1. Introduction
In recent years, smart grids have become a very important topic and are extensively debated in the literature [
1]. A smart grid is a network that can efficaciously monitor and manage the transport of electricity produced by generators to meet the varying electricity demands of end-users [
2,
3]. To add intelligence to a smart grid, the network must integrate signal processing blocks and communication logic. Conventionally, methods such as the use of parallel capacitors, tap-changing transformers and SVC (Static Var Compensator) are adopted [
4]. These power controls generally lack precision and do not work in real time; to overcome these limitations, different solutions relying on FPGA (Field Programmable Gate Array)-implemented algorithms can be exploited [
5]. In the last few years, the application of FPGA devices has increased exponentially in a wide variety of fields, such as: digital signal processing [
6,
7,
8,
9,
10], data processing [
11,
12], bioinformatics [
13,
14] and power electronics [
15,
16,
17]. Among the applications based on FPGAs that recently have been applied to the smart grid field, MPC (Model Predictive Control) has particular importance [
18,
19,
20]. An MPC is a control strategy that allows predicting the output of a discrete-time model, combining the input data and the current state of the model to choose the optimal control action. Implementing the complicated and challenging algorithms on FPGA devices can help to minimize the real-time response. Moreover, exploiting FPGAs in this context can lead to a strong advantage in terms of flexibility, reliability and costs [
1,
20]. In [
20], an example of FPGA application is presented and, specifically, the strategy of voltage control in a smart grid is proposed.
The FPGAs are also used in converters and, in particular, in inverter-based applications, such as switching control, voltage balance and fault detection [
16]. An inverter is a DC/AC converter that transforms a DC input voltage into a symmetrical AC output voltage. The field of inverter applications has been widely investigated: solutions where inverters are connected in parallel to form a microgrid (a kind of small-scale grid that contains distributed generators of various natures) have been proposed in the literature [
21,
22,
23]. The parallel connection of inverters improves redundancy and then reliability, but it is very sensitive and complicated because each module must have the same output voltage as the others. Not respecting this requirement leads to crosscurrent or circulating current between the inverters with the effect of reducing power efficiency and system reliability. The circulating current behavior in multiparallel connected inverters has been widely discussed in [
24,
25,
26,
27]. In [
24], the authors studied the effect of this current in a system with two inverters and in a more general case of N inverters. In both cases, they reported that the phenomenon exists if there is a difference in the output voltage phase or frequency. The authors also concluded that the circulating current is independent of the load, that is, a current superimposed on the normal current and, finally, that can cause power exchange among the inverters connected (in the case of a no load or low-load condition). In [
25], an active rejection control based on a Reduced-order Extended State Observer (RESO) is reported. The scheme proposed reduces the mutual currents with a less model-dependent control design.
In [
28], the authors studied the circulating current phenomenon, mentioning control methods such as droop control, master–slave control, instantaneous current sharing control and parallelism control. The droop-control method allows one to regulate the frequency and the amplitude of the inverter output voltage by adjusting the active and reactive-power flow through a linear dependence. In particular, the frequency can be used to control the active-power flow, while the amplitude of the output voltage to control the reactive-power flow [
21]. In [
29], the authors discussed a different approach of the droop control for parallel-connected inverters based on active and reactive currents: handling active and reactive current instead of active and reactive power has the advantage that, in case of short circuiting, the control of active and reactive currents avoids the risk of an infinite current due to any non-zero active or reactive powers. Another example of application can be found in [
30], in which the authors use a dynamic phasor-based model and a SOGI-FLL (Second-Order Generalized Integrator Frequency-Locked-Loop) to implement a droop-controlled parallel-connected inverter system. The master–slave control is composed of a master inverter that operates in a voltage-controlled mode while all the other inverters, the slaves, operate in a current-controlled mode. In [
31], a master–slave application with a wireless communication and current sharing control among the inverters is described: it is a centralized technique in which all the inverters share information about the current shared among them. In [
32], the parallelism control is applied to a UPS-based system. In [
33], the authors analyzed a method to suppress the cross-circulating current based on virtual impedance. In [
34], the authors presented a new wireless load-sharing control method that is designed to improve the performances of the parallel-connected inverters. They also defined the circulating current and proposed an adaptive droop-control method. Another type of control is presented and discussed in [
35]; the authors realized a system controlled by local hardware managers and a central application manager connected with an optical fiber.
Some approaches based on FPGA devices have also been studied: in [
36], a controller developed on DSP (Digital Signal Processor) and FPGA for paralleling multiple inverters is presented. The controller is shared among the units and a synchronization scheme exploiting UPP (Universal Parallel Port) protocol is introduced to eliminate the synchronization delay. Moreover, in [
37], an FPGA innovative control is proposed. The presented approach does not require communication among units, and it is applied to a system with only two parallel inverters.
In this paper, a new approach to solve the several inverters parallelism problems and minimize the circulating current is presented. A new control method has been studied with the main purpose of controlling the system without any type of communication among the inverters and without introducing other structures such as a PID controller, as is typically described in literature [
21,
34,
35]. For this purpose, the advantages of FPGA devices have been exploited: while conventional controllers operate sequentially, FPGAs are parallel processing devices, allowing the execution of complicated tasks in reduced time. Moreover, the FPGA hardware structure is not fixed, but can be reprogrammed by the user, adapting it to the application. In this scenario, FPGAs only control their own inverter and do not care about the operation mode of the other inverters (that can be operative or not) connected to the network. The proposed control method exploits high FPGA clock frequency to react to the circulating current as fast as possible. This feature allows for limitation of the circulating current peaks to prevent the damage of the devices. Moreover, the absence of communication between the inverters reduces the system complexity and costs, avoiding the realization of a dedicated communication line and protocol. The proposed control method permits one to realize scalable systems where modules, each one including an FPGA and an inverter, can be simply connected or disconnected to the system.
The system has been developed and simulated with a model-based design approach compliant with automatic code generation. Exploiting these techniques allows one to reduce the time-to-market and, above all, guarantees greater portability of the system since the design process is vendor-independent and, in the exporting phase, it is possible to select different types of FPGAs.
The paper is organized in four sections. After this introduction, a detailed description of the system architecture is presented in
Section 2. In
Section 3, results are presented and discussed; then, in
Section 4, conclusions are drawn.
