
The Effect of Ice Floe on the Strength, Stability, and Fatigue of Hybrid Flexible Risers in the Arctic Sea


Abstract
:1. Introduction
1.1. Ice Impact Protection Methods for Flexible Risers
1.2. Numerical Models for Hybrid Risers

2. Analysis Methodology
2.1. Global Analysis
2.1.1. Static Analysis
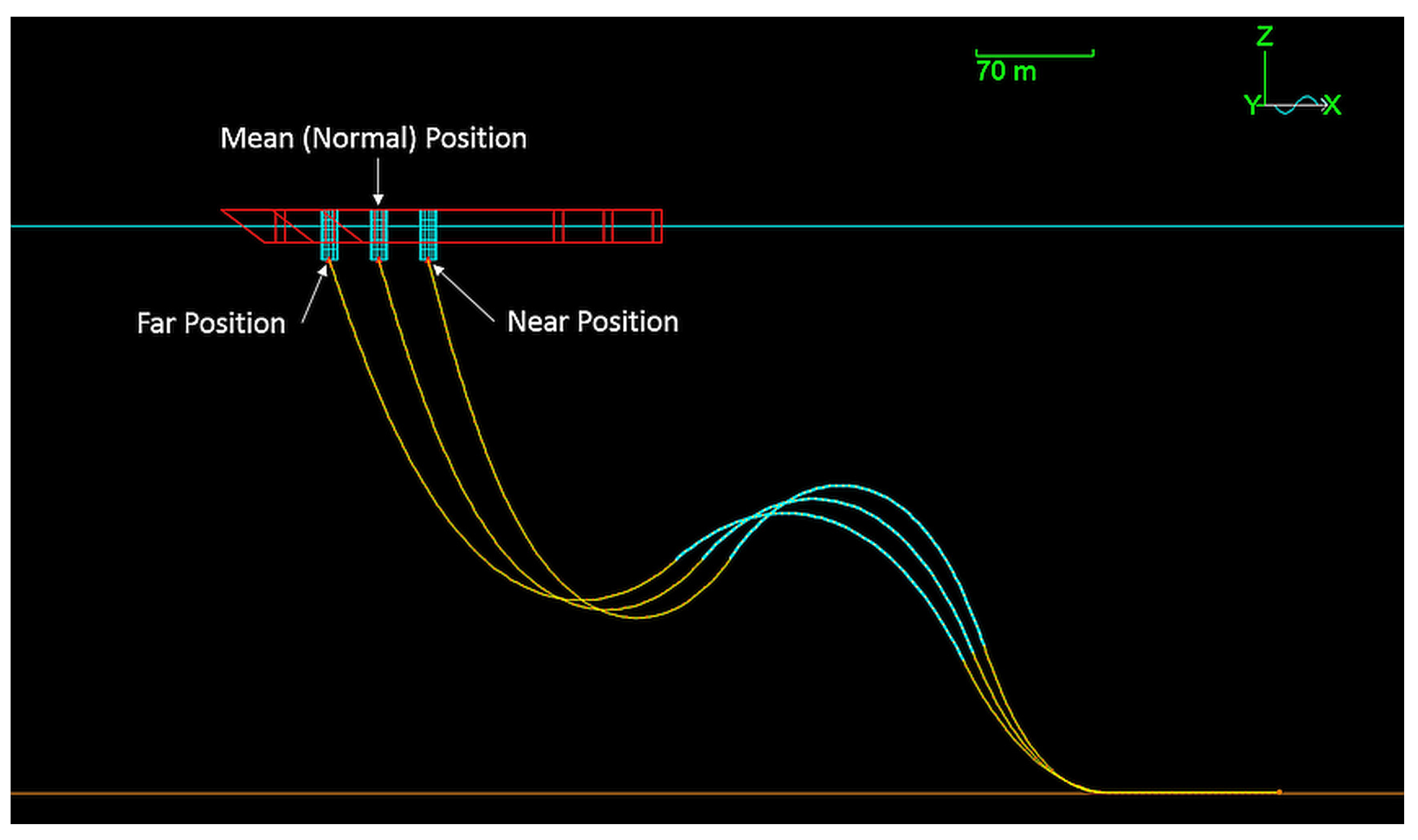
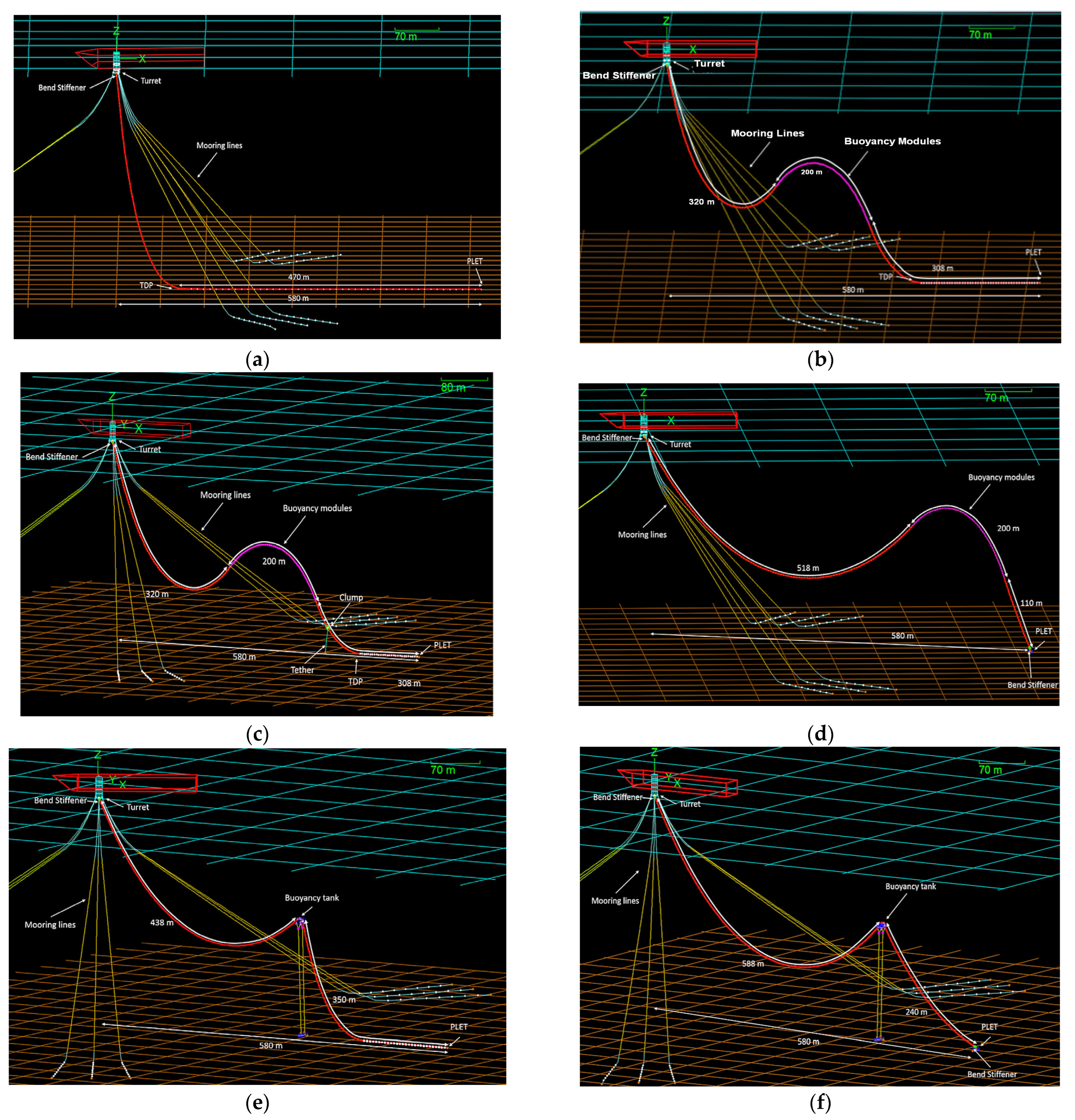
2.1.2. Load Cases for Riser Configurations
2.1.3. Dynamic Analysis
2.1.4. Load Cases with Floating Ice Configurations
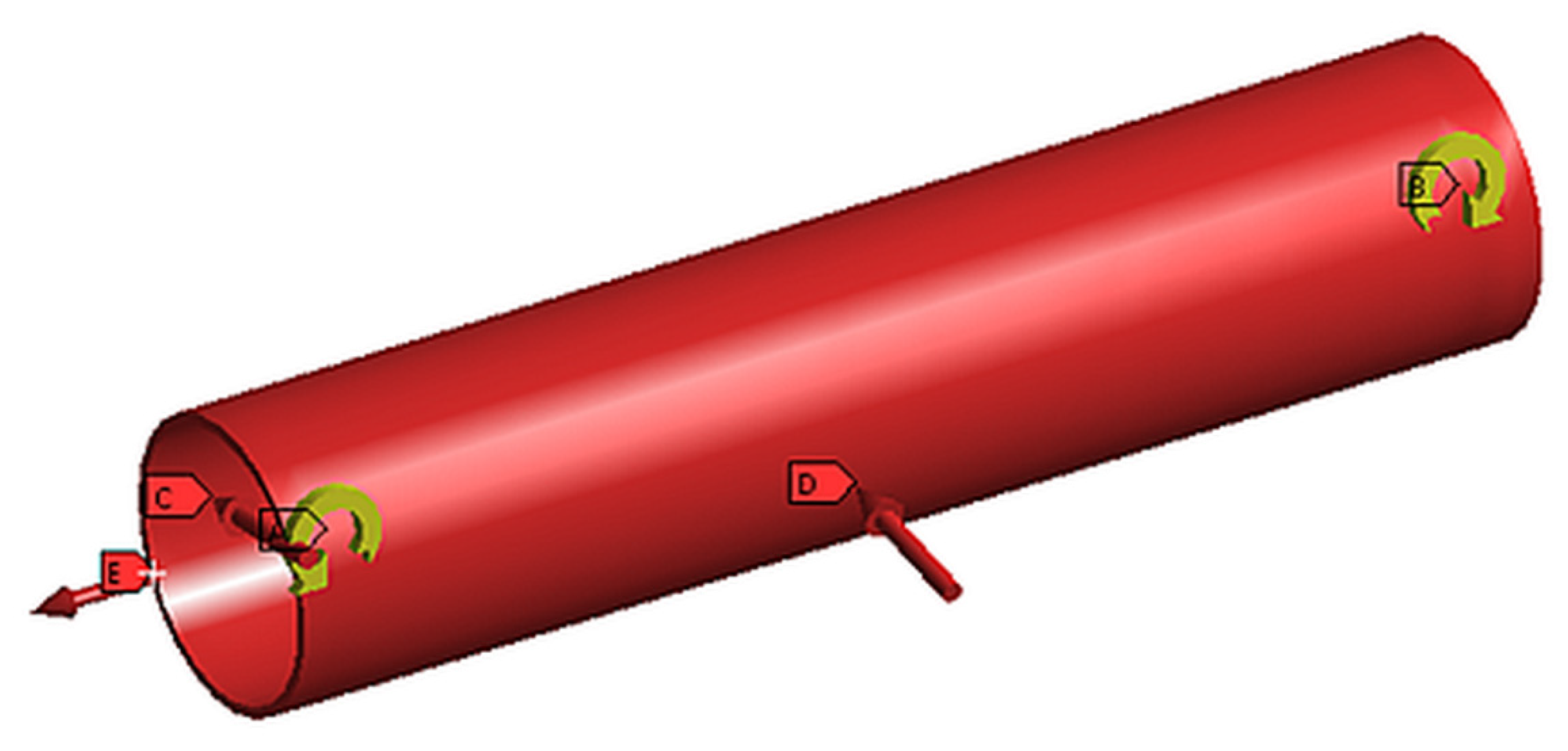
2.2. Local Analysis
2.2.1. Assumptions
- ○
- All analyses consider a 1 m (39.4 in) length pipe model in the local model.
- ○
- Material has anisotropic (orthotropic) material properties applied as each ply properties calculated from the rule of mixture equation (60% carbon fibre and 40% PA6).
- ○
- Temperature effects on materials are not considered.
- ○
- Remote displacement is used, allowing for deformation at the constraints.
- ○
- Equal bending moment was applied on both sides of the pipe, resulting in symmetric loading.
2.2.2. Loading
- ○
- Maximum bending radius applied to 1 m section—taken from global analysis. The radius was measured from the centre of the flexible pipe and extrapolated the radius to the CFRP pressure armour. Subsequently, the equivalent moment was applied to achieve the radius of the CFRP pressure armour, as calculated using extrapolation. The sliding boundary conditions were set at one end of the CFRP pipe, while the moment, axial loads, and torsional loads were applied at the other end with degrees of freedom in the x and z directions.
- ○
- Design pressure was applied to the internal surface (34.47 MPa)
- ○
