
Refereeing the Sport of Squash with a Machine Learning System



Abstract
:1. Introduction
1.1. What Is Squash?
1.2. Interferences and Referee Decisions
“Yes Let decision results in the rally being played again—with the referee deeming that the interference was accidental and both players have made an equal effort to allow play to continue.No Let decision is where the referee rules against the striker’s appeal and awards a point to the retreating player. In this situation, the referee deemed that the retreating player provided unobstructed access and that interference was minimal, therefore the appealing striker could have played a shot.Stroke is when the point is awarded to the appealing player. A stroke is awarded when the referee deems the incoming striker is in a position to play a shot, but suffers interference due to the outgoing player not making every effort to clear”.[1]
“After playing a shot, players must make every effort to ‘clear the ball’ so that when the ball rebounds from the front wall, the opponent has both
- (A)
- (B)
- (C)
1.3. Controversies and Disputes
1.3.1. Regarding the Central Referee
1.3.2. The Video Review System
1.3.3. Controversies and Arguments
1.4. Machine Learning and Literature Review
1.5. Objectives of This Study
2. Materials
2.1. Data Collection
2.1.1. The Professional Squash Association (PSA) YouTube Channel
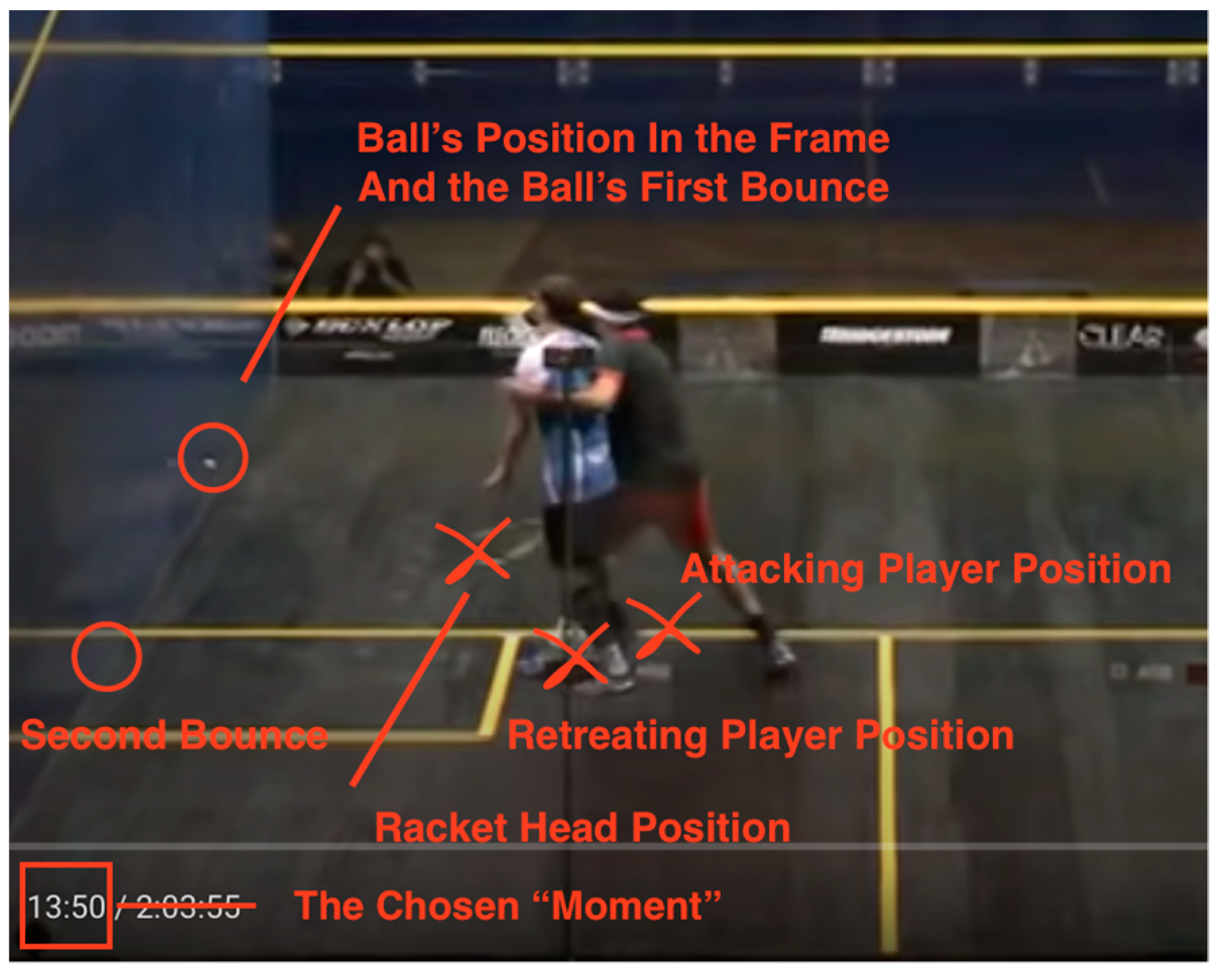
2.1.2. The Definition of “Moment” and Six Data Components
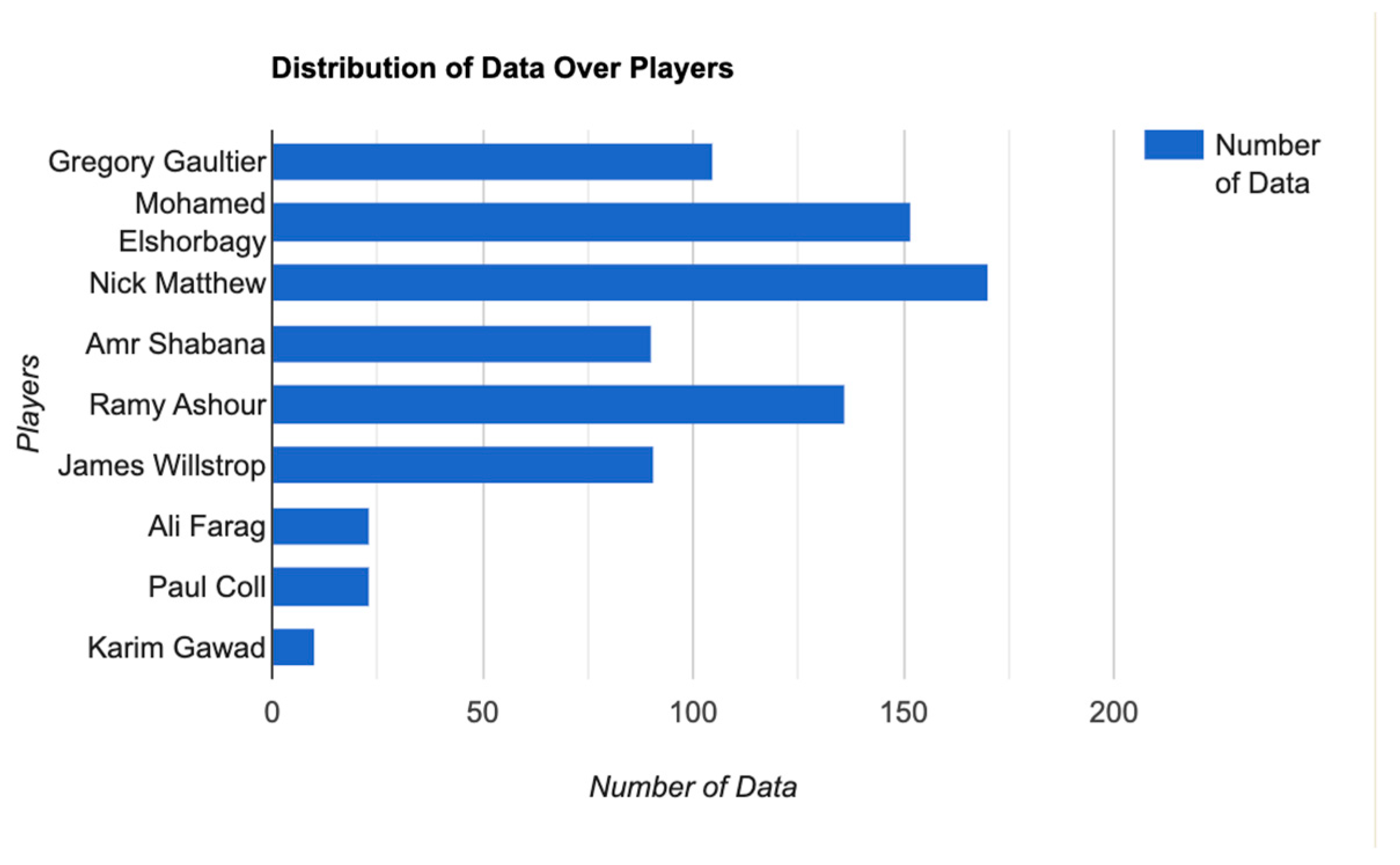
2.2. Data Distribution
3. Methods
3.1. Python, TensorFlow, and Wolfram Mathematica
3.2. Neural Network
3.3. Normalization
3.4. Selection from the Six Data Components
3.5. Modified Data Points
3.5.1. Distance of the Attacking Player (AP) to the Retreating Player (RP)
3.5.2. Distance of the Attacking Player (AP) to the Ball Position in the Frame
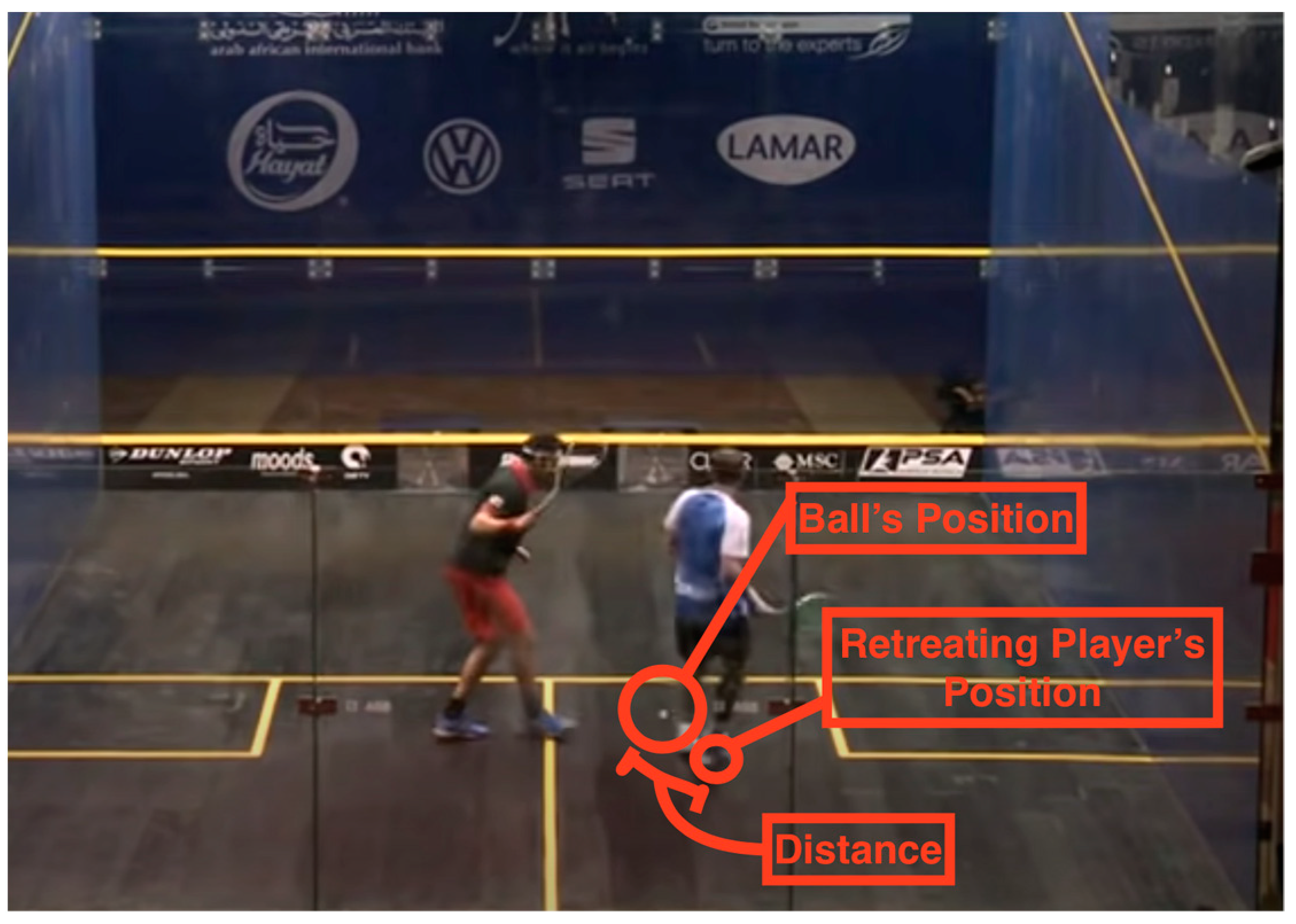
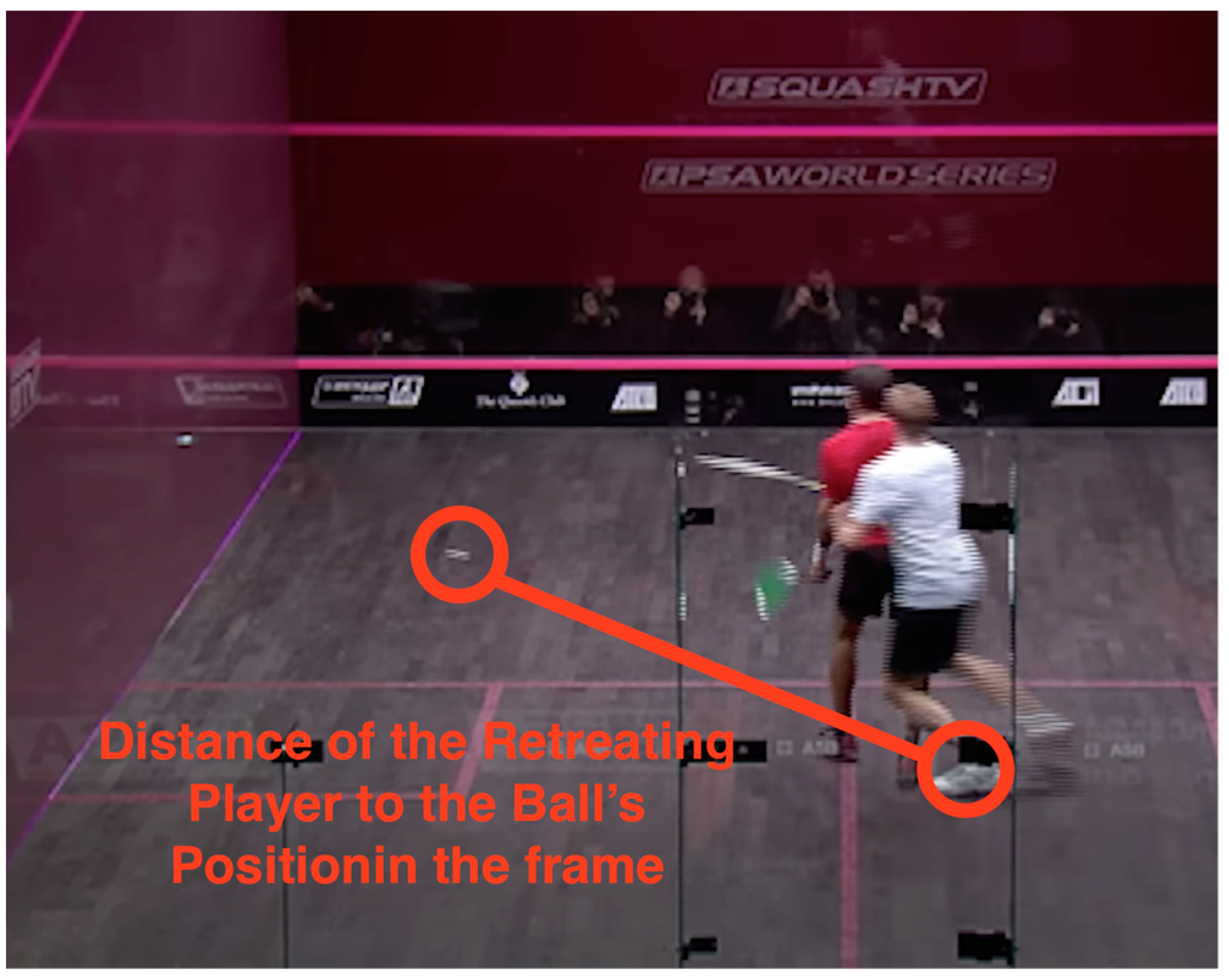
3.5.3. Distance of the Retreating Player (RP) to the Ball Position in the Frame
3.5.4. Distance of the Attacking Player (AP) to the Second Bounce
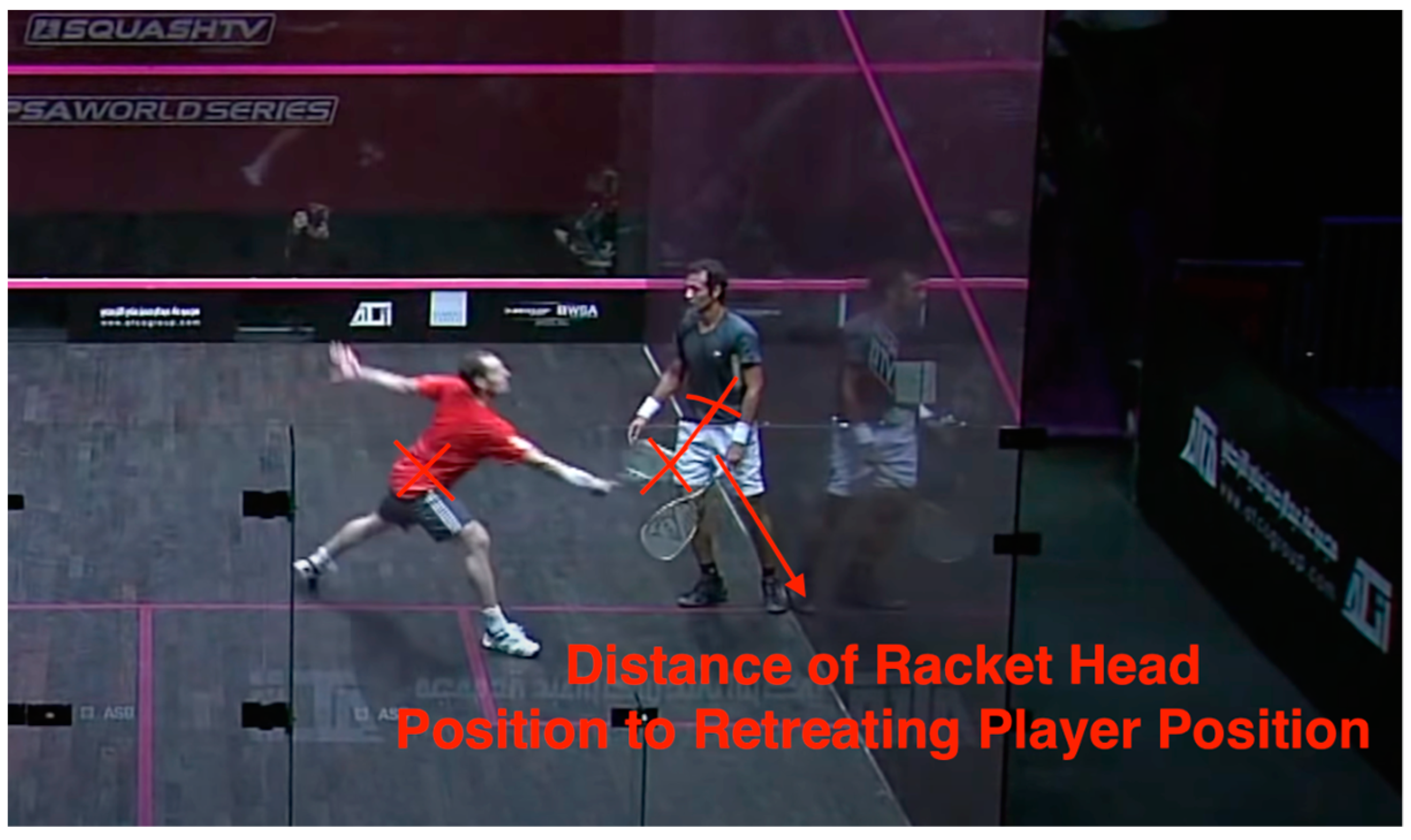
3.5.5. Distance of the Racket Head to the Retreating Player (RP)
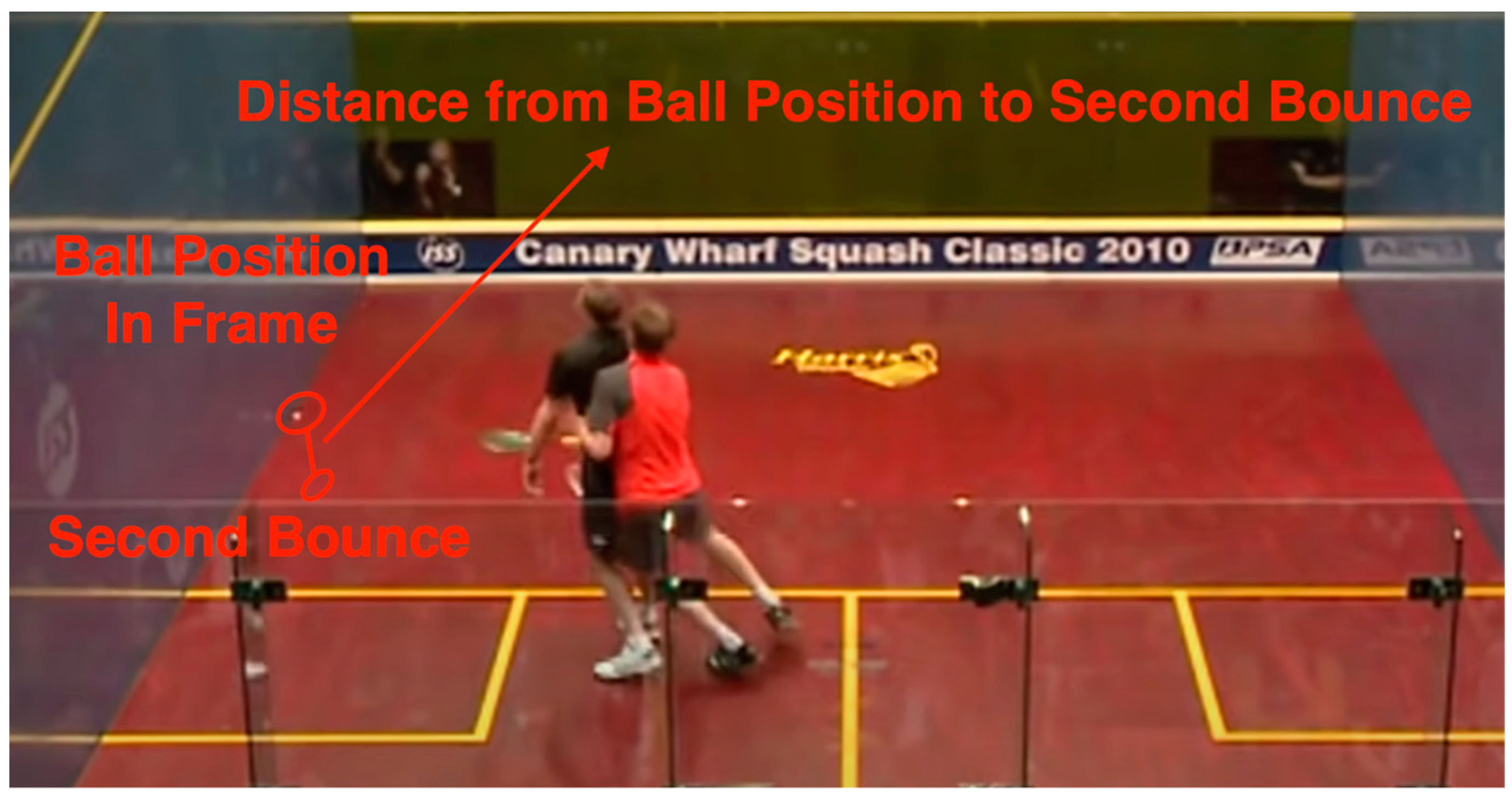
