
Development of an Analytical Model to Predict Stress–Strain Curves of Short Fiber-Reinforced Polymers with Six Independent Parameters



Abstract
:1. Introduction
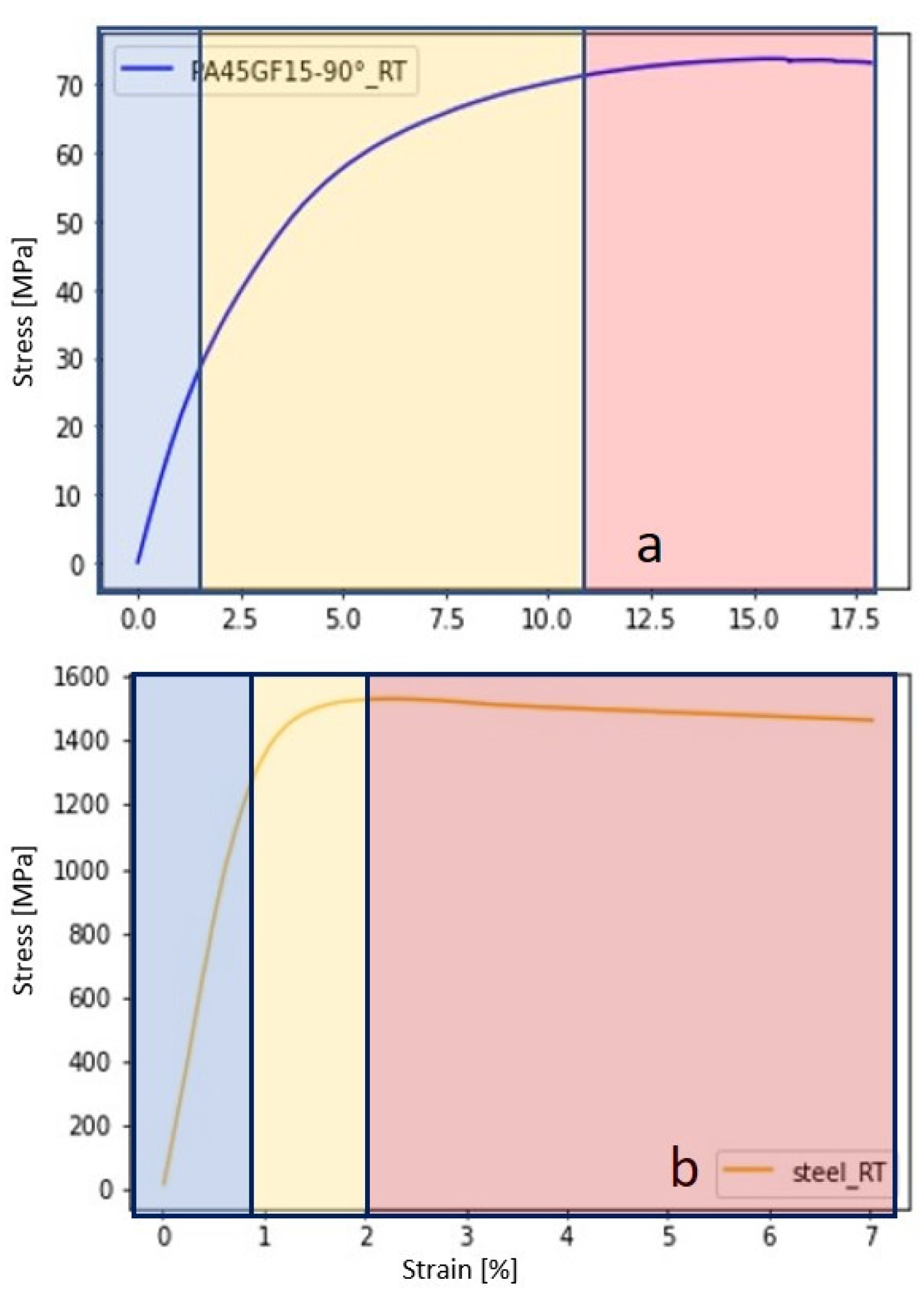
- Linear part: the part of stress–strain curve before the elastic limit (blue part in Figure 1a).
- Onset of the bend: This is the part of the stress–strain curve where the graph starts following a curve. The end-limit of this part will be the start of a line. This limit can be calculated through trial and error and can vary with material composition. This can also be referred to as the elasto–plastic region in the case of metals (yellow part in Figure 1a).
- Offset of the bend: This part of the stress–strain curve is approximately linear after the bend. This can also be referred to as the plastic region. This curve starts from the offset of the bend until fracture of the specimen (red part in Figure 1a).