- External Pressure was applied to the depth where the MBR occurred, taken from the global analysis. The external pressure value is equivalent to the column of the water at the depth taken from the pressure force absorbed by the displacement of layers above until equilibrium is found with internal pressure.
3. Results and Discussion
3.1. Static Analysis Outcomes
- ○
- The minimum bending radius (MBR) did not exceed the limit for a given cross section, but the composite layer reached low values for lazy wave, steep wave, and steep S global configurations.
- ○
- Different operation modes with a pipe filled with seawater and an empty pipe generate high differences in top tension and MBR values.
- ○
- The catenary configuration has good results for MBR but it has minimum tension at TDP that can generate compression force in dynamic mode and early fatigue for the riser.
- ○
- Lazy wave configuration has lower top tension due to the effect of distributed buoyancy but it has very low MBR and the highest bending moment at hang off point of the riser
- ○
- The plait wave configuration has high MBR and low effective tension at the vessel-riser interface and low effective tension at PLET. The bending moment at the vessel-riser interface is relatively high but it is more than tree time less than the maximum bending moment allowable for this riser. The effective tension is lower than for lazy S configuration, but due to the presence of the tether, the oscillation of the pipe due to the vessel heave is limited.
- ○
- Steep wave configuration has high effective tension at PLET and very low MBR, as well as high bending moment at vessel-riser interface.
- ○
- The lazy S configuration has relatively low MBR but the highest effective tension at vessel-riser interface due to concentrated buoyancy at the mid-water arch.