3.5.6. Distance of the Ball Position in the Frame to the Second Bounce
3.5.7. Distance of the Racket Head to the Ball Position in the frame
3.5.8. The Shortest Distance from the Racquet Head to the Path of the Ball
3.5.9. Access to the Front Wall: How Much Is Blocked by the Other Player
4. Results
4.1. Results with Mathematica
4.1.1. Experimental Design
4.1.2. Model Performance on Primitive Data Components
Training on All Six Data Components
Dropping Out Data Components
Dropping out Racket Head Position
Dropping out Racket Head Position and the First Bounce Position
Dropping out Racket Head Position and Second Bounce Position
4.1.3. Model Performance with Modified Data Components
- Distance of the Attacking Player (AP) to the Retreating Player (RP)
- Distance of the Attacking Player to the Ball’s Position in the frame
- Distance of the Retreating Player to the Ball’s Position in the Frame
- Distance of the Attacking Player to the Second Bounce
- Distance of the Racket Head to the Retreating Player
- Distance of the Ball’s Position in the frame to the Second Bounce
- Distance of the Racket Head to the Ball’s Position in the frame
- The Shortest Distance From the Racquet Head to the Path of the Ball
- Access to the Front Wall: How Much is Blocked by the Other Player
All Nine Modified Data Components (MDCs)
Including Modified Data Components (MDCs) #1, #2, #3, #4, #6, #8, #9
Including Modified Data Components (MDCs) #1, #2, #3, #4, #6
4.1.4. Model Performance with Modified Data Components Combined with Primitive Data Components
- 1 and 2: Attacking Player Position X and Y Value
- 3 and 4: Retreating Player Position
- 5 and 6: Ball Position in the frame
- 7 and 8: First Bounce
- 9 and 10: Second Bounce
- 11 and 12: Racket Head Position
- Distance of the Attacking Player (AP) to the Retreating Player (RP)
- Distance of the Attacking Player to the Ball’s Position in the frame
- Distance of the Retreating Player to the Ball’s Position in the frame
- Distance of the Attacking Player to the Second Bounce
- Distance of the Racket Head to the Retreating Player
- Distance of the Ball’s Position in the frame to Second Bounce
- Distance of the Racket Head to the Ball’s Position in the frame
