
Smart Sensors System Based on Smartphones and Methodology for 3D Modelling in Shallow Water Scenarios





Abstract
:1. Introduction
1.1. Literature Review
1.2. Aim of the Paper
- Tests to determine the accuracy and precision of shallow-water depth measurement and planimetric positioning of Deeper Smart Sonar (particularly CHIRP+ and Pro+ 2), implementation and evaluation of a system to synchronise the Deeper Smart Sonars with an external GNSS receiver via smartphone to improve the GNSS Single Point Positioning (SPP) performance in real-time, and a method to correct the GNSS positioning of the Deeper Smart Sonar in Post-Processed Kinematic (PPK) based on a spacetime approach and on the GPS Time (GPST) to further optimise positioning performance;
- Building 3D mesh models of the environments surveyed with the Deeper Smart Sonar.
2. Materials and Methods
2.1. Research Methodology
- Vg: value of the point to be estimated at the x and y coordinates of the grid;
- vi: value of the i-th observed point;
- n: number of points close to the point to be interpolated;
- di: distance of the i-th point from the point to be interpolated;
- P: a positive parameter representing power.
- N(d): set of pairs of measured points;
- |N(d)|: number of distinct pairs in N(d);
- d: separation vector between points;
- |d|: equal to ui-uj;
- V(ui): value of the random variable to describe the possible outcomes of the measured quantity V in the spatial location ui;
- V(uj): value of the random variable to describe the possible outcomes of the quantity V in the spatial location uj.
- : normal to the surface of point p;
- : smoothing filter.
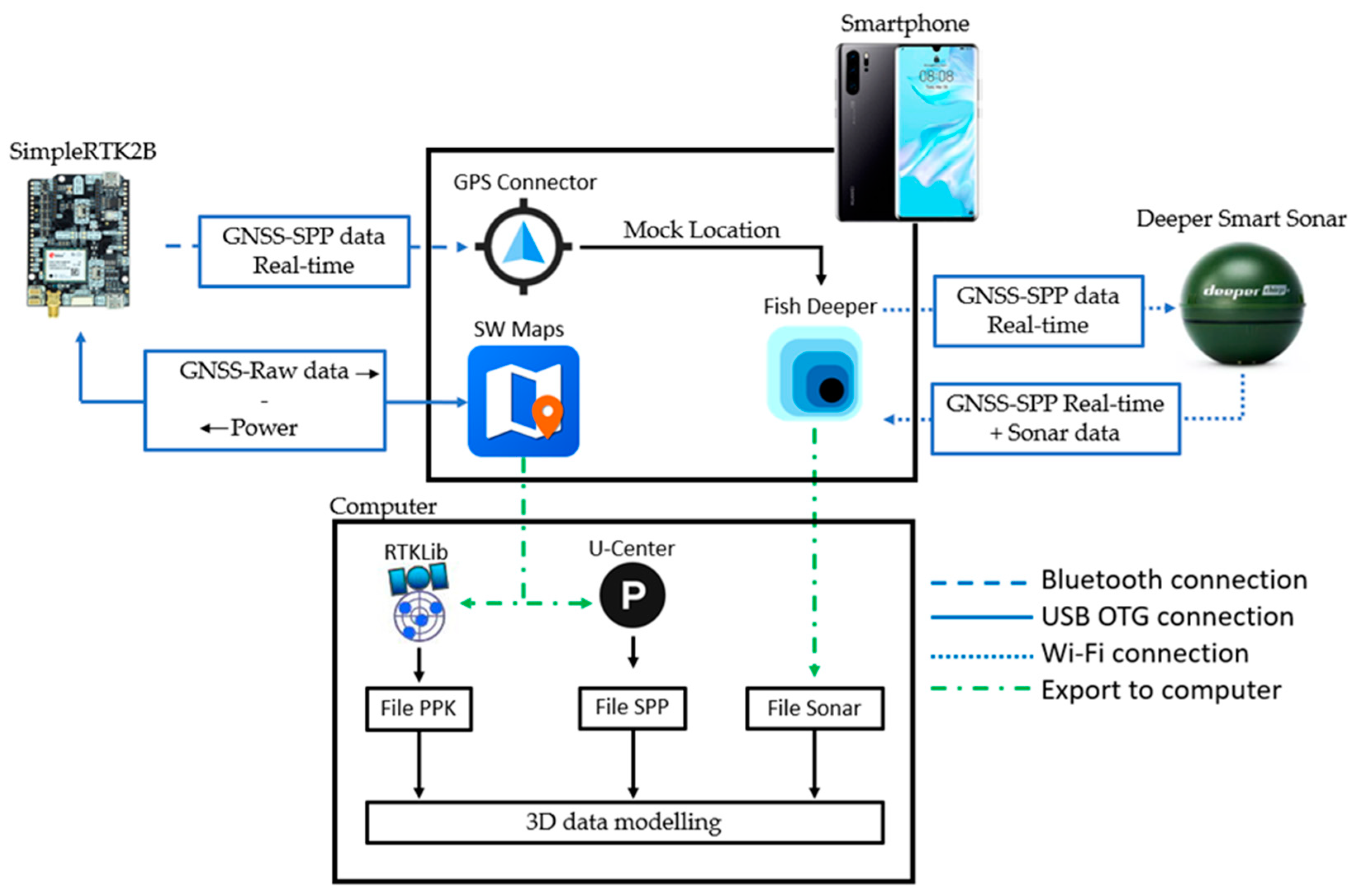
2.2. GNSS > Sonar > Phone System Implementation
2.2.1. Devices and Apps
2.2.2. Connection Management and App Data Transfer
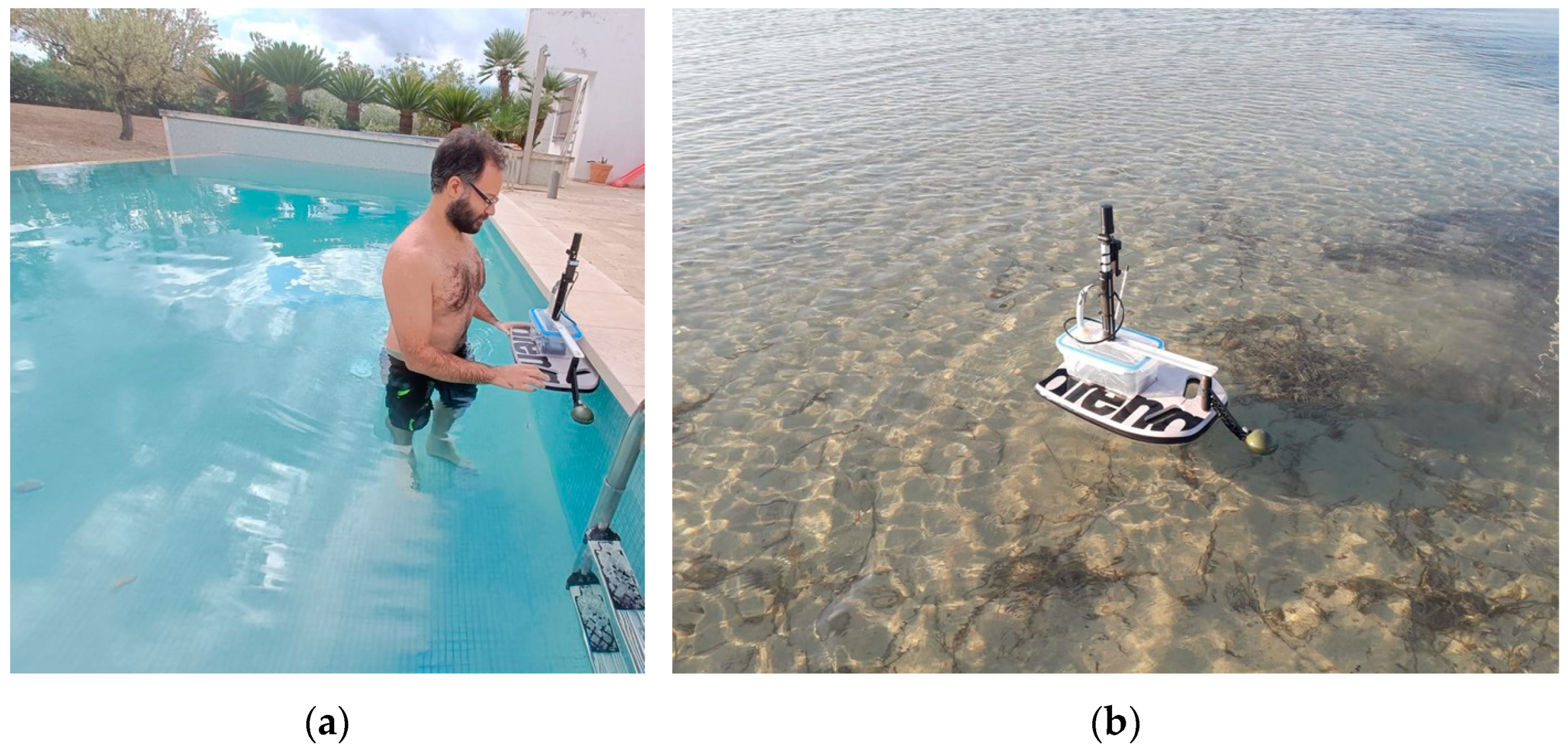
2.3. Tests and Datasets Creation
2.3.1. Static Datasets
2.3.2. Dynamic Datasets
2.3.3. Water Depth Datasets
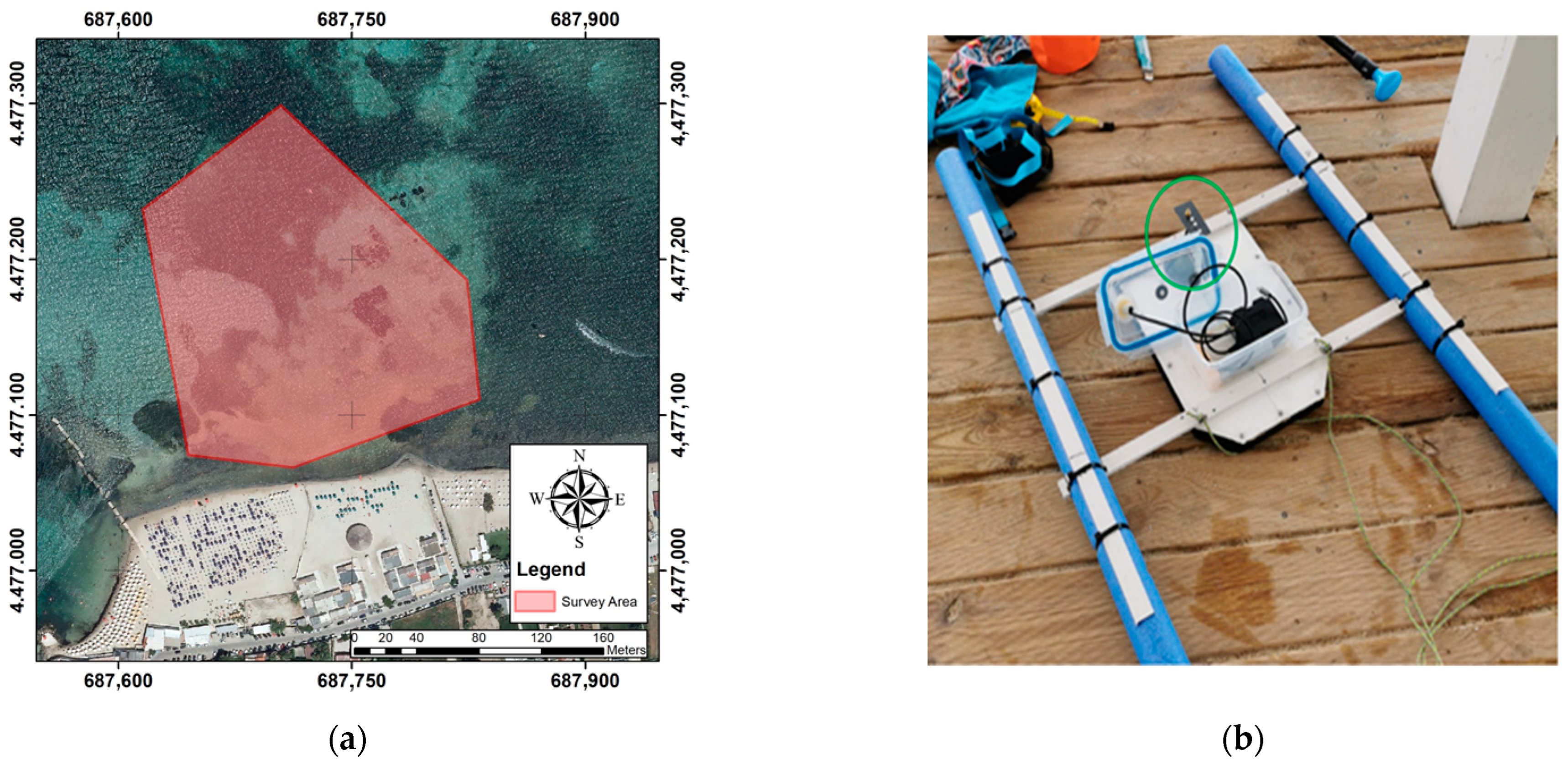
2.3.4. Building of the Datasets for 3D Modelling
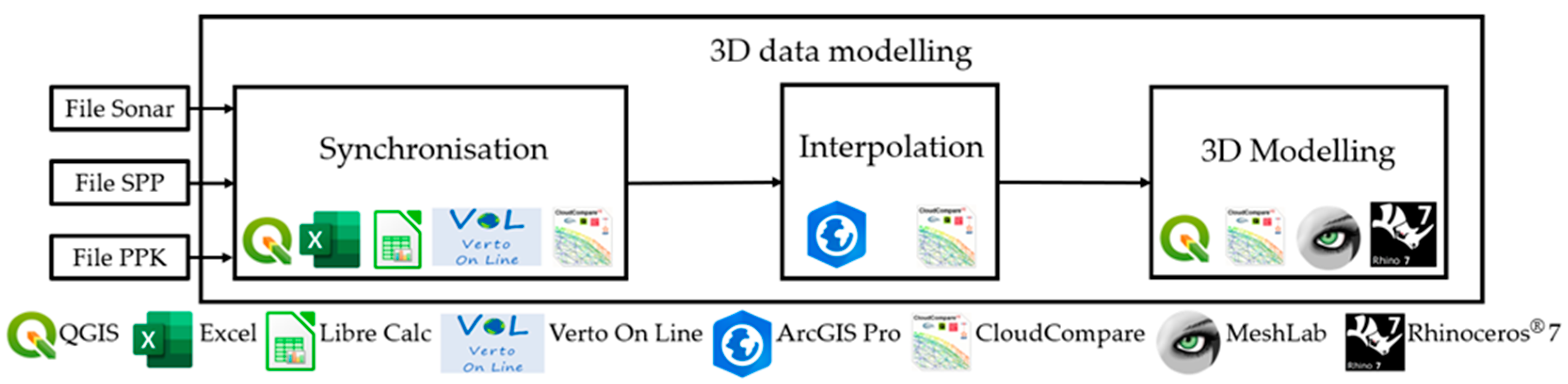
2.4. 3D Data Modelling
2.4.1. Synchronisation
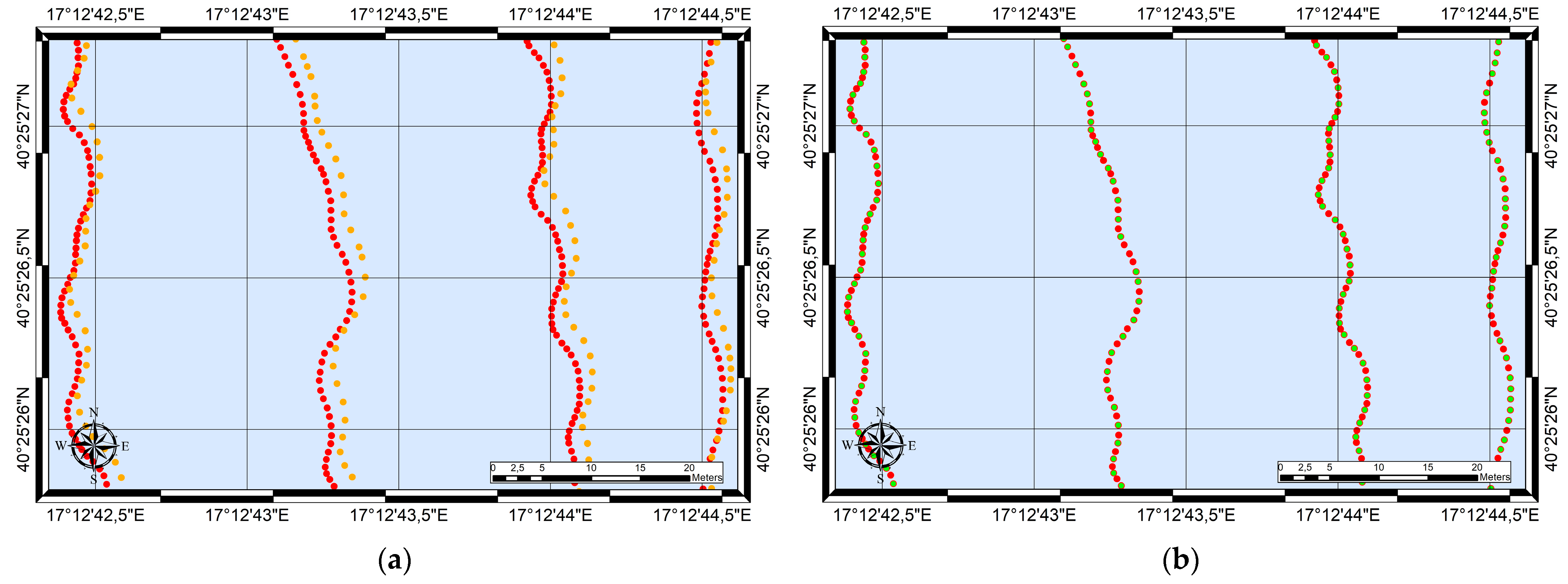
- The File Sonar was synchronised with the File SPP via the latitude and longitude fields, the new file was named “File Sonar + SPP” (through this synchronisation, the File Sonar was associated with the GPS Time value of the system);
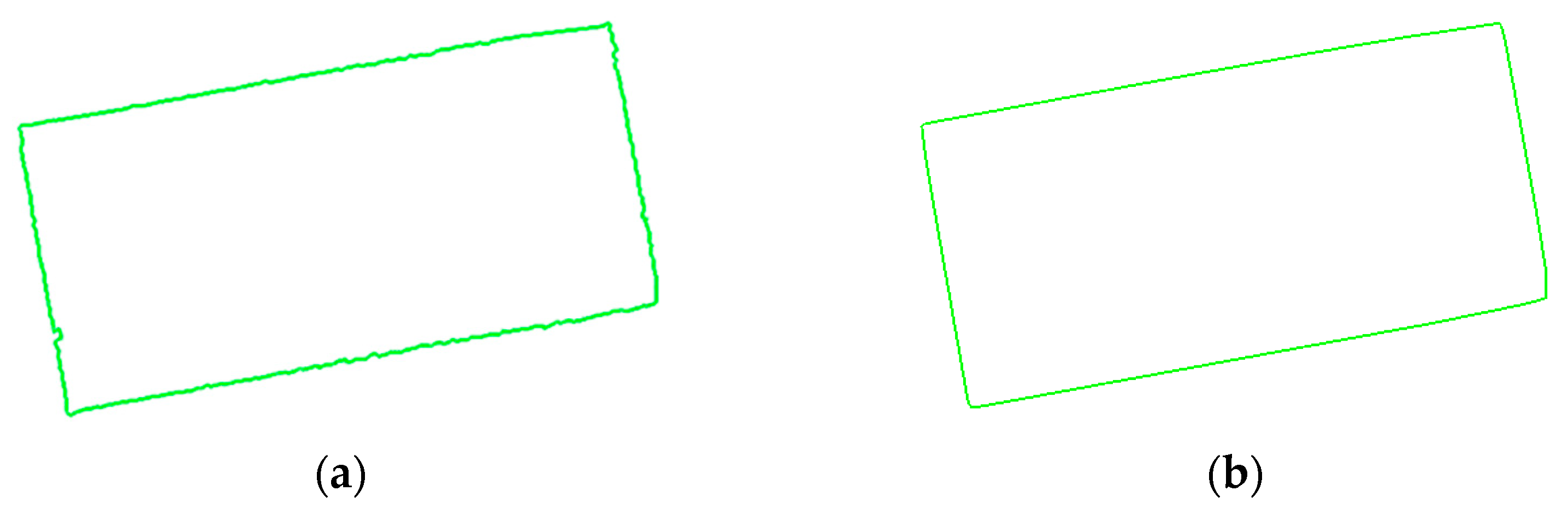
