
Review of Wind Flow Modelling in Urban Environments to Support the Development of Urban Air Mobility


Abstract
:1. Introduction
2. Wind Flow in Urban Environments
2.1. Wind Flow
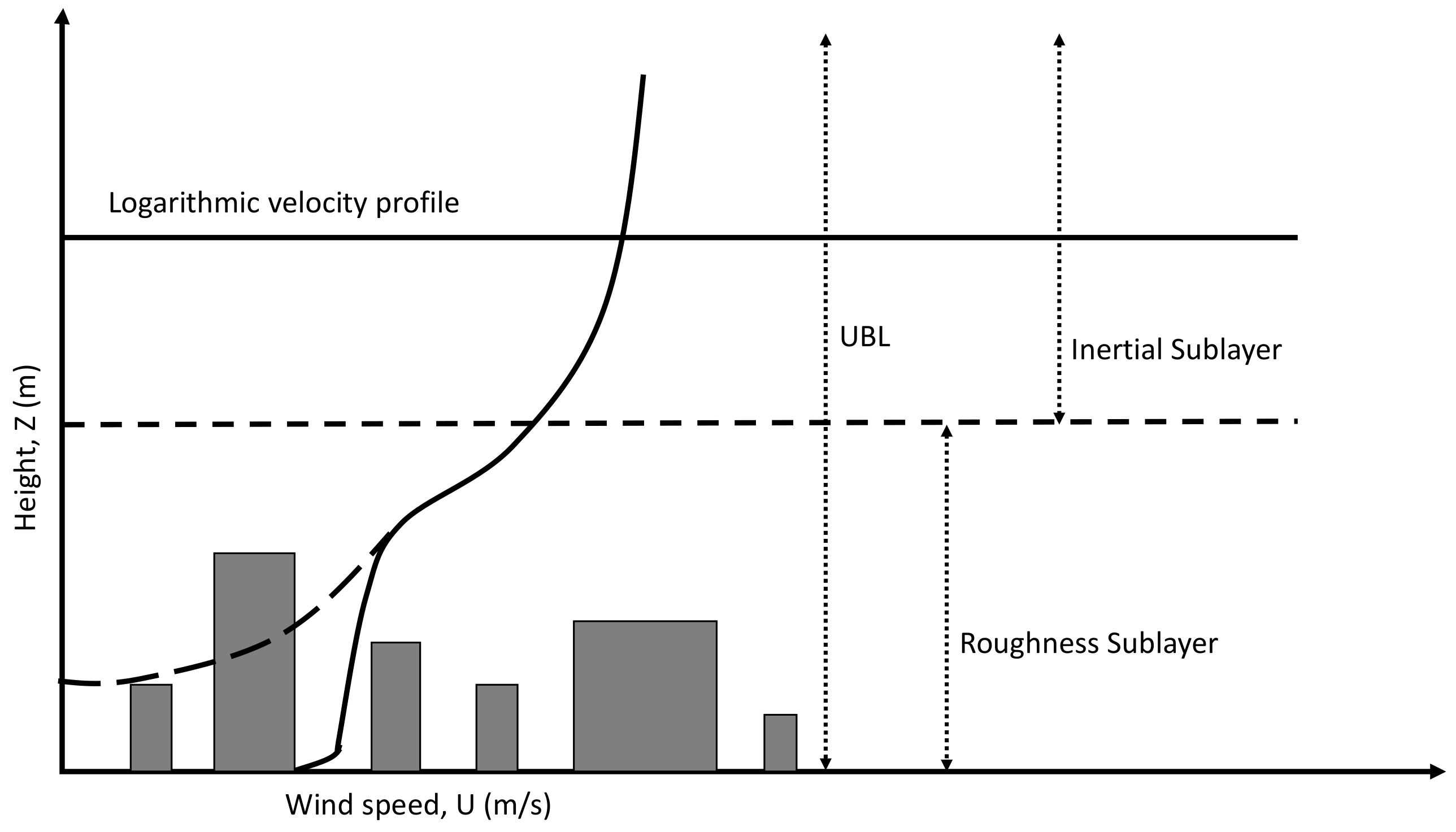
2.2. Boundary Layers and Atmospheric Turbulence in Urban Environments
- Topography, uneven surface, and human-made obstacles (mechanical turbulence),
- Uneven ground surface temperatures that are typically caused in the summer (thermal or convective turbulence),
- Friction between the warm and cold front (frontal turbulence),
- Wind shear.
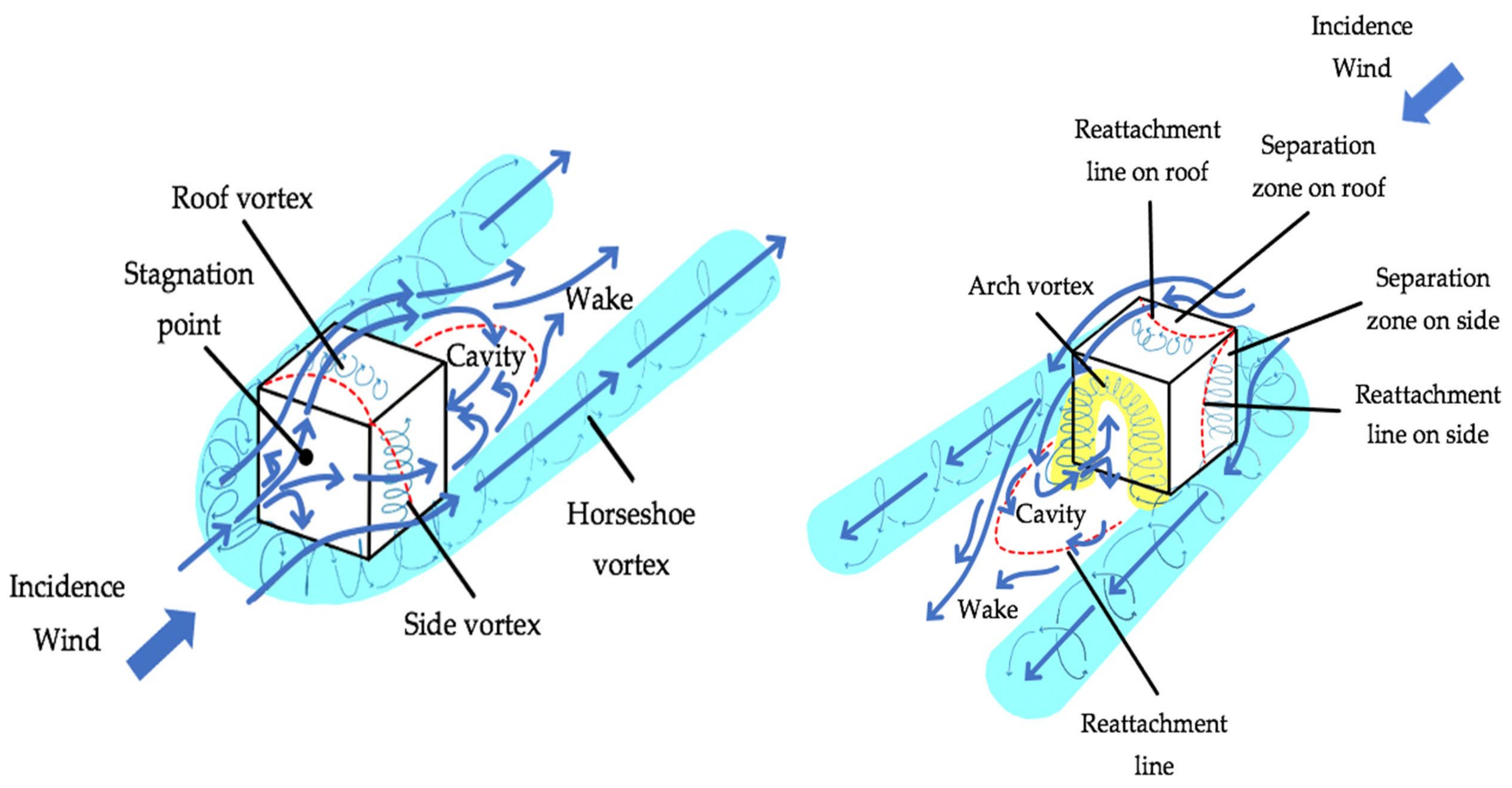
2.3. Wind Flow around a Single Building
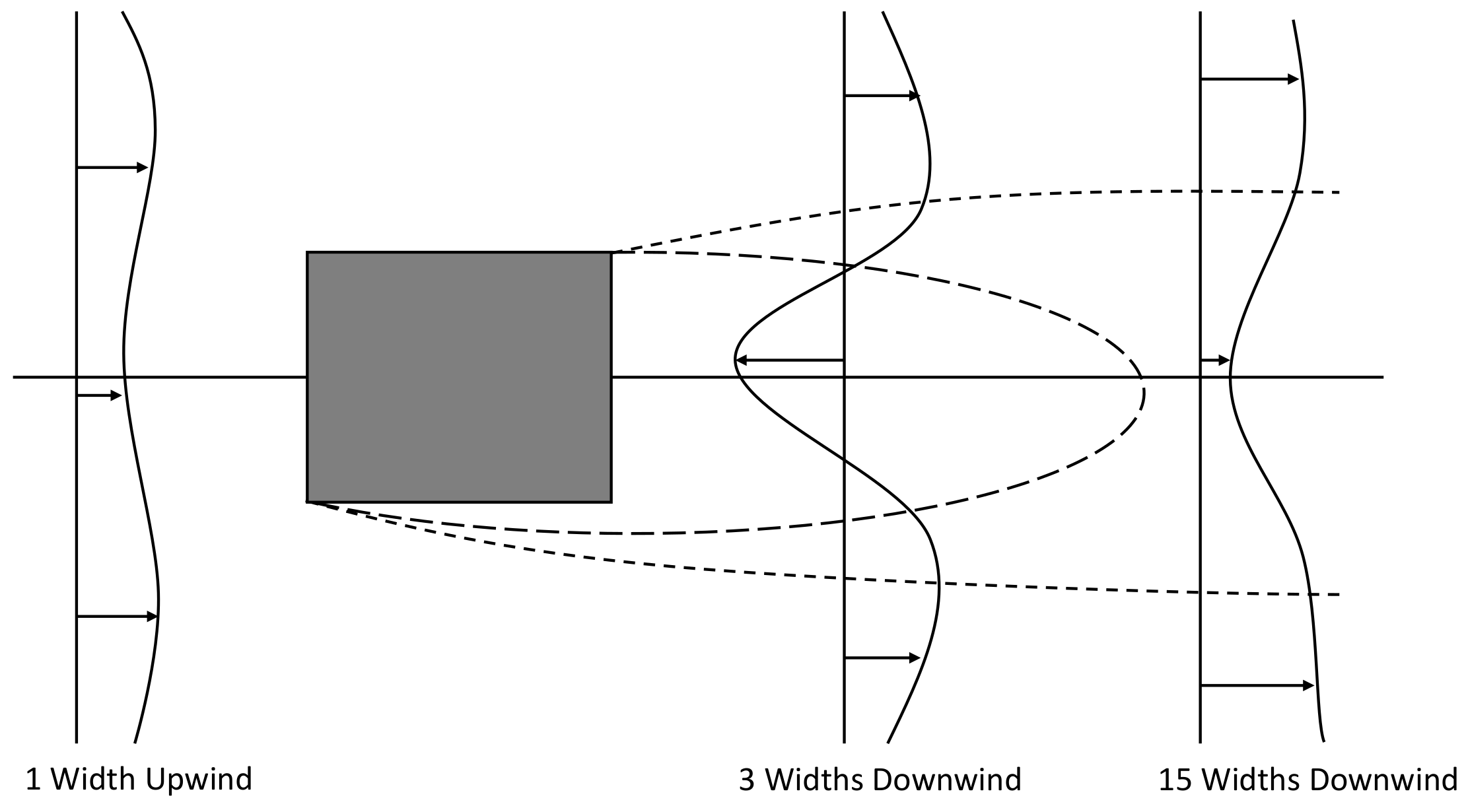
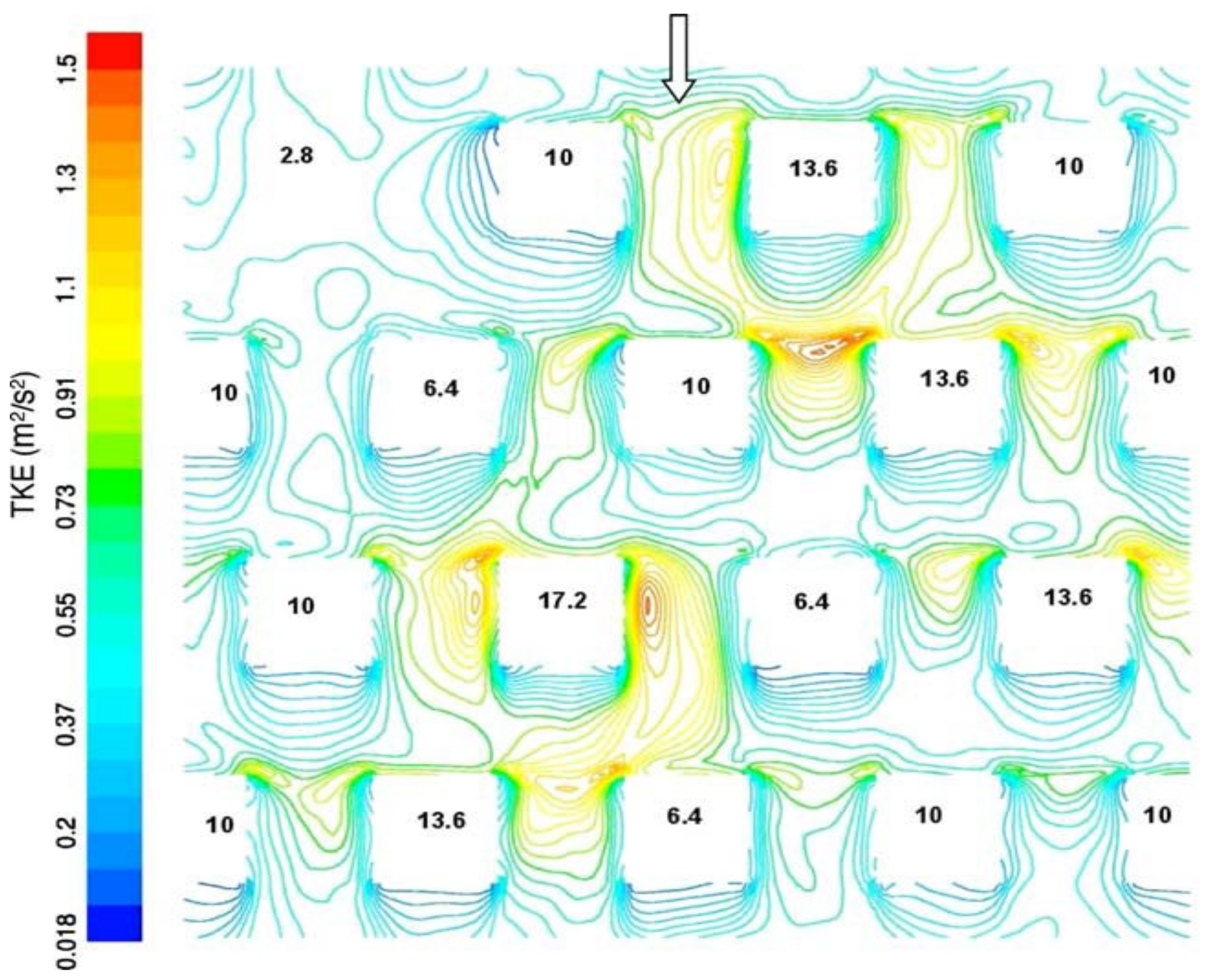
2.4. Wind Flow around a Group of Buildings
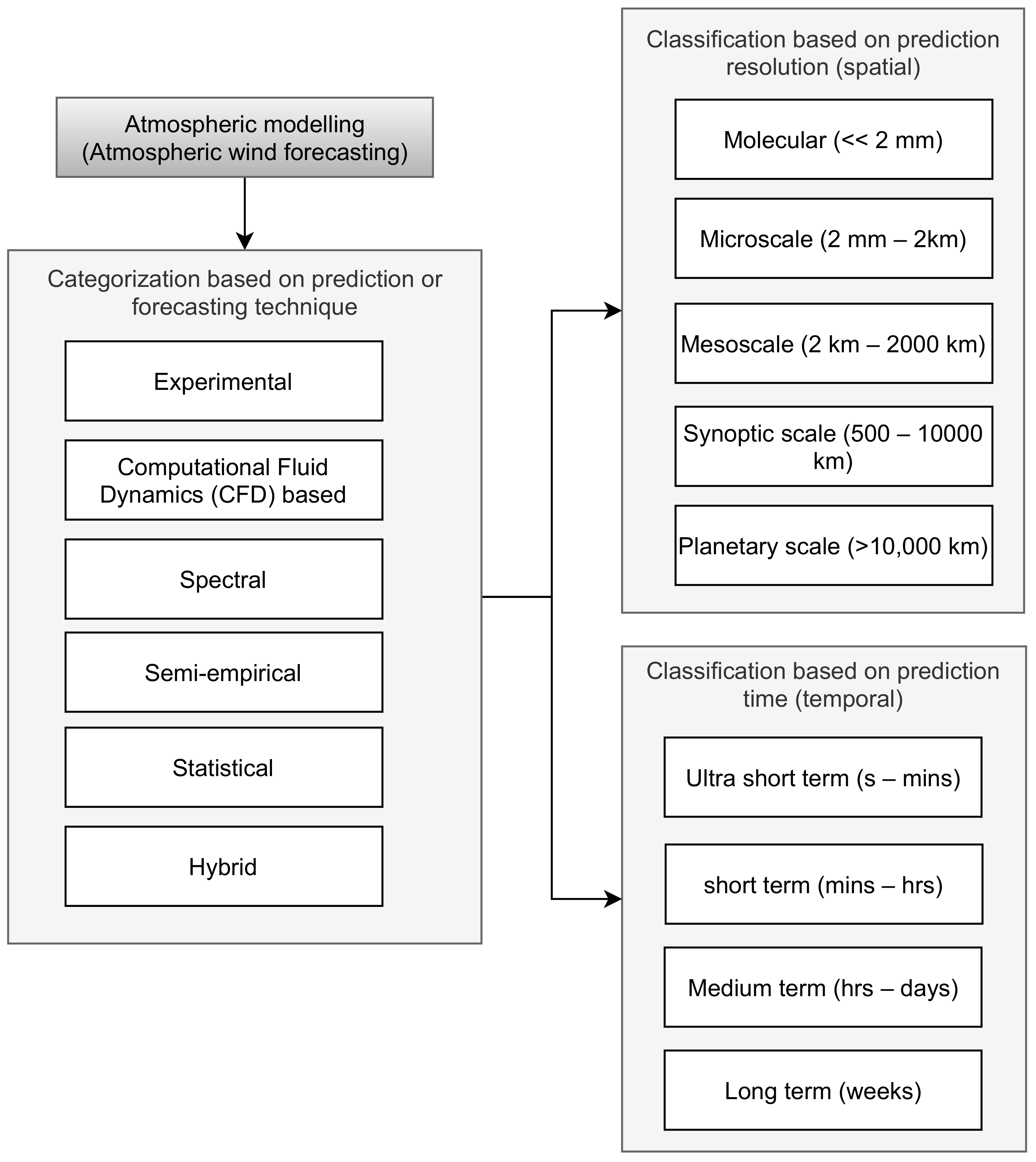
3. Overview of Wind Flow Modelling in Urban Environment
3.1. Experimental Method
3.2. Computational Fluid Dynamics (CFD)-Based Methods
- LES (Large Eddy Simulation)LES is one of the most popular methods in CFD for studying the fluid transport process in the ABL (i.e., turbulent flows) [39], pollution dispersion, wind flow in urban areas or near obstacles, and wake interactions [31,40]. Low-pass filters are employed within LES models to solve the Navier–Stokes equations. Unlike direct numerical simulation (DNS), where the flow energy is studied by modelling for all scales of fluid motion, LES filters and models only a small scale of motions to investigate the energy spectrum of turbulent eddies [41]. This comparatively reduces the computational power and time required by producing results that are close to DNS data and more accurate than RANS. However, LES still falls into the medium- or long-term temporal class. Thus, there have been several efforts made to speed up the computation speed of LES, for example, there is the research group that is working on the parallelized LES model (PALM) software 6.0 framework. PALM is being developed for simulating wind flow in the urban canopy with grid sizes of less than 1 m [42].