- The Shortest Distance from the Racquet Head to the Path of the Ball
- Access to the Front Wall: How Much is Blocked by the Other Player
Training with all 21 Data Components
Training with Primitive Data Components (PDCs) #1–10 and All Modified Data Components (MDCs)
Training with Primitive Data Components (PDCs) #1–10 and Modified Data Components (MDCs) #3, #5, #6, #8, and #9
4.2. Results with Python
4.2.1. Experimental Design
4.2.2. Model Performance on Primitive Data Components
Training on All Six Data Components
Dropping Out Data Components
4.2.3. Model Performance and Normalization
4.2.4. Model Performance with Modified Data Components
- Distance of the Attacking Player (AP) to the Retreating Player (RP)
- Distance of the Attacking Player to the Ball’s Position in the frame
- Distance of the Retreating Player to the Ball’s Position in the frame
- Distance of the Attacking Player to the Second Bounce
- Distance of the Racket Head to the Retreating Player
- Distance of the Ball’s Position in the frame to Second Bounce
- Distance of the Racket Head to the Ball’s Position in the frame
- The Shortest Distance from the Racquet Head to the Path of the Ball
- Access to the Front Wall: How Much is Blocked by the Other Player
All Nine Modified Data Components (MDCs)
Including Modified Data Components (MDCs) #1, #2, #3, #4, #6, #8, #9
Including Modified Data Components (MDCs) #1, #2, #3, #4, and #6
4.2.5. Model Performance with Modified Data Components Combined with Primitive Data Components
- 1 and 2: Attacking Player Position X and Y value
- 3 and 4: Retreating Player Position
- 5 and 6: Ball Position in the frame
- 7 and 8: First Bounce
- 9 and 10: Second Bounce
- 11 and 12: Racket Head Position
- Distance of the Attacking Player (AP) to the Retreating Player (RP)
- Distance of the Attacking Player to the Ball’s Position in the frame
- Distance of the Retreating Player to the Ball’s Position in the frame
- Distance of the Attacking Player to the Second Bounce
- Distance of the Racket Head to the Retreating Player
- Distance of the Ball’s Position in the frame to Second Bounce
- Distance of the Racket Head to the Ball’s Position in the frame
- The Shortest Distance from the Racquet Head to the Path of the Ball