- The File Sonar + SPP was synchronised with the File PPK via the common GPS Time field. Figure 5a shows a detail of the pre-synchronisation File Sonar + SPP in orange and the File PPK in red. The new file produced was called “File Sonar + SPP + PPK” and contained the information on latitude, longitude and ellipsoid height corrected to PPK, depth of water and time of point acquisition. Figure 5b shows a comparison between the File Sonar + SPP + PPK in green and the File PPK in red.
- Correction of the offset between the GNSS antenna and sonar transducer;
- Correction of the offset between the sonar transducer and keel line;
- Selection of the vertical reference system, for example, tidal observations (Mean Sea Level—MSL, Lowest Astronomical Tide—LAT, etc.), physical model (geoid) or reference ellipsoid [17];
- Correction of the water level variations.
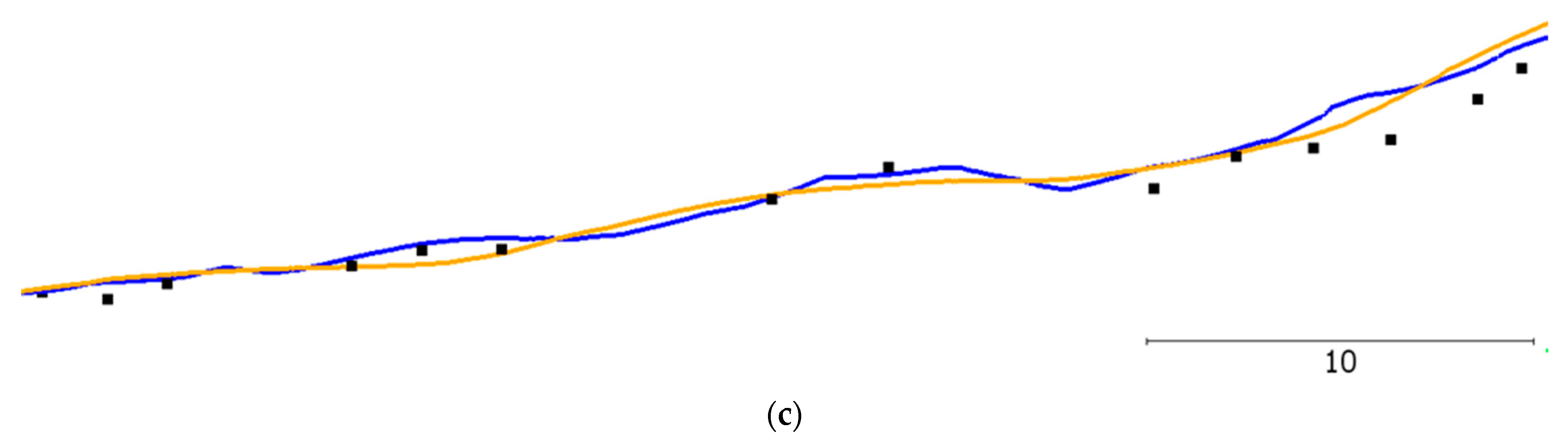
2.4.2. Interpolation
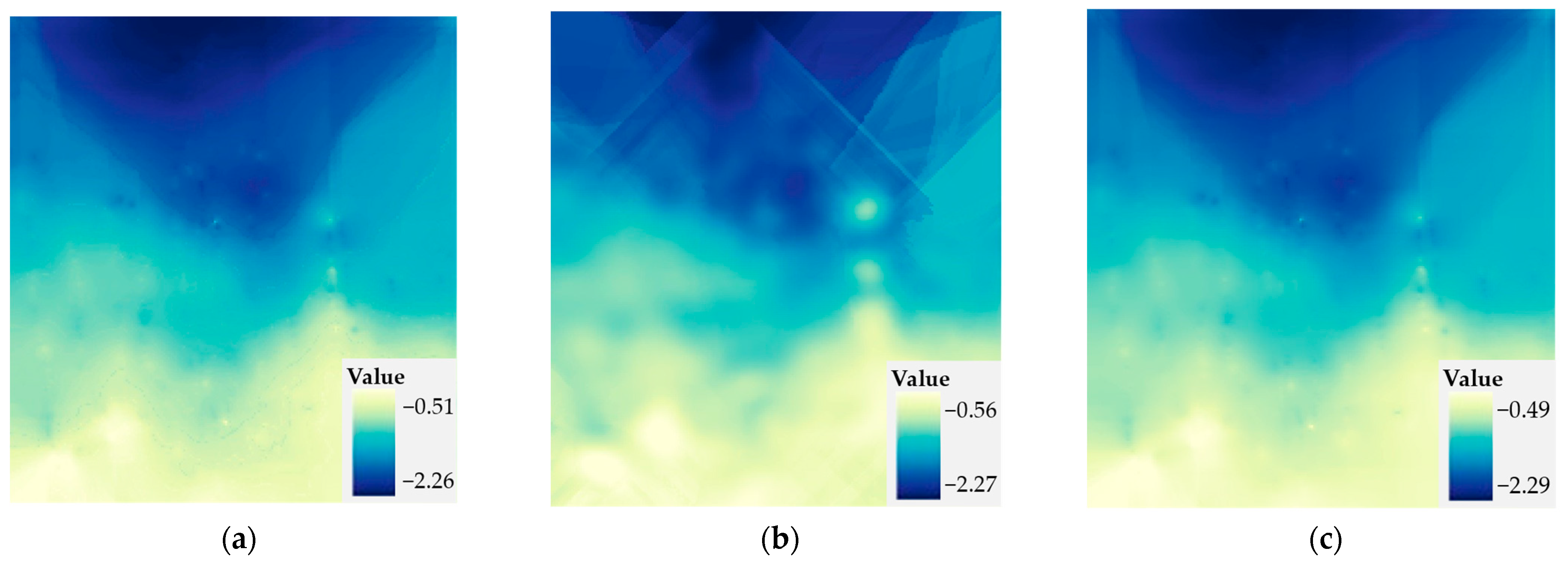
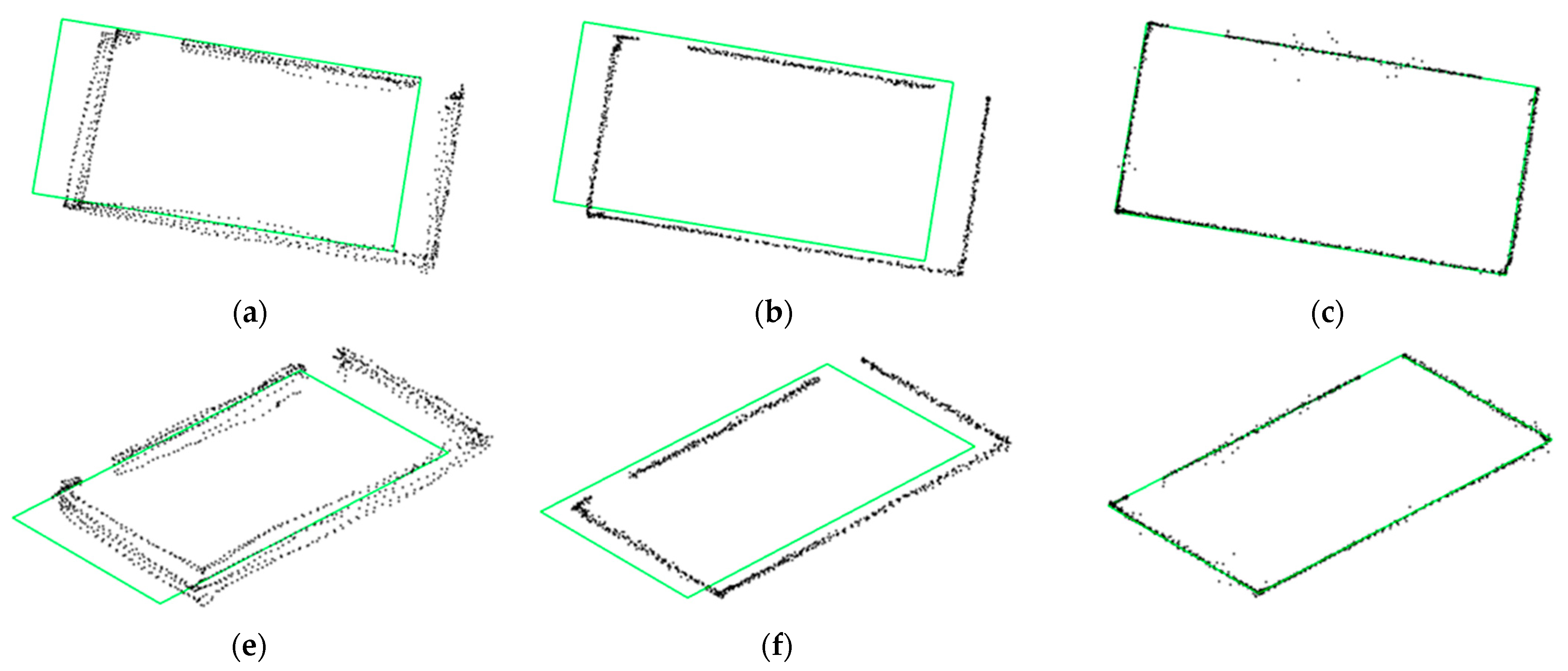
- Parameter definition and creation of a first bathymetric grid interpolated using the IDW method (Figure 6c);
- Definition of the training features for the Forest-based Classification and Regression method;
- Training, algorithm running and producing the final bathymetric grid interpolated by Forest-based Classification and Regression method (grid FCR).
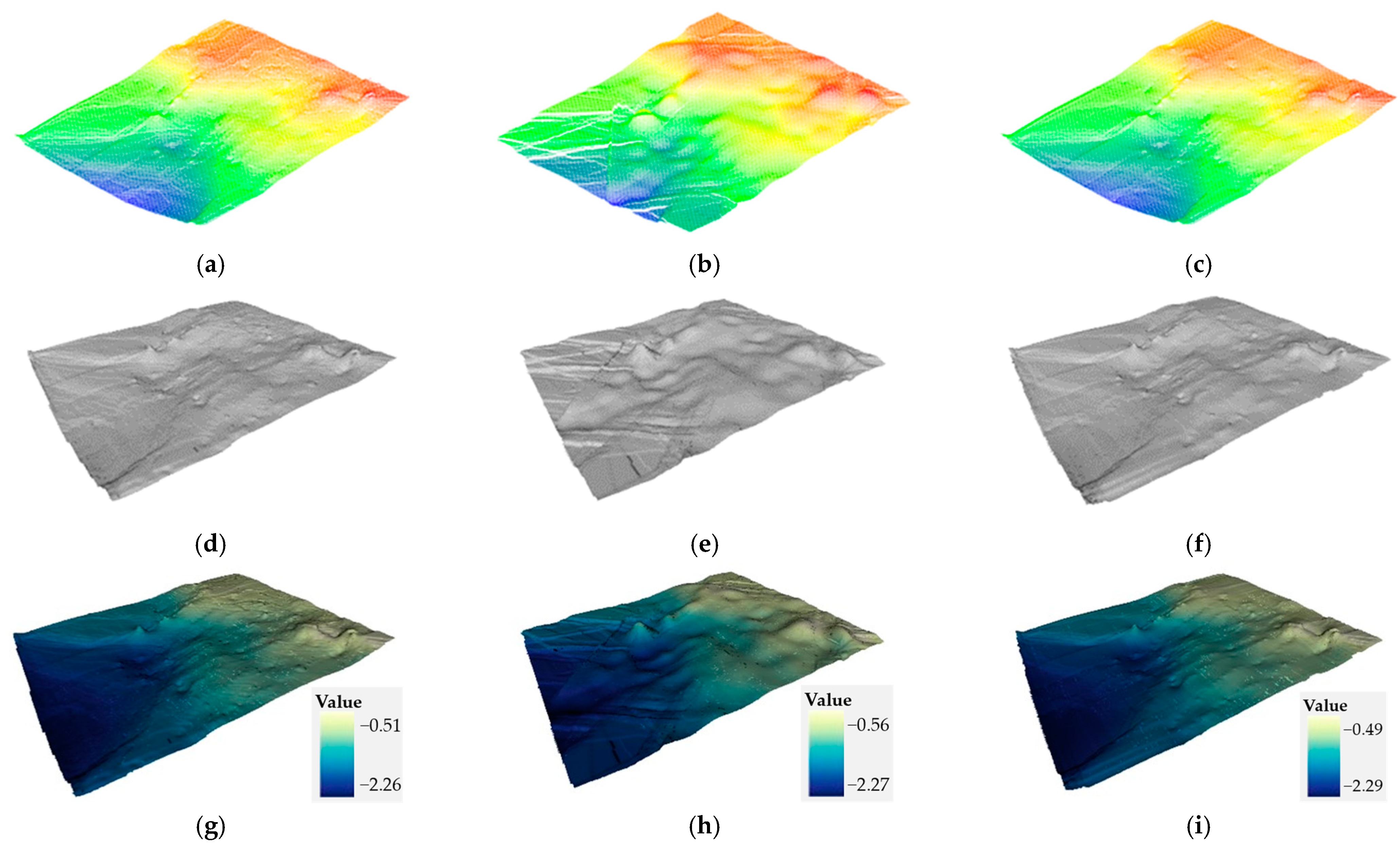
2.4.3. 3D Modelling of Natural Surface
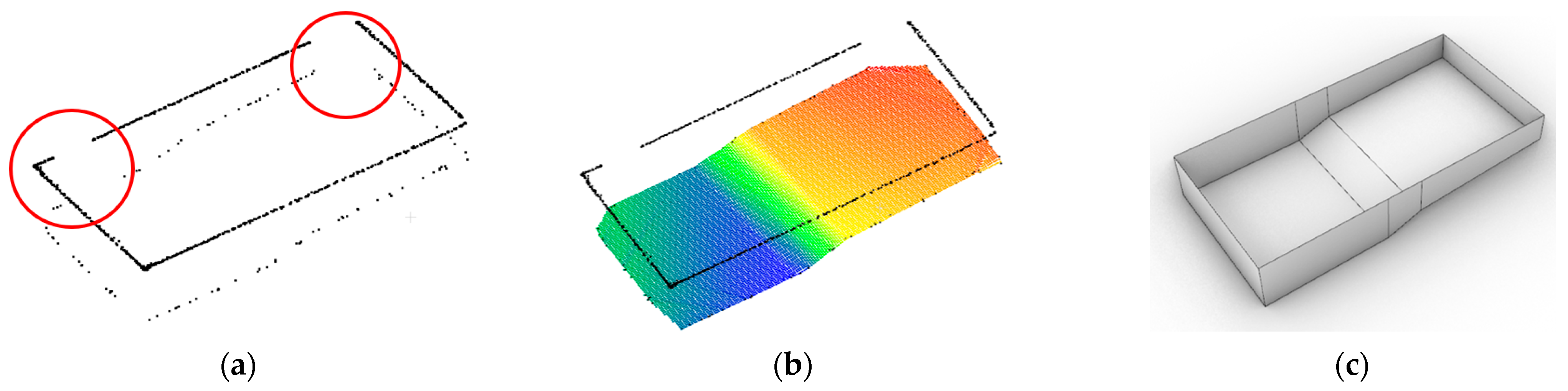
2.4.4. 3D Modelling of Artificial Structure
3. Results
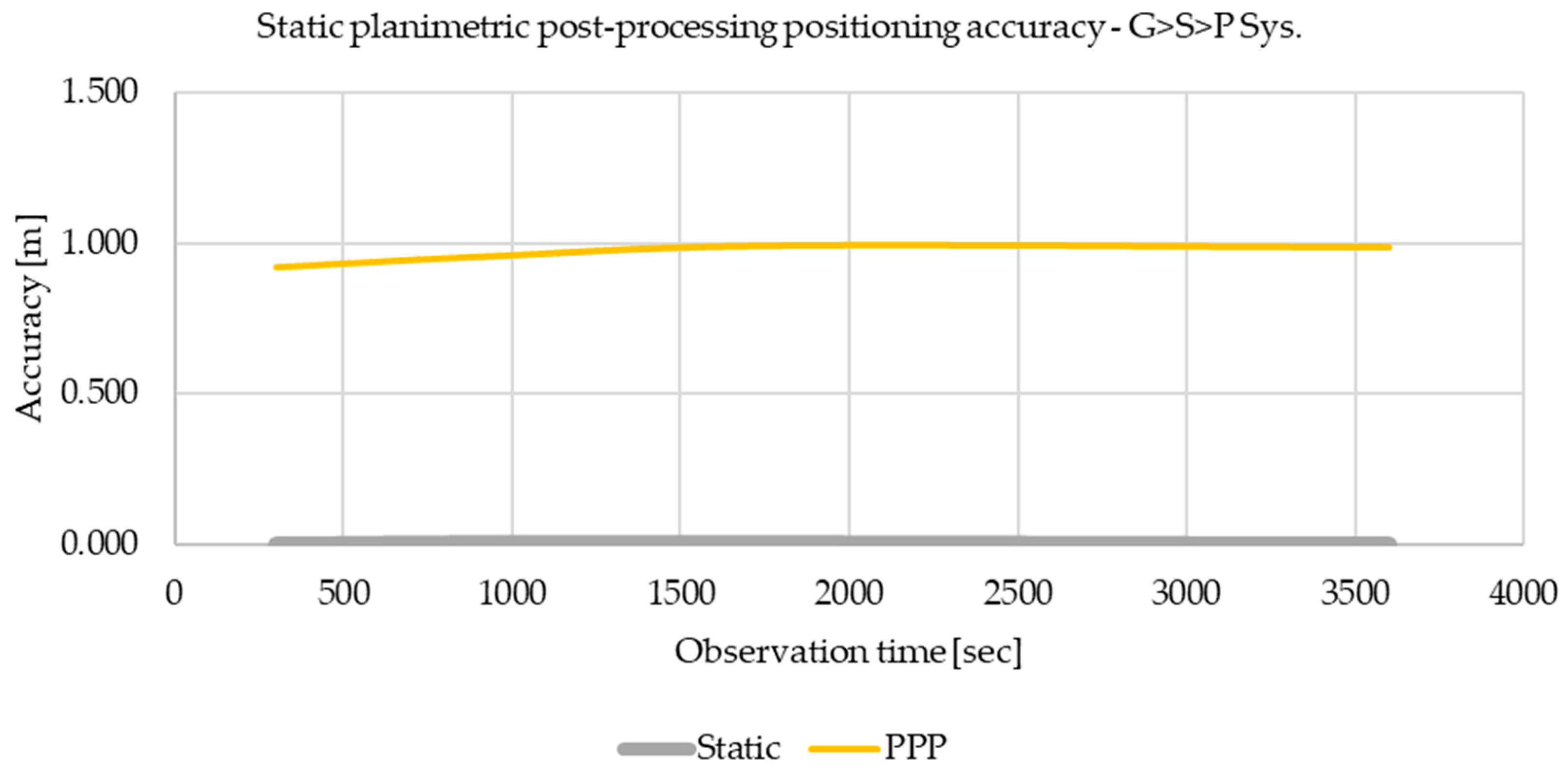
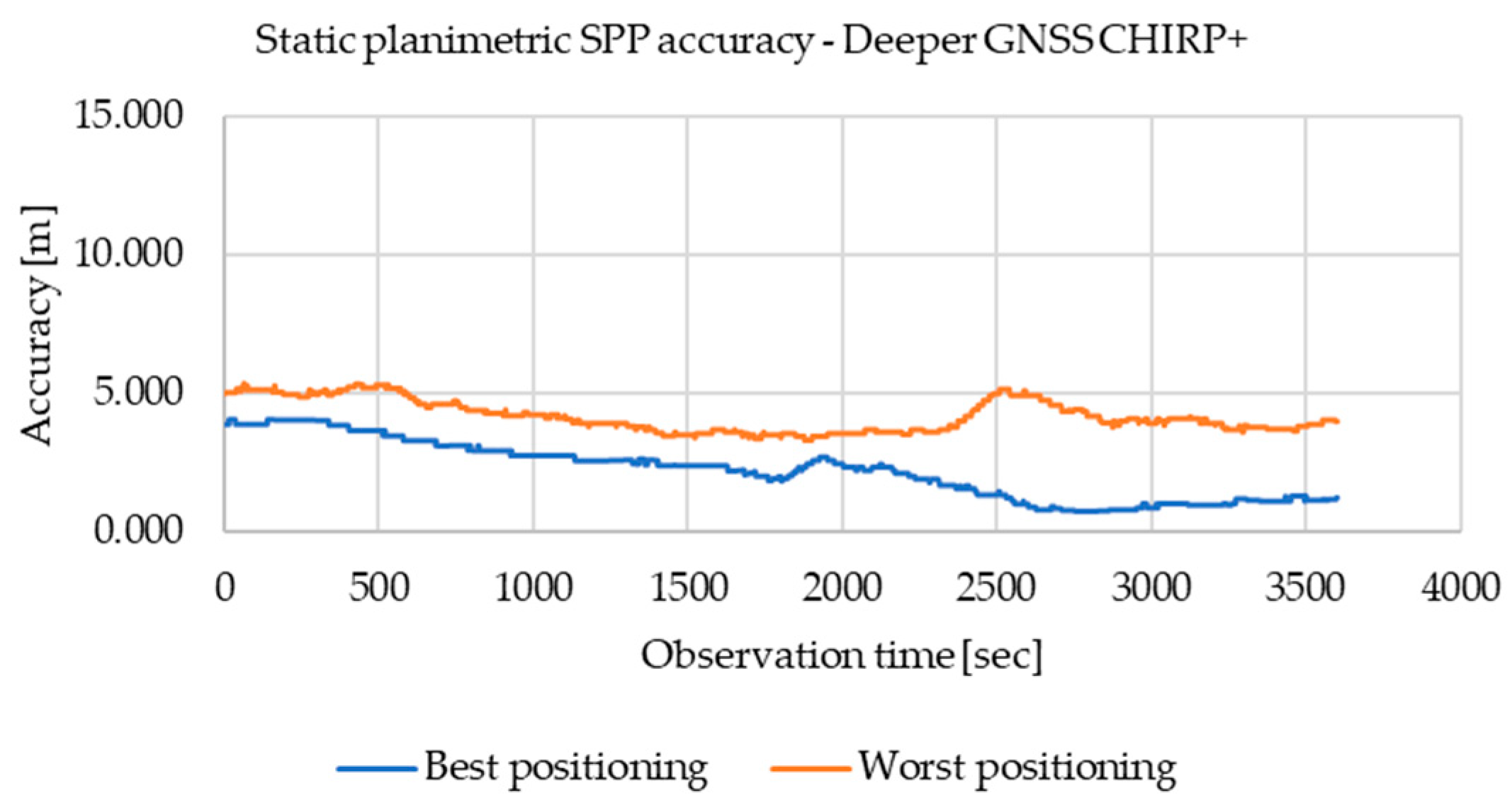
3.1. GNSS Positioning Test Results
3.2. Depth Survey and 3D Modelling Test Results
4. Discussion
5. Conclusions
- Evaluation via analytical tests of the performance of the Deeper Smart Sonars CHIRP+ and Pro+ 2 in surveys conducted in shallow water;
- Development and experimentation of a system to synchronise the Deeper Smart Sonars with an external GNSS receiver via smartphone to improve sonar geolocation in real-time and post-processing;
- Experimentation of a mapping method based on an ML approach;
- Implementation of a pipeline for 3D modelling of underwater natural surfaces and artificial structures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A







References
- Cormier, R.; Elliott, M. SMART Marine Goals, Targets and Management—Is SDG 14 Operational or Aspirational, Is ‘Life Below Water’ Sinking or Swimming? Mar. Pollut. Bull. 2017, 123, 28–33. [Google Scholar] [CrossRef] [PubMed]
- Ryabinin, V.; Barbière, J.; Haugan, P.; Kullenberg, G.; Smith, N.; McLean, C.; Troisi, A.; Fischer, A.; Aricò, S.; Aarup, T.; et al. The UN Decade of Ocean Science for Sustainable Development. Front. Mar. Sci. 2019, 6, 10. [Google Scholar] [CrossRef]