2. Materials and Methods
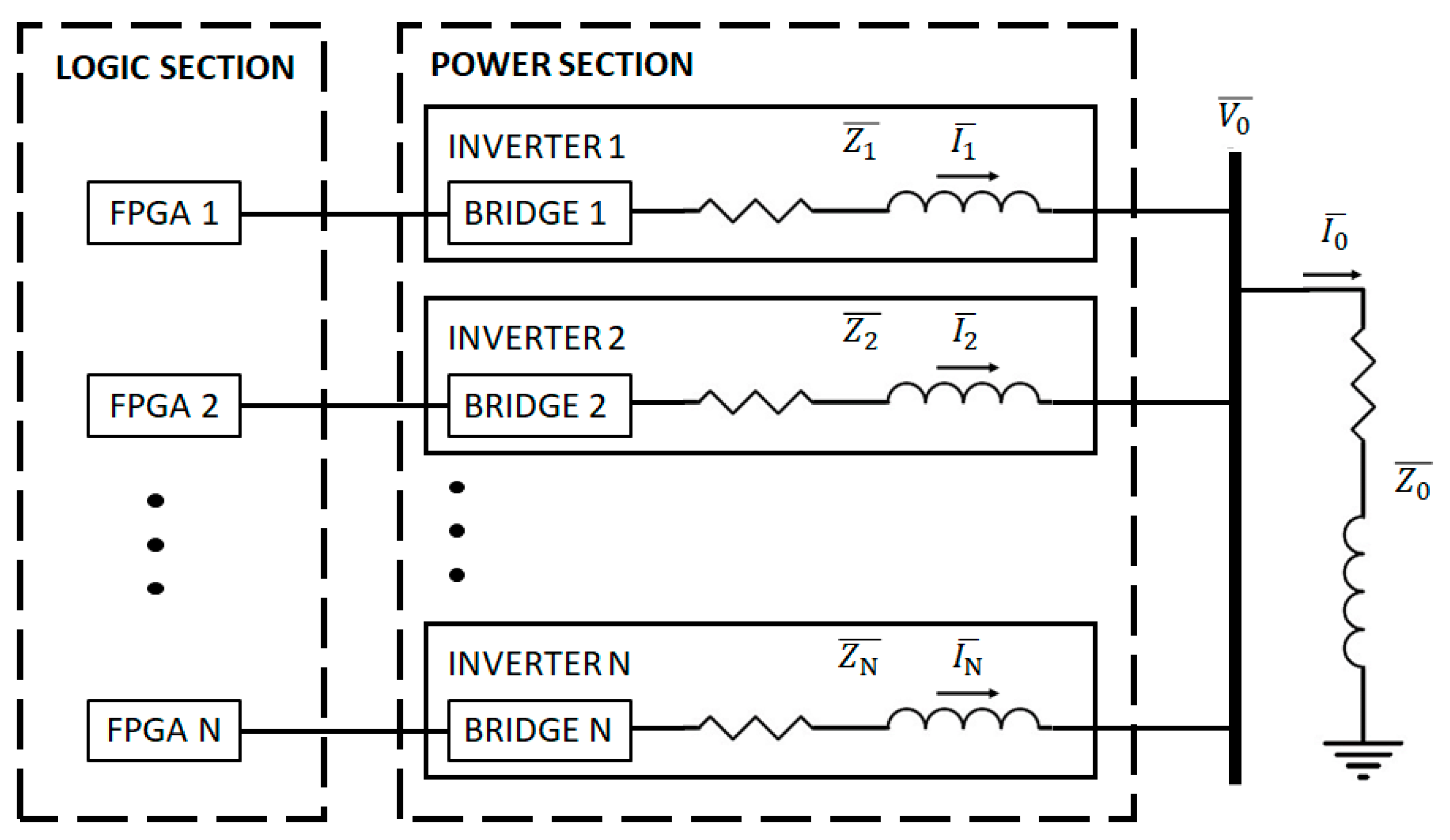
The system proposed is composed by N inverters connected in parallel as shown in
Figure 1. The power section is based on the equivalent model presented in [
38].
,
and
are the output currents of the inverters,
,
and
are the impedances of the units,
is the load impedance and
is the load voltage. Each inverter module has its control logic (FPGA) and a BRIDGE module to convert the FPGA signal (0–3.3 V) to the output voltage (±300 V).
The parallel connection of singular units could generate a circulating current that flows towards the inverters, due to the attempt to impose different voltages on the same output. To limit this current, a suitable control method, to be implemented on every single FPGA module, is proposed, to synchronize the inverter outputs. Comparators, implemented on the FPGAs, are introduced to detect if the module output current assumes values out of a predetermined range. If this situation occurs, an FPGA reset signal brings back to the ordinary operation by modifying the Pulse-Width Modulation (PWM) signal controlling the BRIDGE. The method just described implies the absence of intercommunication between the inverters differently from what has been seen in the literature, allowing the design of a scalable and easier system.
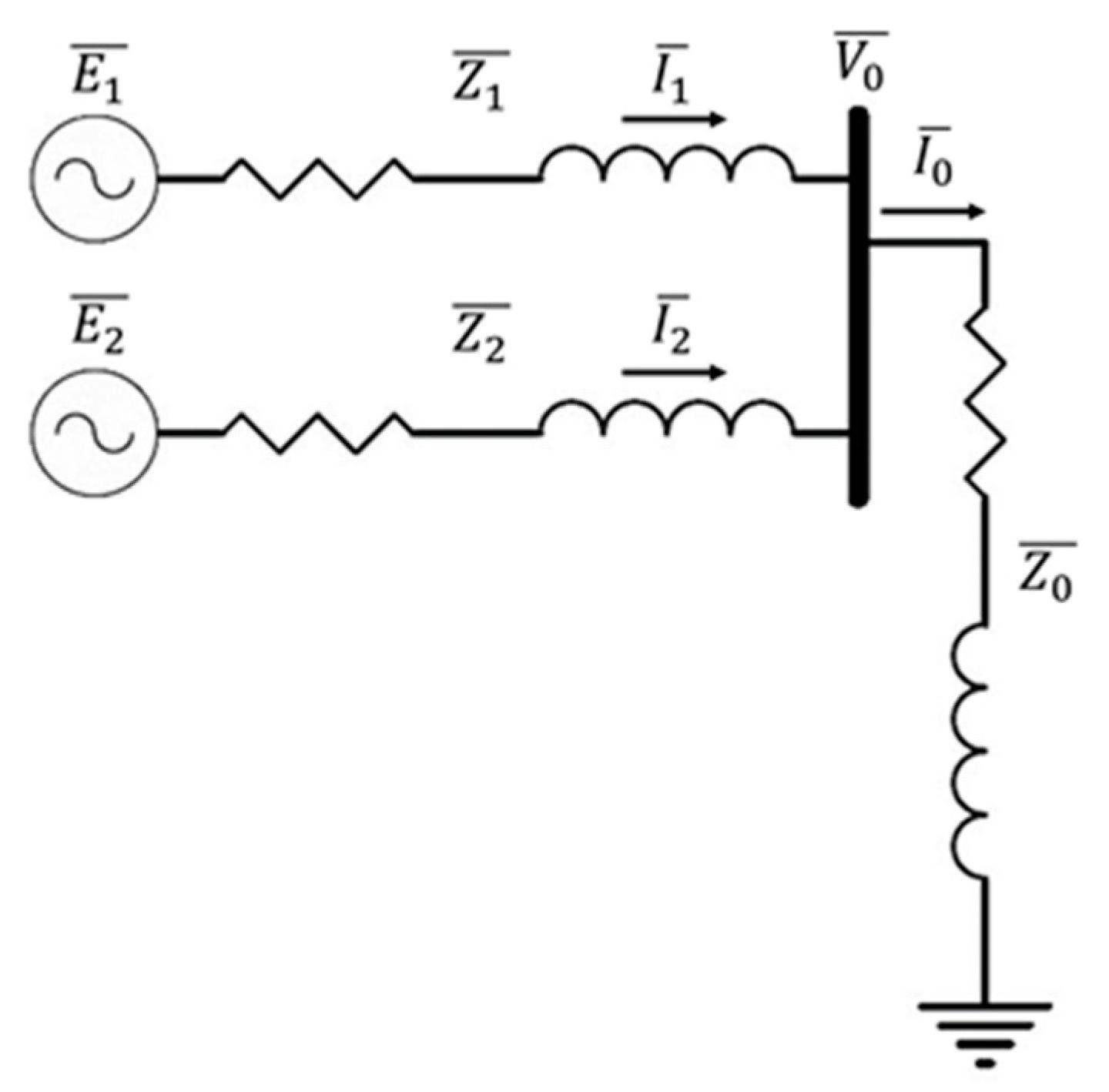
Initially, to prove the validity of the approach, a simple structure with two inverters connected in parallel has been considered.