- RANS (Reynolds-averaged Navier–Stokes)RANS is a numerical method that averages Navier–Stokes equations to model turbulent flows. This method is primarily based on Reynolds decomposition, where the flow quantities are broken into their time-averaged mean flow and fluctuating components, generating unknown Reynolds stresses. Hence, to solve these unknowns, which vary in both space and time, turbulence closure models such as k-, k-, SST k-, etc., [32,43,44] are typically employed.RANS is often considered an industry standard CFD model to study turbulence. It has been used commonly to model wind flow within an urban environment and for pollution dispersion studies. Moreover, RANS, through an accuracy trade-off, seems to be considered a valid alternative to eddy-resolving CFD methods like DNS and LES, which are computationally expensive and less time-efficient [45]. However, like every other CFD model, RANS comes with its drawbacks, and one of the limitations of employing RANS to ABL flows is the misrepresentation of stream-wise gradients in the vertical mean wind speed profiles and turbulence quantities due to improper selection of boundary layers [45]. Likewise, Denise et al. [46] state that the accuracy of RANS is comparable to the LES data only above the urban canopy layer (UCL).
3.3. Spectral Methods
3.4. Semi-Empirical Methods
3.5. Statistical Methods
3.6. Hybrid Methods
4. Compare-and-Contrast Analysis
5. Wind Flow Modelling for UAM Development
5.1. Cluster 1: Hybrid
5.2. Cluster 2: Historical Weather Data
5.3. Cluster 3: Experimental
5.4. Cluster 4: CFD
5.5. Cluster 5: Spectral
5.6. Cluster 6: Semi-Empirical
5.7. Cluster 7: Miscellaneous
6. Summary and Remarks
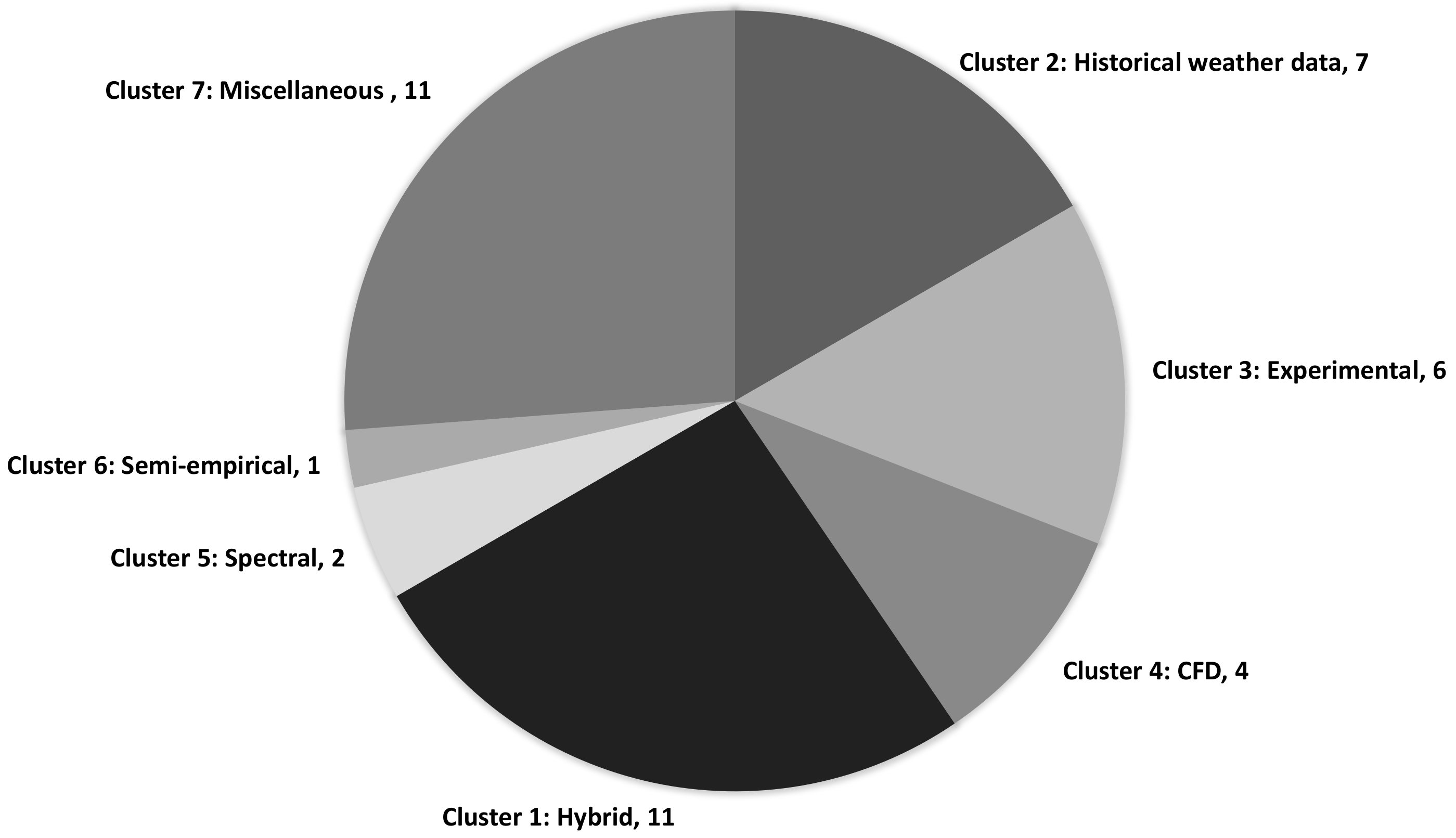
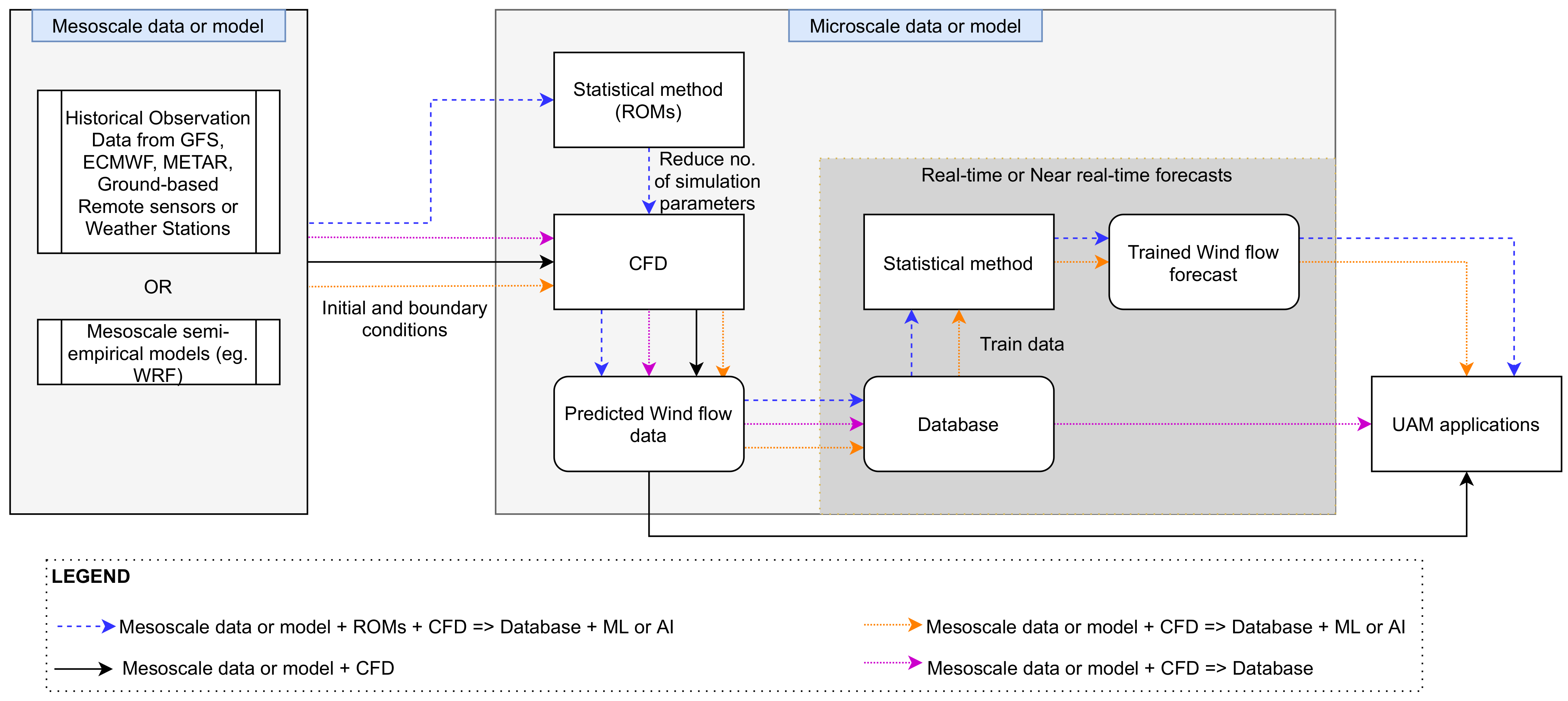
- About 26% of the 42 papers explore the potential of hybrid models in estimating urban wind fields for UAM. These models integrate WRF, historical weather data, ML, or AI with CFD to generate accurate results with less computational time and expense. However, it was observed that the prediction accuracy and time varied depending on the selection of coupled models. That is, a hybrid model that