn. Mong. For. Investig. Des. 1998, S1, 68–72. [Google Scholar]
- Wang, P.; Xing, Y.; Wang, C.; Xi, X. A graph cut-based approach for individual tree detection using airborne LiDAR data. J. Univ. Chin. Acad. Sci. 2019, 36, 385–391. [Google Scholar] [CrossRef]
- Lu, L.; Zhou, X.; Yu, Z.; Han, S.; Wang, X. Plot-level Forest Height Inversion Using Airborne LiDAR Data Based on the Random Forest. J. Geo-Inf. Sci. 2016, 18, 1133–1140. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Holopainen, M.; Vastaranta, M. Comparison of Area-Based and Individual Tree-Based Methods for Predicting Plot-Level Forest Attributes. Remote Sens. 2010, 2, 1481–1495. [Google Scholar] [CrossRef]
- Liu, Y.; You, H.; Tang, X.; You, Q.; Huang, Y.; Chen, J. Study on Individual Tree Segmentation of Different Tree Species Using Different Segmentation Algorithms Based on 3D UAV Data. Forests 2023, 14, 1327. [Google Scholar] [CrossRef]
- Wang, Y.; Yue, T.; Zhao, M.; Du, Z.; Liu, X.; Liu, S.; Song, E.; Sun, Z.; Zhang, Y. Study of Factors Impacting the Tree height Extraction Based on Airborne LIDAR Data. J. Geo-Inf. Sci. 2014, 6, 958–964. [Google Scholar] [CrossRef]
- Wang, X.; Chen, C. Method for removing pits of canopy height model from airborne LiDAR data. Sci. Surv. Mapp. 2016, 41, 157–161. [Google Scholar] [CrossRef]
- Zhang, W.; Cai, S.; Liang, X.; Shao, J.; Hu, R.; Yu, S.; Yan, G. Cloth Simulation-Based Construction of Pit-Free Canopy Height Models from Airborne LiDAR Data. For. Ecosyst. 2020, 7, 1. [Google Scholar] [CrossRef]
- Li, D.; Yue, C. The Application of LiDAR in Inversion of the Forest Parameters. Geomat. Spat. Inf. Technol. 2011, 34, 54–58. [Google Scholar]
- Zhang, Y.; Liang, Y.; Wang, X.; Yu, H. A Tree Image Extraction Method Based on K-means and Close-Form. J. Northwest For. Univ. 2019, 34, 240–245. [Google Scholar] [CrossRef]
- Li, Q.; Hu, B.; Shang, J.; Li, H. Fusion Approaches to Individual Tree Species Classification Using Multisource Remote Sensing Data. Forests 2023, 14, 1392. [Google Scholar] [CrossRef]
- Wang, C.; Xi, X. Introduction to LiDAR Remote Sensing, 1st ed.; Higher Education Press: Beijing, China, 2022; pp. 3–4. [Google Scholar]
- Wu, D.; Fan, W. Forest canopy height estimation using LiDAR and optical multi-angler data. J. Beijing For. Univ. 2014, 36, 8–15. [Google Scholar] [CrossRef]
- Xu, J.; Shu, Q.; Yang, K.; Wu, J.; Zhang, Y. The Progress of Forestry Application Based on Spaceborne LiDAR. J. Fujian For. Sci. Technol. 2017, 44, 141–148. [Google Scholar] [CrossRef]
- Yue, C.; Zheng, Y.; Xing, Y. Technical and application development study of space-borne LiDAR in forestry remote sensing. Infrared Laser Eng. 2020, 49, 20200235. [Google Scholar] [CrossRef]
- Wieser, M.; Mandlburger, G.; Hollaus, M.; Otepka, J.; Glira, P.; Pfeifer, N. A Case Study of UAS Borne Laser Scanning for Measurement of Tree Stem Diameter. Remote Sens. 2017, 9, 1154. [Google Scholar] [CrossRef]
- Li, M.; Liu, Q.; Feng, Y. Analysis of estimation models of plantation stand heights using UAV LiDAR. Natl. Remote Sens. Bull. 2022, 12, 2665–2678. [Google Scholar] [CrossRef]
- Liu, K.; Shen, X.; Cao, L. Estimating Forest structural attributes using UAV-LiDAR data in Ginkgo plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Hu, T.; Wang, T.; He, K.; Qu, Y.; Ma, Q.; Lu, J. Extraction of individual tree height using WorldView-3 remote sensing images and airborne LiDAR. J. Arid Land Resour. Environ. 2022, 36, 166–175. [Google Scholar] [CrossRef]