The schematic of this structure is depicted in
Figure 2.
and
are, respectively, the output voltages of the first inverter and the second inverter. As described in
Figure 1,
and
are the impedances of the modules,
is the load impedance,
is the load current and
the load voltage. The simulated system includes 10 kW inverters, a 600 V DC-link and a PWM at frequency of 50 kHz. A unit line impedance with an inductive part of 250 nH and a resistive part of 1 mΩ has been considered, together with an inductive load of a 1 mH in series with a resistance of 1 mΩ. In this paper, a Simulink model conceived to be exported via a Hardware Description Language (HDL) coder to a vendor-independent code has been designed. A 100 MHz system clock frequency, usually implemented on medium-level FPGA boards (e.g., Xilinx Artix-7 XC7A100T FPGA), has been considered. After the simulation of the system composed of two inverters, a second set of simulations has been considered, extending the approach to a greater number of parallel-connected inverters. MATLAB and Simulink with Simscape and Stateflow add-ons have been used to simulate the system behavior and to develop the new control idea. MATLAB is a powerful tool that allows multidomain simulation, thanks to a vast variety of available tools. Simulink is a MATLAB-based graphical programming environment that is widely used for model-based design. In this work, Simulink has been utilized with Simscape, a MATLAB add-on employed to create models of physical systems. Specifically, Simscape Electrical provides component libraries for modelling and simulating electronic, mechatronics and electrical power systems. Stateflow is another important tool that is able to design and simulate Finite State Machine (FSM) and logical flowchart. All the MATLAB functions, Simulink models and Stateflow charts used in this work are compatible with HDL Coder (Hardware Description Language Coder), which allows for converting models in synthesizable VHDL and Verilog code automatically on an FPGA.
In order to understand how the system reacts to anomalies in Pulse-Width Modulation (PWM) signals, the two parallel-connected inverters system without any control logic has been firstly simulated with varying PWM frequencies, phases and duty cycles. Then, the new control method, based on the Finite State Machine (FSM) algorithm, has been applied, controlling the current of each module of the network, starting from a steady-state condition, with the FPGAs that manage a smart reset logic to automatically start the PWM signals on the basis of measured circulating current. The extension of the developed algorithm to the N-inverter case has been then introduced to test the generalization capability.
2.1. Circulating Current Phenomenon
The circulating current has been defined as the difference between the output current of each inverter and the average current (that is the sum of the outputs current divided by the number of inverters) [
24]:
where
I1 and
I2 are the output currents of the first and the second inverter,
Iavg is the average output current,
IH1 and
IH2 are the circulating currents seen by the first inverter and by the second inverter, respectively. All the currents are expressed in Ampère.
The discussion so far can be generalized in the case of N inverters. Similar to what has been performed previously, the current seen by each inverter can be calculated as:
where
k is the number of the inverter considered,
Ek is the output voltage of the
k-th inverter and
V0 the load voltage, both expressed in Volt.
Zk is the load impedance in Ohm. The average output current, then, is defined as:
where
Ij is the output current of the
j-th inverter and N is the number of inverters.
Finally, the circulating current seen by an inverter in a system with N parallel-connected inverters can be calculated as the difference of its own output current and the average current:
where
k is the inverter number,
N is the total number of inverters and
is the circulating current seen by the
k-th inverter expressed in Ampère.
2.2. Designed System
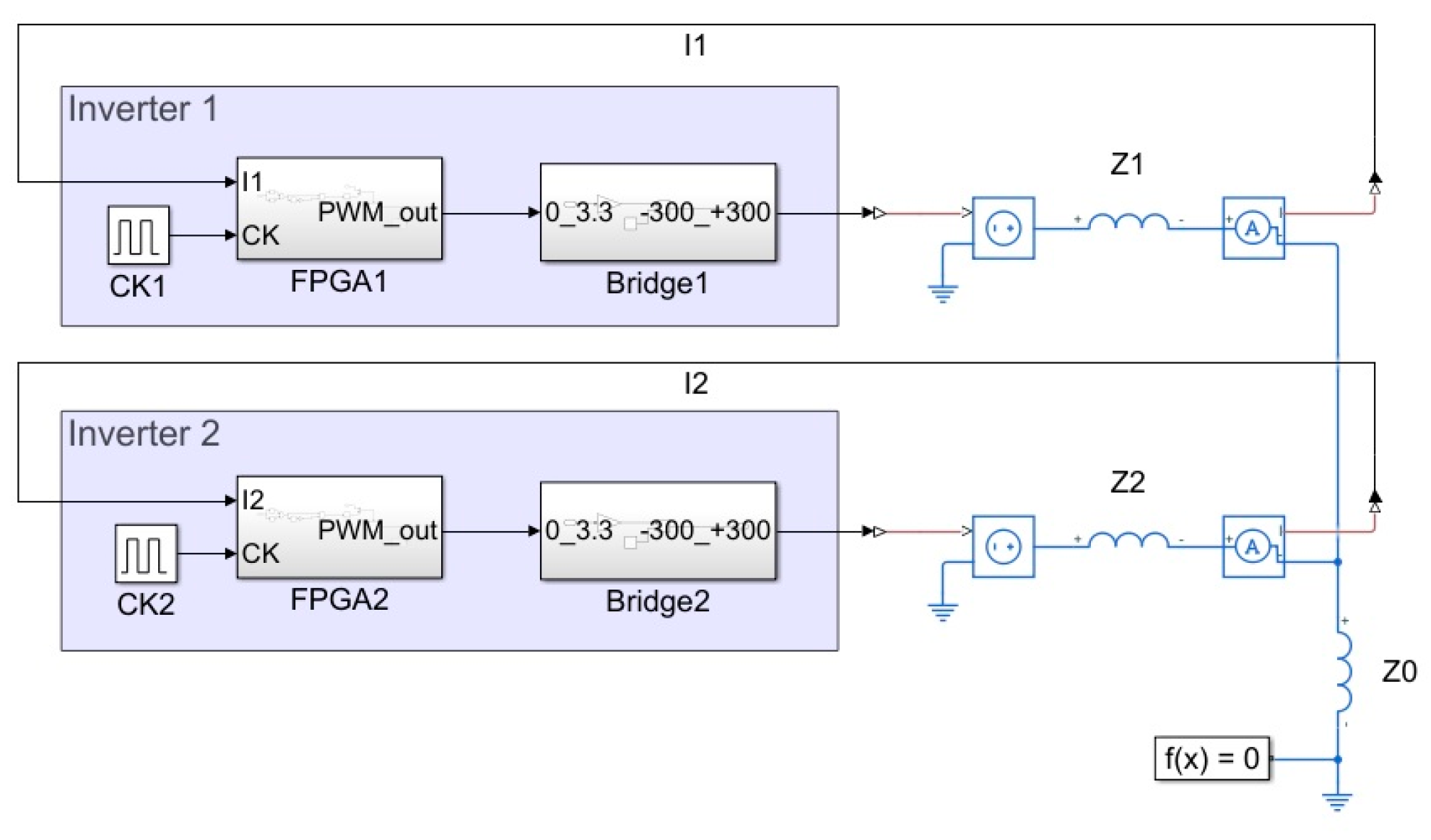
The system described before has been simulated in Simulink.
