
Static and Vibration Analyses of a Composite CFRP Robot Manipulator



Abstract
:1. Introduction
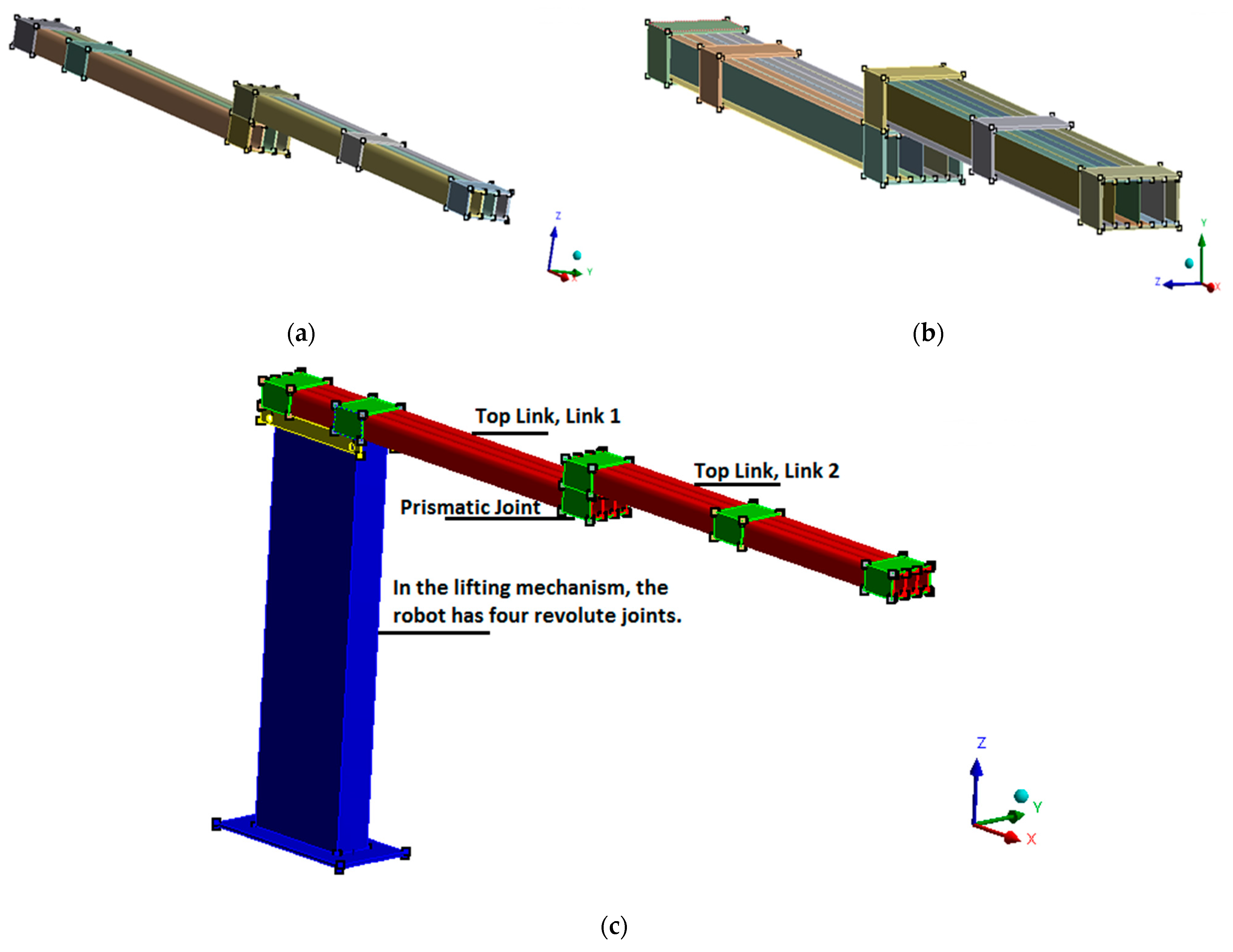
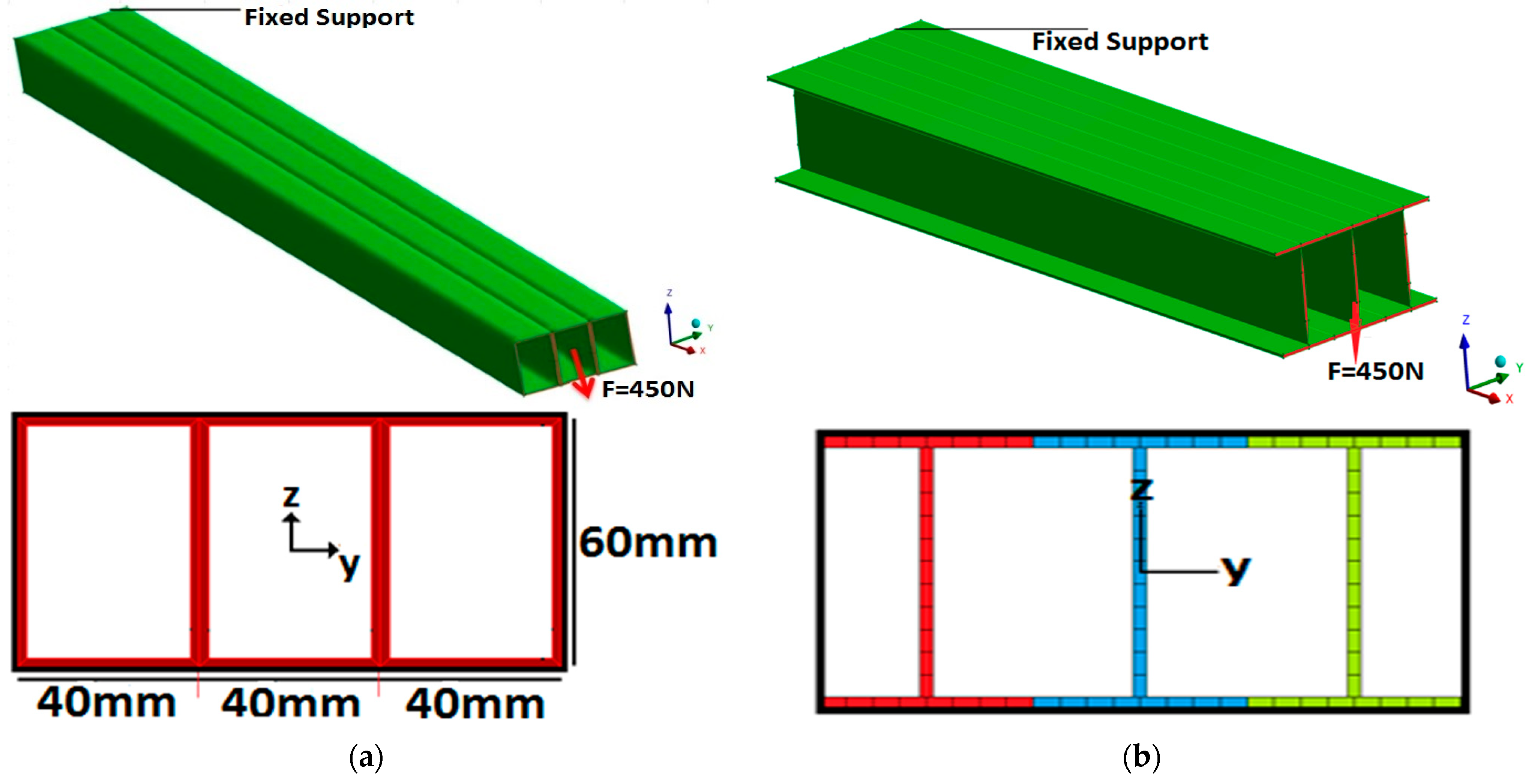
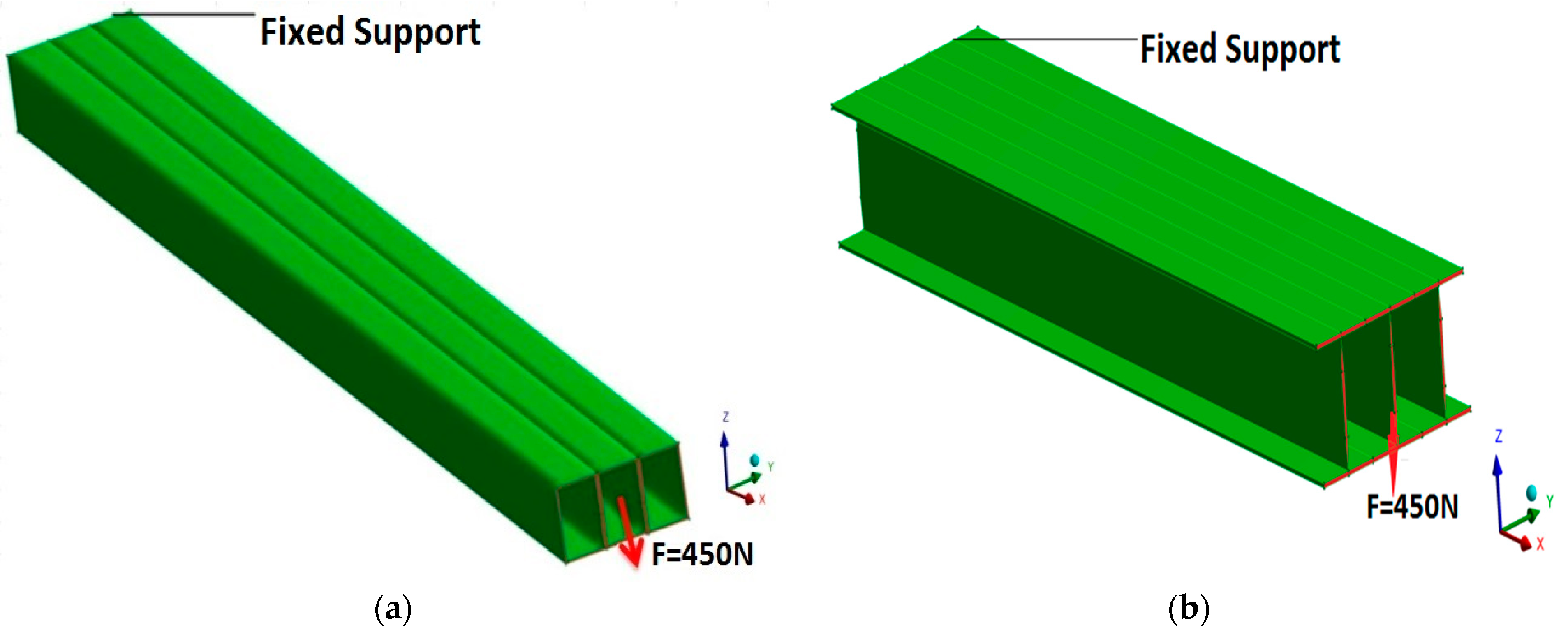
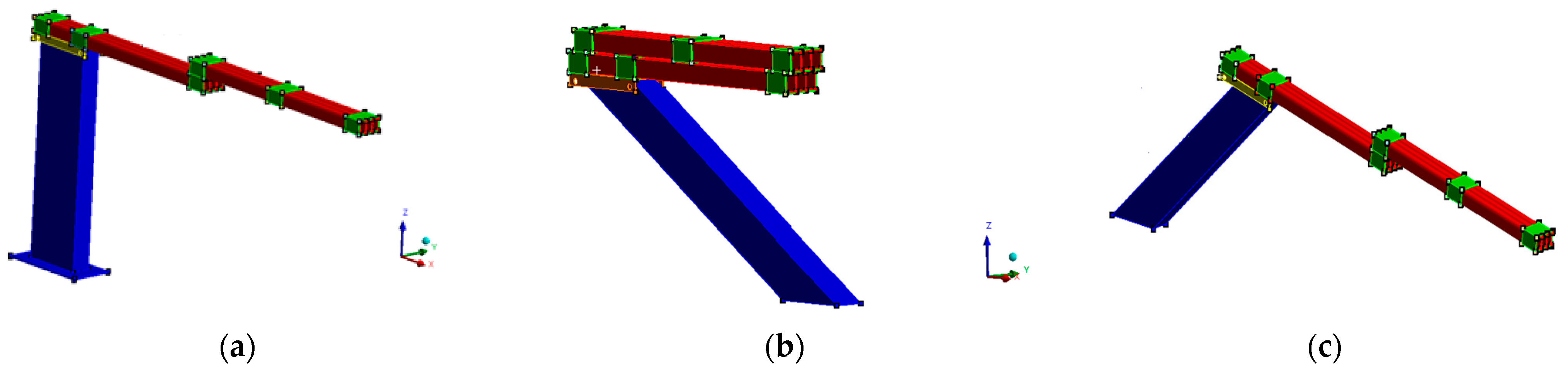
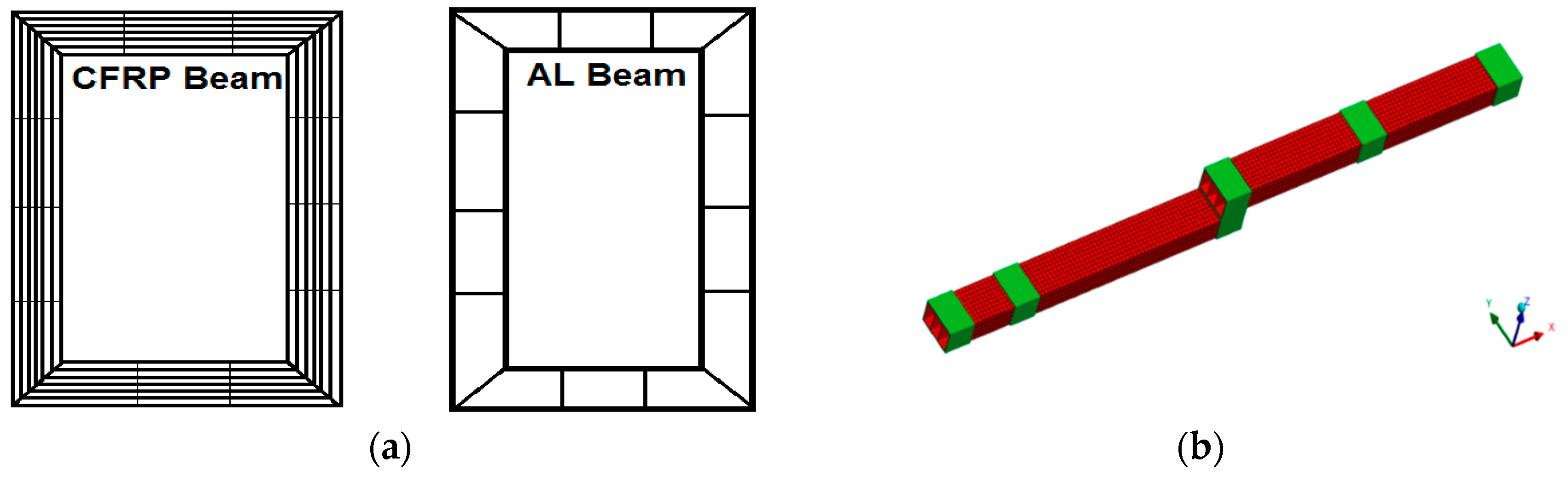
2. Robot Manipulator’s Composite Parts
3. Verifying the FE Model
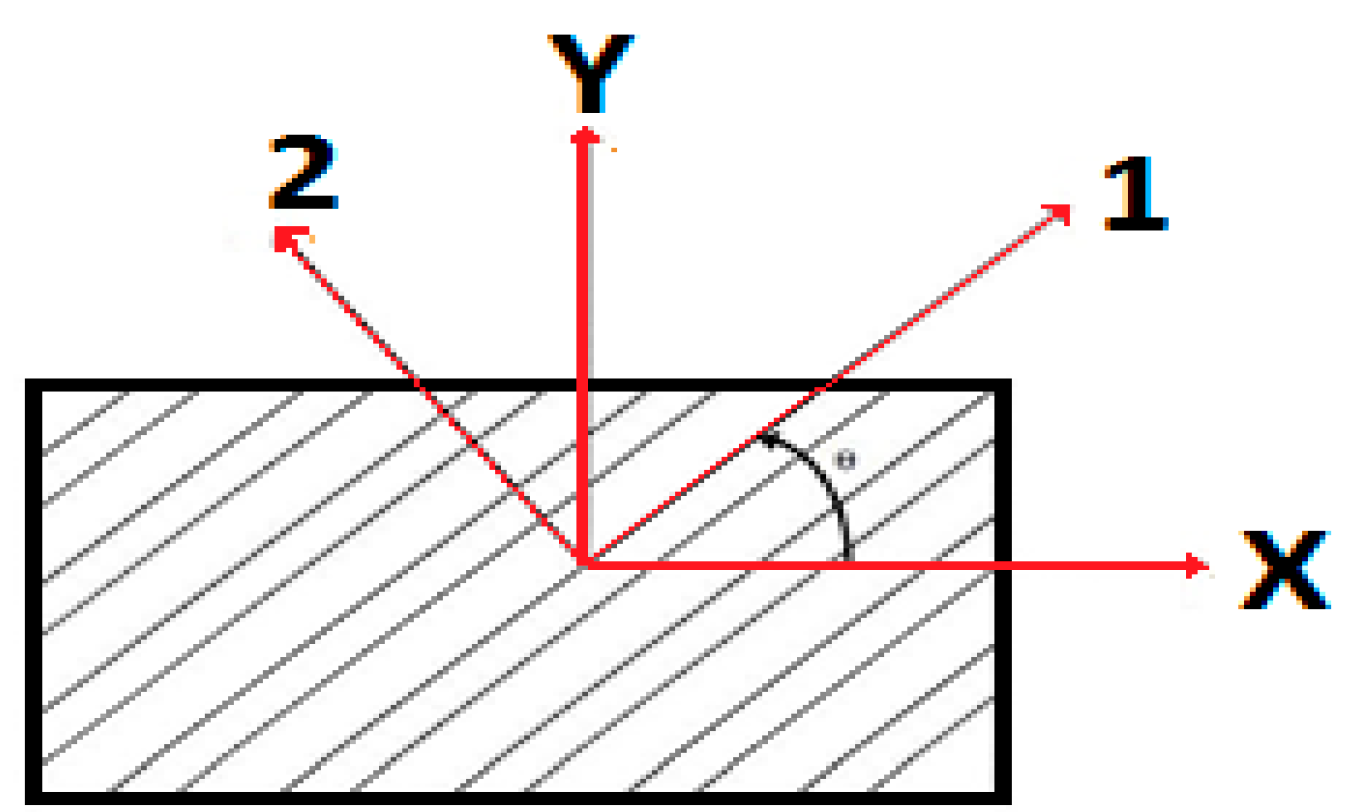
4. Effect of Layup on Mechanical Properties of Composite Parts
5. Effect of Layups on Beam Deflection
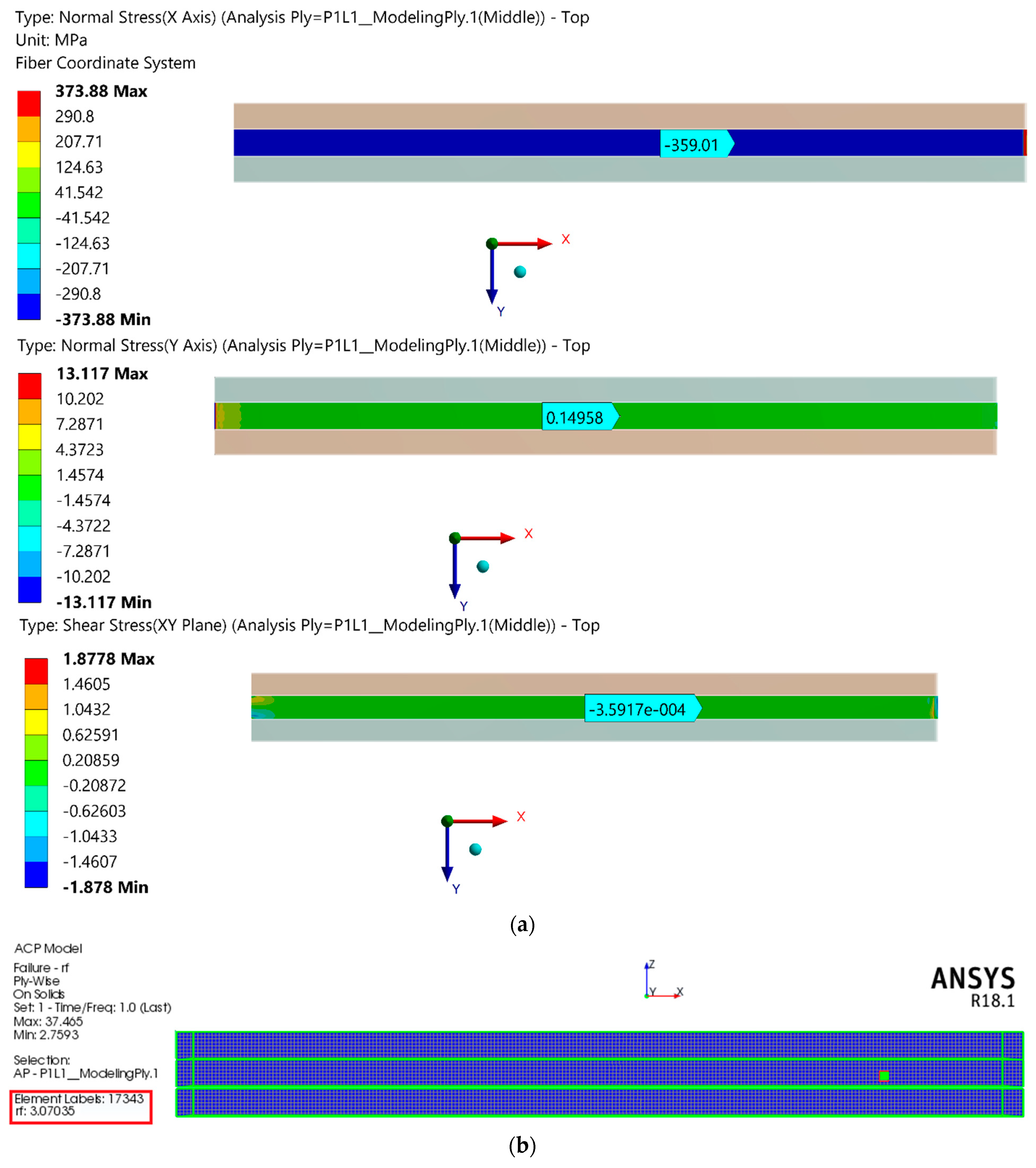
6. Failure Index
7. Effect of Layup on Composite Beam’s Natural Frequency
8. Selecting the Best Layup for Composite Parts
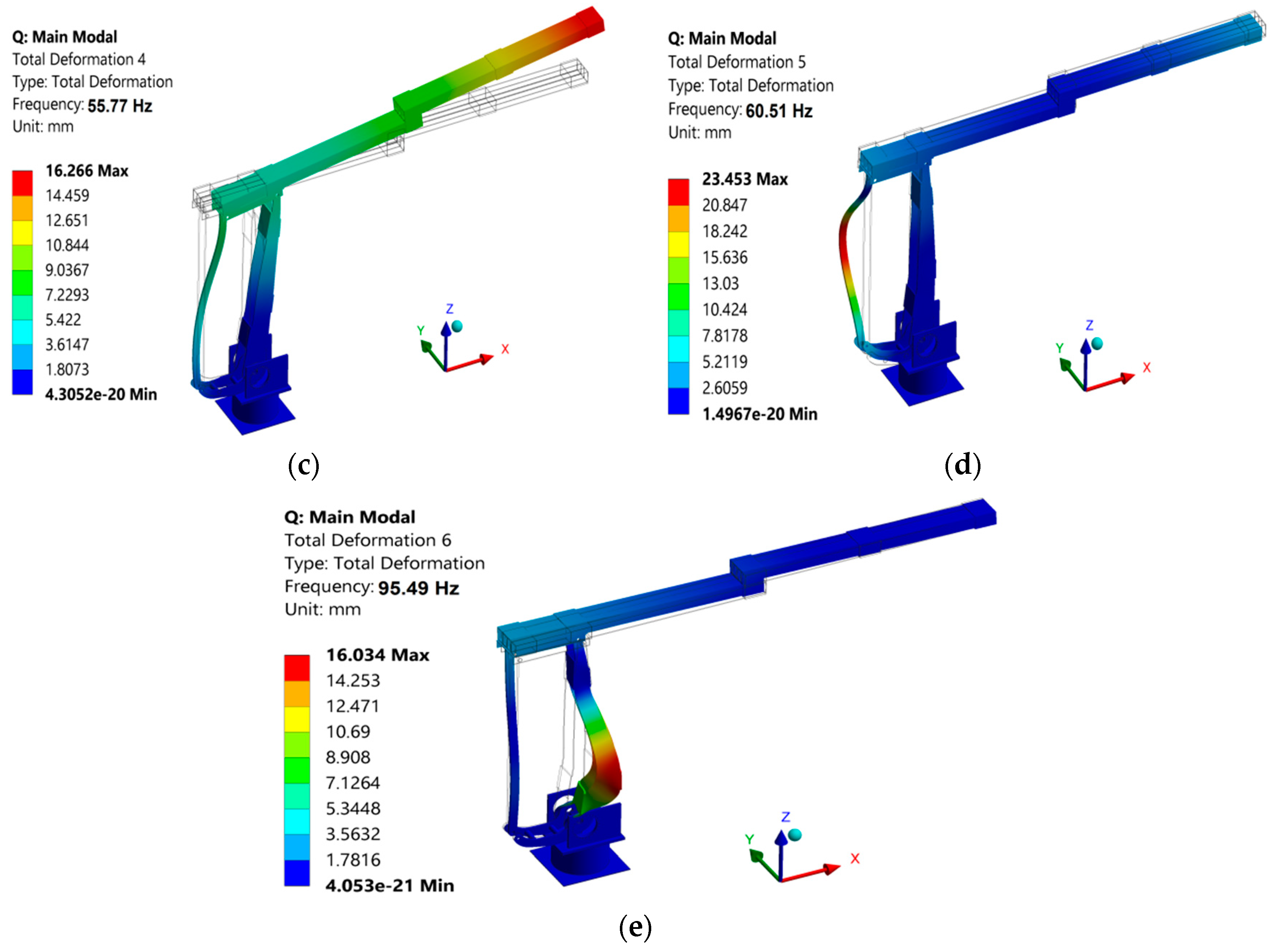
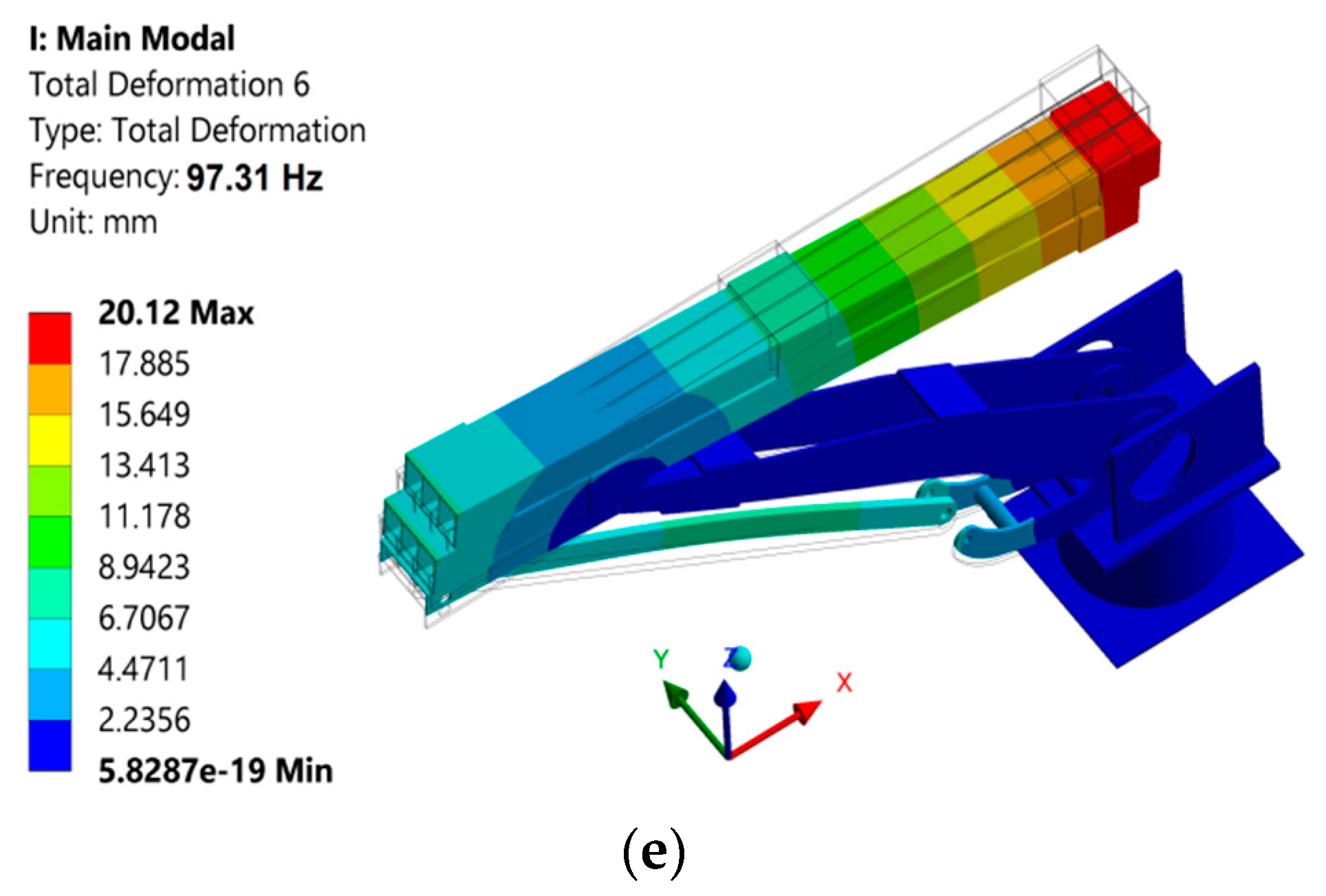
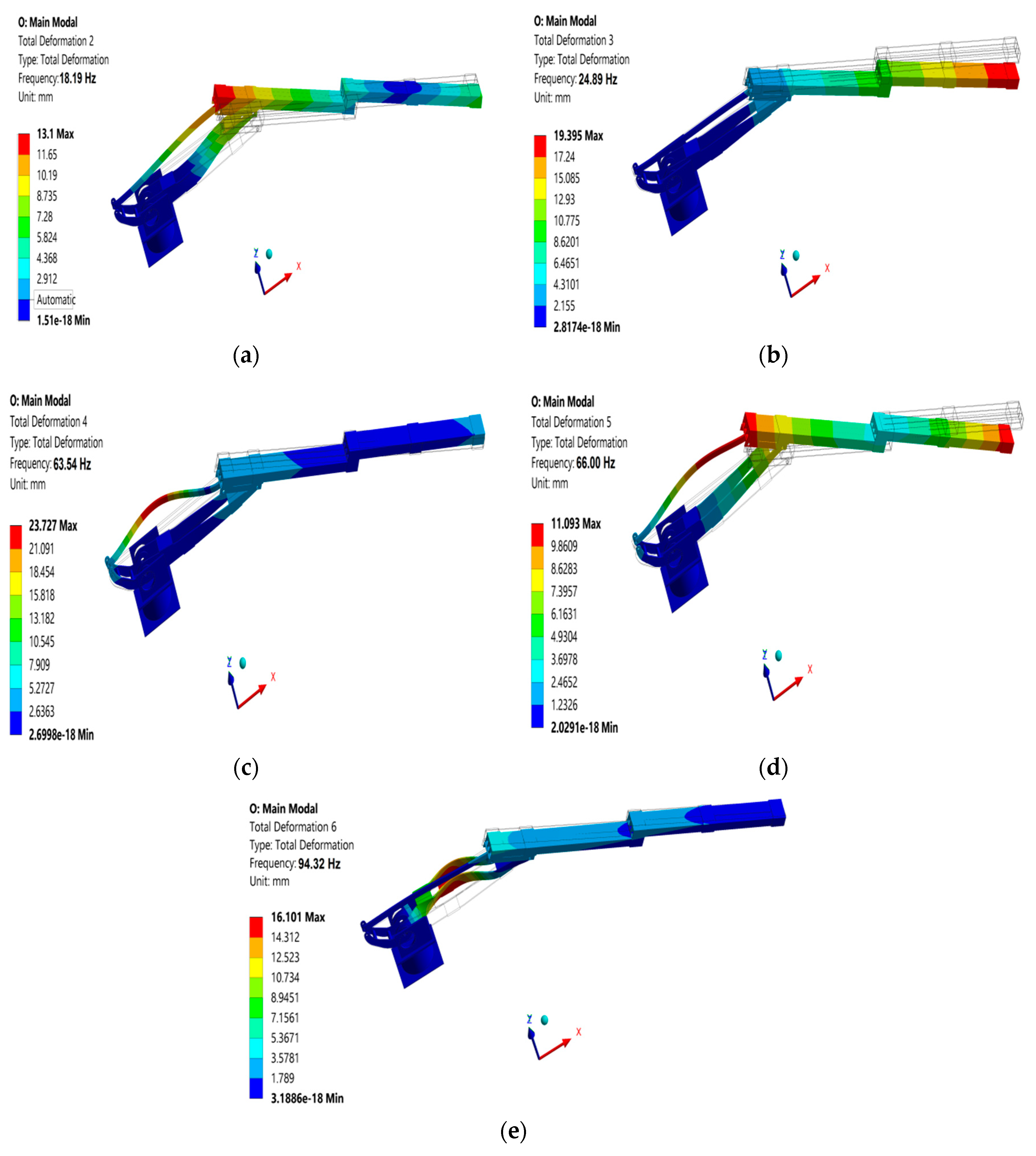
9. Modal Analysis of the Manipulator
10. Conclusions
Author Contributions
Funding
Limitation
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A. Detail of Stress Analysis and Verification for Laminated Composite Beam
Appendix A.1. Stress Analysis of Laminated Composite Beam Details
Appendix A.2. Comparison of Analytical Safety Ratios with FEA Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layup | Ply No. (Angle) | (MPa) | (MPa) | |||||
|---|---|---|---|---|---|---|---|---|
| L1 | Ply 1 (0°) | 167 | 0 | 0 | 11.3 | 10.4 | 11.3 | 10.4 |
| L2 | Ply 1 (20°) | 182 | −14.7 | −13.0 | 4.51 | 4.27 | 4.26 | 4.02 |
| L3 | Ply 1 (30°) | 190 | −23.1 | −35.0 | 2.18 | 2.06 | 1.89 | 1.80 |
| L4 | Ply 5 (45°) | 440 | 3.44 | −10.0 | 6.36 | 5.85 | 6.39 | 5.88 |
| L5 | Ply 3 (45°) | 41.8 | 3.43 | −13.7 | 4.82 | 4.46 | 4.91 | 4.54 |