2. Methodology and Experiment
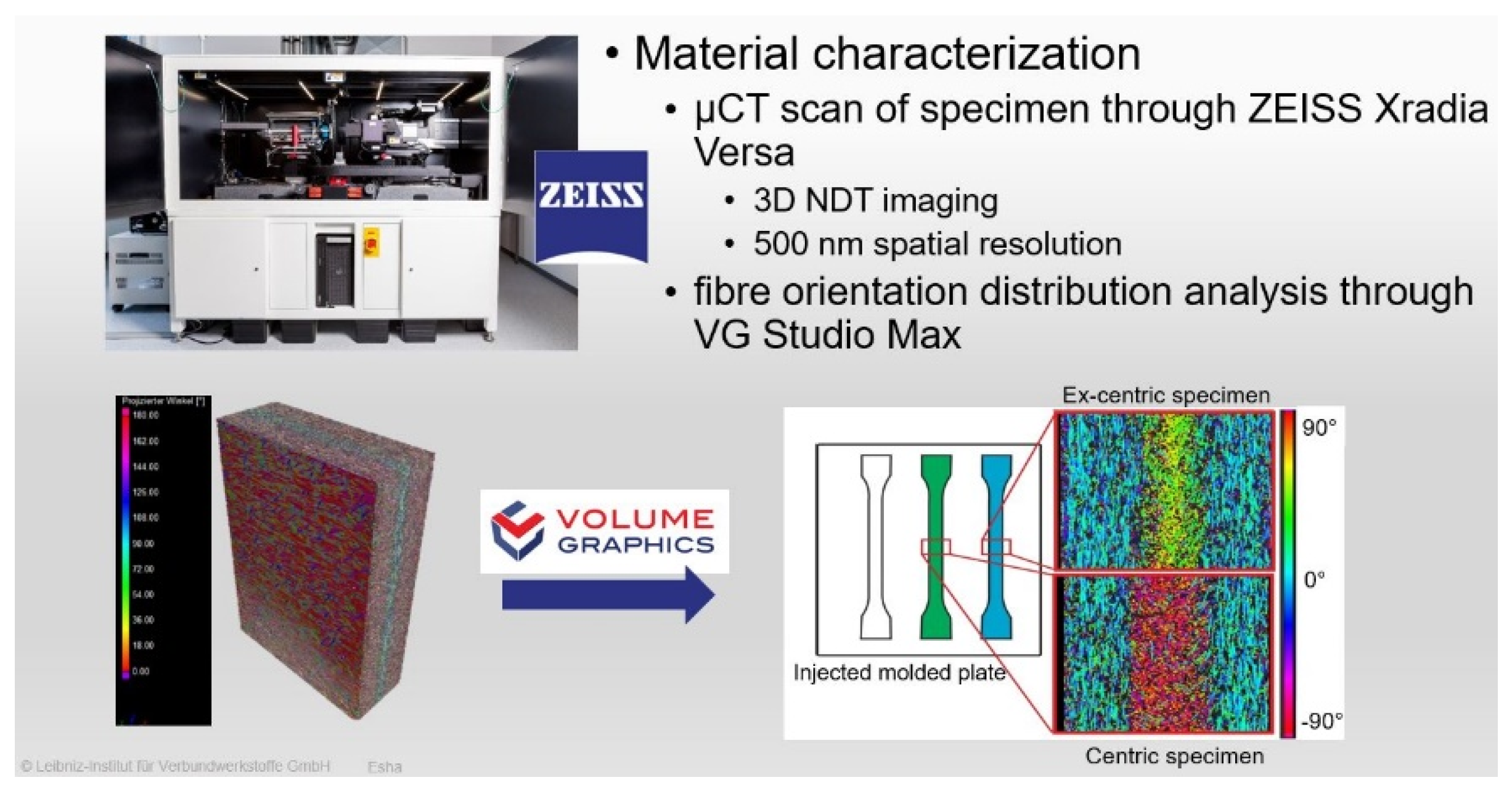
2.1. Fiber Orientation Distribution Analysis
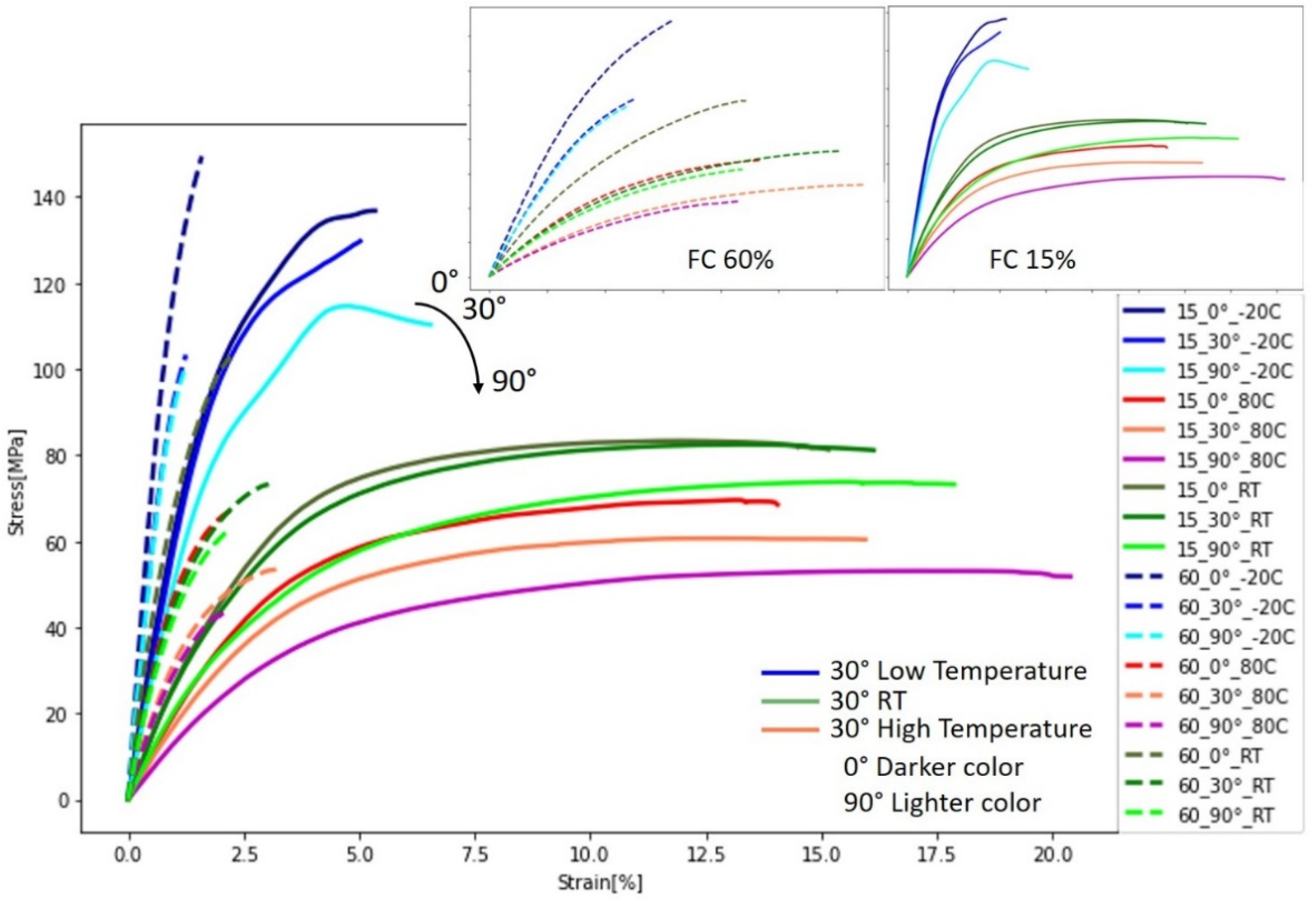
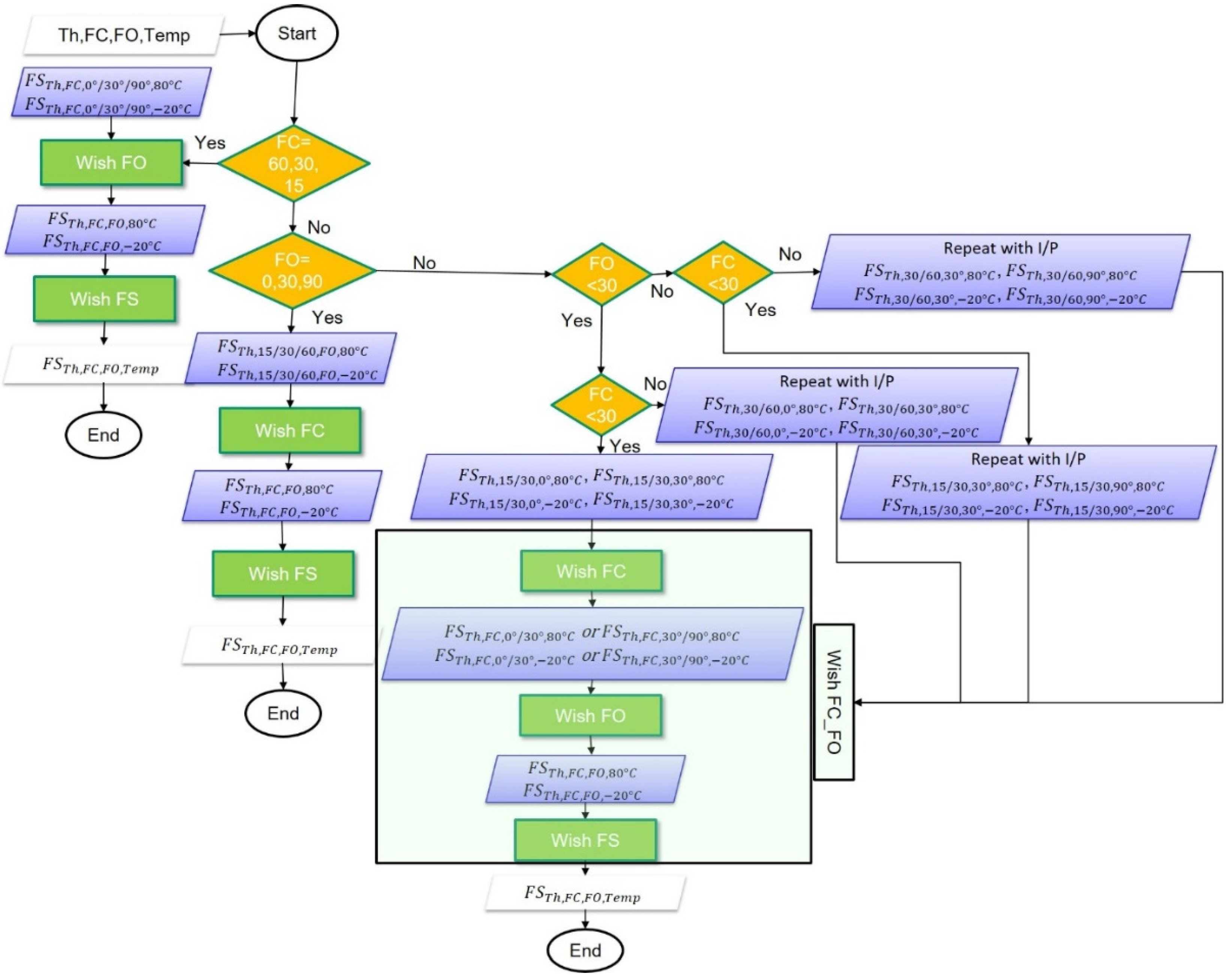
2.2. Test Matrix
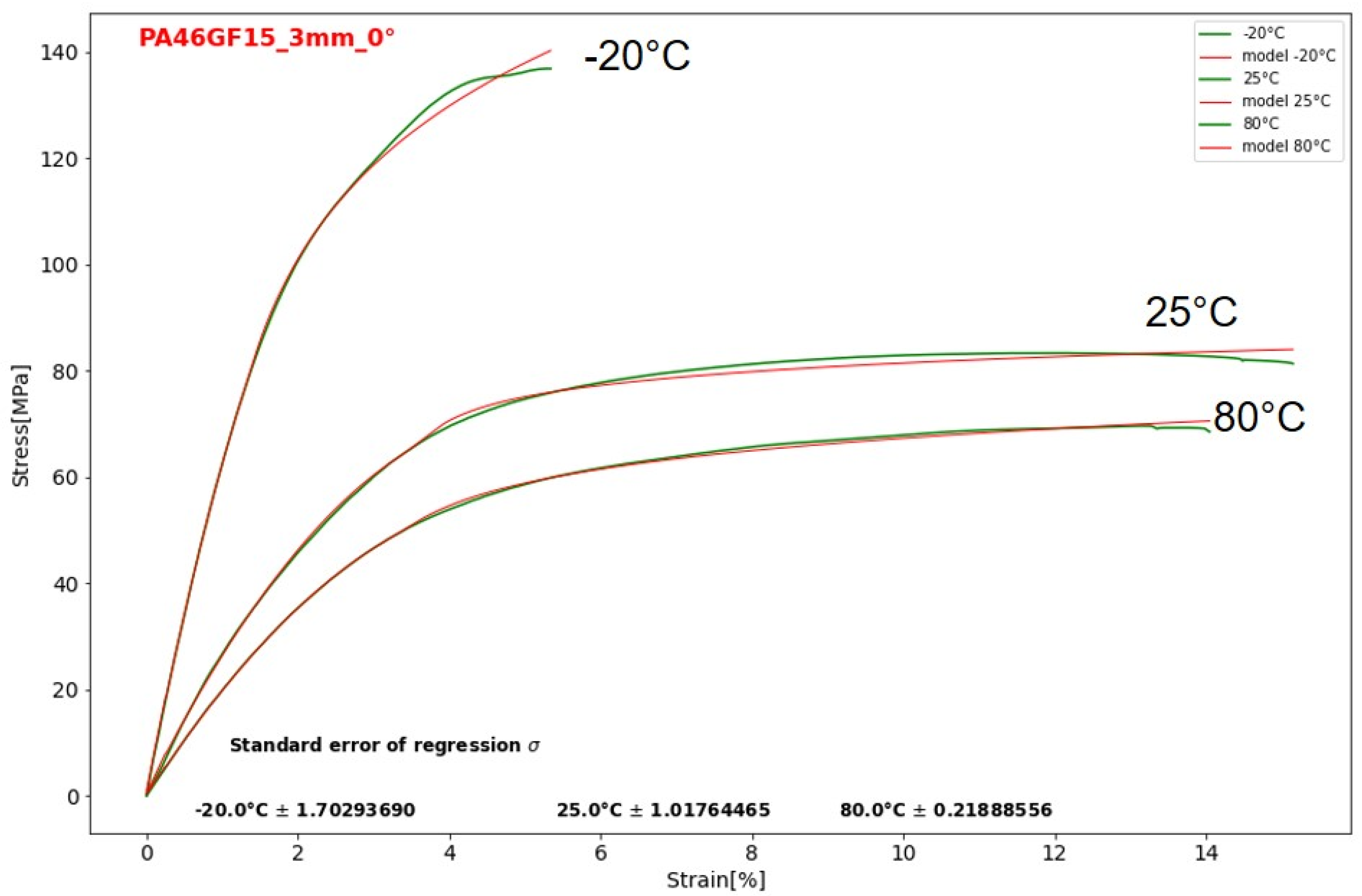
2.3. Experimental Observation
2.4. Analytical Approach
2.5. Analytical Model to Predict Fracture Strain and Fitting Parameters
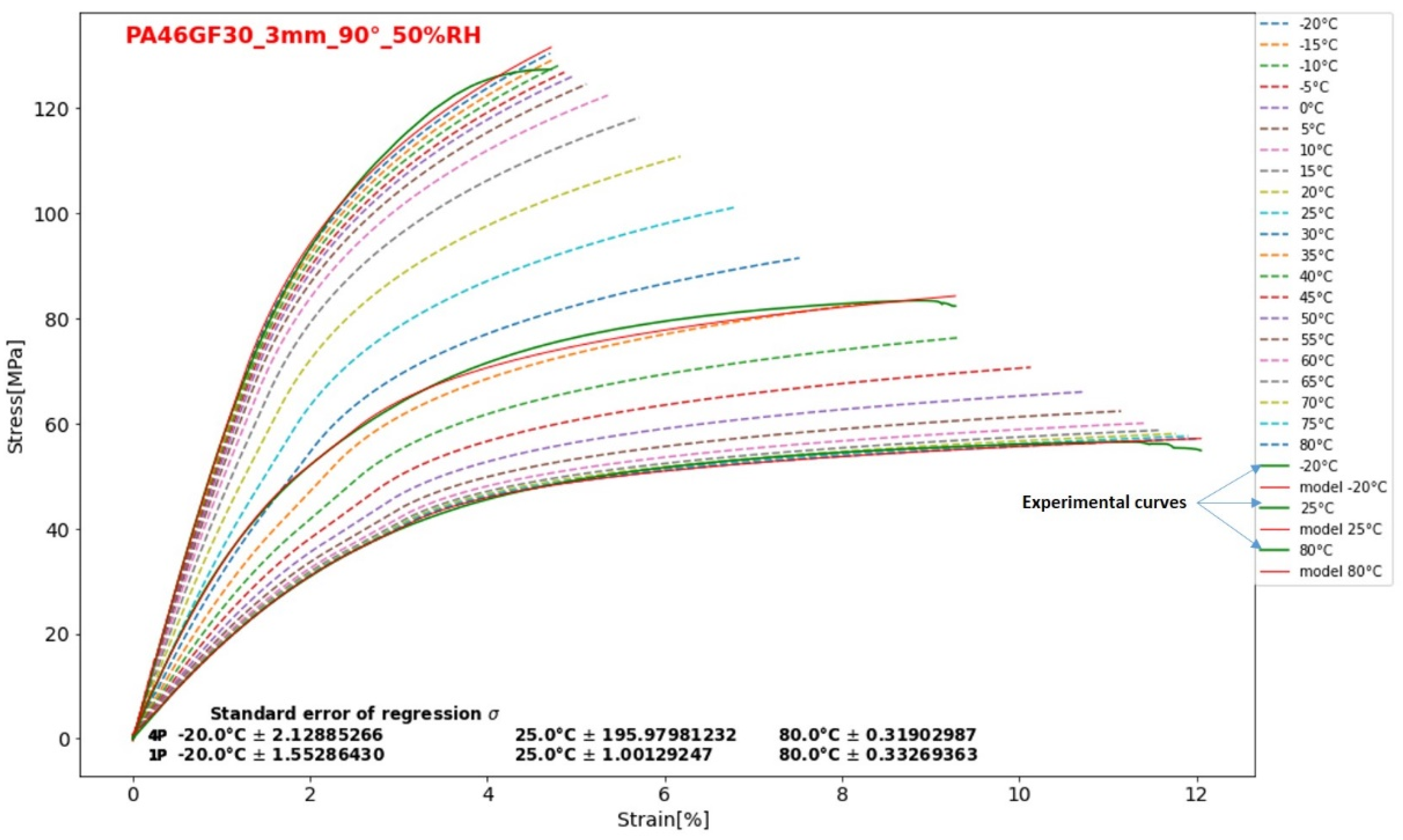
3. Comparison of Analytical Models with Experimental Data
3.1. 1P Model with One Independent Variable
3.2. 4P Model with Four Independent Variables
4. Discussion and Conclusions