Figure 3 is an example of a model-based system designed for
N = 2.
In this case, the impedance lines, Z1 and Z2, are equal with a resistive part of 1 mΩ and an inductive part of 250 nH. They represent the non-ideality of the cables used to connect the inverters to the load, while Z0 is the load impedance composed of a resistive part of 1 mΩ and an inductive part of 1 mH. The subsystems, FPGA1 and FPGA2, contain the core of the simulation model: the FSM that controls the PWM and its reset logical rules. The subsystems, BRIDGE1 and BRIDGE2, are the modules dedicated to converting the FPGA signal (0–3.3 V) to the output voltage (±300 V). Indeed, the inverter module is composed of a logical section (FPGA device), with a power supply of 3.3 V, and a power section that provides the ±300 V output voltage. A load current operating point of 10 A has been imposed, that means a current of 5 A in each module for the two-inverters system.
To take into account crystal oscillator tolerance or possible non-perfect synchronization in the switch on of the inverters, which could lead to the generation of circulating currents, different phase and frequency clocks have been considered. As an example, in the two parallel-connected inverters system depicted in
Figure 3, the clock of the first inverter was imposed to 100 MHz, while in the second inverter a clock frequency 0.1% greater and a 5 ns clock phase delay were forced. Crystal oscillator datasheets that are generally used in FPGA applications are reported in [
39,
40]. The frequency variation estimated is around 10 ppm and 100 ppm. Hence, to demonstrate the validity of the approach and to take into account the ageing of the crystal oscillator, a tolerance of 1000 ppm (corresponding to 0.1%) has been considered.
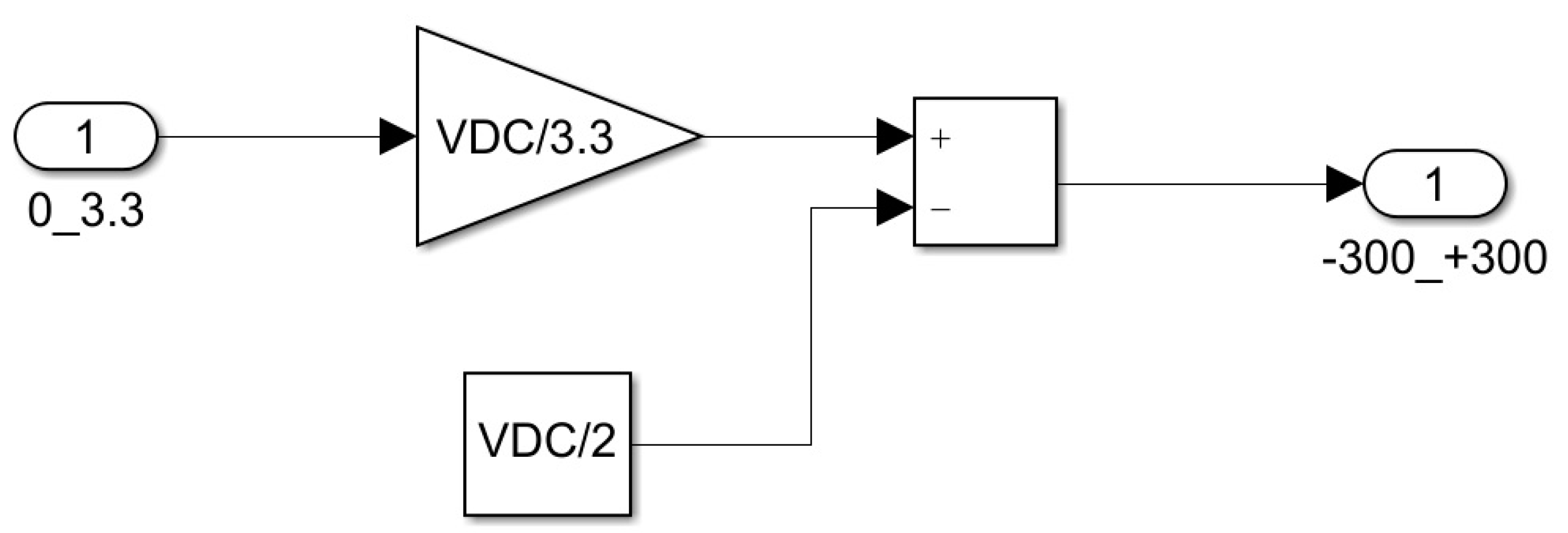
In
Figure 4, the subsystems BRIDGE is presented. All the subsystems deployed in the main model-based schematic with the same function are perfectly identical.
The subsystem BRIDGE aims to convert the FPGA-output control signals into power system signals. In this paper, the internal architecture of the inverter has not been studied because the effort has been concentrated on its control regardless of its internal structure. The Simulink model represents the BRIDGE inverter controlled by a 0–3.3 V signal. The low-pass filter, employed to convert the square wave into the output sine wave, which is normally required after the inverter, has not been considered, since it does not affect the simulation results.
VDC is the constant DC-link equal to 600 V. The conversion is achieved with the simple Equation (6):
where
Vout is the output voltage of the BRIDGE and
VDC is the voltage of the system DC-link, both expressed in Volt.
The FPGA subsystem includes the model-based design of the proposed new control method that is described in detail in the following paragraph.