| L6 | Ply 1 (45°) | 41.1 | 4.23 | −19.8 | 3.36 | 3.15 | 3.47 | 3.22 |
| L7 | Ply 5 (90°) | −12.4 | 12.4 | 0 | 3.99 | 3.68 | 4.10 | 3.79 |
| L8 | Ply 5 (90°) | −96.2 | 18.5 | 0 | 2.35 | 2.14 | 2.66 | 2.42 |
| Layup | Ply No. (Angle) | (MPa) | (MPa) | |||||
|---|---|---|---|---|---|---|---|---|
| L1 | Ply 1 (0°) | −167 | 0 | 0 | 6.57 | 6.04 | 6.57 | 6.04 |
| L2 | Ply 1 (20°) | −181 | 14.6 | 12.9 | 2.14 | 2.01 | 2.62 | 2.44 |
| L3 | Ply 1 (30°) | −190 | 23.1 | 34.9 | 1.23 | 1.16 | 1.45 | 1.38 |
| L4 | Ply 1 (0°) | −200 | 3.22 | −0.46 | 4.34 | 4.05 | 5.13 | 4.77 |
| L5 | Ply 1 (0°) | −254 | 5.83 | 0 | 3.12 | 2.94 | 3.83 | 3.58 |
| L6 | Ply 3 (0°) | −345 | 9.21 | 0.27 | 2.20 | 2.05 | 2.73 | 2.54 |
| L7 | Ply 1 (0°) | −206 | −3.04 | 0 | 6.61 | 6.02 | 5.33 | 4.93 |
| L8 | Ply 1 (0°) | −331 | 0.04 | 0 | 3.30 | 3.06 | 3.32 | 3.06 |
| Layup | Ply No. (Angle) | (MPa) | (MPa) | |||||
|---|---|---|---|---|---|---|---|---|
| L1 | Ply 1 (0°) | 202 | 0 | 0 | 9.39 | 8.89 | 9.39 | 8.89 |
| L2 | Ply 1 (20°) | 219 | −17.7 | −15.6 | 3.73 | 3.32 | 3.53 | 3.14 |
| L3 | Ply 1 (30°) | 229 | −27.8 | 42.2 | 1.80 | 1.63 | 1.56 | 1.42 |
| L4 | Ply 5 (45°) | 49.7 | 4.31 | 12.1 | 5.21 | 4.94 | 5.25 | 4.97 |
| L5 | Ply 3 (45°) | 50.7 | 4.13 | −16.6 | 3.99 | 3.75 | 4.06 | 3.83 |
| L6 | Ply 1 (45°) | 49.7 | 5.11 | 23.9 | 2.85 | 2.65 | 2.89 | 2.71 |
| L7 | Ply 5 (90°) | −15 | 14.9 | 0 | 3.30 | 3.13 | 3.39 | 3.19 |
| L8 | Ply 5 (90°) | −116 | 22.3 | 0 | 1.94 | 1.84 | 2.20 | 2.07 |
| Layup | Ply No. (Angle) | (MPa) | (MPa) | |||||
|---|---|---|---|---|---|---|---|---|
| L1 | Ply 1 (0°) | −202 | 0 | 0 | 5.43 | 5.14 | 5.43 | 5.14 |