- Access to the Front Wall: How Much is Blocked by the Other Player
Training with all 21 data Components
Training with Primitive Data Components (PDC) 1–10 and All Modified Data Components (MDCs)
Training with Primitive Data Components (PDCs) #1–10 and Modified Data Components (MDCs) #3, #5, #6, #8, and #9
5. Discussion
5.1. Analysis of Result
5.1.1. Overall Result
5.1.2. Usefulness of Different Data Components
5.1.3. Estimation of Real-Life Referee Accuracy
“Baseball umpires are, by the most optimistic estimates, only 90% accurate in calling balls and strikes. While this might sound impressive, we only know this because of the already-99%-accurate Pitchf/x system Major League Baseball uses in every ballpark to evaluate its umpires. Moreover, the 9% difference in accuracy between human umpires and Pitchf/x is enormous … And as determinations of sporting facts go, ball-strike calls are relatively simple: the umpire, from a static position, need only track one object moving directly toward him/her with the plate and the batter’s stance to help indicate the strike zone. Things are much more complicated and difficult in other sports …”[34]
5.2. Case-by-Case Analysis of Some Wrong Calls
5.2.1. Yes Lets Classified Incorrectly
“Well, I mean eh, it’s not the best of shots here from Matthew (the RP). This is going to be interesting, Massarella (the referee) is gotta be consistent… If you watch where the ball bounces, the second bounce is by the service line…. Well, I can assure you that Gregory Gaultier (the AP) will not be taking John Massarella out for any type of food or beverage… I think that was a stroke”.[38]
5.2.2. No Lets Classified Incorrectly
5.2.3. Strokes Classified Incorrectly
5.3. Novel Contributions of this Study
6. Limitations
6.1. Limitations in the Data Collection Process
6.1.1. Dataset Is Too Small and Imbalanced
6.1.2. Speed and Height of the Ball
6.1.3. Assumed All Decisions Are Correct
6.1.4. Took in Different Standards of Refereeing
6.1.5. Different Definition of “Moment”
6.1.6. When the Ball Bounces off the Back Wall
6.1.7. Time Taken to Clear
6.1.8. Speed and Arm Length of Different Players
6.1.9. Situations of No Appeal
6.1.10. Ability to Further Move
6.1.11. Ability to Make a Shot
6.1.12. Degree of Interference