nested CFD methods like RANS within a WRF mesoscale domain had a computation time of more than a few hours for increased accuracy, in contrast to an ML + CFD based model that had a comparatively shorter prediction time. Thus, the choice of the models to be combined must be carefully considered, as overly simplified models lack accuracy, CFD-based models have a higher convergence time, and ML- or AI-based model accuracy depends on the training data.
- All the papers included in this review consistently emphasize the discordant UAM demand for faster and more accurate wind forecasting models. However, the existing ConOps, or the certification standards, do not specify how accurate and fast these wind forecasts or models should be, —i.e., there are no requirements that quantify the maximum and minimum expected uncertainties, latency, etc.— nor do they specify which wind parameters to use and how the wind data must be dispensed by the weather service providers. Moreover, the interpretation of the terms “faster” and “accurate” may vary depending on the context of the application. For example, precise real-time weather forecasts are vital during landing, approach, cruise, hover, and transitional flight phases to enable timely decision making for in-flight safety systems and for enhancing operational safety management. Conversely, near-real-time forecasts might suffice for the takeoff phase to strategically postpone, reject, or reschedule flight operations if adverse wind conditions are detected at the touchdown and lift-off (TLOF) and final approach and takeoff (FATO) areas. Similarly, wind modelling for urban wind database generation to determine the certification standards and operational guidelines could slightly trade prediction time for accuracy. On the whole, these deductions indicate that there is still ambiguity in determining the weather requirement standards.