- Helminen, J.; Linnansaari, T.; Bruce, M.; Dolson-Edge, R.; Curry, R.A. Accuracy and Precision of Low-Cost Echosounder and Automated Data Processing Software for Habitat Mapping in a Large River. Diversity 2019, 11, 116. [Google Scholar] [CrossRef]
- Tonion, F.; Pirotti, F.; Faina, G.; Paltrinieri, D. A MACHINE LEARNING APPROACH TO MULTISPECTRAL SATELLITE DERIVED BATHYMETRY. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 3, 565–570. [Google Scholar] [CrossRef]
- Bio, A.; Gonçalves, J.A.; Magalhães, A.; Pinheiro, J.; Bastos, L. Combining Low-Cost Sonar and High-Precision Global Navigation Satellite System for Shallow Water Bathymetry. Estuaries Coasts 2022, 45, 1000–1011. [Google Scholar] [CrossRef]
- Monteys, X.; Harris, P.; Caloca, S.; Cahalane, C. Spatial Prediction of Coastal Bathymetry Based on Multispectral Satellite Imagery and Multibeam Data. Remote Sens. 2015, 7, 13782–13806. [Google Scholar] [CrossRef]
- Bandini, F.; Olesen, D.; Jakobsen, J.; Kittel, C.M.M.; Wang, S.; Garcia, M.; Bauer-Gottwein, P. Technical Note: Bathymetry Observations of Inland Water Bodies Using a Tethered Single-Beam Sonar Controlled by an Unmanned Aerial Vehicle. Hydrol. Earth Syst. Sci. 2018, 22, 4165–4181. [Google Scholar] [CrossRef]
- Alvarez, L.V.; Moreno, H.A.; Segales, A.R.; Pham, T.G.; Pillar-Little, E.A.; Chilson, P.B. Merging Unmanned Aerial Systems (UAS) Imagery and Echo Soundings with an Adaptive Sampling Technique for Bathymetric Surveys. Remote Sens. 2018, 10, 1362. [Google Scholar] [CrossRef]
- Giambastiani, Y.; Giusti, R.; Cecchi, S.; Palomba, F.; Manetti, F.; Romanelli, S.; Bottai, L. Volume Estimation of Lakes and Reservoirs Based on Aquatic Drone Surveys: The Case Study of Tuscany, Italy. J. Water Land Dev. 2020, VII–IX, 84–96. [Google Scholar] [CrossRef]
- Bogoyavlensky, V.; Bogoyavlensky, I.; Nikonov, R.; Kishankov, A. Complex of Geophysical Studies of the Seyakha Catastrophic Gas Blowout Crater on the Yamal Peninsula, Russian Arctic. Geosciences 2020, 10, 215. [Google Scholar] [CrossRef]
- Kellerer-Pirklbauer, A.; Avian, M.; Benn, D.I.; Bernsteiner, F.; Krisch, P.; Ziesler, C. Buoyant Calving and Ice-Contact Lake Evolution at Pasterze Glacier (Austria) in the Period 1998–2019. Cryosphere 2021, 15, 1237–1258. [Google Scholar] [CrossRef]
- Broere, S.; van Emmerik, T.; González Fernández, D.; Luxemburg, W.; de Schipper, M.; Cózar Cabañas, A.; van de Giesen, N. Towards Underwater Macroplastic Monitoring Using Echo Sounding. Front. Earth Sci. 2021, 9, 628704. [Google Scholar] [CrossRef]
- Ruffell, A.; Lally, A.; Rocke, B. Dronar—Geoforensic Search Sonar from a Drone. Forensic Sci. 2021, 1, 202–212. [Google Scholar] [CrossRef]