- ○
- The steep S configuration has low MBR, high bending moment, and high effective tension at the riser hang off point and PLET
3.2. Dynamic Analysis Results
Summary of Dynamic Analysis
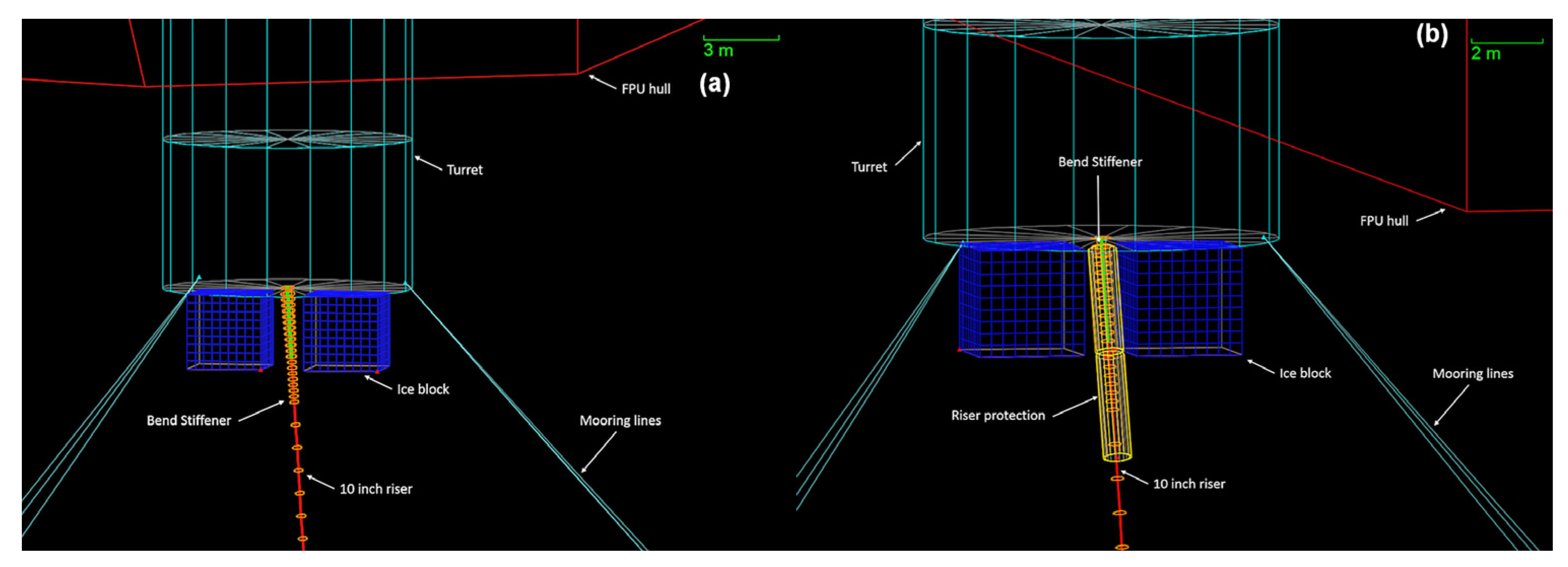
3.3. Effect of Floating Ice on Dynamic Performance of Risers
3.4. Effect of Floating Ice on Dynamic Performance of Armour Protected Risers
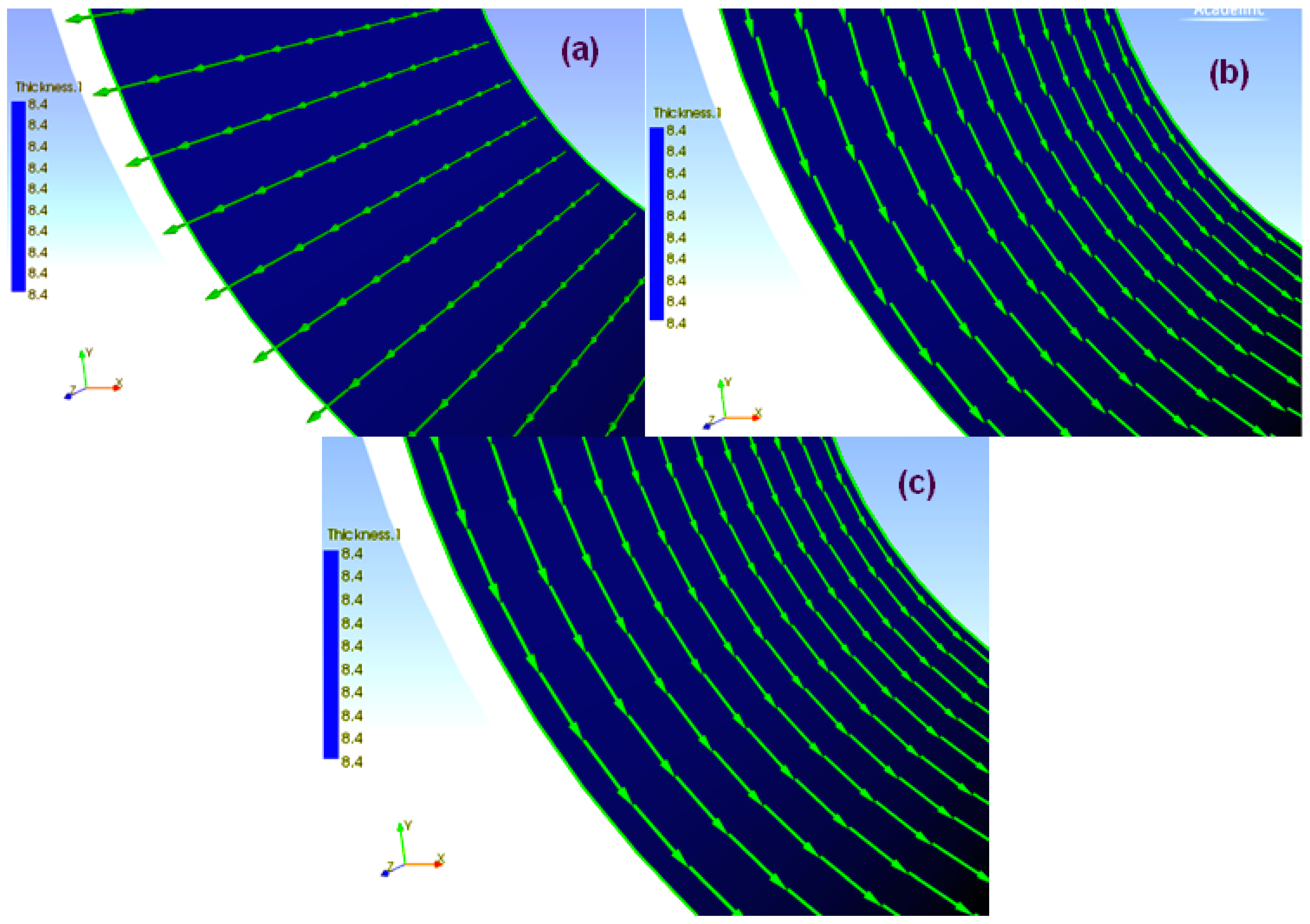
3.5. Local Model Results
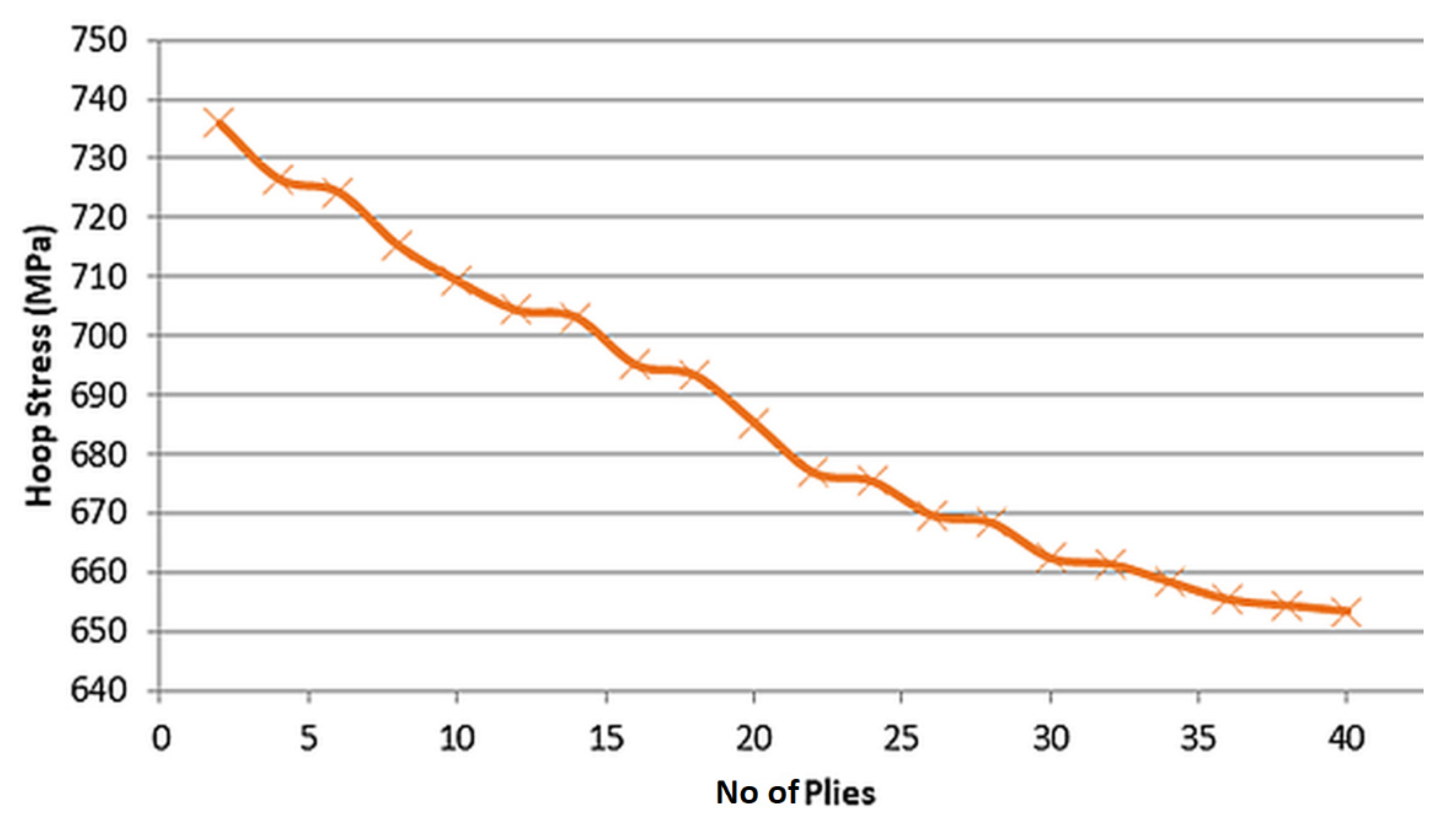
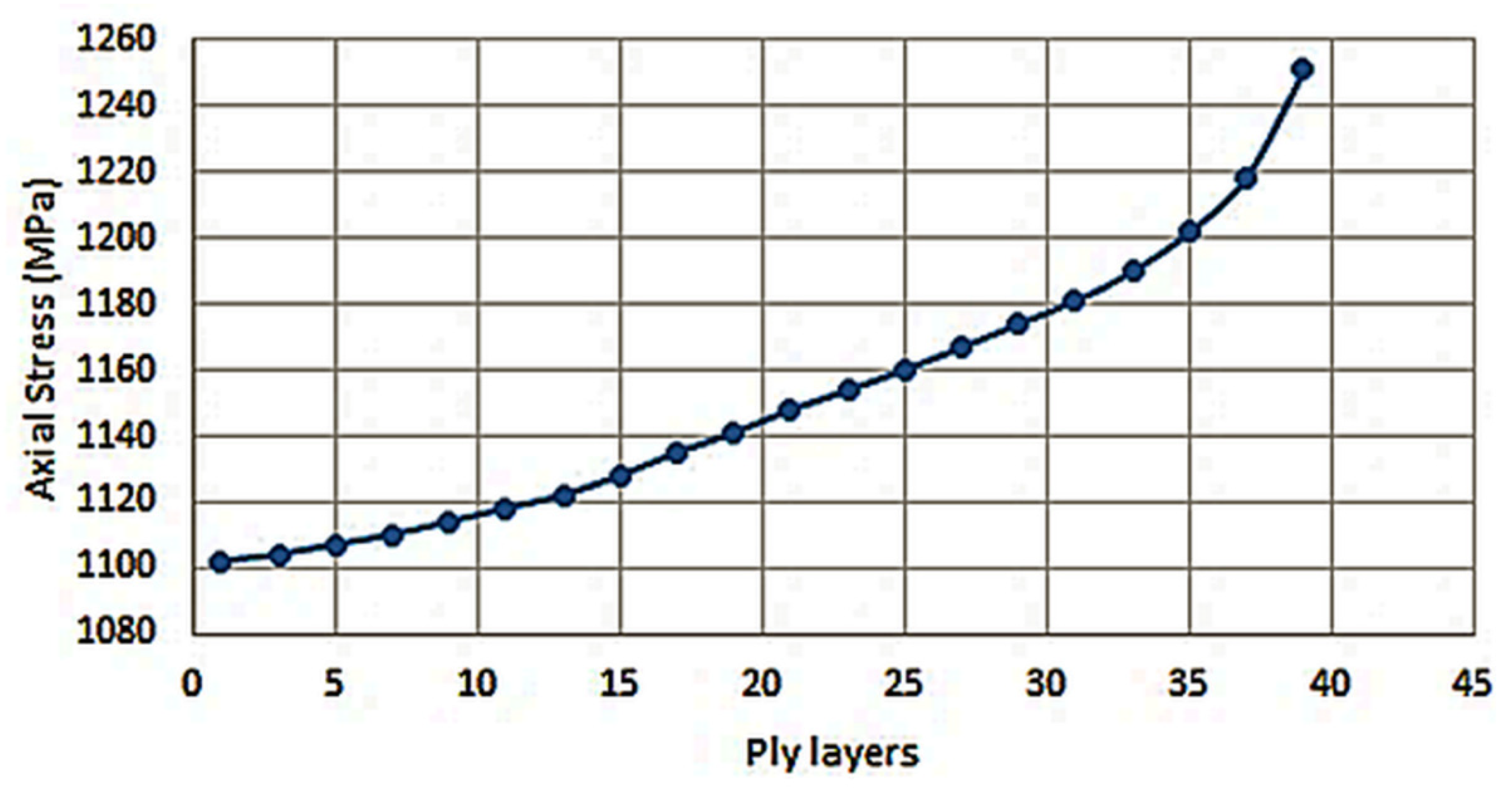
3.5.1. Pressure Load—Burst
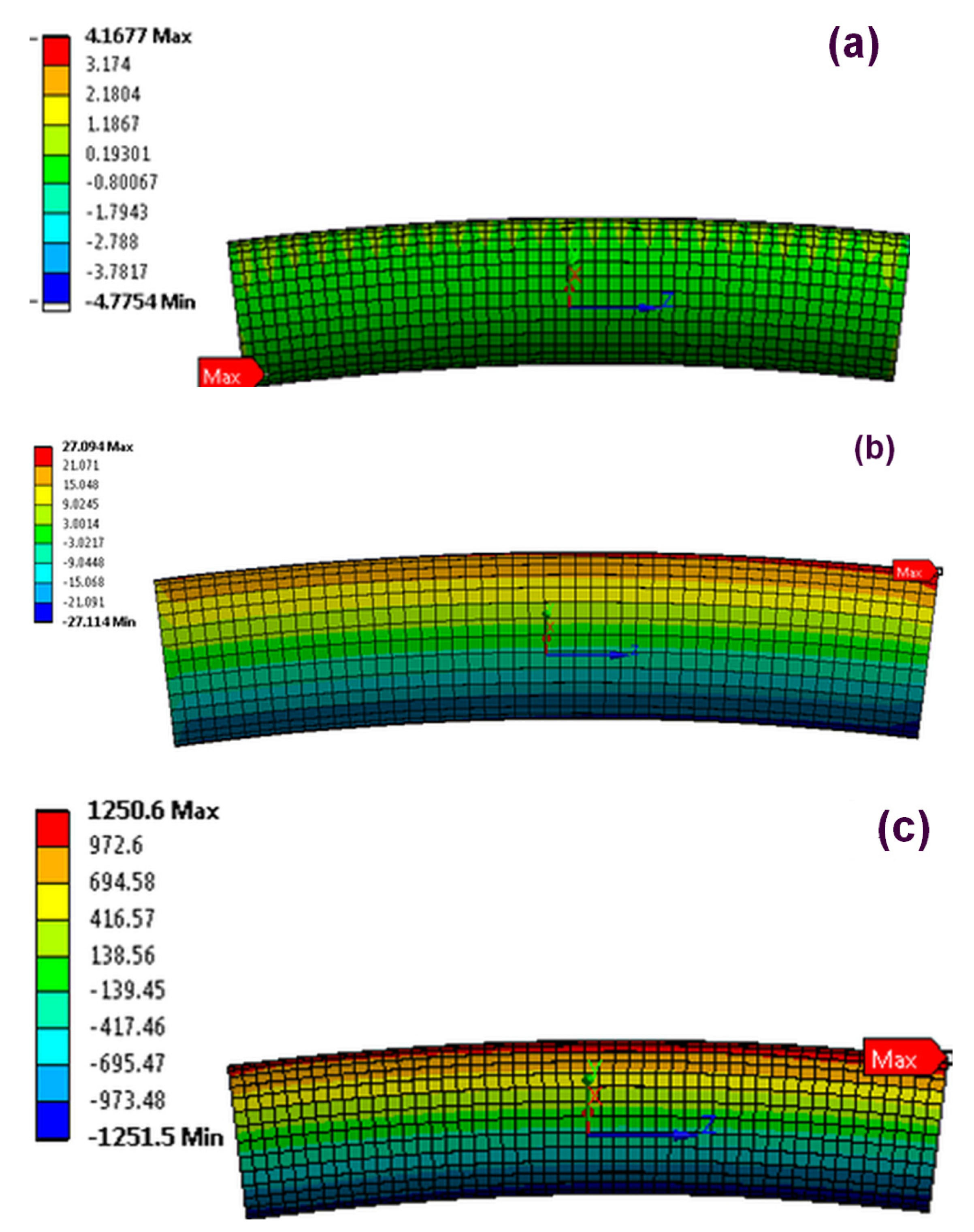
3.5.2. Bending Moments
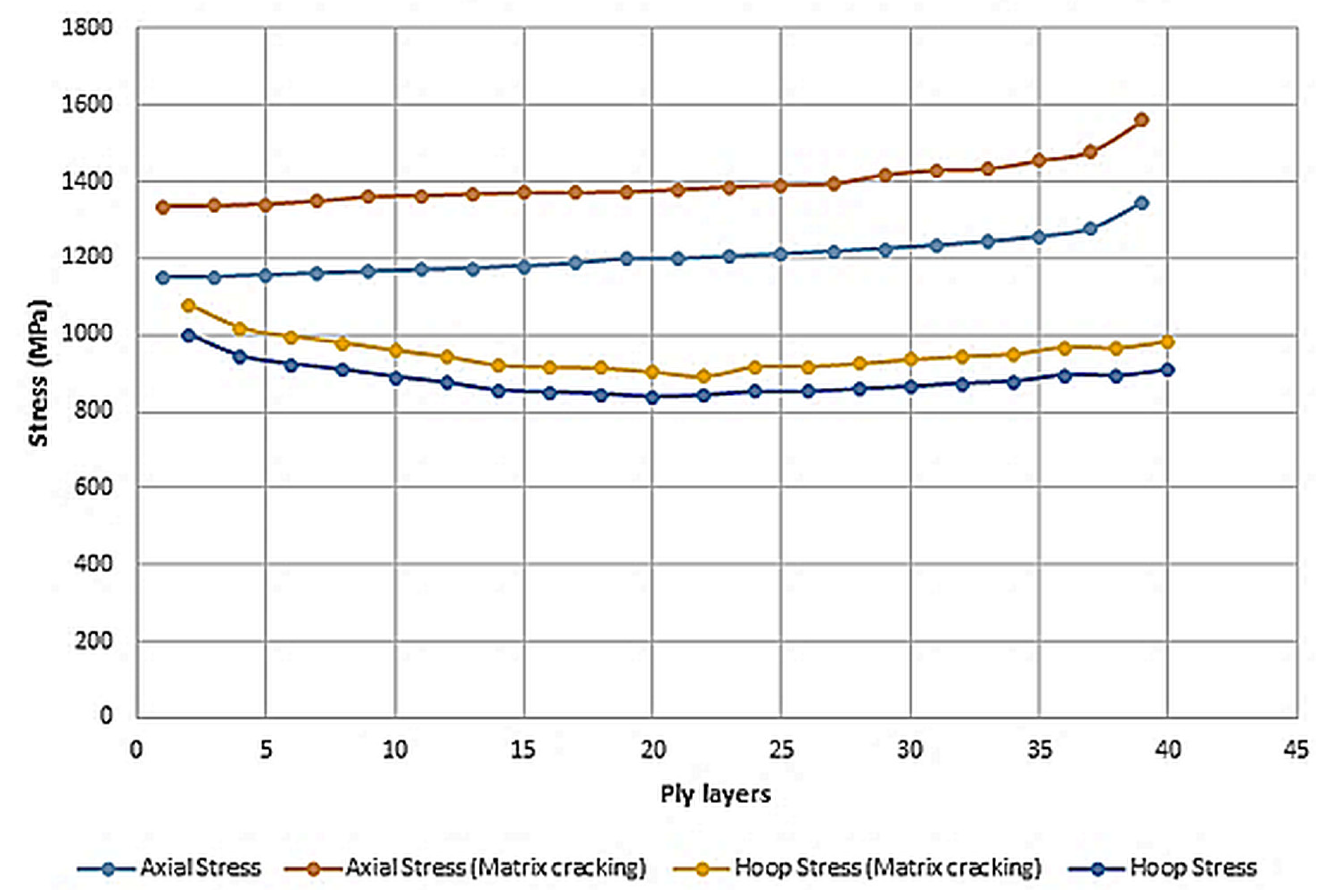
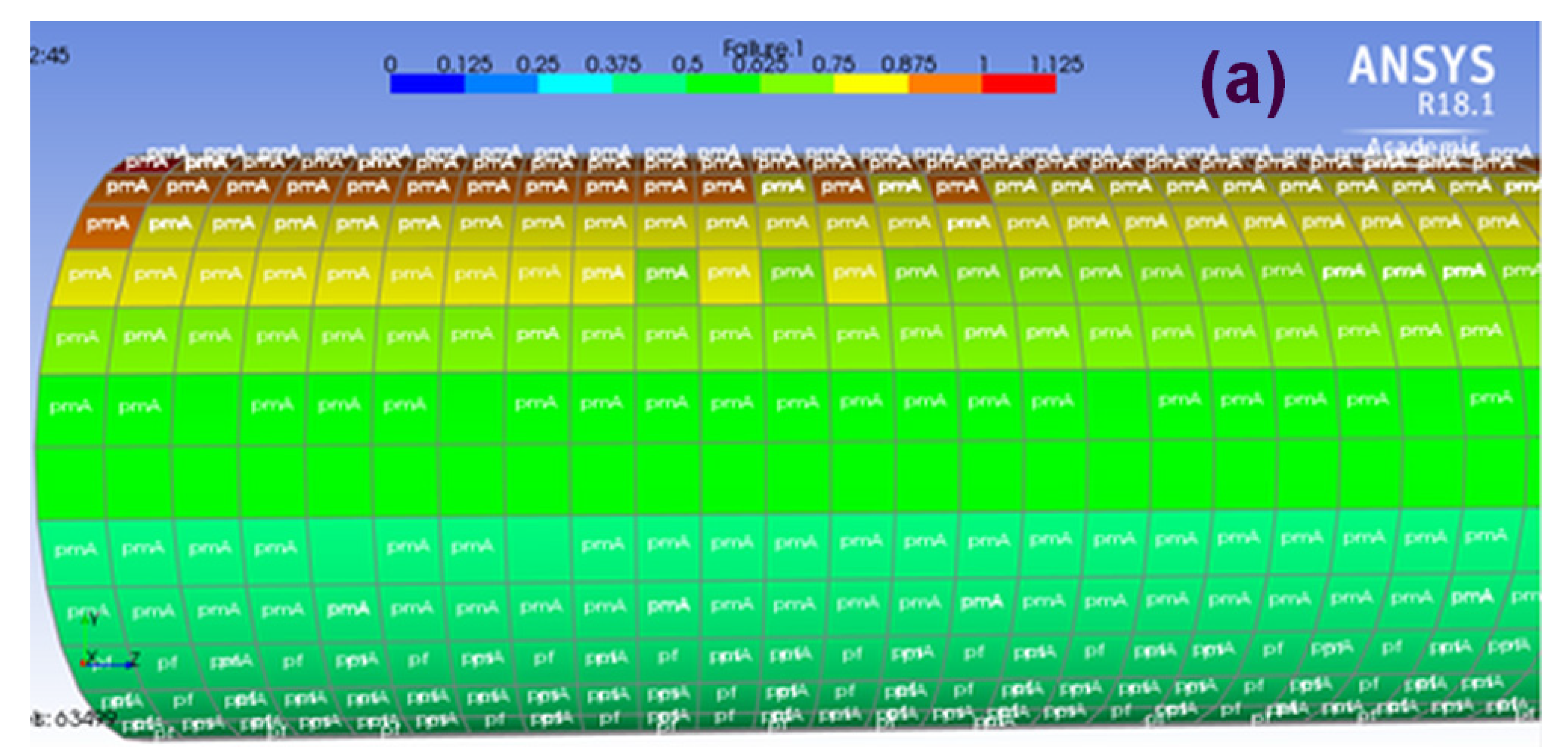
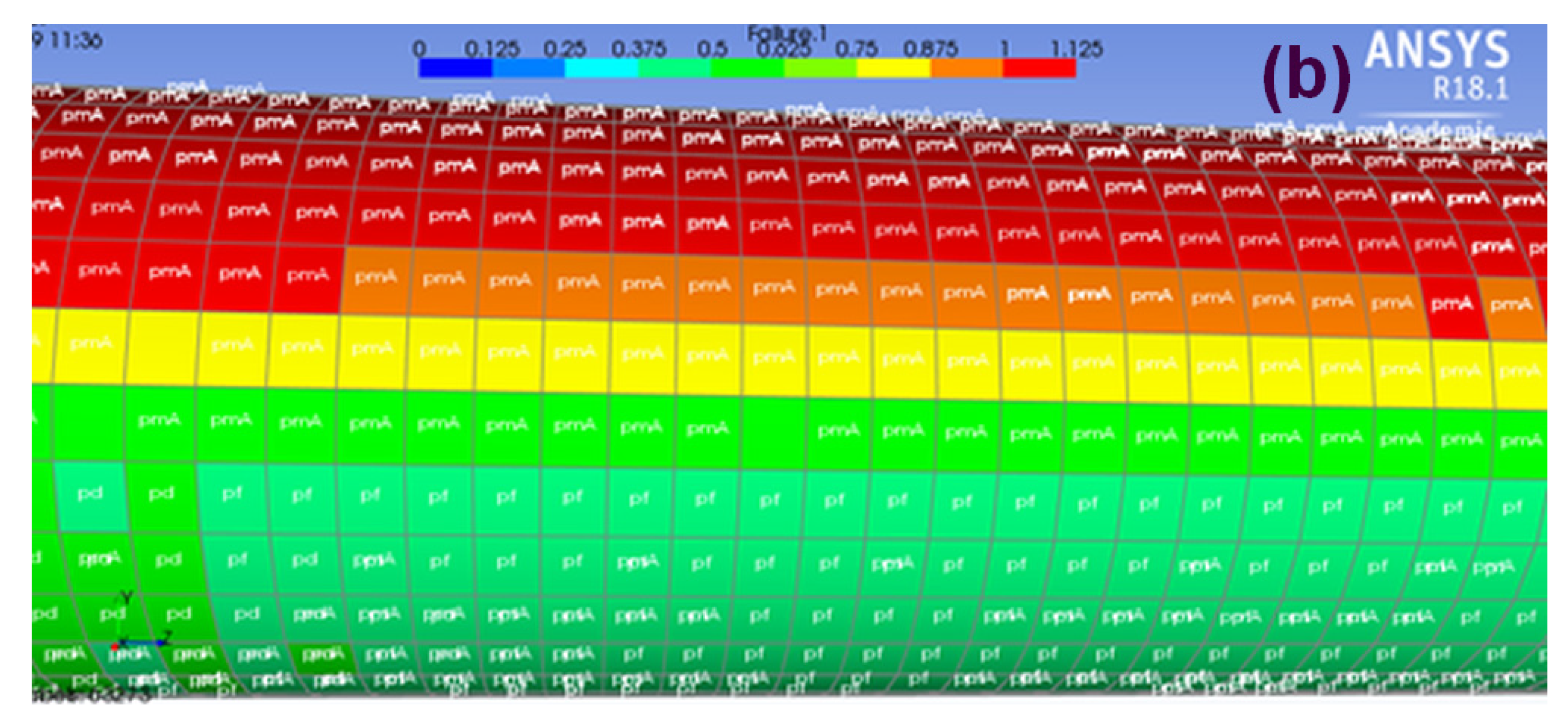
3.5.3. Failure according to Puck Modified Criterion
4. Conclusions and Recommendations
- (1)
- A static analysis for the six most popular flexible riser global configurations was performed and the pliant wave global configuration was selected for further dynamic analysis based on the conservative value for MBR. The dynamic extreme analysis was performed for the normal operations as well as for the accidental