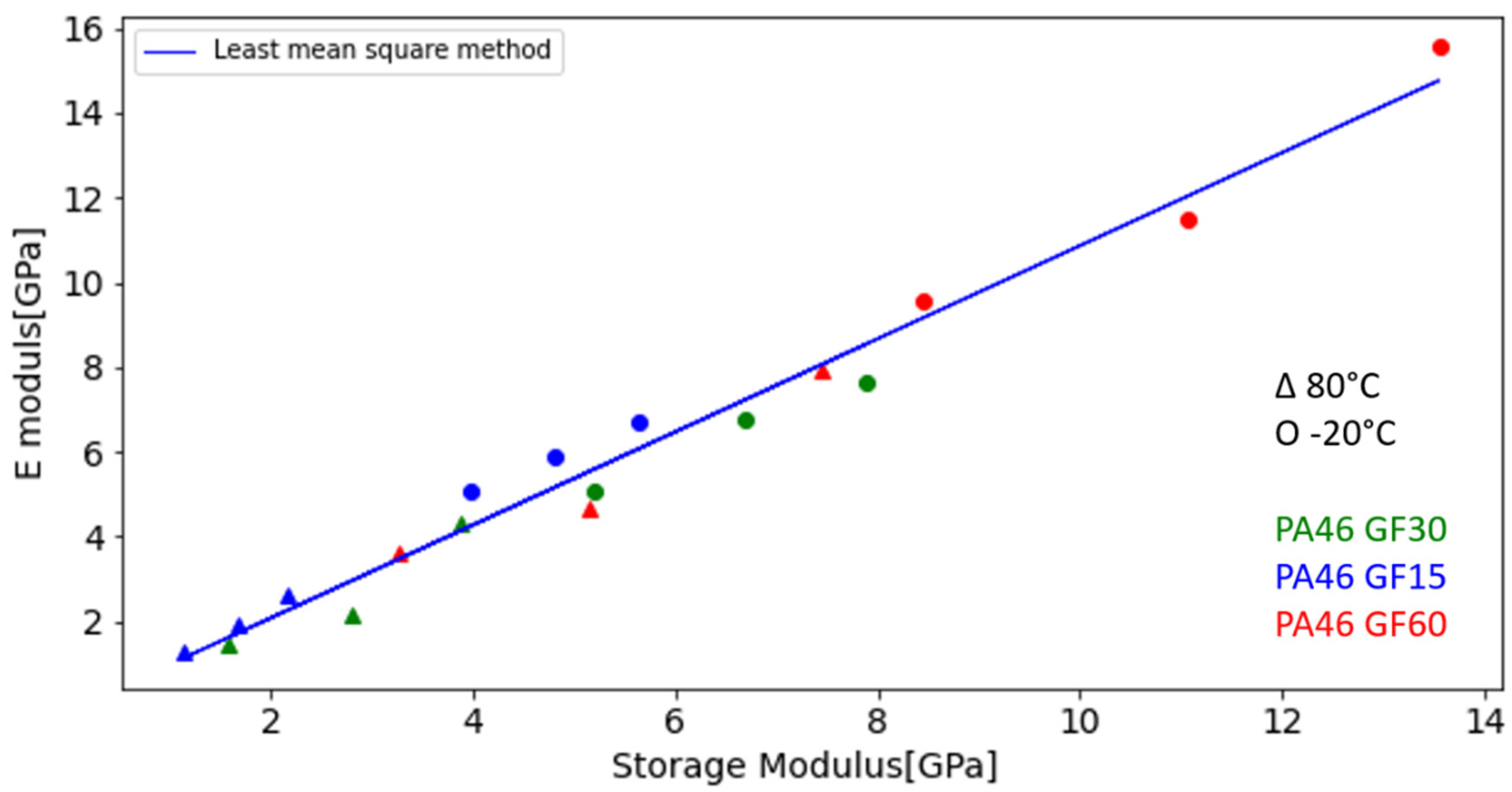
- The stiffness of the material is predicted through the storage modulus. The frequency used for DMTA analysis is 10 Hz. It is assumed that the DMTA test at this frequency can be similar to the quasi-static tensile test.
- The variation of the stiffness of the material with respect to fiber orientation is assumed to be linear due to a lack of experimental points.
- It is assumed that the fracture strain and fitting parameters of all mathematical functions follow the same storage modulus curve from DMTA [33].
Author Contributions