2.3. The Proposed Control Method
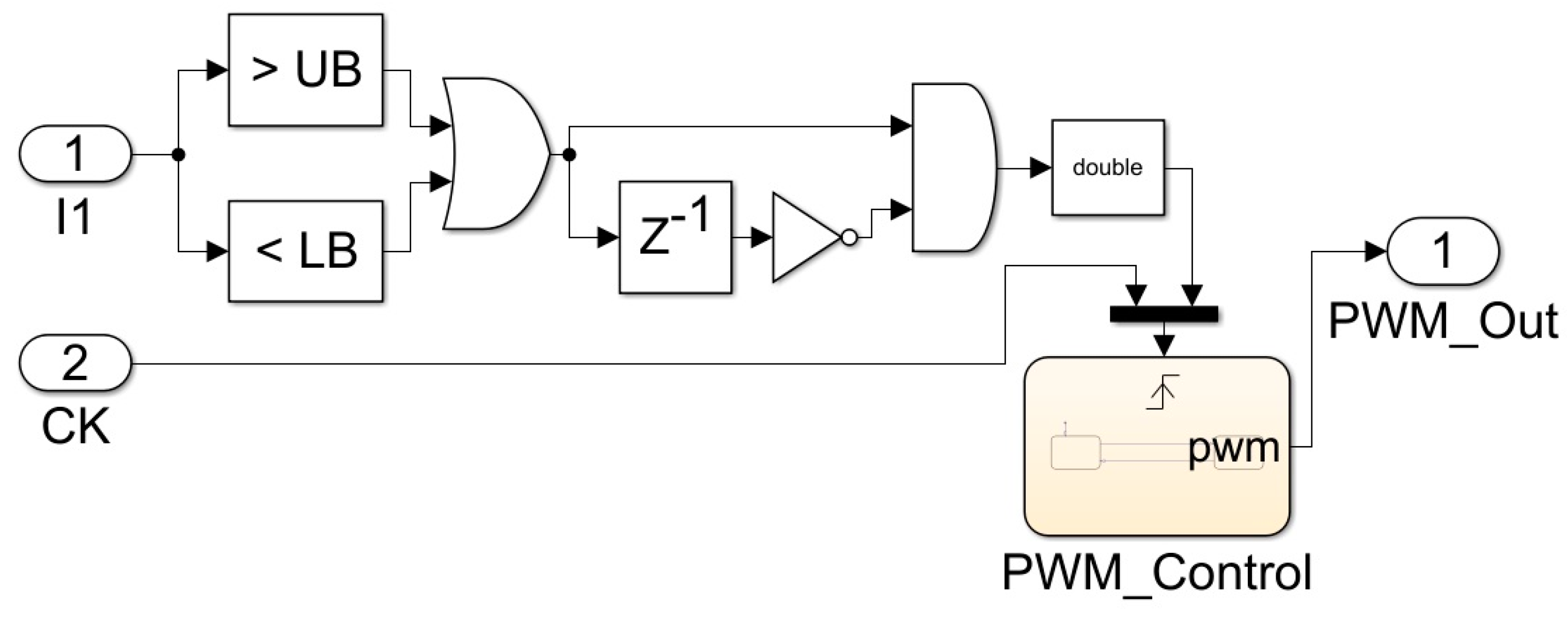
In
Figure 5, the subsystem FPGA is represented. As shown in
Figure 3, the measured output current has been used to control the PWM generation. For this purpose, two comparators have been instantiated on the FPGA subsystem.
When the output current oversteps the limits imposed by the comparators, the proposed control method sends a reset signal to synchronize the FSM that generates the PWM. The comparators must set up in order to limit the current in the Upper Bound (
UB) and Lower Bound (
LB). The lower bound is calculated as the minimum value of the load current (
I0) divided by the number of the inverters (
N). The upper bound is calculated as the lower bound plus the difference of the maximum and minimum load current divided by the number of inverters, as shown in (7) and (8).
The minimum current value (min(I0)) is the value of the initial simulation conditions: in this case it is 10 A. Meanwhile, the maximum current value (max(I0)) can be expressed as the value of the initial conditions plus the current excursion on the load.
These bounds are fixed to respect the normal behavior of the load current. In the setting of the comparators, their precision has been considered, estimating it as 10 mA. UB and LB have been rounded to the second decimal place to respect the precision of the comparators: the UB has been rounded down and the LB has been rounded up to consider a margin in respect to the maximum and minimum values. Due to the approximation, an increase in the PWM frequency can be seen because lower excursion of the current means higher oscillating frequency.
To better understand this control, a two parallel-connected inverters system has been simulated with a current operating point of 10 A on the load, which means an output current of 5 A for each inverter. In normal behavior, the load current starts from 10 A and increases until 13 A, and then returns to 10 A, forming a triangle waveform (because of the input square wave) respecting the PWM period. Specifically, when the PWM is in the high logical state, the current increases, and when the PWM is in the low logical state, the current decreases. This means that each inverter has an increase of 1.5 A from the initial operating point and the comparators should be set up at 5.01 A for the lower bound and at 6.49 A for the upper bound.
In
Table 1, the configurations of the comparators for a number of parallel inverters ranging from 2 to 6 are reported.
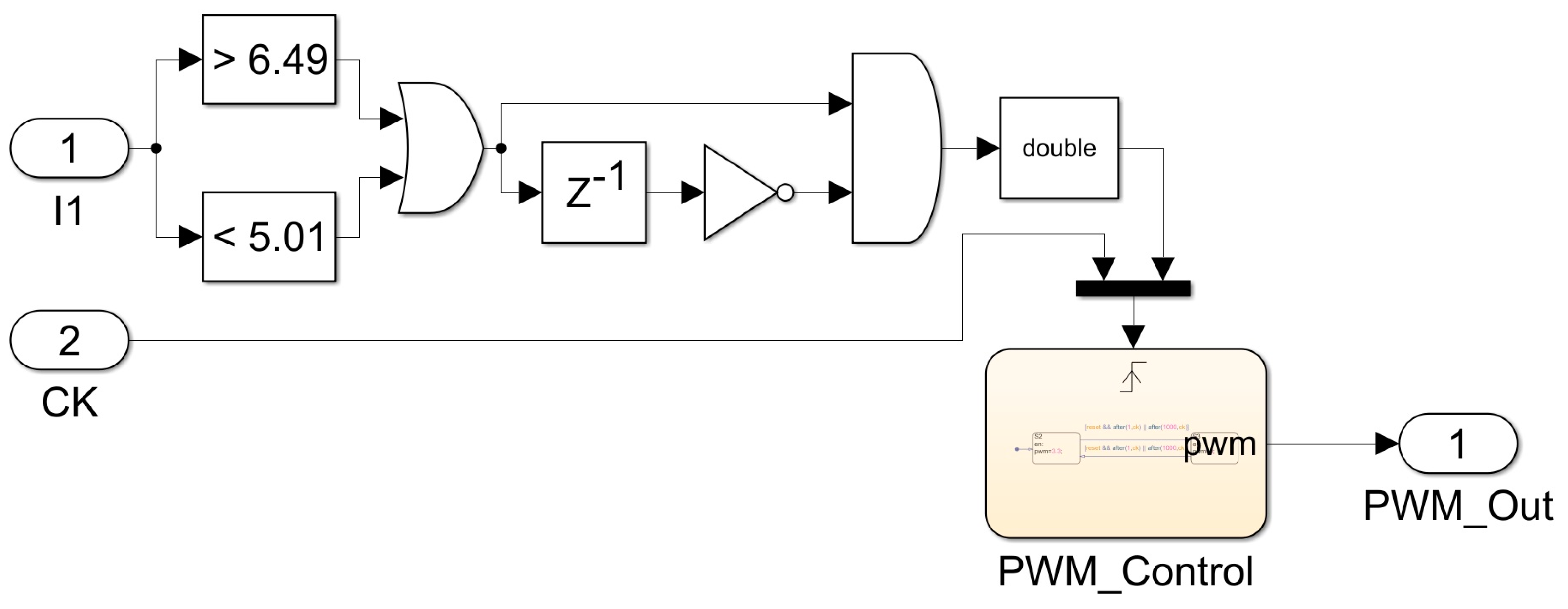
In
Figure 6, the proposed control method is shown, and the model-based design, with the value of UB and LB related to the case of a system with two parallel-connected inverters (5.01 A and 6.49 A, respectively), is described.