| L2 | Ply 1 (20°) | −219 | 17.7 | 15.7 | 1.77 | 1.55 | 2.17 | 1.88 |
| L3 | Ply 1 (30°) | −229 | 27.8 | 42.2 | 1.02 | 0.91 | 1.20 | 1.06 |
| L4 | Ply 1 (0°) | −242 | 3.89 | −0.56 | 3.59 | 3.21 | 4.25 | 3.90 |
| L5 | Ply 1 (0°) | −307 | 7.04 | 0.02 | 2.59 | 2.31 | 3.17 | 2.88 |
| L6 | Ply 3 (0°) | −417 | 11.1 | 0.32 | 1.81 | 1.71 | 2.26 | 2.13 |
| L7 | Ply 1 (0°) | −248 | −3.67 | 0 | 5.48 | 5.14 | 4.41 | 4.11 |
| L8 | Ply 1 (0°) | −400 | 0.04 | 0.03 | 2.72 | 2.63 | 2.73 | 2.59 |
Appendix A.3. Shear Compliances and Stiffness Equations for Square and I-Beams
Appendix A.4. Details on Calculating the Equivalent Bending and Shear Stiffness of a Composite Beam
| 3.52 × 10−6 | 1.08 × 10−4 | 1.05 × 10−5 |
| Layup | d | bw | bf | df |
|---|---|---|---|---|
| [0/0/0/0/0]s | 58 | 56 | 40 | 38 |
Appendix B. Material Properties
| Property | Carbon Fiber-Reinforced Epoxy (CFRP) |
|---|---|
| Longitudinal modulus, E1 [GPa] | 142 |
| Transverse modulus, E2 [GPa] | 9 |
| Out-of-plane modulus, E3 [GPa] | 9 |
| In-plane shear modulus, G12 [GPa] | 4.6 |
| Out-of-plane shear modulus, G23 [GPa] | 3.08 |
| Out-of-plane shear modulus, G13 [GPa] | 4.6 |
| Major in-plane Poisson’s ratio v12 | 0.32 |
| Out-of-plane Poisson’s ratio v23 | 0.46 |
| Out-of-plane Poisson’s ratio v13 | 0.32 |
| Longitudinal tensile strength, F1t [MPa] | 1900 |
| Transverse tensile strength, F2t [MPa] | 51 |
| Out-of-plane tensile strength, F3t [MPa] | 51 |
| Longitudinal compressive strength, F1c [MPa] | 1100 |
| Transverse compressive strength, F2c [MPa] | 130 |
| Out-of-plane compressive strength, F3c [MPa] | 130 |
| In-plane shear strength, F6 [MPa] | 72 |
