
Proposal of Practical Sound Source Localization Method Using Histogram and Frequency Information of Spatial Spectrum for Drone Audition


Abstract
:1. Introduction
- High resolution: High-resolution SSL of the direction of the target sound source is required to accurately locate a victim.
- High noise tolerance: Because drones generate a large amount of ego-noise, high noise tolerance is required. In addition, ego-noise changes dynamically over time, so tolerance for dynamic noise is also required.
- Large search range: For prompt search operations, the range that can be localized in a single measurement must be large.
- High real-time performance: Real-time performance is important for prompt search operations. For high real-time performance, the computational cost must be low.
- High versatility: The method must be able to localize in any situation and with any drone.
2. Methods
2.1. SEVD-MUSIC
2.2. HIST-MUSIC
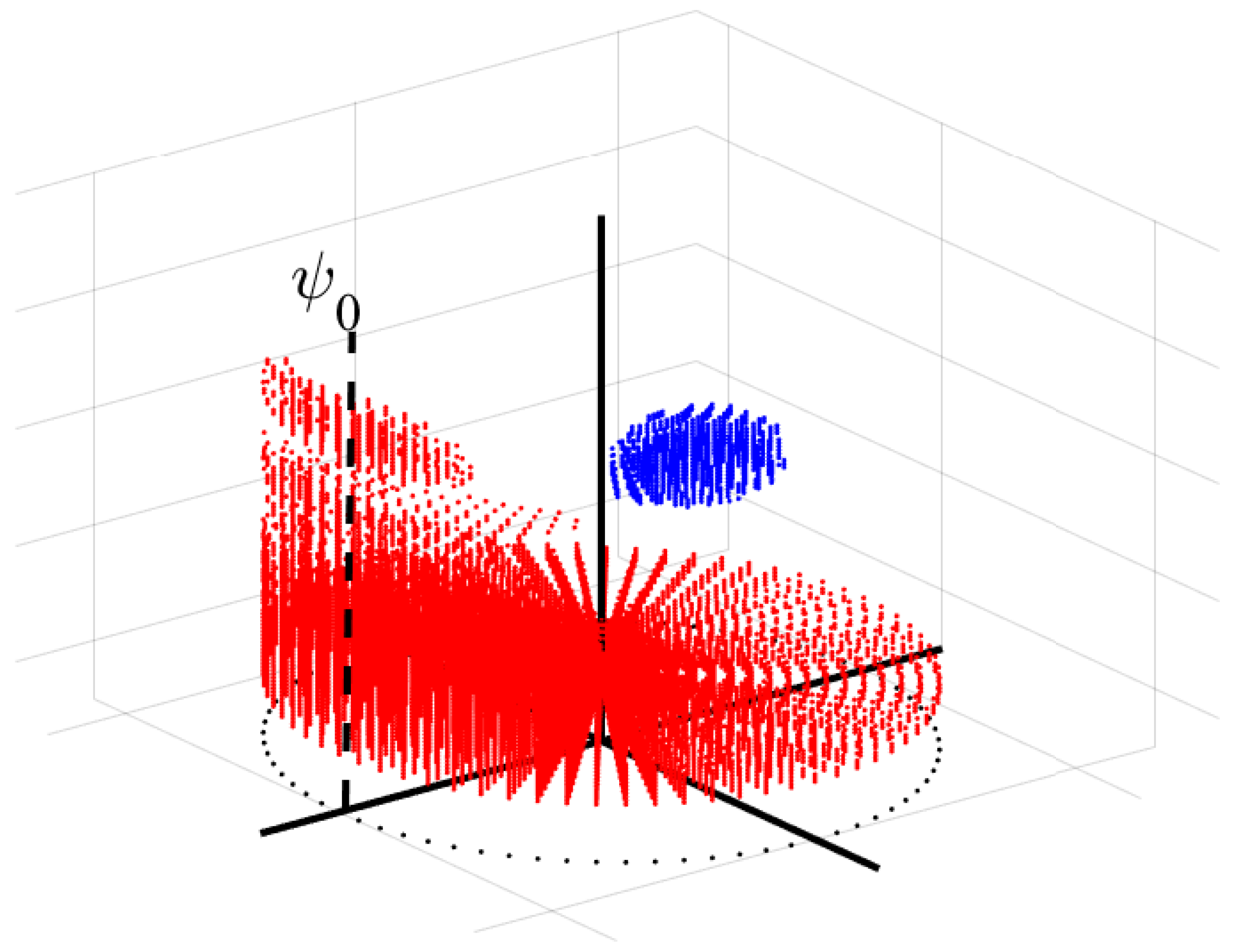
2.3. HIST-MUSIC-3D
3. Evaluation Experiments
3.1. Experimental Procedure
3.2. Results
3.3. Discussion
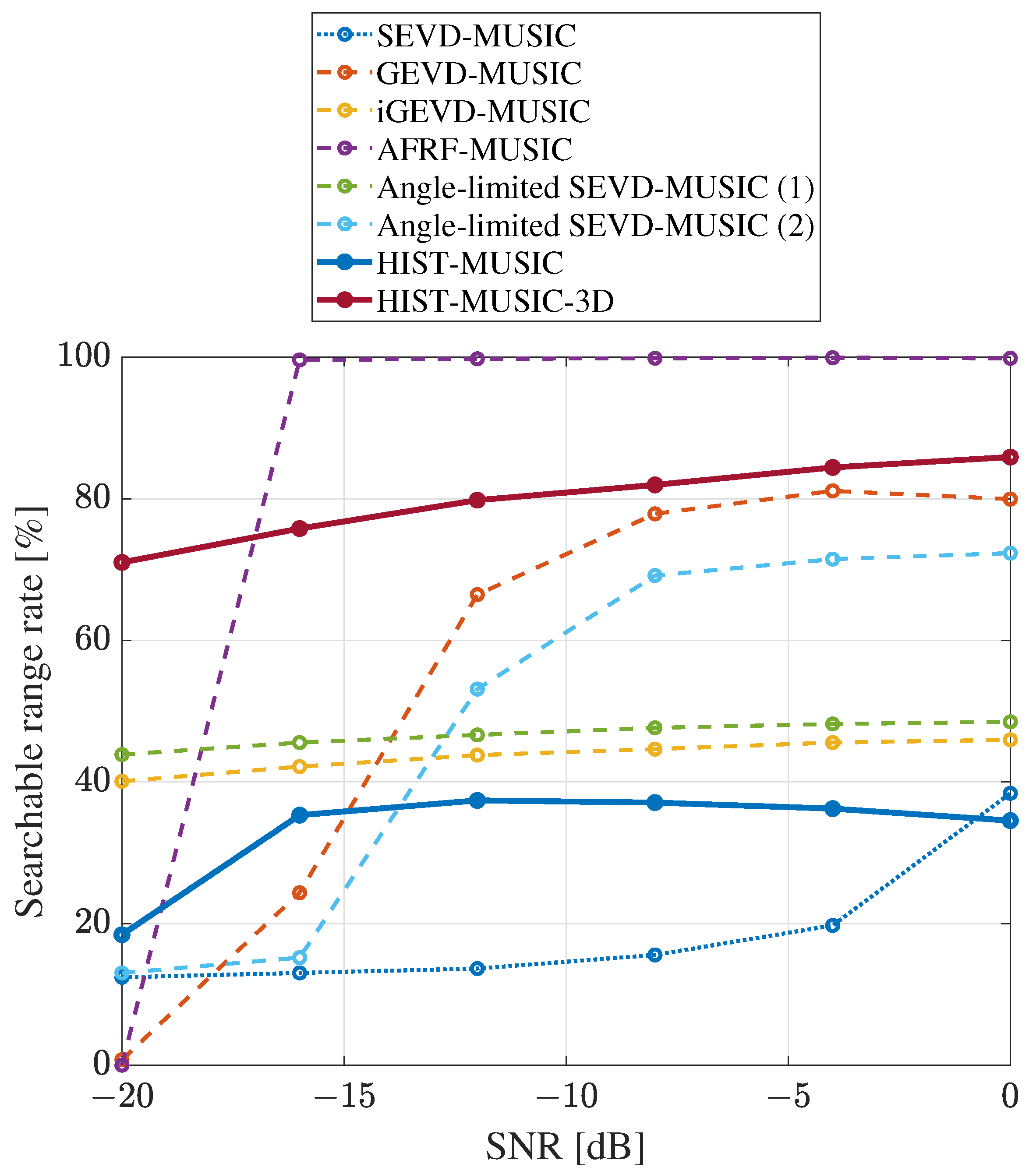
3.3.1. Tolerance for Dynamic Noise and Searchable Range
3.3.2. Real-Time Performance
3.3.3. Versatility
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- World Health Organization. Türkiye Earthquake: External Situation Report no. 4: 6–12 March 2023. Available online: https://www.who.int/europe/publications/i/item/WHO-EURO-2023-7145-46911-68727 (accessed on 24 March 2023).