- Current research on wind modelling for UAM applications is limited, as around 48% of the papers that discuss microscale wind modelling for UAM from a generic standpoint suggest the use of CFD, but it is evident from the review in Section 3 that there are wind modelling systems, like QES-winds, Quic-Urb, URock, etc., that use highly parameterized methods for ultrafast wind prediction. Similarly, turbulence models like Kaimal, Mann, etc., used within the wind engineering domain to depict low-altitude wind conditions may also be applicable and efficient for use within the UAM sector.
- With regard to the varying accuracy and prediction time of the wind models, it can be inferred that the technique used for generating microscale wind data would vary depending on the UAM application scenario. For example, LES and DNS are not applicable for UAM operational forecasts; however, the data from these methods could be used for validating wind data from low-fidelity simulators. RANS could be used to simulate wind fields for multiple scenarios and test conditions, and the data generated from these tests could be stored in a database to define AD levels for different flight phases and UAM configurations. Similarly, an initial high-level qualitative suitability and efficiency evaluation of other microscale wind field simulators can be performed for diverse UAM applications as shown in Table 4.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- European Union Aviation Safety Agency (EASA). Study on the Societal Acceptance of Urban Air Mobility in Europe; European Union Aviation Safety Agency (EASA): Cologne, Germany, 2021.
- Federal Aviation Administration (FAA). Urban Air Mobility (UAM): Concept of Operations v2.0; US Department of Transportation, Federal Aviatiom Administration (FAA), Office of NextGen: Washington, DC, USA, 2023.
- European Union Aviation Safety Agency (EASA). Special Condition Vertical Take-Off and Landing (VTOL) Aircraft; European Union Aviation Safety Agency (EASA): Cologne, Germany, 2019.
- European Union Aviation Safety Authority EASA. Vertiports: Prototype Technical Specifications for the Design of VFR Vertiports for Operation with Manned VTOL-Capable Aircraft Certified in the Enhanced Category (PTS-VPT-DSN); European Union Aviation Safety Agency EASA: Cologne, Germany, 2022.