- Discher, S.; Richter, R.; Trapp, M.; Döllner, J. Service-Oriented Processing and Analysis of Massive Point Clouds in Geoinformation Management. In Service-Oriented Mapping; Döllner, J., Jobst, M., Schmitz, P., Eds.; Lecture Notes in Geoinformation and Cartography; Springer International Publishing: Cham, Switzerland, 2019; pp. 43–61. ISBN 978-3-319-72433-1. [Google Scholar]
- Liang, R.; Sun, Y.; Li, Y. Comparison of Deep Learning Traditional Models to Simulate the Height-DBH relationship of Chinese Fir. For. Res. 2021, 34, 65–72. [Google Scholar] [CrossRef]
- Yang, J.; Wang, F.; Song, Z. Development of Natural Forest Quercus mongolica Diameter-Height Curve Model Based on BLS. For. Eng. 2023, 38, 57–64. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Y.; Yu, S. Research on Extraction Method of Forest Tree Height Based on Unmanned Aerial Vehicle LiDAR and Multispectral Data. For. Eng. 2023, 39, 29–36. [Google Scholar] [CrossRef]
- Available online: https://dl.djicdn.com/downloads/m600%20pro/20180417/Matrice600ProUserManualv1CHS.pdf (accessed on 10 March 2024).
- Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/RIEGL_VUX-1UAV-22_Datasheet_2023-04-25.pdf (accessed on 10 March 2024).
- Wang, J.; Li, X.; Zhang, H. Terrain Adaptive Filtering Method Based on Elevation Normalization. Laser Optoelectron. Prog. 2022, 59, 1028008. [Google Scholar] [CrossRef]
- Lindberg, E.; Holmgren, J. Individual Tree Crown Methods for 3D Data from Remote Sensing. Curr. For. Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef]
- Available online: http://www.lidarcas.cn/# (accessed on 6 December 2023).
- Tan, Y.; Liu, X.; Zhang, Y. A supervoxel-based active relearning framework for LiDAR point clouds classification. Bull. Surv. Mapp. 2022, 5, 79–83. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Wang, W.; Pang, Y.; Du, L.; Zhang, Z.; Liang, X. Individual tree segmentation for airborne LiDAR point cloud data using spectral clustering and supervoxel-based algorithm. Natl. Remote Sens. Bull. 2022, 26, 1650–1661. [Google Scholar] [CrossRef]
- Chen, X.; Wang, R.; Shi, W.; Li, X.; Zhu, X.; Wang, X. An Individual Tree Segmentation Method That Combines LiDAR Data and Spectral Imagery. Forests 2023, 14, 1009. [Google Scholar] [CrossRef]
- Li, Z.; Huang, B.; Lei, J. Analysis of the factors affecting the point cloud density of airborne LiDAR. Sci. Surv. Mapp. 2019, 44, 204–211. [Google Scholar] [CrossRef]
- Pang, Y.; Wang, W.; Du, L.; Zhang, Z.; Liang, X.; Li, Y.; Wang, Z. Nyström-Based Spectral Clustering Using Airborne LiDAR Point Cloud Data for Individual Tree Segmentation. Int. J. Digit. Earth 2021, 14, 1452–1476. [Google Scholar] [CrossRef]
- Jiang, T.; Zou, J. Point Cloud Denoising Algorithm of Voxel Filtering Based on Region Growing. J. Geomat. 2021, 46, 63–66. [Google Scholar] [CrossRef]
- Xing, Y.; Song, T.; Zhao, Y.; Liu, G.; Zheng, M. Point cloud reduction algorithm of 3D-SIFT feature point extraction and voxel filtering. Laser J. 2023, 44, 163–169. [Google Scholar] [CrossRef]
- He, X.; Qin, L. Based on combined improved voxel filtering algorithm and Gaussian filtering algorithm. Inf. Rec. Mater. 2022, 23, 229–231. [Google Scholar] [CrossRef]