- World Health Organization. Whole of Syria: Situation Report, 3–12 March 2023. Available online: https://www.emro.who.int/images/stories/syria/whole-of-syria-sit-rep-6-12-march-2023.pdf (accessed on 24 March 2023).
- Tadokoro, S. Disaster Robotics: Results from the ImPACT Tough Robotics Challenge; Springer: Berlin, Germany, 2019; pp. 1–528. [Google Scholar]
- Quan, A.; Herrmann, C.; Soliman, H. Project Vulture: A Prototype for Using Drones in Search and Rescue Operations. In Proceedings of the 15th International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini, Greece, 29–31 May 2019; pp. 619–624. [Google Scholar] [CrossRef]
- Sambolek, S.; Ivasic-Kos, M. Automatic Person Detection in Search and Rescue Operations Using Deep CNN Detectors. IEEE Access 2021, 9, 37905–37922. [Google Scholar] [CrossRef]
- Tanida, N. What happened to elderly people in the great Hanshin earthquake. BMJ 1996, 313, 1133–1135. [Google Scholar] [CrossRef] [PubMed]
- Go, Y.-J.; Choi, J.-S. An Acoustic Source Localization Method Using a Drone-Mounted Phased Microphone Array. Drones 2021, 5, 75. [Google Scholar] [CrossRef]
- Wang, L.; Cavallaro, A. Deep Learning Assisted Time-Frequency Processing for Speech Enhancement on Drones. IEEE Trans. Emerg. Top. Comput. Intell. 2021, 5, 871–881. [Google Scholar] [CrossRef]
- Strauss, M.; Mordel, P.; Miguet, V.; Deleforge, A. DREGON: Dataset and Methods for UAV-Embedded Sound Source Localization. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Ishiki, T.; Washizaki, K.; Kumon, M. Evaluation of Microphone Array for Multirotor Helicopters. J. Robot. Mechatron. 2017, 29, 168–176. [Google Scholar] [CrossRef]
- Nonami, K.; Hoshiba, K.; Nakadai, K.; Kumon, M.; Okuno, H.G.; Tanabe, Y.; Yonezawa, K.; Tokutake, H.; Suzuki, S.; Yamaguchi, K.; et al. Recent R&D Technologies and Future Prospective of Flying Robot in Tough Robotics Challenge. In Disaster Robotics; Tadokoro, S., Ed.; Springer: Cham, Switzerland, 2019; pp. 77–142. [Google Scholar] [CrossRef]
- Madokoro, H.; Yamamoto, S.; Watanabe, K.; Nishiguchi, M.; Nix, S.; Woo, H.; Sato, K. Prototype Development of Cross-Shaped Microphone Array System for Drone Localization Based on Delay-and-Sum Beamforming in GNSS-Denied Areas. Drones 2021, 5, 123. [Google Scholar] [CrossRef]
- Noda, R.; Nakata, T.; Senda, K.; Liu, H. Multi-scale morphological effect on noise level and frequency characteristics of drone propellers. In Proceedings of the Quiet Drones, Paris, France, 19–21 October 2020. [Google Scholar]
- Hoshiba, K.; Noda, R.; Nakata, T.; Liu, H.; Senda, K.; Nakadai, K.; Kumon, M.; Okuno, H.G. Development of surface-processed low-noise propeller for search and rescue tasks with drone audition. In Proceedings of the Quiet Drones, Paris, France, 19–21 October 2020. [Google Scholar]
- Noda, R.; Nakata, T.; Senda, K.; Liu, H. Development of Microstructured Low Noise Propeller for Aerial Acoustic Surveillance. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Japan, 11–14 January 2021; pp. 482–486. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Nakamura, K.; Nakadai, K.; Asano, F.; Hasegawa, Y.; Tsujino, H. Intelligent sound source localization for dynamic environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), St. Louis, MO, USA, 10–15 October 2009; pp. 664–669. [Google Scholar] [CrossRef]
- Nakamura, K.; Nakadai, K.; Ince, G. Real-time super-resolution Sound Source Localization for robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 694–699. [Google Scholar] [CrossRef]