state with one mooring line broken. Using worst-case scenario moment, tension, and bending, the local microscale model was created using Ansys®. The key conclusions are presented below.
- (2)
- The dynamic extreme analysis showed that the designed cross-sectional configuration of the riser maintained the integrity of the system under the extreme environmental conditions of the Arctic. The result of the dynamic analysis with floating ice showed that most of the riser’s critical parameters exceeded the maximum allowable limits for this riser. It may be concluded that the flexible risers would require additional measures for mitigating the effect of the floating ice. The riser armour system may be used to as an option to mitigate the effects of the floating ice on the riser system and drive the riser’s parameters within the just allowable limits.
- (3)
- The micro-scale analysis of the composite riser showed that the riser pressure armour would not fail at a 10 m bending radius, which is far less than recommended. Moreover, microcracks will appear in layers with 88° fibre angles at a low bending radius and strain limit than the recommended value of 3.6 m. The layer to absorb the axial stresses should be incorporated to mitigate the low local bending radius due ice floe interaction. In the arctic sea, all risers are recommended to be protected with armour to protect them from the impact of the ice. There are two options for mitigating the effect of the harsh environment of the Arctic:
- (a)
- The turret of the FPU can be submerged deep enough to eliminate the possible coalition of the riser with floating ice. This option can guarantee the integrity of the hybrid riser system to a certain extent. This method has already been used under extreme sea conditions; however, it may be possible that some ice floes can still collide with the riser. At the same time, the extension of the turret will heavily increase the cost of the installation and influence the FPU design.
- (b)
- The riser armour protection can be utilised to minimise the effect of the ice-riser interaction and reduce the cost of the system, but the bending moment of the hybrid riser may remain high. It may be possible that the armour along the few metres of the arclength of hybrid riser cannot guarantee the total protection of the riser.
- (4)
- To reduce the drag effect of the major part of the flowing ice in normal sea state conditions, the extended turret system can be used but in a shorter time window. Concurrently, the riser armour can be used, minimising the effect of the ice in extreme environmental conditions. Finally, such a configuration will help reduce the cost of the turret system and FPU, and will guarantee the riser system’s integrity in normal and extreme environmental conditions.
- (5)
- The effect of environmental loading can be eliminated by using subsea production facilities. The feasibility of using such technology can be analysed for arctic field with technical and economic considerations.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Eik, K.; Gudmestad, O.T. Iceberg Management and Impact on Design of Offshore Structures. Cold Reg. Sci. Technol. 2010, 63, 15–28. [Google Scholar] [CrossRef]
- ISO 19906:2019; Petroleum and Natural Gas Industries—Arctic Offshore Structures. ISO: Geneva, Switzerland, 2019. Available online: https://www.iso.org/standard/65477.html (accessed on 11 February 2023).