6.2. Limitations Caused by Abstract Refereeing Concepts
6.2.1. Idea of “Wrong Path”
6.2.2. Idea of “Accepting Interference”
6.2.3. Idea of “Minimal Interference” and “Lack of Effort”
“We’ve seen Ramy Ashour (the AP) do this, he does actually get to the ball, but there is interference on his way through… Oh, there’s not much interference, minimal there, it’s minimal. So the question for the referee is why doesn’t he go through and play that? There’s not a huge amount of interference. This could stay as a No Let, you know, purely because of lack of effort…He could have clearly played the ball, he elected not to, and he’s paid the price. I think that’s a good decision (No Let)”.[30]
6.2.4. Idea of “Punishment for Bad Shot”, “Going around Opponent”, and “Shut Out”
“He’s taken his space there, Elshorbagy (the RP). Loose shot from Nick Matthew (the AP). Nick Matthew has to go around the back of Elshorbagy if he wants to go and get that ball. (The other commentator) Well, it’s his shot to play, Elshorbagy. Definitely his shot to play. But you also, I mean, this is where you get the middle ground. Because it’s his (the RP’s) shot to play, therefore Matthew needs to go around and play the ball, but then he (the RP) also needs to give access”.[25]
6.2.5. Idea of “Not Allowing to Clear”
7. Conclusions
- Wolfram Mathematica achieved a best average accuracy of 86% ± 3.03%; Python achieved a best average accuracy of 85.2% ± 5.1%.
- The accuracies indicate near-human performance, as in most squash matches with 20 to 30 decisions, the referees already make approximately 3 controversial decisions in each match.
- Our model has high potential for improvement, as in this study it is trained with a limited amount of data and lacks essential information such as time and speed. The performance of our model is bound to improve significantly with a larger training data set (say, with 10 or even 100 times more referee decisions).
- Compared to human referees, the models trained through machine learning follow a singular refereeing standard, do not have a limited attention span, and make decisions almost instantly.
- Our model can potentially serve as an extra refereeing official for professional squash matches.
8. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

Appendix C

Appendix D

Appendix E

Appendix F

Appendix G

Appendix H

Appendix I

Appendix J

Appendix K. Glossary of Terms
- Accuracy: In machine learning, the degree to which the predictions of a model match the actual outcomes. High accuracy indicates effective performance of the model.
- Attacking Player (AP): In squash, the player who is actively making a play or shot at the ball.
- Back Wall: The wall at the rear of a squash court, often including a back glass wall for viewing.
- Ball’s Position in the Frame: A term used in video analysis of squash, referring to the location of the ball at a specific moment in time, usually captured in a video frame.
- Ball’s Projected First Bounce: The anticipated location where the ball will first bounce after being struck by a player.
- Ball’s Projected Second Bounce: The predicted location of the ball’s second bounce, important in determining the playability of a shot in squash.
- Clear the Ball: A term used in squash referring to the action of a player moving away from the ball after playing a shot, to avoid obstructing the opponent.
- Crowd Noise Influence: The effect that audience reactions can have on the performance or decisions of players and referees in sports, including squash.
- Data Augmentation: A technique in machine learning to increase the diversity of data available for training models, potentially applicable for enhancing squash match analysis.
- Dataset: A collection of data used for training machine learning models. In this context, it refers to the data gathered from squash matches for analysis.
- Distance Values: Metrics used in the analysis of squash matches, measuring distances between players, between players and the ball, and other spatial relationships relevant to decision making in the game.
- Fishing: In squash, “fishing” refers to a player’s tactic where they deliberately seek to draw a foul or earn a favorable decision from the referee rather than actively attempting to play the ball.
- Four-Wall Court: Describes the squash playing area, which is enclosed by four walls—front, back, and two sides.
- Front Wall: The main wall in a squash court where the ball must hit for a shot to be valid.
- Heatmaps: Visual representations showing the frequency or intensity of various phenomena in data analysis. In squash, heatmaps can indicate players’ positions or movements on the court over time.
- Interference: A situation in squash where one player’s play is obstructed by the presence or movement of the opponent.
- In-Bound Shot: A shot in squash that meets the game’s rules for a valid play, typically involving hitting the front wall above the tin and below the out line.
- Junior and College Squash: Levels of squash play that typically involve younger or student athletes, often with different dynamics and challenges compared to professional levels.
- Machine Learning (ML): A field of artificial intelligence that uses algorithms to analyze data, learn from its patterns, and make predictions or decisions without being explicitly programmed for specific tasks.
- Neural Networks: A subset of machine learning models designed to simulate the way human brains analyze and process information, consisting of interconnected nodes (neurons) working in layers to perform complex computations.
- Nick: The junction between the wall and the floor in a squash court; shots hitting the nick are often difficult to return.
- No Let: A decision in squash where the referee denies a player’s request to replay a point, often due to minimal or no interference, or if the player could not have played the ball regardless of the interference.
- Outline: The upper boundary on the front wall and side walls in squash; balls hitting above this line are out of play.
- Player Detection and Motion Analysis: Techniques in video analysis used to identify players’ positions and analyze their movements during a match.
- Positional Values: Data points referring to the positions of players, the ball, and other relevant spatial elements in a squash match.
- Professional and Amateur Squash Matches: Different levels of squash play, each with varying degrees of skill, rules, and formalities.
- Professional Squash Association (PSA): The global governing body for professional squash, responsible for organizing tournaments and maintaining rules and standards.
- Python: A high-level programming language known for its readability and versatility, widely used in data science, machine learning, and many other areas.
- Racket Head Position: The location of the head of the squash racket, significant in determining a player’s ability to hit the ball or the type of shot they are attempting.
- Rally: A series of back-and-forth shots between players in a squash game, beginning with a serve and continuing until a point is scored or a fault occurs.
- Referee Decision: In the context of squash, decisions made by a referee regarding points, fouls, or other aspects of the game, often influenced by player interactions and ball dynamics.
- Refereeing Standards: The guidelines and principles that referees use to make decisions in squash matches.
- Retreating Player (RP): The player who has just played the ball and is moving away to allow the opponent (attacking player) to play the next shot.
- Serve (and Return of Serve): The act of putting the ball into play at the beginning of a rally in squash. The return of serve is the opponent’s first shot in response to the serve.
- Shot Types: Various types of shots in squash like drives, volleys, boasts, drops, lobs, etc., each with specific strategic purposes.
- Side Wall: The walls on either side of a squash court, which can be used to alter the ball’s trajectory.
- Squash: A high-intensity racket sport played by two players in a four-walled court, where players hit a small rubber ball against the front wall under specific rules.
- Squash Court Dimensions: Standard measurements of a squash court, significant for understanding player movements and spatial strategies.
- Strategic Shots: Shots in squash that are executed with specific tactical intentions to gain an advantage over the opponent.
- Stroke: A refereeing decision in squash where one player is awarded a point due to significant interference by the opponent.
- TensorFlow: An open-source software library used for numerical computation and machine learning applications, particularly for training and deploying neural networks.
- Tin: The lower part of the front wall in a squash court, hitting which results in a fault or ‘out’ shot.
- Video Footage Reviewing and Labeling: The process of analyzing video recordings of squash matches to identify and label specific actions and decisions for data collection.
- Video Review System: A technology used in sports, including squash, for reviewing decisions or actions during a match, often involving slow-motion and multiple-angle replays.
- Wolfram Mathematica: A computational software used in scientific, engineering, and mathematical fields, known for its advanced data analysis capabilities.
- Yes Let: A call by the squash referee to replay a point, typically made when interference occurs, but it is deemed accidental or minimal.
References
- PSA World Tour. Squash Rules—The Basics Explained. PSA World Tour. 26 January 2023. Available online: https://www.psaworldtour.com/news/squash-rules-the-basics-explained/ (accessed on 20 August 2023).
- SQUASHTV. Elias v Asal|World Tour Finals 2022–2023|FREE LIVE MATCH! [Video]. YouTube. 21 June 2023. Available online: https://www.youtube.com/watch?v=Fg_7zxHsFUU&t=2123s (accessed on 20 August 2023).