- Sanjou, M.; Kato, K.; Aizawa, W.; Okamoto, T. Development of Drone-Type Float for Surface-Velocity Measurement in Rivers. Env. Fluid Mech 2022, 22, 955–969. [Google Scholar] [CrossRef]
- Koutalakis, P.; Zaimes, G.N. River Flow Measurements Utilizing UAV-Based Surface Velocimetry and Bathymetry Coupled with Sonar. Hydrology 2022, 9, 148. [Google Scholar] [CrossRef]
- Bandini, F.; Kooij, L.; Mortensen, B.K.; Caspersen, M.B.; Thomsen, L.G.; Olesen, D.; Bauer-Gottwein, P. Mapping Inland Water Bathymetry with Ground Penetrating Radar (GPR) on Board Unmanned Aerial Systems (UASs). J. Hydrol. 2023, 616, 128789. [Google Scholar] [CrossRef]
- International Hydrographic Organization. IHO Standards for Hydrographic Surveys, 6th ed.; Special Publication No. 44; International Hydrographic Organization: Monte Carlo, Monaco, 2020. [Google Scholar]
- Costantino, D.; Vozza, G.; Alfio, V.S.; Pepe, M. Strategies for 3D Modelling of Buildings from Airborne Laser Scanner and Photogrammetric Data Based on Free-Form and Model-Driven Methods: The Case Study of the Old Town Centre of Bordeaux (France). Appl. Sci. 2021, 11, 10993. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Pereira, G.W.; Valente, D.S.M.; de Queiroz, D.M.; Santos, N.T.; Fernandes-Filho, E.I. Soil Mapping for Precision Agriculture Using Support Vector Machines Combined with Inverse Distance Weighting. Precis. Agric. 2022, 23, 1189–1204. [Google Scholar] [CrossRef]
- Pereira, G.W.; Valente, D.S.M.; Queiroz, D.M.d.; Coelho, A.L.d.F.; Costa, M.M.; Grift, T. Smart-Map: An Open-Source QGIS Plugin for Digital Mapping Using Machine Learning Techniques and Ordinary Kriging. Agronomy 2022, 12, 1350. [Google Scholar] [CrossRef]
- Ferreira, I.O.; Rodrigues, D.D.; dos Santos, G.R.; Rosa, L.M.F. IN BATHYMETRIC SURFACES: IDW OR KRIGING? Bol. Ciênc. Geod. 2017, 23, 493–508. [Google Scholar] [CrossRef]
- Parente, C.; Vallario, A. Interpolation of Single Beam Echo Sounder Data for 3D Bathymetric Model. IJACSA 2019, 10, 6–13. [Google Scholar] [CrossRef]
- Matheron, G. Traité de Géostatistique Appliquée; Editions Technip: Paris, France, 1962. [Google Scholar]
- Posa, D.; De Iaco, S. Geostatistica: Teoria e Applicazioni; Giappichelli: Turin, Italy, 2009. [Google Scholar]
- Alcaras, E.; Carnevale, L.; Parente, C. Interpolating Single-Beam Data for Sea Bottom GIS Modelling. Int. J. Emerg. Trends Eng. Res 2020, 8, 591–597. [Google Scholar] [CrossRef]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson Surface Reconstruction. In Proceedings of the Fourth Eurographics Symposium on Geometry Processing, Cagliari, Italy, 26–28 June 2006; Volume 7. [Google Scholar]