- Boateng, J.A.; Diawuo, F.A. Design and Hydrodynamic Loading Analysis of Production Riser for the Arctic. Int. J. Pet. Eng. 2015, 1, 221. [Google Scholar] [CrossRef]
- Nammi, S.K.; Gupta, R.; Pancholi, K. Comparative Strength and Stability Analysis of Conventional and Lighter Composite Flexible Risers in Ultra-Deep Water Subsea Environment. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2022, 09544089221144394. [Google Scholar] [CrossRef]
- Dodds, N.; Pancholi, K.; Jha, V.; Tariq, S.F.; Latto, J. In Situ Investigation of Microstructural Changes in Thermoplastic Composite Pipe Under Compressive Load. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering-OMAE 2014, 6A, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef]
- Derisi, B.; Hoa, S.; Xu, D.; Hojjati, M.; Fews, R. Composite Tube Exhibiting Large Deformation under Bending. J. Compos. Mater. 2010, 44, 2005–2020. [Google Scholar] [CrossRef]
- Pancholi, K.; Jha, V.; Dodds, N.; Huo, D.; Latto, J. In Situ and Real Time X-Ray Computed Tomography for the Micromechanics Based Constitutive Modelling of the Unbonded Flexible Riser. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering-OMAE 2015, 5A, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar] [CrossRef]
- Jha, V.; Latto, J.; Dodds, N.; Anderson, T.A.; Finch, D.; Vermilyea, M. Qualification of Flexible Fiber-Reinforced Pipe for 10,000-Foot Water Depths. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2013. [Google Scholar] [CrossRef]
- Fiabane, J.; Prentice, P.; Pancholi, K. High Yielding Microbubble Production Method. Biomed Res. Int. 2016, 2016, 3572827. [Google Scholar] [CrossRef] [PubMed]
- Gupta, R.; Pancholi, K.; Prabhu, R.; Pancholi, M.; Huo, D.; Jha, V.; Latto, J. Integrated Self-Healing of the Composite Offshore Structures. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Gupta, R.; Dehong, H.; Maggie, W.; Vineet, J.; Gavin, B.G.S.; Ketan, P. Novel method of healing the fibre reinforced thermoplastic composite: A potential model for offshore applications. Compos. Commun. 2019, 16, 67–78. [Google Scholar] [CrossRef]
- Allen, S.; Kassner, C. Global Analysis of the Terra Nova Riser System. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2001. [Google Scholar] [CrossRef]
- Allen, S. 10 Years of Sub Arctic Subsea Projects-Stepping Stones for Arctic Development. Soc. Pet. Eng. Arct. Technol. Conf. 2011, 2, 696–705. [Google Scholar] [CrossRef]
- Hwang, J.K.; Bang, G.J.; Roh, M.I.; Lee, K.Y. Detailed Design and Construction of the Hull of an FPSO (Floating, Production, Storage, And Off-loading Unit). In Proceedings of the Nineteenth International Offshore and Polar Engineering Conference, Osaka, Japan, 21–26 July 2009. [Google Scholar]
- Edmond, C.; Liferov, P.; Metge, M. Ice and Iceberg Management Plans for Shtokman Field. Soc. Pet. Eng. Arct. Technol. Conf. 2011, 2, 600–608. [Google Scholar] [CrossRef]
- Kai-Tung, M.; Luo, Y.; Kwan, C.-T.T.; Wu, Y. Mooring System Engineering for Offshore Structures; Gulf Professional Publishing: Houston, TX, USA, 2019. [Google Scholar]
- Karlinsky, S.L.; Chernetsov, V.A. Floating Production Unit Resistance to Iceberg Impact. OnePetro, 20 June 2010. Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE10/All-ISOPE10/ISOPE-I-10-377/11475 (accessed on 11 February 2023).
- Gabet, C.; Chicheportiche, S.; Vivet, R.; Taravel-Condat, C. Small and Full Scale Testing of Flexible Pipes in Cold Environment for Arctic Use. Soc. Pet. Eng. Arct. Technol. Conf. 2011, 1, 436–444. [Google Scholar] [CrossRef]
- Challenges with Ice-Related Design and Operating Philosophy of the Shtokman Floating Production Unit. Available online: https://www.elibrary.ru/item.asp?id=23965637 (accessed on 11 February 2023).
- Bonnemaire, B. Response of an Armoured Riser to Wave and Ice Actions And to Impacts From Ice Blocks. Int. J. Offshore Polar Eng. 2005, 15. [Google Scholar]
- Gupta, R.; Badel, B.; Gupta, P.; Bucknall, D.; Flynn, D.; Pancholi, K. Flexible Low-Density Polyethylene–BaTiO3 Nanoparticle Composites for Monitoring Leakage Current in High-Tension Equipment. ACS Appl. Nano Mater. 2021, 4, 2413–2422. [Google Scholar] [CrossRef]
- Gupta, R.; Smith, L.; Njuguna, J.; Deighton, A.; Pancholi, K. Insulating MgO-Al2O3-LDPE Nanocomposites for Offshore Medium-Voltage DC Cables. ACS Appl. Electron. Mater. 2020, 2, 1880–1891. [Google Scholar] [CrossRef]
- Kumbhare, N.; Moheimani, R.; Dalir, H. Analysis of composite structures in curing process for shape deformations and shear stress: Basis for advanced optimization. J. Compos. Sci. 2012, 5, 63. [Google Scholar] [CrossRef]
- Talreja, R. Assessment of the Fundamentals of Failure Theories for Composite Materials. Compos. Sci. Technol. 2014, 105, 190–201. [Google Scholar] [CrossRef]
- Tang, W.; Blanche, J.; Mitchell, D.; Harper, S.; Flynn, D. Characterisation of Composite Materials for Wind Turbines Using Frequency Modulated Continuous Wave Sensing. J. Compos. Sci. 2023, 7, 75. [Google Scholar] [CrossRef]
- Gupta, R.; Mitchell, D.; Blanche, J.; Harper, S.; Tang, W.; Pancholi, K.; Baines, L.; Bucknall, D.G.; Flynn, D. A Review of Sensing Technologies for Non-Destructive Evaluation of Structural Composite Materials. J. Compos. Sci. 2021, 5, 319. [Google Scholar] [CrossRef]
- Adams, D.F.; Doner, D.R. Transverse Normal Loading of a Unidirectional Composite. J. Compos. Mater. 1967, 1, 152–164. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Chesterton, C.; Butler, H.O.; Gillet, N.; Wang, C.; Ja’e, I.A.; Reda, A.; Odijie, A.C. Review of composite marine risers for deep-water applications: Design, development and mechanics. J. Compos. Sci. 2022, 6, 96. [Google Scholar] [CrossRef]
- Fergestad, D.; Løtveit, S.A.; Leira, B.J. Life-Cycle Assessment of Flexible Risers. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering-OMAE 2014, 6B, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef]
- Schäkel, M.; Hosseini, S.A.; Janssen, H.; Baran, I.; Brecher, C. Temperature analysis for the laser-assisted tape winding process of multi-layered composite pipes. Procedia CIRP 2019, 85, 171–176. [Google Scholar] [CrossRef]
- Distributed Buoyancy Module-AIS. Available online: https://www.aisltd.com/product/c-float/bardot-distributed-buoyancy-module/ (accessed on 11 February 2023).
- Sævik, S. A Finite Element Model for Predicting Stresses and Slip in Flexible Pipe Armouring Tendons. Comput. Struct. 1993, 46, 219–230. [Google Scholar] [CrossRef]
- Drawshi, M.; Cederbaum, G. Stability of Multiloaded Viscoelastic Nonlinear Beams. Comput. Struct. 1993, 46, 215–218. [Google Scholar] [CrossRef]
- Zhang, H.; Tong, L.; Addo, M.A. Mechanical Analysis of Flexible Riser with Carbon Fiber Composite Tension Armor. J. Compos. Sci. 2020, 5, 3. [Google Scholar] [CrossRef]
- API|API Recommended Practice 2D, 7th ed. Available online: https://www.api.org/products-and-services/standards/important-standards-announcements/spec2d (accessed on 11 February 2023).
- DNV-ST-F201 Riser Systems-DNV. Available online: https://www.dnv.com/oilgas/download/dnv-st-f201-riser-systems.html (accessed on 11 February 2023).