- Brumann, C.; Kukuk, M.; Reinsberger, C. Evaluation of open-source and pre-trained deep convolutional neural networks suitable for player detection and motion analysis in squash. Sensors 2021, 21, 4550. [Google Scholar] [CrossRef]
- Hu, T.; Zheng, M.; Li, J.; Zhu, L.; Hu, J. A scene-adaptive motion detection model based on machine learning and data clustering. Multimed. Tools Appl. 2015, 74, 2821–2839. [Google Scholar] [CrossRef]
- Menashe, J.; Kelle, J.; Genter, K.; Hanna, J.; Liebman, E.; Narvekar, S.; Zhang, R.; Stone, P. Fast and Precise Black and White Ball Detection for RoboCup Soccer. In RoboCup 2017: Robot World Cup XXI; Akiyama, H., Obst, O., Sammut, C., Tonidandel, F., Eds.; RoboCup 2017. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2018; Volume 11175. [Google Scholar]
- Hiemann, A.; Kautz, T.; Zottmann, T.; Hlawitschka, M. Enhancement of Speed and Accuracy Trade-Off for Sports Ball Detection in Videos—Finding Fast Moving, Small Objects in Real Time. Sensors 2021, 21, 3214. [Google Scholar] [CrossRef]
- Bayram, F.; Garbarino, D.; Barla, A. Predicting Tennis Match Outcomes with Network Analysis and Machine Learning. In SOFSEM 2021: Theory and Practice of Computer Science. SOFSEM 2021, Bolzano-Bozen, Italy, 25–29 January 2021; Bureš, T., Ed.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2021; Volume 12607. [Google Scholar]
- Maier, T.; Meister, D.; Trösch, S.; Wehrlin, J.P. Predicting biathlon shooting performance using machine learning. J. Sports Sci. 2018, 36, 2333–2339. [Google Scholar] [CrossRef] [PubMed]
- Capobianco, G.; Di Giacomo, U.; Mercaldo, F.; Nardone, V.; Santone, A. Can Machine Learning Predict Soccer Match Results? In Proceedings of the 11th International Conference on Agents and Artificial Intelligence, Prague, Czech Republic, 19–21 February 2019; SciTePress: Setúbal, Portugal, 2019; Volume 2, pp. 458–465. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Nguyen DT, A.; Ma, B.; Hu, J. The application of machine learning and deep learning in sport: Predicting NBA players’ performance and popularity. J. Inf. Telecommun. 2021, 6, 217–235. [Google Scholar] [CrossRef]
- Draschkowitz, L.; Draschkowitz, C.; Hlavacs, H. Predicting Shot Success for Table Tennis Using Video Analysis and Machine Learning. In Intelligent Technologies for Interactive Entertainment. INTETAIN 2014, Chicago, IL, USA, 9–11 July 2014; Reidsma, D., Choi, I., Bargar, R., Eds.; Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer: Cham, Switzerland, 2014; Volume 136. [Google Scholar] [CrossRef]
- Balmer, N.J.; Nevill, A.M.; Lane, A.M.; Ward, P. Influence of crowd noise on soccer refereeing consistency in soccer. J. Sport Behav. 2007, 30, 130. [Google Scholar]
- Dohmen, T.; Sauermann, J. REFEREE BIAS. J. Econ. Surv. 2016, 30, 679–695. [Google Scholar] [CrossRef]
- Morgulev, E.; Azar, O.H.; Lidor, R.; Sabag, E.; Bar-Eli, M. Searching for Judgment Biases Among Elite Basketball Referees. Front. Psychol. 2018, 9, 2637. [Google Scholar] [CrossRef] [PubMed]
- Murray, S.; James, N.; Perš, J.; Mandeljc, R.; Vučković, G. Using a situation awareness approach to determine decision-making behaviour in squash. J. Sports Sci. 2018, 36, 1415–1422. [Google Scholar] [CrossRef] [PubMed]
- Professional Squash Association (PSA). PSA Squash TV [YouTube Channel]. YouTube. 9 January 2012. Available online: https://www.youtube.com/@squashtv (accessed on 20 August 2023).
- SQUASHTV. Squash: Full Match—2014 El Gouna International SF—Elshorbagy v Gaultier [Video]. YouTube. 25 December 2014. Available online: https://www.youtube.com/watch?v=HyX7IV-YhKo&list=PlxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=130 (accessed on 20 August 2023).
- PSA World Tour. PSA to Roll Out Video Review for All TV Events. World Squash. 8 September 2011. Available online: https://www.worldsquash.org/psa-to-roll-out-video-review-for-all-tv-events/ (accessed on 20 August 2023).
- Chang, Y.H.; Chung, C.Y. Classification of Breast Cancer Malignancy Using Machine Learning Mechanisms in TensorFlow and Keras. In Future Trends in Biomedical and Health Informatics and Cybersecurity in Medical Devices. ICBHI 2019. IFMBE Proceedings, Taipei, Taiwan, 17–20 April 2019; Lin, K.P., Magjarevic, R., de Carvalho, P., Eds.; Springer: Cham, Switzerland, 2020; Volume 74. [Google Scholar]
- Kompella, S.; Likith Vishal, B.; Sivalaya, G. A Comparative Study of Classification Algorithms Over Images Using Machine Learning and TensorFlow. In Mobile Computing and Sustainable Informatics. Lecture Notes on Data Engineering and Communications Technologies; Shakya, S., Bestak, R., Palanisamy, R., Kamel, K.A., Eds.; Springer: Singapore, 2022; Volume 68. [Google Scholar]
- Gundina, M.A.; Zhdanovich, M.N. Automatic localization of a car license plate in the Wolfram Mathematica system. Sci. Technol. 2022, 21, 367–373. [Google Scholar] [CrossRef]
- Ortigoza, G.; Zapata, U. COVID-19 Projections: A Simple Machine Learning Approach. In Proceedings of the 2021 IEEE International Conference on Engineering Veracruz (ICEV), Boca del Río, Veracruz, Mexico, 25–28 October 2021; pp. 1–4. [Google Scholar] [CrossRef]
- SQUASHTV. PSA Rewind: Willstrop v Gawad—2018 Grasshopper Cup—Full Squash Match [Video]. YouTube. 18 March 2020. Available online: https://www.youtube.com/watch?v=2T6AXYrhwZQ&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=72 (accessed on 20 August 2023).
- SQUASHTV. Squash: Full Match—2014 Tournament of Champions—Shabana v Matthew [Video]. YouTube. 24 December 2014. Available online: https://www.youtube.com/watch?v=OI0xHMRut88&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=125 (accessed on 20 August 2023).
- SQUASHTV. Squash: Full Match—2014 British Open SF—Matthew v Elshorbagy (British Open) [Video]. YouTube. 25 December 2014. Available online: https://www.youtube.com/watch?v=nwzMnIECgDk&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=127 (accessed on 20 August 2023).
- SQUASHTV. Squash Archive: Shabana v Matthew—2012/13 World Tour Finals [Video]. YouTube. 5 June 2019. Available online: https://www.youtube.com/watch?v=AASrbKRyAUo&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=79 (accessed on 20 August 2023).
- SQUASHTV. SQUASH: Full Match—2012 PSA World Championship Final—Ashour v Elshorbagy [Video]. YouTube. 24 December 2013. Available online: https://www.youtube.com/watch?v=s6QcWY5wEak&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=119 (accessed on 20 August 2023).