| Out-of-plane shear strength, F4[MPa] | 70 |
| Out-of-plane shear strength, F5 [MPa] | 72 |
| Property | Steel | Aluminum Alloy |
|---|---|---|
| E(GPa) | 200 | 71 |
| G (GPa) | 76.92 | 20.69 |
| 0.3 | 0.33 |
Appendix C. CFRP Manipulator Mode Shapes





Appendix D. Additional Details of the FEA Results
| Load (N) | Mesh Size (mm) | Strain in x-Direction | CPU Time (s) |
|---|---|---|---|
| 435 | 20 | 0.130 × 10−4 | 49.7 |
| 435 | 10 | 0.160 × 10−4 | 50.8 |
| 435 | 5.0 | 0.163 × 10−4 | 62.4 |





References
- Zenkov, E. Investigation of the stress–strain state of racks of light steel thin-walled structures by the method of digital image correlation. Mater. Today Proc. 2021, 38, 1375–1378. [Google Scholar] [CrossRef]
- Hou, Y.; Li, Z.; Ni, S.; Gong, J. Structural responses of a modular thin-walled steel trestle structure. J. Constr. Steel Res. 2019, 158, 502–521. [Google Scholar] [CrossRef]
- Kasiviswanathan, M.; Upadhyay, A. Global buckling behavior of blade stiffened compression flange of FRP box-beams. Structures 2021, 32, 1081–1091. [Google Scholar] [CrossRef]
- Ascione, L.; Berardi, V.P.; Giordano, A.; Spadea, S. Local buckling behavior of FRP thin-walled beams: A mechanical model. Compos. Struct. 2013, 98, 111–120. [Google Scholar] [CrossRef]
- An, H.; Singh, J.; Pasini, D. Structural efficiency metrics for integrated selection of layup, material, and cross-section shape in laminated composite structures. Compos. Struct. 2017, 170, 53–68. [Google Scholar] [CrossRef] [Green Version]