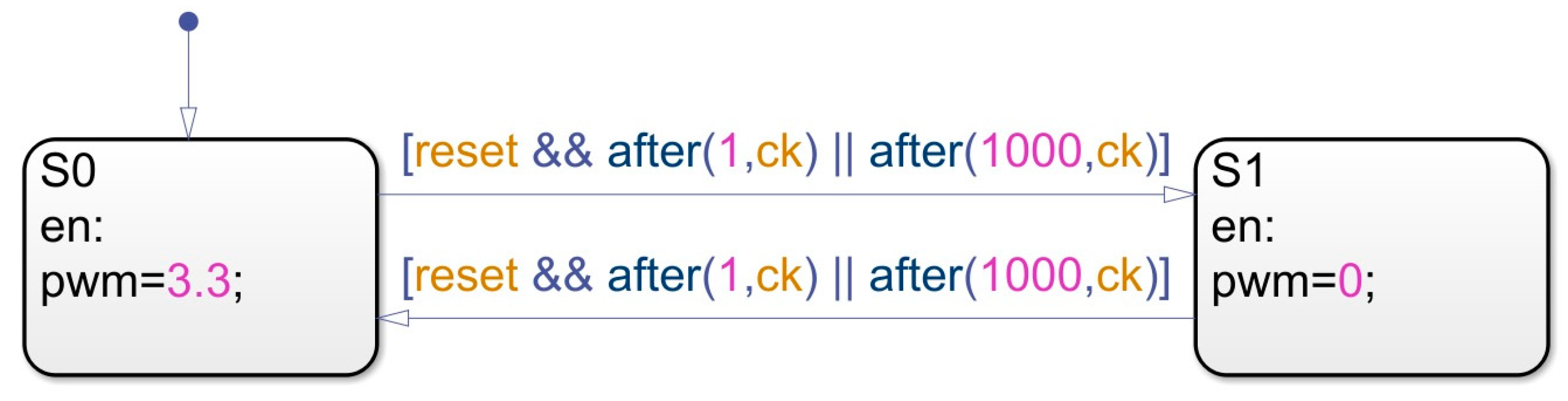
The FSM shown in
Figure 7 has been used to generate the output PWM signal in the FPGA subsystem. In each inverter, the same FSM has been instanced. As shown in
Figure 1, the designed inverter module is composed of the FPGA (low-power and logical part) which, through our algorithm, controls the power part (the BRIDGE). The algorithm is instanced in the FPGA, supplied with a voltage of 3.3 V, therefore, the two states correspond to the high logical level of 3.3 V in state S0 and to the low logical level 0 V in state S1. The transitions are governed by the external reset (bounds above mentioned) or by a fixed time, i.e., 10 μs (1000 clock rising edges), the PWM goes from the high logical level to the low logical level and vice versa, so the PWM with a frequency of 50 kHz is generated. Summarizing, a transition is executed if the FSM receives a reset signal or if 1000 clock cycles have passed.
The FSM default transition has been settled to the state S0, so the PWM starts always from the high logical level. The transitions with the reset signal are allowed only after one clock rising edge to prevent oscillations in the PWM change of state.
It is worth stressing that the proposed control method does not require an intercommunication line among the inverters; indeed, every inverter is equipped with an FPGA device with the described logic that controls only its own inverter.
3. Results and Discussion
To evaluate the control method, simulations of the model described in Simulink have been carried out. Firstly, the system with two inverters was tested; subsequently the algorithm has been revised to be used also on systems with a number N of inverters. In every simulation, circulating current, inverters output currents and PWM signals have been analyzed.
Table 2 shows the configuration for each inverter module used in the tests and, specifically, the clock frequency and the clock delay with respect the first inverter. As mentioned before, the frequency and the phase delay of the clock signals are not identical in every FPGA. The clock frequency of the first inverter has been taken as the reference, while the phase delay of the other inverters has been settled randomly with a delay between 1 ns and 5 ns.
In
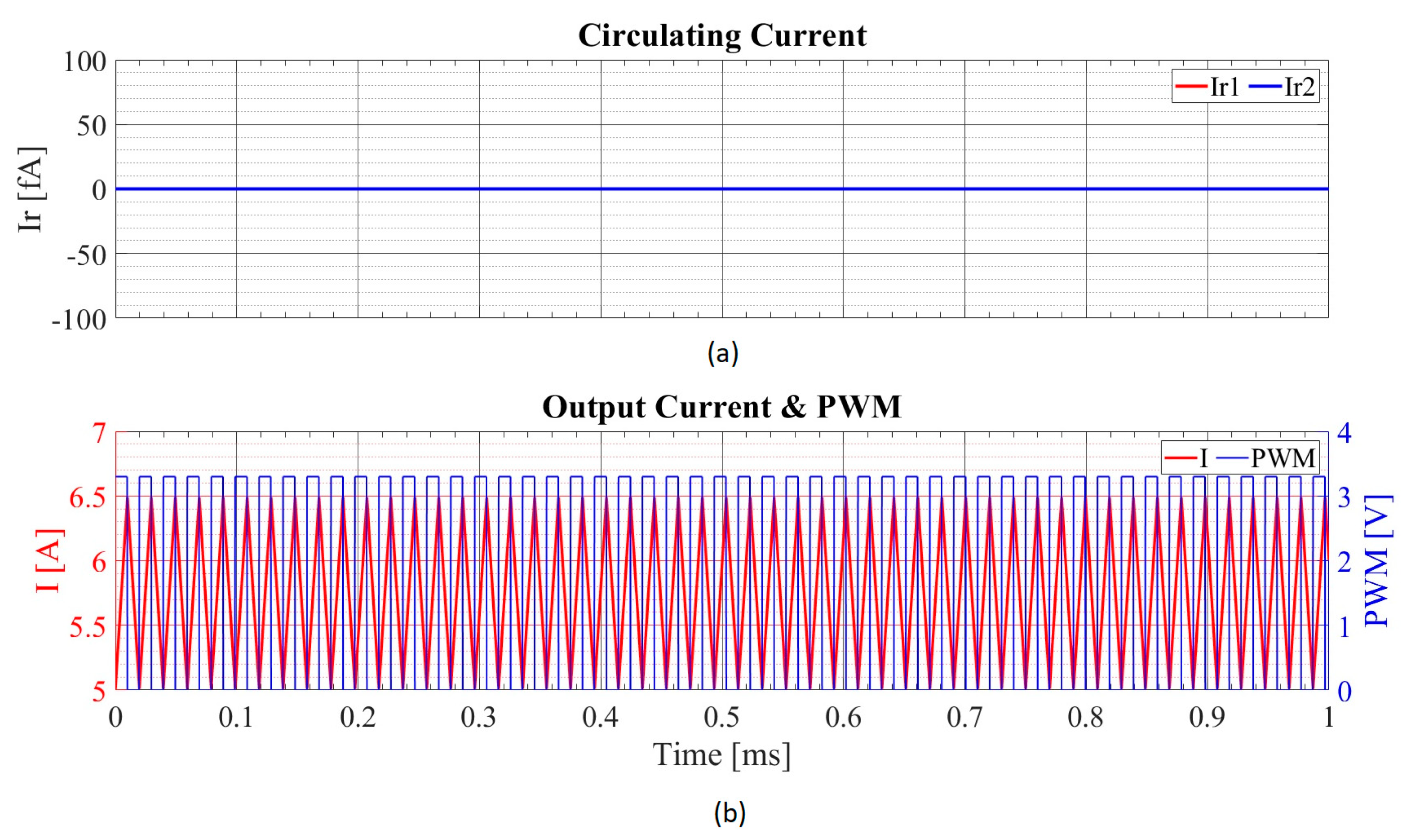
Figure 8, the results of the simulations conducted with two parallel-connected inverters are reported: the trend over time of the circulating current, the PWM and the output current for each inverter are shown.