- Doo, J.T.; Tsairides, M.A.; Pavel, M.D.; Smith, M.; Didey, A.; Bennet, E.; Hange, C.; Bromfield, M.; Diller, N.P.; Mooberry, J. NASA Electric Vertical Takeoff and Landing (eVTOL) Aircraft Technology for Public Services—A White Paper (NASA Transformative Vertical Flight Working Group 4 (TVF4)); Technical Report; NASA: Washington, DC, USA, 2021. [Google Scholar]
- Ranquist, E.; Steiner, M.; Argrow, B. Exploring the range of weather impacts on UAS operations. In Proceedings of the 18th Conference on Aviation, Range and Aerospace Meteorology, Seattle, WA, USA, 22–26 January 2017. [Google Scholar]
- Reiche, C.; Cohen, A.P.; Fernando, C. An initial assessment of the potential weather barriers of Urban Air Mobility. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6018–6027. [Google Scholar] [CrossRef]
- Hamilton, B.A. Urban Air Mobility (UAM) Market Study—Final Report; Technical Report; NASA: Washington, DC, USA, 2018. [Google Scholar]
- Federal Aviation Administration (FAA). Unmanned Aircraft System (UAS) Traffic Management (UTM): Concept of Operations, v2.0; FAA: Washington, DC, USA, 2020. [Google Scholar]
- EUROCONTROL. U-Space ConOps and Architecture, 4th ed.; EUROCONTROL, European Union: Brussels, Belgium, 2023. [Google Scholar]
- Geister, D.; Korn, B. Blueprint: Concept for Urban Airspace Integration, v1.0; Technical Report; Institute of Flight Guidance, DLR: Cologne, Germany, 2017. [Google Scholar]
- Bauranov, A.; Rakas, J. Designing airspace for urban air mobility: A review of concepts and approaches. Prog. Aerosp. Sci. 2021, 125, 100726. [Google Scholar] [CrossRef]
- Lascara, B.; Lacher, A.; DeGarmo, M.; Maroney, D.; Niles, R.; Vempati, L. Urban Air Mobility Airspace Integration Concepts; Technical Report; The MITRE Corporation: Bedford, MA, USA, 2019. [Google Scholar]
- European Union Aviation Safety Agency EASA. Proposed Means of Compliance with the Special Condition VTOL (MOC SC-VTOL); European Union Aviation Safety Agency EASA: Cologne, Germany, 2021; Issue 2.
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban Air Mobility: History, Ecosystem, Market Potential, and Challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Annon. Elsevier Scopus APIs: Getting Started Guide (User Guide); Elsevier R&D Solutions: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Federal Aviation Administration FAA. Engineering Brief 105—Vertiport Design; Federal Aviation Administration FAA: Washington, DC, USA, 2022.
- Grimmond, C.S.B.; Oke, T.R. Turbulent heat fluxes in urban areas: Observations and a local-scale urban meteorological parameterisation scheme (LUMPS). J. Appl. Meteorol. Climatol. 2002, 41, 792–810. [Google Scholar] [CrossRef]
- Britter, R.E.; Hanna, S.R. Flow and Dispersion in Urban Areas. Annu. Rev. Fluid Mech. 2003, 35, 469–496. [Google Scholar] [CrossRef]
- Stull, R. An Introduction to Boundary Layer Meteorology; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Bottema, M. Urban roughness modeling in relation to pollutant dispersal. Atmos. Environ. 1997, 31, 3059–3075. [Google Scholar] [CrossRef]
- Richardson, L.F. Weather Prediction by Numerical Process; Cambridge University Press: London, UK, 1922. [Google Scholar]
- Gultepe, I.; Sharman, R.; Williams, P.D.; Zhou, B.; Ellrod, G.; Minnis, P.; Trier, S.; Griffin, S.; Yum, S.S.; Gharabaghi, B.; et al. A Review of High Impact Weather for Aviation Meteorology. Pure Appl. Geophys. 2019, 176, 1869–1921. [Google Scholar] [CrossRef]
- Aviation Weather Handbook; U.S. Department of Transportation & Federal Aviation Administration (FAA): Washington, DC, USA, 2022; Chapter 19.
- Lang, P.R.; Lombargo, F.S. (Eds.) Atmospheric Turbulence, Meteorological Modelling and Aerodynamics; Nova Science Publishers, Inc.: New York, NY, USA, 2010. [Google Scholar]
- Peterka, J.A.; Meroney, R.N.; Kothari, K.M. Wind flow patterns around buildings. J. Wind Eng. Ind. Aerodyn. 1985, 21, 21–38. [Google Scholar] [CrossRef]
- Blocken, B.; Stathopoulos, T.; Carmeliet, J.; Hensen, J. Application of computational fluid dynamics in building performance simulation for the outdoor environment: An overview. J. Build. Perform. Simul. 2011, 4, 157–184. [Google Scholar] [CrossRef]
- Pourteimouri, P.; Campmans, G.H.P.; Wijnberg, K.M.; Hulscher, S. A Numerical Study on the Impact of Building Dimensions on Airflow Patterns and Bed Morphology around Buildings at the Beach. J. Mar. Sci. Eng 2022, 10, 13. [Google Scholar] [CrossRef]
- Hunt, J. The effect of single buildings and structures. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Sci. 1971, 269, 457–467. [Google Scholar]
- Hunt, J. Fundamental studies of wind flow near buildings. In Models and Systems in Architecture and Building—LUBFS; Conference Proceedings No. 2; Construction Press: Berlin, Germany, 1975. [Google Scholar]
- Xie, Z.T.; Coceal, O.; Castro, I.P. Large-Eddy Simulation of flows over Random Urban-like Obstacles. Bound.-Layer Meteorol. 2008, 129, 1–23. [Google Scholar] [CrossRef]
- Kima, J.J.; Baikb, J.J. A numerical study of the effects of ambient wind direction on flow and disperion in urban street canyons using the RNG k–e turbulence model. Atmos. Environ. 2004, 38, 3039–3048. [Google Scholar] [CrossRef]
- Jacobson, M.Z. Fundamentals of Atmospheric Modelling, 2nd ed.; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Soman, S.S.; Zareipour, H.; Malik, O.; Mandal, P. A review of wind power and wind speed forecasting methods with different time horizons. In Proceedings of the North American Power Symposium 2010, Arlington, TX, USA, 26–28 September 2010; pp. 1–8. [Google Scholar]
- Cermak, J. Wind tunnel design for physical modelling of atmospheric boundary layers. J. Eng. Mech. Div. ASCE 1981, 108, 523–642. [Google Scholar]
- Aly, A.M. Atmospheric Boundary-Layer simulation for the built environment: Past, present and future. Build. Environ. 2014, 75, 206–221. [Google Scholar] [CrossRef]
- Lee, R.G.; Zan, S.J. Wind tunnel testing of a helicopter fuselage and rotor in a ship airwake. J. Am. Helicopter Soc. 2004, 49, 149–159. [Google Scholar] [CrossRef]
- Taymourtash, N.; Zagaglia, D.; Zanotti, A.; Muscarello, V.; Gibertini, G.; Quaranta, G. Experimental study of a helicopter model in shipboard operations. Aerosp. Sci. Technol. 2021, 61, 97–108. [Google Scholar] [CrossRef]
- Stoll, R.; Gibbs, J.A.; Salesky, S.T.; Anderson, W.; Calaf, M. Large-Eddy Simulation of the Atmospheric Boundary Layer. Bound. Layer Meteorol. 2020, 177, 541–581. [Google Scholar] [CrossRef]
- Damle, R.; Soria, M.; Lehmkuhl, O.; Colomer, G.; Oliva, A. Large Eddy Simulation of Airflow in a Single-Family House. In Proceedings of the International High Performance Buildings Conference, West Lafayette, IN, USA, 24–28 May 2010. [Google Scholar]
- Sarlak, H. Large Eddy Simulation of Turbulent Flows in Wind Energy. Ph.D. Thesis, DTU Wind Energy, Copenhagen, Denmark, 2014. [Google Scholar]
- Gronemeler, T.; Surm, K.; Harms, F.; Leitl, B.; Maronga, B.; Raasch, S. Evaluation of the dynamic core of the PALM model system 6.0 in a neutrally stratified urban environment: Comparison between LES and wind tunnel experiments. Eur. Geosci. Union 2021, 14, 3317–3333. [Google Scholar]
- Toja-Silva, F.; Kono, T.; Peralta, C.; Lopez-Garcia, O.; Chen, J. A review of computational fluid dynamics (CFD) simulations of the wind flow around buildings for urban wind energy exploitation. J. Wind Eng. Ind. Aerodyn. 2018, 180, 66–87. [Google Scholar] [CrossRef]
- Zhang, A.; Gao, C.; Zhang, L. Numerical simulation of the wind field around different building arrangements. J. Wind Eng. Ind. Aerodyn. 2005, 93, 891–904. [Google Scholar] [CrossRef]
- Longo, R.; Ferrarotti, M.; Sanchez, C.G.; Derudi, M.; Parente, A. Advanced turbulence models and boundary conditions for flows around different configurations of ground-mounted buildings. J. Wind Eng. Ind. Aerodyn. 2017, 167, 160–182. [Google Scholar] [CrossRef]
- Hertwig, D.; Patnaik, G.; Leitl, B. LES validation of urban flow-part 1-flow statistics and frequency distribution. Environ. Fluid. Mech. 2017, 17, 521–550. [Google Scholar] [CrossRef]
- US Department of Defense Interface Standard. Flying Qualities of Piloted Aircraft (MIL-STD-1797A); Technical Report; Federal Aviation Administration (FAA): Washington, DC, USA, 2004.