Funding
Conflicts of Interest
References
- Gohari, S.; Sharifi, S.; Burvill, C.; Mouloodi, S.; Izadifar, M.; Thissen, P. Localized failure analysis of internally pressurized laminated ellipsoidal woven GFRP composite domes: Analytical, numerical, and experimental studies. Arch. Civ. Mech. Eng. 2019, 19, 1235–1250. [Google Scholar] [CrossRef]
- Rief, T.; Schmidt, S. Microstructural Analysis of Fiber-Reinforced Injection Molding Material and Its Influence on Mechanical Properties. Available online: https://www.researchgate.net/publication/357281009_Microstructural_Analysis_of_Fiber_Reinforced_Injection_Molding_Material_and_its_Influence_on_Mechanical_Properties (accessed on 30 March 2022).
- Wang, Y.; Wang, H.; Wei, J.; Lin, B.; Xu, J.; Fang, S. Finite element analysis of grinding process of long fiber reinforced ceramic matrix woven composites: Modeling, experimental verification and material removal mechanism. Ceram. Int. 2019, 45, 15920–15927. [Google Scholar] [CrossRef]
- Gohari, S.; Mozafari, F.; Moslemi, N.; Mouloodi, S.; Sharifi, S.; Rahmanpanah, H.; Burvill, C. Analytical solution of the electro-mechanical flexural coupling between piezoelectric actuators and flexible-spring boundary structure in smart composite plates. Arch. Civ. Mech. Eng. 2021, 21, 33. [Google Scholar] [CrossRef]
- Jones, R.M. Mechanics of Composite Materials, 2nd ed.; Taylor & Francis: Philadelphia, PA, USA, 1999; ISBN 978-1-56032-712-7. [Google Scholar]
- Hausmann, J.E.; Schmidt, S.; Krummenacker, J. Transfer of mechanical properties from specimens to injection molded structures under consideration of local fiber orientation. In Proceedings of the European Congress and Exhibition on Advanced Materials and Processes-Euromat, Graz, Austria, 12–16 September 2021.