- Keller, A.; Geissberger, R.; Studer, J.; Leone, F.; Stefaniak, D.; Pascoe, J.; Dransfeld, C.; Masania, K. Experimental and numerical investigation of ply size effects of steel foil reinforced composites. Mater. Des. 2021, 198, 109302. [Google Scholar] [CrossRef]
- Huang, Z.; Li, Y.; Zhang, X.; Chen, W.; Fang, D. A comparative study on the energy absorption mechanism of aluminum/CFRP hybrid beams under quasi-static and dynamic bending. Thin-Walled Struct. 2021, 163, 107772. [Google Scholar] [CrossRef]
- Qin, H.; Guo, Y.; Liu, Z.; Liu, Y.; Zhong, H. Shape optimization of automotive body frame using an improved genetic algorithm optimizer. Adv. Eng. Softw. 2018, 121, 235–249. [Google Scholar] [CrossRef]
- Cui, X.; Zhang, H.; Wang, S.; Zhang, L.; Ko, J. Design of lightweight multi-material automotive bodies using new material performance indices of thin-walled beams for the material selection with crashworthiness consideration. Mater. Des. 2011, 32, 815–821. [Google Scholar] [CrossRef]
- Bao, Y.; Wang, B.; He, Z.; Kang, R.; Guo, J. Recent progress in flexible supporting technology for aerospace thin-walled parts: A review. Chin. J. Aeronaut. 2022, 35, 10–26. [Google Scholar] [CrossRef]
- Moazed, R.; Khozeimeh, M.A.; Fotouhi, R. Simplified Approach for Parameter Selection and Analysis of Carbon and Glass Fiber Reinforced Composite Beams. J. Compos. Sci. 2021, 5, 220. [Google Scholar] [CrossRef]
- Lin, Y.; Bai, H.; Lin, J.; Wang, M.; Lu, H.; Min, J. A lightweight method of thin-walled beams based on cross-sectional characteristic. Procedia Manuf. 2018, 15, 852–860. [Google Scholar] [CrossRef]
- Chen, Z.; Li, G.-Q.; Bradford, M.A.; Wang, Y.-B.; Zhang, C.; Yang, G. Local buckling and hysteretic behavior of thin-walled Q690 high-strength steel H-section beam-columns. Eng. Struct. 2022, 252, 113729. [Google Scholar] [CrossRef]