- Dong, L.; Lio, W.H.; Simley, E. On turbulence models and lidar measurements for wind turbine control. Wind Energy Sci. 2021, 6, 1491–1500. [Google Scholar] [CrossRef]
- Jones, A.R.; Cetiner, O.; Smith, M.J. Physics and Modeling of Large Flow Disturbances: Discrete Gust Encounters for Modern Air Vehicles. Annu. Rev. Fluid Mech. 2022, 54, 469–493. [Google Scholar] [CrossRef]
- Tahbaz, M. Estimation of the Wind Speed in Urban Areas—Height less than 10 Metres. Int. J. Vent. 2009, 8, 75–84. [Google Scholar] [CrossRef]
- Bernard, J.; Lindberg, F.; Oswald, S. URock 2023a: An open-source GIS-based wind model for complex urban settings. Geosci. Model Dev. 2023, 16, 5703–5727. [Google Scholar] [CrossRef]
- Bozorgmehr, B.; Willemsen, P.; Margairaz, F.; Gibbs, J.A.; Patterson, Z.; Stoll, R.; Pardyjak, E.R. QES Winds v 1.0: Theory and User’s Guide; University of Utah: Salt Lake City, UT, USA, 2021. [Google Scholar]
- Pardyjak, E.R.; Brown, M.J. QUIC URB v. 1. 1 Theory and User’s Guide; Technical Report; Los Alamos National Laboratory: Los Alamos, NM, USA, 2003. [Google Scholar]
- Sharma, A.; Fernando, H.J.S.; Hamlet, A.F.; Hellmann, J.J.; Barlage, M.; Chen, F. Urban meteorological modeling using WRF: A sensitivity study. Int. J. Climatol. 2017, 37, 1885–1900. [Google Scholar] [CrossRef]
- Cheng, W.Y. A literature review of wind forecasting methods. J. Power Energy Eng. 2014, 2, 161. [Google Scholar] [CrossRef]
- Yu, E.; Xu, G.; Han, Y.; Li, Y. An efficient short-term wind speed prediction model based on cross-channel data integration and attention mechanisms. Energy 2022, 256, 124569. [Google Scholar] [CrossRef]
- Mi, L.; Han, Y.; Shen, L.; Cai, C.; Wu, T. Multi-scale numerical assessments of urban wind resource using coupled WRF-BEP and RANS Simulation: A case study. Atmosphere 2022, 13, 1753. [Google Scholar] [CrossRef]
- Tang, X.Y.; Zhao, S.; Fan, B.; Peinke, J.; Stoevesandt, B. Micro-scale wind resource assessment in complex terrain based on CFD coupled measurement from multiple masts. Appl. Energy 2019, 238, 806–815. [Google Scholar] [CrossRef]
- Mohamed, A.; Carrese, R.; Fletcher, D.F.; Watkins, S. Scale-resolving simulation to predict the updraught regions over buildings for MAV orographic lift soaring. J. Wind Eng. Ind. Aerodyn. 2015, 140, 34–48. [Google Scholar] [CrossRef]
- Xiao, D.; Heaney, C.E.; Mottet, L.; Fang, F.; Lin, W.; Navon, I.M.; Guo, Y.; Matar, O.K.; Robins, A.G.; Pain, C. A reduced order model for turbulent flows in the urban environment using machine learning. Build. Environ. 2018, 148, 323–337. [Google Scholar] [CrossRef]
- Pinto, J.G.; Neuhaus, C.P.; Leckebusch, G.C.; Reyers, M.; Kerschgens, M. Estimation of windstorm impacts over western Germany under future climate conditions using a statistical–dynamical downscaling approach. Tellus A Dyn. Meteorol. Oceanol. 2010, 62, 188–201. [Google Scholar] [CrossRef]
- Frank, H.P.; Landberg, L. Modelling the wind climate of Ireland. Bound.-Layer Meteorol. 1997, 85, 359–377. [Google Scholar] [CrossRef]
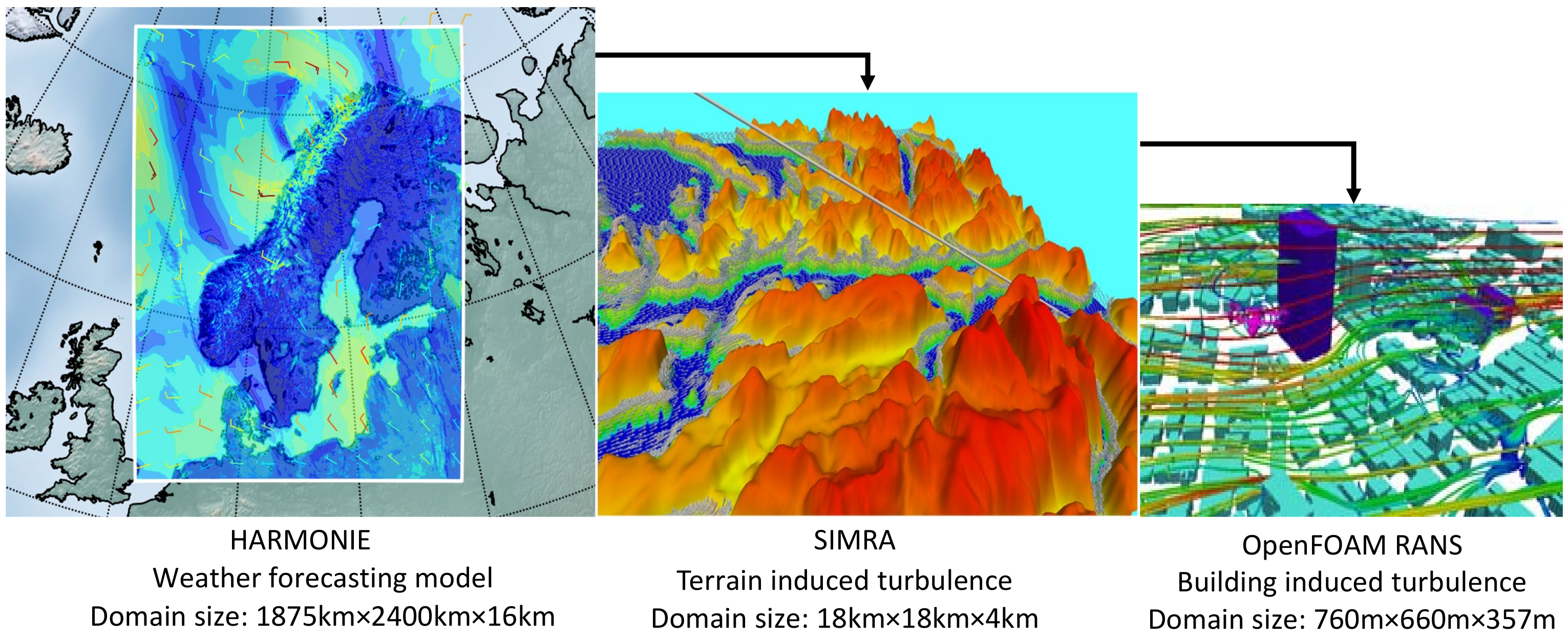
- Tabib, M.V.; Helge, S.; Rasheed, K.T. Towards understanding wind impact for drone operations: A comparison of wind models operating on different scales in a nested multiscale set-up. In Proceedings of the 14th International Conference on CFD in Oil & Gas, Metallurgical and Process Industries, Trondheim, Norway, 12–14 October 2020. [Google Scholar]
- Tabib, M.V.; Rasheed, A.; Kvamsdal, T. High-resolution CFD modelling and prediction of terrain-induced wind shear and turbulence for aviation safety. In Proceedings of the National Conference on Computational Mechanics, Austin, TX, USA, 28 July–1 August 2019. [Google Scholar]
- Chrit, M.; Majdi, M. Improving wind speed forecasting for Urban Air Mobility using coupled simulations. Adv. Meteorol. 2022, 2022, 2629432. [Google Scholar] [CrossRef]
- Seon, D.; Jeong, S. Terrain-driven wind environment generation for UAM. In Proceedings of the Asia-Pacific International Symposium on Aerospace Technology (APISAT 2021), Jeju, Republic of Korea, 15–17 November 2021. [Google Scholar]
- Seon, D.; Jeong, S. Urban wind model for UAM using two-way nested WRF-LES. In Proceedings of the Korean Society of Computational Fluid Engineering Conference, Jeju, Republic of Korea, 16–19 November 2022. [Google Scholar]
- Chrit, M. Reconstructing urban wind flows for urban air mobility using reduced-order data assimilation. Theor. Appl. Mech. Lett. 2023, 13, 100451. [Google Scholar] [CrossRef]
- Vuppala, R.K.S.S.; Kara, K. A novel approach in realistic wind data generation for the safe operation of small Unmanned Aerial Systems in Urban Environment. In Proceedings of the AIAA Aviation Forum, Virtual Event, 2–6 August 2021. [Google Scholar]
- Vuppala, R.K.S.S.; Kara, K. A non-intrusive reduced order model using deep learning for realistic wind data generation for small unmanned aerial systems in urban spaces. AIP Adv. 2022, 12, 085020. [Google Scholar] [CrossRef]
- Giersch, S.; Guernaoui, O.E.; Raasch, S.; Sauer, M. Atmosphric flow simulation strategies to assess turbulent wind conditions for safe drone operations in urban environments. J. Wind Eng. Ind. Aerodyn. 2022, 229, 105136. [Google Scholar] [CrossRef]
- Gianfelice, M.; Aboshosha, H.; Ghazal, T. Real-time Wind Predictions for Safe Drone Flights in Toronto. Results Eng. 2022, 15, 100534. [Google Scholar] [CrossRef]