- Ramberg, W.; Osgood, W.R. Description of Stress-Strain Curve by Three Parameters; National Advisory Committee for Aeronautics: Washington, DC, USA, 1943; p. 29. [Google Scholar]
- Hill, H.N. Determination of stress-Strain Relations from “OFFSET” Yield Strength Values; National Advisory Committee for Aeronautics: Washington, DC, USA, 1944; p. 11. [Google Scholar]
- Kamaya, M. Ramberg–Osgood type stress–strain curve estimation using yield and ultimate strengths for failure assessments. Int. J. Press. Vessels Pip. 2016, 137, 1–12. [Google Scholar] [CrossRef]
- Rasmussen, K.J.R. Full-range stress–strain curves for stainless steel alloys. J. Constr. Steel Res. 2003, 59, 47–61. [Google Scholar] [CrossRef]
- Stephens, R.I.; Fuchs, H.O. (Eds.) Metal Fatigue in Engineering, 2nd ed.; Wiley: New York, NY, USA, 2001; ISBN 978-0-471-51059-8. [Google Scholar]
- Gadamchetty, G.; Pandey, A.; Gawture, M. On Practical Implementation of the Ramberg-Osgood Model for FE Simulation. SAE Int. J. Mater. Manuf. 2016, 9, 200–205. [Google Scholar] [CrossRef]
- Probabilistic Model Code, Part-3: Resistance Model. 2006. Available online: https://www.jcss-lc.org/publications/jcsspmc/concrete.pdf (accessed on 30 March 2022).
- Gruber, G.; Haimerl, A.; Wartzack, S. Consideration of orientation properties of Short Fiber Reinforced Polymers within Early Design Steps. FEA Inf. Eng. J. 2013, 2, 2167–2173. [Google Scholar]
- Bauer, C. Charakterisierung und Numerische Beschreibung des Nichtlinearen Werkstoff- und Lebensdauerverhaltens eines kurzglasfaserverstärkten Polymerwerkstoffes unter Berücksichtigung der im µCT Gemessenen Lokalen Faserorientierung; IVW-Schriftenreihe; Als Manuskript gedruckt; Institut für Verbundwerkstoffe GmbH: Kaiserslautern, Germany, 2017; ISBN 978-3-944440-22-4. [Google Scholar]
- Schöpfer, J.; Becker, F.; Maier, M.; Kolling, S. Charakterisierung und Modellierung von Kurzfaserverstärkten Kunststoffen Teil 2: Simulationsmethoden mit LS-DYNA; 9th LS-DYNA Forum; Material IV-Faserverstärkte Kunststoffe: Bamberg, Germany, 2010. [Google Scholar]
- Nutini, M.; Vitali, M. Simulating Anisotropy with Ls-Dyna in Glass-Reinforced, Polypropylene-Based Components. 2010. Available online: https://www.dynamore.de/de/download/papers/forum10/papers/F-IV-01.pdf (accessed on 30 March 2022).
- Dean, A.; Grbic, N.; Rolfes, R.; Behrens, B. Macro-mechanical Modeling and Experimental Validation of Anisotropic, Pressure- and Temperature-dependent Behavior of Short Fiber Composites. Compos. Struct. 2019, 211, 630–643. [Google Scholar] [CrossRef]
- Dean, A.; Reinoso, J.; Sahraee, S.; Rolfes, R. An invariant-based anisotropic material model for short fiber-reinforced thermoplastics: Coupled thermo-plastic formulation. Compos. Part A Appl. Sci. Manuf. 2016, 90, 186–199. [Google Scholar] [CrossRef]
- De Monte, M.; Moosbrugger, E.; Quaresimin, M. Influence of temperature and thickness on the off-axis behaviour of short glass fibre reinforced polyamide 6.6—Quasi-static loading. Compos. Part Appl. Sci. Manuf. 2010, 41, 859–871. [Google Scholar] [CrossRef]
- Affdl, J.C.H.; Kardos, J.L. The Halpin-Tsai equations: A review. Polym. Eng. Sci. 1976, 16, 344–352. [Google Scholar] [CrossRef]
- Price, C.D.; Hine, P.J.; Whiteside, B.; Cunha, A.M.; Ward, I.M. Modelling the elastic and thermoelastic properties of short fibre composites with anisotropic phases. Compos. Sci. Technol. 2006, 66, 69–79. [Google Scholar] [CrossRef]
- Kalaprasad, G.; Joseph, K.; Thomas, S.; Pavithran, C. Theoretical modelling of tensile properties of short sisal fibre-reinforced low-density polyethylene composites. J. Mater. Sci. 1997, 32, 4261–4267. [Google Scholar] [CrossRef]
- Friedrich, K. Microstructural efficiency and fracture toughness of short fiber/thermoplastic matrix composites. Compos. Sci. Technol. 1985, 22, 43–74. [Google Scholar] [CrossRef]
- Facca, A.G.; Kortschot, M.T.; Yan, N. Predicting the elastic modulus of natural fibre reinforced thermoplastics. Compos. Part Appl. Sci. Manuf. 2006, 37, 1660–1671. [Google Scholar] [CrossRef]