- Kollár, L.P.; Springer, G. Mechanics of Composite Structures; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Xiao, Y.; Wen, X.; Liang, D. Failure modes and energy absorption mechanism of CFRP Thin-walled square beams filled with aluminum honeycomb under dynamic impact. Compos. Struct. 2021, 271, 114159. [Google Scholar] [CrossRef]
- Samal, P.K.; Pruthvi, I.; Suresh, B. Effect of fiber orientation on vibration response of glass epoxy composite beam. Mater. Today Proc. 2021, 43, 1519–1525. [Google Scholar] [CrossRef]
- Ding, G.; Zhang, Y.; Zhu, Y. Experimental and numerical investigation of the flexural behavior of CFRP box girders. Adv. Compos. Lett. 2019, 28, 2633366X19891171. [Google Scholar] [CrossRef]
- Daniel, I.M.; Ishai, O. Engineering Mechanics of Composite Materials; Oxford University Press: New York, NY, USA, 1994. [Google Scholar]
- Gliszczyński, A.; Kubiak, T. Load-carrying capacity of thin-walled composite beams subjected to pure bending. Thin-Walled Struct. 2017, 115, 76–85. [Google Scholar] [CrossRef]
- Debski, H.; Kubiak, T.; Teter, A. Experimental investigation of channel-section composite profiles’ behavior with various sequences of plies subjected to static compression. Thin-Walled Struct. 2013, 71, 147–154. [Google Scholar] [CrossRef]
- Zhang, Q.; Fotouhi, R.; Cote, J.; Pour, M.K. Lightweight Long-Reach 5-DOF Robot Arm for Farm Application. In Proceedings of the ASME 2019 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019. [Google Scholar] [CrossRef]