- SQUASHTV. Squash: Full Match—Canary Wharf 2010 SF—Matthew v Willstrop [Video]. YouTube. 5 October 2013. Available online: https://www.youtube.com/watch?v=HtwckCfSIHU&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=118 (accessed on 20 August 2023).
- SQUASHTV. Squash: Full Match—2011 World Series Finals, Final—Shabana v Gaultier [Video]. YouTube. 5 October 2013. Available online: https://www.youtube.com/watch?v=fdYZePDe69s&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=118 (accessed on 20 August 2023).
- SQUASHTV. Squash: Free (Match) Friday—Ashour v Gaultier—British Open 2013 Final [Video]. YouTube. 18 March 2016. Available online: https://www.youtube.com/watch?v=5O3fpxcExu0&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=115 (accessed on 20 August 2023).
- SQUASHTV. Squash: Farag v Coll—Full Match—British Open 2019—Christmas Cracker [Video]. YouTube. 25 December 2019. Available online: https://www.youtube.com/watch?v=ntNh7L1pTag&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=77 (accessed on 20 August 2023).
- Saini, V. Average Shoulder Width for Men and Women. Fitness Volt. 18 April 2023. Available online: https://fitnessvolt.com/average-shoulder-width/#:~:text=According%20to%20the%20same%20CDC,the%2030%2D39%20age%20group (accessed on 20 August 2023).
- Wolfram. (n.d.). Classifying Data with Neural Networks. Classifying Data with Neural Networks-Wolfram Language Documentation. Available online: https://reference.wolfram.com/language/tutorial/NeuralNetworksClassification.html (accessed on 20 August 2023).
- Bordner, S.S. Why You Don’t Have to Choose between Accuracy and Human Officiating (But You Might Want to Anyway). Philosophies 2019, 4, 33. [Google Scholar] [CrossRef]
- Williams, M.T. MLB Umpires Missed 34,294 Ball-Strike Calls in 2018. Bring on Robo-Umps? Boston University, BU Today. 8 April 2019. Available online: https://www.bu.edu/today/2019/mlb-umpires-strike-zone-accuracy/ (accessed on 14 January 2024).
- Tranfield, J.K. Stress and Coping in High Performance Squash Coaching. Doctoral Dissertation, Loughborough University, Loughborough, UK, 2002; p. 527. Available online: https://repository.lboro.ac.uk/articles/Stress_and_coping_in_high_performance_squash_coaching_/9609314/files/17256035.pdf (accessed on 20 August 2023).
- Ma, Enqi. Personal Communication with Juan Jose Torres (unpublished), 2021 Squash US Junior Open U17 Champion, 2022 Squash US Junior Open U19 Champion, 2022 Squash World Junior Championship U19 #5, 14 Jan 2024.
- SQUASHTV. Squash: 100k Subscriber Special—Matthew v Gaultier ToC 2018 Full Match [Video]. YouTube. 18 December 2018. Available online: https://www.youtube.com/watch?v=6lniVi_ScJI&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=82 (accessed on 20 August 2023).
- SQUASHTV. Best Squash Match Ever? 2014 World Championship Final: Ashour v Elshorbagy—Full Match [Video]. YouTube. 25 December 2014. Available online: https://www.youtube.com/watch?v=-xs8EUlCL5o&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=116 (accessed on 20 August 2023).
- SQUASHTV. Squash: Free (Match) Friday—2013/14 World Series Finals—Elshorbagy v Ashour FINAL [Video]. YouTube. 6 May 2016. Available online: https://www.youtube.com/watch?v=lpEQp1raU00&list=PLxmhcE3iz1lCnuIXg2hOHD29HooENItXg&index=113 (accessed on 20 August 2023).
















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.762 | 0.750 | 0.775 | 0.712 | 0.737 |
| Loss | 0.714 | 0.729 | 0.656 | 0.725 | 0.761 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.825 | 0.712 | 0.813 | 0.700 | 0.800 |
| Loss | 0.747 | 0.571 | 0.461 | 1.03 | 0.491 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.800 | 0.75 | 0.738 | 0.788 | 0.738 |
| Loss | 0.930 | 0.643 | 0.624 | 0.552 | 0.662 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.788 | 0.800 | 0.800 | 0.775 | 0.75 |
| Loss | 0.714 | 0.525 | 0.526 | 0.934 | 0.634 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.738 | 0.675 | 0.775 | 0.712 | 0.738 |
| Loss | 0.568 | 0.752 | 0.617 | 0.752 | 0.943 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.625 | 0.712 | 0.712 | 0.825 | 0.712 |
| Loss | 0.849 | 0.679 | 0.733 | 0.59 | 0.714 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.825 | 0.837 | 0.762 | 0.774 | 0.825 |
| Loss | 0.685 | 0.374 | 0.430 | 0.615 | 0.603 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.813 | 0.800 | 0.775 | 0.813 | 0.850 |
| Loss | 0.557 | 0.538 | 0.421 | 0.535 | 0.985 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.775 | 0.75 | 0.887 | 0.762 | 0.850 |
| Loss | 0.573 | 0.530 | 0.353 | 0.528 | 0.545 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.850 | 0.813 | 0.837 | 0.850 | 0.837 |
| Loss | 0.562 | 1.32 | 0.561 | 0.425 | 0.547 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.875 | 0.762 | 0.875 | 0.837 | 0.912 |
| Loss | 1.39 | 0.764 | 0.319 | 0.399 | 0.252 |
| Trial 1 | Trial 2 | Trial 3 | Trial 4 | Trial 5 | |
|---|---|---|---|---|---|
| Accuracy on the Test Set | 0.875 | 0.813 | 0.837 | 0.850 | 0.875 |
| Loss | 0.466 | 0.760 | 0.472 | 0.424 | 0.364 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, E.; Kabala, Z.J. Refereeing the Sport of Squash with a Machine Learning System. Mach. Learn. Knowl. Extr. 2024, 6, 506-553. https://doi.org/10.3390/make6010025
Ma E, Kabala ZJ. Refereeing the Sport of Squash with a Machine Learning System. Machine Learning and Knowledge Extraction. 2024; 6(1):506-553. https://doi.org/10.3390/make6010025
Chicago/Turabian StyleMa, Enqi, and Zbigniew J. Kabala. 2024. "Refereeing the Sport of Squash with a Machine Learning System" Machine Learning and Knowledge Extraction 6, no. 1: 506-553. https://doi.org/10.3390/make6010025
APA StyleMa, E., & Kabala, Z. J. (2024). Refereeing the Sport of Squash with a Machine Learning System. Machine Learning and Knowledge Extraction, 6(1), 506-553. https://doi.org/10.3390/make6010025