- Amaechi, C.V.; Gillett, N.; Odijie, A.C.; Hou, X.; Ye, J. Composite Risers for Deep Waters Using a Numerical Modelling Approach. Compos. Struct. 2019, 210, 486–499. [Google Scholar] [CrossRef]
- Bai, Y.; Lu, Y.; Cheng, P. Analytical Prediction of Umbilical Behavior under Combined Tension and Internal Pressure. Ocean. Eng. 2015, 109, 135–144. [Google Scholar] [CrossRef]
- Bhavya, S. Failure Analysis of a Composite Cylinder. IOSR J. Mech. Civ. Eng. 2012, 3, 1–7. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mooring Condition | FPU Offset (% of Water Depth) | FPU Offset (m) |
|---|---|---|
| Operational | 10 | 34 |
| Accidental | 12 | 41 |
| Load Case | Limit State | Internal Fluid | FPU Offset | Current |
|---|---|---|---|---|
| 1 | ULS | Empty | Mean | None |
| 2 | ULS | Empty | Far | 180° |
| 3 | ULS | Empty | Near | 0° |
| 4 | ULS | Empty | Cross | 90° |
| 5 | ULS | Operating | Mean | None |
| 6 | ULS | Operating | Far | 180° |
| 7 | ULS | Operating | Near | 0° |
| 8 | ULS | Operating | Cross | 90° |
| 9 | ULS | Flooded | Mean | None |
| 10 | ULS | Flooded | Far | 180° |
| 11 | ULS | Flooded | Near | 0° |
| 12 | ULS | Flooded | Cross | 90° |
| 13 | ALS | Empty | Mean | None |
| 14 | ALS | Empty | Far | 180° |
| 15 | ALS | Empty | Near | 0° |
| 16 | ALS | Empty | Cross | 90° |
| 17 | ALS | Operating | Mean | None |
| 18 | ALS | Operating | Far | 180° |
| 19 | ALS | Operating | Near | 0° |
| 20 | ALS | Operating | Cross | 90° |
| 21 | ALS | Flooded | Mean | None |
| 22 | ALS | Flooded | Far | 180° |
| 23 | ALS | Flooded | Near | 0° |
| 24 | ALS | Flooded | Cross | 90° |
| Catenary | Lazy Wave | Pliant Wave | Steep Wave | Lazy S | Steep S | |
|---|---|---|---|---|---|---|
| Total riser length | 828 m | 828 m | 828 m | 828 m | 828 m | 828 m |
| Upper section | 358 m | 320 m | 320 m | 518 m | 438 m | 588 m |
| Lower section | 470 m (from TDP to PLET) | 308 m (from TDP to PLET) | 308 m (from TDP to PLET) | 110 m | 350 m | 240 m |
| Hung off angle | 8° | 11° | 13° | 19° | 25° | 27° |
| Upper termination point | (1) turret centre, 22 m below MSL | Same as (1) | Same as (1) | Same as (1) | Same as (1) | Same as (1) |
| Buoyant section | 200 m | 200 m | 200 m | |||
| Arc length to the tether clump | - | 634 m | ||||
| Horizontal displacement from the turret to the tether anchor | - | 401 m | ||||
| Tether length | - | 40 m |
| Load Case | Limit State | Internal Fluid | FPU Offset | Current | Wave | Wind |
|---|---|---|---|---|---|---|
| 1 | ULS | Empty | Far | 180° | 180° | 180° |
| 2 | ULS | Empty | Near | 0° | 0° | 0° |
| 3 | ULS | Empty | Cross | 90° | 90° | 90° |
| 4 | ULS | Operation | Far | 180° | 180° | 180° |
| 5 | ULS | Operation | Near | 0° | 0° | 0° |
| 6 | ULS | Operation | Cross | 90° | 90° | 90° |
| 7 | ULS | Flooded | Far | 180° | 180° | 180° |
| 8 | ULS | Flooded | Near | 0° | 0° | 0° |
| 9 | ULS | Flooded | Cross | 90° | 90° | 90° |
| 10 | ALS | Empty | Far | 180° | 180° | 180° |
| 11 | ALS | Empty | Near | 0° | 0° | 0° |
| 12 | ALS | Empty | Cross | 90° | 90° | 90° |
| 13 | ALS | Operation | Far | 180° | 180° | 180° |
| 14 | ALS | Operation | Near | 0° | 0° | 0° |
| 15 | ALS | Operation | Cross | 90° | 90° | 90° |
| 16 | ALS | Flooded | Far | 180° | 180° | 180° |
| 17 | ALS | Flooded | Near | 0° | 0° | 0° |
| 18 | ALS | Flooded | Cross | 90° | 90° | 90° |
| Parameters | |
|---|---|
| Pressure armour ID | (8 in) |
| Pressure armour OD | (8.8588 in) |
| Ply thickness | 0.21 mm (0.008267717 in) |
| Ply stack-up | [0, 88, 0, −88] |
| Stack ups | 10 (40 layers in total) |
| Orthotropic Materials—CFRP | |
|---|---|
| Young’s Modulus X direction | Pa |
| Young’s Modulus Y direction | Pa |
| Young’s Modulus Z direction | Pa |
| Poisson’s Ratio XY | 0.33 |
| Poisson’s Ratio YZ | 0.03 |
| Poisson’s Ratio XZ | 0.33 |
| Shear Modulus XY | Pa |
| Shear Modulus YZ | Pa |
| Shear Modulus XZ | Pa |
| Stress Limits—Tensile X direction | 1632 MPa |
| Stress Limits—Tensile Y direction | 34 MPa |
| Stress Limits—Tensile Z direction | 34 MPa |
| Riser Configuration | Riser Minimum Bending Radius (m) | Riser Effective Tension at Turret (kN) | Riser Effective Tension at PLET (kN) | Riser Bending Moment at Turret (kN·m) | Riser Bending Moment at PLET (kN·m) | Riser Effective Tension at TDP (kN) |
|---|---|---|---|---|---|---|
| Catenary | 19 | 286 | 2.2 | 6.7 | 0 | 22 |
| Lazy Wave | 6 | 169 | 41 | 25 | 0 | 42 |
| Pliant Wave | 13 | 217 | 35 | 11 | 0 | 46 |
| Steep wave | 6 | 303 | 638 | 9 | 23.8 | - |
| Lazy S | 12 | 436 | 55 | 9 | 0 | 61 |
| Steep S | 5 | 514 | 256 | 3.5 | 23.3 | - |
| MBR (m) | Bending Moment (kN·m) | Turret Max Tension (kN) | PLET Max Tension (kN) | TDP Min Tension (kN) | Tether Max Tension (kN) | |
|---|---|---|---|---|---|---|
| Dynamic simulation (ALS/flooded/fat) | 5 | 24 | 467 | 96 | 72 | 90 |
| Riser limits | 3.6 | 33 | 5000 | 5000 | 5000 | - |
| MBR (m) | Bending Moment (kN·m) | Turret Max Tension (kN) | PLET Max Tension (kN) | TDP Min Tension (kN) | Tether Max Tension (kN) | |
|---|---|---|---|---|---|---|
| Dynamic simulation (ALS/flooded/fat) | 1.5 | 87 | 850 | 390 | 25 | 0 |
| Riser limits | 3.6 | 33 | 5000 | 5000 | 5000 | - |
| MBR (m) | Bending Moment (kN·m) | Turret Max Tension (kN) | PLET Max Tension (kN) | TDP Min Tension (kN) | Tether Max Tension (kN) | |
|---|---|---|---|---|---|---|
| Dynamic simulation (ALS/flooded/fat) | 4.5 | 26 | 520 | 96 | 72 | 90 |
| Riser limits | 3.5 | 33 | 2700 | 2700 | 2700 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korotygin, D.; Nammi, S.K.; Pancholi, K. The Effect of Ice Floe on the Strength, Stability, and Fatigue of Hybrid Flexible Risers in the Arctic Sea. J. Compos. Sci. 2023, 7, 212. https://doi.org/10.3390/jcs7060212
Korotygin D, Nammi SK, Pancholi K. The Effect of Ice Floe on the Strength, Stability, and Fatigue of Hybrid Flexible Risers in the Arctic Sea. Journal of Composites Science. 2023; 7(6):212. https://doi.org/10.3390/jcs7060212
Chicago/Turabian StyleKorotygin, Dimitrii, Sathish. K. Nammi, and Ketan Pancholi. 2023. "The Effect of Ice Floe on the Strength, Stability, and Fatigue of Hybrid Flexible Risers in the Arctic Sea" Journal of Composites Science 7, no. 6: 212. https://doi.org/10.3390/jcs7060212
APA StyleKorotygin, D., Nammi, S. K., & Pancholi, K. (2023). The Effect of Ice Floe on the Strength, Stability, and Fatigue of Hybrid Flexible Risers in the Arctic Sea. Journal of Composites Science, 7(6), 212. https://doi.org/10.3390/jcs7060212