- Kazhdan, M.; Hoppe, H. Screened Poisson Surface Reconstruction. ACM Trans. Graph. (ToG) 2013, 32, 1–13. [Google Scholar] [CrossRef]
- Jones, E.J.W. Marine Geophysics; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1999; ISBN 978-0-471-98694-2. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications; Springer: Berlin/Heidelberg, Germany, 2002; Volume 2. [Google Scholar]
- Semler, Q.; Mangin, L.; Moussaoui, A.; Semin, E. DEVELOPMENT OF A LOW-COST CENTIMETRIC GNSS POSITIONING SOLUTION FOR ANDROID APPLICATIONS. In International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences; EBSCO: Ipswich, MA, USA, 2019. [Google Scholar]
- Takasu, T.; Yasuda, A. Development of the Low-Cost RTK-GPS Receiver with an Open Source Program Package RTKLIB. In International Symposium on GPS/GNSS; International Convention Center Jeju Korea: Seogwipo-si, Republic of Korea, 2009; Volume 1. [Google Scholar]
- Rtklibexplorer Rtklibexplorer (Rtklibexplorer)/Repositories GitHub. Available online: https://github.com/rtklibexplorer?tab=repositories (accessed on 8 January 2023).
- Jivthesh, M.R.; Gaushik, M.R.; Shibu, N.B.S.; Raj, D.; Rao, S.N. A Comprehensive Survey of Web and Mobile Apps for Fishermen. In Proceedings of the Data, Engineering and Applications; Sharma, S., Peng, S.-L., Agrawal, J., Shukla, R.K., Le, D.-N., Eds.; Springer Nature: Singapore, 2022; pp. 199–211. [Google Scholar]
- Tétreault, P.; Kouba, J.; Héroux, P.; Legree, P. CSRS-PPP: An Internet Service for GPS User Access to the Canadian Spatial Reference Frame. Geomatica 2005, 59, 17–28. [Google Scholar] [CrossRef]
- Pepe, M.; Costantino, D.; Vozza, G.; Alfio, V.S. Comparison of Two Approaches to GNSS Positioning Using Code Pseudoranges Generated by Smartphone Device. Appl. Sci. 2021, 11, 4787. [Google Scholar] [CrossRef]
- Cardellicchio, N.; Annicchiarico, C.; Di Leo, A.; Giandomenico, S.; Spada, L. The Mar Piccolo of Taranto: An Interesting Marine Ecosystem for the Environmental Problems Studies. Environ. Sci. Pollut. Res. 2016, 23, 12495–12501. [Google Scholar] [CrossRef]
- Di Leo, A.; Annicchiarico, C.; Cardellicchio, N.; Giandomenico, S.; Conversano, M.; Castellano, G.; Basile, F.; Martinelli, W.; Scortichini, G.; Spada, L. Monitoring of PCDD/Fs and Dioxin-like PCBs and Seasonal Variations in Mussels from the Mar Grande and the Mar Piccolo of Taranto (Ionian Sea, Southern Italy). Environ. Sci. Pollut. Res. 2014, 21, 13196–13207. [Google Scholar] [CrossRef]
- Girardeau-Montaut, D. CloudCompare; EDF R&D Telecom ParisTech: Paris, France, 2016. [Google Scholar]
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. Meshlab: An Open-Source Mesh Processing Tool. In Proceedings of the Eurographics Italian Chapter Conference, Salerno, Italy, 2–4 July 2008; Volume 2008, pp. 129–136. [Google Scholar]