- Wyatt, H.; Wu, A.; Thomas, R.; Yang, Y. Life Cycle Analysis of Double-Arm Type Robotic Tools for LCD Panel Handling. Machines 2017, 5, 8. [Google Scholar] [CrossRef] [Green Version]
- Hagenah, H.; Böhm, W.; Breitsprecher, T.; Merklein, M.; Wartzack, S. Construction and manufacture of a lightweight robot arm, 8th CIRP Conference on Intelligent Computation in Manufacturing Engineering. Procedia CIRP 2013, 12, 211–216. [Google Scholar] [CrossRef]
- Yin, H.; Liu, J.; Yang, F. Hybrid Structure Design of Lightweight Robotic Arms Based on Carbon Fiber Reinforced Plastic and Aluminum Alloy. IEEE Access 2019, 7, 64932–64945. [Google Scholar] [CrossRef]
- Lee, C.S.; Lee, D.G.; Oh, J.H.; Kim, H.S. Composite wrist blocks for double arm type robots for handling large LCD glass panels. Compos. Struct. 2002, 57, 345–355. [Google Scholar] [CrossRef]
- Zeng, W.; Yan, J.; Hong, Y.; Cheng, S.S. Numerical analysis of large deflection of the cantilever beam subjected to a force pointing at a fixed point. Appl. Math. Model. 2021, 92, 719–730. [Google Scholar] [CrossRef]
- Yang, M.; Hu, Y.; Zhang, J.; Ding, G.; Song, C. Analytical model for flexural damping responses of CFRP cantilever beams in the low-frequency vibration. J. Low Freq. Noise Vib. Act. Control 2018, 37, 669–681. [Google Scholar] [CrossRef]
- Kollár, L.P. Flexural–torsional vibration of open section composite beams with shear deformation. Int. J. Solids Struct. 2001, 38, 7543–7558. [Google Scholar] [CrossRef]
- Ansys® Academic Research Mechanical, Release 18.1, Help System, Composite Materials Analysis User Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2017.