- Okutani, K.; Yoshida, T.; Nakamura, K.; Nakadai, K. Outdoor auditory scene analysis using a moving microphone array embedded in a quadrocopter. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 3288–3293. [Google Scholar] [CrossRef]
- Ohata, T.; Nakamura, K.; Mizumoto, T.; Tezuka, T.; Nakadai, K. Improvement in outdoor sound source detection using a quadrotor-embedded microphone array. In Proceedings of the IEEE/RSJ International Conference on Robots and Intelligent Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 1902–1907. [Google Scholar] [CrossRef]
- Hoshiba, K.; Washizaki, K.; Wakabayashi, M.; Ishiki, T.; Kumon, M.; Bando, Y.; Gabriel, D.; Nakadai, K.; Okuno, H.G. Design of UAV-Embedded Microphone Array System for Sound Source Localization in Outdoor Environments. Sensors 2017, 17, 2535. [Google Scholar] [CrossRef] [PubMed]
- Hoshiba, K.; Nakadai, K.; Kumon, M.; Okuno, H.G. Assessment of Music-Based Noise-Robust Sound Source Localization with Active Frequency Range Filtering. J. Robot. Mechatron. 2018, 30, 426–435. [Google Scholar] [CrossRef]
- Komatsuzaki, I.; Hoshiba, K.; Takeda, Y.; Sugahara, Y. Propopsal of noise-robust sound source localization method using histogram information for quickly changing dynamic noise. In Proceedings of the 40th Annual Conference of the Robotics Society if Japan, Tokyo, Japan, 5–9 September 2022. (In Japanese). [Google Scholar]
- Mori, S.; Hirata, S.; Yamaguchi, T.; Hachiya, H. Quantitative evaluation method for liver fibrosis based on multi-Rayleigh model with estimation of number of tissue components in ultrasound B-mode image. Jpn. J. Appl. Phys. 2018, 57, 07LF17. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Tolerance for Static Noise | Tolerance for Dynamic Noise (Slowly Changing) | Tolerance for Dynamic Noise (Quickly Changing) | Search Range | Real-Time Performance | Versatility |
|---|---|---|---|---|---|---|
| SEVD-MUSIC | × | × | × | ◯ | ◯ | ◯ |
| GEVD-MUSIC | ◯ | × | × | ◯ | × | × |
| GSVD-MUSIC | ||||||
| iGEVD-MUSIC | ◯ | ◯ | × | ◯ | × | ◯ |
| iGSVD-MUSIC | ||||||
| Angle-limited | ◯ | × | × | × | ◯ | × |
| SEVD-MUSIC | ||||||
| AFRF-MUSIC | ◯ | ◯ | × | ◯ | ◯ | ◯ |
| 1. SEVD-MUSIC |
| 2. GEVD-MUSIC |
| 3. iGEVD-MUSIC |
| 4. AFRF-MUSIC |
| 5. Angle-limited SEVD-MUSIC (1) (Azimuth range: deg.) |
| 6. Angle-limited SEVD-MUSIC (2) (Azimuth range: deg.) |
| 7. HIST-MUSIC |
| 8. HIST-MUSIC-3D |
| Method | RTF |
|---|---|
| SEVD-MUSIC | 0.92 |
| GEVD-MUSIC | 1.09 |
| iGEVD-MUSIC | 1.23 |
| AFRF-MUSIC | 0.18 |
| Angle-limited SEVD-MUSIC (1) | 0.54 |
| Angle-limited SEVD-MUSIC (2) | 0.73 |
| HIST-MUSIC | 0.93 |
| HIST-MUSIC-3D | 0.97 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoshiba, K.; Komatsuzaki, I.; Iwatsuki, N. Proposal of Practical Sound Source Localization Method Using Histogram and Frequency Information of Spatial Spectrum for Drone Audition. Drones 2024, 8, 159. https://doi.org/10.3390/drones8040159
Hoshiba K, Komatsuzaki I, Iwatsuki N. Proposal of Practical Sound Source Localization Method Using Histogram and Frequency Information of Spatial Spectrum for Drone Audition. Drones. 2024; 8(4):159. https://doi.org/10.3390/drones8040159
Chicago/Turabian StyleHoshiba, Kotaro, Izumi Komatsuzaki, and Nobuyuki Iwatsuki. 2024. "Proposal of Practical Sound Source Localization Method Using Histogram and Frequency Information of Spatial Spectrum for Drone Audition" Drones 8, no. 4: 159. https://doi.org/10.3390/drones8040159
APA StyleHoshiba, K., Komatsuzaki, I., & Iwatsuki, N. (2024). Proposal of Practical Sound Source Localization Method Using Histogram and Frequency Information of Spatial Spectrum for Drone Audition. Drones, 8(4), 159. https://doi.org/10.3390/drones8040159