The graph reported in
Figure 8a shows that the circulating current seen by the first inverter and the circulating current seen by the second inverter are equal to zero, confirming the quality of the proposed algorithm. Moreover, the PWM (drawn in blue) and the output current (drawn in red) are shown in
Figure 8b. The PWM frequency is 50.668 kHz, a little higher with respect to the target frequency of 50 kHz due to the approximation and sensitivity of the comparators. The output currents are identical: they oscillate from 5.01 A to 6.49 A with a triangle waveform.
The configurations of the inverters used in the tests are the same shown in
Table 2: the clock of the FPGA that controls the first inverter has been set up to 100 MHz with an initial current operating point of 5 A. The clock of the second has been set 0.1% higher than the first, precisely at 100.1 MHz with a phase delay of 5 ns. The initial current operating point has been set at 5 A for the second inverter; so on the load, the initial current operating point was at 10 A. The comparator settings are those reported in
Table 1.
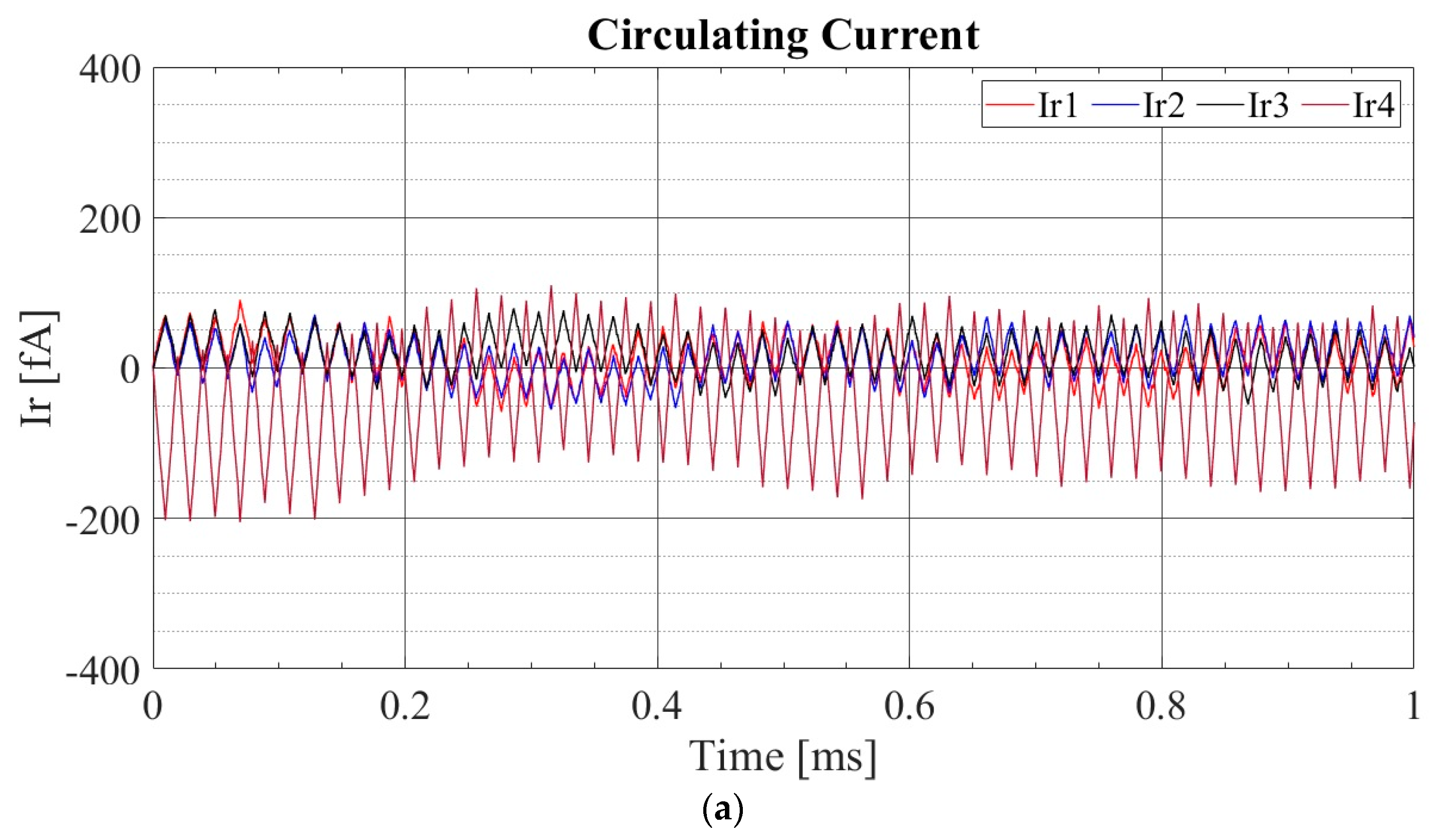
Subsequent tests are aimed at verifying whether the proposed method was applicable to a more general solution with N inverters. In
Figure 9, circulating currents are reported with four and six inverters, respectively. In the case of the four inverters,
Figure 9a, the initial condition of the load current has been set to 10 A, as described for the previous case. This current is equally distributed among the inverters (each inverter has an initial output current of 2.5 A). The amplitude of the circulating current is reduced to a few tens of femtoampere (fA) and the output current of each inverter is now reduced due to the greater number of inverters. The PWM frequency was considered 51.365 kHz, slightly greater than the setpoint (50 kHz). This error is caused by the precision of the comparators (estimated to 10 mA) as described before.