- You, H.; Xing, Y.; Wang, Z.; Wang, R.; Sun, X. Effect of LiDAR Point Density on Tree Height Estimation in Plots Level. J. Northeast For. Univ. 2014, 42, 143–148. [Google Scholar] [CrossRef]
- Pang, Y.; Li, Z.; Tan, B.; Liu, Q.; Zhao, F.; Zhou, S. The effects of Airborne LiDAR Point Density on Forest Height Estimation. For. Res. 2008, 21, 14–19. [Google Scholar] [CrossRef]
- Pang, Y.; Zhao, F.; Li, Z.; Zhou, S.; Deng, G.; Liu, Q.; Chen, E. Forest Height Inversion using Airborne Lidar Technology. J. Remote Sens. 2008, 12, 152–158. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | Tree Varieties | Number of Trees | Mean Height (m) | Max Height (m) | Min Height (m) | Center of Plot | ||
|---|---|---|---|---|---|---|---|---|
| Longitude | Latitude | Elevation (m) | ||||||
| 1 | Pinus yunnanensis, Eucalyptus | 30 | 11.60 | 14.32 | 8.09 | 102°34′12.23475″ E | 24°19′06. 21122″ N | 1801.57 |
| 2 | Pinus yunnanensis | 30 | 11.69 | 19.52 | 9.19 | 102°34′48.63694″ E | 24°11′16. 60312″ N | 2010.91 |
| 3 | Cypress | 30 | 9.01 | 12.10 | 5.28 | 102°52′05.31080″ E | 24°12′22. 55075″ N | 1818.79 |
| Unmanned Aerial Vehicle | Scanner |
|---|---|
| Model: DJI M600 Pro | Model: RIEGL VUX-1UAV |
| Axles: 6 | Laser Class: 1 |
| Hover accuracy: vertical: ±0.5 m, horizontal: ±1.5 m | Accuracy/Repetitive accuracy: 15 mm/10 mm |
| Flight speed: 0–18 m/s | Scanning speed: 10–200 Lines/s |
| Maximum flight altitude: 2500 m | Maximum measurement range: 1415 m |
| Maximum pitch angle: 25° | Field of view: 360° |
| Plot | Original Number of Points | SOR Number of Points | VF Number of Points | P1 (%) | P2 (%) |
|---|---|---|---|---|---|
| 1 | 1,684,809 | 1,457,317 | 79,782 | 13.50 | 95.26 |
| 2 | 2,807,338 | 2,417,232 | 85,666 | 13.90 | 96.95 |
| 3 | 4,297,350 | 3,773,955 | 63,802 | 12.18 | 98.52 |
| Filter Method | Plot | Mean Accuracy (%) | Max Accuracy (%) | Min Accuracy (%) | All Plot Mean Accuracy (%) |
|---|---|---|---|---|---|
| VF | 1 | 96.41 | 99.92 | 67.70 | 96.24 |
| 2 | 97.87 | 100.00 | 86.52 | ||
| 3 | 94.45 | 99.94 | 71.21 | ||
| SOR | 1 | 93.84 | 99.74 | 71.16 | 94.17 |
| 2 | 96.42 | 99.95 | 93.82 | ||
| 3 | 92.24 | 99.96 | 71.10 |
| Plot | Varieties of Trees | Average Slope (°) | Elevation (m) | SD1 1 (Plants/ha) | SD2 2 (Plants/ha) |
|---|---|---|---|---|---|
| 1 | Pinus yunnanensis, Eucalyptus | 14.74 | 1801.57 | 1000.00 | 933.00 |
| 2 | Pinus yunnanensis | 22.22 | 2010.91 | 1133.33 | 1078.00 |
| 3 | Cypress | 14.84 | 1818.79 | 1066.67 | 989.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, D.; Deng, Y.; Zhang, J.; Wang, J.; Dong, P. Influence of VF and SOR-Filtering Methods on Tree Height Inversion Using Unmanned Aerial Vehicle LiDAR Data. Drones 2024, 8, 119. https://doi.org/10.3390/drones8040119
Duan D, Deng Y, Zhang J, Wang J, Dong P. Influence of VF and SOR-Filtering Methods on Tree Height Inversion Using Unmanned Aerial Vehicle LiDAR Data. Drones. 2024; 8(4):119. https://doi.org/10.3390/drones8040119
Chicago/Turabian StyleDuan, Di, Yuncheng Deng, Jianpeng Zhang, Jinliang Wang, and Pinliang Dong. 2024. "Influence of VF and SOR-Filtering Methods on Tree Height Inversion Using Unmanned Aerial Vehicle LiDAR Data" Drones 8, no. 4: 119. https://doi.org/10.3390/drones8040119
APA StyleDuan, D., Deng, Y., Zhang, J., Wang, J., & Dong, P. (2024). Influence of VF and SOR-Filtering Methods on Tree Height Inversion Using Unmanned Aerial Vehicle LiDAR Data. Drones, 8(4), 119. https://doi.org/10.3390/drones8040119