- Pepe, M.; Alfio, V.S.; Costantino, D. UAV Platforms and the SfM-MVS Approach in the 3D Surveys and Modelling: A Review in the Cultural Heritage Field. Appl. Sci. 2022, 12, 12886. [Google Scholar] [CrossRef]
- Costantino, D.; Vozza, G.; Pepe, M.; Alfio, V.S. Smartphone LiDAR Technologies for Surveying and Reality Modelling in Urban Scenarios: Evaluation Methods, Performance and Challenges. Appl. Syst. Innov. 2022, 5, 63. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Deeper Smart Sonar Pro+ 2 | Deeper Smart Sonar CHIRP+ |
|---|---|---|
| Image |  |  |
| Beam cone | 47°-20°-7° | 47°-20°-7° |
| Frequency | 100-240-675 kHz | 100-240-675 kHz |
| GNSS | GPS, GLONASS, Galileo, BeiDou, QZSS | GPS, GLONASS, Galileo, BeiDou, QZSS |
| Wi-Fi connection range | 100 m | 100 m |
| Sonar scan rate | 15x/s | 15x/s |
| Depth range min/max | 0.15–100 m | 0.15–100 m |
| Weight | 90 g | 90 g |
| Dimensions | Ø 65 mm | Ø 65 mm |
| Operating temperature | −20 °C/40 °C | −20 °C/40 °C |
| Device | SimpleRTK2B |
|---|---|
| Image |  |
| GNSS Module | ZED-F9P |
| Constellation | GPS, GLONASS, Galileo, Beidou |
| Frequency | L1C/A L2C, L1OF L2OF, E1-B/C E5b, B1I B2I |
| Bluetooth connection module | AS-XBEE-BT-2.4-INT-00 |
| Antenna | Lightweight helical for multiband GNSS (IP67) |
| Weight | 20 g |
| Dimensions | 69 × 53 mm |
| Device | Positioning | Obs. Time (s) | Data Sample (no.) | Main Data |
|---|---|---|---|---|
| Deeper GNSS CHIRP+ | SPP | 28,800 | 28,800 | Latitude, longitude |
| Deeper GNSS Pro+ 2 | SPP | 28,800 | 28,800 | Latitude, longitude |
| G > S > P Sys | SPP | 28,800 | 28,800 | Latitude, longitude, ellipsoid height |
| Post-Processing Static | 28,800 | 28,800 | Latitude, longitude, ellipsoid height | |
| PPP | 28,800 | 28,800 | Latitude, longitude, ellipsoid height |
| Path Length [m] | Device | Positioning | Data Sample (no.) | Main Data |
|---|---|---|---|---|
| ~11.50 linear | Deeper GNSS CHIRP+ | SPP | 150 | Latitude, longitude |
| Deeper GNSS Pro+ 2 | SPP | 150 | Latitude, longitude | |
| G > S > P Sys | SPP | 150 | Latitude, longitude | |
| PPP-kinematic | 150 | Latitude, longitude | ||
| PPK | 150 | Latitude, longitude |
| Path Length [m] | Device | Positioning | Data Sample (no.) | Main Data |
|---|---|---|---|---|
| ~26.84 rectangular | G > S > P Sys | SPP | 1000 | Latitude, longitude, ellipsoidal height |
| PPP-kinematic | 1000 | Latitude, longitude, ellipsoidal height | ||
| PPK | 1000 | Latitude, longitude, ellipsoidal height |
| Device | Real Depth (m) | Water | Temperature (°C) | Data Sample (no.) | Main Data |