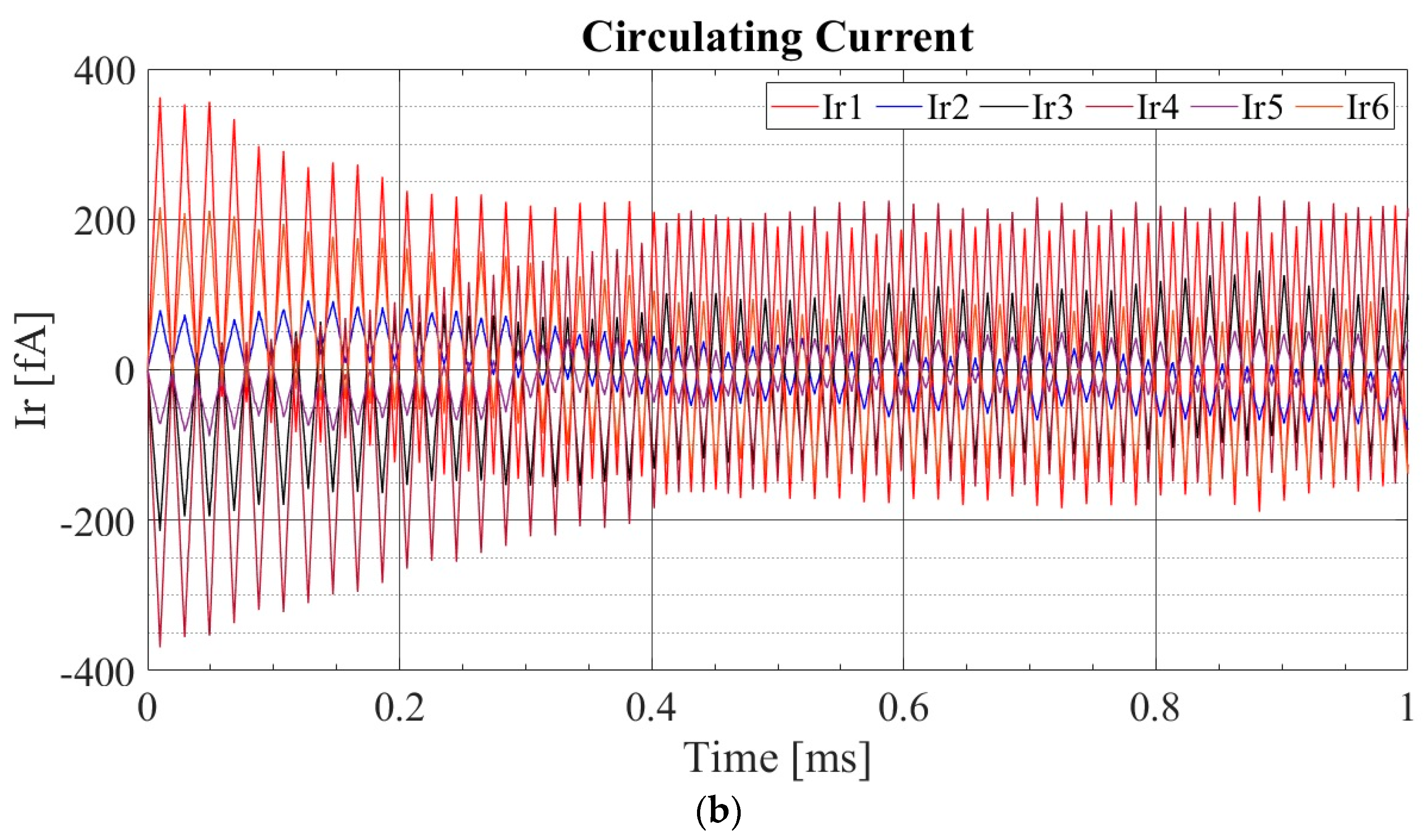
The waveforms represented in
Figure 9b show the behavior of the circulating current in a system with six parallel-connected inverters. The circulating current remains in the range of the fA with a higher peak of 362 fA and a lower peak of −369 fA. The frequency of the PWM signal has been measured around 51.017 kHz for each simulation. As in the case of the two parallel inverters, the inverters’ parameters are those shown in
Table 2 with comparators settings (UB and LB) shown in
Table 1. Other configurations have been simulated and, in
Table 3, results are reported. In particular, PWM frequency, the mean RMS value of the circulating current and the percent variation of the PWM frequency with respect to the target frequency for every system simulated, are shown.
A maximum frequency variation of 3.44% has been observed, obtained in the simulation with five parallel-connected inverters. Different results in frequency variations can be explained, considering that the comparators are configured by calculating the maximum and the minimum current values by dividing the total load current by the total number of parallel-connected inverters. In some cases, LB and UB (Equations (7) and (8)) must be approximated according to the values shown in
Table 1 due to the precision of the comparators. These approximations can negatively affect the control accuracy by generating small differences in the PWM frequency.
Moreover, in
Table 3, the residual circulating current after the application of the control is shown. The proposed control method is optimal in a two parallel-connected inverters system, as
Figure 8 shows. The circulating current in that situation is equal to zero. Focusing on the other simulations, the circulating currents are not linearly dependent on the number of inverters connected to the system. There is no decrease in the circulating current due to a greater number of inverters, as shown in [
26]. The reason is that the proposed control method reduces the circulating current by generating the PWM with the reset signals provided by the comparators. As explained in the previous paragraph, the approximations of Equations (7) and (8) can be strong, as in the four and six inverters case (higher circulating current), or weak, as in the case with three or five parallel-connected inverters (lower circulating current).
4. Conclusions
In this paper, a new control method for parallel-connected inverter systems has been presented and discussed.
The proposed method has been designed in a model-based fashion and simulated in a Simulink environment. The model is designed to be implemented on an FPGA, through a HDL coder—this technique allows one to reduce time to market and improve flexibility.
Each FPGA controls its inverter, a transmission line modelled as an impedance and the load, and the same circuit is instantiated on all system devices, enhancing modularity and scalability. Since a little phase delay or difference in the clock causes delays in the control response that generates the circulating current, a non-ideal clock for the FPGAs has been considered, and, in particular, a displacement from the nominal frequency of 0.1% has been simulated.
The simulations performed with a different number of inverters in parallel (up to six) demonstrate the ability of the control designed to reduce the circulating current and so reduce the risk of inverter damage. These results have been obtained without the necessity of any communication among the inverters that cooperate autonomously, each providing the same output current, unlike other authors that achieved the system control or the load sharing using communications lines or wireless communication among the inverters [
34,
35]. It has been demonstrated that the circulating current can be negligible in a system equipped with this control method, especially in a system with two parallel-connected inverters where the circulating current is equal to zero. Furthermore, when system control in a steady-state condition has been achieved with a modular and redundant structure, then, new inverters can be added without intervening on other parts of the system.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}