- Islam, M.A.; Begum, K. Prediction Models for the Elastic Modulus of Fiber-reinforced Polymer Composites: An Analysis. J. Sci. Res. 2011, 3, 225–238. [Google Scholar] [CrossRef]
- Zhai, Z.; Gröschel, C.; Drummer, D. Tensile behavior of quasi-unidirectional glass fiber/polypropylene composites at room and elevated temperatures. Polym. Test. 2016, 54, 126–133. [Google Scholar] [CrossRef]
- Mori, T.; Tanaka, K. Average stress in matrix and average elastic energy of materials with misfitting inclusions. Acta Metall. 1973, 21, 571–574. [Google Scholar] [CrossRef]
- Lopez, D.; Thuillier, S.; Grohens, Y. Prediction of elastic anisotropic thermo-dependent properties of discontinuous fiber-reinforced composites. J. Compos. Mater. 2020, 54, 1913–1923. [Google Scholar] [CrossRef] [Green Version]
- Advani, S.G.; Tucker, C.L. The use of tensors to describe and predict fiber orientation in short fiber composites. J. Rheol. 1987, 31, 751–784. [Google Scholar] [CrossRef]
- Bernasconi, A.; Cosmi, F.; Dreossi, D. Local anisotropy analysis of injection moulded fibre reinforced polymer composites. Compos. Sci. Technol. 2008, 68, 2574–2581. [Google Scholar] [CrossRef] [Green Version]
- Cosmi, F.; Bernasconi, A.; Sodini, N. Phase contrast micro-tomography and morphological analysis of a short carbon fibre reinforced polyamide. Compos. Sci. Technol. 2011, 71, 23–30. [Google Scholar] [CrossRef] [Green Version]
- Esha; Hausmann, J. Development of an analytical model to predict storage modulus with four independent parameters. In Proceedings of the SAMPE Europe Conference 2021: Innovation towards Perfection, Baden, Switzerland, 29–30 September 2021; p. 8. [Google Scholar]
- Saghir, F. Mechanical characterization of particulated FRP composite pipes: A comprehensive experimental study. Polym. Test. 2021, 93, 107001. [Google Scholar] [CrossRef]
- Pielichowski, K.; Njuguna, J. Thermal Degradation of Polymeric Materials; Rapra Technology: Shawbury and Billingham, UK, 2005; ISBN 1-85957-498-X. [Google Scholar]
- Hatakeyama, T.; Quinn, F.X. Thermal Analysis: Fundamentals and Applications to Polymer Science, 2nd ed.; Wiley: Chichester, NY, USA, 1999; ISBN 978-0-471-98362-0. [Google Scholar]
- Franck, A. Viscoelasticity and Dynamic Mechanical Testing. Available online: http://www.tainstruments.com/pdf/literature/AAN004_Viscoelasticity_and_DMA.pdf (accessed on 30 March 2022).
- Dynamic Mechanical Analysis (DMA) A Beginner’s Guide. Available online: https://resources.perkinelmer.com/corporate/cmsresources/images/44-74546gde_introductiontodma.pdf (accessed on 30 March 2022).
- ISO 527-1 2012. ISO Plastic-Determination of Tensile Properties, Part 1: General Principles. 2012. Available online: https://infostore.saiglobal.com/preview/98698754403.pdf?sku=858558_SAIG_NSAI_NSAI_2042422 (accessed on 30 March 2022).
- Hollomon, J. Tensile deformation. Trans. Metall. Soc. AIME 1945, 162, 268–290. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fiber Content | Fiber Orientation | Thickness | Temperature | Humidity |
|---|---|---|---|---|
| 15%, 30%, 60% | 0°, 30°, 90° | 2 mm, 3 mm | −20 °C, RT, 80 °C | 50% RH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esha; Hausmann, J. Development of an Analytical Model to Predict Stress–Strain Curves of Short Fiber-Reinforced Polymers with Six Independent Parameters. J. Compos. Sci. 2022, 6, 140. https://doi.org/10.3390/jcs6050140
Esha, Hausmann J. Development of an Analytical Model to Predict Stress–Strain Curves of Short Fiber-Reinforced Polymers with Six Independent Parameters. Journal of Composites Science. 2022; 6(5):140. https://doi.org/10.3390/jcs6050140
Chicago/Turabian StyleEsha, and Joachim Hausmann. 2022. "Development of an Analytical Model to Predict Stress–Strain Curves of Short Fiber-Reinforced Polymers with Six Independent Parameters" Journal of Composites Science 6, no. 5: 140. https://doi.org/10.3390/jcs6050140
APA StyleEsha, & Hausmann, J. (2022). Development of an Analytical Model to Predict Stress–Strain Curves of Short Fiber-Reinforced Polymers with Six Independent Parameters. Journal of Composites Science, 6(5), 140. https://doi.org/10.3390/jcs6050140