| Load (N) | Experimental Strain (10−6) (Specimen D) [17] | FEA Strain (10−6) | Difference (%) |
|---|---|---|---|
| 435 | 15 | 16 | 6.25 |
| 822 | 44 | 46 | 4.35 |
| 1225 | 74 | 75 | 1.33 |
| 2430 | 176 | 180 | 2.22 |
| 2825 | 181 | 188 | 3.72 |
| 3226 | 220 | 229 | 3.93 |
| 3625 | 248 | 235 | −5.53 |
| 4024 | 269 | 285 | 5.61 |
| Layup | ||||
|---|---|---|---|---|
| 142.0 | 4.60 | 27,427.58 | 23,271.33 | |
| 90.12 | 17.43 | 17,408.40 | 14,770.42 | |
| 46.17 | 27.90 | 8919.26 | 7567.68 | |
| L4 | 117.7 | 10.84 | 22,740.67 | 19,294.84 |
| 92.71 | 17.37 | 17,909.04 | 15,195.38 | |
| L6 | 67.36 | 23.42 | 13,010.45 | 11,038.71 |
| 116.0 | 4.60 | 22,391.39 | 18,998.51 | |
| 71.60 | 17.37 | 13,845.24 | 11,747.56 | |
| AA | 71.00 | 20.69 | 13,713.13 | 11,635.69 |
| Layup | “SSS” Beam | “III” Beam | ||||
|---|---|---|---|---|---|---|
| Difference% | Difference% | |||||
| L1 | 3.13 | 3.15 | 0.63 | 3.66 | 3.71 | 1.36 |
| L2 | 4.93 | 4.96 | 0.60 | 5.81 | 5.84 | 0.51 |
| L3 | 9.72 | 9.68 | 0.41 | 11.5 | 11.4 | 0.86 |
| L4 | 3.91 | 3.79 | 3.06 | 4.59 | 4.47 | 2.61 |
| L5 | 4.89 | 4.82 | 1.43 | 5.75 | 5.68 | 1.21 |
| L6 | 6.67 | 6.64 | 0.44 | 7.85 | 7.82 | 0.38 |
| L7 | 4.08 | 3.85 | 5.63 | 4.81 | 4.54 | 5.61 |
| L8 | 6.31 | 6.26 | 0.79 | 7.40 | 7.37 | 0.40 |
| AA | 6.34 | 6.30 | 0.63 | 7.33 | 7.42 | 1.22 |
| Layup | Ply No. (Angle) | “SSS” (Tension) | “III” (Tension) | ||
|---|---|---|---|---|---|
| L1 | Ply 1 (0°) | 11.3 | 11.3 | 9.39 | 9.39 |
| L2 | Ply 1 (20°) | 4.51 | 4.26 | 3.73 | 3.53 |
| L3 | Ply 1 (30°) | 2.18 | 1.89 | 1.80 | 1.56 |
| L4 | Ply 5 (45°) | 6.36 | 6.39 | 5.21 | 5.25 |
| L5 | Ply 3 (45°) | 4.82 | 4.91 | 3.99 | 4.06 |
| L6 | Ply 1 (45°) | 3.36 | 3.47 | 2.85 | 2.89 |
| L7 | Ply 5 (90°) | 3.99 | 4.10 | 3.30 | 3.39 |
| L8 | Ply 5 (90°) | 2.35 | 2.66 | 1.94 | 2.20 |
| AA | 1.55 | 1.36 | |||
| Layup | Ply No. (Angle) | “SSS” | “III” | ||
|---|---|---|---|---|---|
| L1 | Ply 1 (0°) | 6.57 | 6.57 | 5.43 | 5.43 |
| L2 | Ply 1 (20°) | 2.14 | 2.62 | 1.77 | 2.17 |
| L3 | Ply 1 (30°) | 1.23 | 1.45 | 1.02 | 1.20 |
| L4 | Ply 1 (0°) | 4.34 | 5.13 | 3.59 | 4.25 |
| L5 | Ply 1 (0°) | 3.12 | 3.83 | 2.59 | 3.17 |
| L6 | Ply 3 (0°) | 2.20 | 2.73 | 1.81 | 2.26 |
| L7 | Ply 1 (0°) | 6.61 | 5.33 | 5.48 | 4.41 |
| L8 | Ply 1 (0°) | 3.30 | 3.32 | 2.72 | 2.73 |
| AA | 1.55 | 1.36 | |||
| Layup | “SSS” Beam | “III” Beam | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Difference (%) | Difference (%) | |||||||||
| L1 | 82,282.5 | 82.1 | 78.4 | 78.6 | 0.25 | 69,813.9 | 89.9 | 83.4 | 83.7 | 0.36 |
| L2 | 52,225.2 | 65.4 | 64.9 | 65.9 | 1.52 | 44,311.2 | 71.6 | 70.7 | 71.3 | 0.84 |
| L3 | 26,757.6 | 46.8 | 46.7 | 47.9 | 2.51 | 22,703.0 | 51.3 | 51.0 | 51.6 | 1.16 |
| L4 | 68,221.8 | 74.8 | 73.5 | 73.6 | 0.14 | 57,884.4 | 81.9 | 79.6 | 79.0 | 0.76 |
| L5 | 53,727.1 | 66.4 | 65.8 | 66.0 | 0.30 | 45,586.1 | 72.6 | 71.6 | 71.7 | 0.14 |
| L6 | 39,031.4 | 56.6 | 56.3 | 56.6 | 0.53 | 33,116.1 | 61.9 | 61.4 | 61.5 | 0.16 |
| L7 | 67,173.9 | 74.2 | 71.4 | 71.5 | 0.14 | 56,995.5 | 81.2 | 76.3 | 76.5 | 0.26 |
| L8 | 41,535.7 | 58.4 | 58.0 | 58.0 | 0.00 | 35,242.6 | 63.9 | 63.2 | 63.1 | 0.15 |
| AA | 41,139.3 | 44.1 | 44.1 | 44.1 | 0.00 | 34,907.1 | 48.3 | 48.1 | 48.1 | 0.00 |
| Layups | ||||
|---|---|---|---|---|
| 82,282 | 3.15 | 6.57 | 78.4 | |
| 68,221 | 3.79 | 4.34 | 73.5 | |
| 67,173 | 3.85 | 6.61 | 71.4 |
| Mode | CFRP Robot 1st Config. | AA Robot 1st Config. | 1st Config Difference (%) | CFRP Robot 2nd Config. | AA Robot 2nd Config. | 2nd Config Difference (%) | CFRP Robot 3rd Config. | AA Robot 3rd Config. | 3rd Config Difference (%) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 5.33 | 4.46 | 19.5 | 14.6 | 12.4 | 17.7 | 10.3 | 8.63 | 19.3 |
| 2 | 17.9 | 16.9 | 5.92 | 20.5 | 19.2 | 6.77 | 18.2 | 17.1 | 6.43 |
| 3 | 35.2 | 30.3 | 16.1 | 45.0 | 40.6 | 10.8 | 24.8 | 20.7 | 19.8 |
| 4 | 55.7 | 48.7 | 14.3 | 64.6 | 64.1 | 0.78 | 63.5 | 61.3 | 3.59 |
| 5 | 60.5 | 60.1 | 0.67 | 95.1 | 94.1 | 1.06 | 66.1 | 63.3 | 4.42 |
| 6 | 95.5 | 95.1 | 0.42 | 97.3 | 94.6 | 2.85 | 94.3 | 93.8 | 0.53 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khozeimeh, M.A.; Fotouhi, R.; Moazed, R. Static and Vibration Analyses of a Composite CFRP Robot Manipulator. J. Compos. Sci. 2022, 6, 196. https://doi.org/10.3390/jcs6070196
Khozeimeh MA, Fotouhi R, Moazed R. Static and Vibration Analyses of a Composite CFRP Robot Manipulator. Journal of Composites Science. 2022; 6(7):196. https://doi.org/10.3390/jcs6070196
Chicago/Turabian StyleKhozeimeh, Mohammad Amir, Reza Fotouhi, and Reza Moazed. 2022. "Static and Vibration Analyses of a Composite CFRP Robot Manipulator" Journal of Composites Science 6, no. 7: 196. https://doi.org/10.3390/jcs6070196
APA StyleKhozeimeh, M. A., Fotouhi, R., & Moazed, R. (2022). Static and Vibration Analyses of a Composite CFRP Robot Manipulator. Journal of Composites Science, 6(7), 196. https://doi.org/10.3390/jcs6070196