|---|---|---|---|---|---|
| Deeper Smart Sonar CHIRP+ | 0.9 | Fresh | 22.27 | 3700 | Depth |
| Salt~37.8‰ | 20.90 | 3700 | Depth | ||
| 1.52 | Fresh | 22.27 | 3700 | Depth | |
| Salt~37.8‰ | 20.90 | 3700 | Depth | ||
| Deeper Smart Sonar Pro+ 2 | 0.9 | Fresh | 22.27 | 3700 | Depth |
| Salt~37.8‰ | 20.90 | 3700 | Depth | ||
| 1.52 | Fresh | 22.27 | 3700 | Depth | |
| Salt~37.8‰ | 20.90 | 3700 | Depth |
| Area Surveyed (sqm) | Transects (no.) | Device | File Produced | Positioning | Points Surveyed (no.) | Main Data |
|---|---|---|---|---|---|---|
| ~30,000 | 16 + 1 | Deeper GNSS CHIRP+ | File Sonar | SPP | 1659 | Latitude, longitude, depth |
| SimpleRTK2B | File SPP | SPP | 6098 | Latitude, longitude, ellipsoidal height, GPST | ||
| File PPL | PPK | 6098 | Latitude, longitude, ellipsoidal height, GPST |
| Area Surveyed (sqm) | Transects (no.) | Device | File Produced | Positioning | Points Surveyed (no.) | Main Data |
|---|---|---|---|---|---|---|
| ~40.01 | 2 + 2 | Deeper GNSS CHIRP+ | File Sonar | SPP | 111 | Latitude, longitude, depth |
| SimpleRTK2B | File SPP | SPP | 982 | Latitude, longitude, ellipsoidal height, GPST | ||
| File PPL | PPK | 982 | Latitude, longitude, ellipsoidal height, GPST |
| Device | Positioning | Obs. Time (s) | ΔN (m) | ΔE (m) | ΔU (m) | σN (m) | σE (m) | σU (m) | THU (m) |
|---|---|---|---|---|---|---|---|---|---|
| Deeper GNSS CHIRP+ | SPP | 28,800 | 2.621 | 0.761 | ND | 0.877 | 0.624 | ND | 2.150 |
| Deeper GNSS Pro+ 2 | SPP | 28,800 | 3.537 | 1.706 | ND | 0.674 | 0.980 | ND | 2.401 |
| G > S > P Sys | SPP | 28,800 | 2.484 | 0.570 | 2.018 | 0.194 | 0.199 | 0.659 | 0.487 |
| Device | Positioning | Obs. Time (s) | ΔN (m) | ΔE (m) | ΔU (m) | σN (m) | σE (m) | σU (m) | THU (m) |
|---|---|---|---|---|---|---|---|---|---|
| G > S > P Sys | Post-Processing Static | 300 | 0.001 | 0.006 | 0.031 | 0.002 | 0.002 | 0.004 | 0.005 |
| 900 | 0.001 | 0.006 | 0.030 | 0.002 | 0.002 | 0.005 | 0.005 | ||
| 1800 | 0.001 | 0.006 | 0.031 | 0.001 | 0.002 | 0.006 | 0.004 | ||
| 3600 | 0.001 | 0.006 | 0.031 | 0.001 | 0.001 | 0.006 | 0.003 | ||
| PPP | 300 | 0.667 | 0.632 | 0.249 | 0.474 | 0.906 | 1.107 | 2.220 | |
| 900 | 0.639 | 0.712 | 0.074 | 0.134 | 0.317 | 0.320 | 0.778 | ||
| 1800 | 0.636 | 0.765 | 0.043 | 0.058 | 0.143 | 0.148 | 0.352 | ||
| 3600 | 0.646 | 0.750 | 0.026 | 0.010 | 0.022 | 0.033 | 0.053 |
| Path Length (m) | Device | Positioning | µ2D (m) | σ2D (m) | THU (m) |
|---|---|---|---|---|---|
| ~11.50 linear | Deeper GNSS CHIRP+ | SPP | 2.007 | 1.911 | 4.682 |
| Deeper GNSS Pro+ 2 | SPP | 0.700 | 0.482 | 1.180 | |
| G > S > P Sys | SPP | 1.034 | 0.095 | 0.232 | |