- Ware, J.; Roy, N. An analysis of Wind Field Estimation and Exploitation for Quadrotor Flight in the Urban Canopy Layer. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Schweiger, K.; Schmitz, R.; Knabe, F. Impact of wind on eVTOL operations and implications for vertiport airside traffic flows: A case study of Hamburg and Munich. Drones 2023, 7, 464. [Google Scholar] [CrossRef]
- Oakey, A.; Cherrett, T. Quantifying Weather Tolerance Criteria for Delivery Drones—A UK Case Study. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023. [Google Scholar]
- Lundby, T.; Christiansen, M.P.; Jensen, K. Towards a weather analysis software framework to improve UAS Operational safety. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Somers, L.A.; Justin, C.Y.; Mavris, D.N. Wind and Obstacles Impact on Airpark Placement for STOL-based Sub-Urban Air Mobility. In Proceedings of the AIAA Aviation Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- Chan, Y.Y.; Ng, K.K.H.; Lee, C.K.M.; Hsu, L.T.; Keung, K.L. Wind dynamic and energy-efficiency path planning for unmanned aerial vehicles in the lower-level airspace and urban air mobility context. Sustain. Energy Technol. Assessments 2023, 57, 103202. [Google Scholar] [CrossRef]
- Lee, L.; Pang, B.; Low, K.H. Weather Data Analytics for safe drone operations in Low-Altitude urban environments. In Proceedings of the AIAA Aviation Forum, Chicago, IL, USA, 27 June–1 July 2022. [Google Scholar]
- Hu, X.; Pang, B.; Low, K.H. Wind patterns analysis on temporal scales for safe UAV operations using statistical approaches. In Proceedings of the IEEE & AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022. [Google Scholar]
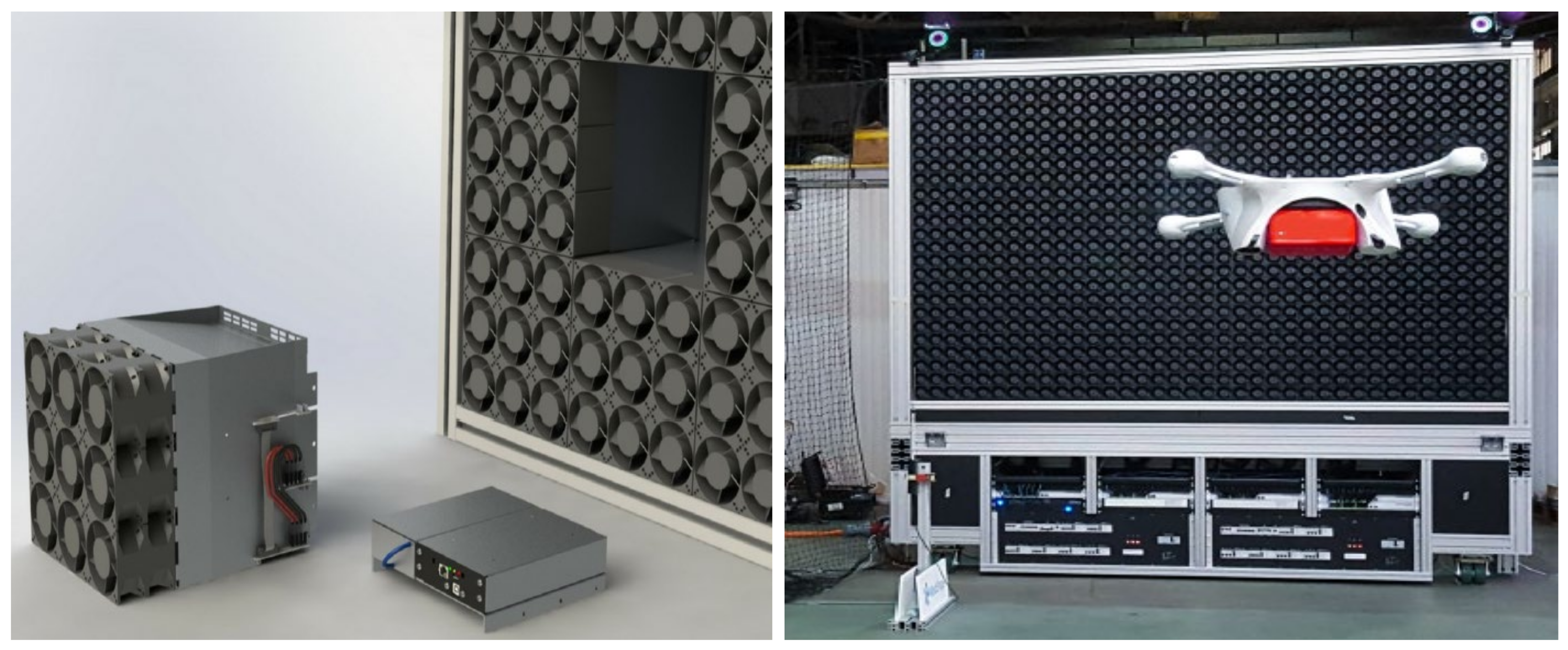
- Noca, F.; Bujard, T.; Visvaratnam, G.; Catry, G.; Bosson, N. Flow profiling in a Windshaper for Testing Free-Flying Drones in Adverse Winds. In Proceedings of the AIAA Aviation Forum, Virtual Event, 2–6 August 2021. [Google Scholar]
- Noca, F.; Catry, G.; Bosson, N.; Bardazzi, L.J.; Marquez, S.; Gros, A. Wind and weather facility for testing free-flying drones. In Proceedings of the AIAA Aviation Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- Labbad, M.A.; Wall, A.; Larose, G.L.; Khouli, F.; Barber, H. Experimental investigations into the effect of urban airflow characteristics on urban air mobility applications. J. Wind Eng. Ind. Aerodyn. 2022, 229, 105126. [Google Scholar] [CrossRef]
- Schajnoha, S.; Larose, G.L.; Labbad, M.A.; Barber, H.; Wall, A. The safety of Advanced Air Mobility and the effects of wind in the Urban canyon. In Proceedings of the 78th Vertical Flight Society Annual Forum and Technology Display, San Jose, CA, USA, 25–27 January 2022. [Google Scholar]
- Kubo, D. Gust response evaluation of small UAS via free-flight in gust wind tunnel. In Proceedings of the AIAA SciTech Forum, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Dhulipalla, A.; Han, N.; Hu, H.; Hu, H. A comparative study to characterize the effects of adverse weathers on the flight performance of an Unmanned-Aerial-System. In Proceedings of the AIAA Aviation Forum, Chicago, IL, USA, 27 June–1 July 2022. [Google Scholar]
- Robinson, M.; Klimenko, V.; Diao, Q. Validation of Simulated Urban Microscale Weather Pertinent to Aviation Interests. In Proceedings of the AIAA Aviation Forum, Virtual Event, 15–19 June 2020. [Google Scholar]
- Staningford, D.; Sequeira, C.; Allan, M.; Rider, C.; Furse, G.; Sharpe, J. Validating airspace CFD models for Drone Operation with flight test data. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- Sutherland, M. Urban Wake Field Generation Using LES for Application to Quadrotor Flight. Master’s Thesis, Department of Mechanical and Aerospace Engineering, Carleton University, Ottawa, ON, Canada, 2015. [Google Scholar]
- Galway, D.; Etele, J.; Fusina, G. Modeling of urban wind field effects on Unmanned Rotorcraft flight. J. Aircr. 2011, 48, 1613–1620. [Google Scholar] [CrossRef]
- Bahr, M.; Ferede, E.; Gandhi, F. Flight Characteristics of AAM or UAM—Scale Quadcopters Under Atmospheric Turbulence. In Proceedings of the 78th Annual Forum & Technology Display, Vertical Flight Society, Fort Worth, TX, USA, 10–12 May 2022. [Google Scholar]
- Ji, H.; Chen, R.; Lu, L.; White, M.D. Pilot workload investigation for rotorcraft operation in low-altitude atmospheric turbulence. Aerosp. Sci. Technol. 2021, 111, 106567. [Google Scholar] [CrossRef]
- Jones, J.C.; Bonin, T.; Mitchell, E. Evaluating Wind Hazards for Advanced Air Mobility Operations. In Proceedings of the AIAA Aviation Forum, San Diego, CA, USA, 12–16 June 2023. [Google Scholar]
- Mohamed, A.; Marino, M.; Watkins, S.; Jaworski, J.; Jones, A. Gusts Encountered by Flying Vehicles in Proximity to Buildings. Drones 2023, 7, 22. [Google Scholar] [CrossRef]
- Abichandani, P.; Lobo, D.; Ford, G.; Bucci, D.; Kam, M. Wind Measurement and Simulation Techniques in Multi-rotor Small Unmanned Aerial Vehicles. IEEE Access 2020, 8, 54910–54927. [Google Scholar] [CrossRef]
- Adkins, K.A. Urban flow and small unmanned aerial system operations in the built environment. Int. J. Aviat. Aeronaut. Aerosp. 2019, 6, 10. [Google Scholar] [CrossRef]
- García-Gutiérrez, A.; Gonzalo, J.; López, D.; Delgado, A. Advances in CFD Modeling of Urban Wind Applied to Aerial Mobility. Fluids 2022, 7, 246. [Google Scholar] [CrossRef]
- Adkins, K.A.; Akbas, M.; Compere, M. Real-time Urban Weather Observations for Urban Air Mobility. Int. J. Aviat. Aeronaut. Aerosp. 2020, 7, 11. [Google Scholar] [CrossRef]
- Akbas, M.I.; Adkins, K.A.; Compere, M. Real-Time urban observations for Aviation. In Proceedings of the AIAA Aviation Forum, Virtual Event, 2–6 August 2021. [Google Scholar]
- Deskos, G.; del Carre, A.; Palacios, R. Assessment of low-altitude atmospheric turbulence models for aircraft aeroelasticity. J. Fluids Struct. 2020, 95, 102981. [Google Scholar] [CrossRef]
- Willhite, T.L.; Jacob, J.D. Intercomparison of ground and aerial systems for urban advanced air mobility wind field campaigns. In Proceedings of the AIAA SciTech Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar]
- Chrit, M.; Berchoff, D. Weather solutions for VTOL aircraft urban operations. In Proceedings of the VFS Aeromechanics for Advanced Vertical Flight Technical Meeting, San Jose, CA, USA, 25–27 January 2022. [Google Scholar]
- Tabassum, A.; DeSantis, M.; Bai, H.; Fala, N. Preliminary Design of Wind-Aware sUAS Simulation Pipeline for Urban Air Mobility. In Proceedings of the AIAA Aviation Forum, Chicago, IL, USA, 27 June–1 July 2022. [Google Scholar]
- Tabassum, A.; Bai, H.; Fala, N. A Study on Workload Assessment and Usability of Wind-Aware User Interface for Small Unmanned Aircraft System Remote Operations. In HCI International 2023—Late Breaking Papers; Kurosu, M., Hashizume, A., Marcus, A., Rosenzweig, E., Soares, M.M., Harris, D., Li, W.C., Schmorrow, D.D., Fidopiastis, C.M., Rau, P.L.P., Eds.; Springer Nature: Cham, Switzerland, 2023; pp. 444–460. [Google Scholar]
- Hoblit, F.M. Gust Loads on Aircraft: Concepts and Applications; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 1988. [Google Scholar]
- Jonkman, B.J. TurbSim User’s Guide v2.00.00; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2016.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Atmospheric Disturbance | Notes | Probability |
|---|---|---|
| Light | No appreciable turbulence and steady-state winds less than 3 knots with no appreciable gusts. | |
| Moderate | Light to moderate turbulence. Changes in altitude and/or attitude occur. Usually causes variations in indicated airspeed. | TBD |
| Severe | Turbulence that causes large, abrupt deviations in altitude and/or attitude. Usually causes large variations in indicated airspeed. | TBD |
| Model Type | Simulation Time | Resolution | Accuracy | Remarks |
|---|---|---|---|---|
| Experimental methods | ||||
| Wind tunnel | - | - | High |
|
| CFD-based methods | ||||
| LES | Hours–days | Micro-/meso-scale | High |
|
| RANS | Hours | Micro-/meso-scale | Medium |
|
| Spectral methods | ||||
| von Kármán, Dryden, Kaimal, Mann | Seconds–minutes | Mesoscale | Low |
|
| Semi-empirical methods | ||||
| Lagrangian, Eulerian | Seconds–minutes | Micro-/meso-scale | Low compared to CFD-based methods |
|
| WRF | Minutes–hours | Mesoscale | High compared to other semi-empirical methods |
|
| Statistical methods | ||||
| Machine learning, Artificial Intelligence-based | Depends on the samples used for training | Depends on the samples used for training | As accurate as the training samples |
|
| Hybrid methods | ||||
| CFD + semi-empirical, CFD + statistical | Hours–days | Micro-/meso-scale | High |
|
| S. No. | Category | Category Description | Papers |
|---|---|---|---|
| Cluster 1 | Hybrid | Papers that utilize a combination of atmospheric wind modelling types. | [63,64,65,66,67,68,69,70,71,72,73] |
| Cluster 2 | Historical weather data | Papers that use historical weather observation data from satellites, sensors, etc. | [74,75,76,77,78,79,80] |
| Cluster 3 | Experimental | Papers that generate data through experimental techniques such as wind tunnel, etc. | [81,82,83,84,85,86] |
| Cluster 4 | CFD | Papers that employ CFD models to simulate wind data. | [87,88,89,90] |
| Cluster 5 | Spectral | Papers that compute wind data based on spectral methods like von Kármán, Dryden, etc. | [91,92] |
| Cluster 6 | Semi-empirical | Papers that exploit Eulerian/Lagrangian semi-empirical approaches to simulate wind fields. | [93] |
| Cluster 7 | Miscellaneous | Literature review papers, papers that suggest novel nontechnical ideas, etc. | [94,95,96,97,98,99,100,101,102,103,104] |
| Wind Model Type | UAM Application Scenarios a | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| Wind tunnel tests | 🗸 | 🗸 | 🗸 | |||
| WindShape | 🗸 | |||||
| DNS | 🗸 | |||||
| LES | 🗸 | |||||
| RANS | 🗸 | 🗸 | ||||
| WRF | 🗸 | |||||
| Kaimal, Mann | 🗸 | |||||
| Historical data | 🗸 | |||||
| WRF + CFD | 🗸 | 🗸 | 🗸 | |||
| Highly parameterized models b | 🗸 | 🗸 | 🗸 | 🗸 | 🗸 | |
| CFD ROMs | 🗸 | 🗸 | ||||
| ML + CFD | 🗸 | 🗸 | 🗸 | |||
| von Kármán, Dryden | 🗸 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nithya, D.S.; Quaranta, G.; Muscarello, V.; Liang, M. Review of Wind Flow Modelling in Urban Environments to Support the Development of Urban Air Mobility. Drones 2024, 8, 147. https://doi.org/10.3390/drones8040147
Nithya DS, Quaranta G, Muscarello V, Liang M. Review of Wind Flow Modelling in Urban Environments to Support the Development of Urban Air Mobility. Drones. 2024; 8(4):147. https://doi.org/10.3390/drones8040147
Chicago/Turabian StyleNithya, D S, Giuseppe Quaranta, Vincenzo Muscarello, and Man Liang. 2024. "Review of Wind Flow Modelling in Urban Environments to Support the Development of Urban Air Mobility" Drones 8, no. 4: 147. https://doi.org/10.3390/drones8040147
APA StyleNithya, D. S., Quaranta, G., Muscarello, V., & Liang, M. (2024). Review of Wind Flow Modelling in Urban Environments to Support the Development of Urban Air Mobility. Drones, 8(4), 147. https://doi.org/10.3390/drones8040147