| PPP-kinematic | 0.640 | 0.092 | 0.226 | ||
| PPK | 0.043 | 0.031 | 0.075 |
| Path Length (m) | Device | Positioning | µ2D (m) | σ2D (m) | µ3D (m) | σ3D (m) | THU (m) |
|---|---|---|---|---|---|---|---|
| ~26.84 rectangular | G > S > P Sys | SPP | 0.438 | 0.390 | 0.524 | 0.350 | 0.956 |
| PPP-kinematic | 0.417 | 0.309 | 0.465 | 0.290 | 0.757 | ||
| PPK | 0.037 | 0.040 | 0.061 | 0.060 | 0.098 |
| Device | Real depth (m) | Water | ΔV (m) | σV (m) | TVU (m) |
|---|---|---|---|---|---|
| Deeper Smart Sonar CHIRP+ | 0.9 | Fresh | 0.02 | 0.00 | 0.00 |
| Salt~37.8‰ | 0.02 | 0.02 | 0.04 | ||
| 1.52 | Fresh | 0.01 | 0.00 | 0.00 | |
| Salt~37.8‰ | 0.01 | 0.11 | 0.21 | ||
| Deeper Smart Sonar Pro+ 2 | 0.9 | Fresh | 0.03 | 0.00 | 0.00 |
| Salt~37.8‰ | 0.02 | 0.02 | 0.04 | ||
| 1.52 | Fresh | 0.02 | 0.00 | 0.01 | |
| Salt~37.8‰ | 0.04 | 0.06 | 0.12 |
| Model | Example Images | Interpolation Method | µ3D (m) | σ3D (m) |
|---|---|---|---|---|
| 3D model FCR – natural surface |  | Forest-based Classification and Regression | 0.0020 | 0.0323 |
| 3D model OK – natural surface |  | Ordinary Kriging | 0.0043 | 0.0283 |
| 3D model IDW – natural surface |  | IDW | 0.0059 | 0.0317 |
| 3D model pool – artificial structure |  | Linear interpolation | 0.0124 | 0.0245 |
| 3D model bottom pool – artificial structure |  | Linear interpolation | 0.0002 | 0.0140 |
| Criteria | Order 2 | Order 1 (a/b) | Special Order | Exclusive Order |
|---|---|---|---|---|
| THU | 20 m + 10% of depth | 5 m + 5% of depth | 2 m | 1 m |
| TVU | a = 1.0 m b = 0.023 | a = 0.5 m b = 0.013 | a = 0.25 m b = 0.0075 | a = 0.15 m b = 0.0075 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vozza, G.; Costantino, D.; Pepe, M.; Alfio, V.S. Smart Sensors System Based on Smartphones and Methodology for 3D Modelling in Shallow Water Scenarios. Appl. Syst. Innov. 2023, 6, 28. https://doi.org/10.3390/asi6010028
Vozza G, Costantino D, Pepe M, Alfio VS. Smart Sensors System Based on Smartphones and Methodology for 3D Modelling in Shallow Water Scenarios. Applied System Innovation. 2023; 6(1):28. https://doi.org/10.3390/asi6010028
Chicago/Turabian StyleVozza, Gabriele, Domenica Costantino, Massimiliano Pepe, and Vincenzo Saverio Alfio. 2023. "Smart Sensors System Based on Smartphones and Methodology for 3D Modelling in Shallow Water Scenarios" Applied System Innovation 6, no. 1: 28. https://doi.org/10.3390/asi6010028
APA StyleVozza, G., Costantino, D., Pepe, M., & Alfio, V. S. (2023). Smart Sensors System Based on Smartphones and Methodology for 3D Modelling in Shallow Water Scenarios. Applied System Innovation, 6(1), 28. https://doi.org/10.3390/asi6010028